17
PRESENTATION ON INDUCTION MOTOR SUKHPREET SINGH 7080710272 B.TECH (EEE)
PRESENTATIONON
INDUCTION MOTOR
SUKHPREET SINGH
7080710272
B.TECH (EEE)
1 History 2 Principle of operation and comparison to
synchronous motors 3 Formulas 4 Construction 5 Speed control
6 Starting of induction motor 7 Types of starters
Contents
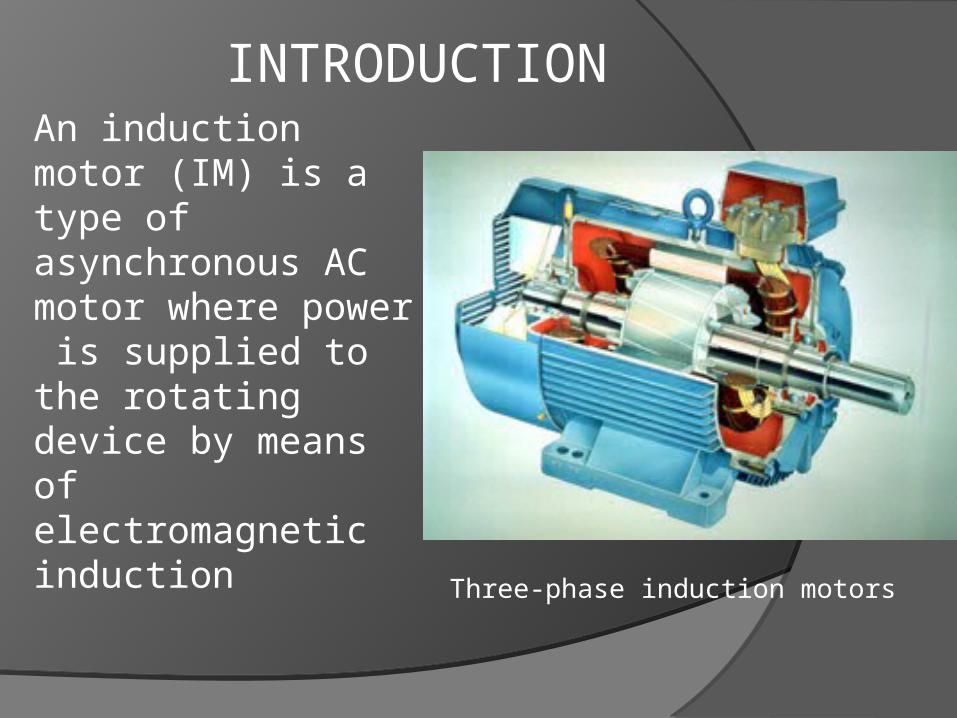
An induction motor (IM) is a type of asynchronous AC motor where power is supplied to the rotating device by means of electromagnetic induction
Three-phase induction motors
INTRODUCTION
History
The induction motor with a wrapped rotor was invented by Nikola Tesla in 1888 in the United States. In his scientific work, Tesla laid the foundations for understanding the way the motor operates. The induction motor with a cage was invented by Mikhail Dolivo-Dobrovolsky about a year later in Europe. Technological development in the field has improved to where a 100 hp (73.6 kW) engine from 1976 takes the same volume as a 7.5 hp (5.5 kW) engine did in 1897. Currently, the most common induction motor, is the cage rotor motor.
Principle of operation
The basic difference between an induction motor and a synchronous AC motor is that in the latter a current is supplied onto the rotor. This then creates a magnetic field which, through magnetic interaction, links to the rotating magnetic field in the stator which in turn causes the rotor to turn. It is called synchronous because at steady state the speed of the rotor is the same as the speed of the rotating magnetic field in the stator.
