3DVAR Retrieval of 3D Moisture Field 3DVAR Retrieval of 3D Moisture Field from Slant-path Water Vapor from Slant-path Water Vapor Observations of a High-resolution Observations of a High-resolution Hypothetical Hypothetical GPS Network GPS Network Haixia Liu and Ming Xue Haixia Liu and Ming Xue Center for Analysis and Prediction of Storms Center for Analysis and Prediction of Storms and School of Meteorology and School of Meteorology University of Oklahoma University of Oklahoma 16th Conf. Num. Wea. Pred 16th Conf. Num. Wea. Pred January 2004 January 2004
Transcript
3DVAR Retrieval of 3D Moisture Field from Slant-3DVAR Retrieval of 3D Moisture Field from Slant-path Water Vapor Observations of a High-resolution path Water Vapor Observations of a High-resolution
HypotheticalHypothetical GPS NetworkGPS Network
Haixia Liu and Ming XueHaixia Liu and Ming Xue
Center for Analysis and Prediction of StormsCenter for Analysis and Prediction of Stormsand School of Meteorology and School of Meteorology
University of OklahomaUniversity of Oklahoma16th Conf. Num. Wea. Pred 16th Conf. Num. Wea. Pred
January 2004January 2004
Background and MotivationBackground and Motivation
• Accurate analysis of 3D Accurate analysis of 3D water vapor field is important water vapor field is important for NWP.for NWP.
• GPS networks can potentially GPS networks can potentially provide slant-path water provide slant-path water vapor measurements at high vapor measurements at high spatial and temporal spatial and temporal resolutions. Also, ground-resolutions. Also, ground-based GPS receivers are based GPS receivers are relatively inexpensive.relatively inexpensive.
Suominet (Ware, 2000)
• The past works using 4DVAR and 3DVAR methods incThe past works using 4DVAR and 3DVAR methods include lude
• Kuo et al. (1996), Guo et al. (2000), and Ha et al. (20Kuo et al. (1996), Guo et al. (2000), and Ha et al. (2003)03)
• MacDonald and Xie (2002)MacDonald and Xie (2002)
Background and Motivation ~ continuedBackground and Motivation ~ continued
This WorkThis Work
Retrieve 3D moisture distribution using slant-patRetrieve 3D moisture distribution using slant-path water vapor data from a hypothetical GPS obsh water vapor data from a hypothetical GPS observation network.ervation network.
Using 3DVAR data assimilation (Lorenc 1981; Using 3DVAR data assimilation (Lorenc 1981; Daley 1991) techniques, including treatment of bDaley 1991) techniques, including treatment of background errors.ackground errors.
OutlineOutline
The 3DVAR methodThe 3DVAR method
Observing System Simulation Experiments Observing System Simulation Experiments (OSSE)(OSSE)
Numerical experimentsNumerical experiments
SummarySummary
3DVAR Assimilation System3DVAR Assimilation System
The following cost-function is minimized variationally
1
1
1
( ) ( ) ( ) ( )
1( ) ( )
21
21
[ ( ) ] [ ( ) ]2
b o sfc
Tb b
T
swv swv
Tsfc sfc sfc sfc sfc
J x J x J x J x
x x x x
H x y H x y
H x y R H x y
B
R
Define a new vector Define a new vector vv (Huang, 2000),1 ( )bv x x B
The cost function can be written as:The cost function can be written as:
which does not involve the inverse of which does not involve the inverse of BB..
3DVAR Assimilation System - continued3DVAR Assimilation System - continued
1
1
( )
1
21
21
2
b o sfc
b bswv swv
b bsfc sfc sfc sfcsfc
J v J v J v J v
v v
H v x y H v x y
H v x y H v x y
B
B R B
B R B
2
2
,
expij
ij br
rb
L
B, the background error covariance matrix, is modeled using isotropic Gaussian filter
3DVAR Assimilation System - continued3DVAR Assimilation System - continued
OSSEOSSE
ARPS model (Xue et al, 2000) simulates one dryline case ARPS model (Xue et al, 2000) simulates one dryline case (‘nature’ run) during IHOP_2002 field experiment (‘nature’ run) during IHOP_2002 field experiment periodperiod
initialized at 12UTC June 18, 2002initialized at 12UTC June 18, 2002 integrated for 3hoursintegrated for 3hours grid spacing 9kmgrid spacing 9km in a terrain-following coordinate.in a terrain-following coordinate. domain size 1620x1440kmdomain size 1620x1440km2 2 over over Southern Great PlainSouthern Great Plain
This ‘nature’ run result is considered as true atmosphereThis ‘nature’ run result is considered as true atmosphere
Specific humidity field (g kg-1) at the second model level (~30m) above ground, valid at 1500 UTC June 18, 2002, from the ‘nature’ run.
qv at 30m above ground
Hypothetical GPS networkHypothetical GPS network
GPS Satellite GPS Satellite
(km)
km
km
Hypothetical GPS networkHypothetical GPS network
9 GPS satellites9 GPS satellites simultaneously in viewsimultaneously in view irregularly distributed irregularly distributed
132 Ground-based GPS receivers:132 Ground-based GPS receivers: evenly distributed in this domainevenly distributed in this domain station distance is 144 km.station distance is 144 km.
