56
AC-to-DC PWM Converters Week 4 1
| Date post: | 17-Dec-2015 |
| Category: |
Documents |
| Upload: | lauren-stone |
| View: | 213 times |
| Download: | 0 times |

1
AC-to-DC PWM Converters
Week 4

What is it?
• Output signal alternates between on and off within specified period
• Controls power received by a device
• The voltage seen by the load is directly proportional to the source voltage
2
PWMPULSE WIDTH MODULATION

3
Switching pattern of a hypothetical four-state
PWM converter
STATE: 0 2 3 2 0
0 5 0 9 0 1 10 1 50 2 00
t s( )
t s( )
x 1
x 2

4
Stator of a three-phase electric ac machine
A
A'
B
B '
C
i A
i A
i B
i B
C'i C
i C
d
q

5
Generation of a space vector of the stator MMFs in a three-phase electric ac machine: (a) phasor diagram of stator currents, (b) vectors of MMFs
s
(b)(a)
A
A '
B
B '
C
C '
C
A
B
^I A
^I B
^IC
Re
Im
jq
d
6
MMFMagnetomotive force is a quantity appearing in the equation for the magnetic flux in a magnetic circuit, sometimes known as Hopkinson's law:
where Φ is the magnetic flux and R is the reluctance of the circuit. Magnetic reluctance, or magnetic resistance, is a concept used in the analysis of magnetic circuits. It is analogous to resistance in an electrical circuit, but rather than dissipating electric energy it stores magnetic energy

7
Magnetic flux in a magnetic circuit
1. ℱ = NI where N is the number of turns in the coil and I is the electric current through the circuit
2. ℱ = ΦR where Φ is the magnetic flux and R is the reluctance
3. ℱ = HL where H is the magnetizing force (the strength of the magnetizing field) andL is the mean length of a solenoid or the circumference of a toroid

8
Space vector of stator MMFs and its components
d
jq
j qs
ds
s
s
s

9
Introduction and definitions Types of PWM Methods of generation Characteristics of PWM Applications and examples

Definitions
• Duty Cycle: on-time / period• Vlow is often zero
10
LOWHIAVG VDDVV )1(
Types of Pulse Width
• Pulse center fixed, edges modulated
• Leading edge fixed, tailing edge modulated
• Tailing edge fixed, leading edge modulated
• Pulse Width constant, period modulated
11

Types of Pulse Width
12

Analog PWM signals can be made by combining a saw- tooth waveform and a sinusoid
13
PWM output is formed by the intersection of the saw-tooth wave and sinusoid
Analog Generation of PWM

Digital Methods of Generating PWM
• Digital: Counter used to handle transition
• Delta : used to find the PWM at a certain limit
• Delta Sigma: used to find the PWM but has advantage of reducing optimization noise
14

Applications to DC Motors
17
• The voltage supplied to a DC motor is proportional to the duty cycle
• Both brushed and brushless motors can be used with PWM
• Both analog and digital control techniques and components are available

Three Phase AC motors with PWM
• 3 different AC currents at different phases• Phase: 120 degrees apart
• Creates constant power transfer• Rotating magnetic field• Pulses substitute for AC current
18

Space Vector Modulation
• Used for three-phase AC motors• Convert DC current to AC current• Gates turned on/off at different
intervals• 3 PWM created
19

Motor Control Diagrams
20

• Average value proportional to duty cycle, D
• Low power used in transistors used to switch the signal
• Fast switching possible due to MOSFETS and power transistors at speeds in excess of 100 kHz
• Digital signal is resistant to noise
• Less heat dissipated versus using resistors for intermediate voltage values
21
Advantages of PWM

22
• Cost• Complexity of circuit• Radio Frequency Interference• Voltage spikes • Electromagnetic noise
Disadvantages of PWM

23
• Introduction and definitions• Types of PWM • Methods of generation• Characteristics of PWM• Applications and examples

• In the past, motors were controlled at intermediate speed by using resistors to lower delivered power
• Electric stove heater• Lamp dimmers• Voltage regulation – convert 12 volts to
5 volts by having a 41.7% duty cycle• Sound production: PWM controlled
signals give sound effects similar to a chorus
• Power transfer: PWM used to reduce the total power given to a load without relying on resistive losses
24
Applications of PWM

• Commonly used in toys• Lowpass filter smooths out transients
from harmonic effects• Frequency values of harmonics doesn’t
change, but the amplitude does, which adjusts the analog output signal
25
PWM used with D/A conversion

26
• Clock signal is found “inside” PWM signal
• More resistant to noise effects than binary data alone
• Effective at data transmission over long distance transmission lines
PWM used to transmit data in telecommunications

