1 Towards A Holistic Approach for System Design in Sensor Networks Chair: Prof. Nael Abu-Ghazaleh Committee Members: Prof. Kenneth Chiu Dr. Tony Fountain Prof. Wendi Heinzelman Prof. Kyoung-Don Kang Prof. Michael Lewis Sameer Tilak
Transcript
1
Towards A Holistic Approach for System Design in Sensor Networks
Chair: Prof. Nael Abu-Ghazaleh
Committee Members: Prof. Kenneth ChiuDr. Tony FountainProf. Wendi HeinzelmanProf. Kyoung-Don KangProf. Michael Lewis
Sameer Tilak
2
Outline
WSN Applications and Challenges Summary of Contributions Holistic Principle WSN critical Subsystems and Services Holistic Framework Architecture Abstractions and Virtualization Conclusion and Future Work
3
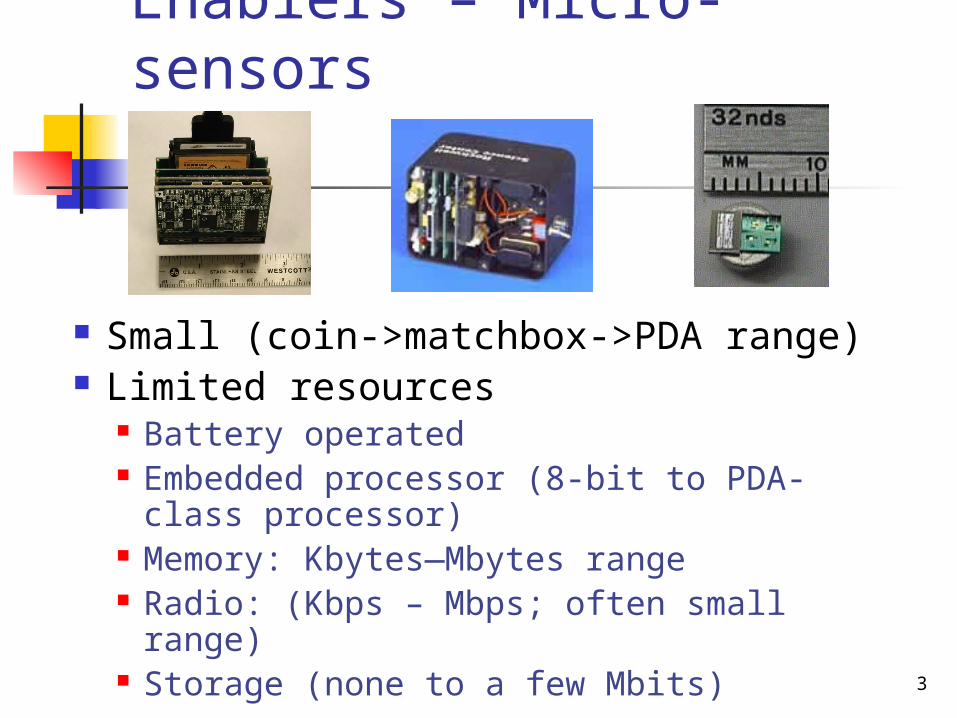
Enablers – Micro-sensors
Small (coin->matchbox->PDA range) Limited resources
Battery operated Embedded processor (8-bit to PDA-class
processor) Memory: Kbytes—Mbytes range Radio: (Kbps – Mbps; often small range) Storage (none to a few Mbits)
4
Sensor Network Applications
EmbedEmbed numerous distributed devices to monitor and interact with physical world: hospitals, homes, vehicles, and “the environment”
Network these devices so that they can coordinate to perform higher-level tasks.Requires robust distributed systems of hundreds or thousands of devices.
