45
1 Constraint Programming: An Introduction Adapted by Cristian OLI from Peter Stuckey (199 Ho Chi Minh City
| Date post: | 25-Dec-2015 |
| Category: |
Documents |
| Upload: | darren-carr |
| View: | 213 times |
| Download: | 0 times |

1
Constraint Programming: An
Introduction
Adapted by Cristian OLIVAfrom Peter Stuckey (1998)
Ho Chi Minh City
2
Definitions A constraint C is of the form
1 2 mc c c
where m0 y c1,c2,…,cm are primitives constraints.
There are two distinct constraints : TRUE and FALSE
The empty conjunction of constraints is written as true.
The conjunction of two constraints C1 and C2 is written
1 2C C

3
DefinitionsGiven a domain D and a constraint C, we can determine valuesof variables for which the constraint holds.
EXAMPLE 1. X=Y+Z
The assignment : 10, 7, 3X Y Z
Holds the constraint and for that the constraint is TRUE.
The assignment : 10, 4, 5X Y Z Doesn’t hold the constraint and then the constraint is FALSE.

4
Definitions A set of pairs for a set V of variables is
an asignment of values from the domaine D to variables in V. Let be V={x1,x2,…,xn} and V'V, then (V') is :
1 1( ') {( , ), , ( , )}
p pi i i iV x t x t
where
1' { , , }
pi iV x x

5
Definitions (V') is an instantiation of the variables
in V'. An instantiation (V'), where V'V, is a
partial solution if it satisfy all primitive constraints that contain the variables of V'.
An instantiation (V) is a solution if it satisfy the constraint C with domain D.
6
Definitions A constraint C is satisfiable if it has at least
one solution. Otherwise, it is unsatisfiable.
Two constraints C1 and C2 are equivalent if they have the same set of solutions.
7 1X Y 1 7Y X
7
Definitions The function primitivas takes a constraint.
1 2 mc c c and returns the set of primitive constraints {c1,c2,…,cm}
1 1( ... ) { ,..., }m mprimitivas c c c c
8
Definitions Given a constraint C and given a domain
D,
Satisfaction : Does the constraint have a solution?
Solution : Give me a solution to the constraint if one exists.
Constraint solver is an algorithm that determine the satisfaction of a constraint. However, these algorithmsfind solutions too.

9
Domains In general, constraints in Constraint
programming mainly operate on domains which are either discrete or continuous. The most known are : Linear arithmetics constraints Booleans constraints Sequence constraints Blocks world constraints Finite constraints domains Others…

10
Finite Constraint Domains Constraint Satisfaction Problems (CSP). A CSP consist in :
A set of variables V={x1,x2,…,xn} For each variable xi there is a finite set of
possible values D(xi) (domain) A set of constraints C that restrict possible
values that a variable can take. A solution to the CSP is an instantiation
(V) that satisfy C.

11
Constraint Satisfaction Problem ¿How to model an optimisation problem by
using CSP ?
It can be express as a sequence of CSP. For instance, we can create a variable that represents the objective value. We can add the following constraint:
Objective_function<objective_current_value
Different kinds of constraint satisfaction techniques Some of the constraint satisfaction
techniques are: Chronological backtracking: Exponential time
complexity. Complete solver.
Polynomial time complexity. Incomplete Solver. Local consistency
Node consistency Arc Consistency Hyper-arc Consistency Bounds consistency
12
13
Local Consistency Notion The arity of a primitive constraint is
the number of variables it involves.
:c X Y
•The arity of a CSP is equal to the arity of the highest arity constraint.
1X X Y
14
Local Consistency Notion An instantiation (V') , where V'V, is
consistent if and only if (V') is a partial solution of CSP.
A solution to the CSP is a consistent instantiation (V).

15
Node and Arc consistency Basic Idea: Find a CSP equivalent to the original
one with smaller domains. Key: examine 1 prim. constraint c, one at a time. Consistency-Node: (vars(c)={x}) remove the
values of the domain of x that no satisfy c Consistency-Arc: (vars(c)={x,y}) remove the
values of D(x) for which there is not a value in D(y) that satisfy c and vice-versa.

