Page 1
1
A Multi-agent Evolutionary Algorithm for Software
Module Clustering Problems
Jinhuang Huang, Jing Liu1
Key Laboratory of Intelligent Perception and Image Understanding of Ministry of Education,
Xidian University, Xi’an 710071, China
Xin Yao
Centre of Excellence for Research in Computational Intelligence and Applications (CERCIA),
School of Computer Science, The University of Birmingham, Birmingham B15 2TT, U.K.
Abstract: The aim of software module clustering problems (SMCPs) is to automatically find a good quality
clustering of software modules based on relationships among modules. In this paper, we propose a
multi-agent evolutionary algorithm to solve this problem, labeled as MAEA-SMCPs. With the intrinsic
properties of SMCPs in mind, three evolutionary operators are designed for agents to realize the purpose of
competition, cooperation and self-learning. In the experiments, practical problems are used to validate the
performance of MAEA-SMCPs. The results show that MAEA-SMCPs can find clusters with high quality
and small deviations. The comparison results also show that MAEA-SMCPs outperforms two existing
multi-objective algorithms, namely MCA and ECA, and two existing single-objective algorithms, namely
GGA and GNE, in terms of MQ.
Keywords: Software module clustering, multi-agent evolutionary algorithm, modularization quality.
1. Introduction
It is generally known that good modularization of software leads to systems that are easier
to design, develop, test, maintain, and evolve [1], [17]. However, it becomes difficult for large
software systems, especially they are not documented well [18], [24]. In general, a software
module clustering problem (SMCP) can be described as a problem to find a particular set of
modules, which is organized into clusters according to predefined criteria [2]. The problem of
finding the best clustering for a given set of modules is an NP hard problem [3]; that is, it is
1Corresponding author. For additional information regarding this paper, please contact Jing Liu, e-mail: [email protected] ,
homepage: http://see.xidian.edu.cn/faculty/liujing/
Page 2
2
impossible to exhaustively search for the best clustering but to estimate the goodness of a
cluster.
Mancoridis et al., who first suggested the search-based approach to module clustering [4],
formulates the attributes of a good modular decomposition as objectives, the evaluation of
which as a “fitness function” guides a search-based optimization algorithm. In this work, they
developed a tool called Bunch for automated software module clustering. Afterwards, guided
by the concept of search-based approaches, many heuristics methods have been proposed to
solve SMCPs, such as hill-climbing techniques, genetic algorithms and simulated annealing,
and so forth [3], [5], [6], [7], [10], [18], [19], [20], [21]. All these studies indicate that the
hill-climbing algorithm has performed the best in terms of both the solution quality and
execution time [8]. To guide the process of searching, an objective function is needed to
evaluate the objectives. In the software domain, the Modularization Quality (MQ) [30], which
is based on the trade-off between inter- and intra- connectivity, has been widely used as the
objective function.
Bunch includes a complete automated clustering engine and executes a set of
meta-heuristic clustering algorithms [30]. This approach partitions each level of subsystems
from the top level, the whole system is partitioned as subsystems at a high level. Finally, the
clustered system with the highest quality would be produced by the detailed level. It turns out
to be effective for large systems [3]. However, the shortcoming of hill-climbing methods is
premature convergence, which leads to local optima [6]. An attempt to overcome this problem
was a multiple hill-climbing approach ([6], [9]). Praditwong et al. [10] have proposed two
evolutionary algorithms, namely GGA and GNE, to solve SMCPs. They have obtained
comparatively good averaged MQ values, but they ignored the cohesion and coupling which
are significant measures of a software system. Praditwong et al. [11] also modeled the SMCP
as a multi-objective search problem and use evolutionary algorithms [25] to solve it, namely
MCA and ECA. MCA and ECA consider MQ, intra-edges and inter-edges as the objectives,
and obtained good results compared with other single-objective algorithms. Besides the MQ
measure, there are many other measures for SMCPs, such as EVM [31]. We choose MQ as
the primary measure in this paper as it is widely used for SMCPs.
In our previous work, a multi-agent genetic algorithm (MAGA) was proposed for
Page 3
3
large-scale global numerical optimization [12]. MAGA integrated multi-agent systems with
GAs, and can optimize functions with 10000 dimensions, which is the first GA that can solve
functions with such high dimensions. It is also extended to solve constraint satisfaction
problems and combinatorial optimization problems successfully [13], [14]. Since MAGA
showed a good performance, we propose a multi-agent evolutionary algorithm to solve
SMCPs, labeled as MAEA-SMCPs.
With the intrinsic properties of SMCPs in mind, three evolutionary operators, namely the
neighborhood competition operator, the mutation operator and the self-learning operator are
designed. In MAEA-SMCPs, all agents live in a lattice-like environment. During the process
of interacting with the environment and the other agents, each agent increases energy (fitness)
as much as possible, so that MAEA-SMCPs can find the optima. In the experiments, a set of
problems extracted from real-world software with varying sizes are used to validate the
performance of MAEA-SMCPs. The experimental results show that MAEA-SMCPs has a
good performance, and outperforms other algorithms, such as GGA, GNE, MCA and ECA, in
terms of MQ.
The rest of this paper is organized as follows. Section 2 describes the SMCPs. Section 3
introduces the MAEA-SMCPs in detail. The experiments are given in Section 4. Finally, the
conclusions are given in Section 5.
2. Software Module Clustering Problems
Clustering provides the properties of groups instead of individuals within them [10].
Besides, clustering could not only reveal the internal relations and differences among data, but
also provide important basis for further analysis of data and discovery of knowledge. In
recently years, clustering methods have been widely used to assist analysis and
comprehension of software systems.
In an SMCP, a Module Dependency Graph (MDG) [4], which is a directed graph, has been
used as a representation of the problem. In MDGs, a vertex stands for a module (e.g.
Functions, sources files) in software system and a link, or an arc, stands for a relation (e.g.
Function calls) between two modules [26], [27], [28], [29]. The MDG file contains modules
Page 4
4
and their relationships in the software system as a list of from-to-weighted information [6].
According to the characterization of edges, MDGs can be categorized into two types, the one
with and without weighted edges. If the edges of the MDG associate with positive number,
called weights, then the MDG is weighted; otherwise, it is unweighted.
Suppose an MDG is labeled as G = (V, E), where V={v1, v2, …, vn} is the set of n modules
and E is the set of links between modules. All modules need to be divided into k
non-overlapping clusters C1, C2, …, Ck; that is, C1∪C2∪...∪Ck=V, Ci≠∅ and Ci∩Cj=∅, i, j=1,
2, …, k, and i≠j. The purpose of SMCPs is to get clusters that are both densely intra-connected
and sparsely inter-connected.
