1 Scheduling in Anti- windup Controllers: State and Output Feedback Cases Faryar Jabbari Mechanical an Aerospace Engineering Department University of California, Irvine (UCI) November 13, 2007
Transcript
1
Scheduling in Anti-windup Controllers:
State and Output Feedback Cases
Faryar Jabbari
Mechanical an Aerospace Engineering Department University of California, Irvine (UCI)
November 13, 2007
2
Thanks
Responsible Party: Solmaz Sajjadi-Kia
Collaborators Thanh Nguyen Sharad Sirivastada Emre Kose
Support NSF Grants US D. of Ed GAANN Grants
3
Surveys
IJRNC: Michele and Bernstein, eds. (1995) IJRNC: Saberi and Stoorvogel, eds. (1999) Franco Blanchini's review article(TAC, 2000) Tarbouriech, et al., Springer, (1999) Kapila and Grigoriadis, Marcel Dekker (2003) IJRNC: Saberi and Stoorvogel, eds. (2004) Much more!
4
Motivation
Old Problem: actuator limitation is ubiquitous `Safe' (Low gain) LTI controllers are often
excessively conservative Broad approaches:
Oldest: Anti-windup Nominal high performance controller (linear design) Anti-windup augmentation
Relatively new: Explicit account of saturation nonlinearity Nonlinear design or low gain designs
5
Current Techniques to Deal with Saturation Direct Approach
Considers the controllers limitation at the very beginning of the design
Anti-windup
Augmentation on top of the nominal controller designed without considering controller bound
||W||2<W2max
6
Anti-windup
Starting in 60's (Sandberg, among many) Huge body or work, at times intuitive or even ad-hoc Many attempts at unifying, interpreting of all
techniques New rigorous stability and performance results
Morari group Teel group Many others (literally too numerous to review!) Positivity, small gain, LMI's, etc.
7
Anti windup (continued)
High performance when no saturation Ideal for `occasional' saturation Relatively weak performance when in saturation Typically open loop performance -- so open-loop
stability `often' needed (exceptions: Tell, et al. ACC-05, and a few references there)
A single controller/augmentations for all saturation levels (even almost zero?), disturbances, tracking signals, etc.
8
Explicit – direct – approach
Low-high gain (Saberi and Lin, 199x) Early LPV : Nguyen and Jabbari (1999, 2000), Scorletti, et al
(2001) Scheduling: Older work (full state):
Gutman and Hagander (1985) Wredenhagen and Belanger (1994) Megretski (1996 IFAC)
Scheduling: Recent work} Lin (1997), a little bit of observer Teel (1995), Tarboriech, et al (1999, 2000) - state feedback Wu, Packard and Grigoriadis (2000) - pure LPV Stoustrup (2005-07) Kose and Jabbari (2002, 2003)
9
Direct Approach
Stability and performance guarantees Performance not strong in small signal operation
`Some' have nice properties:
A family of controllers (rather than one) Computationally tractable (e.g., a convex search) High actuator utilization Performance guarantees dependent on actuator size and
disturbance estimate Approach flexible to incorporate different design approaches,
actuator rate limits, state constraints, tracking, etc.
10
Basic Idea 1: Combining with Scheduling
Start with a nominal controller (from somewhere!) Keep it as long as possible Once saturated, switch to a new (family of) of controller (s) that
can avoid saturation but can provide guaranteed stability and performance
Make sure there are no `cracks' or escape routs!
Assumptions: Full state or full order controllers (relaxed later) Disturbance attenuation problem (for now) Information of worst case disturbance (e.g. energy or peak) A small number of controllers (for now -- technical detail)
Kapasouris, P., Athans, M., and Stein, G., “Design of Feedback Control Systems for Stable Plants with SaturatingActuators”, Proceeding of the 27th IEEE Conf. on Decision and Control, Austin, TX, December 1988.
