7-1 Probabilistic Robotics: Kalman Filters Slide credits: Wolfram Burgard, Dieter Fox, Cyrill Stachniss, Giorgio Grisetti, Maren Bennewitz, Christian Plagemann, Dirk Haehnel, Mike Montemerlo, Nick Roy, Kai Arras, Patrick Pfaff and others Sebastian Thrun & Alex Teichman Stanford Artificial Intelligence Lab
Transcript
7-1
Probabilistic Robotics: Kalman Filters
Slide credits: Wolfram Burgard, Dieter Fox, Cyrill Stachniss, Giorgio Grisetti, Maren Bennewitz, Christian Plagemann, Dirk Haehnel, Mike Montemerlo, Nick Roy, Kai Arras, Patrick Pfaff and others
Sebastian Thrun & Alex TeichmanStanford Artificial Intelligence Lab
7-2
Bayes Filters in Localization
111 )(),|()|()( tttttttt dxxBelxuxPxzPxBel
• Prediction
• Measurement Update
Bayes Filter Reminder
111 )(),|()( tttttt dxxbelxuxpxbel
)()|()( tttt xbelxzpxbel
Gaussians
2
2)(
2
1
2
2
1)(
:),(~)(
x
exp
Nxp
-s s
m
Univariate
)()(2
1
2/12/
1
)2(
1)(
:)(~)(
μxΣμx
Σx
Σμx
t
ep
,Νp
d
m
Multivariate
),(~),(~ 22
2
abaNYbaXY
NX
Properties of Gaussians
22
21
222
21
21
122
21
22
212222
2111 1
,~)()(),(~
),(~
NXpXpNX
NX
• We stay in the “Gaussian world” as long as we start with Gaussians and perform only linear transformations.
),(~),(~ TAABANY
BAXY
NX
Multivariate Gaussians
€
X1 ~ N(μ1,Σ1)
X2 ~ N(μ2,Σ2)
⎫ ⎬ ⎭⇒ p(X1) ⋅ p(X2) ~ N
Σ1−1
Σ1−1 + Σ2
−1μ1 +
Σ2−1
Σ1−1 + Σ2
−1μ2,
1
Σ1−1 + Σ2
−1
⎛
⎝ ⎜
⎞
⎠ ⎟
7-7
Discrete Kalman Filter
tttttt uBxAx 1
tttt xCz
Estimates the state x of a discrete-time controlled process that is governed by the linear stochastic difference equation
with a measurement
7-8
Components of a Kalman Filter
t
Matrix (nxn) that describes how the state evolves from t to t-1 without controls or noise.
tA
Matrix (nxl) that describes how the control ut changes the state from t to t-1.tB
Matrix (kxn) that describes how to map the state xt to an observation zt.tC
t
Random variables representing the process and measurement noise that are assumed to be independent and normally distributed with covariance Rt and Qt respectively.
7-9
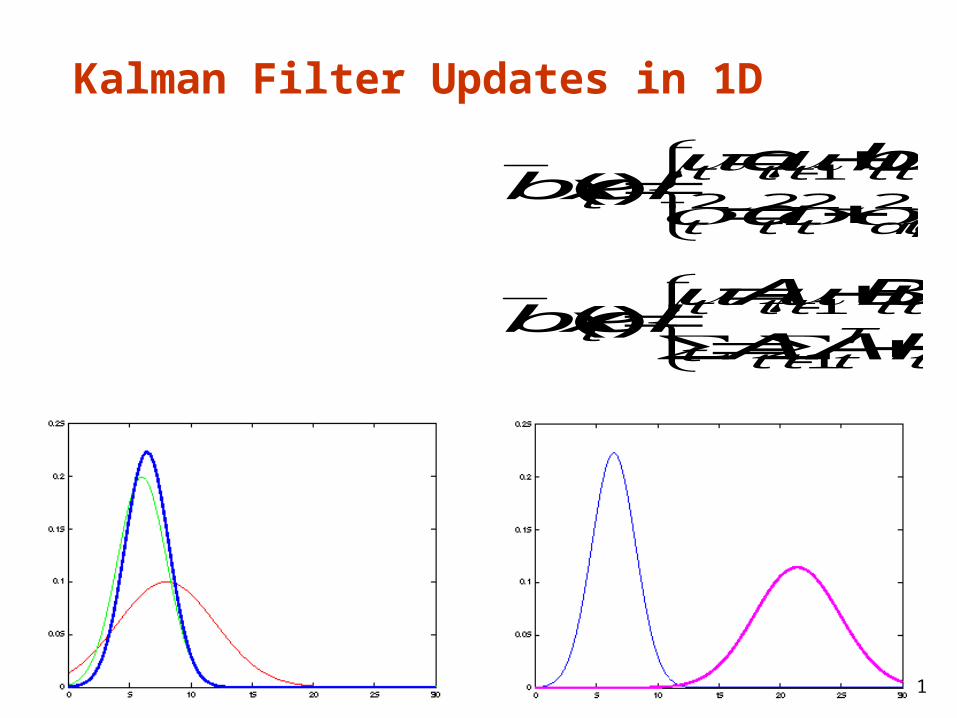
Kalman Filter Updates in 1D
7-10
Kalman Filter Updates in 1D
1)(with )(
)()(
tTttt
Tttt
tttt
ttttttt QCCCK
CKI