There are two primitive principles of software design: coupling and cohesion. Coupling is a
measure of the degree to which clusters are related to other clusters, and cohesion denotes the
close relationship between components or modules within the same clusters [15], [21]. The
MDG partitioning, introduced above, tries to represent clusters of systems, which are
cohesive modules in the clusters and loosely connection between clusters [3].
Basic Modularization Quality (Basic MQ) was proposed in Bunch as a fitness function [3].
The Basic MQ is a metric which represents maximizing intra-edges and minimizing
inter-edges, where the intra-edge is a link between modules in the same cluster and the
inter-edge is a link between a module in a cluster and a module in another cluster. MQ is the
sum of the ratio of intra-edges and inter-edges in each cluster, called the Modularization
Factor (MFl) for cluster Cl. MFl can be defined as follows:
12
0, if 0
, if 0il
i j
iMF
i+
== > (1)
where i is the number of intra-edges and j is that of inter-edges for an unweighted problem [6].
For a weighted MDG, i and j are the sum of weights of intra-edges and inter-edges,
respectively.
The MQ can be calculated in terms of MF as
1
k
l
l
MQ MF=
=∑ (2)
The goal of MQ is to limit excessive coupling, but not to eliminate coupling altogether. It
implies that we should not simply pursue high cohesion and neglect proper coupling. Thus,
Page 5
5
MQ attempts to make a trade-off between coupling (Inter-edges) and cohesion (Intra-edges)
through combining them into a single measurement. The aim is to reward increased cohesion
with a higher MQ score and to punish increased coupling with a lower MQ score [11].
3. Multi-agent Evolutionary Algorithm for SMCPs
3.1 Definition of software module clustering agents
Given an MDG with n modules, the arbitrary partition of this MDG can be represented as
character string coding X={x1, x2, ..., xn}, where xi is the cluster identifier of module i, which
can be represented by an integer number. As for the pair of modules i and j in X, if xi=xj,
modules i and j are in the same community; otherwise, they are in different ones. Thus, an
agent for SMCPs can be defined as follows:
Definition 1: An agent is a character string coding X={x1, x2, ..., xn} representing a
candidate partition for an MDG. Its energy is equal to the negative value of the following
objective function,
Energy(X) = - MQ(X) (3)
The purpose of X is to increase its energy as much as possible.
Definition 2: All agents live in a latticelike environment, L, which is called an agent lattice.
The size of L is Lsize×Lsize , where Lsize is an integer. Each agent is fixed on a lattice-point and
it can only interact with its neighbors. Suppose that the agent located at (i, j) is represented as
Li,j , i, j=1, 2, …, Lsize , then the neighbors of Li,j, Neighborsi,j are defined as follows:
{ }, , , , ,, , ,i j i j i j i j i jNeighbors L L L L′ ′ ′′ ′′= (4)
where 1 1
1size
i ii
L i
− ≠′ = =,
1 1
1size
j jj
L j
− ≠′ = =,
1
1
size
size
i i Li
i L
+ ≠′′ = =,
1
1
size
size
j j Lj
j L
+ ≠′′ = =.
For example, the agent lattice can be depicted as the one in Fig.1. Each circle stands for an
agent and any two connected agents can interact with each other. Besides, the data in each
circle means its position in the lattice.
Page 6
6
Fig.1. The model of the agent lattice.
3.2 Evolutionary Operators for Agents
According to [12] [13], each agent has some behaviors. In addition to the aforementioned
behaviors of competition and cooperation, each agent can also increase its energy by using its
knowledge. On the basis of such behaviors, we design three evolutionary operators for agents.
The neighborhood competition crossover operator realizes the behavior of competition. The
mutation operator and the self-learning operator realize the behaviors of making use of
knowledge. Suppose that the three operators are performed on the agent located at (i, j), Li,j =
(l1, l2, …, ln ), and Maxi,j=(m1, m2,…, mn) is the agent with maximum energy among the
neighbors of Li,j, namely Maxi,j∈Neighborsi,j and ∀a∈Neighborsi,j, then
Energy(a)≤Energy(Maxi,j).
Neighborhood competition crossover operator: If Li,j satisfies (5), it is a winner; otherwise,
it is a loser.
Energy(Li,j)>Energy(Maxi,j) (5)
If Li,j is a winner, it can still live in the agent lattice. If Li,j is a loser, it must die, and its
lattice-point will be occupied by Maxi,j. The strategy we used to generate the agent to occupy
the lattice-point is the one-way crossover operator, which is introduced in [16]. In this
operator, the operation is conducted on Li,j and Maxi,j, Li,j is chosen as the source chromosome
while Maxi,j is the destination one. A node is first selected at random, and the cluster and
identifier of this node in Li,j is determined. Then, a value is assigned to all nodes belonging to
the same cluster in Maxi,j. In this way, information related to the community structure in A can
be transferred to Maxi,j. An example of the one-way crossover is given in Table 1, where node
Page 7
7
3 is selected. The community label of node 3 is 2, which is also the community label of node
1. Then, the community label of node 1 in Maxi,j is changed to 2.
Table 1 An example for the one-way crossover with node 3 is selected.
V Li,j (source) Maxi,j (destination) Maxi,j (new)
1
2
3(selected)
4
5
2
1
2
3
1
1
3
2
5
3
2
3
2
5
3
*Bold values indicate changed positions
Mutation operator: In this operator, in order to make use of the information of one node
and its neighbors to which it links, a new mutation operator, namely neighbor-based mutation,
is designed, which works as follows: a node is selected randomly from Li,j , and then its
community label is changed to one of its neighbors.
Self-learning operator: According to our experiences, integrating local searches with EAs
can improve the performance for numerical optimization problems. There are several ways to
realize the local searches. Enlightened by MAGA [12], we propose the self-learning operator
which realizes the behavior of using knowledge by using a small scale MAEA regenerated
below. In order to be distinguished from the other parameters in MAEA, all symbols of the
parameters in this operator begin with an ‘s’.
In the self-learning operator, first, a new agent lattice, sL, with sLsize×sLsize agents, is
generated as follows: the best 10% agents in the current population are randomly put into this
lattice, and then other agents are initialized randomly. Second, the neighborhood competition
crossover operator and the mutation operator are iteratively performed on sL. Finally, the
agent with maximum energy found during the above process is returned. Algorithm 1
summarizes this operator in detail.
Algorithm 1: Self-learning operator
Input: sLk represents the agent lattice in the kth generation, and sL
k+1/2 is the mid-lattice between sL
k and
sLk+1
. sBestk is the best agent among sL
0, sL
1,…, sL
k, and sCBest
k is the best agent in sL
k. sPm is the
probability to perform the mutation operator, and sGen is the number of generations.
Output: Li,j.