16
Node consistent
A primitive constraint c es node consistent with domain D if |vars(c)| 1 or if vars(c) = {x} then for each d in D(x)d x is a solution of c.
A CSP is node consistent if each primitive constraint is node consistent with D.
17
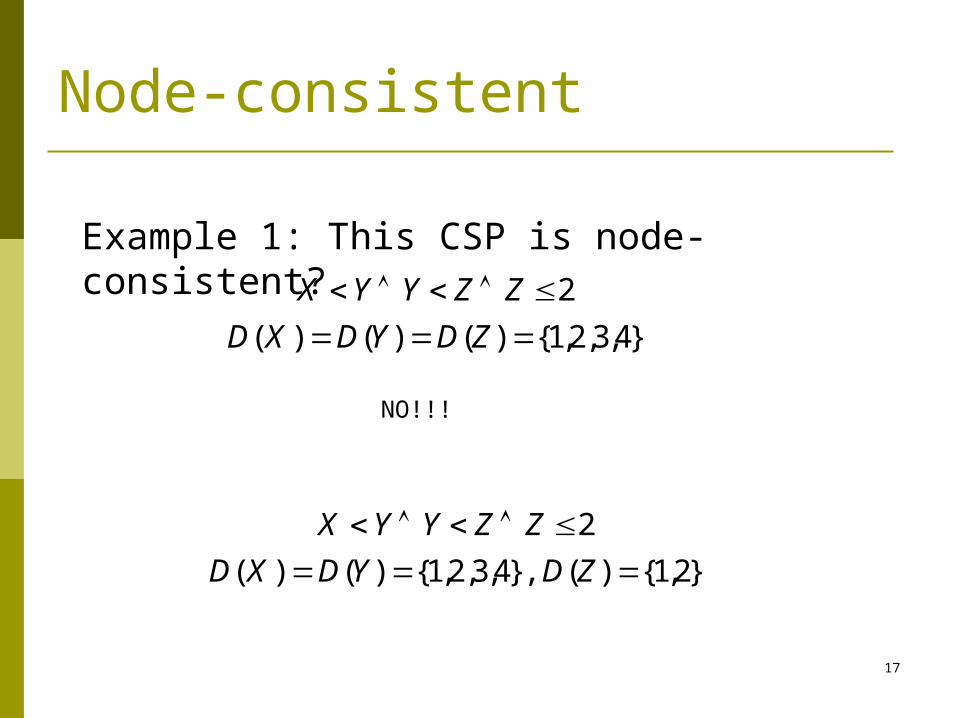
Node-consistent
Example 1: This CSP is node-consistent?X Y Y Z Z
D X D Y D Z
2
1 2 3 4( ) ( ) ( ) { , , , }
X Y Y Z Z
D X D Y D Z
2
1 2 3 4 1 2( ) ( ) { , , , }, ( ) { , }
NO!!!
18
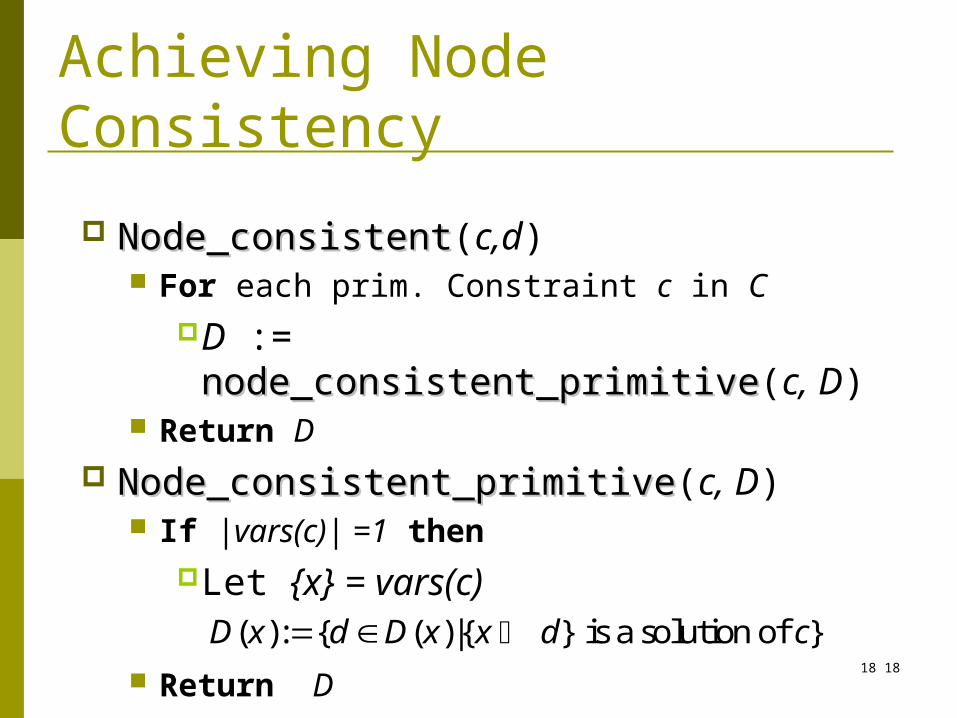
Achieving Node Consistency
18
Node_consistentNode_consistent(c,d) For each prim. Constraint c in C
D := node_consistent_primitivenode_consistent_primitive(c, D)
Return D Node_consistent_primitiveNode_consistent_primitive(c, D)
