51
1540 Introduction To Mechatronics 1 Stefan Williams Introduction to Mechatronics Mech-1540 Stefan B. Williams Federation Research Fellow
| Date post: | 03-Apr-2018 |
| Category: |
Documents |
| Upload: | felipe-avila-salgado |
| View: | 218 times |
| Download: | 0 times |

7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 1/51
1540 Introduction To Mechatronics 1Stefan Williams
Introduction to MechatronicsMech-1540
Stefan B. Williams
Federation Research Fellow
7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 2/51
1540 Introduction To Mechatronics 2Stefan Williams
Lecture Schedule
• Course Information
– How to contact lecturers and tutors
– How to get information about this course
– What this course will contain
– The schedule of events – Assignments, tutorials, examinations
– What is expected from students
• What is Mechatronics?
• Some examples of Mechatronic Systems

7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 3/51
1540 Introduction To Mechatronics 3Stefan Williams
Course Information
• All course information is available via the
ACFR web site on:
• http://www.acfr.usyd.edu.au --
Teaching/Undergraduate/Mechatronics 1540
• Lecture slides and assignments will beposted during the week

7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 4/51
1540 Introduction To Mechatronics 4Stefan Williams
Contact
• Stefan Williams:
– Research Associate of Mechatronic Engineering
– Australian Centre for Field Robotics
• How to see me:
– Thursday 0900-1100
– Do not attempt to turn up at my office !
• Make an appointment: – E-mail: [email protected]
– Web: www.acfr.usyd.edu.au - people
– Phone: [935]-14023
7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 5/51
1540 Introduction To Mechatronics 5Stefan Williams
Contact Tutors:
• Tutors only available at tutorial times and at
the end of lecture sessions• Most tutors live in ACFR Building
• Tutor contact information on web page• www.acfr.usyd.edu.au -- people
• See policy document on admission to ACFR
building: www.acfr.usyd.edu -- contact us
7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 6/51
1540 Introduction To Mechatronics 6Stefan Williams
Course Objectives
• To provide a general introduction tomechatronic principles:
– Systems
– Control
– Computing
– Sensors
– Actuators
7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 7/51
1540 Introduction To Mechatronics 7Stefan Williams
Course Outcomes
• A broad appreciation of mechatronics for both
mechatronic and mechanical engineers
• An understanding of the main components of a
mechatronic system and how they fit together
• A knowledge of what is ‘out there’ and whatmight be possible
• Not a detailed knowledge of computers or sensors or actuators
7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 8/51
1540 Introduction To Mechatronics 8Stefan Williams
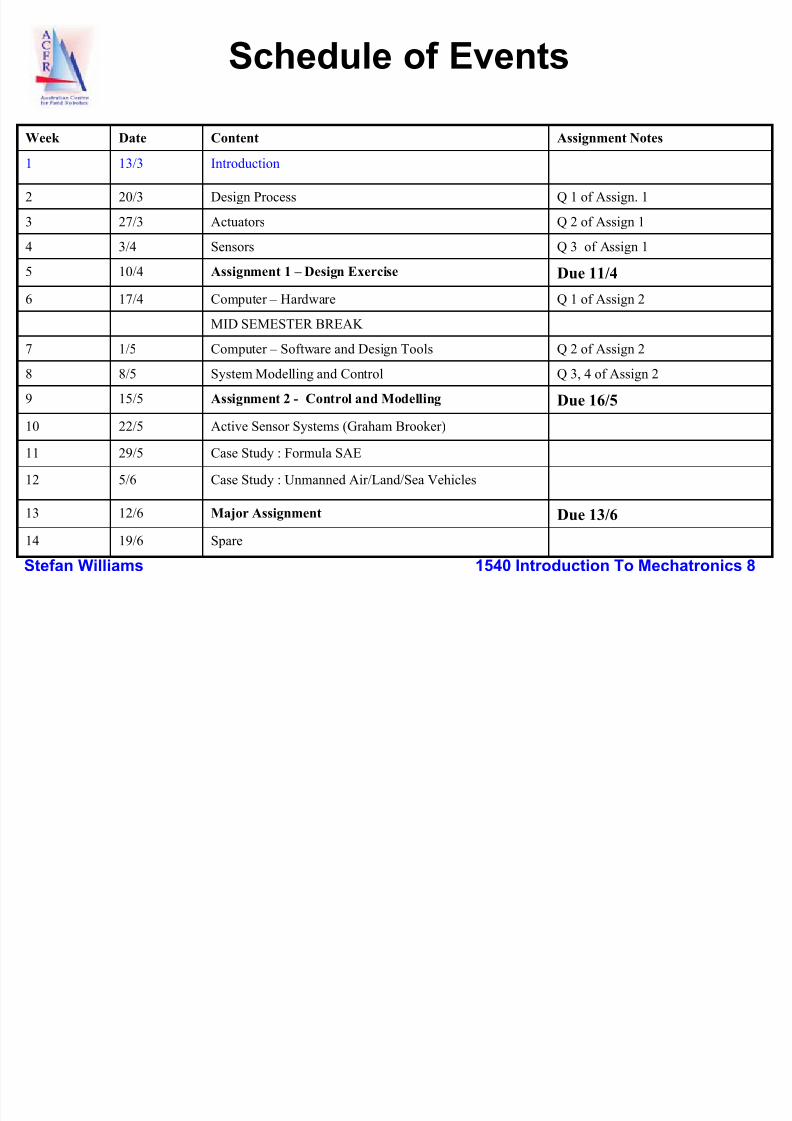
Schedule of Events
MID SEMESTER BREAK
Spare19/614Due 13/6Major Assignment12/613
Case Study : Unmanned Air/Land/Sea Vehicles5/612
Case Study : Formula SAE29/511
Active Sensor Systems (Graham Brooker)22/510
Due 16/5Assignment 2 - Control and Modelling15/59
Q 3, 4 of Assign 2System Modelling and Control8/58
Q 2 of Assign 2Computer – Software and Design Tools1/57
6
5
4
3
2
1
Week
17/4
10/4
3/4
27/3
20/3
13/3
Date
Computer – Hardware
Assignment 1 – Design Exercise
Sensors
Actuators
Design Process
Introduction
Content
Q 1 of Assign 2
Due 11/4
Q 3 of Assign 1
Q 2 of Assign 1
Q 1 of Assign. 1
Assignment Notes
7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 9/51
1540 Introduction To Mechatronics 9Stefan Williams
Assignments/Tutorials
• Attendance
– Worth 10% - I’ll pass around a list to be
initialled during the lectures• Tutorials
– Worth 20% each
– Require 2-4 hours outside tutorial – Due date adhered to !
• Major Assignment:
– A Design and Analysis Exercise – Worth 50%
– Requires 8-12 hours outside tutorial
– Strict due date