CzKxbel
2,
2
2
22 with )1(
)()(
tobst
tt
ttt
tttttt K
K
zKxbel
Kalman Filter Updates in 1D
tTtttt
tttttt RAA
uBAxbel
1
1)(
2
,2221)(
tactttt
tttttt a
ubaxbel
Kalman Filter Updates
0000 ,;)( xNxbel
Linear Gaussian Systems: Initialization
• Initial belief is normally distributed:
• Dynamics are linear function of state and control plus additive noise:
tttttt uBxAx 1
Linear Gaussian Systems: Dynamics
ttttttttt RuBxAxNxuxp ,;),|( 11
1111
111
,;~,;~
)(),|()(
ttttttttt
tttttt
xNRuBxAxN
dxxbelxuxpxbel
Linear Gaussian Systems: Dynamics
tTtttt
tttttt
ttttT
tt
ttttttT
tttttt
ttttttttt
tttttt
RAA
uBAxbel
dxxx
uBxAxRuBxAxxbel
xNRuBxAxN
dxxbelxuxpxbel
1
1
1111111
11
1
1111
111
)(
)()(2
1exp
)()(2
1exp)(
,;~,;~
)(),|()(
• Observations are linear function of state plus additive noise:
tttt xCz
Linear Gaussian Systems: Observations
tttttt QxCzNxzp ,;)|(
ttttttt
tttt
xNQxCzN
xbelxzpxbel
,;~,;~
)()|()(
Linear Gaussian Systems: Observations
1
11
)(with )(
)()(
)()(2
1exp)()(
2
1exp)(
,;~,;~
)()|()(
tTttt
Tttt
tttt
ttttttt
tttT
ttttttT
tttt
ttttttt
tttt
QCCCKCKI
CzKxbel
xxxCzQxCzxbel
xNQxCzN
xbelxzpxbel
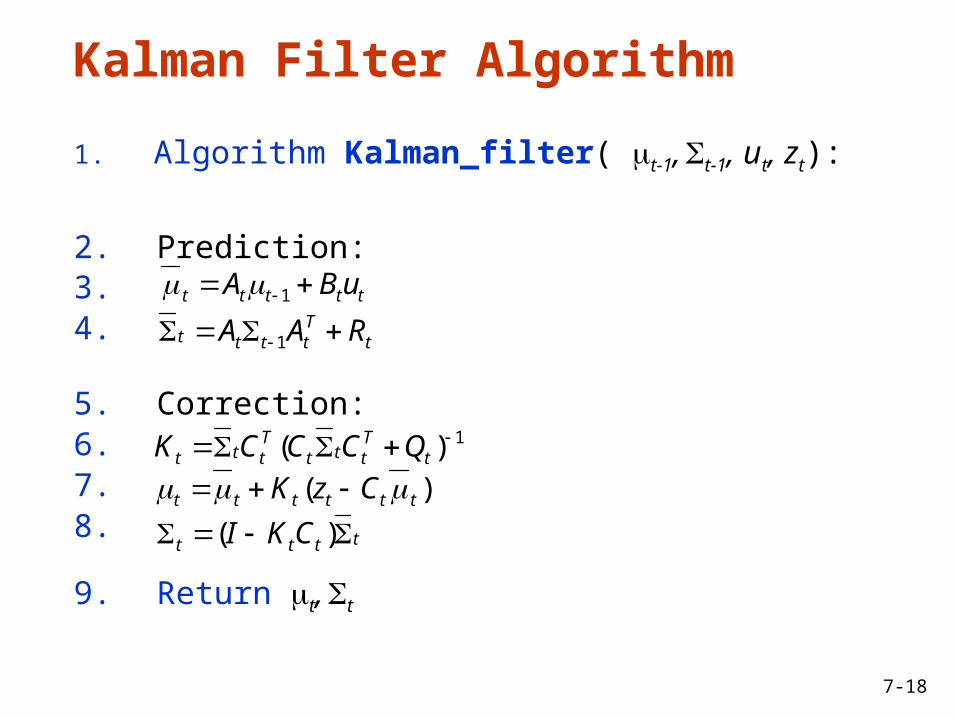
Kalman Filter Algorithm
1. Algorithm Kalman_filter( mt-1, St-1, ut, zt):
2. Prediction:3. 4.
5. Correction:6. 7. 8.
9. Return mt, St
ttttt uBA 1
tTtttt RAA 1
1)( tTttt
Tttt QCCCK
)( tttttt CzK
tttt CKI )(
Kalman Filter Algorithm
Kalman Filter Algorithm
• Prediction• Observation
• Matching• Correction
7-21
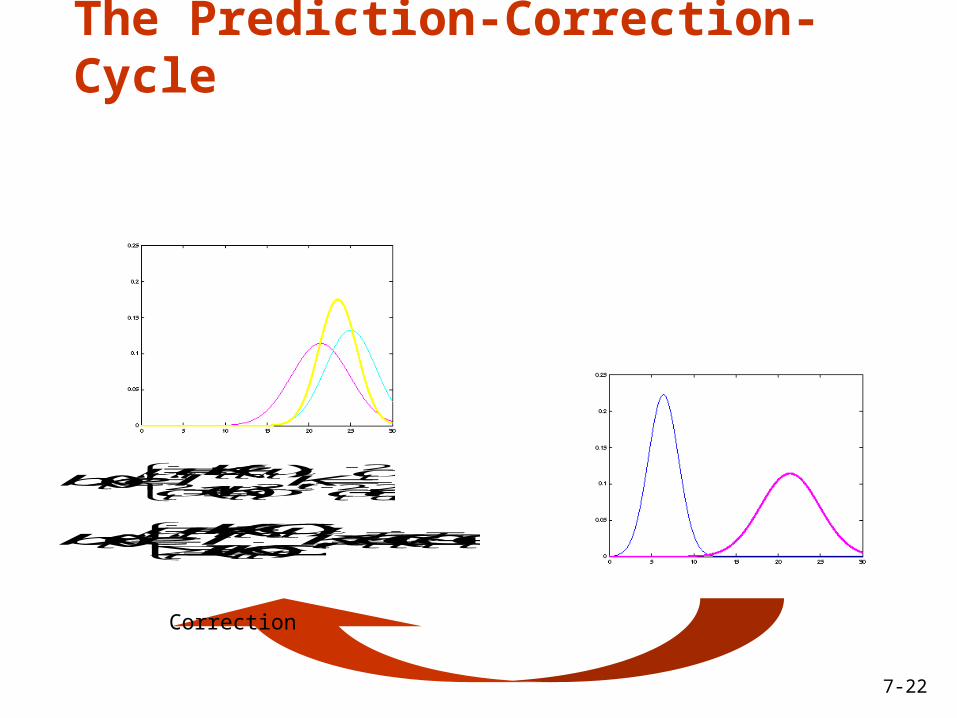
The Prediction-Correction-Cycle
tTtttt
tttttt RAA
uBAxbel
1
1)(
2
,2221)(
tactttt
tttttt a
ubaxbel
Prediction
7-22
The Prediction-Correction-Cycle
1)(,)(
)()(
tTttt
Tttt
tttt
ttttttt QCCCK
CKI
CzKxbel
2,
2
2
22 ,)1(
)()(
tobst
tt
ttt
tttttt K
K
zKxbel
Correction
7-23
The Prediction-Correction-Cycle
1)(,)(
)()(
tTttt
Tttt
tttt
ttttttt QCCCK
CKI
CzKxbel
2,
2
2
22 ,)1(
)()(
tobst
tt
ttt
tttttt K
K
zKxbel
tTtttt
tttttt RAA
uBAxbel
1
1)(
2
,2221)(
tactttt
tttttt a
ubaxbel
Correction
Prediction
Kalman Filter Summary
• Highly efficient: Polynomial in measurement dimensionality k and state dimensionality n: O(k2.376 + n2)
• Optimal for linear Gaussian systems!
