P r o c e e d i n g s o f t h e 4 5 t h I E E E C o n f e r e n c e on D e c i s i o n C o n t r o l WeA17.4M a n c h e s t e r G r a n d H y a t t H o t e lSan D i e g o , C A , U S A , December 1 3 - 1 5 , 2 0 0 6
A New D e s i g n o f 3-DOF F l e x u r e - m e c h a n i s m
P o s i t i o n e r w i t h E l e c t r o m a g n e t i c T e c h n o l o g y
Z h a o - K a i W u ' , M e i - Y u n g Chen 2 , S h a o - K a n g Hung , S h e n g - C h i h Huang , a n d L i - C h e n Fu
1 . D e p a r t m e n t o f E l e c t r i c a l E n g i n e e r i n g , N a t i o n a l T a i w a n U n i v e r s i t y ,
T a i p e i , T a i w a n , R . O . C . ( l i c h e n g c c m s . n t u . e d u . t w )2 . D e p a r t m e n t o f M e ch a t r o n ic T e c h n o l o g y , N a t i o n a l T a i w a n N o r m a l U n i -
v e r s i t y , T a i p e i , T a i w a n , R . O . C . ( c m y @ n t n u . e d u . t w )
A b s t r a c t I n t h i s p a p e r , we p r e s e n t t h e d e s i g n , c o n t r o l a n d
i m p l e m e n t a t i o n o f a n o v e l , c o m p a c t a n d t h r e e d e g r e e - o f -
f r e e d o m ( D O F ) p r e c i s e f l e x u r e - m e c h a n i s m e l e c t r o m a g -
n e t i c - a c t u a t i n g p o s i t i o n i n g s y s t e m w i t h s u b mo c r om e t e r- s c a l e
p r e c i s e p o s i t i o n i n g c a p a b i l i t y a n d m i l l i m e t e r - l e v e l l a r g e t r a v e lr a n g e . The d e s i g n o f t h e p o s i t i o n e r u t i l i z e s t h e m o n o l i t h i c p a r -
a l l e l f l e x u r e m e c h a n i s m w i t h t h e b u i l t - i n e l e c t r o m a g n e t i c a c -
t u a t o r s a n d t h e e d d y - c u r r e n t s e n s o r s t o a c h i e v e t h e 3-DOF
m o t i o n . The p o s i t i o n e r p r e s e n t e d h e r e i n s h o w s t h e p l a n a r
t r a v e l r a n g e o f lmmxlmm w i t h a p o s i t i o n r e s o l u t i o n o f ± 3 0 0
n m . T o l e t t h e c o m p a c t s y s t e m b e more r o b u s t a n d s t a b l e i n
p o s i t i o n i n g , we p r o p o s e a n a da p ti v e s l id in g - mo de c o n t r o l l e r .
W e w i l l d e m o n s t r a t e t h e s a t i s f a c t o r y p e r f o r m a n c e o f t h e p o s i -
t i o n i n g s y s t e m , i n c l u d i n g s t i f f n e s s a n d p r e c i s i o n , w i t h t h e o -
r e t i c a l a n a l y s i s a n d e x p e r i m e n t a l r e s u l t s .
K e y w o r d s :P a r a l l e l f l e x u r e m e c h a n i s m , A d a p t i v e c o n t r o l l e r ,P r e c i s i o n p o s i t i o n i n g , p o s i t i o n e r
1 . I n t r o d u c t i o n
I n t h e p r e c i s i o n p o s i t i o n i n g a r e a , t h e d r y f r i c t i o n i s t h e
m a i n k i l l e r a n d i t i s o n e o f t h e m o s t i m p o r t a n t f a c t o r s l i m -
i t i n g t h e p e r f o r m a n c e i n t h e p r e c i s e p o s i t i o n i n g a p p l i c a t i o n .
