55
工學碩士學位請求論文 약계자 영역에서의 PMSM의 위치 센서리스 제어 Position Sensorless Control of PMSM in the Field-Weakening Region 2005年 2月 仁荷大學校 大學院 電氣工學科(電氣에너지 및 材料專攻) 李 正 欽
工學碩士學位請求論文
약계자 역에서의 PMSM의
위치 센서리스 제어
Position Sensorless Control of PMSM
in the Field-Weakening Region
2005年 2月
仁荷大學校 大學院
電氣工學科(電氣에너지 및 材料專攻)
李 正 欽
工學碩士學位請求論文
약계자 역에서의 PMSM의
위치 센서리스 제어
Position Sensorless Control of PMSM
in the Field-Weakening Region
2005年 2月
指道敎授 金 榮 石
이 論文을 碩士學位 論文으로 提出함
仁荷大學校 大學院
電氣工學科(電氣에너지 및 材料專攻)
李 正 欽
이 論文을 李 正 欽의 碩士學位論文으로 認定함
2005 年 2 月
主審 : ㊞
副審 : ㊞
委員 : ㊞
목 차
요약.........................................................................ⅰ
ABSTRACT...........................................................ⅱ
그림목차..................................................................iii
표 목 차..................................................................ⅵ
제 1 장 서론................................................................1
1. 1 연구 배경 및 필요성..........................................1
1. 2 연구 목적...........................................................3
1. 3 연구 내용...........................................................3
1. 4 논문 구성...........................................................4
제 2 장 구자석 동기전동기의 수학적 모델링.........6
제 3 장 순시무효전력을 이용한 센서리스 제어
알고리즘.........................................................15
3. 1 전류 관측기의 구성...........................................15
3. 2 순시무효전력을 이용한 추정속도 오차보상........17
제 4 장 약계자 제어 알고리즘...................................22
제 5 장 시스템의 구성...............................................26
제 6 장 결과 및 고찰.................................................29
제 7 장 결 론............................................................42
참고문헌........................................................................43
- i -
요 약
원통형 구자석 동기전동기는 회전자의 구자석으로부터 자속
을 공급받기 때문에 원활한 토크제어를 위해 회전자의 정확한 위치
를 알아야한다. 이런 위치 정보를 얻기 위해서는 레졸버(Resolver)나
절대 엔코더(Absolute Encoder)등의 위치검출기를 전동기의 축에
부착하여야 한다. 그러나 위치검출기는 일반적으로 가격이 고가일
뿐만 아니라 별도의 복잡한 하드웨어가 제어기에 구성되어야하는
단점이 있다. 이외에도 위치검출기를 전동기의 축에 부착함으로 인
한 전동기의 크기와 관성의 증대 등의 문제가 발생하게 된다. 따라
서 원통형 구자석 동기전동기의 제어상 큰 문제점인 위치 센서를
사용하지 않고 간접적으로 회전자의 위치를 얻고자하는 센서리스
제어에 관한 연구가 활발히 진행되고 있다. 그리고 원통형 구자석
동기전동기는 정격속도 이상으로 구동하기 위해서는 약계자 제어가
요구된다.
본 논문에서는 약계자 역에서의 원통형 구자석 동기전동기의
위치 센서리스 제어를 제안한다. 위치 센서리스 제어 알고리즘은 순
시무효전력을 이용한 방법으로 기계적 제정수에 강인한 특성을 갖
는다. 순시무효전력은 역기전력과 회전자 전류의 벡터 곱으로 나타
낼수 있으며 역기전력은 속도에 대한 정보를 갖고 있다. 그러므로
원통형 구자석 동기전동기의 전압방정식으로부터 구한 추정속도
는 순시무효전력을 이용해 속도의 오차분을 보상할 수 있다.
본 논문에서 사용한 약계자 제어 방법은 정상 상태 뿐만 아니라
과도 상태에서도 안정한 동작을 한다. 이 방법은 전류 제어기로부터
피드백되는 d, q축 지령전압을 이용해 d, q축 지령전류를 계산하기
때문에 전류제어기의 포화를 방지한다.
- ii -
ABSTRACT
The mechanical informations such as the rotor speed and angle
are required to operate the Cylindrical Permanent Magnet
Synchronous Motor(PMSM). A resolver or encoder is typically
used to supply the mechanical informations. This position sensor
adds length to the machine, raises system cost, increases rotor
inertia and requires additional devices. As the result, there has
been a significant interest in the development of sensorless
strategies to eliminate the position sensor. To extend the speed
range of the PMSM in the constant horsepower region, the field
weakening control is applied.
This paper presents the position sensorless vector control of a
cylindrical permanent magnet synchronous motor(PMSM) in the
field weakening region. The position sensorless algorithm using
an instantaneous reactive power of the PMSM is proposed. An
instantaneous reactive power can be obtained from the vector
product of rotor currents and back emf of the PMSM. Back emf
includes the information of rotor speed. So the estimated speed
can be yielded from the voltage equation of the PMSM. In other
words, the estimated speed is compensated by using an
instantaneous reactive power.
A method of field weakening control using in this paper
establishes the stable operation of both the transient state and
steady state. This scheme uses the outer voltage regulation loop
by which the reference of d and q axis current is calculated and
feeded to the current controller to prevent the saturation of
current controller.
- iii -
그 림 목 차
그림 2.1 구자석 동기전동기의 등가회로 6
그림 2.2 고정자 권선 및 전류 벡터 7
그림 2.3 고정자 좌표계와 회전자 좌표계의 상관관계 11
그림 3.1 실제 및 추정전류에 대한 위치추정오차 19
그림 3.2 제안된 순시무효전력을 이용한 위치추정 알고리즘 21
그림 4.1 약계자 제어시 전류 및 전압제한조건에 의한
전류제한 궤적 24
그림 4.2 약계자 제어 알고리즘 24
그림 4.3 약계자 제어 알고리즘을 적용한 순시무효전력을
이용한 센서리스 제어 알고리즘 25
그림 5.1 구자석 동기전동기 전체 구동 시스템 27
그림 6.1 무부하시 3450[rpm]에서 실제속도(상)
및 추정속도(하) 30
그림 6.2 무부하시 3450[rpm]에서 실제위치(상)