• Most robotics systems are nonlinear!
Nonlinear Dynamic Systems
• Most realistic robotic problems involve nonlinear functions
),( 1 ttt xugx
)( tt xhz
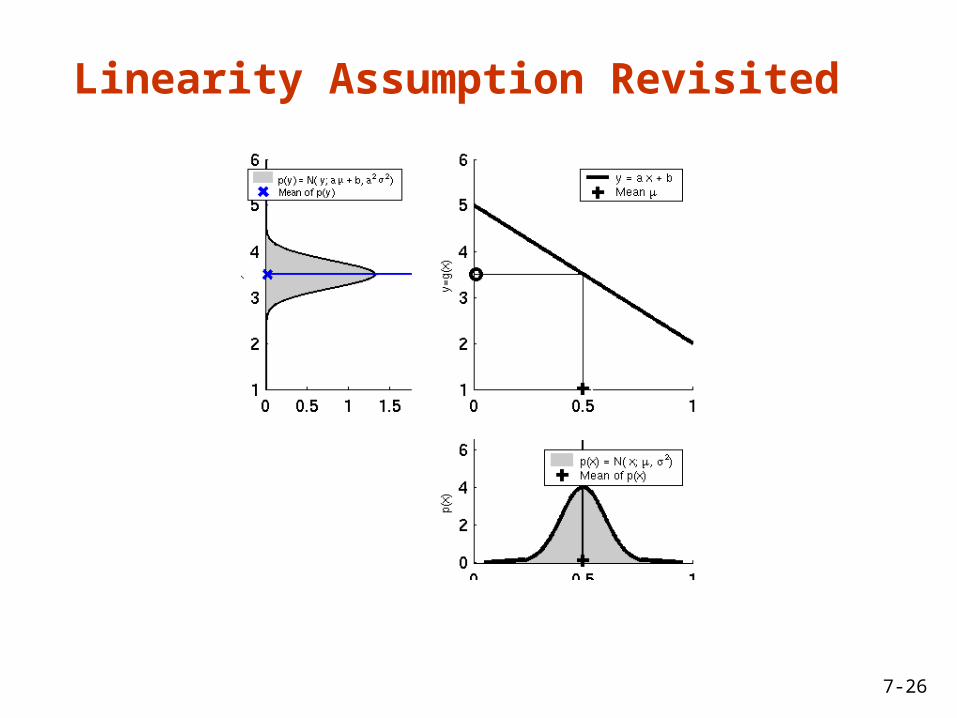
Linearity Assumption Revisited
Non-linear Function
EKF Linearization (1)
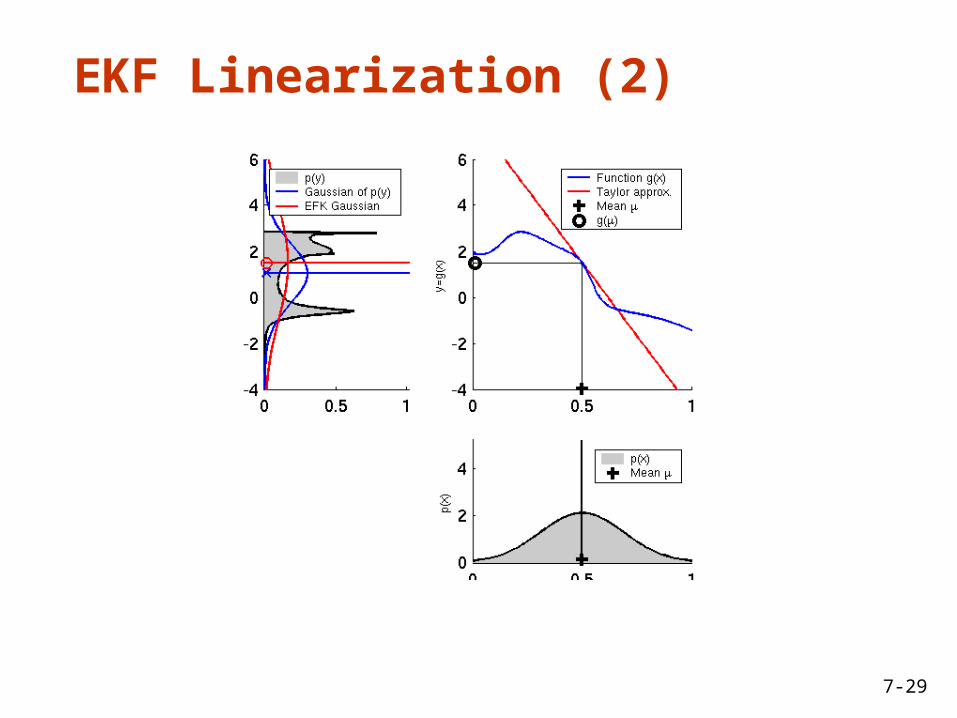
EKF Linearization (2)
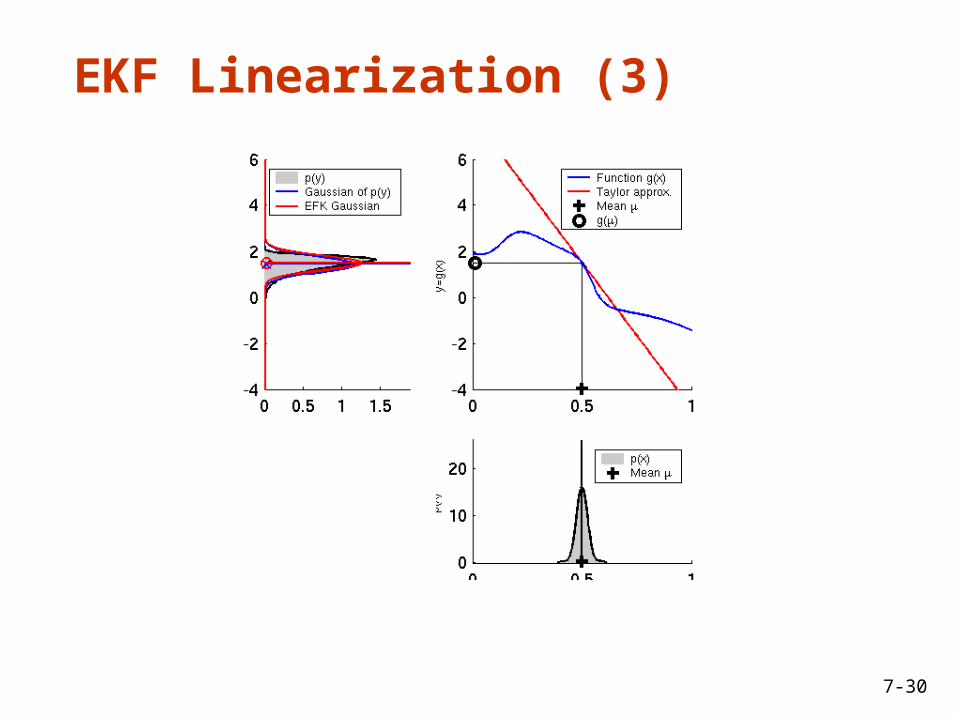
EKF Linearization (3)
• Prediction:
• Correction:
EKF Linearization: First Order Taylor Series Expansion
)(),(),(
)(),(
),(),(
1111
111
111
ttttttt
ttt
tttttt
xGugxug
xx
ugugxug
)()()(
)()(
)()(
ttttt
ttt
ttt
xHhxh
xx
hhxh
EKF Algorithm
1. Extended_Kalman_filter( mt-1, St-1, ut, zt):
2. Prediction:3. 4.
5. Correction:6. 7. 8.
9. Return mt, St
),( 1 ttt ug
tTtttt RGG 1
1)( tTttt
Tttt QHHHK
))(( ttttt hzK
tttt HKI )(
1
1),(
t
ttt x
ugG
t
tt x
hH
)(
ttttt uBA 1
tTtttt RAA 1
1)( tTttt
Tttt QCCCK
)( tttttt CzK
tttt CKI )(
Localization
• Given • Map of the environment.• Sequence of sensor measurements.