T h e r e f o r e , t o p r e v e n t t h e p r o b l e m o f s u c h d r y f r i c t i o n , r e -
g a r d l e s s o f t h e s i z e o f t h e t r a v e l i n g r a n g e , t h e r e a r e f o u r
c o m m o n t y p e s f o r s u c h p r e c i s i o n p o s i t i o n i n g : t h e i n c h -
w o r m - l i k e c l a m p i n g m e c h a n i s m , t h e i n e r t i a l s l i d -
i n g / w a l k i n g , t h e f l e x u r e m e c h a n i s m , a n d t h e l e v i t a t e dm e c h a n i s m . F i r s t , i n t h e i n c h w o r m - l i k e c l a m p i n g m e c h a -
n i s m , n u m e r o u s d e s i g n s o f i n c h w o r m m o t o r s h av e b e e n
s u g g e s t e d i n [ 1 ] . P i e z o e l e c t r i c i n c h w o r m p r e c i s i o n p o s i -t i o n e r s a r e a l s o w i d e l y d i s c u s s e d [ 2 ] . F o r t h e s e c o n d t y p e
m e n t i o n e d a b o v e , t o a c h i e v e o p e r a t i o n i n i n e r t i a l s l i d -
i n g / w a l k i n g , t h e m u l t i - a x i s n a n o p o s i t i o n i n g d e v i c e i s d e -
v e l o p e d [ 3 ] . T h e t h i r d t y p e i s b as ed o n t h e e l a s t i c d e f o r m a -
t i o n o f m a t e r i a l i t s e l f , s o - c a l l e d f l e x u r e h i n g e m e c h a n i s m .
T h e p r e c i s i o n m e c h a n i s m s u s e f l e x u r e s a s r e p l a c e m e n t f o r
c o n v e n t i o n a l h i n g e s , a n d i t p r e v e n t s t h e p r o b l e m s o f f r i c -
t i o n . U s i n g t h e s y m m e t r i c a l g e o m e t r y t o a c h i e v e n a n o m e -
t e r r e s o l u t i o n w i t h X o r Y t r a n s l a t i o n d i r e c t i o n s o r e v e n
Z - a x i s r o t a t i o n i s r e p o r t e d [ 4 ] . T h e f o u r t h t y p e i s u s i n g t h e
s u s p e n s i o n c o n c e p t t o l e v i t a t e t h e m o v i n g p l a t f o r m . Due t o
i t s n o n - c o n t a c t c h a r a c t e r i s t i c s , i t i s a l s o t h e commo n s o l u -
t i o n t o p r e v e n t t h e d r y f r i c t i o n . A i r l e v i t a t e d [ 5 ] a n d m a g -
n e t i c l e v i t a t e d [ 6 ] , [ 7 ] m e c h a n i s m s h a v e b ee n p r o p o s e d .
I n t h e p r e c i s e p o s i t i o n i n g f i e l d , m o s t o f t h e c u r r e n t
h i g h p r e c i s i o n p o s i t i o n i n g d e v i c e s u t i l i z e p i e z o e l e c t r i c m a -
t e r i a l s f o r a c t u a t i o n . T h e c o m m e r c i a l p r o d u c t , m i n i a t u r e
p i e z o n a n o p o s i t i o n e r s a n d s c a n n e r s [ 8 ] , i s p r o d u c e d b yP h y s i k I n s t r u m e n t e . B u t i t s d i s a d v a n t a g e a r e t h e n o n l i n e a re f f e c t s u c h a s h y s t e r e s i s a n d o n l y a t m o s t 1 0 0 m i c r o m e t e r
t r a v e l r a n g e . I t i s g e n e r a l l y a t r a d e - o f f p r o b l e m b e t w e e n
l a r g e t r a v e l r a n g e a n d h i g h r e s o l u t i o n p o s i t i o n i n g . S o f a r , t o
e n l a r g e t h e t r a v e l r a n g e , a n o t h e r a c t u a t i n g w a y , e l e c t r o -
m a g n e t i c a c t u a t i o n , i s a l s o u s e d w i d e l y . T h e p r e c i s e p o s i -
t i o n i n g s y s t e m w i t h e l e c t r o m a g n e t i c a c t u a t i o n h a v e b e e n
d e v e l o p e d . H o w e v e r , s e r v o c o n t r o l may b e s i n g l e - a x i s [ 9 ] ,
t w o - a x i s [ 1 0 ] , [ 1 1 ] o r t h r e e - a x i s [ 1 2 ] , s i x - a x i s [ 1 3 ] , d e -
p e n d i n g o n a p p l i c a t i o n . F o r e x a m p l e , Kim [ 1 0 ] a n d
T r u m p e r c o n s t r u c t e d a h i g h - p r e c i s i o n p l a n a r m a g n e t i cl e v i t a t i o n s t a g e f o r p h o t o l i t h o g r a p h y . Owen a n d M a g g i o r e
[ 1 1 ] c o n s t r u c t e d a p e r m a n e n t m a g n e t l i n e a r s y n c h r o n o u s
m o t o r (PMLSM) b a s e d 2-DOF m a g n e t i c l e v i t a t i o n s y s t e m .