및 추정위치(하) 30
그림 6.3 무부하시 3450[rpm]에서 추정속도(상)
및 d축전류(하) 31
그림 6.4 3450[rpm]에서 -3450[rpm]으로 무부하
정역운전시 실제속도(상) 및 추정속도(하) 31
그림 6.5 3450[rpm]에서 -3450[rpm]으로 무부하
정역운전시 실제위치(상) 및 추정위치(하) 32
- iv -
그림 6.6 3450[rpm]에서 -3450[rpm]으로 무부하
정역운전시 추정속도(상) 및 d축전류(하) 32
그림 6.7 3200[rpm]에서 25% 부하인가시 선전류(상)
및 추정속도(하) 35
그림 6.8 3200[rpm]에서 25%부하 기동시 실제속도(상)
및 추정속도(하) 35
그림 6.9 3200[rpm]에서 25%부하 기동시 실제위치(상)
및 추정위치(하) 36
그림 6.10 3200[rpm]에서 -3200[rpm]으로 25%부하
정역운전시 선전류(상) 및 추정속도(하) 36
그림 6.11 3200[rpm]에서 -3200[rpm]으로 25%부하
정역운전시 실제위치(상) 및 추정위치(하) 37
그림 6.12 3300[rpm]에서 15%부하 기동시 실제속도(상)
및 추정속도(하) 37
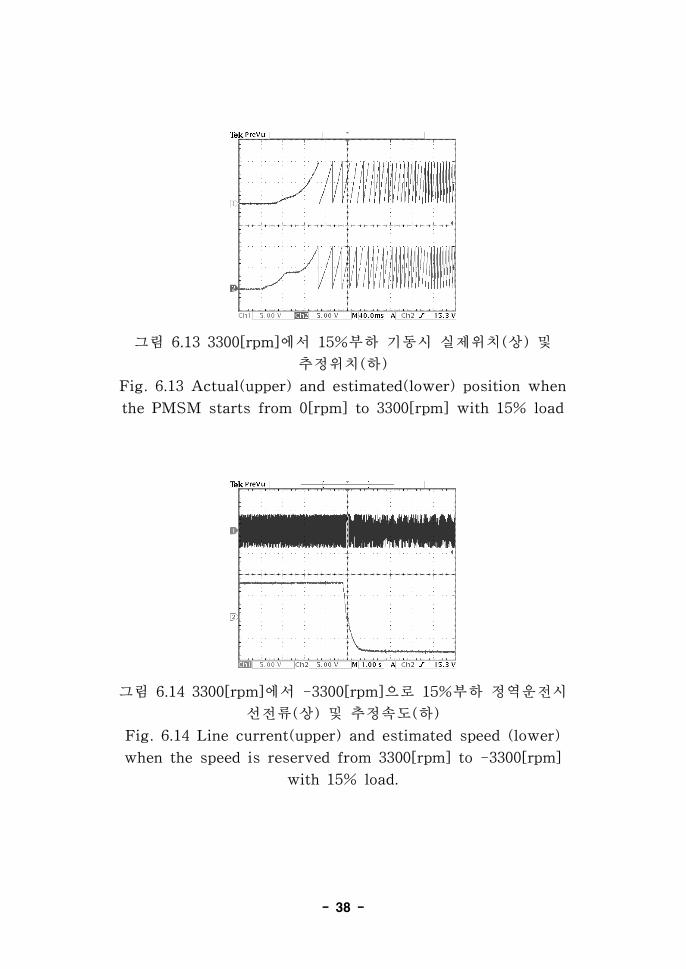
그림 6.13 3300[rpm]에서 15%부하 기동시 실제위치(상)
및 추정위치(하) 38
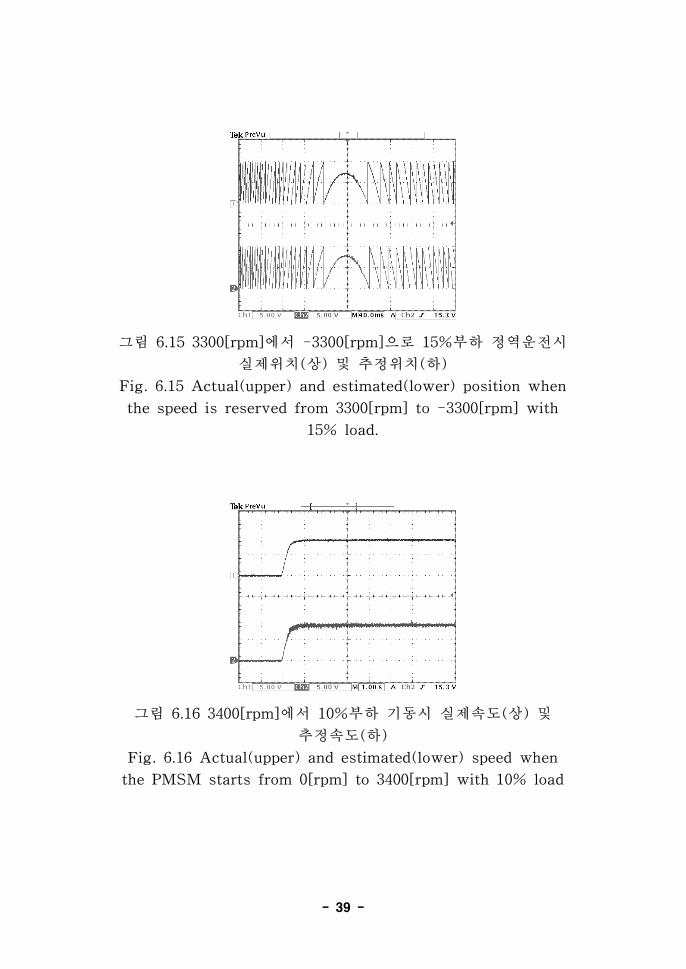
그림 6.14 3300[rpm]에서 -3300[rpm]으로 15%부하
정역운전시 선전류(상) 및 추정속도(하) 38
그림 6.15 3300[rpm]에서 -3300[rpm]으로 15%부하
정역운전시 실제위치(상) 및 추정위치(하) 39
그림 6.16 3400[rpm]에서 10%부하 기동시 실제속도(상)
및 추정속도(하) 39
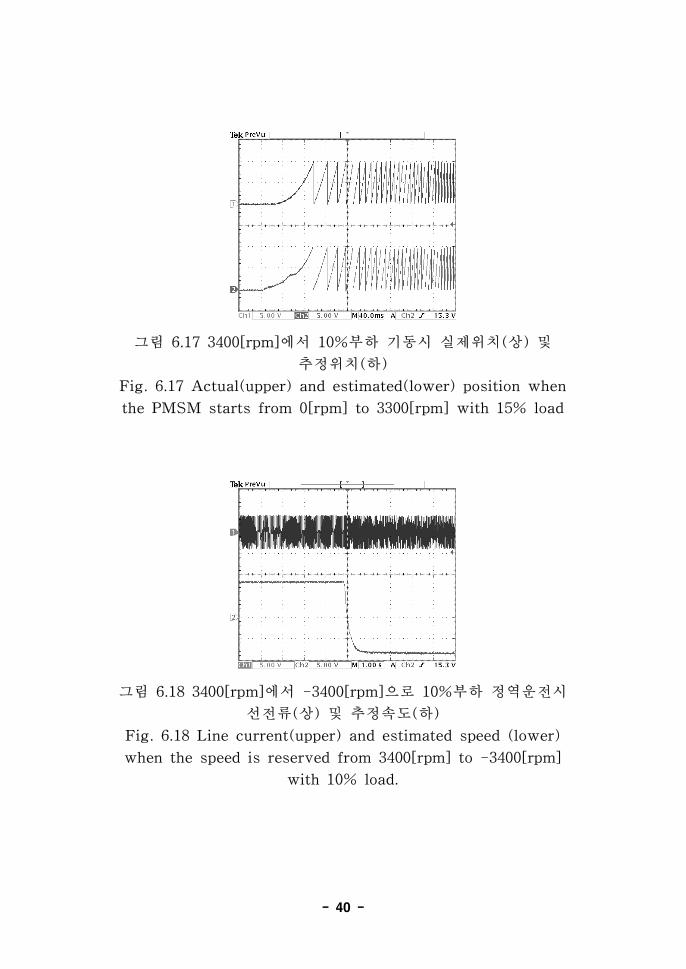
그림 6.17 3400[rpm]에서 10%부하 기동시 실제위치(상)
및 추정위치(하) 40
- v -
그림 6.18 3400[rpm]에서 -3400[rpm]으로 10%부하
정역운전시 선전류(상) 및 추정속도(하) 40
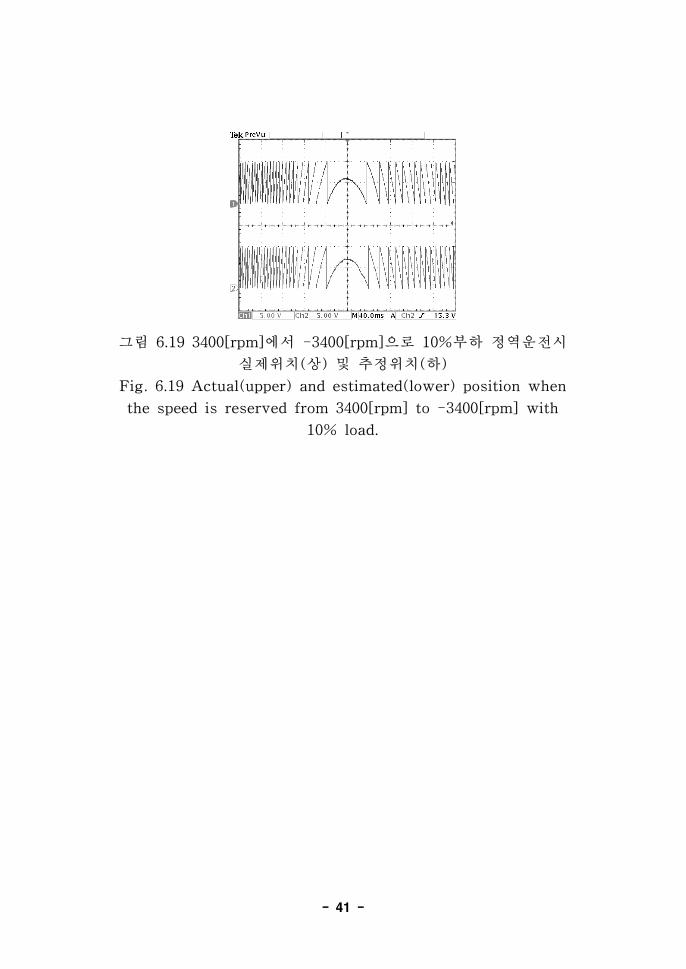
그림 6.19 3400[rpm]에서 -3400[rpm]으로 10%부하
정역운전시 실제위치(상) 및 추정위치(하) 41
- vi -
표 목 차
표 1. 구자석 동기전동기의 규격 26
표 2. 속도별 정상상태에서 부하인가시 d축 및 q축 전류변화 34
- 1 -
제 1 장 서 론
1.1 연구배경 및 필요성
산업계의 각종 기계 및 플랜트에 있어서 정 한 속도제어·위치제
어나 급가감속 운전등을 필요로 하는 가변속 구동 시스템으로 계자
전류와 전기자 전류를 독립적으로 제어가 가능하여 자속과 토오크
제어가 용이한 직류전동기가 사용되어 왔다. 그러나 직류전동기는
정류자와 브러시의 마모에 따른 보수 점검이 필요하다는 단점이 있
다. 또한 직류전동기는 정류자의 정류 한계상 고속화·고압화에 한계
가 있고 대용량화에도 한계가 있으며 설치장소에도 제약을 받는다.
이러한 이유로 교류전동기의 가변속 시스템의 실용화가 진행되어
왔다. 이것은 전력용 반도체소자를 이용한 정지형 주파수변환기기의
소형·고성능화와 마이크로프로세서 등의 발달에 따라 종래에는 기
술적으로도 가격적으로도 곤란했던 교류전동기의 주파수제어를 용
이하게 행할 수 있게 되었기 때문이다.
교류전동기 중에서도 특히 자속을 생성하기 위해 구자석을 계
자로 사용하는 PMSM(Permanent Magnet Synchronous Motor)은
단위 무게 당 토크 비율 및 효율이 다른 전동기에 비해 월등히 높
고, 제어의 면에서도 벡터제어에 의한 토오크 제어시 회전자측 전류
를 고려할 필요가 없는 장점을 가지고 있기 때문에 정 속응 제어
를 요구하는 산업용 기기의 응용 분야에 서보용으로 폭 넓게 사용
되고 있다.
원통형 구자석 동기전동기는 회전자에 부착되어진 구자석으
- 2 -
로부터 자속을 공급받기 때문에 벡터제어를 위해서는 항상 회전자
의 정확한 위치 정보를 알아야한다. 이런 위치 정보를 얻기 위해서
는 레졸버(Resolver)나 절대 엔코더(Absolute Encoder)등의 위치검
출기를 전동기의 축에 부착하여야 한다. 그러나 위치검출기는 일반
적으로 가격이 고가일 뿐만 아니라 별도의 복잡한 하드웨어가 제어
기에 구성되어야하는 단점이 있다. 또한 진동 및 습도 등의 주위환
경에 대한 향을 많이 받기 때문에 사용환경에 제한을 받는다. 이
외에도 위치검출기를 전동기의 축에 부착함으로 인한 전동기의 크
기와 관성의 증대 등의 문제가 발생하게 된다. 따라서 원통형 구
자석 동기전동기의 제어상 큰 문제점인 위치 센서를 사용하지 않고
간접적으로 회전자의 위치를 얻고자하는 센서리스 제어에 관한 연
구가 활발히 진행되고 있다[1∼4]. 그리고 원통형 구자석 동기전
동기는 정격속도 이상이나 DC링크 전압이 작은 특수한 상황에서 약
계자 제어가 요구된다. 이러한 원통형 구자석 동기전동기의 약계
자 제어 방법에는 전동기의 제정수와 전류, 전압들로부터 각 순시치
마다 최적의 제어 위치를 연산하여 실시간으로 필요한 전압을 발생
시켜 제어하는 토오크 최적제어 방법[5]과 전동기의 제정수로부터
계자 전류 지령치를 미리 계산하여 그 값이 전동기에서 확보되도록
전류 제어를 실시하는 직접제어 방법[6]과 전동기의 제정수를 이용
하지 않고 전압, 전류등의 변수들로부터 계자 전류의 지령치를 만들
어 제어하는 간접제어 방법이 있다. 이 간접제어 방법에는 전류값을
이용한 전류제어 방법과 전압값을 이용한 전압제어 방법이 있다
[7,8]. 그러나 이러한 약계자 제어가 센서리스 알고리즘에 적용된 사
례는 거의 없다.
- 3 -
1.2 연구목적
앞절에서 기술한 바와 같이 위치검출기가 갖고 있는 여러 문제점
을 해결하기 위하여 구자석 동기전동기의 센서리스제어에 관련된
연구가 활발히 진행되어 왔다. 그러나 실제 시스템 적용시 간단한
알고리즘의 구현, 정격속도 이상의 광범위한 운전 역 특성 그리고
전동기의 제 정수에 향을 받지 않는 센서리스 제어에 대한 연구
결과는 거의 없다. 따라서 구자석 동기전동기의 정격속도 이상의
광범위한 속도추정이 가능하고 전동기의 제 정수에 향을 받지 않
는 센서리스 제어에 대한 연구가 절실히 필요하다.
따라서 본 논문에서는 구자석 동기전동기의 위치 센서리스 제
어에서 전동기의 기계적 제 정수에 대한 불확실성과 가변성에 대한
문제를 극복하면서 정격속도 이상의 광범위한 속도 추정이 가능한
알고리즘의 개발을 목적으로 한다.
1.3 연구내용
본 논문에서는 이상의 연구목적을 만족시키는 약계자 역에서의
고속 구동을 위한 원통형 구자석 동기전동기의 순시무효전력을
이용한 위치 센서리스 제어 알고리즘을 개발하 다.
1.1절에서 언급한 약계자 제어 방법중 직접제어 방법은 전동기 제
정수로부터 연산에 의해 계자 전류를 제어하기 때문에 제정수의 변
동에 매우 민감하다. 또한, 간접제어 방법의 전류제어 방법은 실제
토오크 전류와 지령 토오크 전류의 오차를 이용한 방법으로 파라미
- 4 -
터의 변동에 향을 받지는 않으나 부하의 변동시 직축전류 지령에
민감한 응답을 보여 제어에 불안정을 초래할 수 있다. 본 논문에서
는 간접 제어 방법의 전압 제어 방법을 순시무효전력을 이용한 센
서리스 알고리즘[9]에 적용하 다. 이 방법은 약계자 역 즉 정격
속도 이상의 속도제어시 전압의 부족현상이 발생하고 이 부족분 전
압에 해당하는 직축 전류를 계자 자속의 반대 방향으로 주입함으로
서 횡축 전압에 여유를 확보하는 전압 궤환형 방법으로 파라미터의
변동에 향을 받지 않는다. 본 논문에서 이 방법을 정격속도가
3000rpm이고 최대 속도가 3500rpm인 원통형 구자석 동기전동기
에 적용하 고 정격속도의 115%인 3450rpm에서 실험을 수행하
다.
1.4 논문 구성
원통형 구자석 동기전동기의 고속 운전 역에서 위치 센서리
스 제어를 위한 본 논문은 다음과 같이 구성되어 진다.
제 1장에서는 약계자 역 즉 정격속도 이상에서의 구자석 동
기전동기의 위치 센서리스 제어에 대한 연구배경과 필요성, 연구 목
적 및 내용에 대하여 언급한다.
제 2장에서는 구자석 동기전동기의 수학적 모델링에 대해 간단
하게 언급한다.
제 3장에서는 순시무효전력을 이용한 구자석 동기전동기의 위
치 센서리스 제어에 대해 언급하고 제 4장에서는 이 위치 센서리스
제어를 정격속도 이상에서 구동 시키기위한 약계자 제어 알고리즘
에 대해 언급한다.
- 5 -
제 5장에서는 약계자 제어 역에서의 순시무효전력을 이용한
구자석 동기전동기의 위치 센서리스 제어를 위한 시스템의 구성에
대해 설명한다.
제 6장에서는 실험 파형을 통해 제안된 알고리즘의 안정성 및 성
능을 검증한다.
제 7장에서는 약계자 역에서의 구자석 동기전동기의 위치 센
서리스 제어에 대한 결론을 맺는다.
- 6 -
제 2 장 구자석 동기전동기의 수학적 모델링
이 장에서는 관측기의 모델이 되는 구자석 동기전동기(PMSM)
를 모델링한다. 본 논문에서는 PMSM중에서도 계자 구조가 원통형
태인 원통형 구자석 동기전동기를 고려한다.