7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 10/51
1540 Introduction To Mechatronics 10Stefan Williams
What I expect from you
• Lectures
– Turn up (hence the attendance marks)
– Ask (sensible) questions as much as you like
– Take an interest in the material being presented
• Tutorials: – Work on questions before tutorials
– Use tutorials to clarify and enhance
– Assignments to be submitted on time

7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 11/51
1540 Introduction To Mechatronics 11Stefan Williams
Mechanical
What is Mechatronics?
• An interdisciplinaryarea of specialization
involving thesimultaneousapplication of mechanical,electrical, controland computer engineeringprinciples together with computer software indesigning useful
systems
ControlElectrical
Computing

7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 12/51
1540 Introduction To Mechatronics 12Stefan Williams
What courses relate to Mechatronics?
• Mechanical
– Statics
– Advanced Dynamics – Dynamics of Vibration
– Mechanical Design
• Electrical – Introduction to Electical
Engineering
– Digital Design *
– Electronics *
– Power Electronics *
• Control
– Systems Control
– Advanced Control• Computing
– Introduction to C
Programming * – Real Time Systems
• Mechatronics – Intro. To Mechatronics
– Mechatronics 1 *
– Mechatronics 2 *

7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 13/51
1540 Introduction To Mechatronics 13Stefan Williams
Mechatronic Components
Decision Process
• System Models
• Control
ActuatorsSensors
REAL WORLD
Time Scales
Degree of FlexibilityComplexity of Decisions
Costs

7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 14/51
1540 Introduction To Mechatronics 14Stefan Williams
Model of a Mechatronic System
Environment
Sensors
ActuatorsSignal Capture
Control
Mechanical
System Disturbances
Noise
Desired SystemPerformance
7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 15/51
1540 Introduction To Mechatronics 15Stefan Williams
Examples : The CD Player
• A CD player is an example
of a mechatronic system
• Requires – Accurate positioning of the
laser read head
– Precise control of mediaspeed
– Conversion of digital data
to analogue signal

7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 16/51
1540 Introduction To Mechatronics 16Stefan Williams
Examples : Hard Drive
• A computer disk drive is
another example of a
rotary mechatronicsystem
• Requires
– Accurate positioning of the magnetic read head
– Precise control of media
speed – Extraction of digital data
from magnetic media
7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 17/51
1540 Introduction To Mechatronics 17Stefan Williams
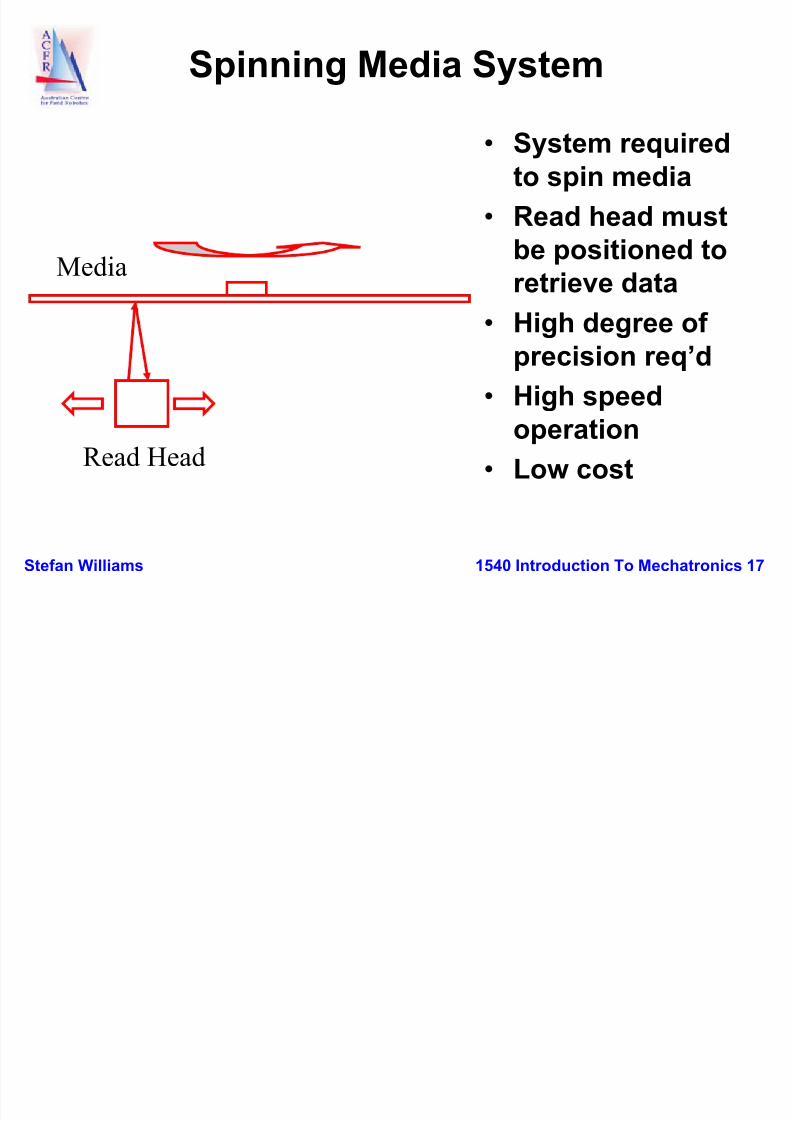
Spinning Media System
• System required
to spin media
• Read head mustbe positioned to
retrieve data
• High degree of precision req’d
• High speed
operation
• Low cost
Media
Read Head

7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 18/51
1540 Introduction To Mechatronics 18Stefan Williams
Examples : Modern
Automobiles
• Modern Automobiles arecontrolled by a number of computer
components• Requires
– Control of automobilesub systems
• Brakes and acceleration
• Cruise control
• ABS
• Climate control
• GPS
– Reliability
– Low cost
– Ease of use