• Wanted• Estimate of the robot’s position.
• Problem classes• Position tracking• Global localization• Kidnapped robot problem (recovery)
“Using sensory information to locate the robot in its environment is the most fundamental problem to providing a mobile robot with autonomous capabilities.” [Cox ’91]
Landmark-based Localization
1. EKF_localization ( mt-1, St-1, ut, zt, m):
Prediction:
2.
3.
4. ),( 1 ttt ug
Tttt
Ttttt VMVGG 1
,1,1,1
,1,1,1
,1,1,1
1
1
'''
'''
'''
),(
tytxt
tytxt
tytxt
t
ttt
yyy
xxx
x
ugG
tt
tt
tt
t
ttt
v
y
v
y
x
v
x
u
ugV
''
''
''
),( 1
2
43
221
||||0
0||||
tt
ttt
v
vM
Motion noise
Jacobian of g w.r.t location
Predicted mean
Predicted covariance
Jacobian of g w.r.t control
1. EKF_localization ( mt-1, St-1, ut, zt, m):
Correction:
2.
3.
4.
5.
6.
)ˆ( ttttt zzK
tttt HKI
,
,
,
,
,
,),(
t
t
t
t
yt
t
yt
t
xt
t
xt
t
t
tt
rrr
x
mhH
,,,
2,
2,
,2atanˆ
txtxyty
ytyxtxt
mm
mmz
tTtttt QHHS
1 tTttt SHK
2
2
0
0
r
rtQ
Predicted measurement mean
Pred. measurement covariance