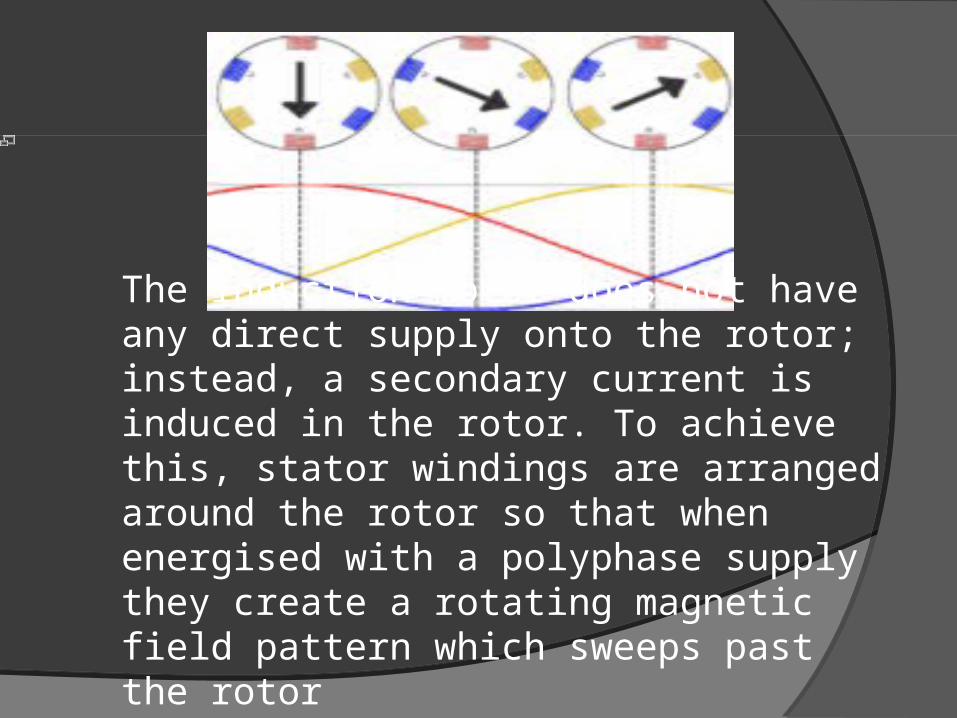
The induction motor does not have any direct supply onto the rotor; instead, a secondary current is induced in the rotor. To achieve this, stator windings are arranged around the rotor so that when energised with a polyphase supply they create a rotating magnetic field pattern which sweeps past the rotor
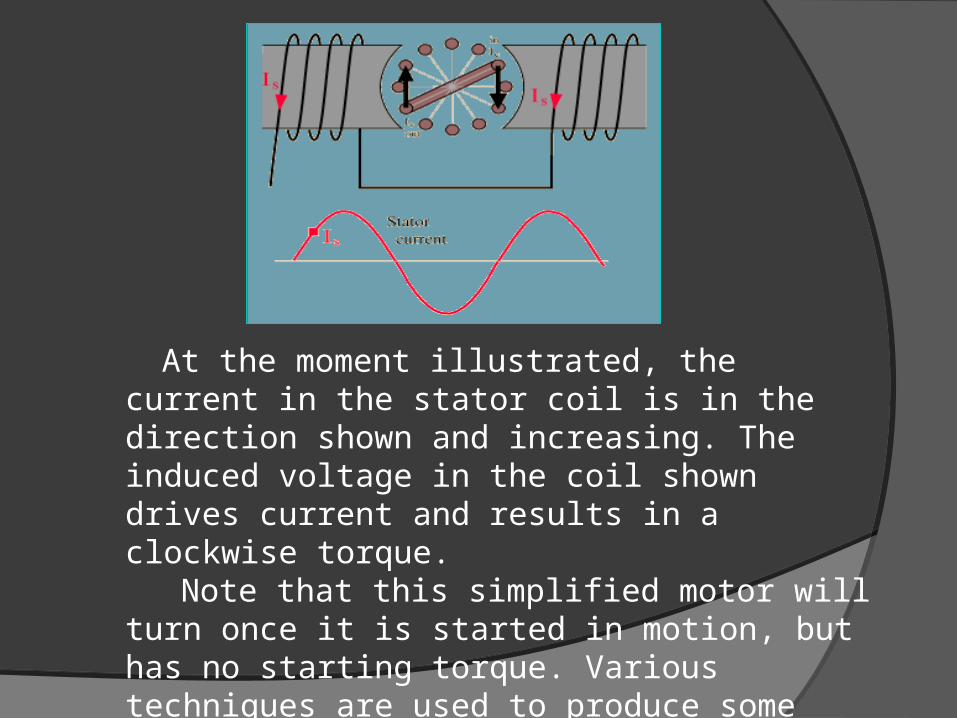
At the moment illustrated, the current in the stator coil is in the direction shown and increasing. The induced voltage in the coil shown drives current and results in a clockwise torque.
Note that this simplified motor will turn once it is started in motion, but has no starting torque. Various techniques are used to produce some asymmetry in the fields to give the motor a starting torque.
In a three phase induction motor, the induced emf in the rotor circuit depends on the slip of the induction motor and the magnitude of the rotor current depends upon this induced emf (electromotive force). When the motor is started, the slip is equal to 1 as the rotor speed is zero, so the induced emf in the rotor is large. As a result, a very high current flows through the rotor. This is similar to a transformer with the secondary coil short circuited, which causes the primary coil to draw a high current from the mains. Similarly, when an induction motor starts, a very high current is drawn by the stator, on the order of 5 to 9 times the full load current. This high current can damage the motor windings and because it causes heavy line voltage drop, other appliances connected to the same line may be affected by the voltage fluctuation. To avoid such effects, the starting current should be limited
The rotational speed of the rotor is controlled by the number of pole pairs (number of windings in the stator) and by the frequency of the supply voltage. Before the development of cheap power electronics, it was difficult to vary the frequency to the motor and therefore the uses for the induction motor were limited. There are various techniques to produce a desired speed. The most commonly used technique is PWM(Pulse Width Modulation), in which a DC signal is switched on and off very rapidly, producing a sequence of electrical pulses to the inductor windings. The dutycycle of the pulses, also known as the mark-space ratio, determines the average power input to the motor.