Slant-path Water Vapor (SWV) ObservationsSlant-path Water Vapor (SWV) Observations
With this hypothetical GPS observing network and With this hypothetical GPS observing network and moisture field of ‘nature’ run is sampled to produce moisture field of ‘nature’ run is sampled to produce the SWV observations:the SWV observations:
th
th
j satellite
ij v
i receiver
SWV q ds
Control ExperimentControl Experiment
Observations:Observations:• SWVSWV• regular qregular qvv obs at the surface stations obs at the surface stations
Background field:Background field:• 9-point smoothing 50 times to the ‘natural’ run.9-point smoothing 50 times to the ‘natural’ run.
“Nature”Analysis Increment from Control
The increment fields of qv (g kg-1) at ~30m above ground
qv increment ~30m above ground
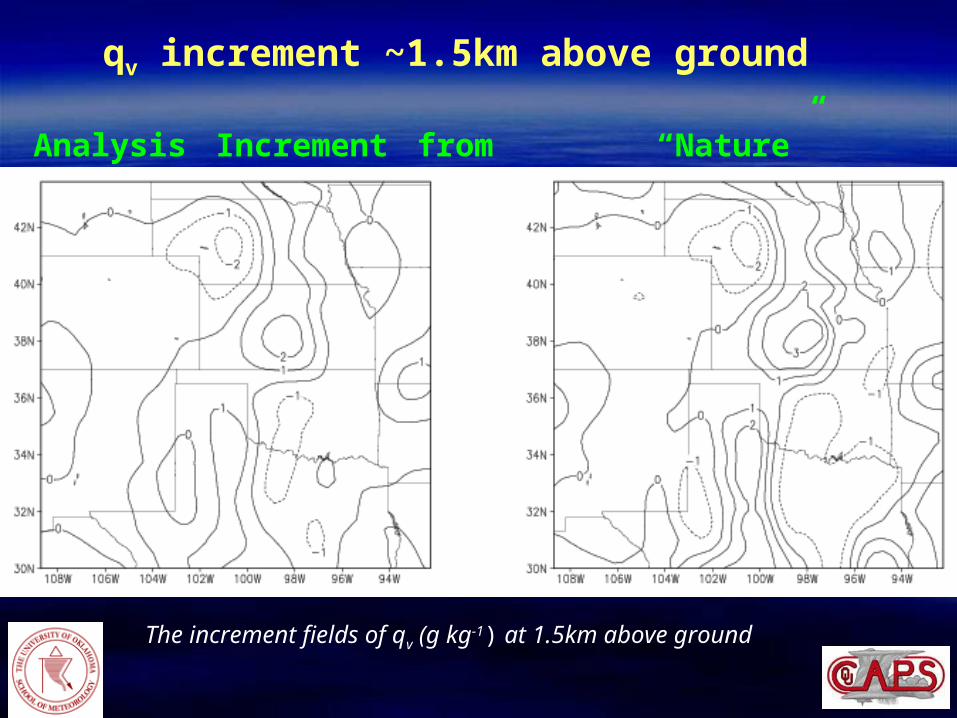
qv increment ~1.5km above ground
The increment fields of qv (g kg-1) at 1.5km above ground
“Nature”Analysis Increment from Control
qv increment ~3km above ground
The increment fields of qv (g kg-1) at 3km above ground
“Nature”Analysis Increment from Control
West-East Vertical Cross-section of qv @ 34N
The red solid line is from the control experiment and the purple dotted line from the ‘nature’ run.
Sensitivity experimentsSensitivity experiments
The impact of removing surface moisture observations.The impact of removing surface moisture observations.
qv increment ~ 30m above ground
The impact of removing vertical filteringThe impact of removing vertical filtering
0
5
10
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4
He
ight
(km
)
RMS error (g kg-1)
The RMS error in g kg-1 with height. Solid line is for the control run and dashed line for the run without vertical filtering
SummarySummary
Our 3DVAR system incorporating background error throOur 3DVAR system incorporating background error through an isotropic Gaussian filter properly recovers 3D meugh an isotropic Gaussian filter properly recovers 3D meso-scale moisture structure in a dryline case.so-scale moisture structure in a dryline case.
Surface observations are important for accurate analysis Surface observations are important for accurate analysis of qof qvv field at low levels because of the absence of overlap field at low levels because of the absence of overlap
ping pathsping paths
The vertical filter is beneficial, especially in data-sparse rThe vertical filter is beneficial, especially in data-sparse regions such as the low levels.egions such as the low levels.
Future workFuture work
Riishojgaard (1998) points out that the background errors at nearby points that have similar values of the analysis field tend to be similar. Flow-dependent background error covariance based on such an assumption should improve the analysis, especially when data is sparse. So flow-dependent B is being tested.
The analysis will be used to initialize a mesoscale model and the impact of assimilating GPS data will be further examined.
Analysis cycles will be performed that hopefully will increase the impact of GPS SWV data distributed over time.