Disaster Response
5
Sensor Node Specific Challenges
Low Battery power Low bandwidth Error-prone air medium Low computing power and memory Heterogeneous software and
Hardware architectures
6
Sensor Network Challenges
Large-scale fine-grained heterogeneous sensing 100s to 1000s of nodes providing high resolution Spaced a few feet to 10s of meters apart
Collaborative Each sensor has a limited view
Spatially In terms of sensed data type
Distributed Communication is expensive Localized decisions and data fusion necessary
7
Summary of Contributions
WSN critical subsystems and services Information dissemination Storage Management Localization
Holistic Framework Abstraction and virtualization
8
Holistic Principle Data centric, resource constrained operation
effective operation requires careful balancing of application level utility and cost (Principle 1)
Communication is expensive Localized interactions -- produce local estimates
of utility and cost (Principle 2) Local estimates of application level utility
and cost can significantly differ from actual value observed globally Information available globally that significantly
impacts local estimates are called context Identify and track context when it is worth it to do
so (Principle 3)
9
Non-Uniform Information Dissemination
WSN Critical Subsystems/Services
ICNP 2003, NCA 2004, NCA 2005, TR
10
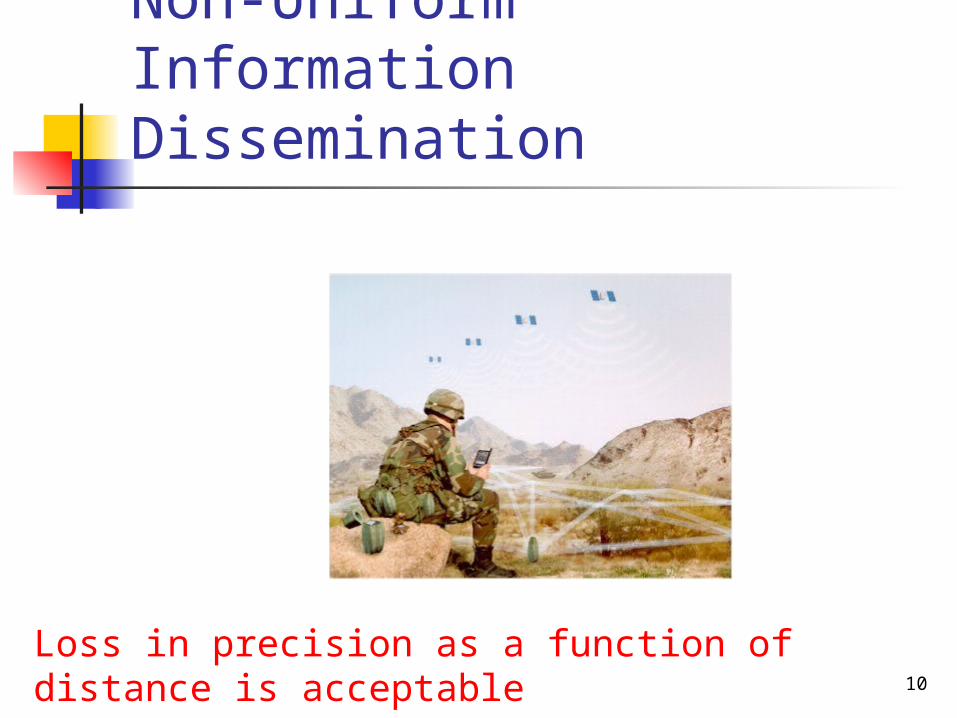
Non-Uniform Information Dissemination
Loss in precision as a function of distance is acceptable
11
Intuition Forward packets less aggressively the further
away you are from the event deterministically: e.g., forward every nth packet, n
increase with distance probabilistically: e.g., forward packets with a
probability thatdrops with distance from event
Here, the context is spatial and can be efficiently tracked by tracking the distance from the source on the event packet
Significant energy saving results, while keeping information accurate close to the event source
12
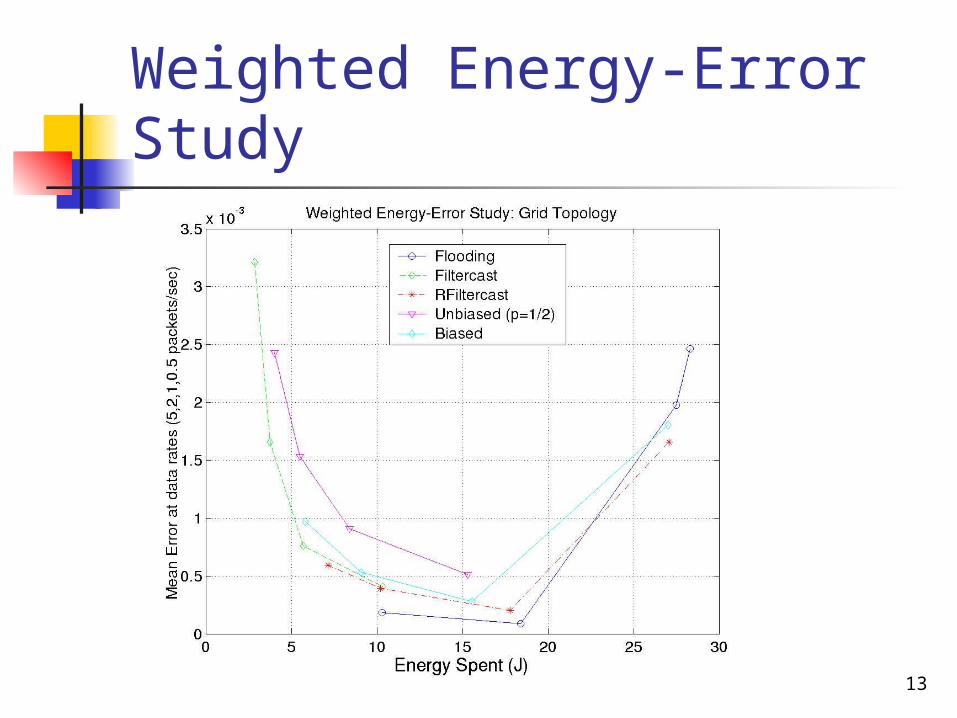
Randomized Protocols
Biased protocol: Packet forwarding decisions are
based on a coin toss and relative distance from source.