TYPES OF MOTORS Based on type of phase supply
○ Three phase induction motor (self starting in nature)
single phase induction motor (not self starting)
Other Squirrel cage induction motor
Slip ring induction motor
The rotor bars in squirrel-cage induction motors are not straight, but have some skew to reduce noise and harmonics.The motor's phase type is one of two types
1.Single-phase induction motor
2.3-phase induction motor
In a DC machine, the stator winding is excited by DC current and hence the field produced by thiswinding is time invariant in nature. In this machine the conversion of energy from electrical to mechanical form or vice versa is possible by one of the following ways:
1.rotating the rotor in the field produced by the stator2.feeding external dc current through carbon brushes to the rotor
Electric motors convert electrical power to mechanical power in its rotor (rotating part).
There are several ways to supply power to the rotor.
AC motor this power is induced in the rotating device. An induction motor can be called a rotating transformer
because the stator(stationary part) is essentially the primary side of the transformer and the rotor (rotating part) is the secondary side.
Induction motors are widely used, especially polyphase induction motors, which are frequently used in industrial drives.
The stator consists of wound 'poles' that carry the supply current that induces a magnetic field in the conductor. The number of 'poles' can vary between motor types but the poles are always in (i.e. 2,4,6 etc) pairs. There are two types of rotor
Construction
1.Squirrel-cage rotor 2.Slip ring rotor
The most common rotor is a squirrel-cage rotor. It is made up of bars of either solid copper (most common) or aluminum that span the length of the rotor, and are connected through a ring at each end
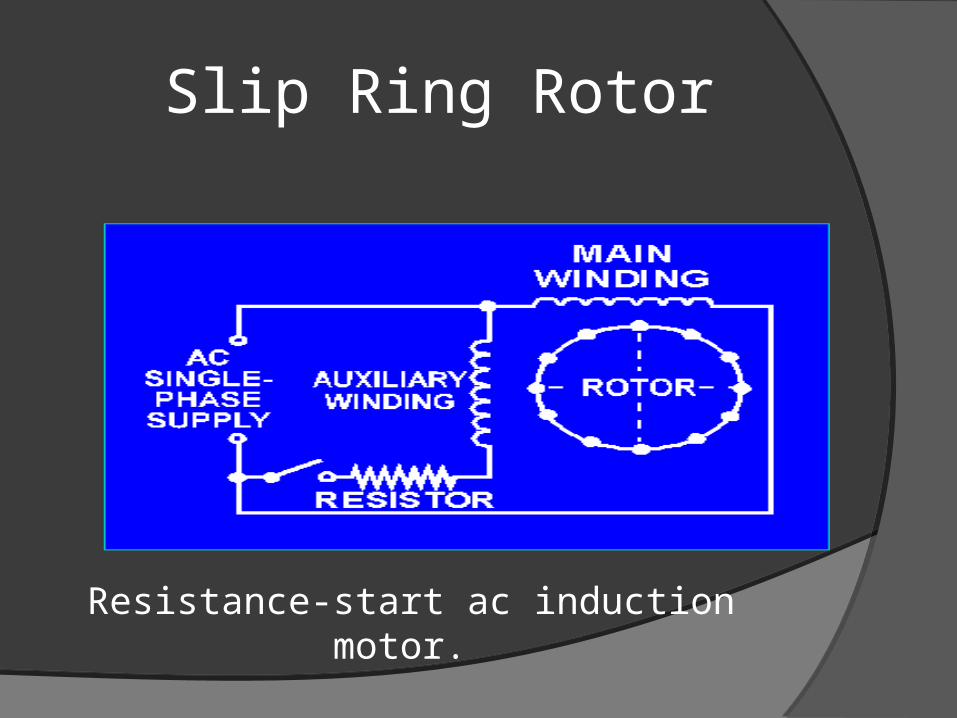
Slip Ring Rotor
Resistance-start ac induction motor.
Formulas
The relationship between the supply frequency, f, the number of pole pairs, p, and the synchronous speed, n, is given by f = p*n.From this relationship:Speed of rotating field (n) = f/P (revs.s-1)Speed of rotor = n(1-S) (rev.s-1)where S is the slip.Slip is calculated using:% slip = (n - r) / n * 100where r is the rotor speedIn contrast, a synchronous motor always runs at either a constant speed N=(120f)/P or zero.


















