FUSION 2010, Edinburgh 1(14) A Gaussian Mixture PHD filter for Extended Target Tracking Karl Granström, Christian Lundquist, Umut Orguner Division of Automatic Control Department of Electrical Engineering Linköping University, Sweden K. Granström, C. Lundquist, U. Orguner A Gaussian Mixture PHD filter for Extended Target Tracking, FUSION 2010 AUTOMATIC CONTROL REGLERTEKNIK LINKÖPINGS UNIVERSITET
Transcript
FUSION 2010, Edinburgh 1(14)
A Gaussian Mixture PHD filter forExtended Target Tracking
Karl Granström, Christian Lundquist,Umut Orguner
Division of Automatic ControlDepartment of Electrical Engineering
Linköping University, Sweden
K. Granström, C. Lundquist, U. Orguner
A Gaussian Mixture PHD filter for Extended Target Tracking, FUSION 2010
AUTOMATIC CONTROLREGLERTEKNIK
LINKÖPINGS UNIVERSITET
Definition: Extended Target Tracking 2(14)
• Extended targets often modelled as having extension or shape.
• All targets have extensions and shapes.• Estimate target size and shape depending on...
1. ...sensor/target setup.2. ...application.
Definition:Extended targets are targets that potentially give riseto more than one measurement per time step.
K. Granström, C. Lundquist, U. Orguner
A Gaussian Mixture PHD filter for Extended Target Tracking, FUSION 2010
AUTOMATIC CONTROLREGLERTEKNIK
LINKÖPINGS UNIVERSITET
Definition: Extended Target Tracking 2(14)
• Extended targets often modelled as having extension or shape.
• All targets have extensions and shapes.• Estimate target size and shape depending on...
1. ...sensor/target setup.2. ...application.
Definition:Extended targets are targets that potentially give riseto more than one measurement per time step.
K. Granström, C. Lundquist, U. Orguner
A Gaussian Mixture PHD filter for Extended Target Tracking, FUSION 2010
AUTOMATIC CONTROLREGLERTEKNIK
LINKÖPINGS UNIVERSITET
Contribution 3(14)
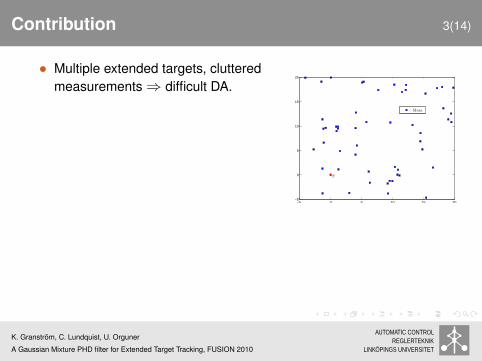
• Multiple extended targets, clutteredmeasurements⇒ difficult DA.
• GM-PHD-filter works well forcluttered measurements[Vo and Ma, IEEE TSP 2006].
• PHD filter for extended targets,Poisson assumption[Mahler, FUSION 2009].
−5 0 5 10 15 20−5
0
5
10
15
20
S
Meas.
Main contribution:Implementation of GM-PHD-filter for extended targets.Minor contribution:Simple method for measurement set partitioning.
K. Granström, C. Lundquist, U. Orguner
A Gaussian Mixture PHD filter for Extended Target Tracking, FUSION 2010
AUTOMATIC CONTROLREGLERTEKNIK
LINKÖPINGS UNIVERSITET
Contribution 3(14)
• Multiple extended targets, clutteredmeasurements⇒ difficult DA.
• GM-PHD-filter works well forcluttered measurements[Vo and Ma, IEEE TSP 2006].
Main contribution:Implementation of GM-PHD-filter for extended targets.Minor contribution:Simple method for measurement set partitioning.
K. Granström, C. Lundquist, U. Orguner
A Gaussian Mixture PHD filter for Extended Target Tracking, FUSION 2010
AUTOMATIC CONTROLREGLERTEKNIK
LINKÖPINGS UNIVERSITET
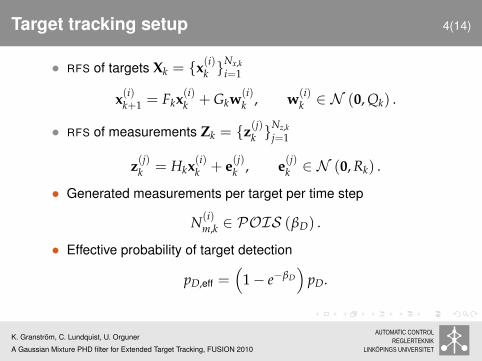
Target tracking setup 4(14)
• RFS of targets Xk = {x(i)k }
Nx,ki=1
x(i)k+1 = Fkx(i)k + Gkw(i)k , w(i)
k ∈ N (0, Qk) .