7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 19/51
1540 Introduction To Mechatronics 19Stefan Williams
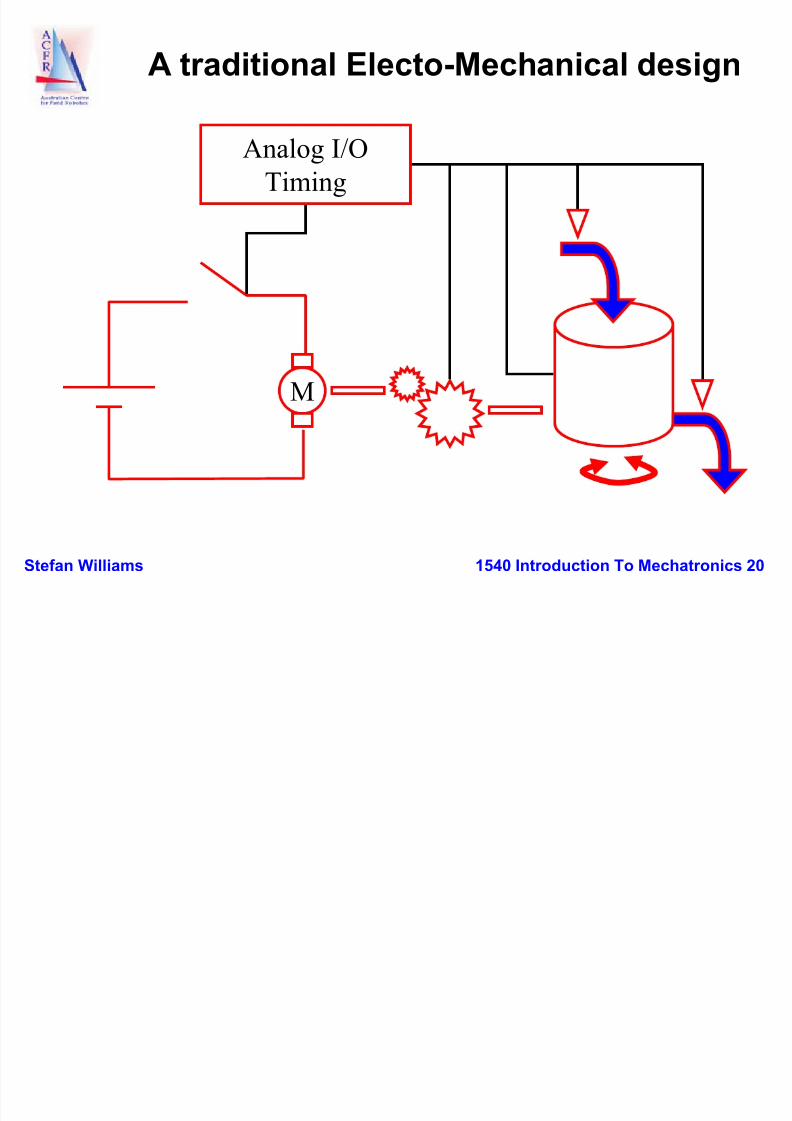
Examples : Washing Machine
• System Requirements – Understanding of load sizes
– Receptacle to hold clothes
– ‘Plumbing’ – Agitation of drum
– Ease of use
– Reliability
– Low Cost• Actuators
– AC or DC Motors
– Water inlet/drain
• Sensors – Water level
– Load speed/balance
• Control – Choice depends on design
7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 20/51
1540 Introduction To Mechatronics 20Stefan Williams
A traditional Electo-Mechanical design
M
Analog I/O
Timing

7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 21/51
1540 Introduction To Mechatronics 21Stefan Williams
A Mechatronic design
M
Micro Processor
Amp.
7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 22/51
1540 Introduction To Mechatronics 22Stefan Williams
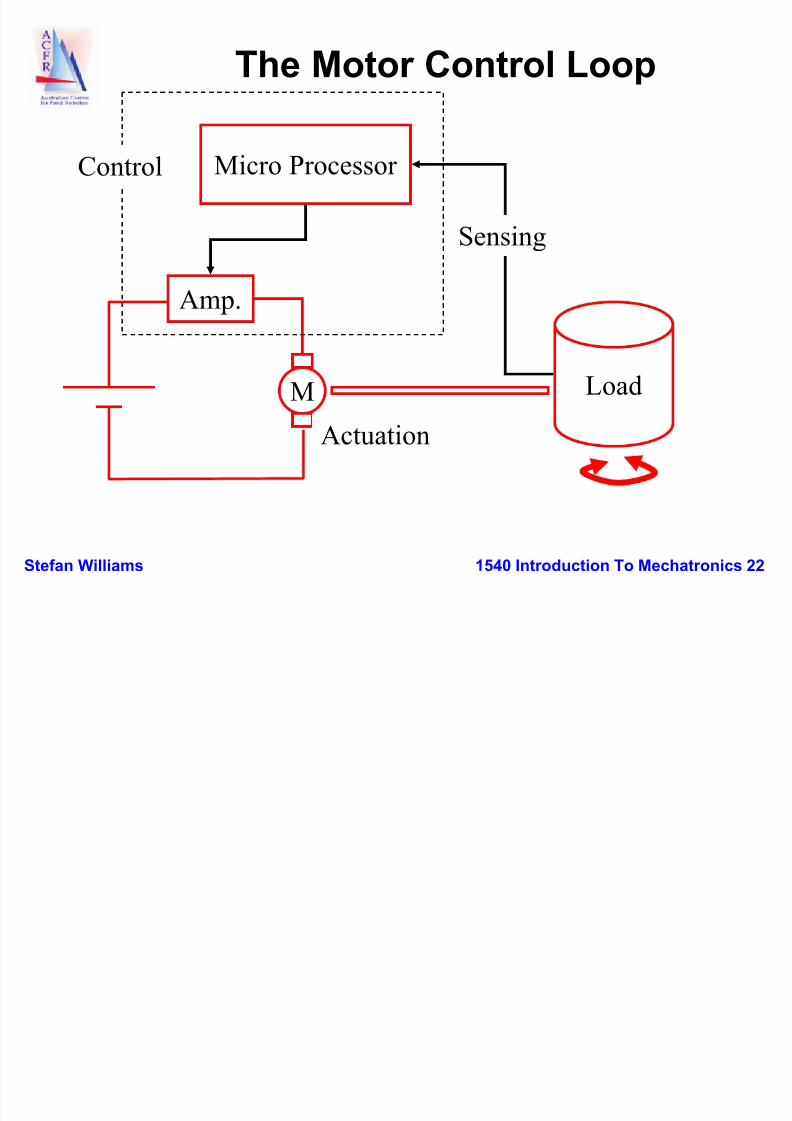
The Motor Control Loop
M Load
Micro Processor
Amp.
Sensing
Actuation
Control