If |vars(c)| =1 thenLet {x} = vars(c)
Return D
D x d D x x d c( ): { ( )|{ } } is a solution of
19
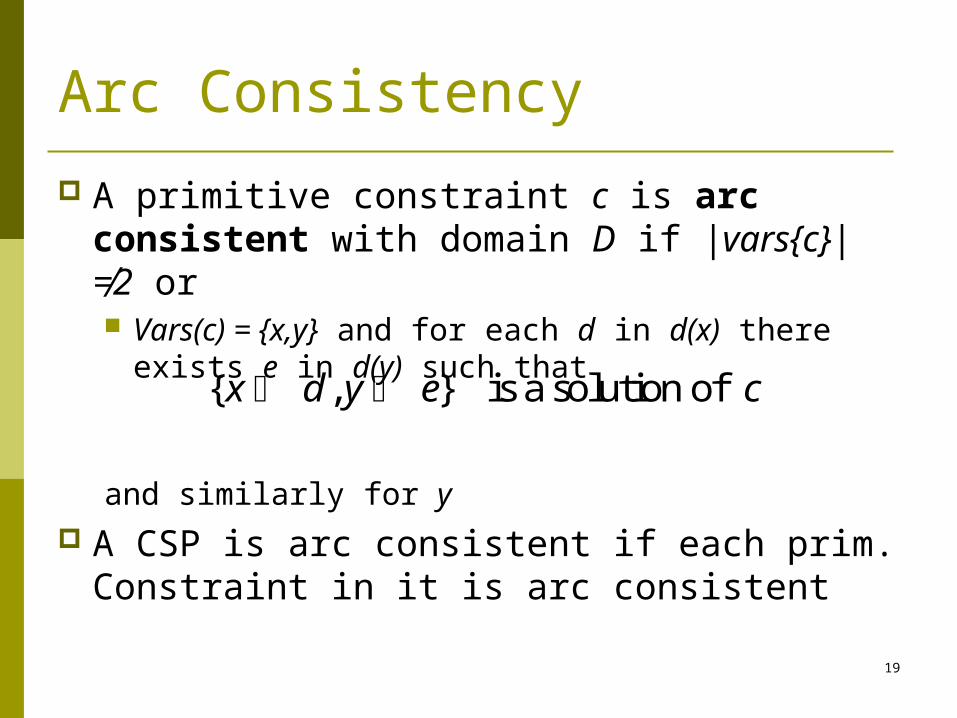
Arc Consistency
A primitive constraint c is arc consistent with domain D if |vars{c}| ≠2 or Vars(c) = {x,y} and for each d in d(x) there
exists e in d(y) such that
and similarly for y A CSP is arc consistent if each prim.
Constraint in it is arc consistent
{ , }x d y e c is a solution of
20
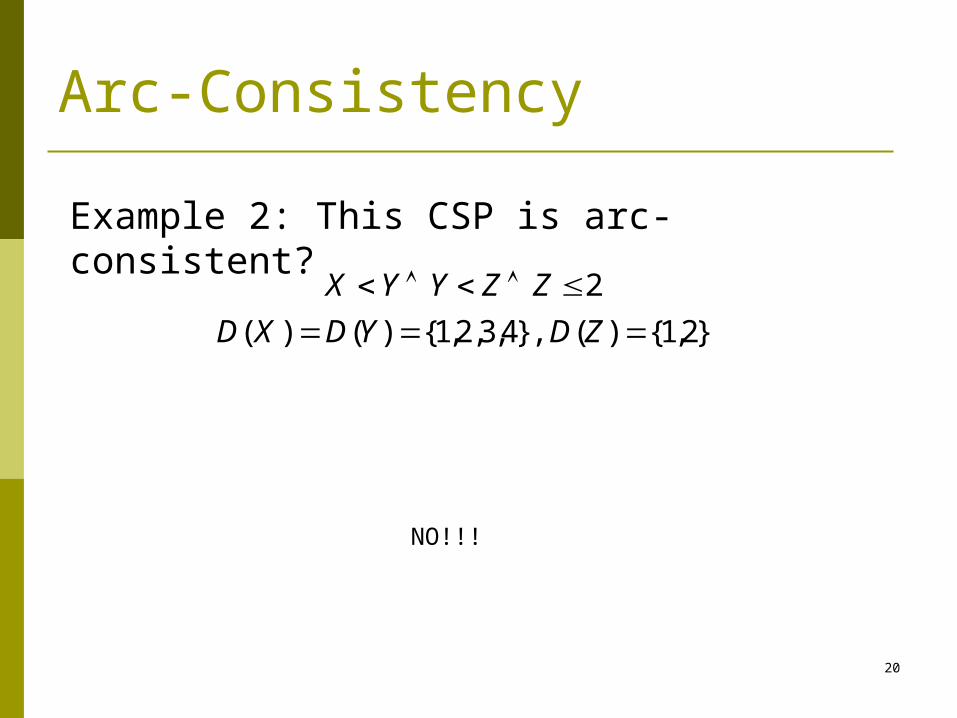
Arc-Consistency
Example 2: This CSP is arc-consistent?
X Y Y Z Z
D X D Y D Z
2
1 2 3 4 1 2( ) ( ) { , , , }, ( ) { , }
NO!!!
21
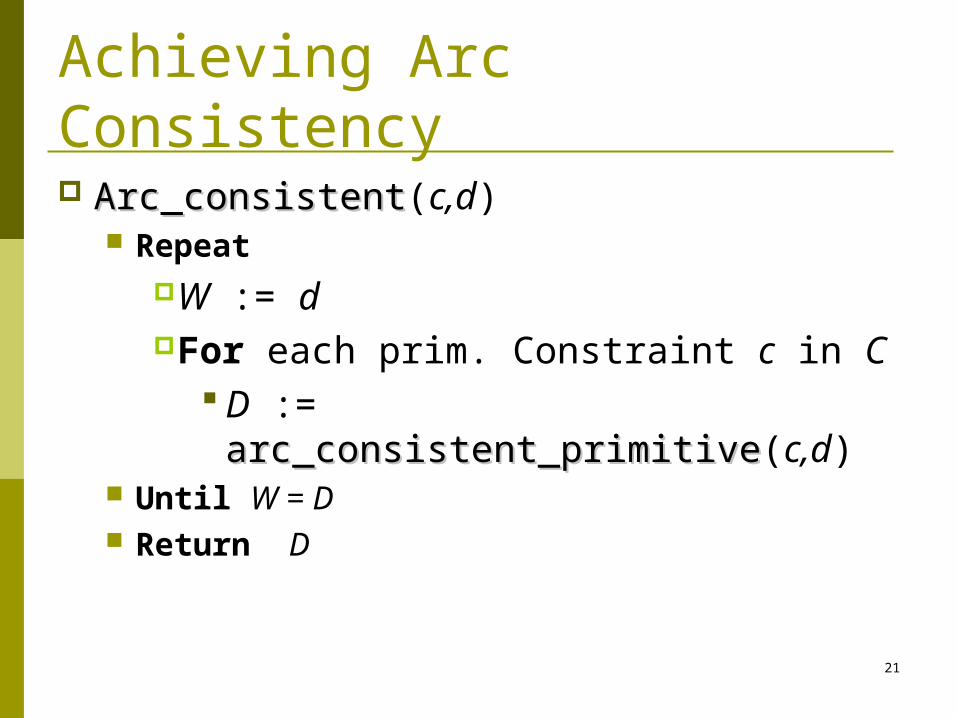
Achieving Arc Consistency
Arc_consistentArc_consistent(c,d) Repeat