1. begin
2. Randomly put best 10% agents in the current population to sL0, and then generate other agents in sL
0
randomly; update sBest0, and k←0;
Page 8
8
3. Calculate energy of sL0, energy(sL
0)=MQ(sL
0);
4. Repeat
5. sLk+1/2
←NeighborhoodCompetition(sLk, sPc);
6. sLk+1
←NeighborMutation(sLk+1/2
, spm);
7. If Energy(sCBestk+1
)>Energy(sBestk),
8. sBestk+1
←sCBestk+1
;
9. else
10. sBestk+1
←sBestk, sCBest
k+1←sBest
k;
11. k←k+1
12. Until stop criteria (k>= sGen) are reached,
13. Li,j←sBestk.
14. end
3.3 Implementation of MAEA-SMCPs
In MAEA-SMCPs, the neighborhood competition operator is performed on each agent.
Consequently, the agents with low energy are cleaned out from the agent lattice so that there
is more developing space for the agents with high energy [12]. The mutation operator is
performed on each agent with probability Pm. The self-learning operator is performed on the
best 10% agents in each generation. Generally, the three operators employ different ways to
simulate the behaviors of agents and do performance to the results, respectively. Algorithm 2
summarizes MAEA-SMCPs in detail.
Algorithm 2: MAEA-SMCPs
Input: Lr represents the agent lattice in the rth generation, and L
r+1/2 is the mid-lattice between L
r and L
r+1.
Bestr is the best agent among L
0, L
1, …, L
r , and CBest
r is the best agent in L
r . Pc and Pm are the
probabilities to perform the neighborhood competition crossover operator and the mutation
operator, respectively.
Output: C={C1, C2, ..., Cn}: the partition with the best objective function value found.
1. begin
2. Initialization(L0), update Best
0, and r←0;
3. Calculate energy of L0, energy(L
0)=MQ(L
0);
4. repeat
5. Lr+1/2
←NeighborhoodCompetition(Lr, Pc);
6. Lr+1
←NeighborMutation(Lr+1/2
,pm);
7. Find the best 10% agents in Lr+1
, then perform the self-learning operator on them;
8. If Energy(CBestr+1
)>Energy(Bestr),
9. Bestr+1
←CBestr+1
;
10. else
11. Bestr+1
←Bestr, CBest
r+1←Best
r;
12. r←r+1
Page 9
9
13. until stop criteria are reached
14. C←Bestr;
15. end
3.4 Computational complexity analysis
Here, we give a brief analysis on the computational complexity of MAEA-SMCPs. n and
m are used to denote the number of modules and the number of edges, respectively. To
calculate MQ, the main computational cost lies in calculating the number of inter-edges and
intra-edges. First, all modules are stored using an adjacency list, and the neighbor modules of
each module are stored in order. Then, assume that we have an array C[k], where k is the
number of clusters. Besides, For two connected modules u and v, where u belongs to cluster-i
and v belongs to cluster-j, C[i] plus one if i equals j; otherwise, C[i] plus one and C[j] plus one.
This process should be iterated for m times due to the number of edges of the system is m. In
order to calculate MQ, the array C should be traversed. Thus, the time complexity of
calculating MQ is O(m).
For MAEA-SMCPs, the main computational cost lies in Steps 3-12; the process of
searching for the best partition. The computational complexity of Step 4 is O(Lsize·Lsize·n), and
that of Step 5 is O(Lsize·Lsize·n2), where Lsize is the size of agent lattice L. For the calculation of
energy for each agent in Step 7, the computational complexity of Step 7 is O(Lsize·Lsize·m).
During the self-learning process, the worst case time complexity is
O(sLsize·sLsize·n)+O(sLsize·sLsize·n2)+O(sLsize·sLsize·m). Therefore, the worst case time
complexity for MAEA-SMCPs can be simplified as O(maxgen·Lsize·Lsize·(n2+ m)), where
maxgen is the number of iterations.
4. Experiments
In this section, 17 real-world problems [3], [6] are employed to validate the performance
of MAEA-SMCPs. The descriptions about these problems are given in Table 2. In the
following experiments, the parameters Pc, Pm, Lsize are set to 0.5, 0.05, 8, respectively.
Here, an experiment on a representative software system “mtunis” is first conducted as a
case study, and then the performance of the five algorithms optimizing MQ is compared on
the 17 problems.
Page 10
10
Table 2
Descriptions of Testing Problems.
Name Description #Modules #Links
mtunis
ispell
rcs
bison
grappa
bunch
incl
icecast
gnupg
inn
bitchx
xntp
exim
mod_ss
ncurses
lynx
nmh
Turing operating system for educational purposes.
Spelling and typographical error correction software.
System used to manages multiple revisions of files.
Parser generator for converting grammar description int C.
Genome Rearrangements Analyzer.
Software Clustering tool(Essential java classes only).
Graph drawing tool.
Streaming MP3 audio codec media server.
Complete implementation of the OpenPGP standard.
Unix news group software.
Open source IRC client.
Time synchronization tool.
Message transfer agent for Unix systems.
Apache SSLITLS Interface.
Display and update software for text-only terminals.
Web browser for UNIX and VMS platforms.
Mail client software.
20
24
29
37
86
116
174
60
88
90
97
111
118
135
138
148
198
57
103
163
179
295
365
360
650
601
624
1653
729
1225
1095
682
1745
3262
4.1 Case study
Here, we first use the data “mtunis” (Mini-Tunis) [23], an operating system for education
purposes, as an example to explain the results in detail. Since “mtunis” is written in the Turing
language [22], each module stands for Turing modules and each edge stands for import
relationships between any two modules. Fig.4(a) shows the structure of “mtunis” as depicted
in the design documentation, which consists of 20 modules and 57 edges. Fig.4(b) shows the
obtained partitions by optimizing the basic MQ using MAEA-SMCPs.
In Fig.2(a), 6 different module clusters represent 6 major subsystems: red modules
constitute MAIN, sky blue modules constitute COMPUTER, dark blue and green modules
constitute FILESYSTEM (dark blue for FILE and green for INODE), pink modules constitute
DEVICE and yellow modules constitute GLOBALS.
Fig.2(b) is the automatically obtained partition for “mtunis” by optimizing the basic MQ
using MAEA-SMCPs. From Fig.2(b), we can see that the obtained partition is quite similar to
the partition in the design documentation. The main difference between Fig.2(a) and Fig.2(b)
lies in the confusion of FILE and INODE. For example, the module “Inode”, which belongs
to INODE, is divided falsely into FILE. What causes such misplacement is that the module
Page 11
11
“Inode”, as an interface module, has a high connection with FILE. Similarly, the modules
“System” and “Panic”, which belong to GLOBAL (cluster with the yellow modules), are also
assigned falsely to other subsystems. The comparison between Fig.2(a) and Fig.2(b) shows
that the obtained partitions using MAEA-SMCPs still has space for improvement, although
they are quite similar.
