Given the rule IF the tap is open THEN water flows and the fact the tap
is open, the derived fact water flows can be generated. The new fact is
stored in computer memory and can be used to satisfy the conditions of other
rules, thereby leading to further derived facts. The collection of facts which are
known to the system at any given time is called the fact base.Rule-writing is a type of declarative programming (see Section 1.6),
because rules represent knowledge that can be used by the computer, without
specifying how and when to apply that knowledge. The ordering of rules in a
program should ideally be unimportant, and it should be possible to add new
rules or modify existing ones without fear of side effects. We will see by
reference to some simple examples that these ideals cannot always be taken for
granted.
For the declared rules and facts to be useful, an inference engine for
interpreting and applying them is required (see Section 1.5). Inference enginesare incorporated into a range of software tools, discussed in Chapter 10, that
includes expert system shells, artificial intelligence toolkits, software libraries,
and the Prolog language.
2.2 A rule-based system for boiler control
Whereas the above discussion describes rule-based systems in an abstract
fashion, a physical example is introduced in this section. We will consider arule-based system to monitor the state of a power station boiler and to advise
appropriate actions. The boiler in our example (Figure 2.1) is used to produce
steam to drive a turbine and generator. Water is heated in the boiler tubes to
produce a steam and water mixture that rises to the steam drum, which is a
cylindrical vessel mounted horizontally near the top of the boiler. The purpose
of the drum is to separate the steam from the water. Steam is taken from the
drum, passed through the superheater and applied to the turbine that turns the
generator. Sensors are fitted to the drum in order to monitor:
• the temperature of the steam in the drum;
• the voltage output from a transducer, which in turn monitors the level of
water in the drum;
• the status of pressure release valve (i.e., open or closed);
• the rate of flow of water through the control valve.
The following rules have been written for controlling the boiler:
/* Rule 2.9 */IF release valve open AND flow rate high
THEN steam escaping
/* Rule 2.10 */
IF flow rate low THEN control valve closed
The conclusions of three of the above rules (2.1, 2.2, and 2.3) consist of
recommendations to the boiler operators. In a fully automated system, such
rules would be able to perform their recommended actions rather than simply
making a recommendation. The remaining rules all involve taking a low-levelfact, such as a transducer reading, and deriving a higher-level fact, such as the
quantity of water in the drum. The input data to the system (sensor readings in
our example) are low-level facts; higher-level facts are facts derived from
them.
Most of the rules in our rule base are specific to one particular boiler
arrangement and would not apply to other situations. These rules could be
described as shallow, because they represent shallow knowledge. On the other
hand, Rule 2.7 expresses a fundamental rule of physics, namely that the boiling
temperature of a liquid increases with increasing applied pressure. This is validunder any circumstances and is not specific to the boiler shown in Figure 2.1.
It is an example of a deep rule expressing deep knowledge.
The distinction between deep and shallow rules should not be confused
with the distinction between high-level and low-level rules. Low-level rules are
those that depend on low-level facts. Rule 2.8 is a low-level rule since it is
dependent on a transducer reading. High-level rules make use of more abstract
information, such as Rule 2.3 which relates the occurrence of a steam outlet
blockage to a recommendation to replace a pipe. Higher-level rules are those
which are closest to providing a solution to a problem, while lower-level rulesrepresent the first stages toward reaching a conclusion.
2.3 Rule examination and rule firing
In Section 2.2, a rule base for boiler control was described without mention of
how the rules would be applied. The task of interpreting and applying the rules
pressure. Rule 2.4, however, is less sensible. The fact release valve stuck
is not in itself sufficient evidence to deduce that the steam outlet is blocked.
The other necessary evidence is that the pressure in the drum must be high.
The reason that the rule base works in its current form is that in order for the
system to believe the release valve to be stuck, the pressure must be high.
Although the rule base works, it is not robust and is not tolerant of new
knowledge being added. Consider, for instance, the effect of adding the
following rule:
/* Rule 2.11 */
IF pressure low AND release valve open THEN release valve stuck
This rule is in itself sensible. However, the addition of the rule has an
unwanted effect on Rule 2.4. Because of the unintended interaction between
Rules 2.4 and 2.11, low pressure in the drum and the observation that the
release valve is open result in the erroneous conclusion that the steam outlet is blocked. Problems of this sort can be avoided by making each rule an accurate
statement in its own right. Thus in our example, Rule 2.4 should be written as:
/* Rule 2.4a */
IF pressure high AND release valve stuck
THEN steam outlet blocked
A typical rule firing order, given that the drum pressure is high and the release
Multiple instantiation is a breadth-first approach to problem solving and single
instantiation is a depth-first approach, as illustrated in Figure 2.4. The practical
implications of the two approaches are discussed in Chapters 11 and 14.
