1 November 2005 Stefano Nolfi* Dario Floreano ~ * Institute of Psychology, National Research Council Viale Marx 15, Roma, Italy ~ LAMI - Laboratory of Microcomputing Swiss Federal Institute of Technology EPFL, Lausanne, Switzerland December 1997 ( revised May 1998 ) Co-evolving predator and prey robots : Do ‘arms races’ arise in artificial evolution ? Presented by Assaf Glazer
Transcript
1 November 2005
Stefano Nolfi* Dario Floreano~
*Institute of Psychology, National Research CouncilViale Marx 15, Roma, Italy
~LAMI - Laboratory of MicrocomputingSwiss Federal Institute of Technology
EPFL, Lausanne, Switzerland
December 1997(revised May 1998)
Co-evolving predator and prey robots:Do ‘arms races’ arise in artificial evolution?
Presented by Assaf Glazer
Co-evolving predator and prey robots:Do ‘arms races’ arise in artificial evolution?
Presented by Assaf Glazer
2 November 2005
MAIN TOPICS
• Abstract• Introduction• Co-Evolving Predator and Prey Robots• The Experimental Model• Results• Conclusions• Summary
3 November 2005
ABSTRACT
• Cooperative Vs. Competitive Co-evolution.
• Investigate the role of co-evolution in the context of evolutionary robotics.
• How co-evolution may potentially enhance the power of adaptation of artificial evolution.
• in what conditions co-evolution can lead to “arms races”.
• We will show that in some cases artificial co-evolution has a higher adaptive power than simple evolution.
Co-Evolution - the evolution of two or more competing
populations with coupled fitness.
5 November 2005
INTRODUCTION
• Co-evolution has several features that may potentially enhance the adaptation power of artificial evolution:
o Increasingly complex evolving challenges – produce “arms race”.
o Individual fitness depends on the other population with vary during the evolutionary process - more general solutions are selected.
o The ever changing fitness landscape - preventing stagnation in local minima.
• Unfortunately, coevolving populations may cycle.
• Cycling may cancel out all the previously described advantages.
• We will try to understand in which conditions co-evolution can lead to “arms races”.
6 November 2005
CO-EVOLVING PREDATOR AND PREY ROBOTS
• Co-evolution in the context of predators and prey in simulation.
• The simulations were based on real the Khepera robots.
• Predators and prey belong to different species with different sensory and motor characteristics:
o Predator with a vision moduleo Prey had a maximum available
speed set to twice that of the
predator.
7 November 2005
THE EXPERIMENT MODEL
• A square arena 47 x 47 cm in size.
• Both individuals were provided with eight
infrared proximity sensors.
• The predator had a view-angle of 36°
dividing into five sectors.
• Using neural network architecture:
o Two sigmoid units with recurrent connection.
o Predator – connections from 8 infrared + 5
photoreceptors sensors.
o Prey - 8 infrared sensors, speed output is multiply by 2 before setting the wheel speed.
o Connection Weight Evolution
8 November 2005
• 16 synapses from the infrared sensors.
• 4 synapses from recurrent connections between the preceptors.
• 2 sigmoid thresholds.
• 10 synapses from the vision sensors )only the predator(.
• The competition ended either when the predator touched the prey or after 500 motor updates.
• Each individual was tested against the best competitors of the ten previous generations.
Evolutionary Parameters:
• Two populations of 100 individuals.
• 100 generations.
• Initial population - Randomly assigned genotype.
• Fitness function – Sums of 1 and 0 per each of the 10 competitions.
• Selection - The best 20 were allowed to reproduce, 5 offspring each.
• One Point Crossover.
• Randomize mutation - pm = 0.023
THE EXPERIMENT MODEL1st Experiment
10 November 2005
Monitoring Parameters:
• “Red Queen Effect” – It’s hard to monitor progress by taking measures of the fitness throughout generations.
• “Master Tournament” - Avoid this problem by testing the performance of the best individual in each generation against all the best competing ancestors.
EXPERIMENT MODEL1st Experiment
11 November 2005
RESULTS1st Experiment
• Performance does not increase at all throughout generations.
• Sudden drops.
• Effective strategies may be lost instead of being retained and refined.
• Cycling )A – Predatory, B – Prey(:
o A1 – Chasing the prey.
o A2 – Tracking the prey and attacking on special occasions.
o B1 – Stay still close to walls.
o B2 – Moving fast
o A1 > B1, B2 > A1, A2 > B2, B1 > A2
12 November 2005
RESULTS1st Experiment
• The cycling process is driven in general by prey.
• The efficacy and generality of the different selected strategies does not increase.
• In fact, individuals of later generations do not necessarily score well against competitors of much earlier generations.
13 November 2005
RESULTS1st Experiment
14 November 2005
CONCLUSIONS
• The experiment is not so simple due to:
o Many different strategies.
o the advantage against another strategy is probabilistic.
o Hard to define toward which one of the strategies does the generation converge.
• The cycling can be clearly identified.
• “Hall of the Fame” - Fighting cycling by testing individuals against all discovered solutions.
