A Decentralised Coordination Algorithm for Maximising Sensor Coverage in Large Sensor Networks Ruben Stranders, Alex Rogers and Nicholas R. Jennings School of Electronics and Computer Science University of Southampton, UK 1
Transcript
1
A Decentralised Coordination Algorithm for Maximising Sensor Coverage in
Large Sensor NetworksRuben Stranders, Alex Rogers and Nicholas R. Jennings
School of Electronics and Computer ScienceUniversity of Southampton, UK
2
This work is about constructing large sensor networks
Frequency assignment problem
Maintain good sensor quality
Efficient (polynomial time) algorithms
3
These networks consist of many resource constrained sensing devices
Sensor
1. Deployment
4
These networks consist of many resource constrained sensing devices
2. Construct communication network
Radio Link
5
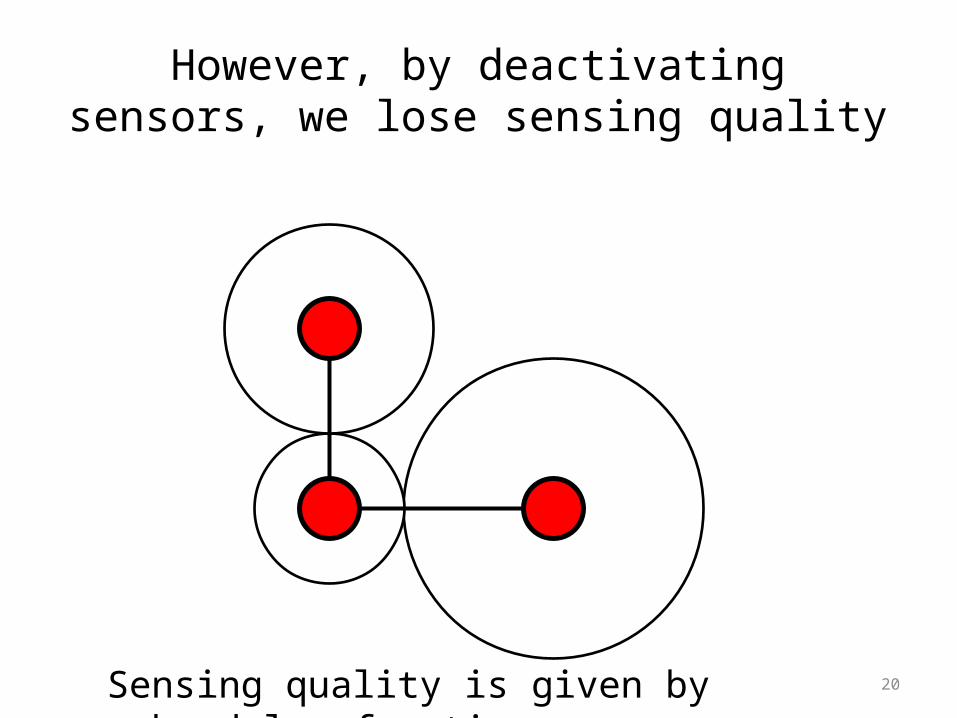