Kalman gain
Updated mean
Updated covariance
Jacobian of h w.r.t location
EKF Prediction Step
EKF Observation Prediction Step
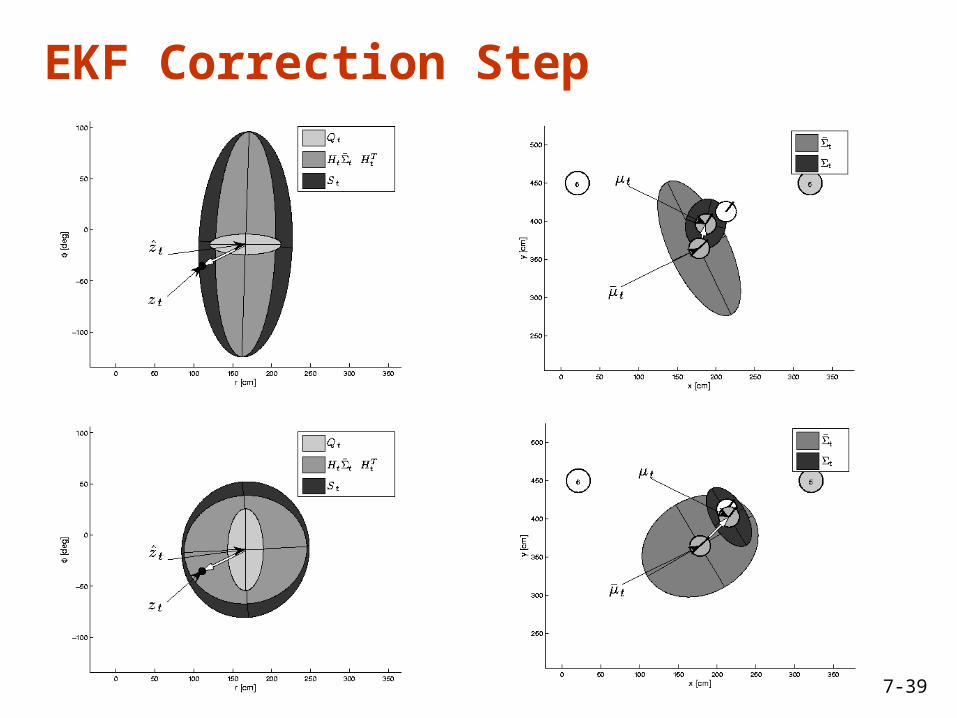
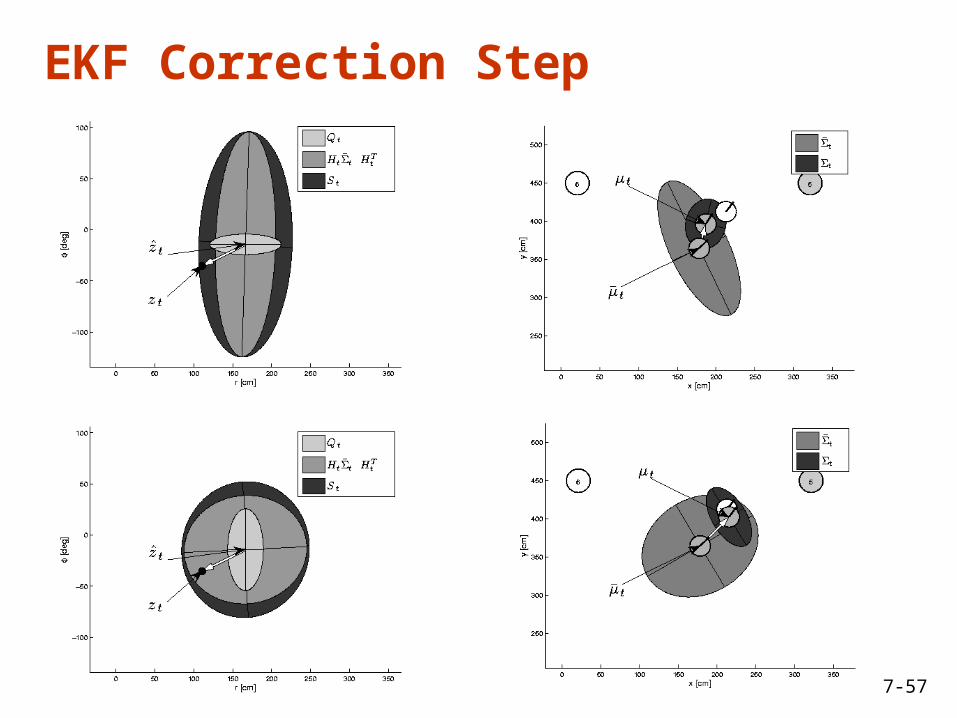
EKF Correction Step
Estimation Sequence (1)
Estimation Sequence (2)
Comparison to GroundTruth
EKF Summary
• Highly efficient: Polynomial in measurement dimensionality k and state dimensionality n: O(k2.376 + n2)
• Not optimal!• Can diverge if nonlinearities are large!• Works surprisingly well even when all
assumptions are violated!
EKF Localization Example
• Line and point landmarks
EKF Localization Example
• Line and point landmarks
EKF Localization Example
• Lines only (Swiss National Exhibition Expo.02)
Linearization via Unscented Transform
EKF UKF
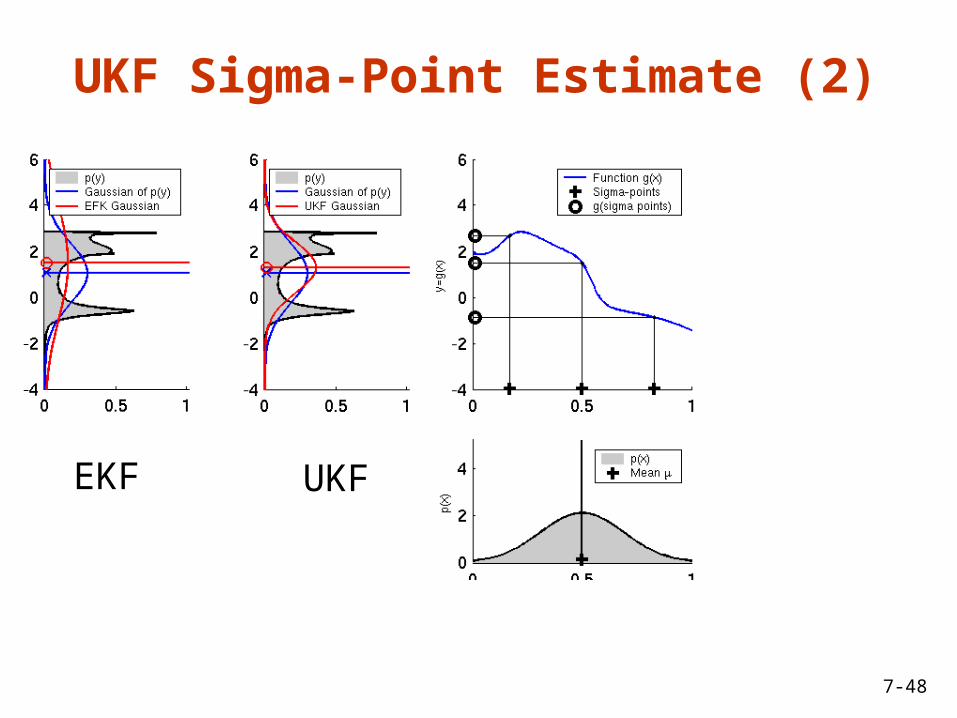
UKF Sigma-Point Estimate (2)
EKF UKF
UKF Sigma-Point Estimate (3)
EKF UKF
Unscented Transform
nin
wwn
nw
nw
ic
imi
i
cm
2,...,1for )(2
1 )(
)1( 2000
Sigma points Weights
