23
1 Autonomous Foraging in a Simulated Environment
| Date post: | 27-Dec-2015 |
| Category: |
Documents |
| Upload: | grant-horton |
| View: | 226 times |
| Download: | 0 times |

1
Autonomous Foragingin a Simulated Environment

2
Introduction Autonomous foraging: the scenario
Robots from the Matrix, harvesting humans and avoiding mannequins
Multiple robots, laying pheromones to maximize harvesting efficiency
Dark post-industrial environment

3
Hybrid Architecture Mostly reactive
No internal map React immediately to sensor data Poses challenges for efficiency Difficult to fix minima
Partially deliberative Track relative offset from goal Some ordering exists Allows for some degree of predictability

4
Behavior Networkmain network
init forageloop*
* loops until all rewards found and delivered
forage
findobject
returnto goal
loop*
* loops until all rewards found and delivered

5
Behavior Network
avoidobstacle
wanderdetectreward
grabobject
find object
concurrent
triggers

6
Module Summary

7
Sensor Goals Link specific sensors to specific goals
Obstacle distance/detection Potential field measurement Object discrimination
Enable specific rules for architecture Sensors must facilitate reactive behavior

8
Sensors Laser range finder
Avoid obstacles in advance (less moves) Limited range due to fog, smog, and “gloom”
Thermal sensor Detect heat emitted by humans Inverse Euclidean distance from object center used
as gradient 2 color sensors
One for humans, one for mannequins Both are semi-active for goal (where all other
humans are stored)

9
Sensor Models Laser range finder (front)
Returns distance (integer) Assume accuracy for distances of 1 to 6
squares Used for obstacle detection
Thermal sensor (front) Returns 3 x 3 matrix (floating point) Assume 10% error per grid Used for object detection
2 color sensors (bottom) Returns wavelength intensity (floating point) Assume 2% error Used for object detection/discrimination

10
Reactive Components• sensor_read;• thermalsum = sum( sum( robot.thermal ) );• • % detect_reward • if robot.green >= 0.8 & robot.carrying == TYPE_BLANK• robot_grab;• end• • % detect_avoid• if robot.blue >= 0.8 & robot.carrying == TYPE_BLANK• disp(' - avoidance detected' );• end• • % detect_goal• if ( robot.blue >= .5 - .2 ) & ( robot.blue <= 0.5 + .2 )
& ( robot.green >= .5 - .2 ) & ( robot.green <= 0.5 + .2 )• • % drop_object• if robot.carrying ~= TYPE_BLANK• robot_drop;• end• end

11
Detect Object• if thermalsum > 0 & robot.carrying == TYPE_BLANK• • sumleft = sum( robot.thermal( 1:3, 1 ) );• sumcenter = sum( robot.thermal( 1:3, 2 ) );• sumright = sum( robot.thermal( 1:3, 3 ) );• • % detect_obstacle• if robot.laser == 1• • if randint( 0, 1 ) == 0• robot_moveleft;• else• robot_moveright;• end• • end
randomly moves left or right once to avoid obstacle

12
Detect Object• if sumcenter >= sumleft & sumcenter >= sumright• robot_move( robot.dir );• • elseif sumleft >= sumcenter & sumleft >= sumright• • if robot.thermal( 3, 1 ) > robot.thermal ( 1, 1 )• robot_turnleft;• • if randint( 0, 1 ) == 1• robot_turnleft;• end• • robot_move( robot.dir );• • else• robot_move( robot.dir );• robot_turnleft;• end handles movement towards heat source

13
Detect Object• else• if robot.thermal( 3, 3 ) > robot.thermal ( 1, 3 )• robot_turnright;• • if randint( 0, 1 ) == 1• robot_turnright;• end• • robot_move( robot.dir );• • else• robot_move( robot.dir );• robot_turnright;• end• end % sumcenter,left,right• • end
handles movement towards heat source

14
Move to Goal– if robot.laser >= 1
& robot.laser < 3 – – % perturb direction– if randint( 0, 1 ) == 0– robot_turnleft;– robot_turnleft;– else– robot_turnright;– robot_turnright;– end– – % move away from obstacle – robot_move( robot.dir );– robot_move( robot.dir );
– else– % move toward goal– if robot.x > robot.goal.x– robot_move( W );– elseif robot.x < robot.goal.x– robot_move( E );– end– – if robot.y > robot.goal.y– robot_move( S );– elseif robot.y < robot.goal.y– robot_move( N );– end– end