A 3-DOF l a r g e t r a v e l m a g n e t i c s u s p e n s i o n s t a g e ( M S S )
w a s d e v e l o p e d b y C h i a - H s i a n g Menq [ 1 2 ] . A s i x - a x i s u l -
t r a - p r e c i s i o n p o s i t i o n e r w a s p r e s e n t e d b y Kim [ 1 3 ] f o r
4 5 t h I E E E CDC, S a n D i e g o , U S A , D e c . 1 3 - 1 5 , 2 0 0 6
s t e r e o l i t h o g r a p h y a n d 3 - D m i c r o s c a l e r a p i d p r o t o t y p i n g .
A b o v e a l l , we p e r c e i v e t h a t a p r e c i s i o n p o s i t i o n e r w i t h
b e t t e r c o s t - p e r f o r m a n c e c h a r a c t e r i s t i c s a n d l a r g e t r a v e l i n g
r a n g e w i l l b e n e e d e d t o i m p r o v e t h e c o m m e r c i a l f e a s i b i l i t y
o f t h e e m e r g i n g t e c h n o l o g i e s . S o , a l o w - c o s t , c o m p a c t a n d
l a r g e t r a v e l i n g - r a n g e p o s i t i o n e r i s t h e a i m i n g t a r g e t i n t h i sw o r k . B e c a u s e we h a v e m u c h e x p e r i e n c e a b o u t t h e c h a r a c -t e r i s t i c s o f t h e e l e c t r o m a g n e t i c a c t u a t o r , a n d i t i s v e r y s u i t -
a b l e t o a c h i e v e t h e l a r g e r a n g e t r a v e l i n g , we h e r e b y s e l e c t
t h e e l e c t r o m a g n e t i c a c t u a t o r i n o u r w o r k . T h e r e f o r e , t h i s
p a p e r i s c o n c e r n e d w i t h t h e i n t e g r a t i o n o f t h e p a r a l l e l f l e x -
u r e m e c h a n i s m a n d t h e e l e c t r o m a g n e t i c a c t u a t o r s t o g e t h e rw i t h c o m m e r c i a l e d d y - c u r r e n t s e n s o r s s e r v e d a s f e e d b a c k
s e n s o r s t o a c h i e v e a h i g h p r e c i s i o n a n d l o w - c o s t p o s i t i o n e r .
M o r e o v e r , we a l s o d e s i g n a n a d a p t i v e s l i d i n g m o d e c o n -
t r o l l e r t o e n h a n c e t h e r o b u s t n e s s a n d p o s i t i o n i n g a c c u r a c y .
2 . M e c h a n i c a l D e s i g n
T h e p o s i t i o n e r , s e e n b y t h e e x p l o d e d v i e w i n F i g . 2 . 1 ,
i n c l u d e s t h e s t a t o r , t h e X Y - f l e x u r e s t a g e , a n d f o u r s e t s o f
e l e c t r o m a g n e t i c a c t u a t o r s . T h e m o v i n g - p a r t a s s e m b l y c o n -
s i s t s o f a s i n g l e - p i e c e a l u m i n u m p l a t e n p o c k e t - m i l l e dt o r e d u c e t h e m a s s w h i l e m a i n t a i n i n g t h e s t r u c t u r a l s t i f f n e s s .