W := dFor each prim. Constraint c in C
D := arc_consistent_primitivearc_consistent_primitive(c,d) Until W = D Return D
22
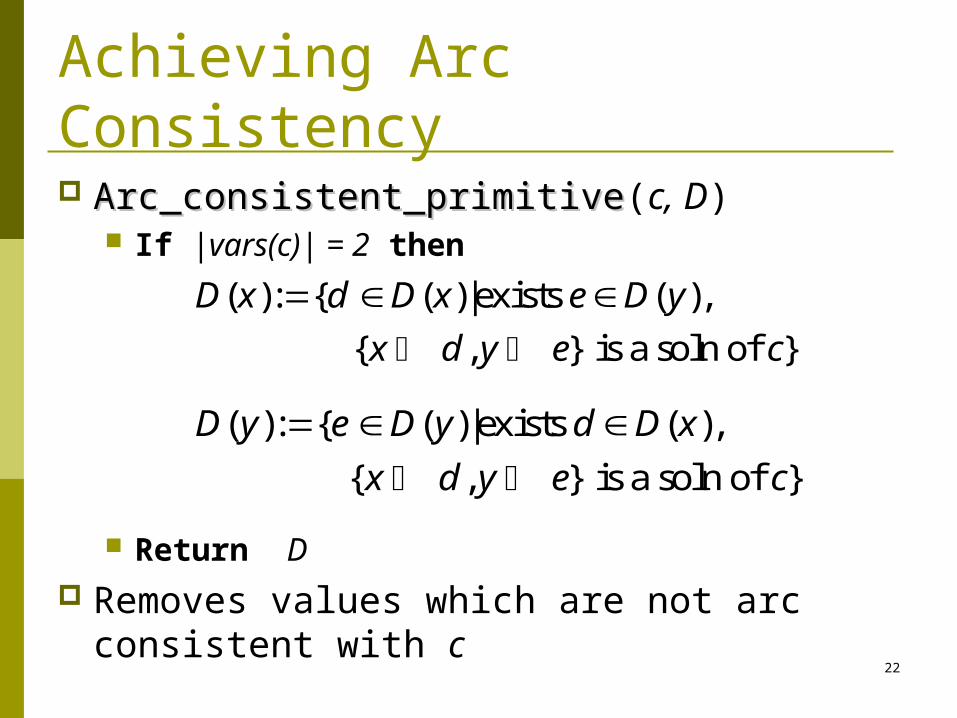
Achieving Arc Consistency
Arc_consistent_primitiveArc_consistent_primitive(c, D) If |vars(c)| = 2 then
Return D Removes values which are not arc
consistent with c
D x d D x e D y
x d y e c
( ): { ( )| ( ),
{ , } }
exists
is a soln of
D y e D y d D x
x d y e c
( ): { ( )| ( ),
{ , } }
exists
is a soln of
23
Using node and arc consistency. We can build constraint solvers using the
consistency methods Two important kinds of domain
False domain: some variable has empty domain
Valuation domain: each variable has a singleton domain