Sensing quality is modelled by a submodular set function
Q({1, 3}) – Q({1}) ≥ Q({1, 2, 3}) – Q({1, 2})Models the diminishing returns of adding a sensor
1 1
33
2
6
Sensing quality is modelled by a submodular set function
Examples (Guestrin 2005):• Mutual Information• Area Coverage• Entropy
1 1
33
2
7
Frequency allocation is one of the key challenges
Equivalent to (multi-agent) graph colouring
Communication graph
8
Frequency allocation is one of the key challenges
Communication graph
9
Frequency allocation is one of the key challenges
Garbled Reception
Colouring the communication graph is not sufficient
10
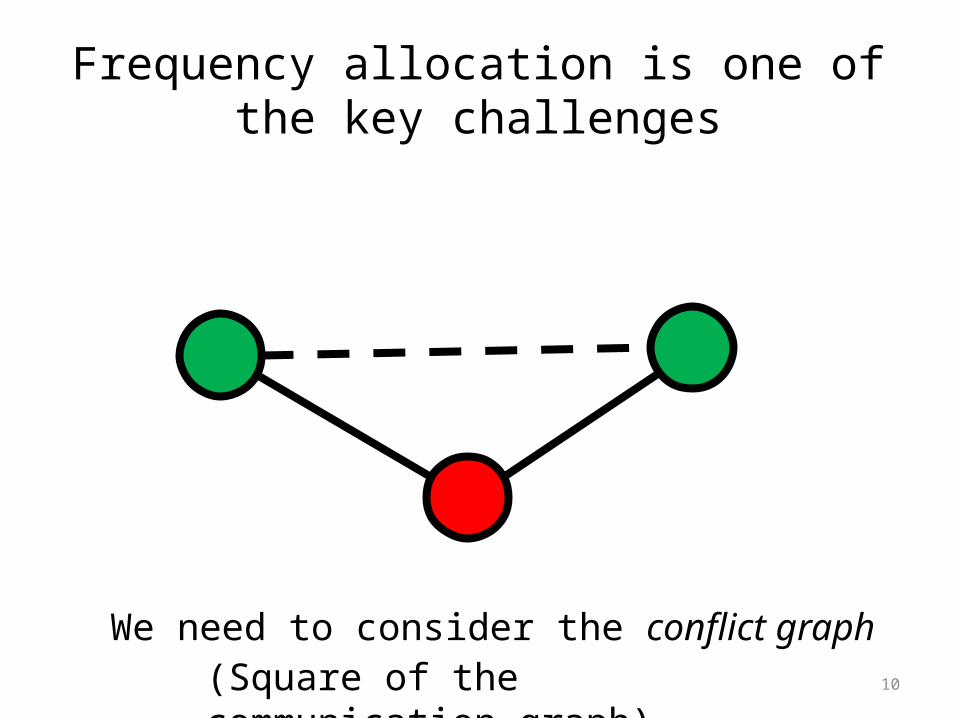
Frequency allocation is one of the key challenges
We need to consider the conflict graph(Square of the communication graph)
11
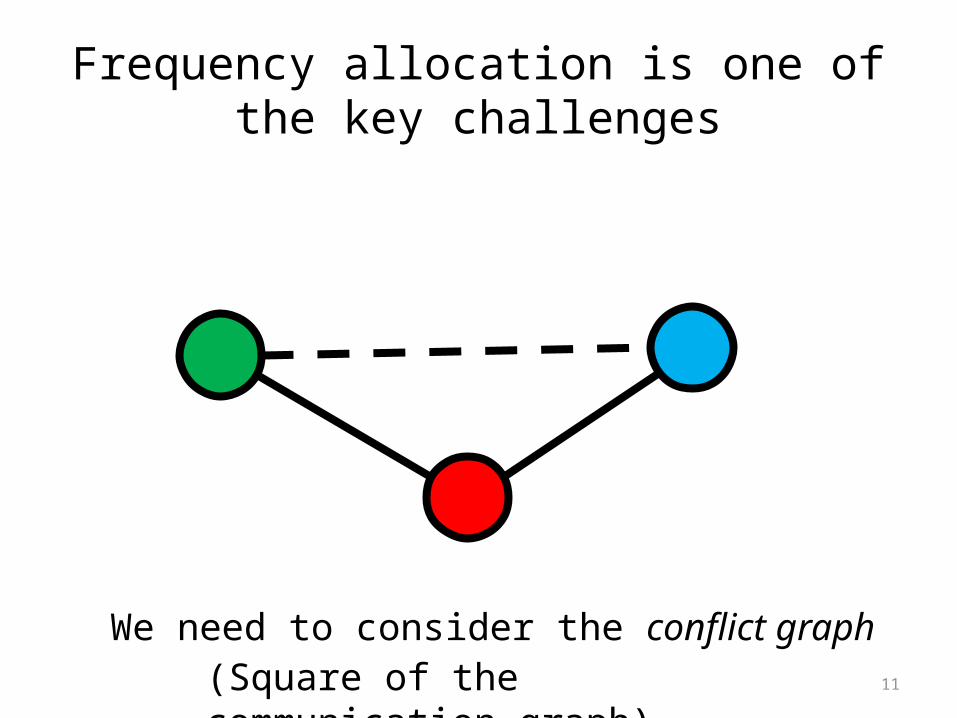
Frequency allocation is one of the key challenges