I n t h e X Y - f l e x u r e s t a g e , a d d i n g t h e p a s s i v e d a m p e r t o t h e
s y s t e m i s t o m i n i m i z e t h e v i b r a t i o n a n d i m p r o v e t h e s t a b i l -
i t y . T h e m a g n e t s o f t h e a c t u a t o r s a r e m o u n t e d o n t h e m o v -
i n g p a r t o f t h e X Y - f l e x u r e , a n d t h e c o i l s a r e m o u n t e d o n t h e
s t a t o r . By t h i s wa y o f a l l o c a t i o n , we c a n m a k e t h e m o v i n gp a r t w i r e l e s s , a n d p r e v e n t t h e f r i c t i o n g e n e r a t e d w h e n i t
m o v e s . And we u s e e d d y c u r r e n t s e n s o r s t o m o u n t o n t h e
X Y - f l e x u r e t o f e e d b a c k t h e c u r r e n t p o s t u r e i n f o r m a t i o n .
M o v i n g p a r t
V X Y : f 1 e x u r _
S t a t o r , i ~
F i g . 2 . 1 : E x p l o d e d v i e w o f t h e p o s i t i o n e r
F i g . 2 . 2 : E l e c t r o m a g n e t i c a c t u a t o r s a l l o c a t i o n
T h e p a r a l l e l k i n e m a t i c a l XY f l e x u r e m e c h a n i s m s i s
m o n o l i t h i c a n d o n l y o n o n e l a y e r . N o t o n l y d o e s t h i s s i g -
n i f i c a n t l y r e d u c e i n e r t i a , b u t a l s o i t y i e l d s i d e n t i c a l r e s o -
n a n t f r e q u e n c i e s a n d d y n a m i c b e h a v i o r i n b o t h X a n d Y
d i r e c t i o n s . And i t i s a c o m p a c t m e c h a n i s m .
T h e a c t u a t i n g p r i n c i p l e i s s i m i l a r a s v o i c e c o i l m o t o r
(VCM) p r i n c i p l e . T h e r e f o r e , u s i n g o n e s e t o f t h e e l e c t r o -
m a g n e t i c a c t u a t o r s c a n g e n e r a t e s i n g l e D O F l i n e a r m o t i o n
u n d e r a t h r u s t f o r c e w h o s e m a g n i t u d e i s t w i c e a s m u c h a s
t h a t o b t a i n e d b y a s e t - u p w i t h o n e m a g n e t a n d a c o i l . H e r e ,
i n s t a l l i n g f o u r s e t s o f t h i s k i n d o f a c t u a t o r a n d a r r a n g i n g
t h e s e a s s h o w n i n F i g . 2 . 2 , we c a n a c h i e v e m o t i o n b o t h i n
X - a x i s a n d Y - a x i s d i r e c t i o n .
3 . Dynamic M o d e l i n g F o r m u l a t i o n
A . M a gn e t i c F o r c e A n a l y s i s
From F i g . 3 . 1 , we c a n o n e t u r n c o i l i n t o f o u r p a r t s , C l ,
C 2 , C 3 , a n d C 4 , a n d d e f i n e B 1 , B 2 , B 3 , a n d B 4 , a s t h e m a g -n e t i c f l u x d e n s i t y t h r o u g h e a c h c o n d u c t i n g w i r e . T h e m a g -
n e t s a r e a r r a n g e d i n t h i s w a y , o n l y n e a r t h e t w o c o n d u c t i n g
w i r e s , C l a n d C 3 , i s t h e r e m a g n e t i c f i e l d a c t i n g o n t h em . S o ,
B 2 a n d B 4 c a n b e a s s u m e d a s z e r o . A c c o r d i n g t o L o r e n t z
F o r c e P r i n c i p l e ,
dF=IdlxB, ( 3 . 1 )
I f t h e c o i l h a s N t u r n s , t h e f o r c e c a n b e w r i t t e n a s :
f a c t = 2 N L B i - K 1 i ,z
current i L L 3
W IX ,
X/ X X * * * /
f L d , .B I g C 2 I . y
F i g . 3 . 1 : A n a l y s i s o f t h e m a g n e t i c f o r c e
( 3 . 2 )
6 0 4
WeA17.4
8/13/2019 A New Design of 3-DOF Flexure-Mechanism Positioner With Electromagnetic Technology
4 5 t h I E E E CDC, S a n D i e g o , U S A , D e c . 1 3 - 1 5 , 2 0 0 6
w h e r e f a c t m e a n s t h e a c t u a t e d f o r c e , L m e a n s t h e e d g e
l e n g t h o f t h e c o i l , a n d K I i s d e f i n e d a s t h e f o r c e c o n s t a n t .