Forwarding probability is higher for physically closer sources. (Context)
Simple, low overhead and very scalable
13
Weighted Energy-Error Study
14
High-level concluding remarks
Energy-efficient light-weight protocols that capitalize on non-uniform information granularity
Context embedded in the form of TTL (distance from an event source).
15
WSN Critical Subsystems/Services
Storage Management
IJAHUC 2005, Wiley Book chapter 2005, TR
16
Intuition
Exploit spatio-temporal redundancy
Coordinate for redundancy control Context is Spatial
17
Candidate Protocols
Local Storage Local-Buffer
Clustering CBCS: Aggregate and Store and Cluster
Head Context:
CLS: Coordinate and store locally CCS: Combined CBCS + CLS
18
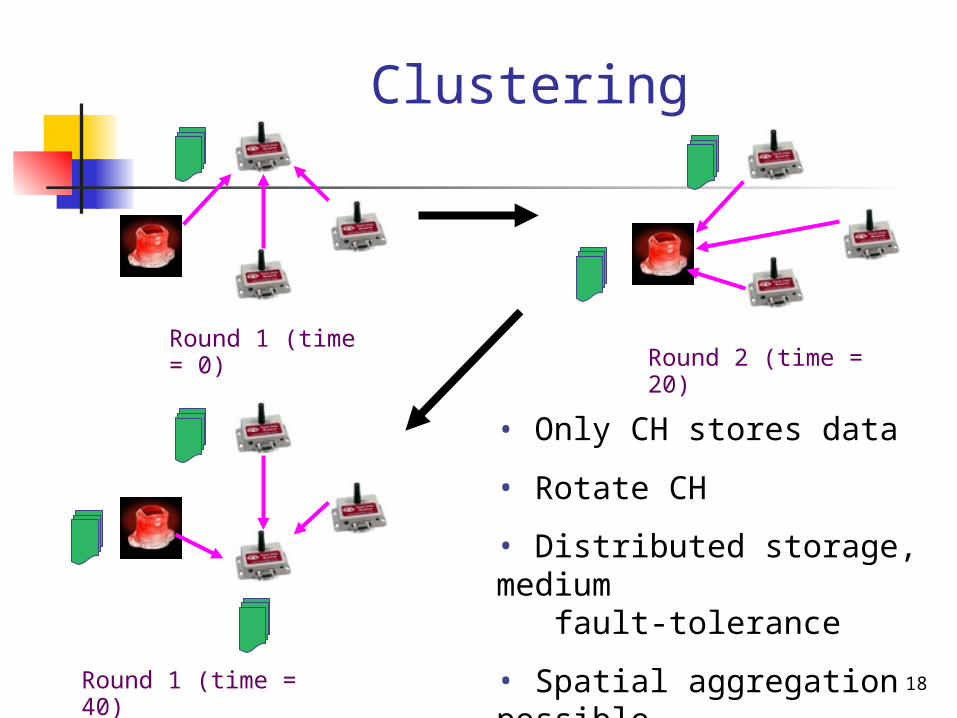
Clustering
• Only CH stores data
• Rotate CH
• Distributed storage, medium fault-tolerance
• Spatial aggregation possible
Round 1 (time = 0)Round 2 (time = 20)
Round 1 (time = 40)
19
CCS
Round 1 (time = 0)
Round 1 (time = 40)
Feedback
Data
CH
Feedback provides context for data utility
CH has more global view than individual sensor
Samples