(a) (b)
Fig.2. Two partitions of mtunis. (a) Structure of mtunis as depicted in the design
documentation; (b) obtained partition by optimizing the basic MQ using MAEA-SMCPs.
4.2 Results and discussions
Tables 3-6 report the averaged results of MAEA-SMCPs over 30 independent runs in terms
of MQ, intra-edges and inter-edges. Since GGA, GNE, MCA and ECA obtained good
performance, a comparison between MAEA-SMCPs and these four algorithms are also
conducted in Table 3-6. Among them, Table 4 reports the percentage that the new method
outperforms as per the results obtained.
As can be seen from Table 3 and 4, in terms of averaged MQ, MAEA-SMCPs outperforms
GGA and GNE on 6 out of 7 problems in unweighted problems. In weighted problems,
compared with GGA, besides the results for “inn”, “mod_ssl”, “ncurses”, the mean values of
MQ obtained by MAEA-SMCPs are better than those of GGA. However, MAEA-SMCPs
outperforms GNE in all weighted problems. Also, the standard deviations obtained by
MAEA-SMCPs are smaller than those of GGA and GNE in all problems, which indicates that
MAEA-SMCPs is more stable than GGA and GNE.
Compared with multi-objective problems, MAEA-SMCPs outperforms MCA and ECA in
most of the 17 problems in terms of MQ. Compared with MCA, the mean values of MQ
Page 12
12
obtained by MAEA-SMCPs are better than those of MCA, and the standard deviations
obtained by MAEA-SMCPs are also smaller, which indicates that MAEA-SMCPs is more
stable than MCA. Meanwhile, compared with ECA, besides the results for “rcs”, “grappa”,
and “inn”, the mean values of MQ obtained by MAEA-SMCPs are also better than those of
ECA, and the standard deviations obtained by MAEA-SMCPs are also smaller, which
indicates that MAEA-SMCPs is also more stable than ECA.
Table 3
Comparison among 5 algorithms in terms of the averaged MQ.
Name MAEA-SMCPs GGA GNE MCA ECA
Mean ± STD Mean ± STD Mean ± STD Mean ± STD Mean ± STD
Not
weighted
mtunis
ispell
rcs
bison
grappa
bunch
Incl
2.314 ± 0.000
2.353 ± 0.000
2.228 ± 0.001
2.659 ± 0.001
12.495 ± 0.005
13.559 ± 0.024
13.569 ± 0.016
2.231 ± 0.051
2.338 ± 0.016
2.232 ± 0.029
2.231 ± 0.051
12.454 ± 0.144
12.938 ± 0.140
13.139 ± 0.170
2.289 ± 0.026
2.346 ± 0.014
2.263 ± 0.020
2.289 ± 0.026
10.828 ± 0.097
8.991 ± 0.100
8.143 ± 0.089
2.294 ± 0.013
2.269 ± 0.043
2.145 ± 0.034
2.416 ± 0.038
11.586 ± 0.106
12.145 ± 0.225
11.811 ± 0.351
2.314 ± 0.000
2.339 ± 0.022
2.239 ± 0.022
2.648 ± 0.029
12.578 ± 0.053
13.455 ± 0.088
13.511 ± 0.059
Weighted icecast
gnupg
inn
bitchx
xntp
exim
mod_ssl
ncurses
lynx
nmh
2.711 ± 0.000
7.004 ± 0.003
7.797 ± 0.002
4.307 ± 0.000
8.175 ± 0.004
6.440 ± 0.001
9.767 ± 0.003
11.410 ± 0.000
4.921 ± 0.003
8.973 ± 0.030
2.665 ± 0.042
6.874 ± 0.094
7.911 ± 0.037
4.252 ± 0.043
8.111 ± 0.083
6.251 ± 0.086
9.831 ± 0.072
11.452 ± 0.141
4.521 ± 0.073
8.770 ± 0.094
2.668 ± 0.016
6.072 ± 0.046
6.296 ± 0.057
3.565 ± 0.032
6.029 ± 0.065
4.848 ± 0.078
6.860±0.085
7.439±0.103
3.037 ± 0.031
4.576 ± 0.056
2.401 ± 0.057
6.259 ± 0.072
7.421 ± 0.077
3.572 ± 0.055
6.482 ± 0.110
5.316 ± 0.132
8.832 ± 0.097
10.211 ± 0.145
3.447 ± 0.086
6.671 ± 0.177
2.654 ± 0.039
6.905 ± 0.055
7.876 ± 0.046
4.267 ± 0.027
8.168 ± 0.076
6.361 ± 0.084
9.749 ± 0.071
11.297 ± 0.133
4.694 ± 0.060
8.592 ± 0.148
*Bold values indicate the best values among the five algorithms.
As can be seen from Table 3 and 4, the results of MAEA-SMCPs are similar to those of
ECA, so we try to analyze MAEA-SMCPs and ECA in terms of MQ using t-test in Table 5.
The results show that MAEA-SMCPs significantly outperforms ECA in 12 out of the 17
problems.
As we know, a better software system tends to have higher cohesion and lower coupling.
Cohesion is measured by the number of intra-edges in the modularization (those edges that lie
inside a cluster), while coupling is a measure of the number of inter-edges in the
modularization (the edges that connect two clusters) [11]. So we further compare intra-edges
Page 13
13
and inter-edges between MAEA-SMCPs and two multi-objective algorithms (MCA and ECA)
in Table 6. As can be seen, the results provide strong evidence that MAEA-SMCPs
outperforms MCA for both unweighted and weighted graphs. That is, MAEA-SMCPs
outperforms MCA in all but 5 of the 17 problems studied. The comparison of MAEA-SMCPs
and ECA is somewhat inconclusive for unweighted graphs, with each approach able to
outperform the other in some cases. However, for weighted MDGs, the ECA approach
outperforms the MAEA-SMCPs in all cases but one of the 10 problems.
Table 4
Comparison between MAEA-SMCPs and GNE, MAEA-SMCPs and ECA in terms of the averaged MQ.