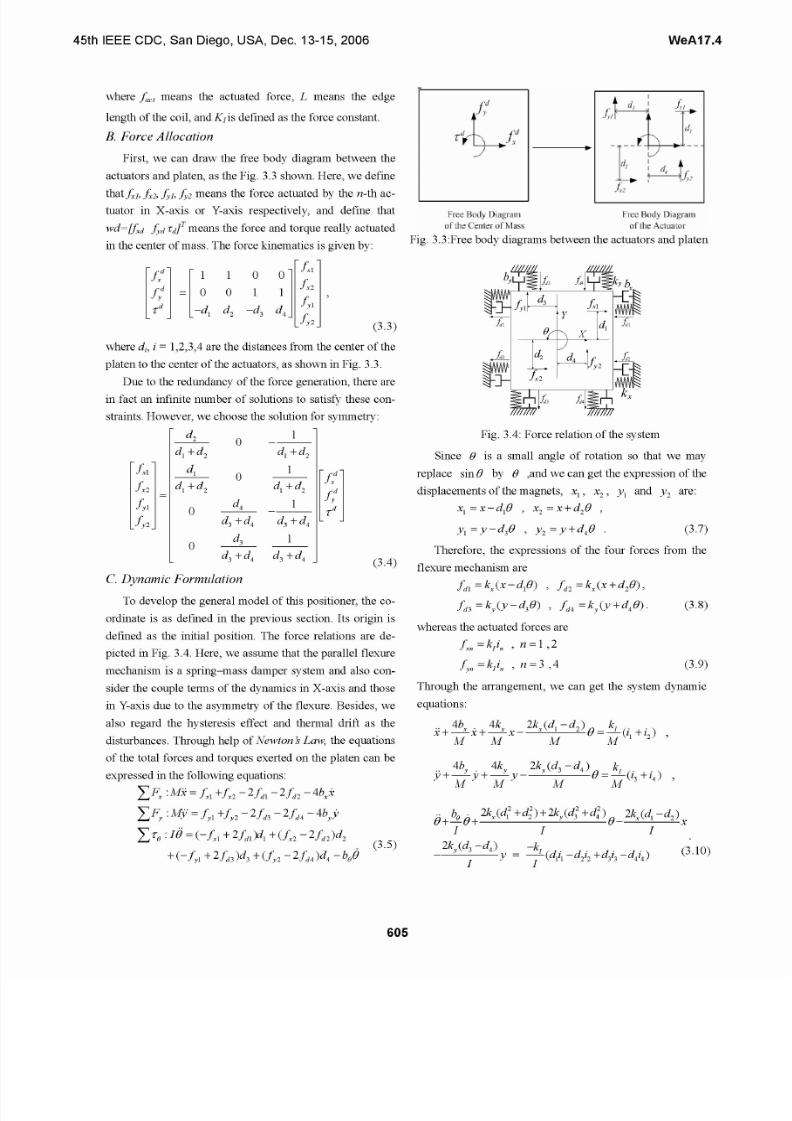
B . F o r c e A l l o c a t i o n
F i r s t , we c a n d r a w t h e f r e e b o d y d ia gr am b e tw e e n t h e
a c t u a t o r s a n d p l a t e n , a s t h e F i g . 3 . 3 s h o w n . H e r e , we d e f i n e
t h a t f i , f x 2 , f y ] f y 2 m e a n s t h e f o r c e a c t u a t e d b y t h e n - t h a c -t u a t o r i n X - a x i s o r Y - a x i s r e s p e c t i v e l y , a n d d e f i n e t h a t
w d = / f x d f y d T d ] T m e a n s t h e f o r c e a n d t o r q u e r e a l l y a c t u a t e di n t h e c e n t e r o f m a s s . T h e f o r c e k i n e m a t i c s i s g i v e n b y :
' d d , d . 1 , lf, 2
f y 2 3 . 3 )
w h e r e d i , i 1 , 2 , 3 , 4 a r e t h e d i s t a n c e s f r o m t h e c e n t e r o f t h e
p l a t e n t o t h e c e n t e r o f t h e a c t u a t o r s , a s s h o w n i n F i g . 3 . 3 .