24
Node and Arc Cons. Solver
Arc_solve(C,D) D := node_consistentnode_consistent(C,D) D := arc_consistentarc_consistent(C,D) if D is a false domain
return false if D is a valuation domain
return satisfiable(C,D) return unknown

25
Example : Graph colouring
A
B
C
D
E
F
G
26
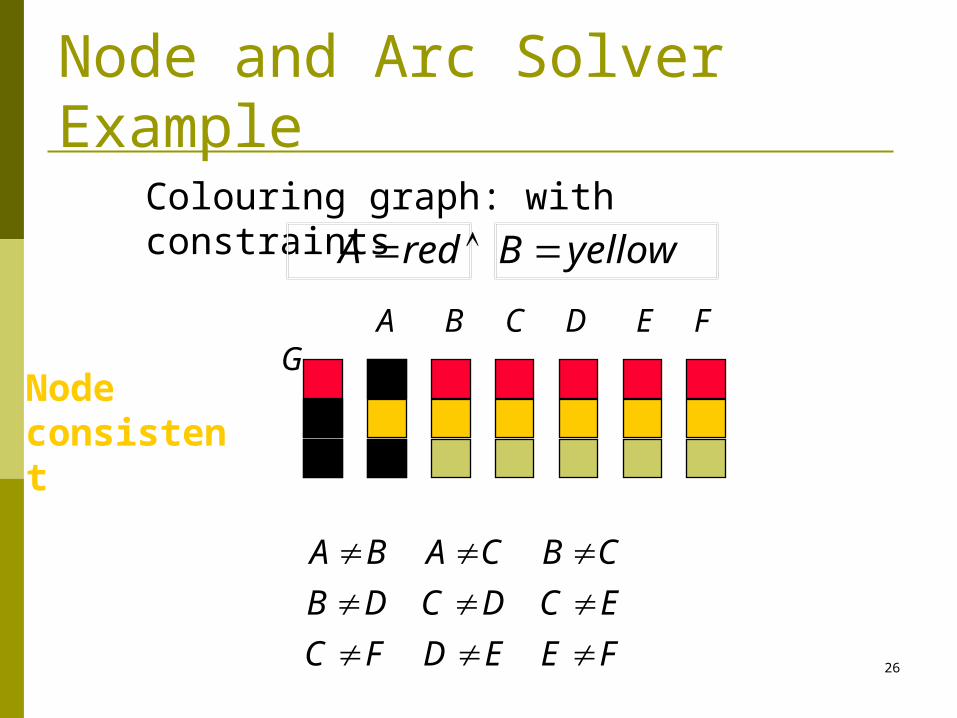
Node and Arc Solver Example
Colouring graph: with constraints
FEEDFC
ECDCDB
CBCABA
A B C D E F G
Node consistent
yellowBredA

