A necessary condition for controllability of a network Known results for LTI networks with static linear couplings A necessary and sufficient condition for LTI networks A little counting game A general necessary and sufficient condition for controllability of networks of linear systems Jochen Trumpf (joint work with Harry Trentelman) in memory of Uwe Helmke Sde Boker March 2017 J. Trumpf, H.L. Trentelman Network controllability
Transcript
A necessary condition for controllability of a networkKnown results for LTI networks with static linear couplings
A necessary and sufficient condition for LTI networksA little counting game
A general necessary and sufficient condition forcontrollability of networks of linear systems
Jochen Trumpf (joint work with Harry Trentelman)
in memory of Uwe Helmke
Sde Boker
March 2017
J. Trumpf, H.L. Trentelman Network controllability
A necessary condition for controllability of a networkKnown results for LTI networks with static linear couplings
A necessary and sufficient condition for LTI networksA little counting game
Outline
1 A necessary condition for controllability of a network
2 Known results for LTI networks with static linear couplings
3 A necessary and sufficient condition for LTI networks
4 A little counting game
J. Trumpf, H.L. Trentelman Network controllability
A necessary condition for controllability of a networkKnown results for LTI networks with static linear couplings
A necessary and sufficient condition for LTI networksA little counting game
A network
Controllability: For all xs =
(x (1)
x (2)
)s
, xf =
(x (1)
x (2)
)f
and ts
there exist tf and u1|[ts ,tf ] such that x(tf ; xs , ts , u1) = xf .
J. Trumpf, H.L. Trentelman Network controllability
A necessary condition for controllability of a networkKnown results for LTI networks with static linear couplings
A necessary and sufficient condition for LTI networksA little counting game
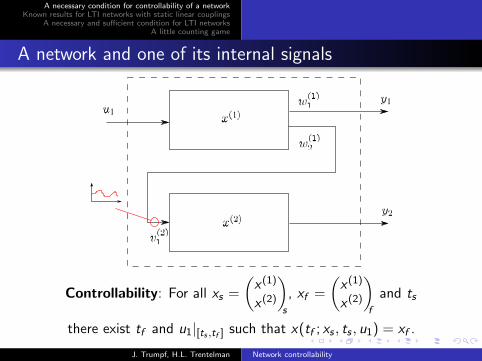
A network and one of its internal signals
Controllability: For all xs =
(x (1)
x (2)
)s
, xf =
(x (1)
x (2)
)f
and ts
there exist tf and u1|[ts ,tf ] such that x(tf ; xs , ts , u1) = xf .
J. Trumpf, H.L. Trentelman Network controllability
A necessary condition for controllability of a networkKnown results for LTI networks with static linear couplings
A necessary and sufficient condition for LTI networksA little counting game
A network and one of its node systems
Controllability: For all xs =
(x (1)
x (2)
)s
, xf =
(x (1)
x (2)
)f
and ts
there exist tf and u1|[ts ,tf ] such that x(tf ; xs , ts , u1) = xf .
J. Trumpf, H.L. Trentelman Network controllability
A necessary condition for controllability of a networkKnown results for LTI networks with static linear couplings
A necessary and sufficient condition for LTI networksA little counting game
A first result
Theorem: If an i/o-coupled network of i/s/o systems iscontrollable then each of the node systems is controllable.
Remark: This does not quite follow from the fact thatcontrollability is hereditary under behavior projection.
J. Trumpf, H.L. Trentelman Network controllability
A necessary condition for controllability of a networkKnown results for LTI networks with static linear couplings
A necessary and sufficient condition for LTI networksA little counting game
LTI networks with static linear couplings
Node systems (i = 1, . . . ,N)
x (i) = α(i)x (i) + β(i)v (i), x (i) ∈ Rni , v (i) ∈ Rmi
w (i) = γ(i)x (i), w (i) ∈ Rpi
Static linear couplings with external input [and output]
v (i) =∑j
Aijw(j) + Biu, u ∈ Rm
y =∑i
Ciw(i), y ∈ Rp
J. Trumpf, H.L. Trentelman Network controllability
A necessary condition for controllability of a networkKnown results for LTI networks with static linear couplings
A necessary and sufficient condition for LTI networksA little counting game
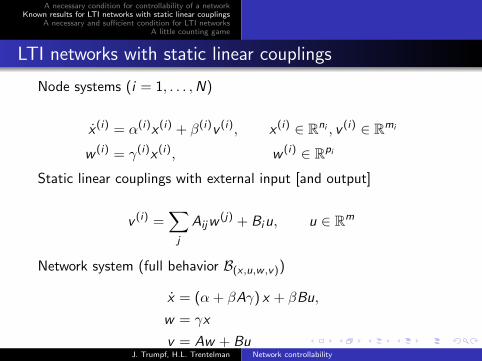
LTI networks with static linear couplings
Node systems (i = 1, . . . ,N)
x (i) = α(i)x (i) + β(i)v (i), x (i) ∈ Rni , v (i) ∈ Rmi
w (i) = γ(i)x (i), w (i) ∈ Rpi
Static linear couplings with external input [and output]
v (i) =∑j
Aijw(j) + Biu, u ∈ Rm
Network system (full behavior B(x ,u,w ,v))
x = (α + βAγ) x + βBu,
w = γx
v = Aw + BuJ. Trumpf, H.L. Trentelman Network controllability
A necessary condition for controllability of a networkKnown results for LTI networks with static linear couplings
A necessary and sufficient condition for LTI networksA little counting game