PMSM은 구자석을 사용하므로 기자력원을 일정한 전류원에 의
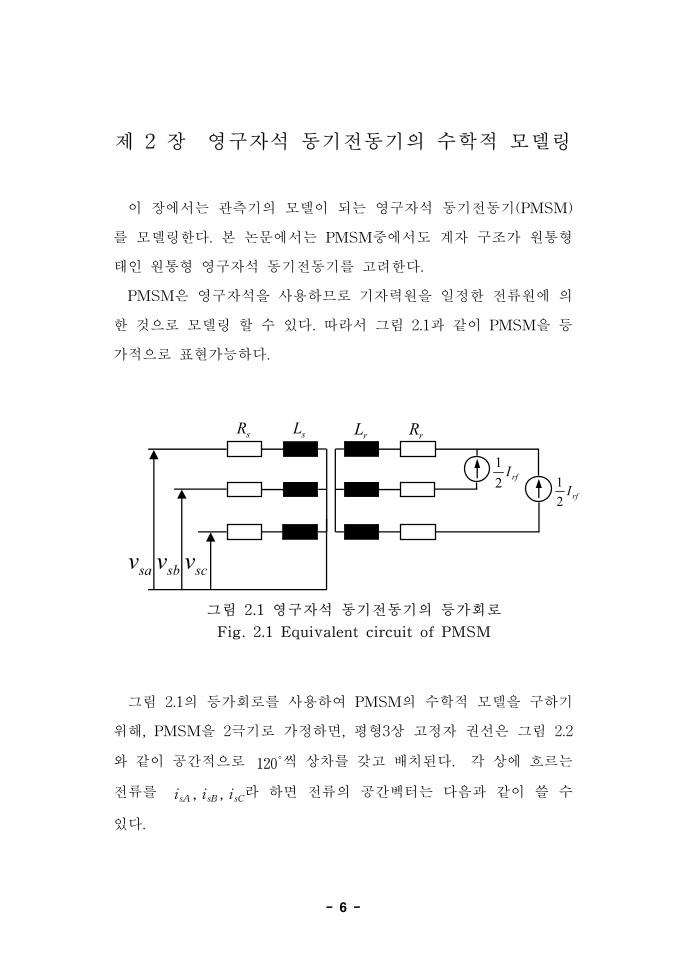
한 것으로 모델링 할 수 있다. 따라서 그림 2.1과 같이 PMSM을 등
가적으로 표현가능하다.
그림 2.1 구자석 동기전동기의 등가회로
Fig. 2.1 Equivalent circuit of PMSM
rfI21
sR rRsL rL
scvsbvsav
rfI21
그림 2.1의 등가회로를 사용하여 PMSM의 수학적 모델을 구하기
위해, PMSM을 2극기로 가정하면, 평형3상 고정자 권선은 그림 2.2
와 같이 공간적으로 120˚씩 상차를 갖고 배치된다. 각 상에 흐르는
전류를 i sA, i sB, i sC라 하면 전류의 공간벡터는 다음과 같이 쓸 수
있다.
- 7 -
i s (t)=23[ i sA (t)+a i sB (t)+a
2i sC (t)]=│ i s│e
jθ r (2.1)
여기서, a= e j2π/3,a 2= e j4π/3
식 (2.1)로부터 각각의 상전류는 다음과 같게된다.
i sA(t)= I s cos(ωt-φ s )
i sB(t)= I s cos(ωt-φ s-2π/3) (2.2)
i sC(t)= I s cos(ωt-φ s-4π/3)
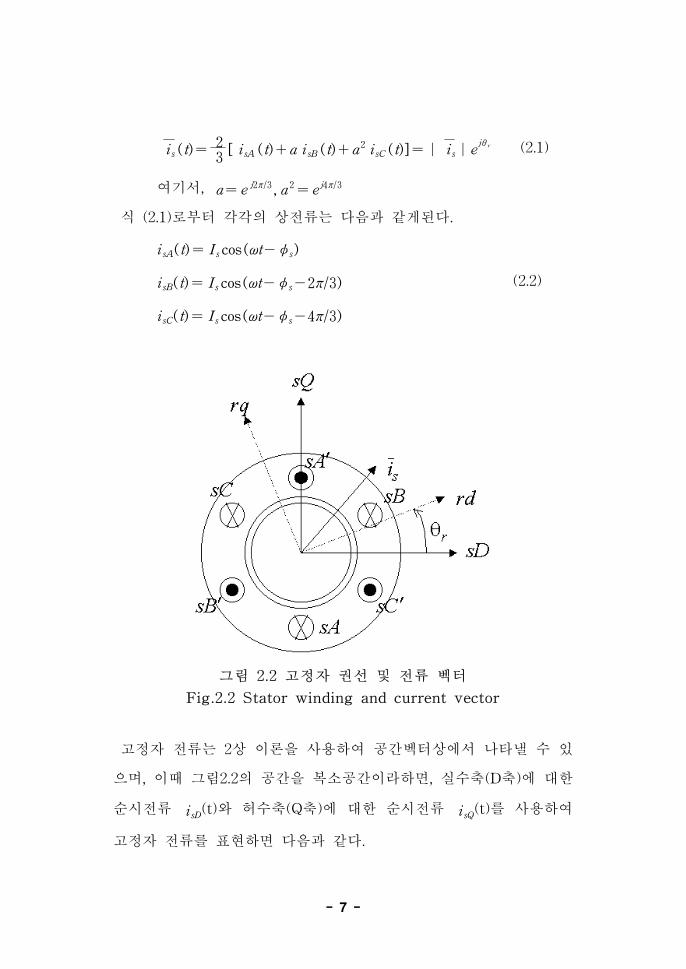
그림 2.2 고정자 권선 및 전류 벡터
Fig.2.2 Stator winding and current vector
고정자 전류는 2상 이론을 사용하여 공간벡터상에서 나타낼 수 있
으며, 이때 그림2.2의 공간을 복소공간이라하면, 실수축(D축)에 대한
순시전류 i sD(t)와 허수축(Q축)에 대한 순시전류 i sQ(t)를 사용하여
고정자 전류를 표현하면 다음과 같다.

- 8 -
i s= i sD(t)+ j i sQ(t) (2.3)
또한, 3상에서 2상으로 변환한 전류 i sD(t)와 i sQ(t)는 다음과 같이
쓸 수 있다.
i sD(t)=23[ i sA (t)-
12i sB(t)-
12i sC(t) ] (2.4)
i sQ(t)=13[ i sB (t)- i sC(t) ] (2.5)
한편 회전자측 전류는 그림 2.1로부터 가상적인 3상 회전자 전류를
각각 i ra , i rb , i rc 라고 정의하면 다음과 같이 표현할 수 있다.
i ra(t)= I rf
i rb(t)=-12I rf (2.6)
i rc(t)=-12I rf
역시 가상의 3상 권선이 공간적으로 120°씩 상차를 갖고 서로 배치
되어 있다고 보고, 회전자 전류의 공간벡터는 다음과 같이 표현될
수 있다.
i r(t)=23[ i ra (t)+ai rb(t)+a
2i rc(t) ]= I rf (2.7)
고정자 각 상에 대한 전압과 전압의 합성값 역시 앞에서 구한 고
정자 전류와 같은 원리로 구할 수 있다. 고정자 각 상에 인가되는

- 9 -
전압을 각각 v sA(t) , v sB(t) , v sC(t)라 하면 고정자 전압의 공간벡터
는 다음과 같다.
v s=23[v sA (t)+av sB(t)+a
2v sC(t) ]= v sD+ jv sQ (2.8)
3상 전압을 2상으로 변환하 을 때 실수축 전압을 v sD , 허수축 전
압을 v sQ 라고 하면 다음과 같은 수식으로의 표현이 가능하다.
v sD=Re{23[v sA (t)+av sB(t)+a
2v sC(t) ] } (2.9)
= 23[v sA (t)-
12v sB(t)-
12v sC(t) ]
v sQ= Im{23[v sA (t)+av sB(t)+a
2v sC(t)] }=13[v sB (t)-v sC(t) ]
(2.10)
그림 2.1의 등가회로부터 고정자의 각 상에 쇄교하는 전 자속
(total flux linkage)을 공간벡터상에서 표현하면 다음과 같다.
Ψ s=23(Ψ sA+aΨ sB+a
2Ψ sC) (2.11)
또한, 각 상에 쇄교되는 자속에 대한 순시값은 다음과 같다.
- 10 -
Ψ sA= Lsi sA+ Msi sB+Msi sC+ Msrcosθ ri ra
+ Msrcos(θ r+2π/3)i rb+ Msrcos(θ r+4π/3)i rc
Ψ sB= Lsi sB+ Msi sA+Msi sC+Msrcos(θ r+4π/3) i ra
+ M srcosθ ri rb+ M srcos(θ r+2π/3)i rc
Ψ sC= Lsi sC+ Msi sB+ Msi sA+Msrcos(θ r+2π/3) i ra
+ M srcos(θ r+4π/3)+ i rb+ M srcosθ ri rc
(2.12)
여기서, L s : 고정자 권선의 자기인덕턴스
Ms : 고정자 권선간의 상호인덕턴스
Msr : 고정자-회전자 상호인덕턴스의 최대값
식 (2.12)을 식 (2.11)에 대입하여 정리하면 다음과 같다.
Ψ s=Lsi s+Lmi rejθ r=Lsi s+Lmir' (2.13)
여기서, Ls= Ls-Ms : 고정자 인덕턴스
Lm=32M sr : 자화 인덕턴스
식 (2.13)에서 i r'은 고정자 좌표계에서 나타낸 회전자 전류를 의
미한다. 고정자 좌표계와 회전자 좌표계 사이의 관계는 다음과 같으
며 이들 사이의 관계를 그림 2.3에 나타내었다.
- 11 -
[ f df q ]= [cos θ r sinθ r- sin θ r cosθ r ][
f Df Q ] (2.14)
여기서, f d,f q : 회전자 좌표계 성분
fD,fQ : 고정자 좌표계 성분
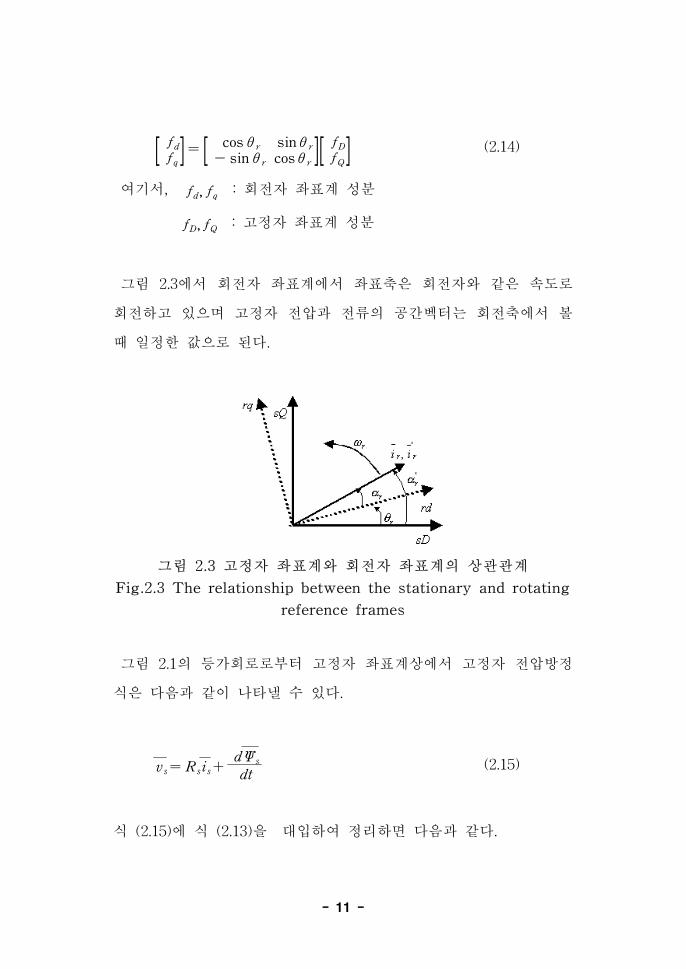
그림 2.3에서 회전자 좌표계에서 좌표축은 회전자와 같은 속도로
회전하고 있으며 고정자 전압과 전류의 공간벡터는 회전축에서 볼
때 일정한 값으로 된다.
그림 2.3 고정자 좌표계와 회전자 좌표계의 상관관계
Fig.2.3 The relationship between the stationary and rotating
reference frames
그림 2.1의 등가회로로부터 고정자 좌표계상에서 고정자 전압방정
식은 다음과 같이 나타낼 수 있다.
v s=Rsi s+dΨ sdt (2.15)
식 (2.15)에 식 (2.13)을 대입하여 정리하면 다음과 같다.

- 12 -
v s=Rsi s+Lsd i sdt+Lm
ddt( i re
jθ r) (2.16)
식 (2.7)로부터 회전자 전류는 일정한 값이므로 식 (2.16)을 다음과
같은 식으로 유도할 수 있다.
v s=Rsi s+Lsd i sdt+ddt(ΨFe
jθ r) (2.17)
여기서,ΨF=Lm i r=Lm I rf
식 (2.17)의 좌변 제3항을 미분하면 다음과 같이 쓸 수 있다.
v s=Rsi s+Lsd i sdt+ jω rΨFe
jθ r (2.18)
식 (2.18)을 고정자 좌표계에서 실수축(D축)과 허수축(Q축) 성분으
로 정리하면 다음과 같다.
v sD= (Rs+pL s)i sD-KEω rsinθ r
v sQ= (Rs+pL s)i sQ+KEω rcosθ r (2.19)
여기서, Rs : 전기자 저항 Ls : 고정자 인덕턴스
KE=Lm I rf : 역기전력 상수
p=ddt : 미분 연산자
- 13 -
또한, 고정자 좌표계와 회전자 좌표계 사이의 상관관계를 이용하여
회전자 좌표계에서 전압방정식을 표현하면 다음과 같다.
v sd=(Rs+pL s)i sd-ω rL si sq
v sq= (Rs+pL s)i rq+ω rL si rd+KEω r (2.20)
식 (2.20)의 전압방정식은 회전자의 구자석으로부터 공급되는 자
속과 같은 방향을 d축 , 이 자속과 수직인 방향을 q축으로 설정하
을때의 식을 나타내고 있다.