Name MAEA-SMCPs GNE ECA Percentage
(MAEA/GNE)
Percentage
(MAEA/ECA) Mean ± STD Mean ± STD Mean ± STD
Not
weighted
mtunis
ispell
rcs
bison
grappa
bunch
Incl
2.314 ± 0.000
2.353 ± 0.000
2.228 ± 0.001
2.659 ± 0.001
12.495 ± 0.005
13.559 ± 0.024
13.569 ± 0.016
2.289 ± 0.026
2.346 ± 0.014
2.263 ± 0.020
2.289 ± 0.026
10.828 ± 0.097
8.991 ± 0.100
8.143 ± 0.089
2.314 ± 0.000
2.339 ± 0.022
2.239 ± 0.022
2.648 ± 0.029
12.578 ± 0.053
13.455 ± 0.088
13.511 ± 0.059
1.118%
0.286%
-1.385%
1.385%
13.336%
32.327%
38.142%
0%
0.589%
-0.437%
0.418%
-0.626%
0.701%
0.491%
Weighted icecast
gnupg
inn
bitchx
xntp
exim
mod_ssl
ncurses
lynx
nmh
2.711 ± 0.000
7.004 ± 0.003
7.797 ± 0.002
4.307 ± 0.000
8.175 ± 0.004
6.440 ± 0.001
9.767 ± 0.003
11.410 ± 0.000
4.921 ± 0.003
8.973 ± 0.030
2.668 ± 0.016
6.072 ± 0.046
6.296 ± 0.057
3.565 ± 0.032
6.029 ± 0.065
4.848 ± 0.078
6.860±0.085
7.439±0.103
3.037 ± 0.031
4.576 ± 0.056
2.654 ± 0.039
6.905 ± 0.055
7.876 ± 0.046
4.267 ± 0.027
8.168 ± 0.076
6.361 ± 0.084
9.749 ± 0.071
11.297 ± 0.133
4.694 ± 0.060
8.592 ± 0.148
1.530%
13.618%
17.433%
16.717%
34.756%
24.904%
27.706%
35.547%
36.496%
48.256%
2.254%
0.103%
-1.132%
0.920%
0.008%
1.267%
0.239%
1.035%
4.283%
4.468%
According to [11], MCA and ECA are two multi-objective approaches, and each contains 5
objectives. In MCA, it chooses the sum of intra-edges of all clusters, the sum of inter-edges of
all clusters, the number of clusters, MQ, the number of isolated clusters as the 5 objectives
used to be optimized. However, ECA uses the difference between the maximum and
minimum number of modules in a cluster to take place of the fifth objective of MCA, the
number of isolated clusters. Compared to MCA, ECA prefers to choose the solutions which
have the less difference between the maximum and minimum number of modules in a cluster,
which accounts for the relatively homogeneous structures of the clustering. However, in
Page 14
14
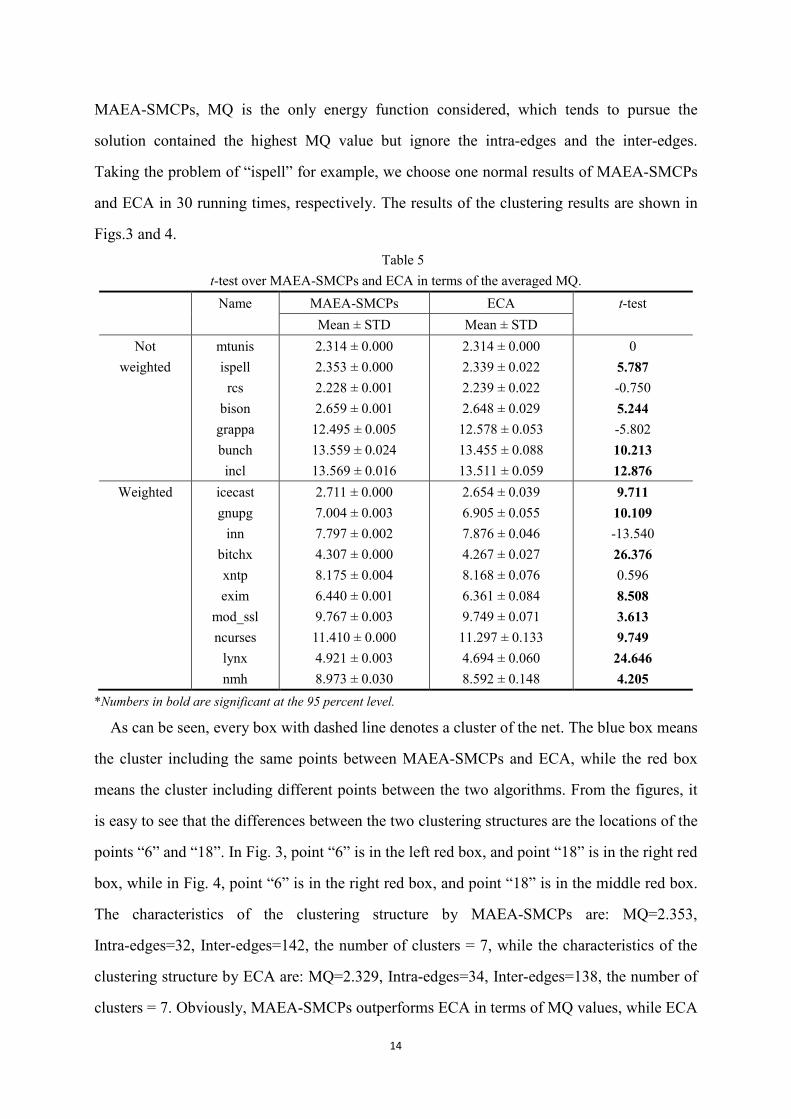
MAEA-SMCPs, MQ is the only energy function considered, which tends to pursue the
solution contained the highest MQ value but ignore the intra-edges and the inter-edges.
Taking the problem of “ispell” for example, we choose one normal results of MAEA-SMCPs
and ECA in 30 running times, respectively. The results of the clustering results are shown in
Figs.3 and 4.
Table 5
t-test over MAEA-SMCPs and ECA in terms of the averaged MQ.
Name MAEA-SMCPs ECA t-test
Mean ± STD Mean ± STD
Not
weighted
mtunis
ispell
rcs
bison
grappa
bunch
incl
2.314 ± 0.000
2.353 ± 0.000
2.228 ± 0.001
2.659 ± 0.001
12.495 ± 0.005
13.559 ± 0.024
13.569 ± 0.016
2.314 ± 0.000
2.339 ± 0.022
2.239 ± 0.022
2.648 ± 0.029
12.578 ± 0.053
13.455 ± 0.088
13.511 ± 0.059
0
5.787
-0.750
5.244
-5.802
10.213
12.876
Weighted icecast
gnupg
inn
bitchx
xntp
exim
mod_ssl
ncurses
lynx
nmh
2.711 ± 0.000
7.004 ± 0.003
7.797 ± 0.002
4.307 ± 0.000
8.175 ± 0.004
6.440 ± 0.001
9.767 ± 0.003
11.410 ± 0.000
4.921 ± 0.003
8.973 ± 0.030
2.654 ± 0.039
6.905 ± 0.055
7.876 ± 0.046
4.267 ± 0.027
8.168 ± 0.076
6.361 ± 0.084
9.749 ± 0.071
11.297 ± 0.133
4.694 ± 0.060
8.592 ± 0.148
9.711
10.109
-13.540
26.376
0.596
8.508
3.613
9.749
24.646
4.205
*Numbers in bold are significant at the 95 percent level.