20
Storage and Energy Study
21
High-level concluding remarks
Collaborative protocols are scalable, light-weight, does load balancing and increase storage lifetime
Context provided in terms of feedback for redundancy control
Context in space
22
Localization
IEEE IWSEEASN 2005
WSN Critical Subsystems/Services
23
Mobile Sensor Localization
Localization: Determine physical coordinates of a given sensor
Existing research considers static sensor nets.
Mobile sensors Energy versus accuracy trade-offsProtocols
Assumes Static Sensor Network Focus on How to Carry Localization and not
When Range/Direction Based
Calculate distance from anchors and triangulate Received Signal Strength (e.g. RADAR) Time of Arrival (e.g. GPS) Time Difference of Arrival (Cricket, Bat) ProximityBased
Centroid ATIP DV HOPS MDS
25
Motivation
What about Mobile Sensor Networks ?Interesting Energy-Accuracy trade off !
26
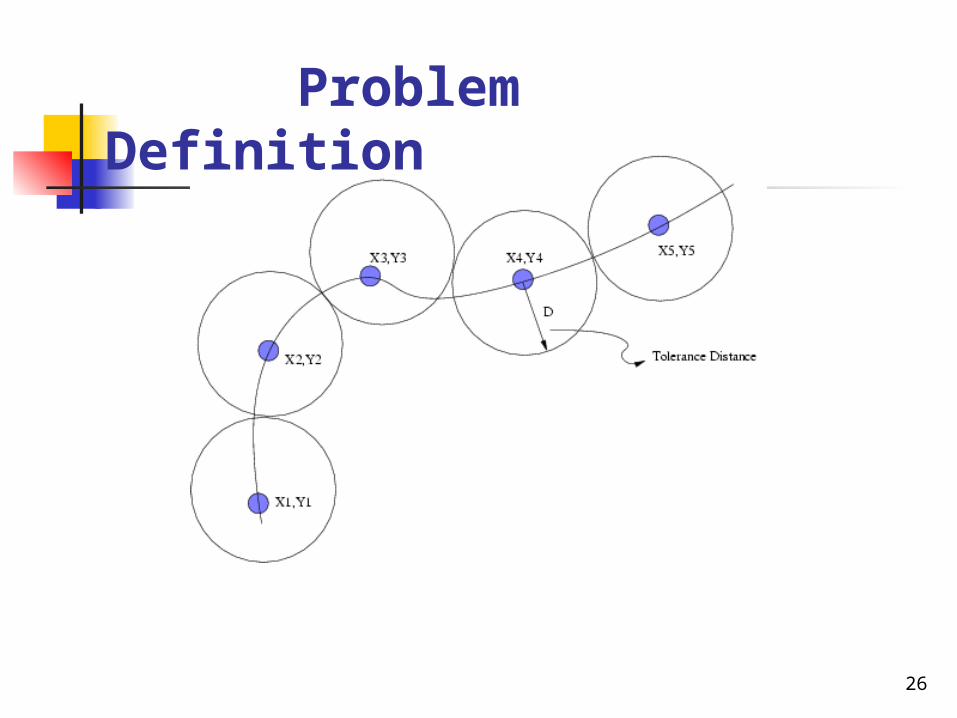
Problem Definition
27
SFR Localize every t seconds Very simple to implement Once Localize tag data with those