)( ii g
n
i
Tiiic
n
i
iim
w
w
2
0
2
0
))(('
'
Pass sigma points through nonlinear function
Recover mean and covariance
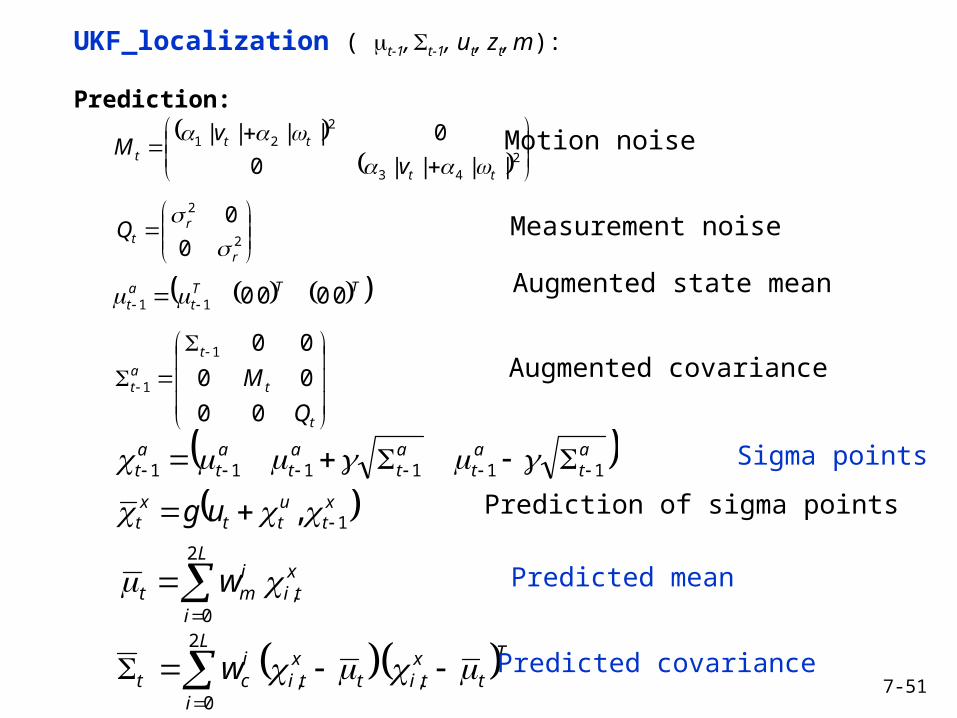
UKF_localization ( mt-1, St-1, ut, zt, m):
Prediction:
2
43
221
||||0
0||||
tt
ttt
v
vM
2
2
0
0
r
rtQ
TTTt
at 000011
t
t
tat
Q
M
00
00
001
1
at
at
at
at
at
at 111111
xt
utt
xt ug 1,
L
i
T
txtit
xti
ict w
2
0,,
L
i
xti
imt w
2
0,
Motion noise
Measurement noise
Augmented state mean
Augmented covariance
Sigma points
Prediction of sigma points
Predicted mean
Predicted covariance
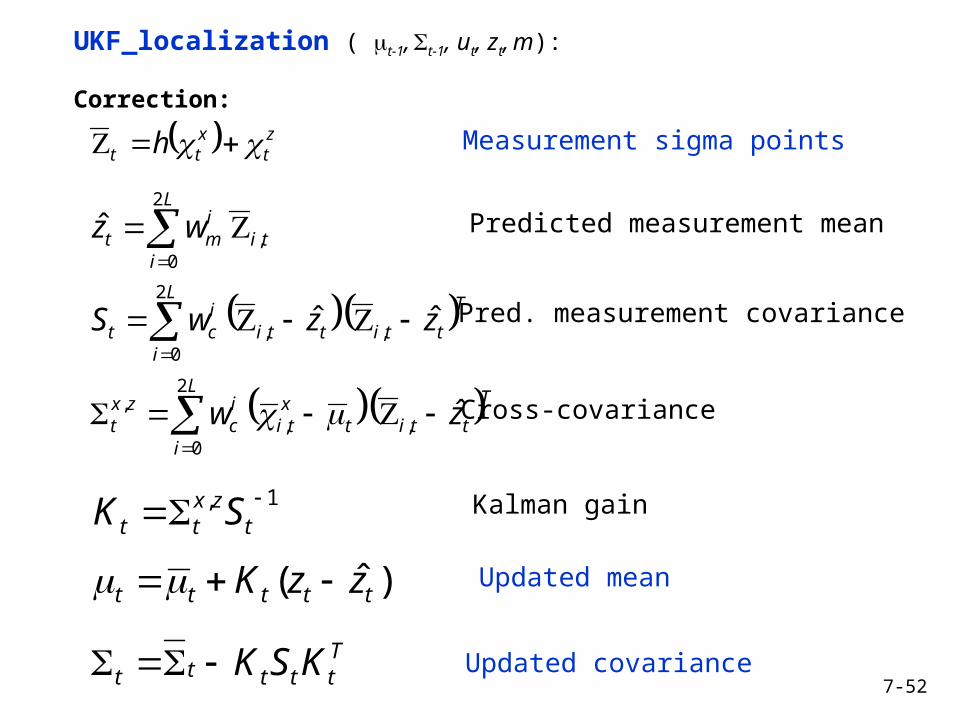
UKF_localization ( mt-1, St-1, ut, zt, m):
Correction:
zt
xtt h
L
iti
imt wz
2
0,ˆ
Measurement sigma points
Predicted measurement mean
Pred. measurement covariance
Cross-covariance
Kalman gain
Updated mean
Updated covariance
Ttti
L
itti
ict zzwS ˆˆ ,
2
0,
Ttti
L
it
xti
ic
zxt zw ˆ,
2
0,
,
1, tzx
tt SK
)ˆ( ttttt zzK
Tttttt KSK
1. EKF_localization ( mt-1, St-1, ut, zt, m):
Correction:
2.