1. Must be at least 10 times higher than the control system frequency
2. Higher than 20kHz – audible frequency of sounds to avoid annoying sound disturbances, caused by magnetostriction
3. If too low the motor is pulsed, not continuous, because the motor’s inductance can not maintain the current
4. Inverse of frequency should be much less than the motor/load time constant
5. Higher error from ripple voltages
Frequency of the PWM Signal
Upper LimitsLower Limits
1. If too high the inductance of the motor causes the current drawn to be unstable
2. MOSFET transistor generates heat during switching
3. Limited by resolution of controller
4. Eddy currents generated in electromagnetic coils which lead to adverse heating
5. Heat losses in electromagnetic materials is proportional to frequency squared
10/29/2009 28

29
Single-phase PWM rectifier with an LC input filter
L
C
f
f
i i,1
i i
i i,h
voPW M RECTIFIER

Potentiometer is used to adjust the duty cycle
30
Example: PWM with 555 Timer

1.Maxon EC-16 brushless motor, Time constant = 8.75 ms2. Want to avoid audible frequencies
f ≥ 20 kHz3. PID control loop running at 150 Hz
f ≥ 10 ∙ 150 Hz
Requirements
Hz1175.81
fmsf
31
Example: Specifying circuit elements

11
44.1
CRf
Set f to 25 kHz to add in a factor of safety
Choosing C1 to be 100 nF, R1
is 576 Ω ~ 500 Ω
Recalculating with these values f = 28.8 kHz
This circuit has a PWM frequency according to:
≥ 117 Hz≥ 20 kHz≥ 1.5 kHz
f
Check constraints
32
Example: Specifying circuit elements

18 kHz frequencyContinuous 28 amps$55.95
Where can I buy a PWM controller?
Texas InstrumentsDigikeyMouser ElectronicsCritical Velocity Motor Control
Texas Instruments TAS5508B8-Channel Digital Audio PWM Processor64 pin chip, max 192 kHz frequency$7.25
120 amps, used for hybrid vehicles$469.00
SMALL
BIGGER HUGE
33

34
SAMPLE PWM CIRCUITS

35
Current-type PWM rectifier
iA
iB
iC
ia
ib
ic
LOA
D
Io
VovCN
v BN
vAN
SA SB SC
SA' SB' SC'

36
Reference current vector in the vector space of input currents of a current-type
PWM rectifier
d
jq
i*
I
I
3
2
I1
I 6
I5
I 4
I
IIIII
IV
V VI
2_3 Io
Ioj 3

37
Example waveforms of switching variables in one
switching cycle of a current-type PWM rectifier
0.0 0.2 0.4 0.6 0.8 1.0
t / Tsw
a
b
c
a'
b'
c'
1
0
0
1
0
0
STATE: 2 3 9 3 2 9

38
Control scheme of a current-type PWM rectifier
VOLTAGE VECTOR CALCULATOR
m
a...c '
SVPWMMODULATOR
RECTIFIER
vA
vB
LOA
D

39
Waveforms of output voltage and current in a current-type PWM
rectifier: (a) m = 0.75, (b) m = 0.35 (fsw/fo = 24, RLE load)
io
vo
0 t
(a)
io
vo
0 t
(b)

40
Waveforms of the input current and its fundamental in a current-type PWM rectifier: (a) m = 0.75,
(b) m = 0.35 (fsw/fo = 24, RLE load)

41
Waveforms of (a) output voltage and current, (b) input current and its fundamental, in a current-type
PWM rectifier: in the inverter
vo
io
0 t
(a)
ia
ia,1
(b)
0 t

42
Harmonic spectra of input current in a current-type PWM
rectifier: (a) fsw/fo = 24, (b) fsw/fo = 48
(b)
(a)
HARMONIC NUMBER
0 20 40 60 80 100
AM
PLIT
UD
E (
pu
)
0.001
0.01
0.1
1
10
HARMONIC NUMBER
0 20 40 60 80 100
AM
PLIT
UD
E (
pu
)
0.001
0.01
0.1
1
10

43
Voltage-type PWM rectifier
Vo
Io
iB
iC
iA
vCN
BN
ANv
v B
C
A
N
C'
A'
B '
SA SB SC
SA ' SB ' SC '

44
Phase A branch of a voltage-type PWM rectifier
D A
D A'
iA
Vo
0
va
N ' A '
SA
SA'

45
Input-voltage space vectors of a voltage-type PWM rectifier: (a) line-to-line voltages, (b)
line-to-neutral voltages
jq
d2_3 Vo
V3
V2 V4
V 5
V 6
V 1
'
'
'
'
'
'
_V 3j Vo
(a)
jq
d
__V 32
j Vo
Vo
V4
V 6V2
V3
V1
(b)
V 5

46
Reference voltage vector in the vector space of line-to-neutral input voltages of a voltage-type PWM rectifier
V6V2
V3
V1
jq
d
VI
I
IV
II
V
III v *
V5
__V 32
j Vo
Vo
V4