coordinates till next localization Energy expenditure independent of
Mobility Performance varies with Mobility Existing Projects such as Zebranet use
this approach (3 minutes).
28
DVM Adaptive Protocol Sensor Adapts its localization frequency to
Mobility Goal maintain error under application-specific
tolerance Compute current velocity and use it to decide
next localization period Once Localize tag data with those coordinates
till next localization Upper and Lower query threshold Energy expenditure varies with Mobility Performance almost invariant of Mobility
29
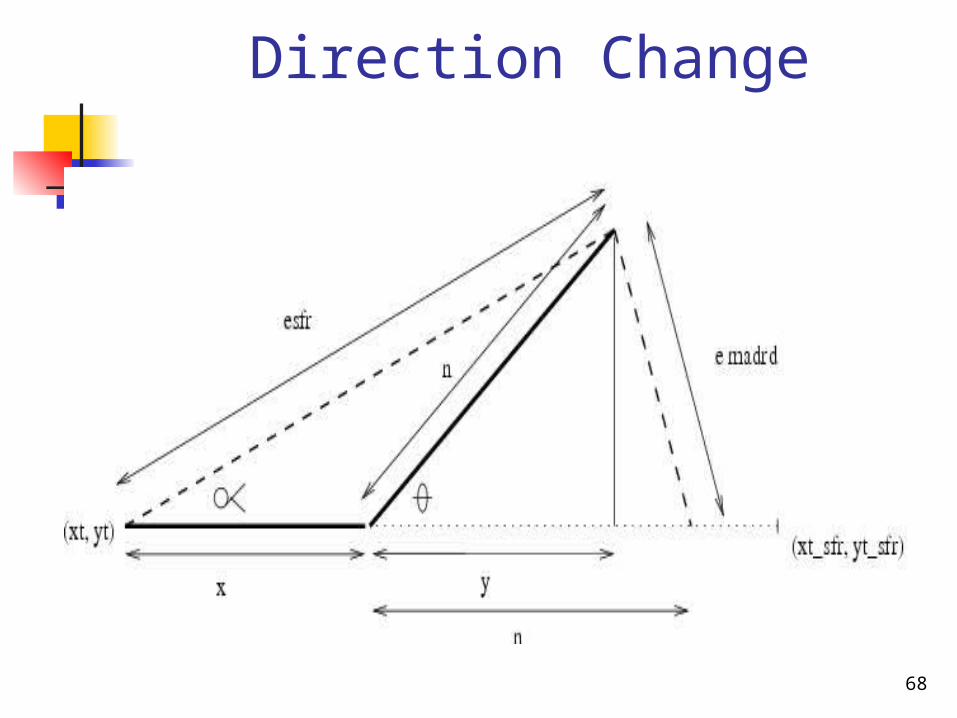
MADRD Predictive Protocol Estimate mobility pattern and use it to predict
future localization Localization triggered when actual mobility and
predicted mobility differs by application-specific tolerance
Tag data with predicted coordinates (differs from SFR and DVM)
Changes in mobility model affect the performance
Upper and Lower query threshold Energy expenditure varies with Mobility Performance almost invariant of Mobility
30
MADRD State Diagram
31
High-level Summary of Analysis