• RFS of measurements Zk = {z(j)k }
Nz,kj=1
z(j)k = Hkx(i)k + e(j)k , e(j)k ∈ N (0, Rk) .
• Generated measurements per target per time step
N(i)m,k ∈ POIS (βD) .
• Effective probability of target detection
pD,eff =(
1− e−βD)
pD.
K. Granström, C. Lundquist, U. Orguner
A Gaussian Mixture PHD filter for Extended Target Tracking, FUSION 2010
AUTOMATIC CONTROLREGLERTEKNIK
LINKÖPINGS UNIVERSITET
Target tracking setup 4(14)
• RFS of targets Xk = {x(i)k }
Nx,ki=1
x(i)k+1 = Fkx(i)k + Gkw(i)k , w(i)
k ∈ N (0, Qk) .
• RFS of measurements Zk = {z(j)k }
Nz,kj=1
z(j)k = Hkx(i)k + e(j)k , e(j)k ∈ N (0, Rk) .
• Generated measurements per target per time step
N(i)m,k ∈ POIS (βD) .
• Effective probability of target detection
pD,eff =(
1− e−βD)
pD.
K. Granström, C. Lundquist, U. Orguner
A Gaussian Mixture PHD filter for Extended Target Tracking, FUSION 2010
AUTOMATIC CONTROLREGLERTEKNIK
LINKÖPINGS UNIVERSITET
Measurement Pseudo Likelihood 5(14)
• Prediction of PHD-intensity performed identically to[Vo and Ma, 2006].
• vk|k−1 (x|Z) is predicted PHD-intensity. Corrected PHD-intensity
vk|k (x|Z) = LZk (x) vk|k−1 (x|Z) ,
where measurement pseudo-likelihood is given by
LZk (x) =1−(
1− e−γ(x))
pD (x) +
e−γ(x)pD (x) ∑p∠Zk
ωp ∑W∈p
γ (x)|W|
dW· ∏
z∈W
φz (x)λkck (z)
.
[Mahler, 2009]
K. Granström, C. Lundquist, U. Orguner
A Gaussian Mixture PHD filter for Extended Target Tracking, FUSION 2010
AUTOMATIC CONTROLREGLERTEKNIK
LINKÖPINGS UNIVERSITET
Additional assumption 6(14)
• Six assumptions made in derivation of GM-PHD
[Vo and Ma, 2006].
• Additional assumption:The expected number of generated measurements γ (x) can beapproximated as functions of the means of the individualGaussian components
γ(j) , γ(
m(j)k|k−1
).
K. Granström, C. Lundquist, U. Orguner
A Gaussian Mixture PHD filter for Extended Target Tracking, FUSION 2010
AUTOMATIC CONTROLREGLERTEKNIK
LINKÖPINGS UNIVERSITET
Partitioning the measurements 7(14)
• In each time step Zk must be partitioned.
• A partition p is a division of Zk into cells W.
• Important since more than one measurement can stem from thesame target.
K. Granström, C. Lundquist, U. Orguner
A Gaussian Mixture PHD filter for Extended Target Tracking, FUSION 2010
AUTOMATIC CONTROLREGLERTEKNIK
LINKÖPINGS UNIVERSITET
Partitioning the measurements — example 8(14)
Partition the measurement set Zk ={
z(1)k , z(2)k , z(3)k
}
−0.5 0 0.5 1 1.5−0.5
0
0.5
1
1.5
z(1)kz
(2)k
z(3)k
Z
x
y
−0.5 0 0.5 1 1.5−0.5
0
0.5
1
1.5
W 11
p1
xy
−0.5 0 0.5 1 1.5−0.5
0
0.5
1
1.5
W 21
W 22
p2
x
y
−0.5 0 0.5 1 1.5−0.5
0
0.5
1
1.5
W 31
W 32
p3
x
y
−0.5 0 0.5 1 1.5−0.5
0
0.5
1
1.5
W 41
W 42
p4
x
y
−0.5 0 0.5 1 1.5−0.5
0
0.5
1
1.5
W 51
W 52
W 53
p5
x
y
K. Granström, C. Lundquist, U. Orguner
A Gaussian Mixture PHD filter for Extended Target Tracking, FUSION 2010
AUTOMATIC CONTROLREGLERTEKNIK
LINKÖPINGS UNIVERSITET
Partitioning method 9(14)
• Measurements belong to same cell W if distance is “small”.• “Small” measured by Mahalanobis distance
(z(1)k − z(2)k )TR−1k (z(1)k − z(2)k ) < δPG
for some gate probability PG.
• With Rk = σ2e I2 this reduces to∥∥∥z(1)k − z(2)k
∥∥∥2< σe
√δPG = di.