As can be seen, every box with dashed line denotes a cluster of the net. The blue box means
the cluster including the same points between MAEA-SMCPs and ECA, while the red box
means the cluster including different points between the two algorithms. From the figures, it
is easy to see that the differences between the two clustering structures are the locations of the
points “6” and “18”. In Fig. 3, point “6” is in the left red box, and point “18” is in the right red
box, while in Fig. 4, point “6” is in the right red box, and point “18” is in the middle red box.
The characteristics of the clustering structure by MAEA-SMCPs are: MQ=2.353,
Intra-edges=32, Inter-edges=142, the number of clusters = 7, while the characteristics of the
clustering structure by ECA are: MQ=2.329, Intra-edges=34, Inter-edges=138, the number of
clusters = 7. Obviously, MAEA-SMCPs outperforms ECA in terms of MQ values, while ECA
Page 15
15
beats MAEA-SMCPs in terms of intra-edges and inter-edges, which suggests that the ECA
approach tries to obtain the better MQ value with high intra-edges and low inter-edges, while
MAEA-SMCPs only considers the MQ value which may obtain the low intra-edges and the
high inter-edges. From the results of Table 6 we can see, although MAEA-SMCPs is a
single-objective approach, it outperforms MCA in most of the 17 problems, which indicates
that MAEA-SMCPs has a good capacity in dealing with the isolated clusters, and it has a
better optimizing ability than MCA does. Although MAEA-SMCPs is outperformed by ECA
in terms of intra-edges and inter-edges on some problems, its better MQ values indicates that
MAEA-SMCPs still has a potentiality to improve the optimizing results through the
optimization of the energy function.
Table 6
Comparison between MAEA-SMCPs and MCA, ECA in terms of Intra-edges and Inter-edges.
Name Intra-edges Inter-edges
MAEA-SMCPs MCA ECA MAEA-SMCPs MCA ECA
Mean ± STD Mean ± STD Mean ± STD Mean ± STD Mean ± STD Mean ± STD
mtunis
ispell
rcs
bison
grappa
bunch
Incl
27.000±0.000
32.000±0.000
41.233±0.142
45.200±0.223
99.400±0.300
101.433±0.333
141.667±1.649
24.633±2.092
23.100±3.220
45.133±15.335
40.367±8.231
84.767±11.190
73.567±8.324
91.767±14.024
27.000±0.000
30.033±2.798
47.567±7.859
52.800±6.217
101.167±8.301
111.700±5.305
140.200±3.836
60.000±0.000
142.000±0.000
243.533±0.285
267.600±0.446
391.200±0.600
525.133±0.667
436.667±3.298
64.733±4.185
159.800±6.440
235.733±30.669
277.267±16.463
420.467±22.380
580.867±16.648
536.467±28.048
60.000±0.000
145.933±5.595
230.867±15.719
252.400±12.434
387.667±16.601
504.600±10.611
439.600±7.673
icecast
gnupg
inn
bitchx
xntp
exim
mod_ssl
ncurses
lynx
nmh
1380.000±0.000
1242.133±1.133
1005.600±16.300
7469.000±0.000
1123.433±0.667
2847.167±0.969
2425.833±1.833
713.000±0.000
2885.500±0.025
2327.300±20.500
1609.900±294.921
1104.733±167.834
771.633±162.630
7644.633±2703.349
733.800±109.722
3279.300±563.781
2911.733±310.981
574.433±94.392
2428.567±863.007
2032.267±438.220
1643.167±208.189
1494.167±103.830
1336.900±190.263
7840.600±633.068
1117.967±54.502
3146.567±525.155
3476.800±244.174
806.367±57.515
3730.633±478.016
2704.600±236.782
8096.000±0.000
4916.667±2.267
5708.800±32.600
36290.000±0.000
3681.133±1.333
14759.667±1.938
14110.333±3.667
2794.000±0.000
22237.000±0.050
19331.400±41.000
7636.200±589.843
5192.530±335.669
6176.730±325.260
35938.700±5406.697
4460.400±219.445
12347.400±1127.563
12138.500±621.962
3071.130±188.785
23150.900±1726.014
19921.500±876.440
7569.670±416.378
4413.670±207.660
5046.200±380.526
35546.800±1266.136
3692.070±109.004
12612.900±1050.310
11008.400±488.348
2607.270±115.030
20546.700±956.032
18576.800±473.564
*Bold values indicate the best values among the three algorithms.
Tables 5-6 show that MAEA-SMCPs outperforms ECA on most problems in terms of the
averaged MQ, while ECA outperforms MAEA-SMCPs on most problems in terms of
intra-edges and inter-edges. Thus, we consider the location of solutions produced by
MAEA-SMCPs and ECA in Figs. 5-6, where intra-edges and MQ are chosen to see the
Page 16
16
difference between them.
Fig.3. Clustering structure by MAEA-SMCPs Fig.4. Clustering structure by ECA
In Figs. 5 and 6, intra-edges and MQ are to be maximized, so the optimal solutions are
located in the uppermost and rightmost areas of the intra-edges and MQ space, while the least
optimal are located in the lowermost and leftmost area of the space. From the figures we can
see that each of two concentrates in a different region of the two objective search space. It is
apparent that MAEA-SMCPs focuses on the uppermost and leftmost areas of the space, while
ECA focuses on the lowermost and rightmost areas of the space in most problems. This
suggests that it is hard to say which algorithm is the better. Although the previous results
indicate that MAEA-SMCPs outperforms ECA in terms of MQ and ECA outperforms
MAEA-SMCPs in terms of intra-edges and inter-edges, the visualization of the result
locations in two-dimensional objective space indicates that each of the algorithms could not
produce the absolutely better results than the other one, but the solutions produced by
MAEA-SMCPs are more stable than ECA.
Next, we consider the location of solutions of MAEA-SMCPs and ECA in the intra-edges
and inter-edges space in Fig. 7. Finally, Table 7 reports the number of evaluations of the 3
algorithms (MAEA-SMCPs, MCA and ECA), which shows that the computational cost of
these 3 algorithm are similar.