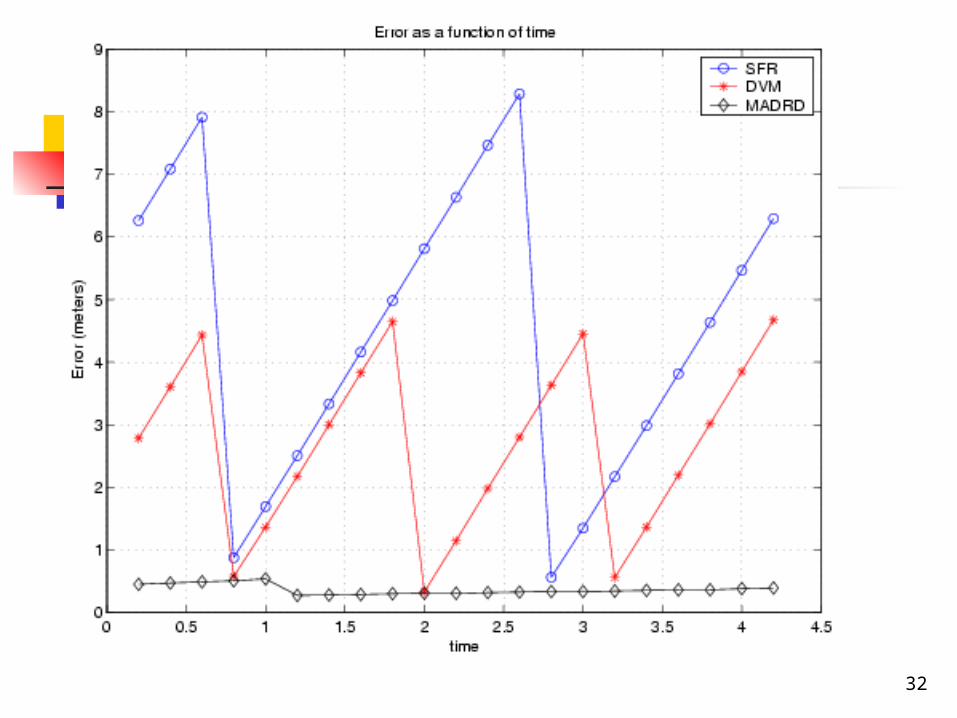
Error in non-predictive protocols increase with any mobility that moves the node away from its last localization point
Error in Predictive protocols increase only when the predictive
Model is inaccurate Model estimation in incorrect Model changes (pause, direction change)
32
33
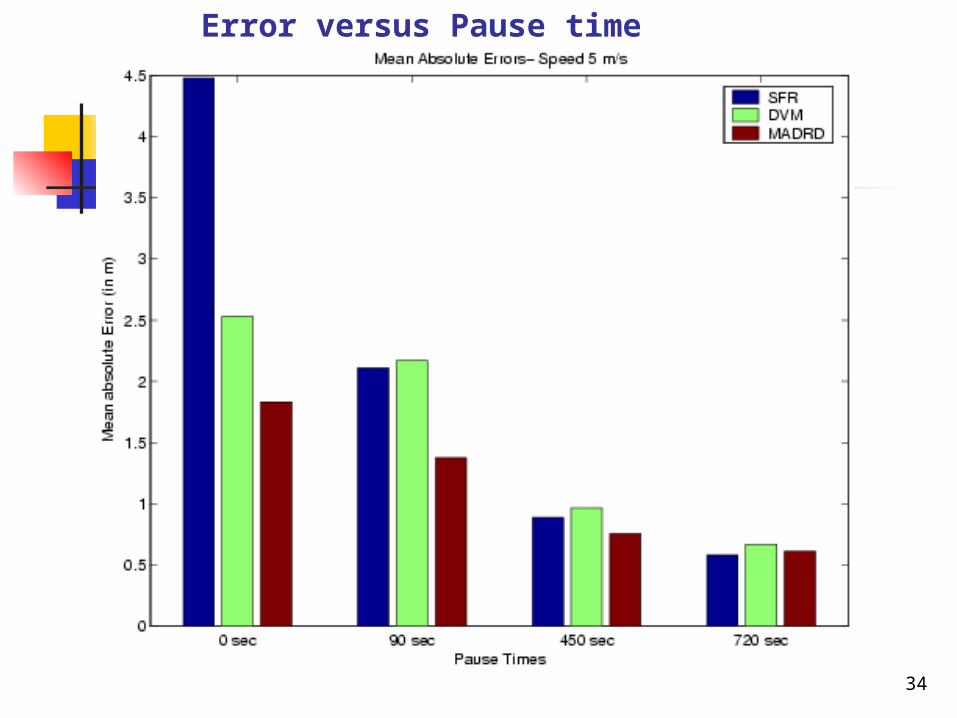
Medium Speed (4-5 m/s)
34
Error versus Pause time
35
Summary
Studied energy versus accuracy tradeoff in localization for mobile sensors
DVM and MARD are completely distributed scalable protocols DVM and MADRD outperform SFR Context Temporal
36
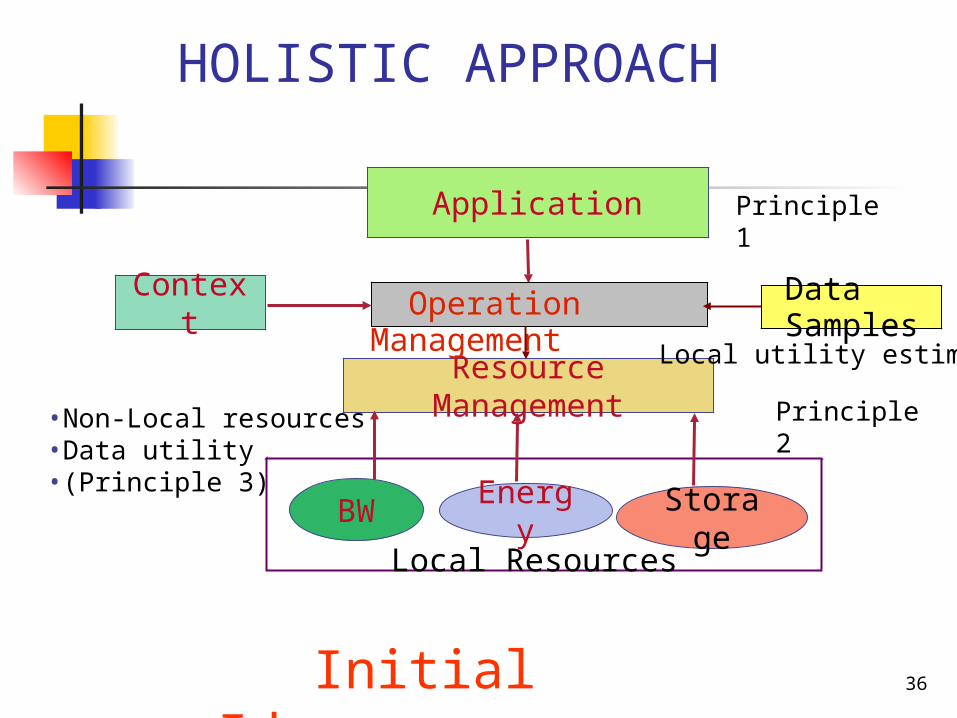
Resource Management
BW Storage
Energy
Context
Application
Local Resources
•Non-Local resources•Data utility•(Principle 3)
HOLISTIC APPROACH
Operation Management Data Samples
Local utility estimate
Principle 1
Principle 2
Initial Idea
37
Context
Localized decisions leads to scalability Local estimate of utility of data can
differ from global measurement Absence of relevant global knowledge:
Context Feedback can be used to improve
accuracy of local estimate