1st Experiment
15 November 2005
Experimental Parameters:
• “Hall of Fame” competitions - 10 opponents randomly selected from all
• previous generations.
• All other parameters remain the same.
Evolutionary Parameters:
• The same.
EXPERIMENT MODEL2nd Experiment
16 November 2005
RESULTS2nd Experiment
• We obtain a progressive increase in performance.
• Same classes of strategies which are evolutionarily more stable.
• Enables the co-evolutionary process to progressively refine current strategies.
17 November 2005
RESULTS2nd Experiment
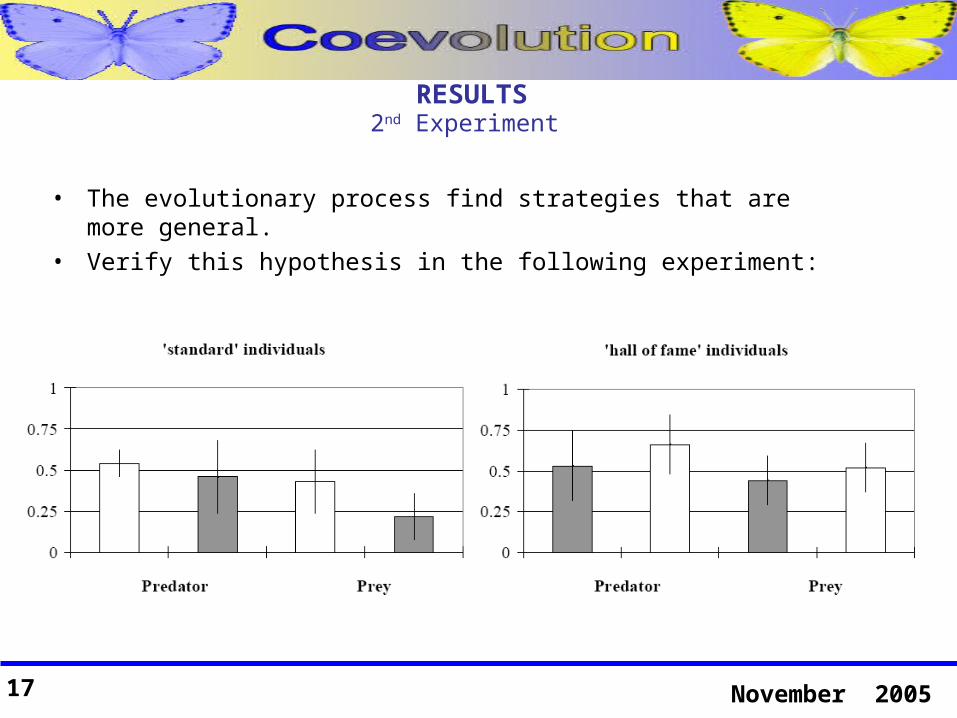
• The evolutionary process find strategies that are more general.
• Verify this hypothesis in the following experiment:
18 November 2005
CONCLUSIONS
• As the process goes on there is less and less pressure to discover strategies that are effective against the opponent of the current generation.
• This type of solution is of course implausible from a biological point of view.
• The prey cannot improve its strategy above a certain level.
• The length of ‘arms races’ may vary in different conditions.
• Increase the richness of the prey’s sensory system.
2nd Experiment
19 November 2005
Experimental Parameters:
• Provide the prey a camera with a view-angle of 240°, divided into 5 sectors of 48°.
• Prey and predatory have 13 sensors each.
• All other parameters remain the same as the 1st experiment.
Evolutionary Parameters:
• Prey and predator have the same length of genotype.
• All parameters remain the same as the 1st experiment.
EXPERIMENT MODEL3rd Experiment
20 November 2005
RESULTS3rd Experiment
• Prey in general overcomes predators.
• A significant increase in performance is observed in both populations.
21 November 2005
RESULTS3rd Experiment
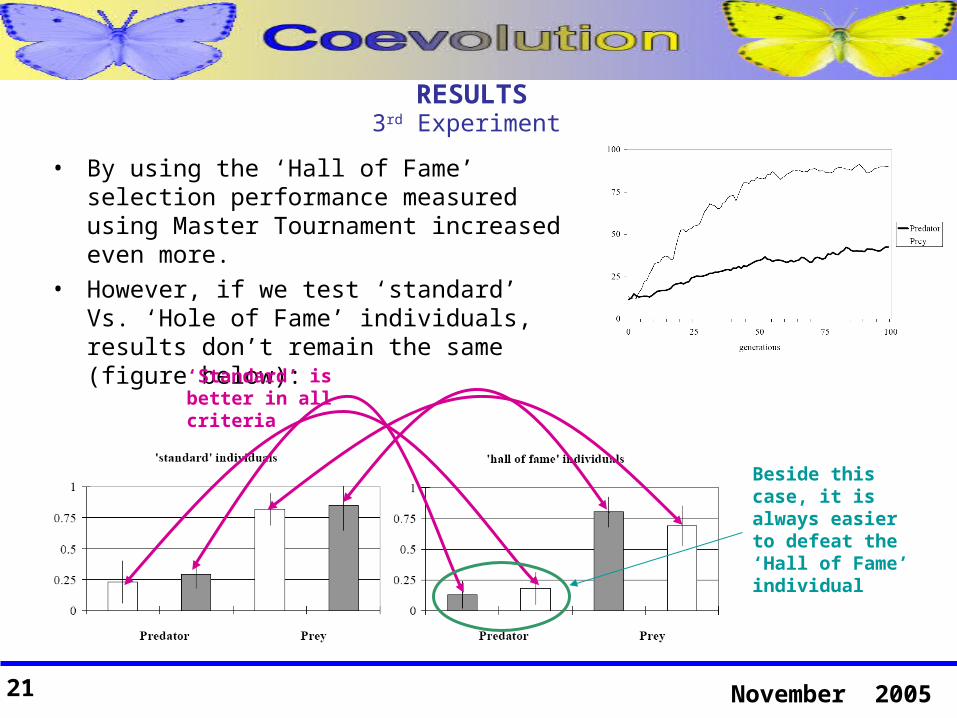
• By using the ‘Hall of Fame’ selection performance measured using Master Tournament increased even more.