7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 23/51
1540 Introduction To Mechatronics 23Stefan Williams
Actuators:Types
• DC Servos
• AC Servos
• Stepper Motors
• Piezo
• Hydro static• Pneumatic
• Hydraulic

7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 24/51
1540 Introduction To Mechatronics 24Stefan Williams
Actuators: Main Issues
• Power
• Speed
• Torque/Force
• Speed of response• Ripple/noise
• Resolution• Friction/backlash
7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 25/51
1540 Introduction To Mechatronics 25Stefan Williams
Sensors
• Physical Transduction Methods
• Signal Conditioning
• Signal Conversion
Sensors Ph sical

7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 26/51
1540 Introduction To Mechatronics 26Stefan Williams
Sensors: Physical
Transduction Methods
• Mechanical
• Electro-Magnetic
• Optical
• Thermal
• Acoustic

7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 27/51
1540 Introduction To Mechatronics 27Stefan Williams
Sensors: Signal Conditioning
• Amplification
• Noise suppression
• Filtering
• Shock and environment
7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 28/51
1540 Introduction To Mechatronics 28Stefan Williams
Sensors: Conversion
• Analogue-digital conversion (sampling)• Signal frequency (sample rate)
• Aliasing
• Memory and processing cycles
• Signal processing algorithms
7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 29/51
1540 Introduction To Mechatronics 29Stefan Williams
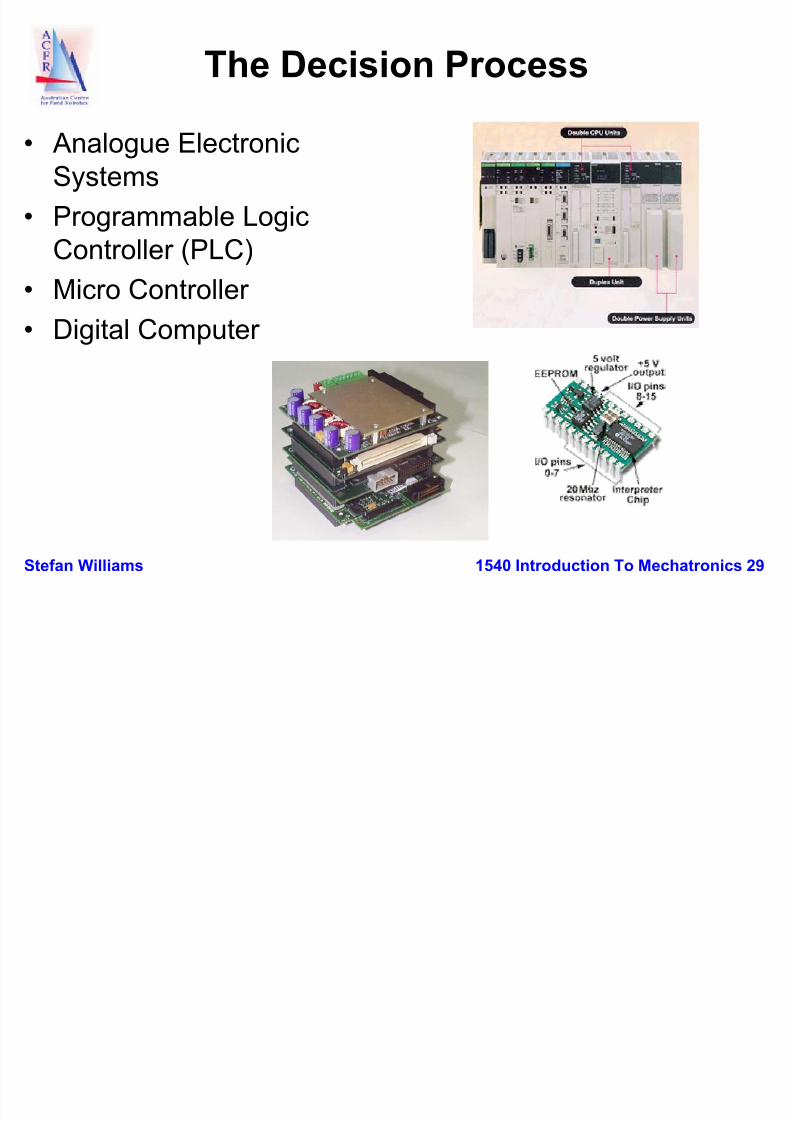
The Decision Process
• Analogue Electronic
Systems
• Programmable LogicController (PLC)
• Micro Controller
• Digital Computer

7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 30/51
1540 Introduction To Mechatronics 30Stefan Williams
Pay-Offs
• Complexity
• Speed
• Reliability
• Cost• Flexibility
System Modelling With

