26
Copyright © TWI Ltd 2014 A Fast Inspection System for Complex Geometry– The Intacom Project Ian Cooper, Ian Nicholson, Ben Wright , Carmelo Mineo (Strathclyde University)

Copyright © TWI Ltd 2014
A Fast Inspection System for Complex Geometry– The
Intacom Project
Ian Cooper, Ian Nicholson, Ben Wright ,
Carmelo Mineo (Strathclyde University)

Copyright © TWI Ltd 2014
The IntaCOM Project
Overview
Robotics
Acquisition
Display
Results
Full Matrix Capture
Copyright © TWI Ltd 2014
IntACom is a £4M , 3 year project aimed at achieving a fourfold increase in the speed of inspection and analysis of complex geometry components
The IntaCOM Project
The project is jointly funded by Rolls-Royce, GKN , Bombardier, TWI and Welsh Government

Copyright © TWI Ltd 2014
Increased use of automation through advanced robotic manipulators
Improved speed of existing systems by integration of advanced techniques
Faster data analysis through data presentation and automated defect recognition
Reduce the inspection time
Copyright © TWI Ltd 2014
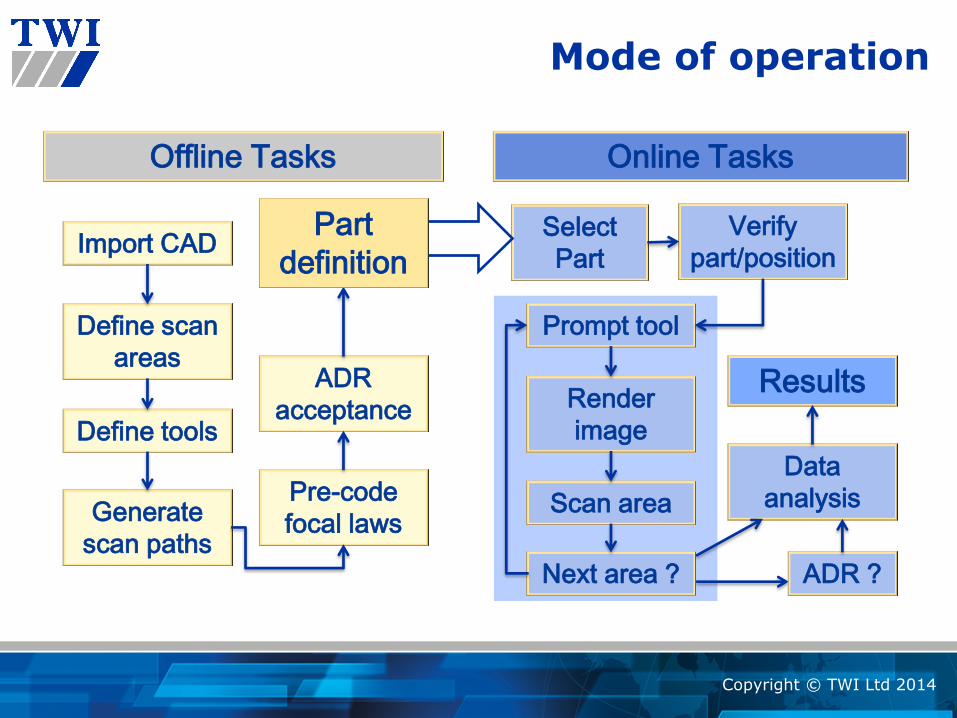
Mode of operation
Online Tasks
Select
Part
Verify
part/position
Prompt tool
Render
image
Scan area
Next area ?
Data
analysis
ADR ?
Results
Offline Tasks
Import CAD
Define scan
areas
Define tools
Generate
scan paths
Pre-code
focal laws
ADR
acceptance
Part
definition
Copyright © TWI Ltd 2014
Prototype must be able to inspect all areas of a 3x1x1m volume
Fully scalable for production
Able to stream positional data at high speed
Work independently or cooperatively
Waterproof to IP 65 (support water irrigation)
Carry end effectors to support PAUT and other methods
Programmable by user via CAD generated scripts and teach pendant
Robotic manipulator specification

Copyright © TWI Ltd 2014
Selected 2 x KUKA KR16 L6-2
Payload : 6 kg Repeatability: <±0.05 mm Controller: KR C4 Water proof: IP65