44
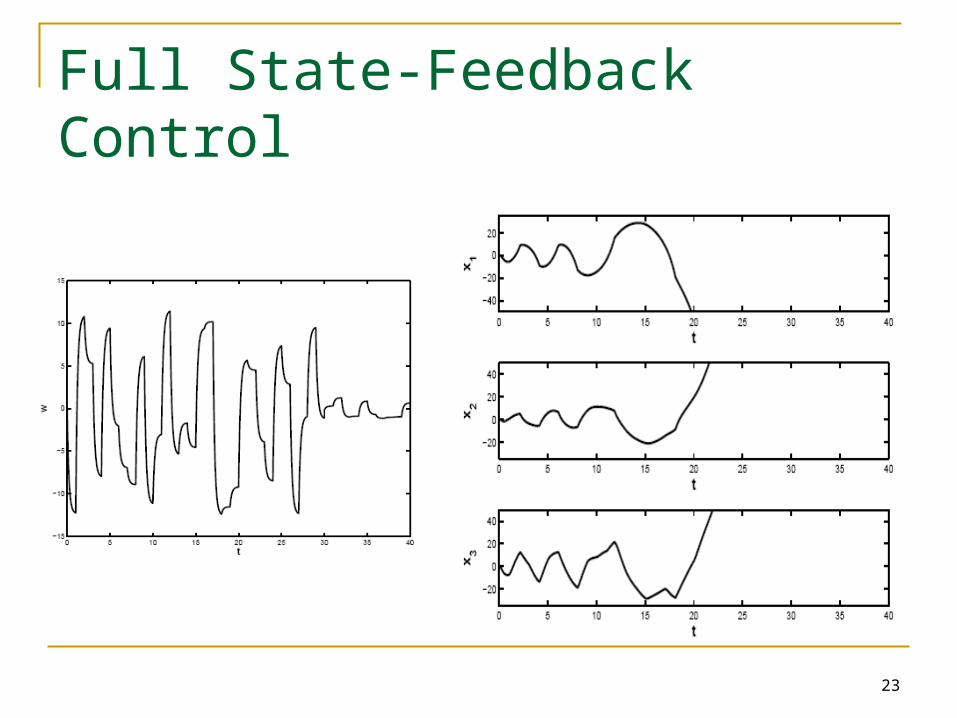
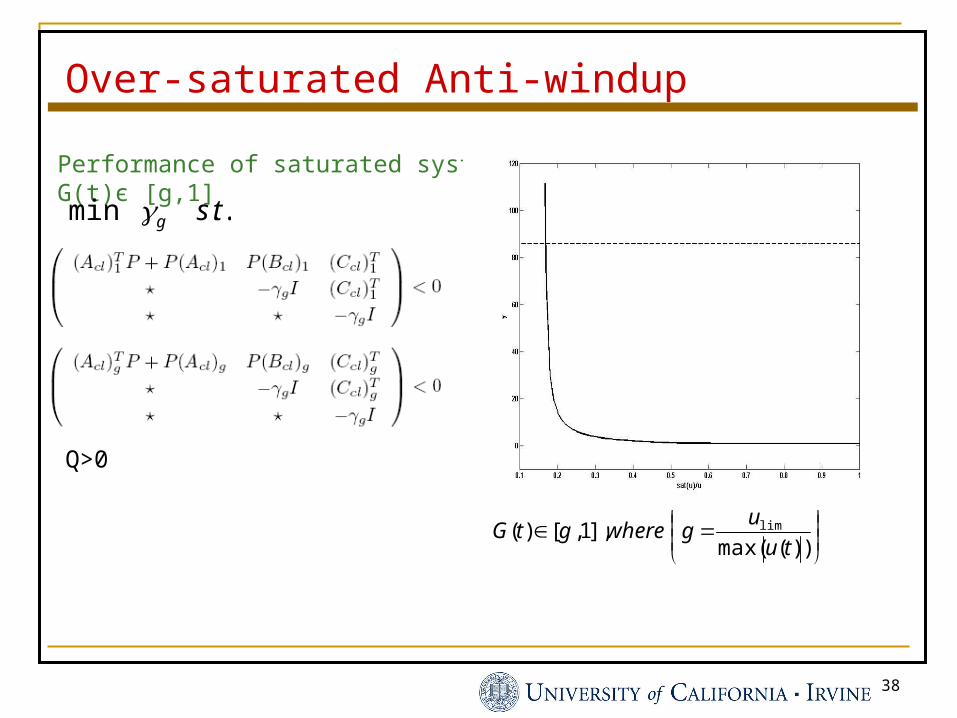
Example (Over-saturated Anti-windup
System response: Unconstrained Nominal, Anti-windup, Unconstrained Nominal
45
Example (Over-saturated Anti-windup)System response: Anti-windup, Over-saturated Anti-Windup, Unconstrained Nominal
46
Summary
• Tradeoff between `matched uncertainty’ vs better performance guarantee
•Dynamic Anti-windup case: Reasonably straight forward: the uncertainly is of the LPV (self-scheduled) variety – constant Lyapunov functions suffice
•Combine `over saturation’ and scheduling is next!












































![Gradient Projection Anti-windup Schemeacl.mit.edu/papers/TeoMITScD11_slides.pdf · Anti-windup compensation preferred by practitioners due to [Tarbouriech and Turner 2009]: design](https://static.documents.pub/doc/80x56/5e68b329f4588a230c048523/gradient-projection-anti-windup-anti-windup-compensation-preferred-by-practitioners.jpg)