27
A B C D E F G
Arc consistent
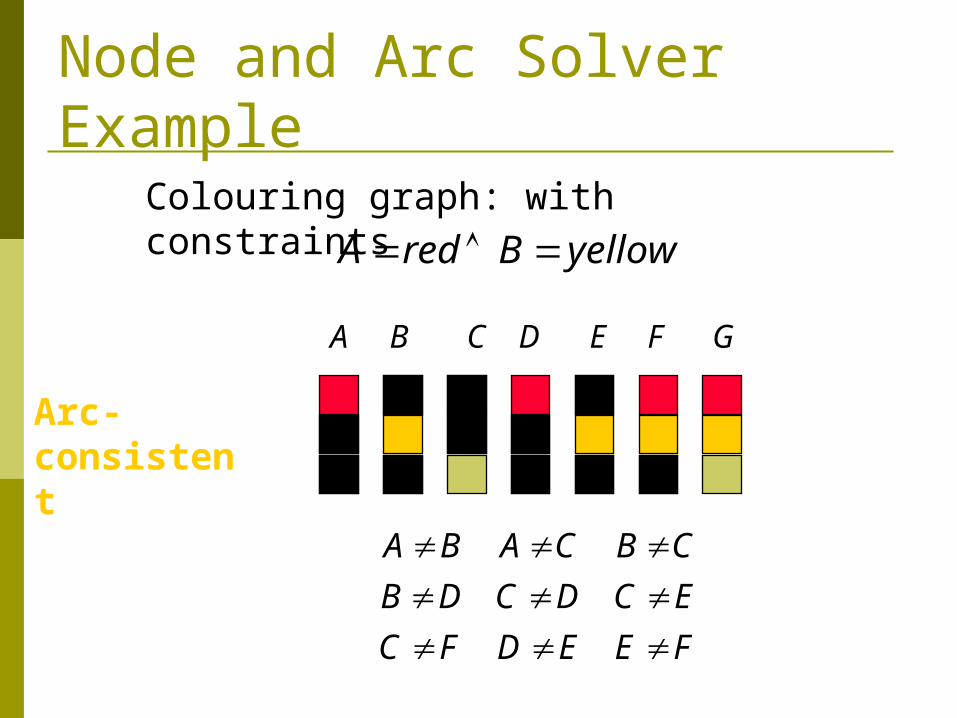
Node and Arc Solver Example
Colouring graph: with constraints
yellowBredA
FEEDFC
ECDCDB
CBCABA
A B C D E F G
Arc-consistent
Node and Arc Solver Example
Colouring graph: with constraints
yellowBredA
FEEDFC
ECDCDB
CBCABA
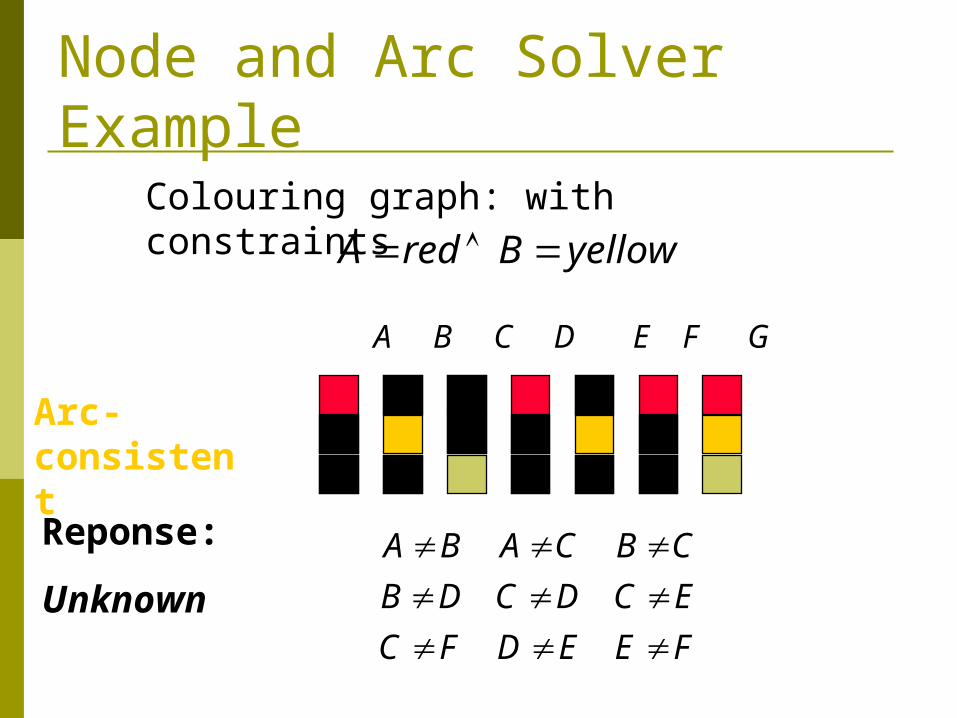
A B C D E F G
Arc-consistent
Reponse:
Unknown
Node and Arc Solver Example
Colouring graph: with constraints
yellowBredA
FEEDFC
ECDCDB
CBCABA
30
Backtracking Constraint Solver We can combine consistency with the
backtracking solver. Apply node and arc consistency before
starting the backtracking solver and after each variable is given a value.