7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 31/51
1540 Introduction To Mechatronics 31Stefan Williams
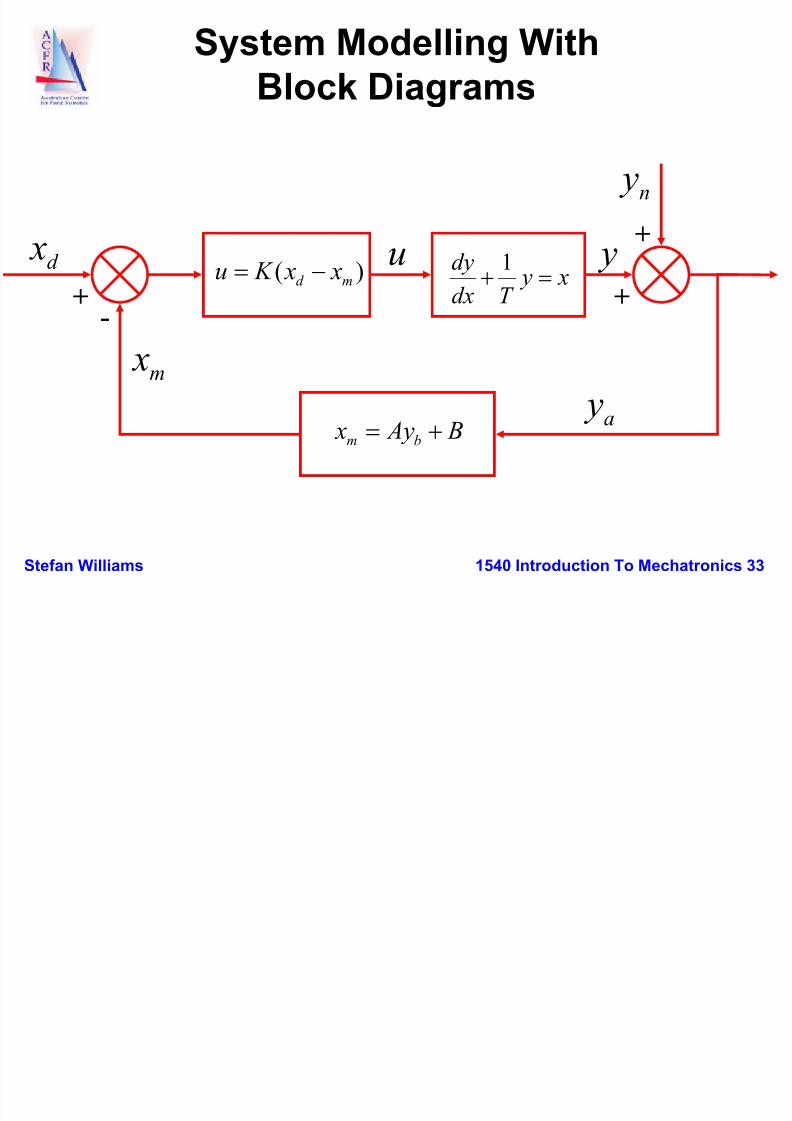
System Modelling With
Block Diagrams
• A block diagram describes system structure• A block diagram describes the mathematics used
to model the system• A block diagram can be used to understand the
system both physically and mathematically
System Modelling With

7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 32/51
1540 Introduction To Mechatronics 32Stefan Williams
System Modelling With
Block Diagrams
Motor/Load
Dynamics
VelocityMeasurement
Controller,
Amplifier
Desired
Velocity
ActualVelocity
Measured
Velocity
Load
Disturbance
+
+ +
-
Voltages ?
System Modelling With
7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 33/51
1540 Introduction To Mechatronics 33Stefan Williams
System Modelling With
Block Diagrams
+
+ +
-
1dy y x
dx T + =
u( )d mu K x x= −
d x y
m x
a y
n y
m b x Ay B= +
System Modelling With

7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 34/51
1540 Introduction To Mechatronics 34Stefan Williams
System Modelling With
Block Diagrams
Transfer
Function
Input Output
A “gain”
Differential Equation
Logic Condition
Look-up Table

7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 35/51
1540 Introduction To Mechatronics 35Stefan Williams
A State Machine Analysis
• A conceptual understanding of procedure
• A method for structuring system andsoftware
• Well defined system states and transfer events

7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 36/51
Th R St t

7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 37/51
1540 Introduction To Mechatronics 37Stefan Williams
The Run State
Empty
Wash
FillDone
Ready
SpinRinse
Stop
FailFail
Fl Ch t Fill St t
7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 38/51
1540 Introduction To Mechatronics 38Stefan Williams
Yes
Overflow
Timeout
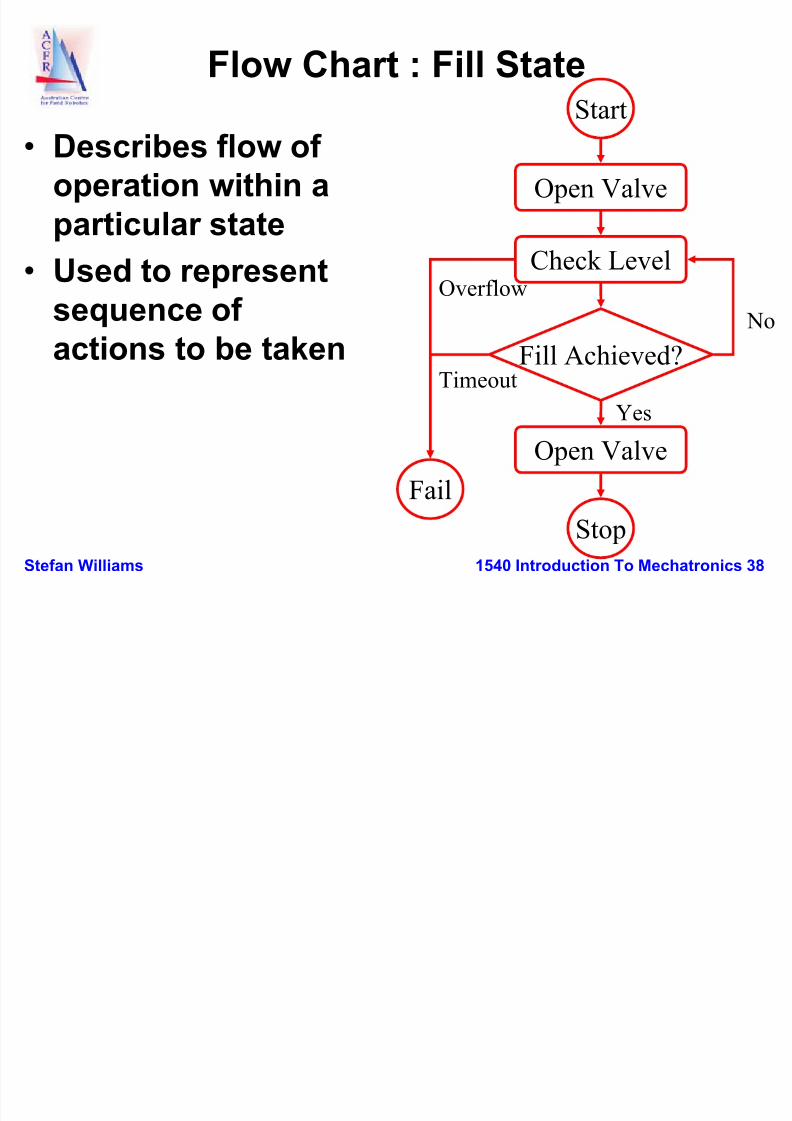
Flow Chart : Fill State
• Describes flow of
operation within a
particular state
• Used to represent
sequence of actions to be taken
Open Valve
Fill Achieved?
Check Level
Start
Stop
Fail
Open Valve
No
O ll S t B h i
7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 39/51
1540 Introduction To Mechatronics 39Stefan Williams
Overall Systems Behaviour
• System Engineering
• Control Theory
S t B h i I