Copyright © TWI Ltd 2014
64 Element array squirter nozzle
Copyright © TWI Ltd 2014
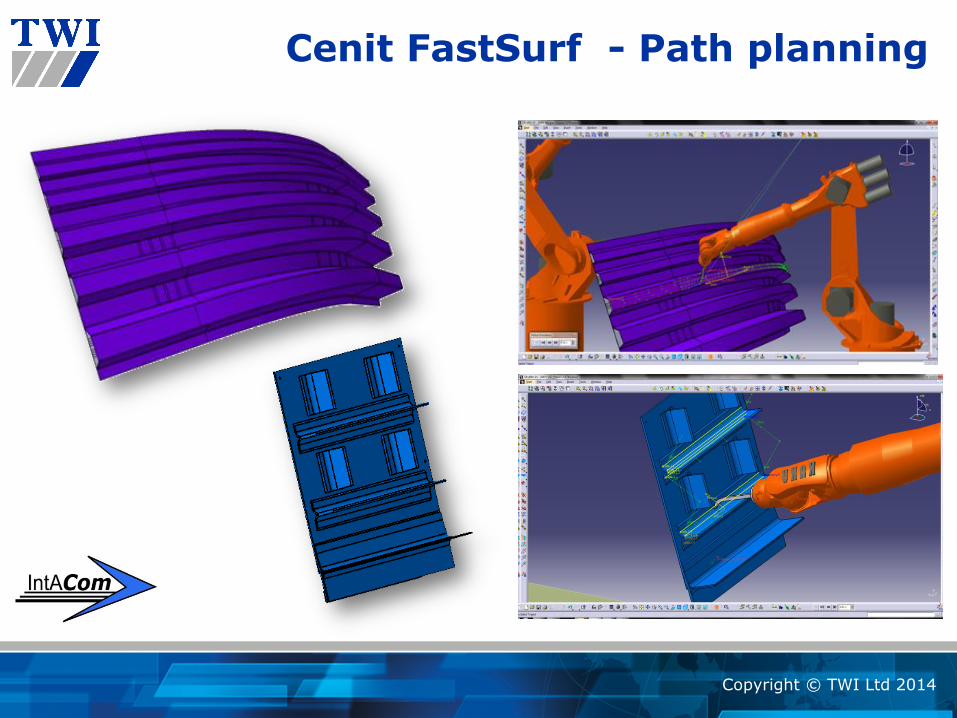
Cenit FastSurf - Path planning