2.7.2 Rete algorithm
The scheme for forward-chaining shown in Figure 2.2 contains at least one
source of inefficiency. Once a rule has been selected from the conflict set and
fired, the conflict set is thrown away and the process starts all over again. This
is because firing a rule alters the fact base, so that a different set of rules may
qualify for the conflict set. A new conflict set is therefore drawn up by re-
examining the condition parts of all the available rules. In most applications,
the firing of a single rule makes only slight changes to the fact base and henceto the membership of the conflict set. Therefore, a more efficient approach
would be to examine only those rules whose condition is affected by changes
made to the fact base on the previous cycle. The Rete (pronounced “ree-tee”)
algorithm [1, 2] is one way of achieving this.
The principle of the Rete algorithm can be shown by a simple example,
using the following rule:
/* Rule 2.22*/
IF ?p is a pipe of bore ?b AND ?v is a valve of bore ?b
THEN ?p and ?v are compatible
Prior to running the system, the condition parts of all the rules are assembled
into a Rete network , where each node represents an atomic condition, i.e., one
that contains a simple test. There are two types of nodes — alpha nodes can be
satisfied by a single fact, whereas beta nodes can only be satisfied by a pair of
facts. The condition part of Rule 2.22 would be broken down into two alpha
nodes and one beta node:
1: find a pipe2: find a valve
1: the bore of each must be equal
The Rete network for this example is shown in Figure 2.5. Suppose that,
As noted above, conflict resolution is the method of choosing one rule to fire
from those that are able to fire, i.e., from the set of triggered rules, known as
the conflict set. In Figure 2.2, the complete conflict set is found beforechoosing a rule to fire. Since only one rule from the conflict set can actually
fire on a given cycle, the time spent evaluating the condition parts of the other
rules is wasted unless the result is saved by using a Rete algorithm or similar
technique. A strategy which overcomes this inefficiency is to fire immediately
the first rule to be found that qualifies for the conflict set (Figure 2.6). In this
scheme, the conflict set is not assembled at all, and the order in which rules are
selected for examination determines the resolution of conflict. The order of
rule examination is often simply the order in which the rules appear in the rule
base. If the rule-writer is aware of this, the rules can be ordered in accordancewith their perceived priority.
2.8.2 Priority values
Rather than relying on rule ordering as a means of determining rule priorities,
rules can be written so that each has an explicitly stated priority value. Where
more than one rule is able to fire, the one chosen is the one having the highest
priority. The two rules below would be available for firing if the water level
had been found to be low (i.e., Rule 2.8 had fired) and if the temperature werehigh:
/* Rule 2.1a */
IF water level low THEN open control valve PRIORITY 4.0
/* Rule 2.2a */
IF temperature high and water level low THEN
open control valve AND shut down boiler tubes PRIORITY 9.0
In the scheme shown here, Rule 2.2a would be selected for firing as it has the
higher priority value. This scheme arbitrarily uses a scale of priorities from 1
to 10.
As the examination of rules that are not fired represents wasted effort, an
efficient use of priorities would be to select rules for examination in order of
their priority. Once a rule has been found which is fireable, it could be fired
immediately. This scheme is identical to the “first come, first served” strategy
(Figure 2.6), except that rules are selected for examination according to their
priority value rather than their position in the rule base.
If Rules 2.1 and 2.2 are both in the conflict set, Metarule 2.23 will be fired,
with the result that Rule 2.2 is then fired. If a conflict arises for which no
metarule can be applied, then a default method such as “first come, first
served” can be used.
2.9 Backward-chaining (a goal-driven strategy)
2.9.1 The backward-chaining mechanism
Backward-chaining is an inference strategy that assumes the existence of a
goal that needs to be established or refuted. In the boiler control example, our
goal might be to establish whether it is appropriate to replace the outlet pipe,
and we may not be interested in any other deductions that the system is capable
of making. Backward-chaining provides the means for achieving this. Initially,
only those rules that can lead directly to the fulfillment of the goal are selectedfor examination. In our case, the only rule that can achieve the goal is Rule 2.3,
since it is the only rule whose conclusion is replace outlet pipe. The
condition part of Rule 2.3 is examined but, since there is no information about
a steam outlet blockage in the fact base, Rule 2.3 cannot be fired yet. A new
goal is then produced, namely steam outlet blocked, corresponding to the
condition part of Rule 2.3. Two rules, 2.4 and 2.6, are capable of fulfilling this
goal and are therefore antecedents of Rule 2.3. What happens next depends on
whether a depth-first or breadth-first search strategy is used. These two
methods for exploring a search tree were introduced in Chapter 1, but now the
nodes of the search tree are rules.
