OverviewDebuggers need to understand the system they are debugging.
___Putting the descriptions in data files provides flexibility.
___Using an open, standard, format for such data files allows the
files to be created by SoC designers and shared between tools.___
SPIRIT is an open standard that can describe systems at the appropriate level of detail.
___ARM will be using SPIRIT in its debug tools, and promoting its
wider use in debug tools.
333
The problem Embedded systems used to be reasonably simple. e.g.:
1 processor
1 system bus
Etc.
Telling the debugger about such systems was reasonably simple.
Now: Many processors
Many busses
Complex memory maps
So how do we debug complex systems? We need the ability to debug all the processors, and to trace all the
processors and busses
444
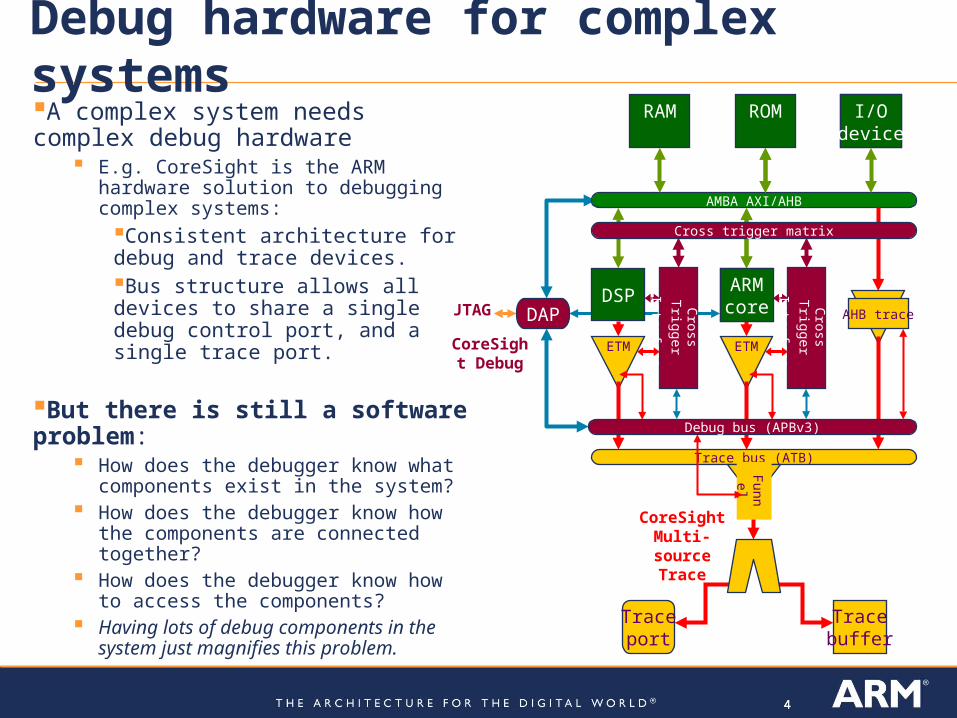
Debug hardware for complex systemsA complex system needs complex debug hardware
E.g. CoreSight is the ARM hardware solution to debugging complex systems:Consistent architecture for debug and trace devices.Bus structure allows all devices to share a single debug control port, and a single trace port.
But there is still a software problem:
How does the debugger know what components exist in the system?
How does the debugger know how the components are connected together?
How does the debugger know how to access the components?
Having lots of debug components in the system just magnifies this problem.
ARMcore
DSP
AMBA AXI/AHB
AHB trace
Cross
Trigger
Interface
Cross
Trigger
Interface
DAP
CoreSight Debug
ETM ETM
Tracebuffer
Trace bus (ATB)
Traceport
Funnel
CoreSight Multi-source
Trace
JTAG
Debug bus (APBv3)
RAM ROM I/Odevice
ARMcore
I/Odevice
Cross trigger matrix
555
Cross
Trigger
Interface
Cross
Trigger
Interface
ARMcore
What does the debugger need to know? Programmers’ model:
System components
System busses
Base addresses
Device registers
Debug access description: Debug access to processors
Other debug devices
Debug interconnections
DSP
AMBA AXI/AHB
AHB traceDAP
ETM ETM
Tracebuffer
Trace bus (ATB)
Traceport
Funnel
JTAG
Debug bus (APBv3)
RAM ROM I/Odevice
Cross trigger matrix
0x10000000 0x0 0x30000000
Reg 1
666
Data driven debugger configuration With a large range of such complex systems it becomes
impractical to explicitly build support of each system into the debugging tools.
Far better to build in support of the individual components, and to use a data file to describe the system
If the data file format is open then SoC designers or debugger users can create their own descriptions of new SoC
Ideally multiple tools, even from different vendors, should be able to read the same data files.
777
SPIRIT and debugger configuration A SPIRIT system description can contain the information the debugger
needs: Component list. Component interconnection. Physical address maps. Some extra usage conventions (e.g. names of debug interfaces) needed:
Under development by ARM, will be made publicly available.