Copyright © TWI Ltd 2014
Scan surface selection

Copyright © TWI Ltd 2014
Probe management

Copyright © TWI Ltd 2014
Speed trials resulted in selection of PEAK NDT Micropulse 5
Must be capable of FMC
Two systems each capable of 128/128
Connectable to allow 256/256 or 128/128 pulse echo or through transmission
Highest possible data acquisition rates
Fully programmable with external software
Pulser/receiver specification
Copyright © TWI Ltd 2014
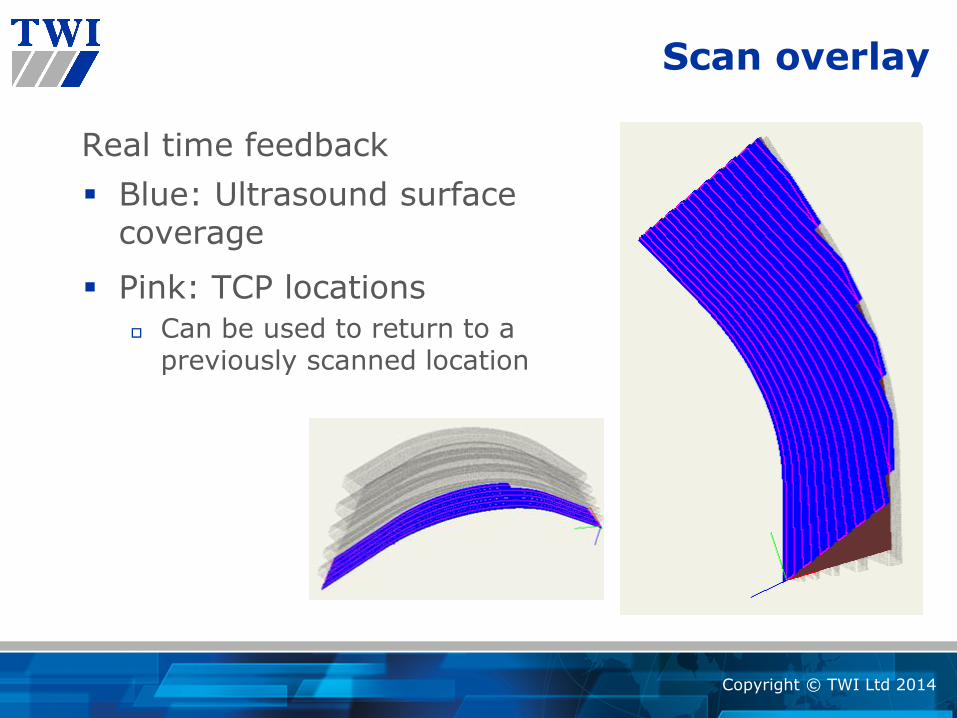
Real time feedback
Scan overlay
Blue: Ultrasound surface coverage
Pink: TCP locations
Can be used to return to a previously scanned location
Copyright © TWI Ltd 2014
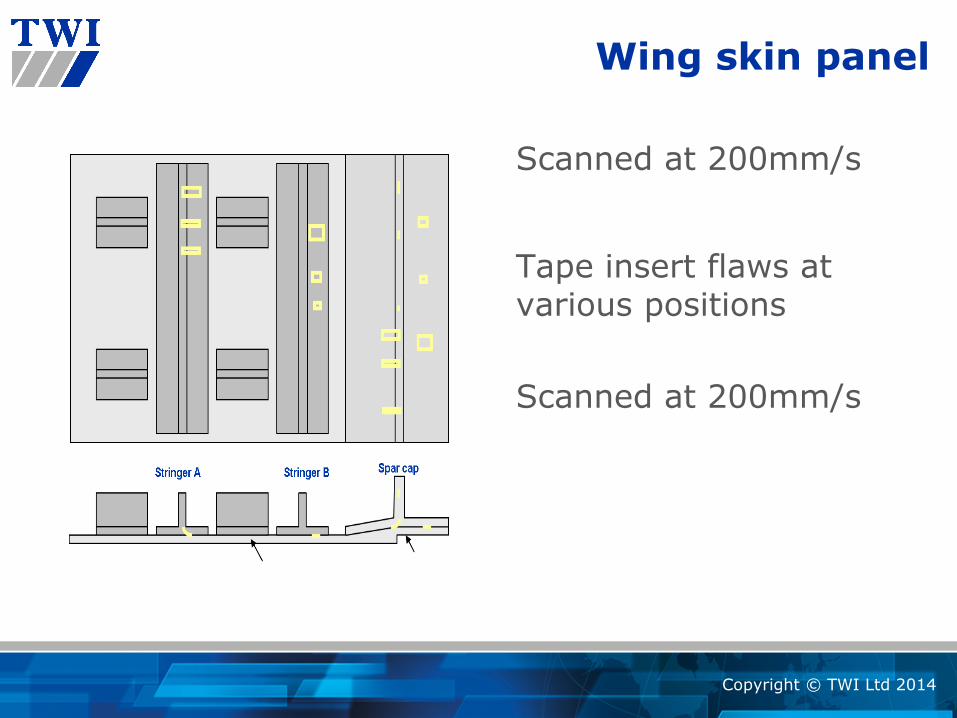
Tape insert flaws at various positions
Scanned at 200mm/s
Wing skin panel
Scanned at 200mm/s

Copyright © TWI Ltd 2014
Options
Full 3D
B-Scan
A-Scan
CAD
TCP
Cursors
Analysis tools

Copyright © TWI Ltd 2014
2.5 x 1m winglet
Scanning of large components

Copyright © TWI Ltd 2014
Water nozzle jet design – Iteration 1
3 x 3mm tape insert

Copyright © TWI Ltd 2014
Interface detection
Many aerospace parts have curved surfaces
Need to compensate for non-zero degree angles formed at ends of large arrays
Pulse on element 1
Receive on elements 1 & 2
Triangulate location of
reflector from
r1, r2 and z
r1 r2
z

Copyright © TWI Ltd 2014
Interface detection

Copyright © TWI Ltd 2014
Complex Geometry

Copyright © TWI Ltd 2014
Hi Res imaging - Full Matrix Capture
1 2 3 4
Transmit (tx)
…
1 2 3 4 N …
1
2
3
4
N
…
N
Re
ce
ive (
rx)
Full Matrix of Data
Transmitting
element
Receiving
element

Copyright © TWI Ltd 2014
Region of interest defined as a grid of pixels
Image Reconstruction
Iterate for all pixels
Each pixel has a contribution from every tx/rx combination

Copyright © TWI Ltd 2014
Inspection of ferritic steel sample
SDHs in mild steel block
Fully focussed throughout l area of interest

Copyright © TWI Ltd 2014
Difficult to inspect component
Wheel encoder
2.25 MHz Probe
25mm 20mm 15mm 10mm 5mm

Copyright © TWI Ltd 2014
Comparison

Copyright © TWI Ltd 2014
Questions?
Thank you for listening
+44 (0)1639 873100
Mob +44 (0)7557 002335

