31
A B C D E F G
Backtracking
Choice a variable whose domain has a cardinality >1, G
Add constraint G=red Apply consistency
Reponse: satisfiable (TRUE)
Backtracking Constraint Solver
Colouring graph: with constraints
yellowBredA

32
Hyper-arc consistency What happens when we have primitive
constraints that contains more than two variables?
hyper-arc consistency: extending the arc consistency to a arbitrary number of variables.
Unfortunately determine the hyper-arc consistency is NP-hard.
What is the solution?
33
Hyper-arc consistency A primitive constraint c is hyper-arc
consistent with domain D if for each variable x in c and domain assignment tD(X), there is an assignment t1,…,tk to the remaining variables in c such that tj
D(Xj) for 1j k and ((t1,X1),…(tk,Xk)) is a solution of c.
A CSP is hyper-arc consistent if each primitive constraint ci is hyper-arc consistent.
34
Bounds Consistency arithmetic CSP: constraints are integer range: [l..u] represents the set of integers {l,
l+1, ..., u} idea use real number consistency and only
examine the endpoints (upper and lower bounds) of the domain of each variable
Define min(D,x) as minimum element in domain of x, similarly for max(D,x)

35
Bounds consistency
A prim. constraint c is bounds consistent with domain D if for each var x in vars(c) exist real numbers d1, ..., dk for remaining
vars x1, ..., xk such that :
is a solution of c And similarly for
An arithmetic CSP is bounds consistent if all its primitive constraints are.
1 1{ min ( ), , }D k kx x x d x d
{ max ( )}Dx x
36
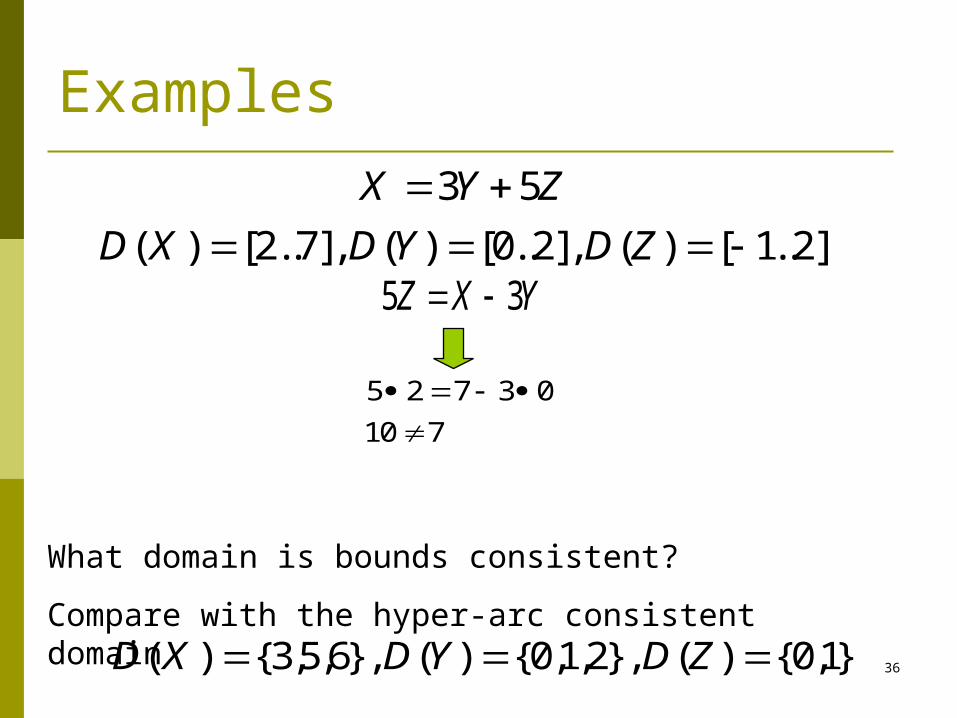
Examples
X Y Z
D X D Y D Z
3 5
2 7 0 2 1 2( ) [ .. ], ( ) [ .. ], ( ) [ .. ]
What domain is bounds consistent?
Compare with the hyper-arc consistent domainD X D Y D Z( ) { , , }, ( ) { , , }, ( ) { , } 3 5 6 0 1 2 0 1
5 3Z X Y
5 2 7 3 0
10 7
37
Achieving Bounds Consistency Given a current domain D we wish to
modify the endpoints of domains so the result is bounds consistent
propagation rules do this