47
Principle of voltage-oriented control of a voltage-type PWM
rectifier
d
jQ
jq
D
ji
ji D i D
vd
q
Q
i
v
v
id
t
jvq

48
Control system of a voltage-type PWM rectifier using a rotating
reference frame and Space Vector PWM (SVPWM)
iA
iBvB
SVPWMMODULATOR
a, b , c
dqDQ
dqABC
dqDQ
id iq
Av
vd
vq
iQ
iQ*
v *Dv *
Q
vd*vq
*
-+
Vo
Vo*
iDiD
* -
+ -
+
RECT IFIER
LO
AD

49
Direct power control system of a voltage-type PWM rectifier
iA
iBvB
Av
P OW ERC A LC ULA TOR
dq
AB C
S EC TOR ID E NTIF IE R
vqvd
Av vB
STA TES ELE C TOR
Vo
q p
x
y
a, b, c
*q
Vo
zV'o
p*p
-+
q
-
p q+
+-Vo
*
LOA
D
REC TIFIE R

50
Waveforms of input voltage and current in a voltage-type PWM rectifier at unity power factor
t2
vAN BN CNvv
i iiA B C

51
Waveforms of output voltage and current in a voltage-type
PWM rectifier
t
o
ov
i
52
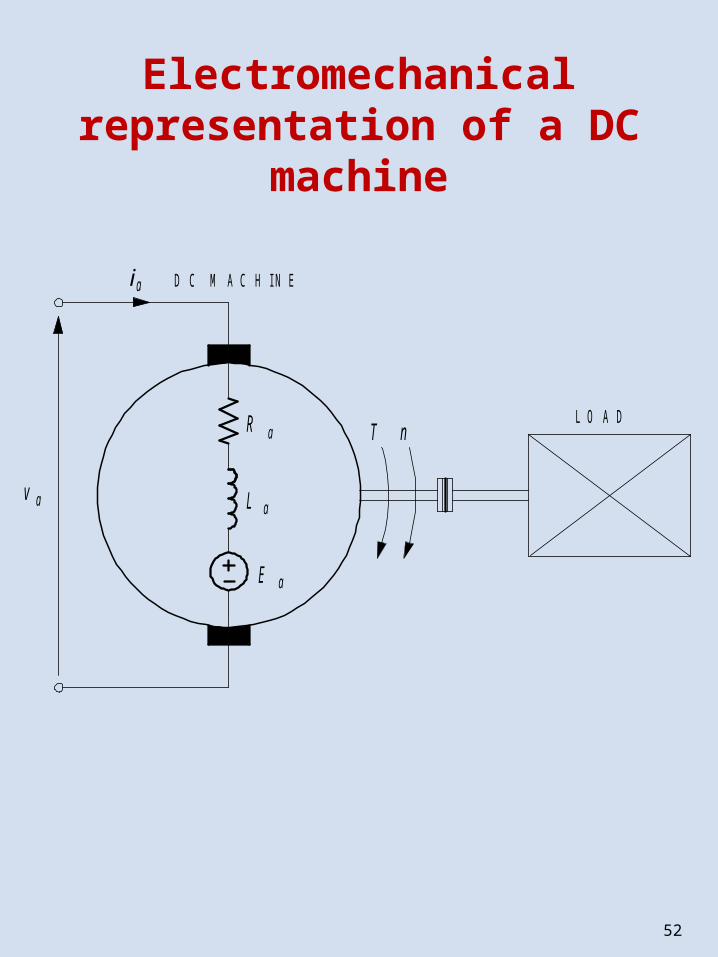
Electromechanical representation of a DC
machine
nT
E a
L a
R a
ia
va
L O A D
D C M AC H INE

53
Plane of operation, operating area, and operating quadrants of
a rotating electric machine
CLOCKW ISE
II I
IVIIIT
nMOTORING
GENERATINGCLOCKW ISECOUNTERCLOCKW ISE
MOTORING
COUNTERCLOCKW ISEGENERATING n
T

54
DC motor supplied from a rectifier with a mechanical
switch: first-quadrant operation
CBA
f < 90o
n
L a
R a
E a
i a
T
v a
Vo,dc
i o

55
DC motor supplied from a rectifier with a mechanical switch: second-
quadrant operation
CBA
f > 90o
n
L a
R a
E a
ia
T
avVo,dc
i o

56
High-voltage dc transmission system
SY
ST
EM
1
R C T1
TR 1
SY
ST
EM
2
R C T2
TR 2D C L IN E
L 1 L 2
L 3 L 4

57
Switching pattern
0 50 100 150 200
a
b
c
a'
b'
c'
1
0
0
0
0
t s
0

58
Schematic of a Vienna Rectifier

59
Top and bottom views of an air-cooled 10kW-Vienna Rectifier (400kHz PWM).

