3.
4.
5.
6.
)ˆ( ttttt zzK
tttt HKI
,
,
,
,
,
,),(
t
t
t
t
yt
t
yt
t
xt
t
xt
t
t
tt
rrr
x
mhH
,,,
2,
2,
,2atanˆ
txtxyty
ytyxtxt
mm
mmz
tTtttt QHHS
1 tTttt SHK
2
2
0
0
r
rtQ
Predicted measurement mean
Pred. measurement covariance
Kalman gain
Updated mean
Updated covariance
Jacobian of h w.r.t location
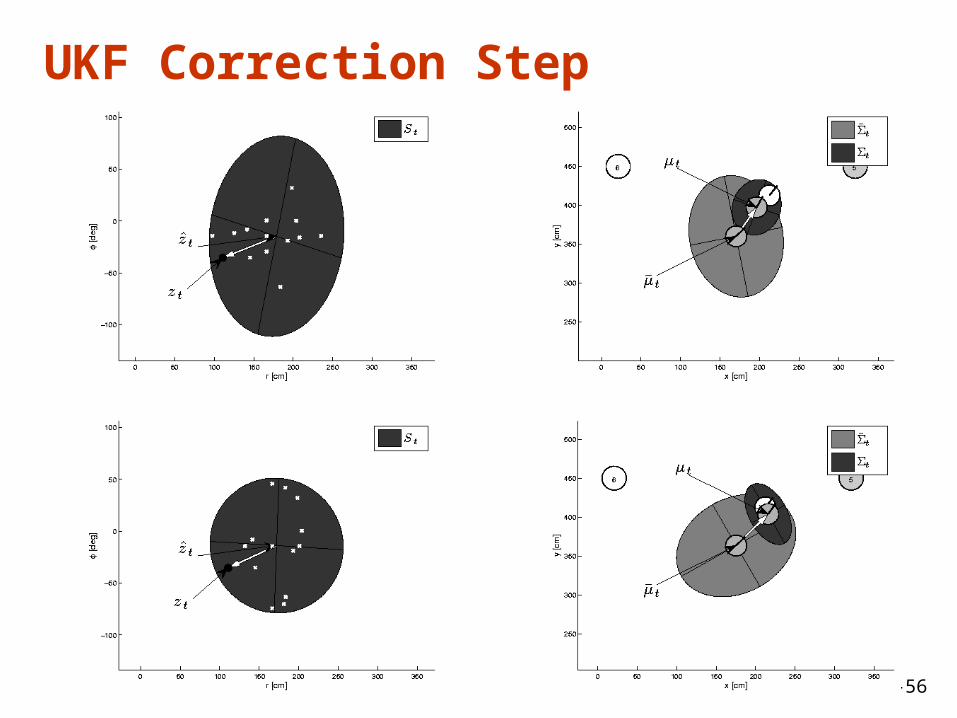
UKF Prediction Step
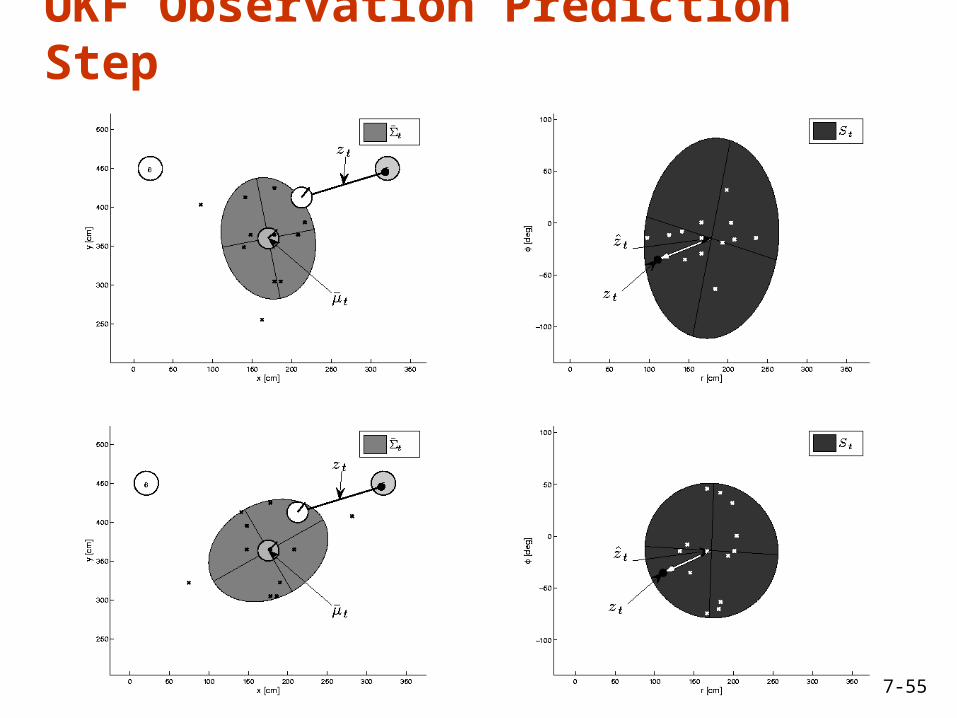
UKF Observation Prediction Step
UKF Correction Step
EKF Correction Step
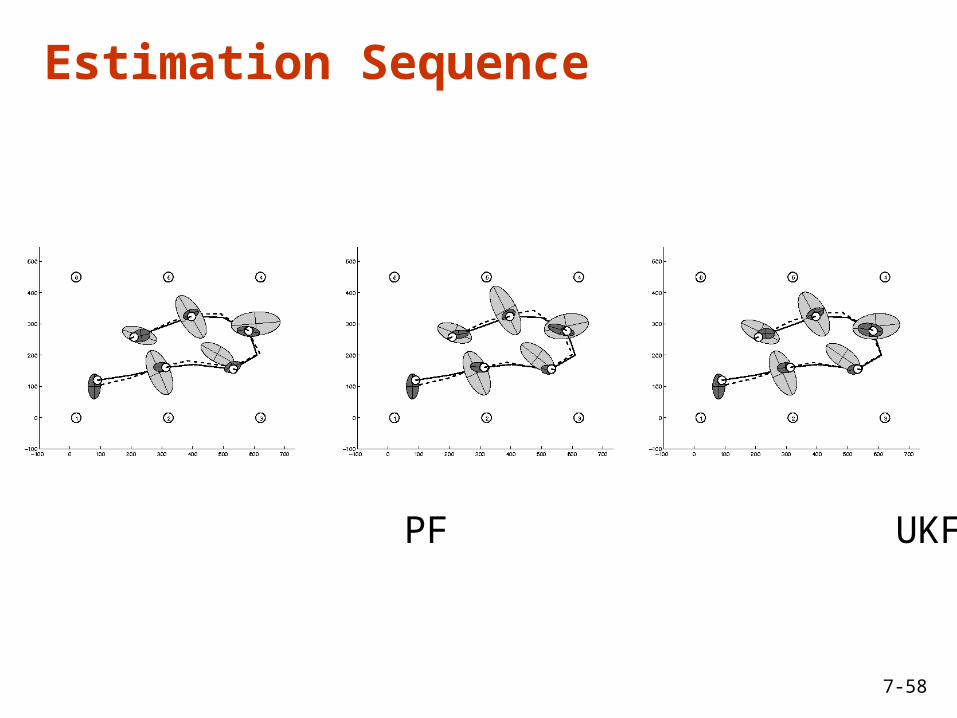
Estimation Sequence
EKF PF UKF
Estimation Sequence
EKF UKF
Prediction Quality
EKF UKF
7-61
UKF Summary
• Highly efficient: Same complexity as EKF, with a constant factor slower in typical practical applications
• Better linearization than EKF: Accurate in first two terms of Taylor expansion (EKF only first term)
• Derivative-free: No Jacobians needed
• Still not optimal!