PMSM에서 발생되는 기계적인 토오크 TM는 전기자 권선에 쇄교
하는 자속과 직교하는 전기자 전류의 곱으로 표현된다.
TM=P2ΨF[- i sA sinθ r- i sB sin(θ r-2π/3)- i sC sin(θ r+2π/3)]
= P2Ψ F(- i sD sinθ r+ i sQcosθ r)
=P2ΨFi sq
=K t i sq (2.21)
여기서, Kt : 토오크 상수 , P : 극수
이 때의 기계적인 출력 방정식은 다음과 같다.
Jd 2θm
dt2 +D
dθmdt
=TM-Tl (2.22)
- 14 -
여기서, J : 관성 모멘트
D : 점성 마찰계수
Tl : 부하 토오크
앞에서 전동기를 2극이라 가정했으므로 식 (2.22)에서 기계적인
위치 θ m은 전기적인 위치 θ r과 동일하다. 그러므로, 식 (2.19)와 식
(2.22)를 이용하여 고정자 좌표계상에서 구자석 동기전동기의 상
태방정식을 나타내면 다음과 같다.
di sDdt=-
RsL si sD+
KELsω rsinθ r+
1Lsv sD
di sQdt=-
RsL si sQ-
KELsω rcosθ r+
1Lsv sQ
dω rdt=-
DJω r+
1JK ti sq-
1JT l
dθ rdt=ω r (2.23)
- 15 -
제 3 장 순시무효전력을 이용한
센서리스 제어 알고리즘
3.1 전류 관측기의 구성
고정자 좌표계에서 구자석 동기전동기의 전압방정식은 식(3.1)과
같이 나타내어지며,
i sD=- RsL s i sD+KELsω rsinθ r+
1Lsv sD
=-RsL si sD-
1LsE sD+
1Lsv sD
i sQ=-RsL si sQ-
KELsω rcosθ r+
1Lsv sQ
=-RsL si sQ-
1LsE sQ+
1Lsv sQ
(3.1)
여기서, v sD : 고정자 좌표계의 D축 입력전압,
v sQ : 고정자 좌표계의 Q축 입력전압,
i sD : D축전류, i sQ : Q축 전류,
ω r : 회전자의 속도, θ r : 회전자의 위치,
Rs : 고정자 저항, Ls : 고정자 인덕턴스,
EsD=-KEω rsinθ r : D축 역기전력,
E sQ=KEω rcosθ r : Q축 역기전력,
KE : 역기전력 상수
- 16 -
관측기를 식(3.2)와 같이 구성할 경우, 오차방정식은 식(3.4)와 같다.
i sD=- Rs
L si sD+
KEL sω r sinθ r+
1Lsv sD+k 1e sD
=-RsL si sD-
1LsE sD+
1L sv sD+k 1e sD
i sQ=- R s
L si sQ-
KELsω r cosθ r+
1Lsv sQ+k 2e sQ
=-RsL si sQ-
1LsE sQ+
1L sv sQ+k 2e sQ
(3.2)
여기서, i sD : D축 추정전류,
i sQ : Q축 추정전류,
k 1 , k 2 : 상수,
E sD=-KE ω r sinθ r : D축 추정 역기전력,
E sQ=KEω r cosθ r : Q축 추정 역기전력
e sD= i sD- i sDe sQ= i sQ-i sQ
(3.3)
e sD =- RsL s e sD+KELs( ω r sinθ r-ω rsinθ r)+ k 1e sD
e sQ=-R sL se sQ-
KEL s( ω r cosθ r-ω rcosθ r)+k 2e sQ (3.4)
식(3.4)으로부터 역기전력의 오차가 0으로 수렴할 경우, 식(3.2)에서
관측기의 k 1, k 2가 극배치(pole placement)기법을 통해 안정하도록 설
정된다면, 전류오차는 0으로 수렴되어지며, 역기전력 오차를 최소화
시키기 위한 알고리즘은 다음절에 나타냈다.
- 17 -
3.2 순시무효전력을 이용한 추정속도오차 보상
회전자 좌표계에서 구자석 동기전동기의 전압방정식은 식(3.5)
와 같으며, 회전자 속도는 식(3.6)와 같이 산출 가능하다.
v sd= (Rs+ pL s)i sd-ω rL si sq
v sq= (Rs+ pL s)i sq+ω rL si sd+KEω r
(3.5)
여기서, v sd : 회전자 좌표계의 d축 입력전압
v sq : 회전자 좌표계의 q축 입력전압
i sd : 회전자 좌표계의 d축 전류
i sq : 회전자 좌표계의 q축 전류
p : 미분연산자
ω r=v sq-(Rs+pL s)i sqKE+L si sd
(3.6)
식(3.6)으로부터 회전자의 속도를 산출할 경우, 전동기의 파라미터
계측시 발생하는 오차와 선전류 및 입력전압 검출시 발생하는 오차
로 인해 실제속도와 추정속도 사이에 오차가 발생하므로, 이를 보상
하기 위해 보상값 C를 고려하여, 추정속도를 식(3.7)과 같이 구성하
며, 보상값 C를 결정하기 위해 회전자 좌표계의 순시무효전력을 이
용한다.
- 18 -
ω r=v sq-(Rs+pL s)i sqKE+Lsi sd
+C (3.7)
순시 무효전력 q m을 선전류 i s와 역기전력 E s의 벡터외적이라고 정
의하면, 순시무효전력은 식(3.8)과 같으며,
qm≡i s×Es (3.8)
여기서, i s=( i sd, i sq)
Es= (Esd,Esq)
E sd=0 , E sq=KEω r
식(3.2)의 추정전류를 이용한 추정 순시 무효전력은 다음과 같다.
q m≡ i s×Es (3.9)
여기서, i s=( i sd, i sq)
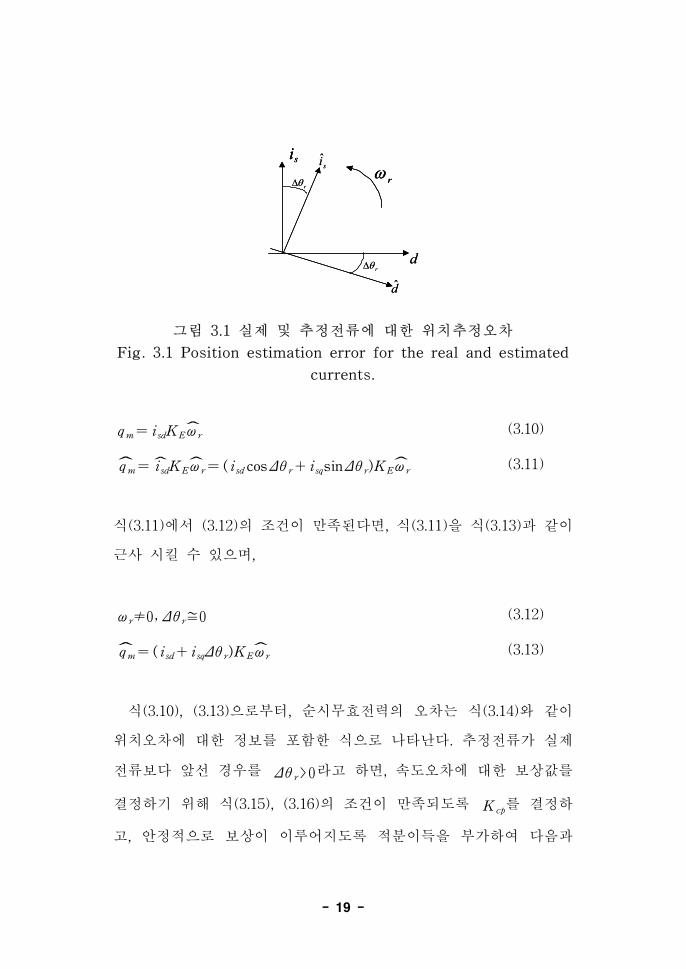
회전자 좌표계에서 실제전류 i s에 대해 추정전류 i s가 그림 3.1과 같
이 실제 순시 무효전력에 대해 Δθ r만큼 벗어나 있다면, 식(3.8),
(3.9)는 식(3.10), (3.11)같이 나타낼 수 있다.
- 19 -
sisi
d
rω
rθ∆
rθ∆
d
sisisi
d
rω rω
rθ∆
rθ∆
d
그림 3.1 실제 및 추정전류에 대한 위치추정오차
Fig. 3.1 Position estimation error for the real and estimated
currents.
qm= i sdKEω r (3.10)
q m= i sdKEω r= ( i sd cosΔθ r+ i sqsinΔθ r)KEω r (3.11)
식(3.11)에서 (3.12)의 조건이 만족된다면, 식(3.11)을 식(3.13)과 같이
근사 시킬 수 있으며,
ω r≠0 , Δθ r≅0 (3.12)
q m= ( i sd+ i sqΔθ r)KEω r (3.13)
식(3.10), (3.13)으로부터, 순시무효전력의 오차는 식(3.14)와 같이
위치오차에 대한 정보를 포함한 식으로 나타난다. 추정전류가 실제
전류보다 앞선 경우를 Δθ r > 0라고 하면, 속도오차에 대한 보상값를
결정하기 위해 식(3.15), (3.16)의 조건이 만족되도록 K cp를 결정하
고, 안정적으로 보상이 이루어지도록 적분이득을 부가하여 다음과
- 20 -
같이 보상값 C를 결정한다.
Δq m= q m- qm= i sqΔθ rKEω r (3.14)
Δθ r > 0이면, Kcp․i sqΔθ rKEω r <0 (3.15)
Δθ r < 0이면, Kcp․i sqΔθ rKEω r >0 (3.16)
C= (Kcp+Kcip)․Δqm (3.17)
여기서, K cp , Kci : 상수
식(3.12)의 조건이 만족되는 경우, 식(3.4)의 오차방정식은 식(3.18)
같이 나타내어지고,
e sD=- Rs
L se sD+
KELs( ω r- ωr) sin θ r+ k 1e sD
e sQ =- RsL s e sQ-KELs( ω r- ωr) cos θ r+k 2e sQ
(3.18)
식(3.17)에서 추정속도를 잘 보상하여, 속도추정오차가 0으로 수렴
하면, 식(3.18)은 식(3.19)로 나타내지며, 안정성을 확보하기 위해 식
(3.20)을 만족하도록, k 1, k 2를 설정하면, 식(3.19)의 오차는 0으로
수렴한다.
- 21 -
e sD =-( RsL s -k 1)e sDe sQ=-(
RsL s-k 2)e sQ (3.19)
k 1 <R sL s, k 2 <
R sL s
(3.20)
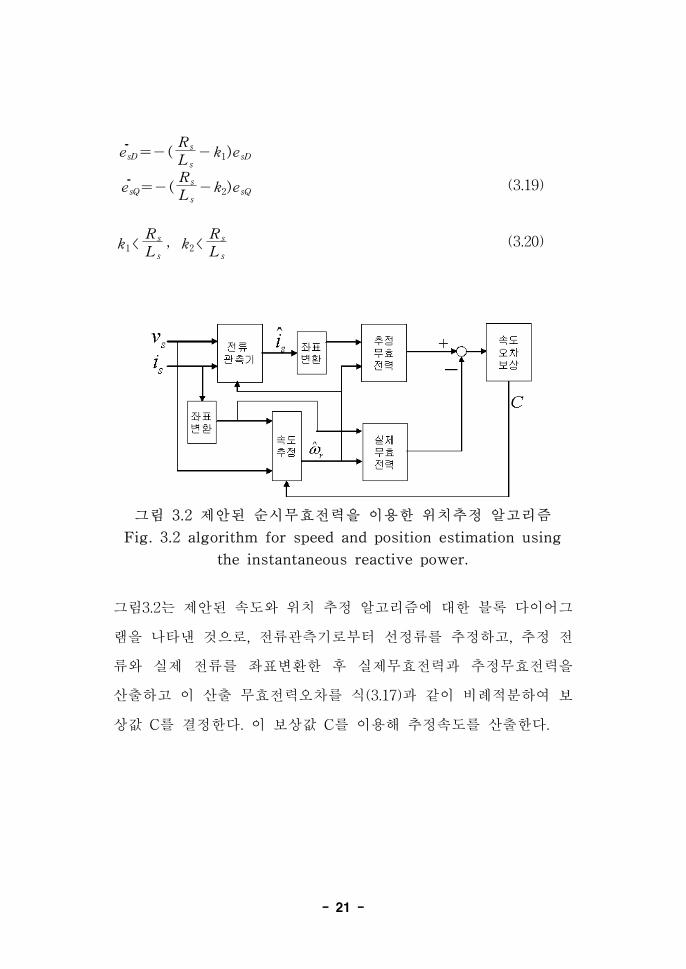
그림 3.2 제안된 순시무효전력을 이용한 위치추정 알고리즘
Fig. 3.2 algorithm for speed and position estimation using
the instantaneous reactive power.