For the moment we will assume the use of a depth-first search strategy, as
this is normally adopted. The use of a breadth-first search is discussed in
Section 2.9.3. One of the two relevant rules (2.4 or 2.6) is selected for
examination. Let us suppose that Rule 2.6 is chosen. Rule 2.6 can fire only if
steam is escaping from the drum. This information is not in the fact base, so
steam escaping becomes the new goal. The system searches the rule base for
a rule which can satisfy this goal. Rule 2.9 can satisfy the goal, if its conditionis met. The condition part of Rule 2.9 relies only on the status of the release
valve. If the valve were found to be open, then 2.9 would be able to fire, the
goal steam escaping could be satisfied, Rule 2.6 would be fireable and the
original goal thus fulfilled.
8/20/2019 0456_PDF_02
http://slidepdf.com/reader/full/0456pdf02 19/29
Let us suppose, on the other hand, that the release valve is found to be
closed. Rule 2.9 therefore fails, with the result that Rule 2.6 also fails. The
system backtracks to the last place where a choice between possible rules was
made and will try an alternative, as shown in Figure 2.7. In the example shown
here, this means that Rule 2.4 is examined next. It can fire only if the release
valve is stuck but, because this information is not yet known, it becomes the
new goal. This process continues until a goal is satisfied by the information in
the fact base. When this happens, the original goal is fulfilled, and the chosen
path through the rules is the solution. If all possible ways of achieving the
overall goal have been explored and failed, then the overall goal fails.
The backward-chaining mechanism described so far has assumed a depth-
first search for rules. This means that whenever a choice between rules exists,
just one is selected, the others being examined only if backtracking occurs.
The inference mechanism built into the Prolog language (see Chapter 10)
is a depth-first backward-chainer, like that described here. There are two sets
of circumstances under which backtracking takes place:
Rule 2.3
Rule 2.4
Rule 2.5
Rule 2.7
Goal: replace
outlet pipe
search
Failure
Rule 2.6
Rule 2.9
search
Success
backtrack
Figure 2.7 Backward-chaining applied to the boiler control rules:
the search for rules proceeds in a depth-first manner
(i) when a goal cannot be satisfied by the set of rules currently under
consideration; or
(ii) when a goal has been satisfied and the user wants to investigate other
ways of achieving the goal (i.e., to find other solutions).
2.9.2 Implementation of backward-chaining Figure 2.8 shows a generalized flowchart for backward-chaining from a goal
G1. In order to simplify the chart, it has been assumed that each rule has only
one condition, so that the satisfaction of a condition can be represented as a
single goal. In general, rules have more than one condition. The flowchart in
Figure 2.8 is an attempt to represent backward-chaining as an iterative process.
This is difficult to achieve, as the length of the chain of rules cannot be
predetermined. The flowchart has, of necessity, been left incomplete. The
flowchart contains repeating sections that are identical except for the variable
names, an indication that while it is difficult to represent the processiteratively, it can be elegantly represented recursively. A recursive definition of
a function is one that includes the function itself. Recursion is an important
aspect of the artificial intelligence languages Lisp and Prolog, discussed in
Chapter 10, as well as many other computer languages. Box 2.1 shows a
recursive definition of backward-chaining, where it has again been assumed
that rules have only one condition. It is not always necessary to write such a
function for yourself as backward-chaining forms an integral part of the Prolog
language and most expert system shells and artificial intelligence toolkits (see
Chapter 10).
2.9.3 Variations of backward-chaining
There are a number of possible variations to the idea of backward-chaining.
Some of these are:
(i) depth-first or breadth-first search for rules;
(ii) whether or not to pursue other solutions (i.e., other means of achieving the
goal) once a solution has been found;(iii) different ways of choosing between branches to explore (depth-first search
only);
(iv) deciding upon the order in which to examine rules (breadth-first search
only);
(v) having found a succession of enabling rules whose lowest-level conditions
are satisfied, whether to fire the sequence of rules or simply to conclude
Finally, it should be noted that in some backward-chaining systems the
rule syntax is reversed, compared with the examples that we have discussed so
far. A possible syntax would be:
DEDUCE <conclusion> IF <condition>
The placing of the conclusion before the condition reflects the fact that in backward-chaining systems it is the conclusion part of a rule that is assessed
first, and only if the conclusion is relevant is the condition examined.