• [Arras et al. 98]:
• Laser range-finder and vision
• High precision (<1cm accuracy)
Kalman Filter-based System
Courtesy of K. Arras
Multi-hypothesisTracking
• Belief is represented by multiple hypotheses
• Each hypothesis is tracked by a Kalman filter
• Additional problems:
• Data association: Which observation
corresponds to which hypothesis?
• Hypothesis management: When to add / delete
hypotheses?
• Huge body of literature on target tracking, motion
correspondence etc.
Localization With MHT
• Hypotheses are extracted from LRF scans• Each hypothesis has probability of being the correct
one:
• Hypothesis probability is computed using Bayes’ rule
• Hypotheses with low probability are deleted.
• New candidates are extracted from LRF scans.
MHT: Implemented System (1)
)}(,,ˆ{ iiii HPxH
},{ jjj RzC
)(
)()|()|(
sP
HPHsPsHP ii
i
[Jensfelt et al. ’00]
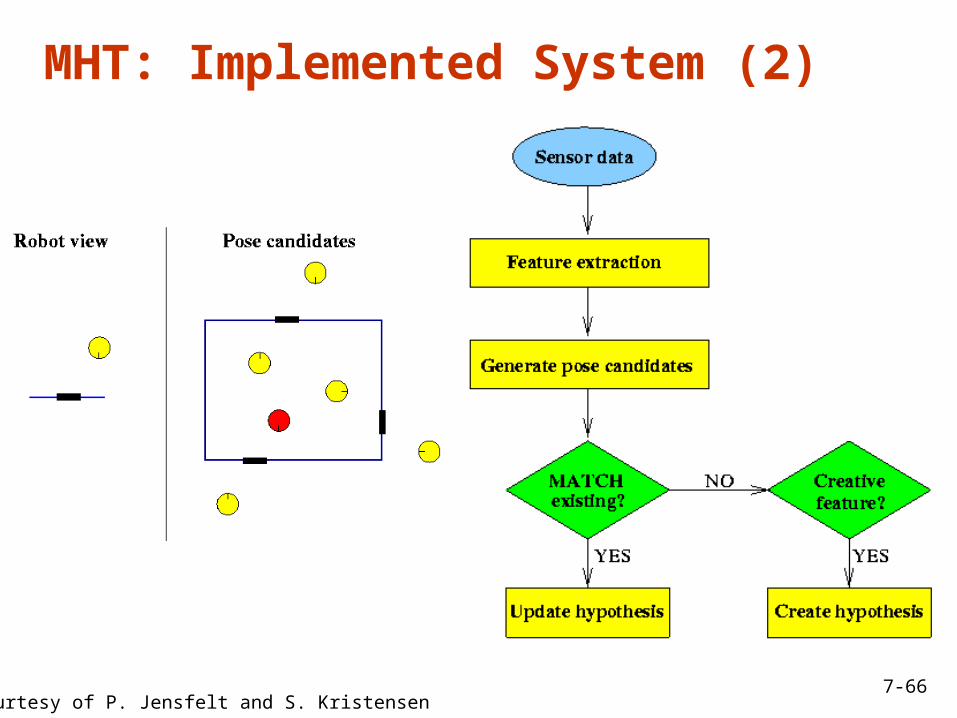
MHT: Implemented System (2)
Courtesy of P. Jensfelt and S. Kristensen
MHT: Implemented System (3)Example run
Map and trajectory
# hypotheses
#hypotheses vs. time
P(Hbest)
Courtesy of P. Jensfelt and S. Kristensen
7-68
Summary: Kalman Filter
• Gaussian Posterior, Gaussian Noise, efficient when applicable
• KF: Motion, Sensing = linear• EKF: nonlinear, uses Taylor expansion• UKF: nonlinear, uses sampling• MHKF: Combines best of Kalman
































































![Efficient Coverage of 3D Environments with Humanoid Robots ...allen/S19/Student_Papers/... · Burget and Bennewitz [ 16 ] applied inverse reachability maps for selecting suitable](https://static.documents.pub/doc/80x56/602016bbcf1ba54e226a8c20/efficient-coverage-of-3d-environments-with-humanoid-robots-allens19studentpapers.jpg)