7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 40/51
1540 Introduction To Mechatronics 40Stefan Williams
Systems Behaviour I
• Stability:
– Will it oscillate or blow up in some unpredictable way ?
– Is it naturally stable or does it require active control ?
• Robustness:
– Will it be sensitive to small changes in system or environment parameters ?
– What about uncertainty and signal noise ?
– If I hit it, does it fall over ?
Systems Behaviour II

7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 41/51
1540 Introduction To Mechatronics 41Stefan Williams
Systems Behaviour II
• Speed of Response
– Will it react sufficiently quickly on request ?
– Can it respond to “high frequency change” in desired
position etc (Bandwidth) ?
• Energy Efficiency – Does it do what it is supposed to do using a minimum
amount of energy ?
– Is there enough actuator power to drive the system ?
System Behaviour III
7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 42/51
1540 Introduction To Mechatronics 42Stefan Williams
System Behaviour III
• Safety
– Will it carry on working if something fails ?
– Will it fail but fail in a known way ?
– Software, actuator, sensor failures
– Standards, proofs, test programme.• Economics
– Overall cost in market
– Size, weight, noise
– Does it look good ?!!
Field Robotics at ACFR
7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 43/51
1540 Introduction To Mechatronics 43Stefan Williams
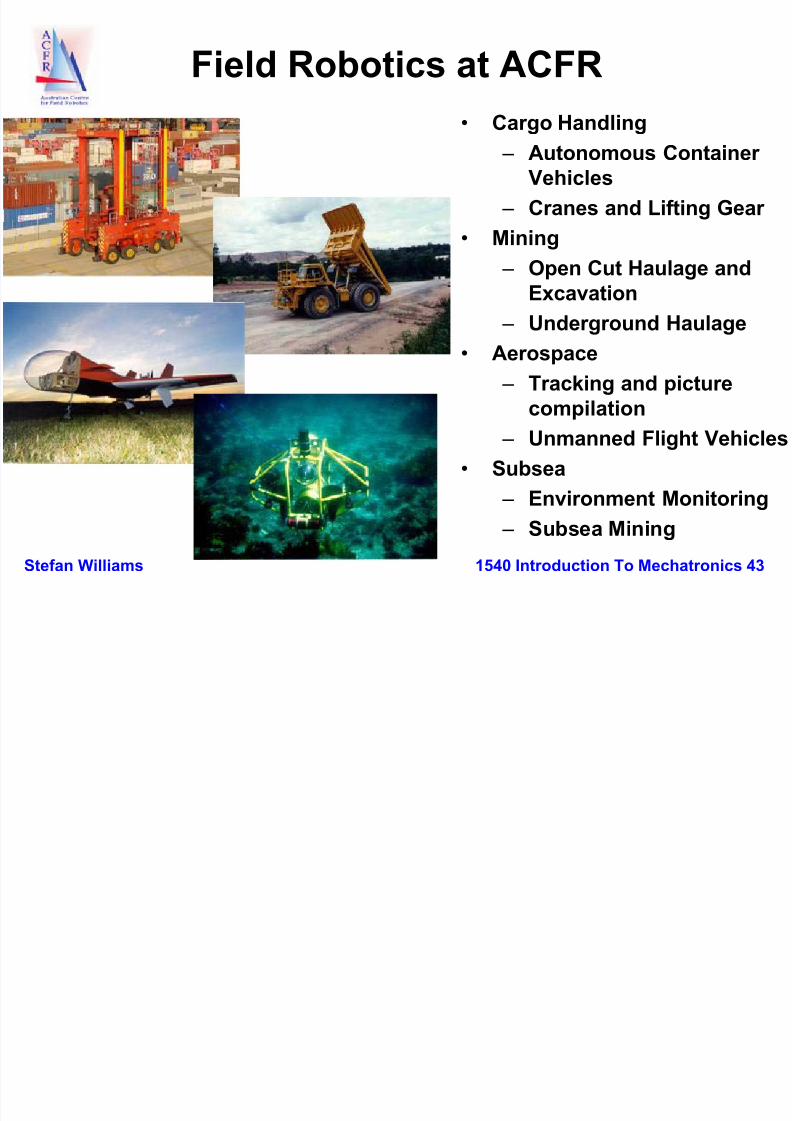
Field Robotics at ACFR
• Cargo Handling
– Autonomous Container
Vehicles
– Cranes and Lifting Gear • Mining
– Open Cut Haulage and
Excavation
– Underground Haulage• Aerospace
– Tracking and picture
compilation
– Unmanned Flight Vehicles
• Subsea
– Environment Monitoring
– Subsea Mining
Autonomous Flight Control
7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 44/51
1540 Introduction To Mechatronics 44Stefan Williams
g
Systems
• Control of Flight Platform Position and
Trajectory• Control of rudder, elevons, throttle, etc
• Measurement of position, attitude of platform• Measurement of relative location with respect
to ground.
Autonomous Flight Control
7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 45/51
1540 Introduction To Mechatronics 45Stefan Williams
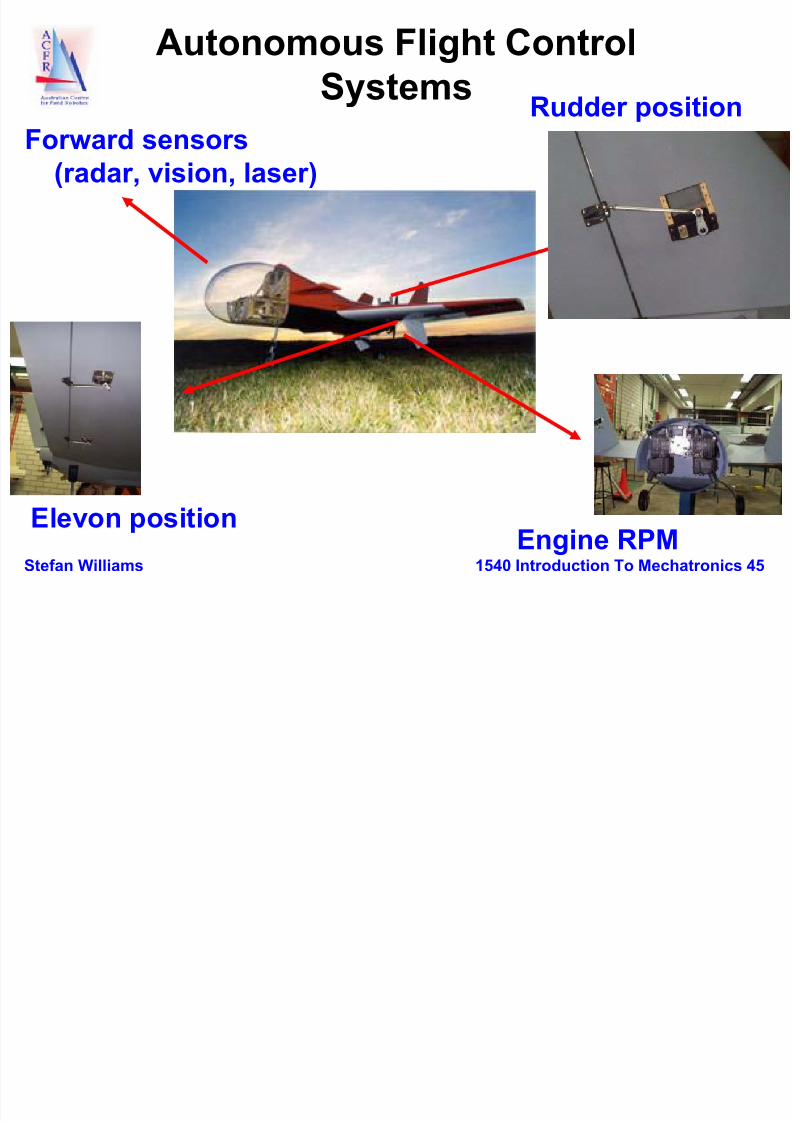
SystemsRudder position
Elevon position Engine RPM
Forward sensors
(radar, vision, laser)
Inertial Measurement Unit
7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 46/51
1540 Introduction To Mechatronics 46Stefan Williams
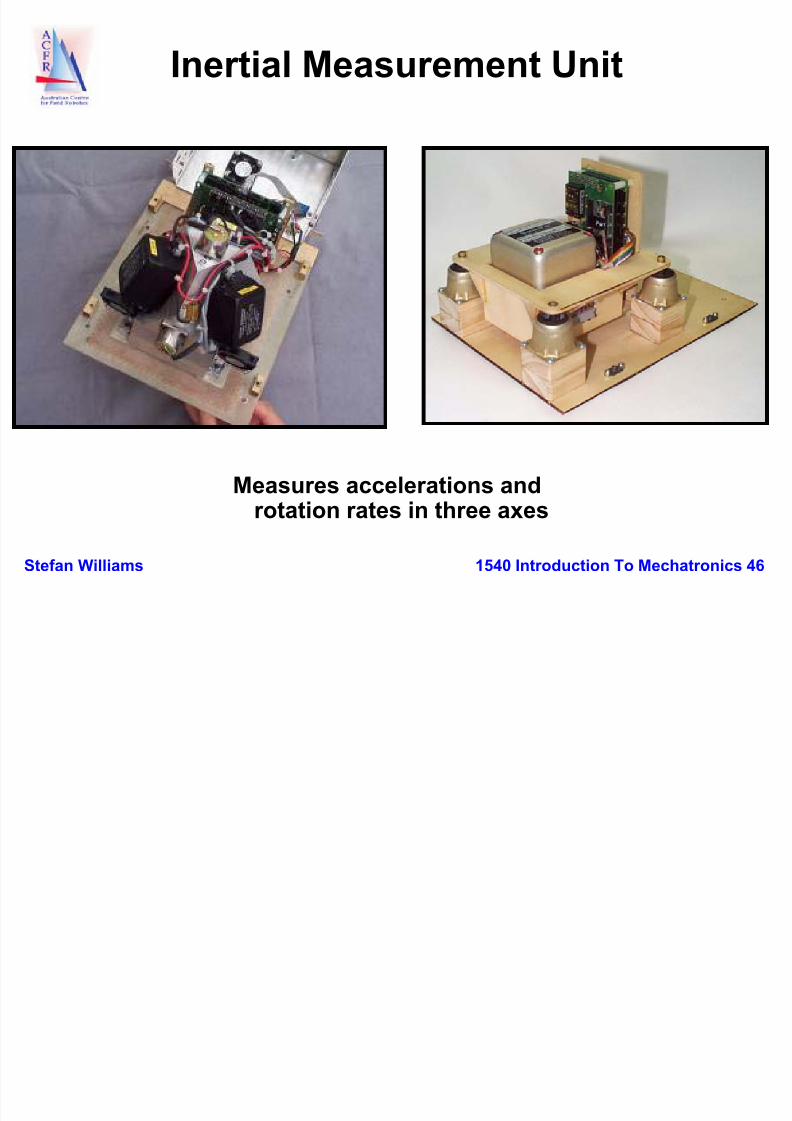
Inertial Measurement Unit
Measures accelerations androtation rates in three axes
Global Positioning System