15
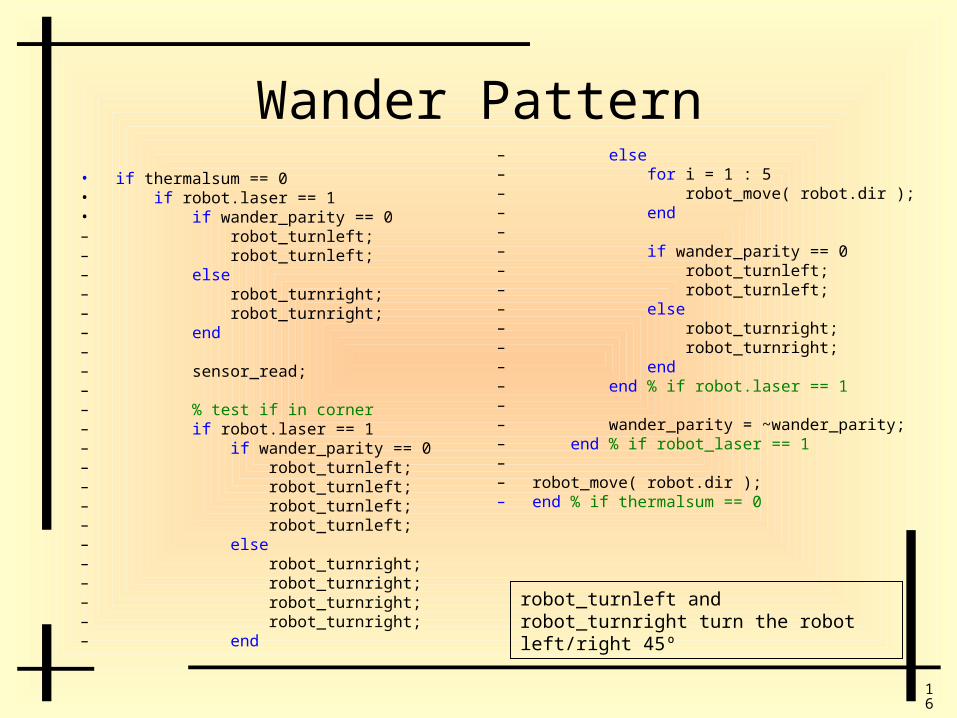
Wander Pattern
16
Wander Pattern• if thermalsum == 0• if robot.laser == 1• if wander_parity == 0– robot_turnleft;– robot_turnleft;– else– robot_turnright;– robot_turnright;– end– – sensor_read;– – % test if in corner– if robot.laser == 1– if wander_parity == 0– robot_turnleft;– robot_turnleft;– robot_turnleft;– robot_turnleft;– else– robot_turnright;– robot_turnright;– robot_turnright;– robot_turnright;– end
– else – for i = 1 : 5– robot_move( robot.dir );– end– – if wander_parity == 0– robot_turnleft;– robot_turnleft;– else– robot_turnright;– robot_turnright;– end– end % if robot.laser == 1– – wander_parity = ~wander_parity;– end % if robot_laser == 1– – robot_move( robot.dir ); – end % if thermalsum == 0
robot_turnleft and robot_turnright turn the robot left/right 45º

17
Original Plan Planned for multiple robots
Use implicit communication (stigmergy) through use of pheromones
Follow own pheromone trails back to sources of rewards, to goal, and around obstacles
Avoid other pheromone trails to prevent redundant searching
Ideally more robots could be added without changing any code

18
Actual Results Ran out of time!
Have single robot with no pheromones Inefficient obstacle avoidance Inefficient coverage of area
Some singularities may exist Rare looping around rewards (depends on
environment and robot direction) 3041 moves, 1232 turns (on average)
Taken from 10 simulation runs Moves ranged from 4633-2049 Turns ranged from 972-1470

19
Actual Results 25 separate MATLAB files
1225 lines of code total 193 lines for forage script 276 lines for display 5455 elements using 48694 bytes 7 scripts, 47 functions, 10 subfunctions

20
Actual Results

21
Future Work Add pheromone trails and multiple robots Enhance obstacle avoidance and detection Restructure reactive behavior code
Perhaps place code so that executed every time move or every time sensors are read
Force every action to update simulation figure

22
What We Learned Reactive approach demonstrates Braitenberg
teachings Designing simple rules to generate intended
emergence is tough Appearance of free will?
“the hobgoblin of philosophy” Inductive behavior analysis is tougher than
deductive Simple interactions may be the explanation

23
Simulation

