We need to consider the conflict graph(Square of the communication graph)
12
The frequency allocation is one of the key challenges
Multi-agent graph colouring occurs often in sensor networkse.g. Coordination of sense/sleep cycles
13
Frequency allocation is a difficult challenge for two reasons
1. Might need many frequencies
Reduced bandwidth
2. NP-hard problem Poor approximationsRequires lots of resources
or
14
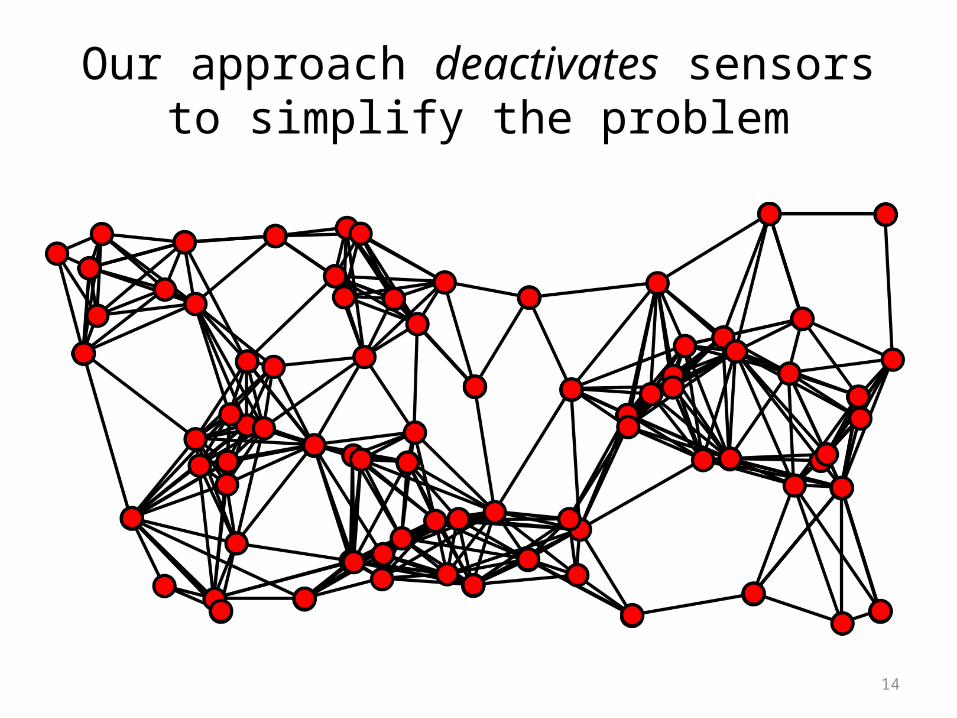
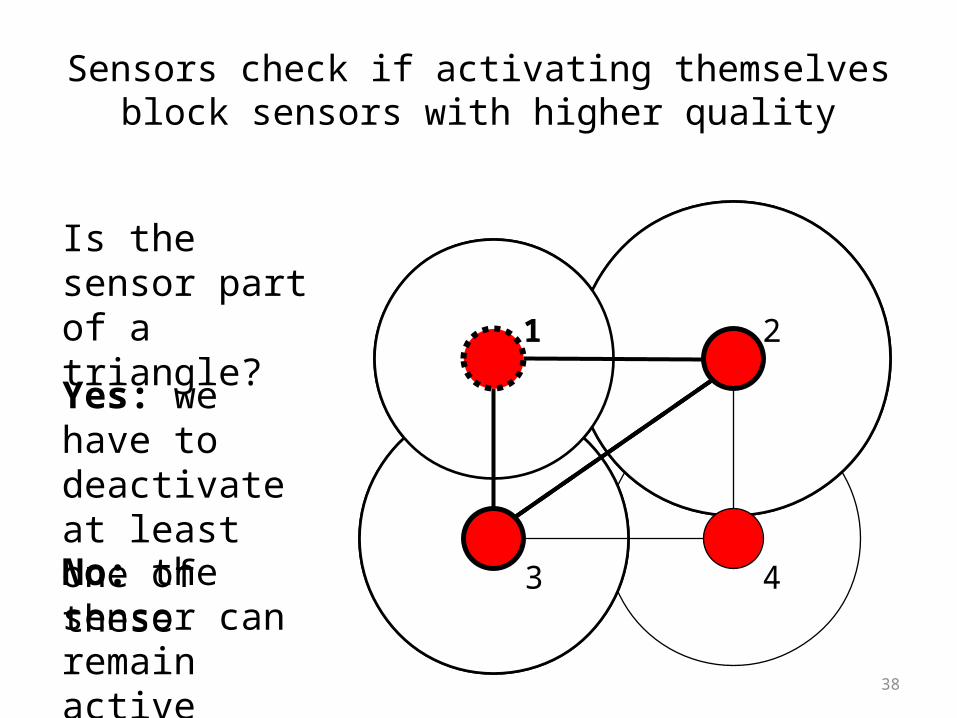
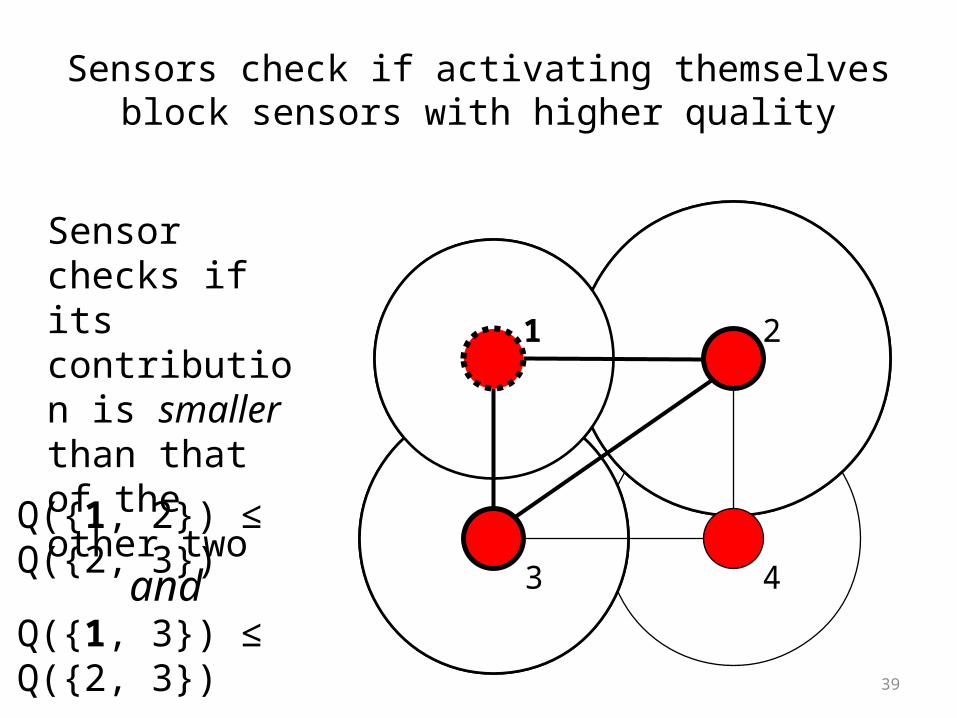
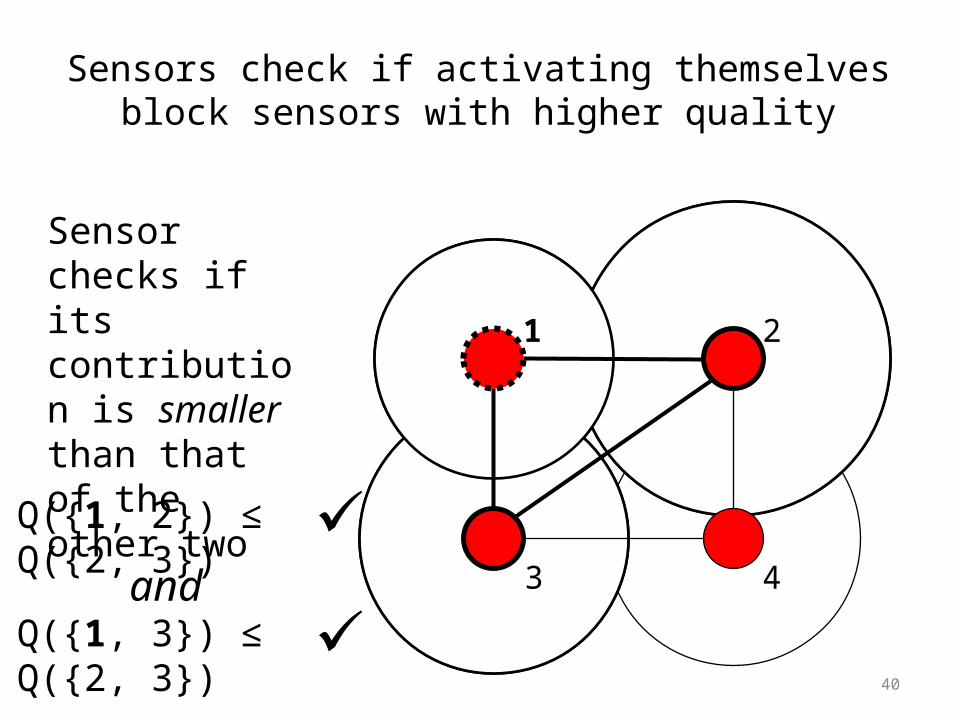
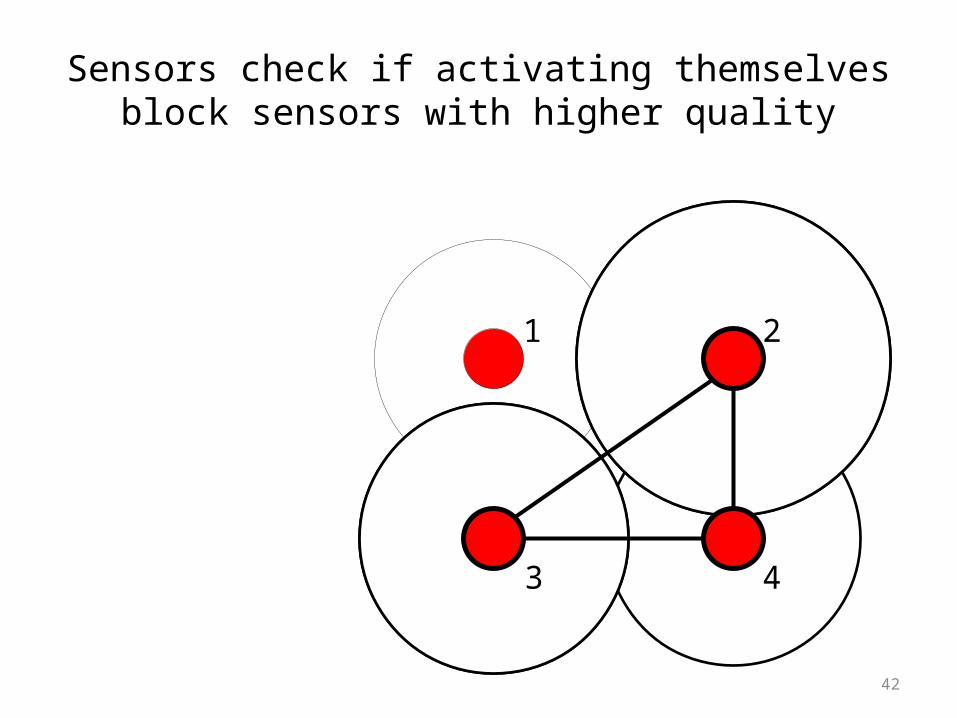
Our approach deactivates sensors to simplify the problem
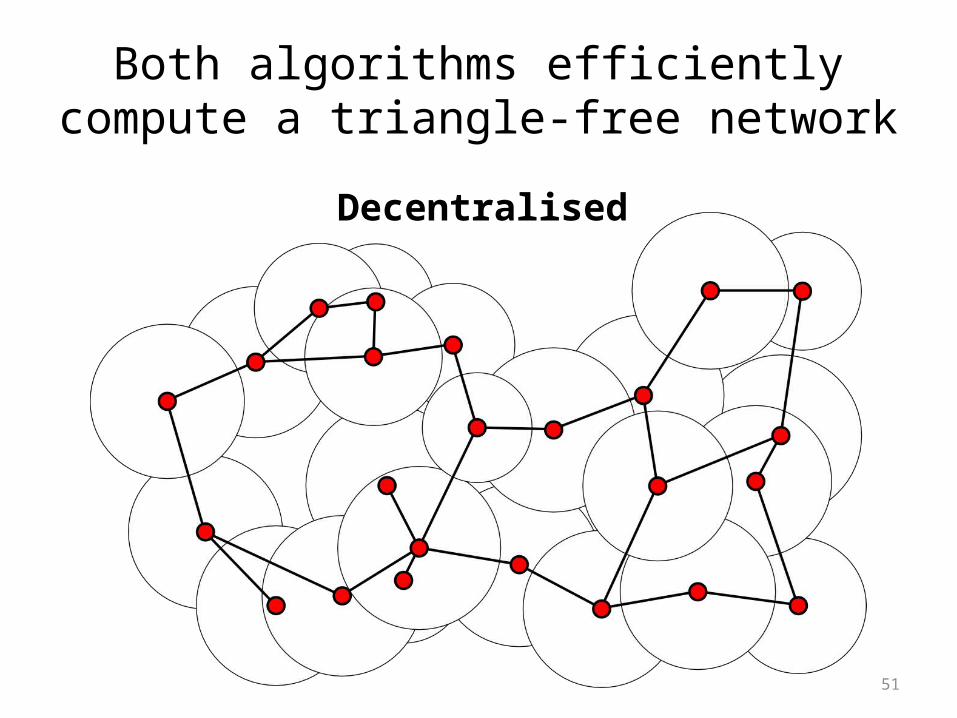
15
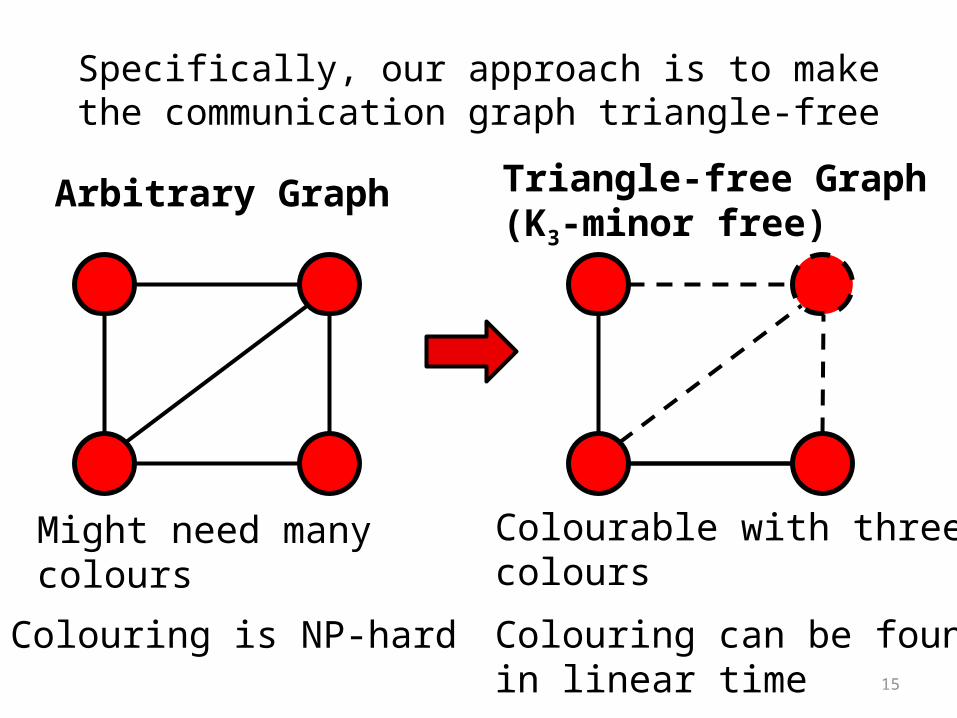
Specifically, our approach is to make the communication graph triangle-free