2.10 A hybrid strategy
A system called ARBS (Algorithmic and Rule-based Blackboard System),
described in Chapters 11 and 14, makes use of an inference engine that can be
thought of as part forward-chaining and part backward-chaining [4].Conventional backward-chaining involves initial examination of a rule that
achieves the goal. If that cannot fire, its antecedent rules are recursively
examined, until rules can be fired and progress made toward the goal. In all
problems involving data interpretation (such as the boiler control example), the
high-level rules concerning the goal itself can never fire until lower-level rules
for data manipulation have been fired. The standard mechanisms for forward-
or backward-chaining, therefore, involve a great deal of redundant rule
examination. The hybrid strategy is a means of eliminating this source of
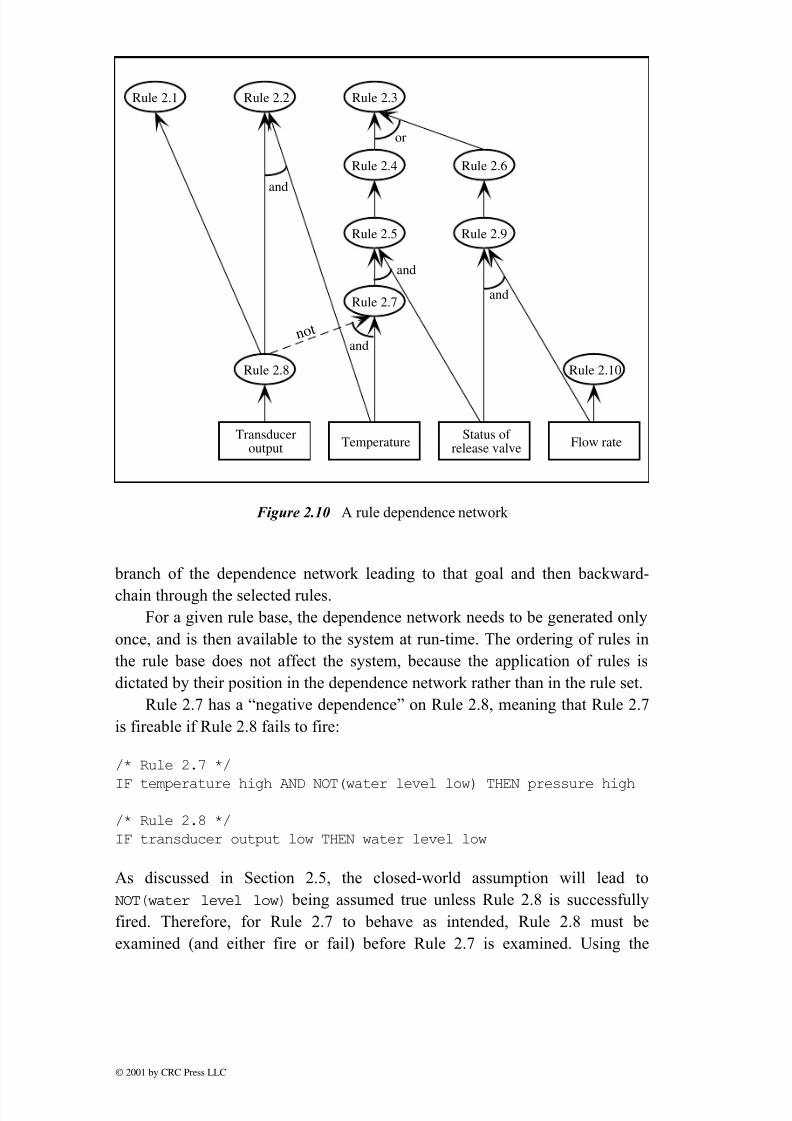
inefficiency.Under the hybrid strategy, a rule dependence network is built prior to
running the system. For each rule, the network shows which other rules may
enable it, i.e., its antecedents, and which rules it may enable, i.e., its
dependents. The rule dependencies for the boiler control knowledge base are
shown in Figure 2.10. In its data-driven mode, known as directed forward-
chaining , the hybrid strategy achieves improved efficiency by using the
dependence network to select rules for examination. Low-level rules
concerning the sensor data are initially selected for examination. As shown in
Figure 2.10, only Rules 2.8, 2.9, and 2.10 need be examined initially. Thenhigher-level rules, leading toward a solution, are selected depending on which
rules have actually fired. So, if Rules 2.8 and 2.9 fire successfully, the new set
of rules to be examined becomes 2.1, 2.2, and 2.6. The technique is an
effective way of carrying out the instruction marked “select rules to examine”
in the flowchart for forward-chaining (Figure 2.2).
The same mechanism can easily be adapted to provide an efficient goal-
driven strategy. Given a particular goal, the control mechanism can select the