38
Achieving Bounds ConsistencyConsider the primitive constraint X = Y + Z which is equivalent to the three forms
X Y Z Y X Z Z X Y
Reasoning about minimum and maximum values: :
Propagation rules for the constraint X = Y + Z
min ( ) min ( )D DX Y Z max ( ) max ( )D DX Y Z
min ( ) max ( )D DY X Z max ( ) min ( )D DY X Z
min ( ) max ( )D DZ X Y max ( ) min ( )D DZ X Y

39
Propagation rules for X=Y+Z
Bounds_consistency(D)
min : max{min ( ),min ( ) min ( )}D D DX X Y Z
max : min{max ( ),max ( ) max ( )}D D DX X Y Z
min max( ) : { ( ) | }x XD X d D X X d X
min : max{min ( ),min ( ) max ( )}D D DY Y X Z
max : min{max ( ),max ( ) min ( )}D D DY Y X Z
min max( ) : { ( ) | }y YD Y d D Y Y d Y
min : max{min ( ),min ( ) max ( )}D D DZ Z X Y
max : min{max ( ),max ( ) min ( )}D D DZ Z X Y min max( ) : { ( ) | }z ZD Z d D Z Z d Z
Return D

40
Propagation rules for
Disequations give weak propagation rules, only when one side takes a fixed value that equals the minimum or maximum of the other is there propagation.
Y Z
D Y D Z
D Y D Z
D Y D Z D Y D Z
( ) [ .. ], ( ) [ .. ]
( ) [ .. ], ( ) [ .. ]
( ) [ .. ], ( ) [ .. ] ( ) [ .. ], ( ) [ .. ]
2 4 2 3
2 4 3 3
2 4 2 2 3 4 2 2
no propagation
no propagation
prop
41
Alldifferent
alldifferent({V1,...,Vn}) holds when each variable V1,..,Vn takes a different value alldifferent({X, Y, Z}) is equivalent to
Arc consistent with domain
BUT there is no solution! specialized consistency for alldifferent can find it
X Y X Z Y Z
D X D Y D Z( ) { , }, ( ) { , }, ( ) { , } 1 2 1 2 1 2

42
Other Complex Constraints
schedule n tasks with start times Si and durations Di needing resources Ri where L resources are available at each moment
array access if I = i, then X = Vi and if X ≠ Vi then I ≠ i
cumulative S S D D R R Ln n n([ , , ],[ , , ],[ , , ], )1 1 1
element I V V Xn( ,[ , , ], )1
43
Optimization for CSP
Because domains are finite can use a solver to build a straightforward optimizer
retry_int_optretry_int_opt(C, D, f, best) D2 := int_solvint_solv(C,D) if D2 is a false domain then return best let sol be the solution corresponding to D2 return retry_int_optretry_int_opt(C /\ f < sol(f), D, f, sol)
44
Optimization Backtracking
Since the solver may use backtrack search anyway combine it with the optimization
At each step in backtracking search, if best is the best solution so far add the constraint f < best(f)
45
Branch and Bound Opt.
The previous methods,unlike simplex don't use the objective function to direct search
branch and bound optimization for (C,f) use simplex to find a real optimal, if solution is integer stop otherwise choose a var x with non-integer opt
value d and examine the problems
use the current best solution to constrain prob. ( , ) ( , )C x d f C x d f

