Page 17
17
24 25 26 27 28 29 301
1.5
2
2.5
3
3.5
Intra-edges
MQ
ECA
MAEA-SMCPs
27 28 29 30 31 32 33 34
2.24
2.26
2.28
2.3
2.32
2.34
2.36
2.38
2.4
2.42
2.44
Intra-edges
MQ
ECA
MAEA-SMCPs
(a) mtunis (b) ispell
30 35 40 45 50 55 60 652.16
2.18
2.2
2.22
2.24
2.26
2.28
2.3
Intra-edges
MQ
ECA
MAEA-SMCPs
35 40 45 50 55
2.62
2.64
2.66
2.68
2.7
2.72
2.74
Intra-edges
MQ
ECA
MAEA-SMCPs
(c) rcs (d) bison
85 90 95 100 105 110 115 12012.3
12.35
12.4
12.45
12.5
12.55
12.6
12.65
12.7
12.75
12.8
Intra-edges
MQ
ECA
MAEA-SMCPs
95 100 105 110 115 120 12513.25
13.3
13.35
13.4
13.45
13.5
13.55
13.6
13.65
13.7
Intra-edges
MQ
ECA
MAEA-SMCPs
(e) grappa (f) bunch
Page 18
18
136 138 140 142 144 146
13.46
13.48
13.5
13.52
13.54
13.56
13.58
13.6
13.62
13.64
Intra-edges
MQ
ECA
MAEA-SMCPs
(g) incl
Fig.5. Solutions in the Intra-edges and MQ space for unweighted MDGs.
1200 1300 1400 1500 1600 1700 1800 1900 2000 2100
2.6
2.65
2.7
2.75
Intra-edges
MQ
ECA
MAEA-SMCPs
1150 1200 1250 1300 1350 1400 1450 1500 1550 1600 16506.75
6.8
6.85
6.9
6.95
7
7.05
7.1
Intra-edges
MQ
ECA
MAEA-SMCPs
(a) icecast (b) gnupg
900 1000 1100 1200 1300 1400 1500 16007.78
7.8
7.82
7.84
7.86
7.88
7.9
7.92
7.94
7.96
7.98
Intra-edges
MQ
ECA
MAEA-SMCPs
6500 7000 7500 8000 8500 90004.24
4.25
4.26
4.27
4.28
4.29
4.3
4.31
4.32
4.33
4.34
Intra-edges
MQ
ECA
MAEA-SMCPs
(c) inn (d) bitchx
Page 19
19
1020 1040 1060 1080 1100 1120 1140 1160 1180 1200
8.12
8.14
8.16
8.18
8.2
8.22
8.24
Intra-edges
MQ
ECA
MAEA-SMCPs
2400 2600 2800 3000 3200 3400 3600 3800 4000
6.1
6.15
6.2
6.25
6.3
6.35
6.4
6.45
6.5
6.55
Intra-edges
MQ
ECA
MAEA-SMCPs
(e) xntp (f) exim
2200 2400 2600 2800 3000 3200 3400 3600 3800 4000
9.64
9.66
9.68
9.7
9.72
9.74
9.76
9.78
9.8
9.82
9.84
Intra-edges
MQ
ECA
MAEA-SMCPs
650 700 750 800 850 90011.15
11.2
11.25
11.3
11.35
11.4
11.45
11.5
11.55
Intra-edges
MQ
ECA
MAEA-SMCPs
(g) mod_ssl (h) ncurses
2800 3000 3200 3400 3600 3800 4000 4200 44004.5
4.55
4.6
4.65
4.7
4.75
4.8
4.85
4.9
4.95
5
Intra-edges
MQ
ECA
MAEA-SMCPs
1800 2000 2200 2400 2600 2800 3000 32008.3
8.4
8.5
8.6
8.7
8.8
8.9
9
9.1
9.2
9.3
Intra-edges
MQ
ECA
MAEA-SMCPs
(i) lynx (j) nmh
Fig.6. Solutions in the Intra-edges and MQ space for weighted MDGs.
Page 20
20
28 29 30 31 32 33 34140
141
142
143
144
145
146
147
148
149
Intra-edges
Inte
r-ed
ges
ECA
MAEA-SMCPs
30 35 40 45 50 55 60200
210
220
230
240
250
260
270
Intra-edges
Inte
r-ed
ges
ECA
MAEA-SMCPs
(a) ispell (b) rcs
36 38 40 42 44 46 48 50 52 54 56245
250
255
260
265
270
275
280
285
290
Intra-edges
Inte
r-e
dg
es
ECA
MAEA-SMCPs
85 90 95 100 105 110 115 120350
360
370
380
390
400
410
420
Intra-edges
Inte
r-ed
ges
ECA
MAEA-SMCPs
(c) bison (d) grappa
Fig.7. Solutions in the Intra-edges and Inter-edges space for unweighted MDGs.
Table 7
Number of Evaluations of MAEA-SMCPs, ECA and MCA.
Name MAEA-SMCPs ECA/MCA
mtunis ispell
rcs bison
grappa bunch incl
icecast gnupg
inn bitchx xntp exim
mod_ssl ncurses
lynx nmh
300000 420000 550000
1180000 7850000
18320000 45580000 6830000
14780000 13550000 17560000 22440000 25450000 28540000 32560000 39890000 65430000
800000 1152000 1682000 2738000 14792000 26912000 60552000 7200000 15488000 16200000 18818000 24642000 27848000 36450000 38088000 43808000 78408000
5. Conclusions
In this paper, we propose a multi-agent evolutionary algorithm to solve SMCPs. The
experiments on practical problems illustrate the good performance of MAEA-SMCPs, and the
Page 21
21
comparison also shows that MAEA-SMCPs outperforms two existing single-objective
algorithms and two existing multi-objective algorithms in terms of MQ. It could be further
studied through the optimization of the energy function, though the results of intra-edges and
inter-edges have great space to improve when compared with one of the multi-objective
algorithms, ECA. Meanwhile, the deviations obtained by MAEA-SMCPs are smaller than
those of existing algorithms, which implies that the performance of MAEA-SMCPs is more
stable. Besides, the number of evaluations of MAEA-SMCPs is less than that of other
algorithms, which further validates the effectiveness of MAEA-SMCPs. In this paper, we
only use MQ as the objective to solve SMCPs. Future research will focus on designing more
effective multi-objective algorithms for SMCPs.
Acknowledgments
This work is partially supported by the EU FP7-PEOPLE-2009-IRSES project under
Nature Inspired Computation and its Applications (NICaiA) (247619), the Outstanding
Young Scholar Program of National Natural Science Foundation of China (NSFC) under
Grant 61522311, the General Program of NSFC under Grant 61271301, the Overseas, Hong
Kong & Macao Scholars Collaborated Research Program of NSFC under Grant 61528205,
the Research Fund for the Doctoral Program of Higher Education of China under Grant
20130203110010, and the Fundamental Research Funds for the Central Universities under
Grant K5051202052.
References
[1] L. L. Constantine and E. Yourdon, Structured Design. Prentice Hall, 1979.
[2] K. Mahdavi, “A clustering genetic algorithm for software modularization with a multiple hill climbing
approach,” Ph.D. dissertation, Brunei University, U.K., 2005.