• Let {dmi }
Ndi=1 be set of measurement to measurement distances.
• Good partitions for di corresponding to
σe√
δ0.30 ≤ dmi < σe
√δ0.80
K. Granström, C. Lundquist, U. Orguner
A Gaussian Mixture PHD filter for Extended Target Tracking, FUSION 2010
AUTOMATIC CONTROLREGLERTEKNIK
LINKÖPINGS UNIVERSITET
Partitioning method 9(14)
• Measurements belong to same cell W if distance is “small”.• “Small” measured by Mahalanobis distance
(z(1)k − z(2)k )TR−1k (z(1)k − z(2)k ) < δPG
for some gate probability PG.• With Rk = σ2
e I2 this reduces to∥∥∥z(1)k − z(2)k
∥∥∥2< σe
√δPG = di.
• Let {dmi }
Ndi=1 be set of measurement to measurement distances.
• Good partitions for di corresponding to
σe√
δ0.30 ≤ dmi < σe
√δ0.80
K. Granström, C. Lundquist, U. Orguner
A Gaussian Mixture PHD filter for Extended Target Tracking, FUSION 2010
AUTOMATIC CONTROLREGLERTEKNIK
LINKÖPINGS UNIVERSITET
Partitioning method — example 10(14)
0 100 200 300
50
100
150
200
250
300
Measurements
X [m]
Y [m
]
0 100 200 3000
100
200
300
d = 14.9927
X [m]
Y [m
]
0 100 200 3000
100
200
300
d = 26.3491
X [m]
Y [m
]
0 100 200 3000
100
200
300
d = 43.5245
X [m]
Y [m
]
0 100 200 3000
100
200
300
d = 59.5143
X [m]
Y [m
]
0 100 200 3000
100
200
300
d = 62.9965
X [m]Y
[m]
K. Granström, C. Lundquist, U. Orguner
A Gaussian Mixture PHD filter for Extended Target Tracking, FUSION 2010
AUTOMATIC CONTROLREGLERTEKNIK
LINKÖPINGS UNIVERSITET
Simulation — Measurements 11(14)
0 10 20 30 40 50 60 70 80 90 100−1000
−500
0
500
1000
Time
X [
m]
True vs measured
0 10 20 30 40 50 60 70 80 90 100−1000
−500
0
500
1000
Time
Y [
m]
True vs measured
• True target track crossing at time k = 56.
• New target birth and target spawned at time k = 66.
K. Granström, C. Lundquist, U. Orguner
A Gaussian Mixture PHD filter for Extended Target Tracking, FUSION 2010
AUTOMATIC CONTROLREGLERTEKNIK
LINKÖPINGS UNIVERSITET
Simulation — Tracking performance 12(14)
0 10 20 30 40 50 60 70 80 90 100−400
−200
0
200
400
600
800
1000
Time
X [m
]
True vs extracted
0 10 20 30 40 50 60 70 80 90 100−1000
−500
0
500
Time
Y [m
]
True vs extracted
0 10 20 30 40 50 60 70 80 90 100−400
−200
0
200
400
600
800
1000
Time
X [m
]
True vs extracted
0 10 20 30 40 50 60 70 80 90 100−1000
−500
0
500
Time
Y [m
]
True vs extracted
0 10 20 30 40 50 60 70 80 90 1001
1.5
2
2.5
3
3.5
4
Time
No. ta
rgets
True vs extracted
0 10 20 30 40 50 60 70 80 90 1000
10
20
30
40
50
60
Time
No. ta
rgets
True vs extracted
Extended target GM-PHD Standard GM-PHD
K. Granström, C. Lundquist, U. Orguner
A Gaussian Mixture PHD filter for Extended Target Tracking, FUSION 2010
AUTOMATIC CONTROLREGLERTEKNIK
LINKÖPINGS UNIVERSITET
Conclusions 13(14)
Main contribution:Implementation of GM-PHD-filter for extended targets.Minor contribution:Simple method for measurement set partitioning.
The suggested implementation handles...
• ...unknown number of targets.
• ...extended target measurements.
• ...cluttered measurement sets.
Matlab code used for simulations in paper available onlinehttp://www.control.isy.liu.se/publications/doc?id=2299
K. Granström, C. Lundquist, U. Orguner
A Gaussian Mixture PHD filter for Extended Target Tracking, FUSION 2010
AUTOMATIC CONTROLREGLERTEKNIK
LINKÖPINGS UNIVERSITET
The End 14(14)
Thank you for listening!
Any questions?
Matlab code used for simulations in paper available onlinehttp://www.control.isy.liu.se/publications/doc?id=2299
K. Granström, C. Lundquist, U. Orguner
A Gaussian Mixture PHD filter for Extended Target Tracking, FUSION 2010