Open standard, so the same descriptions can potentially be used by many tools. Including ARM and non-ARM debug tools.
Reasonably simple XML format. Hierarchical designs supported:
This allows separate subsystems to be described independently.
Standard SoC design tools are starting to support the creation and use of SPIRIT descriptions: Hence the SPIRIT description can be easily generated during SoC design.
888
Typical data flows
ETMCS for Tiger
DAP for Tiger
AHB TraceFunnel
ETBCS
EDA/ESL Tools
Component I/O and memory map information
as a SPIRIT XML File
ETMCS for Tiger
DAP for Tiger
AHB TraceFunnel
ETBCSIP Components
Other topology tools:
• Manual file generation
• Proprietary tools
• Autodetect from SoC
Emulator
ETMCSDAP
AHB Trace
Funnel ETBCS
DSP
Topology and System Memory Map Description
as SPIRIT XML
Reads debug access descriptions from SPIRIT
files
DebuggerReads programmers’ model from SPIRIT
files
IP ve
ndorS
ystem
designer
Softw
are
developer
999
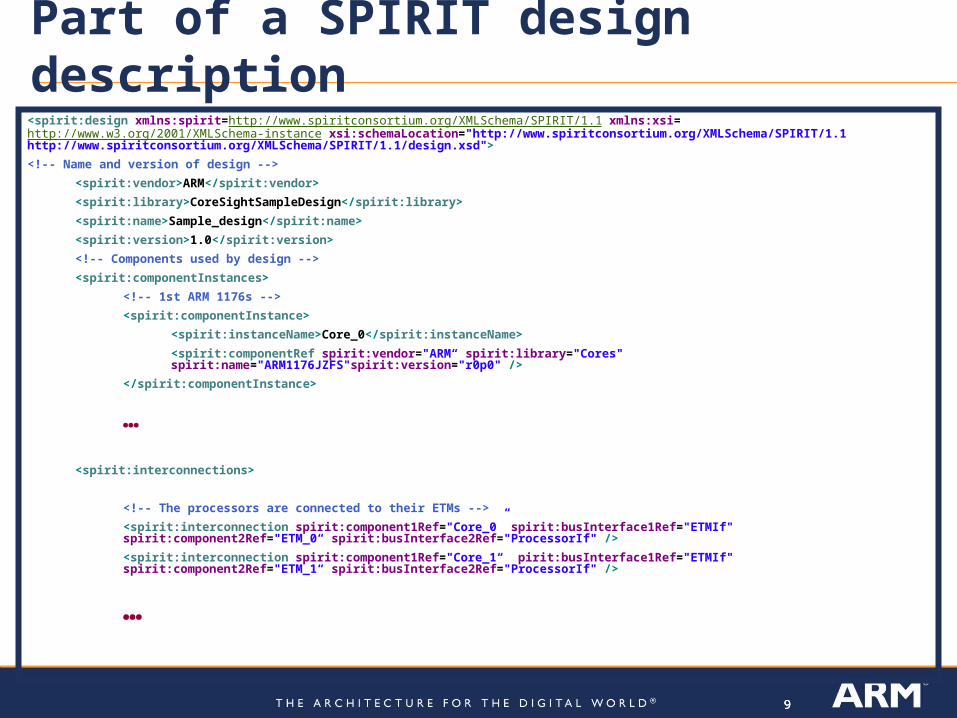
Part of a SPIRIT design description<spirit:design xmlns:spirit=http://www.spiritconsortium.org/XMLSchema/SPIRIT/1.1 xmlns:xsi=http://www.w3.org/2001/XMLSchema-instance xsi:schemaLocation="http://www.spiritconsortium.org/XMLSchema/SPIRIT/1.1 http://www.spiritconsortium.org/XMLSchema/SPIRIT/1.1/design.xsd">
SPIRIT for debug standardization SPIRIT, in its current form, is useful for debug. SPIRIT consortium steering committee looking at future
activities: Extension of scope to include software debug likely. The main effect of this will be to allow consideration of debug
requirements in future extensions to SPIRIT.
Possible areas for extensions to SPIRIT to improve debug support (none yet proposed to SPIRIT consortium): Description of non-memory-mapped registers (e.g. co-processor
registers or internal processor registers). SPIRIT already supports some description of internal registers for
hardware validation. This could possibly be extended to provide descriptions suitable for software debug.
Description of interrupt structure. Explicit tagging of interfaces used for debug control
121212
SPIRIT and ARM SPIRIT descriptions are being developed for ARM IP:
Including processors, CoreSight components, busses.
ARM EDA tools support SPIRIT
ARM is a leading participant in SPIRIT consortium.
131313
Conclusions SPIRIT provides a vendor independent way of describing
complex systems.
SPIRIT descriptions can contain the data needed to allow such systems to be debugged.
Adoption of SPIRIT descriptions for debug will allow easy multi-sourcing of both components and debug tools
ARM is developing support of SPIRIT in their debug tools, and is leading discussion within the industry on the potential use of SPIRIT as an open standard for debug target description