그림3.2는 제안된 속도와 위치 추정 알고리즘에 대한 블록 다이어그
램을 나타낸 것으로, 전류관측기로부터 선정류를 추정하고, 추정 전
류와 실제 전류를 좌표변환한 후 실제무효전력과 추정무효전력을
산출하고 이 산출 무효전력오차를 식(3.17)과 같이 비례적분하여 보
상값 C를 결정한다. 이 보상값 C를 이용해 추정속도를 산출한다.
- 22 -
제 4 장 약계자제어 알고리즘
저속에서 식(3.5)의 속도기전력 항은 작으며, PMSM의 정격전압에
해당하는 DC-link전압은 토크전류를 제어하기에 충분하나 회전자의
속도가 증가할 경우 토크전류를 제어하기 위한 전압의 여유분은 감
소되어진다. 따라서, 약계자 제어 알고리즘을 사용하지 않고 정격
입력전압에 해당하는 회전자 정격속도 이상으로 PMSM을 동작시키
는 것은 불가능하다[10].
인버터가 PMSM에 공급할 수 있는 최대전압 Vsmax는 DC-link
전압에 의해 제한되어지며, 이는 PMSM의 정격전압에 의해 결정되
어진다. 그리고 I smax는 인버터와 PMSM의 정격전류에 의해 결정되
는 값이다. 이러한 경우 PMSM의 전압 및 전류는 다음의 제한 조건
을 만족해야한다.
v2sd+ v
2sq≤V
2smax
(4.1)
i2sd+ i
2sq≤I
2smax
(4.2)
PMSM이 고속에서 운전될 때, 식(3.5)에서 저항에 의한 전압강하
는 속도를 포함한 항에 비해 매우 작으므로 무시될 수 있고, 정상상
태에서 동작한다면, 다음의 식(4.3)과 같이 나타내진다.
v sd=-ω rL si sq
v sq=ω r L si sd+KEω r (4.3)
- 23 -
식(4.1)과 (4.3)으로부터, i sd와 i sq는 다음의 조건을 만족해야 한
다.
(i sd+KELs) 2+ i2sq≤(
Vsmaxω rL s
) 2 (4.4)
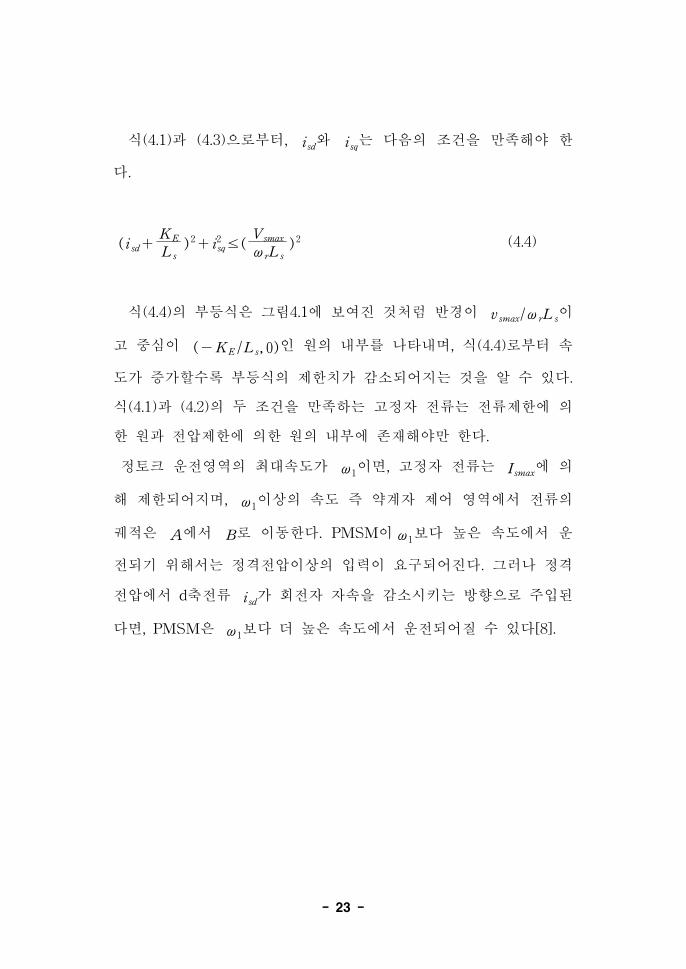
식(4.4)의 부등식은 그림4.1에 보여진 것처럼 반경이 v smax/ω rL s이
고 중심이 (-KE/Ls,0)인 원의 내부를 나타내며, 식(4.4)로부터 속
도가 증가할수록 부등식의 제한치가 감소되어지는 것을 알 수 있다.
식(4.1)과 (4.2)의 두 조건을 만족하는 고정자 전류는 전류제한에 의
한 원과 전압제한에 의한 원의 내부에 존재해야만 한다.
정토크 운전 역의 최대속도가 ω 1이면, 고정자 전류는 I smax에 의
해 제한되어지며, ω 1이상의 속도 즉 약계자 제어 역에서 전류의
궤적은 A에서 B로 이동한다. PMSM이 ω 1보다 높은 속도에서 운
전되기 위해서는 정격전압이상의 입력이 요구되어진다. 그러나 정격
전압에서 d축전류 i sd가 회전자 자속을 감소시키는 방향으로 주입된
다면, PMSM은 ω 1보다 더 높은 속도에서 운전되어질 수 있다[8].
- 24 -
그림 4.1 약계자 제어시 전류 및 전압제한조건에 의한
전류제한 궤적
Fig. 4.1 Voltage and current limit circle of the cylindrical
PMSM in the Field Weakening Region
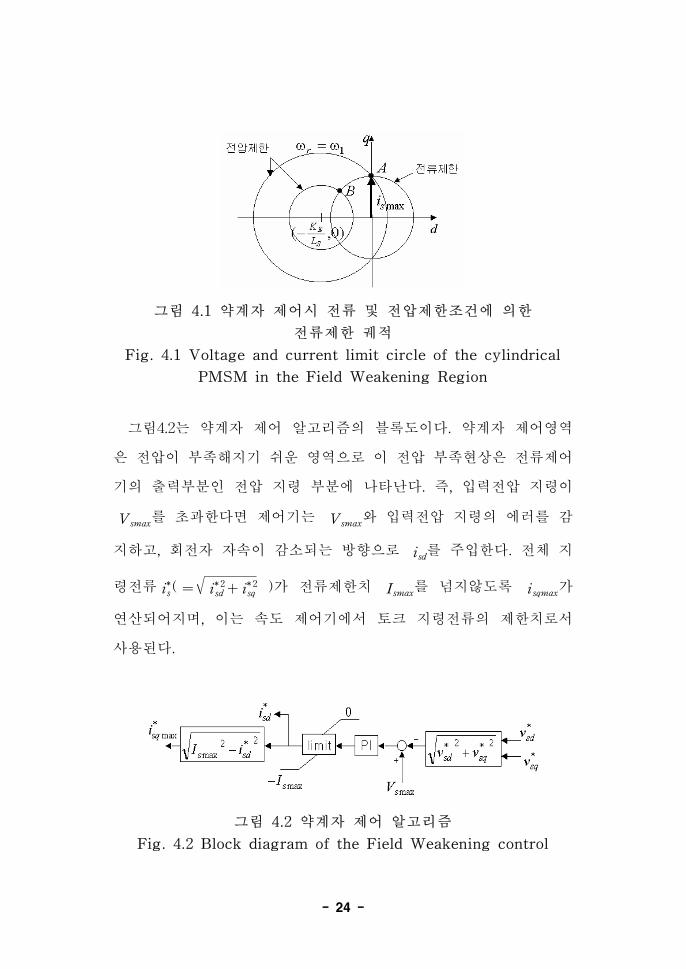
그림4.2는 약계자 제어 알고리즘의 블록도이다. 약계자 제어 역
은 전압이 부족해지기 쉬운 역으로 이 전압 부족현상은 전류제어
기의 출력부분인 전압 지령 부분에 나타난다. 즉, 입력전압 지령이
V smax를 초과한다면 제어기는 Vsmax와 입력전압 지령의 에러를 감
지하고, 회전자 자속이 감소되는 방향으로 i sd를 주입한다. 전체 지
령전류 i*s(= i* 2sd+ i
* 2sq )가 전류제한치 I smax를 넘지않도록 i sqmax가
연산되어지며, 이는 속도 제어기에서 토크 지령전류의 제한치로서
사용된다.
그림 4.2 약계자 제어 알고리즘
Fig. 4.2 Block diagram of the Field Weakening control
- 25 -
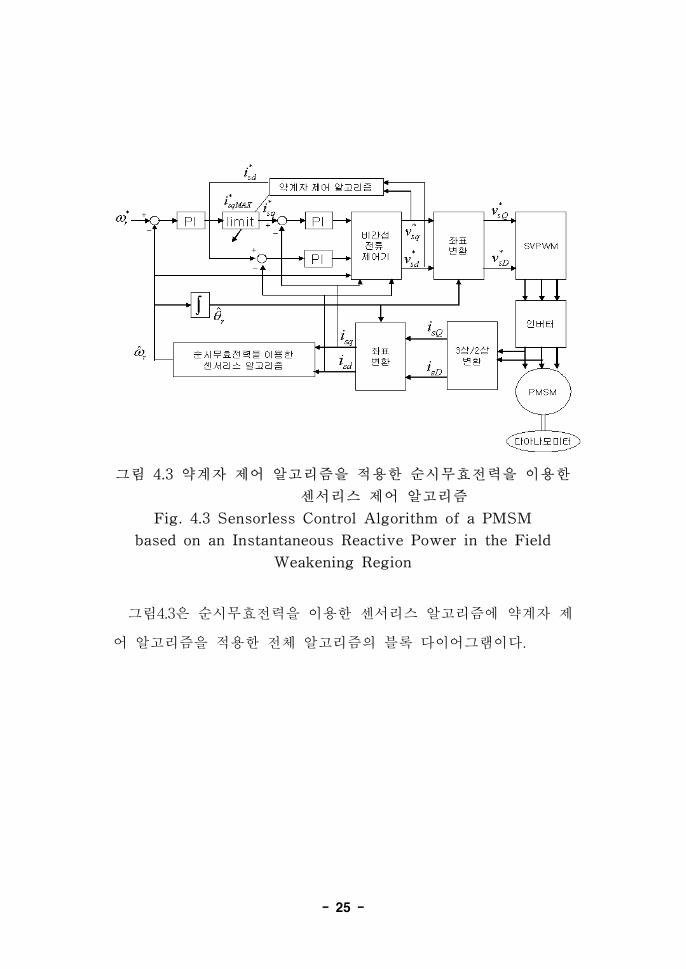
그림 4.3 약계자 제어 알고리즘을 적용한 순시무효전력을 이용한
센서리스 제어 알고리즘
Fig. 4.3 Sensorless Control Algorithm of a PMSM
based on an Instantaneous Reactive Power in the Field
Weakening Region
그림4.3은 순시무효전력을 이용한 센서리스 알고리즘에 약계자 제
어 알고리즘을 적용한 전체 알고리즘의 블록 다이어그램이다.
- 26 -
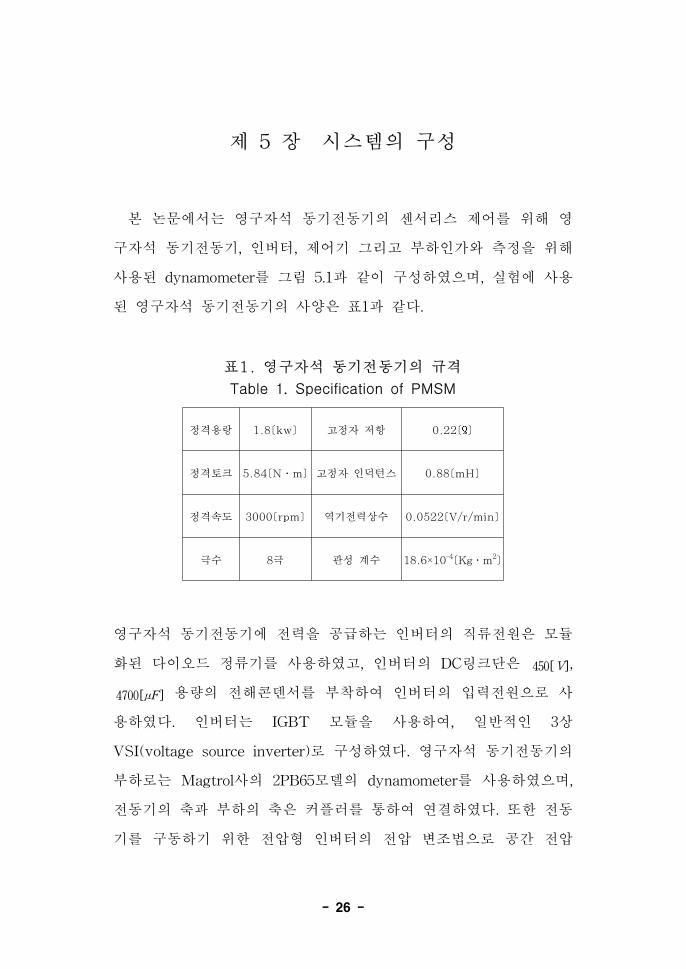
제 5 장 시스템의 구성
본 논문에서는 구자석 동기전동기의 센서리스 제어를 위해
구자석 동기전동기, 인버터, 제어기 그리고 부하인가와 측정을 위해
사용된 dynamometer를 그림 5.1과 같이 구성하 으며, 실험에 사용
된 구자석 동기전동기의 사양은 표1과 같다.