• However, if we test ‘standard’ Vs. ‘Hole of Fame’ individuals, results don’t remain the same )figure below(:
‘Standard’ is better in all criteria
Beside this case, it is always easier to defeat the ‘Hall of Fame’ individual
22 November 2005
CONCLUSIONS
• the ‘Hall of Fame’ might be even less effective throughout the generations
• By using simulated robots instead of real one we affect the course of the evolutionary process.
• The experimenter may unintentionally introduce constraints.
• By changing the initial conditions ‘arms races’ can continue to produce better and better solutions in both populations.
• If one or both sides fail to improve it is likely to lead into a limit cycle.
• The richness of the environment may prevent the cycling.
3rd Experiment
23 November 2005
Experimental Parameters:
• Five different environments )right figure(.
• 10 epochs, 2 per each environment.
• All other parameters remain the same
as the ‘Standard’ 1st experiment.
Evolutionary Parameters:
• Prey and predator have the same length of genotype.
• All parameters remain the same as the 1st experiment.
EXPERIMENT MODEL4th Experiment
24 November 2005
RESULTS4th Experiment
• a significant increase in performance of the best.
• The average results, however, show a slight increase only in the first 20 generations.
25 November 2005
CONCLUSIONS
• The richness of the environment may delay the convergence of the co-evolutionary process towards a limit cycle.
• Larger the number of fixed constraints is, the lower the importance of the co-evolutionary dynamic may be.
• How co-evolution can enhance the adaptive power of artificial evolution?
• Can artificial co-evolution solve tasks that cannot be solved using a simple evolutionary process?
4th Experiment
26 November 2005
Experimental Parameters:
• Increasing the problem complexity:
o Predator and prey were equipped with 8 ambient light sensors.
o 60x60cm environment with 13 cylindrical obstacles.
• Each prey individual was tested against the best predator obtained using co-evolution and conversely for each predator individual.
• All other parameters remain the same.
Evolutionary Parameters:
• Simple evolution.
• One populations of 100 preys.
• One populations of 100 predators.
• Initial population - Randomly assigned genotype.
• All other parameters remain the same as in the ‘Standard’ selection.
EXPERIMENT MODEL5th Experiment
27 November 2005
RESULTS5th Experiment
• a significant increase in performance of both average and best replications.
• predators of the very first generations have close to null performance.
• We ran a new set of experiments where predators were competed against the best prey obtained using simple evolution and conversely for preys:
– In 8 cases out of 10 simple evolution failed to select predators able to catch the co-evolved prey.
28 November 2005
CONCLUSIONS
• Simple evolution can create very effective prey or predator against the best of co-evolved predators or preys, respectively.
• “Boot Start Problem ” – The problem arises when starting from scratch.
• Two reasons why co-evolution can have an higher adaptive power than evolution:
o Individuals face with a larger number of different environmental events.
o The emergence of ‘arms races’.
4th Experiment
29 November 2005
SUMMARY
• Evolutionary Robotics as a promising new approach.
• Fighting the “Boot Start Problem ” by:
o ‘Incremental evolution’ – supervision required.
o Using co-evolution in order to produce increasingly complex.
• The “Cycling Problem”:
o Preserving previous solution may affect the evolutionary pressure.
o Like the local minima problem, it is an intrinsic problem.
o When both sides can produce better strategies, ‘arms races’ may last longer.
o The richness of the environment may limit the cycling problem.
• Co-evolution may succeed in producing individuals able to cope with very effective competitors while simple evolution is unable to do so.
30 November 2005
SUMMARY – Cont.
• If completely general solutions do not exist, we should re-consider the ‘cycling problem’. The best we can do is to select the appropriate strategy for the current counter-strategy.
• Co-evolution will lead to an increased complexity when complete general solutions exist and can be selected. Conversely, it may lead to a cycling.
• “Full General” Vs, “Plastic General”.
• In most of our experiments simple ‘Plastic General’ solutions can be found while ‘fully-general’ solutions cannot.