38
Patterns & Types Context
Patterns Context in time Context in space Application-specific (domain
knowledge) Resource related (src-dest path)
Types Utility context Cost context
39
Research Challenges
Data Utility Assessment Resource Cost Assignment Utility-Cost Normalization Tracking, Building, and Maintaining
Context Middleware
40
Holistic Framework Architecture
Point in design space
41
Holistic Framework Components
Benefit Estimator Cost Calculator Planner
42
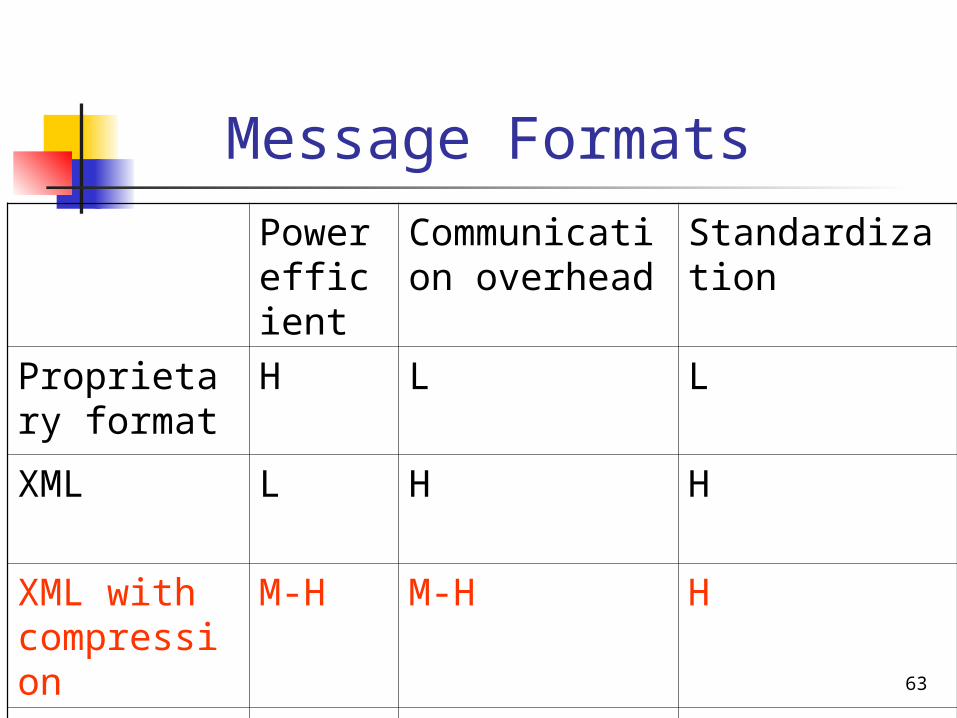
Benefit Estimator
Data Significance Data scope in Time, Space App-specific (observer interest)
Data Quality Data Freshness, accuracy, resolution, App-specific measures
























































![2012-07-26 (2) - GMPC · Tala]Abu-Ghazaleh & Co.International Member ofTala!Abu-Ghazaleh Organization TheArabOrganization forGlobalProfessional Services Serving you from over 71 offices](https://static.documents.pub/doc/80x56/5fc84dff341cfa588a7452b1/2012-07-26-2-gmpc-talaabu-ghazaleh-cointernational-member-oftalaabu-ghazaleh.jpg)