표1. 구자석 동기전동기의 규격
Table 1. Specification of PMSM
정격용랑 1.8[kw] 고정자 저항 0.22[Ω]
정격토크 5.84[N․m] 고정자 인덕턴스 0.88[mH]
정격속도 3000[rpm] 역기전력상수 0.0522[V/r/min]
극수 8극 관성 계수 18.6×10-4[Kg․m2]
구자석 동기전동기에 전력을 공급하는 인버터의 직류전원은 모듈
화된 다이오드 정류기를 사용하 고, 인버터의 DC링크단은 450[V],
4700[μF] 용량의 전해콘덴서를 부착하여 인버터의 입력전원으로 사
용하 다. 인버터는 IGBT 모듈을 사용하여, 일반적인 3상
VSI(voltage source inverter)로 구성하 다. 구자석 동기전동기의
부하로는 Magtrol사의 2PB65모델의 dynamometer를 사용하 으며,
전동기의 축과 부하의 축은 커플러를 통하여 연결하 다. 또한 전동
기를 구동하기 위한 전압형 인버터의 전압 변조법으로 공간 전압
- 27 -
벡터 변조법(Space Vector Modulation)을 사용하 으며, 이를 구현
하기 위한 전용 프로세서로 Analog devices사의 ADMC200을 사용
하 다. 전류제어기로는 비간섭 PI 전류제어기를 사용하 다.
3상 inverter
3상 정류기
3상전 원
PMSM
DSPTMS320C31
AD converter
DA converter
Digital I/O
Gatedriver
Gate신호발생
Dynamometer
Dynamometer Controller
Oscilloscope
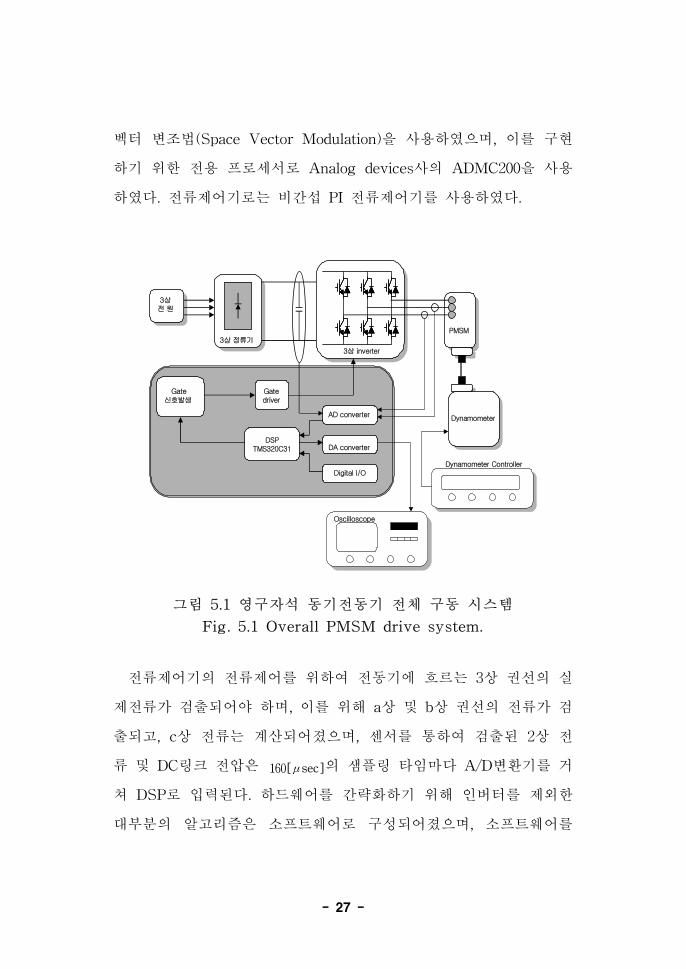
그림 5.1 구자석 동기전동기 전체 구동 시스템
Fig. 5.1 Overall PMSM drive system.
전류제어기의 전류제어를 위하여 전동기에 흐르는 3상 권선의 실
제전류가 검출되어야 하며, 이를 위해 a상 및 b상 권선의 전류가 검
출되고, c상 전류는 계산되어졌으며, 센서를 통하여 검출된 2상 전
류 및 DC링크 전압은 160[μ sec]의 샘플링 타임마다 A/D변환기를 거
쳐 DSP로 입력된다. 하드웨어를 간략화하기 위해 인버터를 제외한
대부분의 알고리즘은 소프트웨어로 구성되어졌으며, 소프트웨어를
- 28 -
구현하기 위한 마이크로프로세서로 DSP를 사용하 다. 제안된 알고
리즘에서 사용된 DSP소자는 고속 고정도 연산이 가능하며, 부동소
수점처리가 가능한 TMS320C31을 사용하 으며, 알고리즘의 성능
및 상태량은 D/A변환기를 거친 후 오실로스코프로 확인하 다.
- 29 -
제 6 장 결과 및 고찰
본 논문에서는 제안된 알고리즘의 타당성을 증명하기 위하여 다
음의 실험을 수행하 다.
먼저 그림6.1∼6.6은 정격속도가 3000[rpm]이고 최대속도가
3500[rpm]인 원통형 구자석 동기전동기의 무부하 실험 파형을 나
타낸다. 그림6.1∼6.3은 3450[rpm]에서 실제속도 및 추정속도, 실제
위치 및 추정위치, 추정속도 및 d축전류를 나타냈으며 속도에 대한
종축의 단위는 2000[rpm/div]이다. 그림 6.2는 정상상태에서의 실제
위치와 추정위치를 나타낸 파형으로 위치 추정이 정확하게 이루어
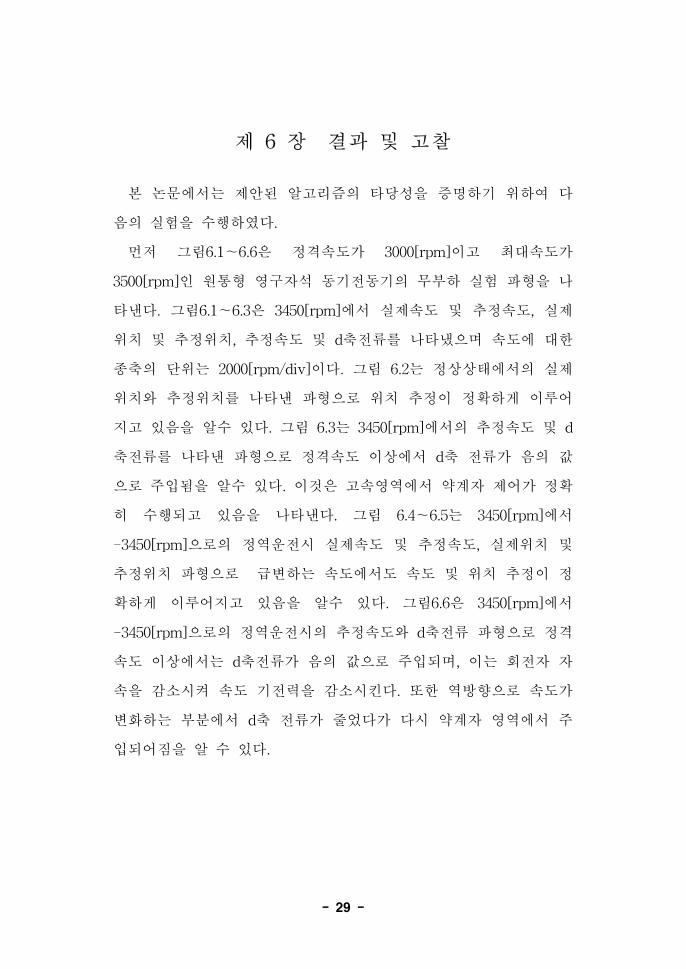
지고 있음을 알수 있다. 그림 6.3는 3450[rpm]에서의 추정속도 및 d
축전류를 나타낸 파형으로 정격속도 이상에서 d축 전류가 음의 값
으로 주입됨을 알수 있다. 이것은 고속 역에서 약계자 제어가 정확
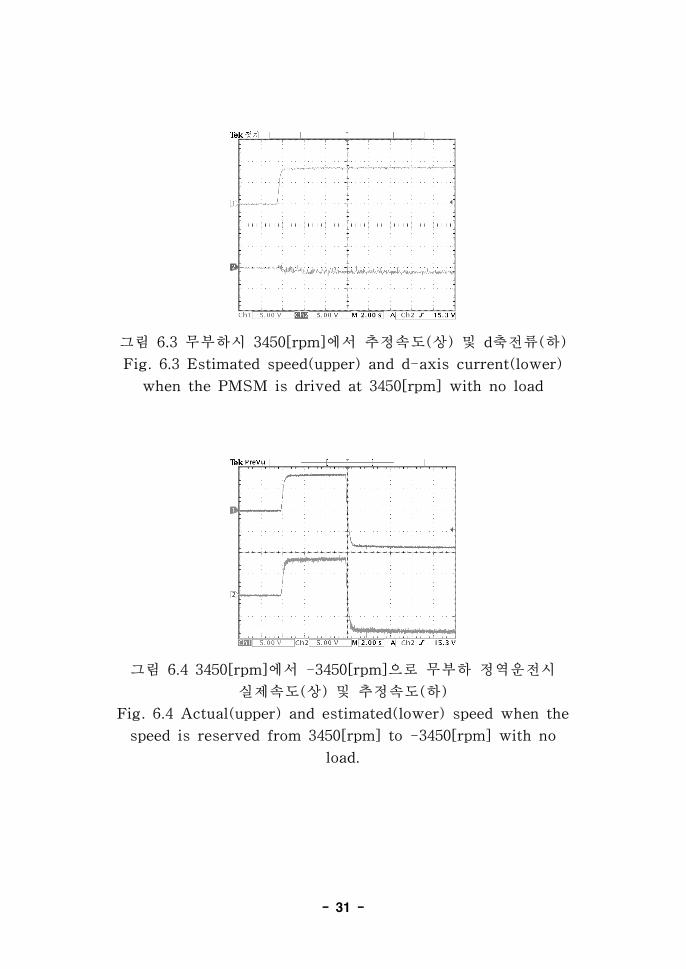
히 수행되고 있음을 나타낸다. 그림 6.4∼6.5는 3450[rpm]에서
-3450[rpm]으로의 정역운전시 실제속도 및 추정속도, 실제위치 및
추정위치 파형으로 급변하는 속도에서도 속도 및 위치 추정이 정
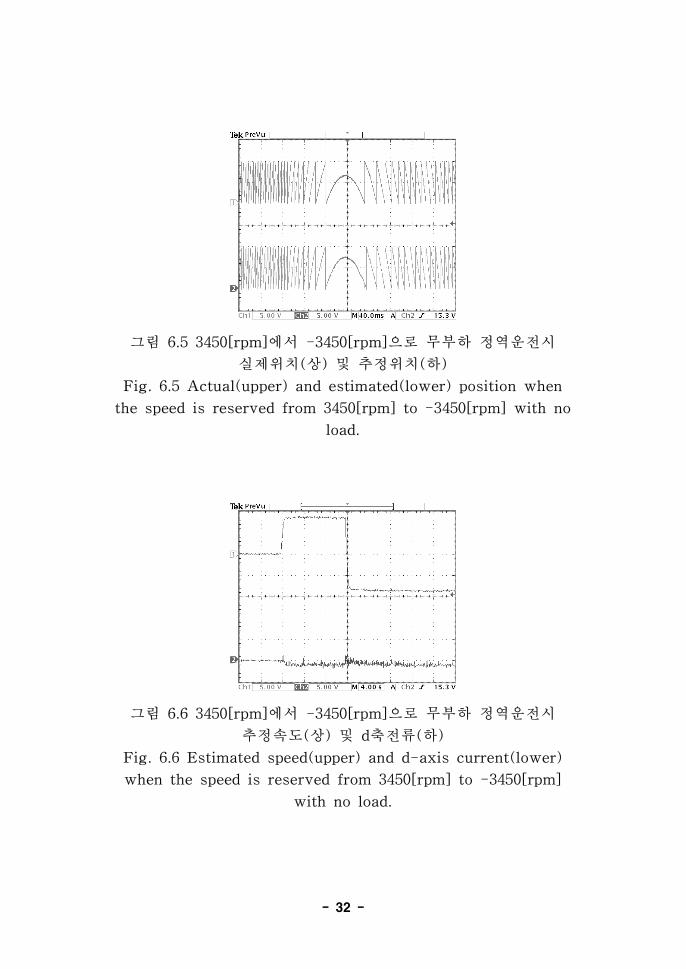
확하게 이루어지고 있음을 알수 있다. 그림6.6은 3450[rpm]에서
-3450[rpm]으로의 정역운전시의 추정속도와 d축전류 파형으로 정격
속도 이상에서는 d축전류가 음의 값으로 주입되며, 이는 회전자 자
속을 감소시켜 속도 기전력을 감소시킨다. 또한 역방향으로 속도가
변화하는 부분에서 d축 전류가 줄었다가 다시 약계자 역에서 주
입되어짐을 알 수 있다.