[3] B. S. Mitchell, “A heuristic search approach to solving the software clustering problem,” Ph.D.
dissertation, Drexel University, USA, 2002.
[4] S. Mancoridis, B. S. Mitchell, C. Rorres, Y. F. Chen, and E. R. Gansner, “Using automatic clustering
to produce high-level system organizations of source code,” Proc. Int’l Workshop Program
Comprehension, pp. 45-53, 1998.
[5] M. Harman, R. Hierons, and M. Proctor, “A new representation and crossover operator for
search-based optimization of software modularization,” Proc. Genetic and Evolutionary Computation
Page 22
22
Conf., pp. 1351-1358, 2002.
[6] K. Mahdavi, M. Harman, and R. M. Hierons, “A multiple hill climbing approach to software module
clustering,” Proceedings of the International Conference on Software Maintenance, pp. 315-324,
2003.
[7] B. S. Mitchell and S. Mancoridis, “Using heuristic search techniques to extract design abstractions
from source code,” Proc. Genetic and Evolutionary Computation Conf., pp. 1375-1382, 2002.
[8] M. Harman, S. Swift, and K. Mahdavi, “An empirical study of the robustness of two module
clustering fitness functions,” Proceedings of the 2005 Conference on Genetic and Evolutionary
Computation, pp. 1029-1036, 2005.
[9] K. Mahdavi, M. Harman, and R. M. Hierons, “Finding building blocks for software clustering,” Proc.
of Genetic and Evolutionary Computation Conference, pp. 2513-2514, 2003.
[10] K. Praditwong, “Solving software module clustering problem by evolutionary algorithm,” Proc. of the
8th International Joint Conference Computer Science and Software Engineering, pp. 154-159, 2011.
[11] K. Praditwong, M. Harman, and X. Yao, “Software module clustering as a multi-objective search
problem,” IEEE Trans. Software Engineering, 37(2), pp. 264-282, 2011.
[12] W. Zhong, J. Liu, M. Xue, and L. Jiao, “A multiagent genetic algorithm for global numerical
optimization”, IEEE Trans. on Systems, Man, and Cybernetics, Part B, 34(2): 1128-1141, 2004.
[13] J. Liu, W. Zhong, and L. Jiao, “A multiagent evolutionary algorithm for constraint satisfaction
problems,” IEEE Trans. on Systems, Man, and Cybernetics, Part B, 36(1), 54-73, 2006.
[14] J. Liu, W. Zhong, and L. Jiao, “A multiagent evolutionary algorithm for combinatorial optimization
problems,” IEEE Trans. on Systems, Man, and Cybernetics Part B, 40(1), 229-240, 2010.
[15] R. S. Pressman, Software Engineering: A Practitioner's Approach, 6th ed., McGraw-Hill Higher
Education, 2005.
[16] M. Tasgin, A. Herdagdelen, and H. Bingol, “Community detection in complex networks using genetic
algorithms,” arXiv: 0711.0491, 2007.
[17] V. R. Basil, and A. J. Turner, “Iterative enhancement: A practical technique for software
development,” IEEE Trans. Software Engineering, vol. SE-1, no. 4, pp. 390-396, 1975.
[18] D. Doval, S. Mancoridis, and B. S. Mitchell, “Automatic clustering of software systems using a
genetic algorithm.” Proceedings of IEEE conference on Software Technology and Engineering
Practice (STEP'99), pp. 73-81, 1999.
[19] A. C. Kumari and K. Srinivas, “Software module clustering using a fast multi-objective
hyper-heuristic evolutionary algorithm,” International Journal of Applied Information Systems, vol. 5,
no. 6, pp. 12-18, 2013.
[20] A. C. Kumari, K. Srinivas, and M. P. Gupta, “Software module clustering using a hyper-heuristic
based multi-objective genetic algorithm,” Advance Computing Conference (IACC), 2013 IEEE 3rd
International, pp. 813-818, 2013.
[21] A. S. Mamaghani, and M. R. Meybodi, “Clustering of software systems using new hybrid algorithms.”
Proceedings of the Ninth IEEE International Conference on Computer and Information Technology
(CIT'09), vol. 1, 2009.
[22] R. C. Holt, and J. R. Cordy. The Turing Programming Language. Communications of the ACM, vol. 31,
no. 12, pp. 1410-1423, 1988.
[23] R. C. Holt. Concurrent Euclid, The UNIX System and Tunis. Addison Wesley, Reading, Massachusetts,
1983.
[24] S. D. Hester, D. L. Parnas, and D. F. Utter, “Using documentation as a software design medium.” Bell
Page 23
23
System Technical Journal, vol. 60, no. 8, pp. 1941-1977, 1981.
[25] K. Praditwong and X. Yao, “A new multi-objective evolutionary optimisation algorithm: the
two-archive algorithm,” Proc. Int’l Conf. Computational Intelligence and Security, Y.-M. Cheung, Y.
Wang, and H. Liu, eds., vol. 1, pp. 286-291, 2006.
[26] S. C. Choi and W. Scacchi, “Extracting and restructuring the design of large systems,” IEEE Software,
vol. 7, no. 1, pp. 66-71, Jan. 1990.
[27] R. Lutz, “Recovering high-level structure of software systems using a minimum description length
principle,” Proc. 13th Irish Conf. Artificial Intelligence and Cognitive Science, Sept. 2002.
[28] D. H. Hutchens and V. R. Basili, “System structure analysis: clustering with data bindings,” IEEE
Trans. Software Engineering, vol. 11, no. 8, pp. 749-757, Aug. 1985.
[29] R. Koschke, “Atomic architectural component recovery for program understanding and evolution,”
PhD thesis, Inst. For Computer Science, Univ. of Stuttgart, 2000.
[30] S. Mancordis, B. S. Mitchell, Y. Chen, and E. R. Gansner, “Bunch: a clustering tool for the recovery
and maintenance of software system Structures”, in Proc. Of Int. Conf. of Software Maintenance, pp.
50-59, 1999.
[31] M. Harman, S. Swift, and K. Mahdavi, “An empirical study of the robustness of two module
clustering fitness functions”, in Proc. Of the 7th annual Conf. on Genetic and Evolutionary
Computation, pp. 1029-1036, 2005.



























![A Robust Evolutionary Algorithm for Training Neural Networks · 2016-05-20 · A Robust Evolutionary Algorithm for Training Neural Networks 215 genetic algorithms [7], evolutionary](https://static.documents.pub/doc/80x56/5f10c1667e708231d44aa981/a-robust-evolutionary-algorithm-for-training-neural-networks-2016-05-20-a-robust.jpg)