7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 47/51
1540 Introduction To Mechatronics 47Stefan Williams
Global Positioning System
• Attitude differential GPS: – Four antenna-receivers
– Position: DGPS (2m) – Velocity: Doppler (0.2m/s)
– Attitude: Carrier phase (0.4O
• 10 Hz Corrections
Vehicle System
7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 48/51
1540 Introduction To Mechatronics 48Stefan Williams
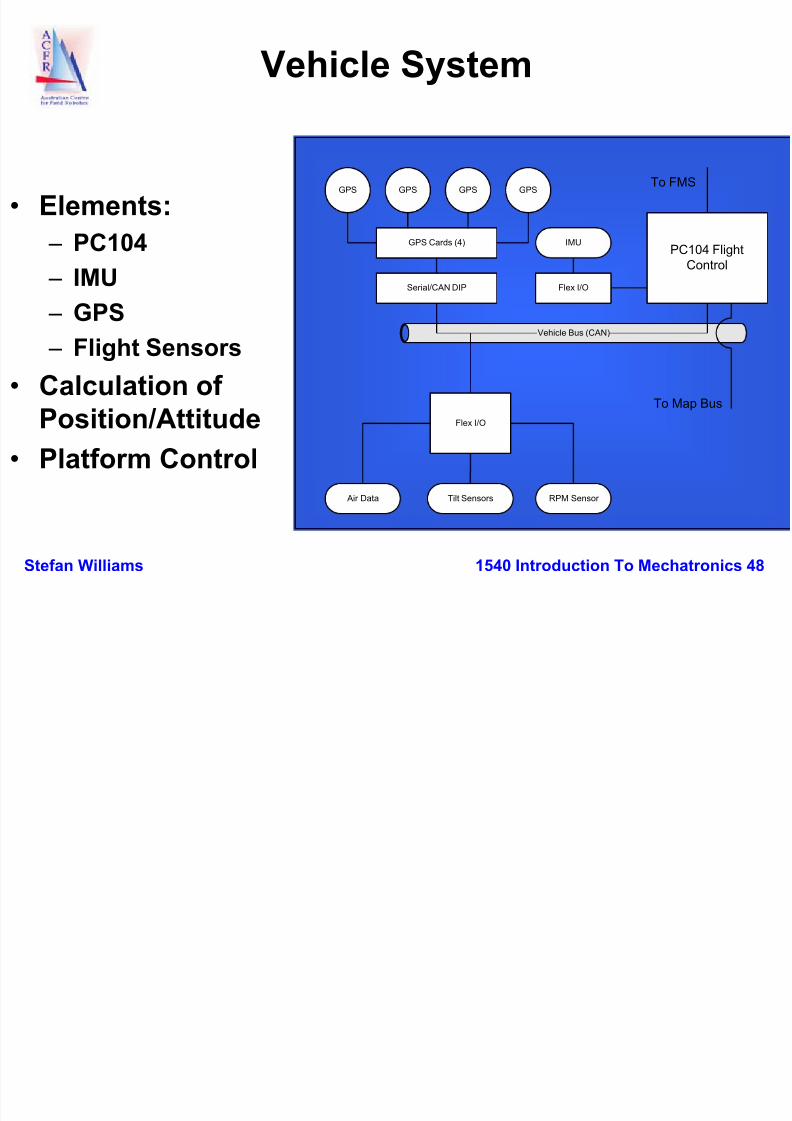
Vehicle System
Vehicle Bus (CAN)
Flex I/O
Air Data RPM Sensor Tilt Sensors
GPS Cards (4)
Serial/CAN DIP
GPS GPSGPSGPS
Flex I/O
PC104 Flight
Control
IMU
To Map Bus
To FMS
• Elements: – PC104
– IMU
– GPS – Flight Sensors
• Calculation of
Position/Attitude• Platform Control
Terrain Sensing

7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 49/51
1540 Introduction To Mechatronics 49Stefan Williams
Terrain Sensing
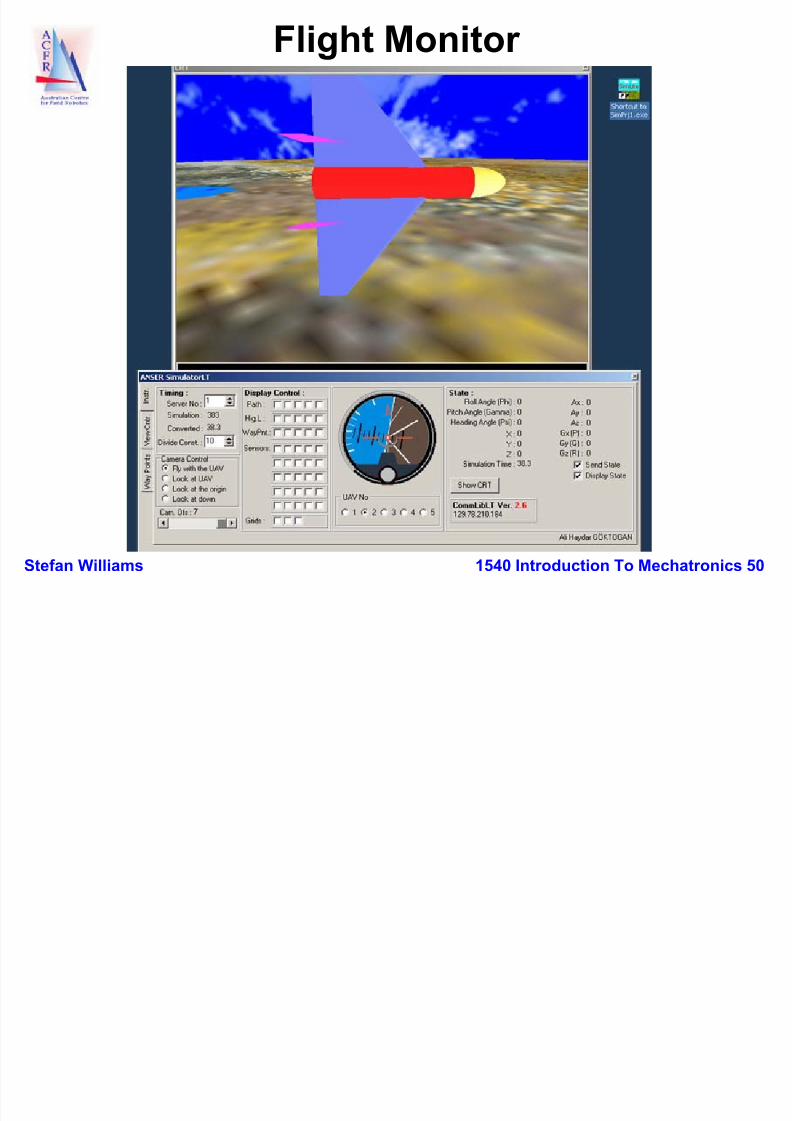
Flight Monitor
7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 50/51
1540 Introduction To Mechatronics 50Stefan Williams
Flight Tests

7/28/2019 1.Introduction a Mecatrónica
http://slidepdf.com/reader/full/1introduction-a-mecatronica 51/51
1540 Introduction To Mechatronics 51Stefan Williams
Flight Tests

