- 30 -
그림 6.1 무부하시 3450[rpm]에서 실제속도(상) 및 추정속도(하)
Fig. 6.1 Actual(upper) and estimated(lower) speed when the
PMSM is drived at 3450[rpm] with no load
그림 6.2 무부하시 3450[rpm]에서 실제위치(상) 및 추정위치(하)
Fig. 6.2 Actual(upper) and estimated(lower) position when
the PMSM is drived at 3450[rpm] with no load
- 31 -
그림 6.3 무부하시 3450[rpm]에서 추정속도(상) 및 d축전류(하)
Fig. 6.3 Estimated speed(upper) and d-axis current(lower)
when the PMSM is drived at 3450[rpm] with no load
그림 6.4 3450[rpm]에서 -3450[rpm]으로 무부하 정역운전시
실제속도(상) 및 추정속도(하)
Fig. 6.4 Actual(upper) and estimated(lower) speed when the
speed is reserved from 3450[rpm] to -3450[rpm] with no
load.
- 32 -
그림 6.5 3450[rpm]에서 -3450[rpm]으로 무부하 정역운전시
실제위치(상) 및 추정위치(하)
Fig. 6.5 Actual(upper) and estimated(lower) position when
the speed is reserved from 3450[rpm] to -3450[rpm] with no
load.
그림 6.6 3450[rpm]에서 -3450[rpm]으로 무부하 정역운전시
추정속도(상) 및 d축전류(하)
Fig. 6.6 Estimated speed(upper) and d-axis current(lower)
when the speed is reserved from 3450[rpm] to -3450[rpm]
with no load.
- 33 -
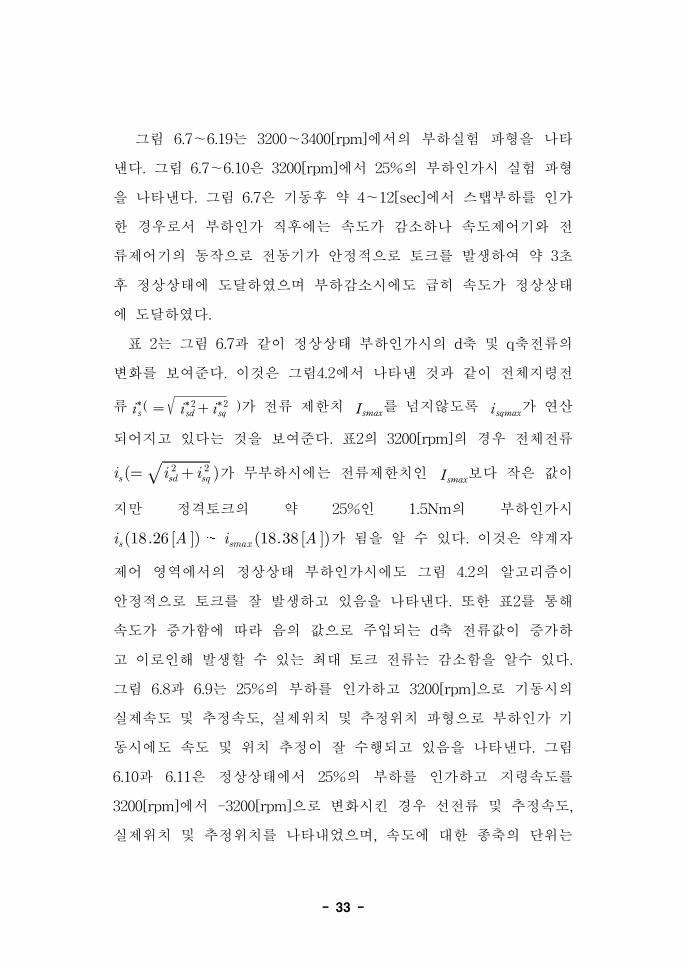
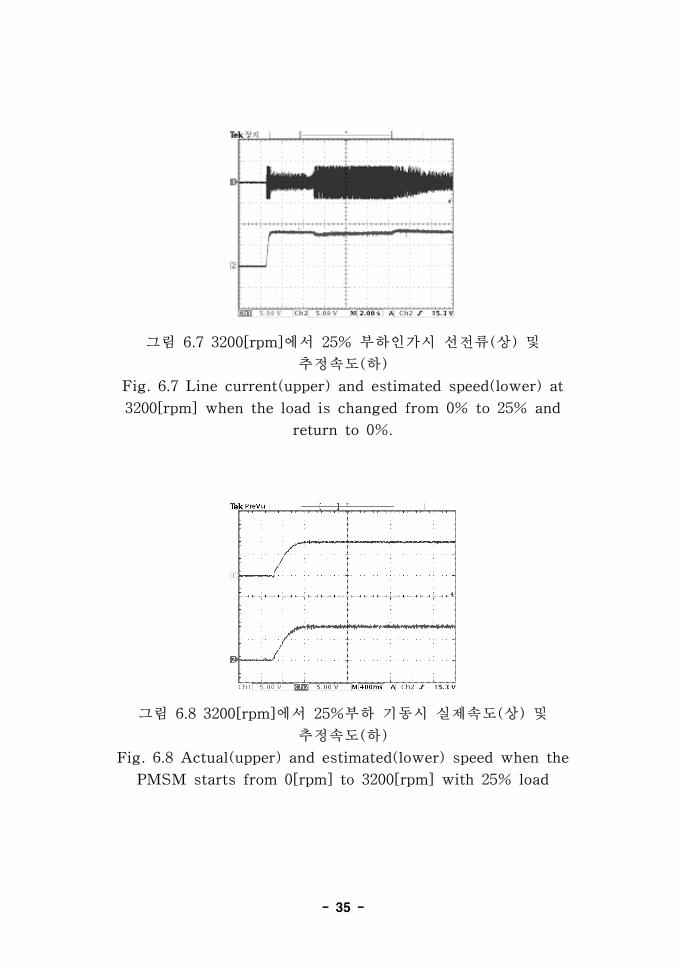
그림 6.7∼6.19는 3200∼3400[rpm]에서의 부하실험 파형을 나타
낸다. 그림 6.7∼6.10은 3200[rpm]에서 25%의 부하인가시 실험 파형
을 나타낸다. 그림 6.7은 기동후 약 4∼12[sec]에서 스탭부하를 인가
한 경우로서 부하인가 직후에는 속도가 감소하나 속도제어기와 전
류제어기의 동작으로 전동기가 안정적으로 토크를 발생하여 약 3초
후 정상상태에 도달하 으며 부하감소시에도 급히 속도가 정상상태
에 도달하 다.
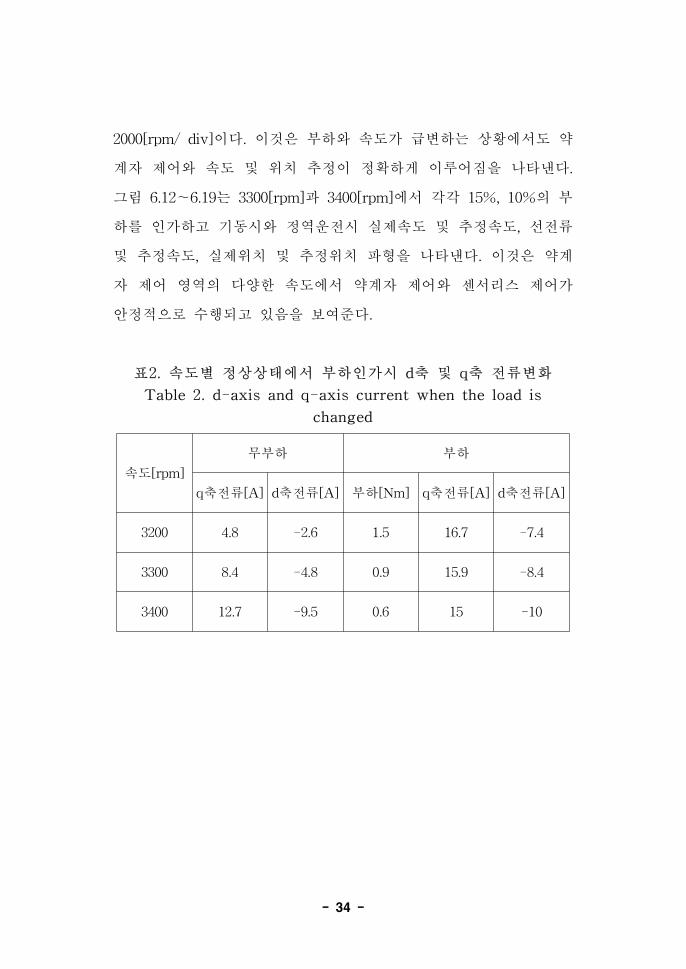
표 2는 그림 6.7과 같이 정상상태 부하인가시의 d축 및 q축전류의
변화를 보여준다. 이것은 그림4.2에서 나타낸 것과 같이 전체지령전
류 i*s(= i* 2sd+ i
* 2sq )가 전류 제한치 I smax를 넘지않도록 i sqmax가 연산
되어지고 있다는 것을 보여준다. 표2의 3200[rpm]의 경우 전체전류
is (=√i 2sd + i
2sq )가 무부하시에는 전류제한치인 I smax보다 작은 값이
지만 정격토크의 약 25%인 1.5Nm의 부하인가시
is (18.26 [A ]) ismax (18.38 [A ])가 됨을 알 수 있다. 이것은 약계자
제어 역에서의 정상상태 부하인가시에도 그림 4.2의 알고리즘이
안정적으로 토크를 잘 발생하고 있음을 나타낸다. 또한 표2를 통해
속도가 증가함에 따라 음의 값으로 주입되는 d축 전류값이 증가하
고 이로인해 발생할 수 있는 최대 토크 전류는 감소함을 알수 있다.
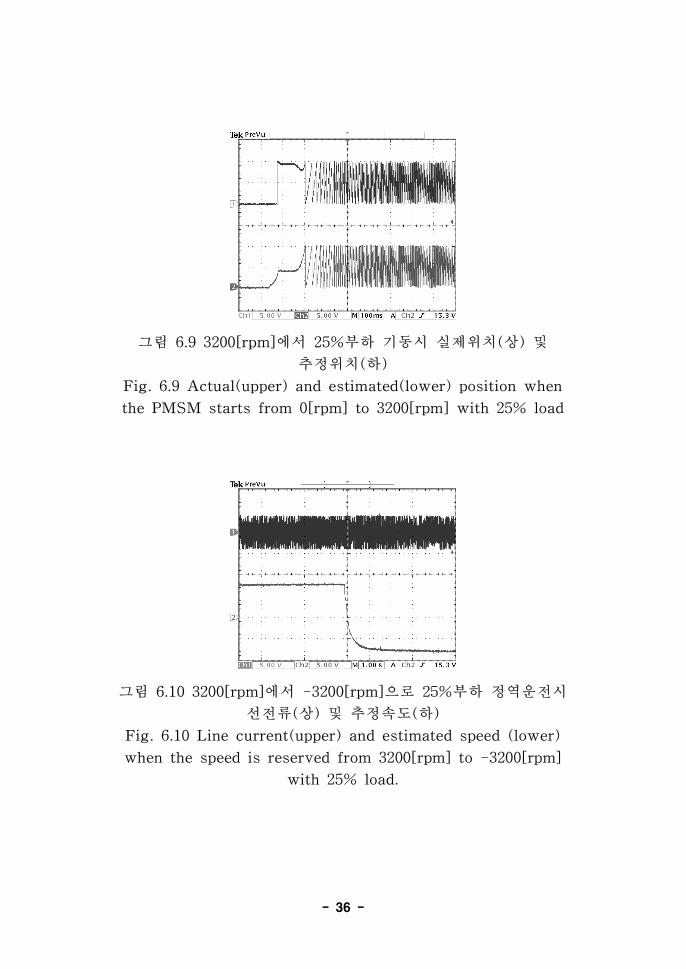
그림 6.8과 6.9는 25%의 부하를 인가하고 3200[rpm]으로 기동시의
실제속도 및 추정속도, 실제위치 및 추정위치 파형으로 부하인가 기
동시에도 속도 및 위치 추정이 잘 수행되고 있음을 나타낸다. 그림
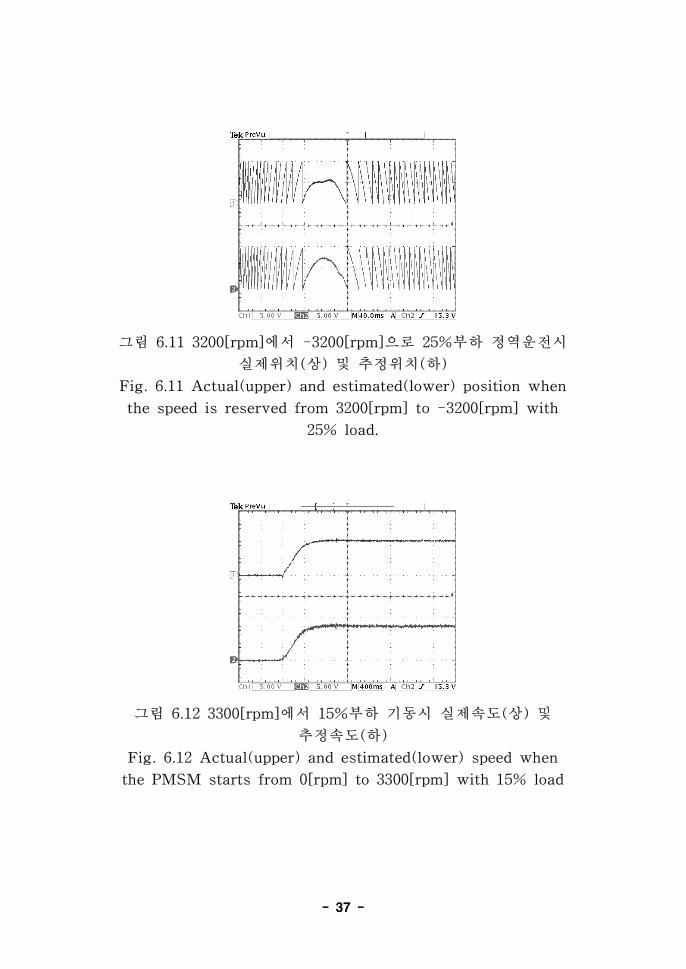
6.10과 6.11은 정상상태에서 25%의 부하를 인가하고 지령속도를
3200[rpm]에서 -3200[rpm]으로 변화시킨 경우 선전류 및 추정속도,
실제위치 및 추정위치를 나타내었으며, 속도에 대한 종축의 단위는
- 34 -
2000[rpm/ div]이다. 이것은 부하와 속도가 급변하는 상황에서도 약
계자 제어와 속도 및 위치 추정이 정확하게 이루어짐을 나타낸다.
그림 6.12∼6.19는 3300[rpm]과 3400[rpm]에서 각각 15%, 10%의 부
하를 인가하고 기동시와 정역운전시 실제속도 및 추정속도, 선전류
및 추정속도, 실제위치 및 추정위치 파형을 나타낸다. 이것은 약계
자 제어 역의 다양한 속도에서 약계자 제어와 센서리스 제어가
안정적으로 수행되고 있음을 보여준다.
표2. 속도별 정상상태에서 부하인가시 d축 및 q축 전류변화
Table 2. d-axis and q-axis current when the load is
changed
속도[rpm]
무부하 부하
q축전류[A] d축전류[A] 부하[Nm] q축전류[A] d축전류[A]
3200 4.8 -2.6 1.5 16.7 -7.4
3300 8.4 -4.8 0.9 15.9 -8.4
3400 12.7 -9.5 0.6 15 -10
- 35 -
그림 6.7 3200[rpm]에서 25% 부하인가시 선전류(상) 및
추정속도(하)
Fig. 6.7 Line current(upper) and estimated speed(lower) at
3200[rpm] when the load is changed from 0% to 25% and
return to 0%.
그림 6.8 3200[rpm]에서 25%부하 기동시 실제속도(상) 및
추정속도(하)
Fig. 6.8 Actual(upper) and estimated(lower) speed when the
PMSM starts from 0[rpm] to 3200[rpm] with 25% load
- 36 -
그림 6.9 3200[rpm]에서 25%부하 기동시 실제위치(상) 및
추정위치(하)
Fig. 6.9 Actual(upper) and estimated(lower) position when
the PMSM starts from 0[rpm] to 3200[rpm] with 25% load
그림 6.10 3200[rpm]에서 -3200[rpm]으로 25%부하 정역운전시
선전류(상) 및 추정속도(하)
Fig. 6.10 Line current(upper) and estimated speed (lower)
when the speed is reserved from 3200[rpm] to -3200[rpm]
with 25% load.
- 37 -
그림 6.11 3200[rpm]에서 -3200[rpm]으로 25%부하 정역운전시
실제위치(상) 및 추정위치(하)
Fig. 6.11 Actual(upper) and estimated(lower) position when
the speed is reserved from 3200[rpm] to -3200[rpm] with
25% load.
그림 6.12 3300[rpm]에서 15%부하 기동시 실제속도(상) 및
추정속도(하)
Fig. 6.12 Actual(upper) and estimated(lower) speed when
the PMSM starts from 0[rpm] to 3300[rpm] with 15% load
- 38 -
그림 6.13 3300[rpm]에서 15%부하 기동시 실제위치(상) 및
추정위치(하)
Fig. 6.13 Actual(upper) and estimated(lower) position when
the PMSM starts from 0[rpm] to 3300[rpm] with 15% load
그림 6.14 3300[rpm]에서 -3300[rpm]으로 15%부하 정역운전시
선전류(상) 및 추정속도(하)
Fig. 6.14 Line current(upper) and estimated speed (lower)
when the speed is reserved from 3300[rpm] to -3300[rpm]
with 15% load.
- 39 -
그림 6.15 3300[rpm]에서 -3300[rpm]으로 15%부하 정역운전시
실제위치(상) 및 추정위치(하)
Fig. 6.15 Actual(upper) and estimated(lower) position when
the speed is reserved from 3300[rpm] to -3300[rpm] with
15% load.
그림 6.16 3400[rpm]에서 10%부하 기동시 실제속도(상) 및
추정속도(하)
Fig. 6.16 Actual(upper) and estimated(lower) speed when
the PMSM starts from 0[rpm] to 3400[rpm] with 10% load
- 40 -
그림 6.17 3400[rpm]에서 10%부하 기동시 실제위치(상) 및
추정위치(하)
Fig. 6.17 Actual(upper) and estimated(lower) position when
the PMSM starts from 0[rpm] to 3300[rpm] with 15% load
그림 6.18 3400[rpm]에서 -3400[rpm]으로 10%부하 정역운전시
선전류(상) 및 추정속도(하)
Fig. 6.18 Line current(upper) and estimated speed (lower)
when the speed is reserved from 3400[rpm] to -3400[rpm]
with 10% load.
- 41 -
그림 6.19 3400[rpm]에서 -3400[rpm]으로 10%부하 정역운전시
실제위치(상) 및 추정위치(하)
Fig. 6.19 Actual(upper) and estimated(lower) position when
the speed is reserved from 3400[rpm] to -3400[rpm] with
10% load.
- 42 -
제 7 장 결 론
본 논문에서는 약계자 제어 알고리즘을 순시무효전력을 이용한
센서리스 알고리즘에 적용하 다. 제안된 알고리즘의 타당성은 실험
을 통하여 증명하 다. 본 논문에서 사용한 약계자 제어 방법은 정
격속도 이상의 속도 역에서는 전압의 부족현상이 발생하고 이 부
족분 전압에 해당하는 직축 전류를 계자 자속의 반대 방향으로 주
입함으로서 횡축 전압에 여유를 확보하는 전압궤환형 제어 방법을
이용하 다. 실험결과 제안된 알고리즘은 약계자 제어 역에서 속
도 및 위치추정이 정확하게 이루어짐을 알 수 있으며, 속도가 급변
하는 과도상태에서도 속도 및 위치 추정이 정확하게 이루어짐을 알
수 있다. 또한 약계자 제어 역에서 속도가 증가함에 따라 음의 방
향으로 d축 전류가 증가하고 이로인해 발생할 수 있는 최대 토크전
류가 감소한다는 것을 확인하 으며 부하인가시에도 제안된 알고리
즘이 강인하게 동작함을 확인하 다.
일반적으로, 관성계수나 점성마찰계수와 같은 운동방정식의 파라
미터들은 측정하기 어려우며, 동작중에도 미묘하게 변할 수 있으므
로, 운동방정식을 사용하는 위치 및 속도 추정알고리즘은 실제구현
에 제한을 받는다. 본 논문에서 사용한 센서리스 제어 알고리즘은
전동기의 전압방정식과 순시무효전력만을 사용하여 전동기의 기계
적인 제정수에 강인한 특성을 갖는다. 또한 약계자 제어 알고리즘도
전압의 부족 현상을 이용하여 계자 전류의 지령치를 만들기 때문에
파라미터의 변화에 향을 받지 않는다.
- 43 -
참 고 문 헌
[1]R. Wu, G.R. Selmon, “A Permanent magnet motor drive
without a shaft sensor", IEEE Trans. Ind. Appl., vol.27, no.5, pp
1005-1011, 1991.
[2]N. Matsui, M. Shigyo , "Brushless DC motor control without
position and speed sensors", IEEE Trans, Ind. Appl., vol.28, no.1,
pp.120-127, 1992.
[3]Jun Hu, Dongqi Zhu, YongDong Li, Jingde Gao, "Application of
sliding observer to sensorless permanent magnet synchronous
motor drive system", IEEE PESC Conf. Record. pp 532-536, 1994.
[4]T. Furuhshi, S. sangwongwanich, S. Okuma "A
position-and-velocity sensorless control for Brushless DC motors
using an adaptive sliding mode observer", IEEE Trans. Industrial
Electronics, vol.39, no.2, pp.89-95, 1992.
[5]Jong-Hwan Song, Seung-Ki Sul, "Torque maximizing control
of permanent magnet synchronous motor under voltage and
current limitations of PWM inverter"IEEE-APEC'96. Conference ,
Vol 2 , pp.758-763, 1996.
[6]Shigeo Morimoto, Yoji Taketa and Takao Hirasa, "Flux
weakening control method for surface permanent magnet
synchronous motors", IPEC-TOKYO, pp.942-949, 1990.
[7]Sudhoff, S.D., Corzine, K.A.; Hegner, H.J., "A flux-weakening
strategy for current-regulated surface-mounted permanent-
magnet machine drives", IEEE Trans, Volume 10, pp.431-437,
- 44 -
Sept. 1995.
[8]Jong-hwan Song, Jang-mok Kim and Seung-ki Sul. "A new
robust SPMSM control to Parameter Varations in flux weakening
region", IECON'96, vol 2, pp1193-1198, 1996.
[9]최양광, 김 석, 한윤석, “순시무효전력을 이용한 구자석동기전
동기의 새로운 센서리스제어”, 대한전기학회논문지, 53B, pp.247-254
2004.
[10]T -H. Liu and C. -H. Liu, "A multiprocessor fully digital
control architecture for permanent magnet synchronous motor
drives", IEEE Trans. on Mag. Vol.5, pp.413-423, 1990.





![>Þà ÕÀ ÌÕÀi >L À >Þ-> i · *Àià `i½Ã >Þ-> i v ® ® ! v Ð ! >Þà ÕÀ ÌÕÀi ÕÀ ÌÕÀi >L À >Þ-> i £ÓÇÇ-° } > ` Ûi°] i>ÀÜ>ÌiÀ ÇÓÇ {{È Ç Îx](https://static.documents.pub/doc/80x56/5c0874ac09d3f2603b8c207c/ba-oa-ioai-l-a-b-i-aia-ia-b-i-v-v-d-ba.jpg)



![1% 3 à Ñ ûØ S Prepository.krei.re.kr/bitstream/2018.oak/14750/1/PDA를...D P 8 ~ x 5 ý ³ w : » 5 a Ý S À ² ü q Ê y Þ Ñ × Þ Ý ¸ 3 y Þ × û ³ À Ò ] î n Ä ²](https://static.documents.pub/doc/80x56/5e909a4a86b23c5f5964437f/1-3-s-d-p-8-x-5-w-5-a-s-q-y-.jpg)
![ò¿( · 2020. 6. 4. · w X Àa ß×r Y q q s D>Þ d À Þ È] ò ¿( _ 159 î . I À ò > D d 7 û À ² ; î . ; H r-û S î s D Ý Þ 7 À n Ä ä x 5 ý a a Ý ( à î . (6)](https://static.documents.pub/doc/80x56/60ba60c295a98d76d91d445c/-2020-6-4-w-x-a-r-y-q-q-s-d-d-159-.jpg)


![Næ , 5 ] æ ! 7C>Ì · 7C/² 7îh "' ¥ h\ >Ù [ #m >Ù >Ù >Þ >Ý'¼N >Ý>Ô& F"@] *L>Õ >ß>Ú>Ü >Þ>Ü>Þ>Ü>Ú>Ý>Ú>Þ>ã >à >Þ'¼N >Þ>Ô'ö#."@] *L>Õ >ß>Ú>Ü >Þ>Ü>Þ>Ü>Ú](https://static.documents.pub/doc/80x56/5f6f7343f4a514047967a890/n-5-7coe-7c-7h-h-m-.jpg)



![expectations!” YOUNG MINDSexpectations!” À ÀÃÌÞ s > Þ s ÀÌ >Þ] " Ì>À 75 WITH YOUNG PATIENTS 233 D N ” À> Ã Ì > ÕÌ s -i«Ì «>Ì i ÌÓä£Ç® PATIENT SATISFACTION](https://static.documents.pub/doc/80x56/5f487245f5616a79da6425fe/expectationsa-young-minds-expectationsa-foe-s-s-oe-.jpg)