Due t o t h e r e d u n d a n c y o f t h e f o r c e g e n e r a t i o n , t h e r e a r ei n f a c t a n i n f i n i t e n u m b e r o f s o l u t i o n s t o s a t i s f y t h e s e c o n -
s t r a i n t s . H o w e v e r , we c h o o s e t h e s o l u t i o n f o r s y m m e t r y :
f~~~fFr Digram F r e B o d D i a g r m
o f h t h e C e n t e r o f M a s s o f t h e A c t u a t o r
F i g . 3 . 3 : F r e e b o d y d i a g r a m s b e t w e e n t h e a c t u a t o r s a n d p l a t e n
f x lF f x 2 _
f y 2
d 2d 1 + d 2
d ,d , + d 2
0d 3
d 3
d , + d 2
0 1
d , + d 2
d 4 _ I 1+ d 4 d 3 + d 4
d 3 1
+ d 4 d 3 + d 4
C . D y n a m i c F o r m u l a t i o n
T o d e v e l o p t h e g e n e r a l m o d e l o f t h i s p o s i t i o n e r , t h e c o -
o r d i n a t e i s a s d e f i n e d i n t h e p r e v i o u s s e c t i o n . I t s o r i g i n i s
d e f i n e d a s t h e i n i t i a l p o s i t i o n . T h e f o r c e r e l a t i o n s a r e d e -
p i c t e d i n F i g . 3 . 4 . H e r e , we a s s u m e t h a t t h e p a r a l l e l f l e x u r e
m e c h a n i s m i s a s p r i n g - m a s s d a m p e r s y s t e m a n d a l s o c o n -
s i d e r t h e c o u p l e t e r m s o f t h e d y n a m i c s i n X - a x i s a n d t h o s e
i n Y - a x i s d u e t o t h e a s y m m e t r y o f t h e f l e x u r e . B e s i d e s , we
a l s o r e g a r d t h e h y s t e r e s i s e f f e c t a n d t h e r m a l d r i f t a s t h e
d i s t u r b a n c e s . T h r o u g h h e l p o f N e w t o n k L a w , t h e e q u a t i o n s
o f t h e t o t a l f o r c e s a n d t o r q u e s e x e r t e d o n t h e p l a t e n c a n b e
e x p r e s s e d i n t h e f o l l o w i n g e q u a t i o n s :
Z F > J v M X = f x f , + f 2 - 2 f d l - 2 f d 2 - 4 b , x~§:J/=fl+fY-2fd3 - 2 f d 4 - 4 b YEF ; = f y l + f y 2 -2d- d 4 - 4 y j
Y - : I S = - f 1 j + 2 f d l ) d l + ( f x 2 - 2 f d 2 ) d 2 ( 3 5 )
+ - f y l + 2 f d 3 ) d 3 + f y 2 - 2 f d 4 ) d 4 - b 6 ( .
r j d -
f d .T d
F i g . 3 . 4 : F o r c e r e l a t i o n o f t h e s y s t e m
S i n c e 0 i s a s m a l l a n g l e o f r o t a t i o n s o t h a t we may
r e p l a c e s i n 0 b y 0 , a n d we c a n g e t t h e e x p r e s s i o n o f t h e
d i s p l a c e m e n t s o f t h e m a g n e t s , x 1 , x 2 , Y 1 a n d Y 2 a r e :
x I = x - d 0 I X 2 =x+d20,
y 1 = y - d 3 0 y 2 = y + d 4 0 ( 3 . 7 )
T h e r e f o r e , t h e e x p r e s s i o n s o f t h e f o u r f o r c e s f r o m t h e
f l e x u r e m e c h a n i s m a r ef d l = k x ( x- d l o ) , f d 2 = k X ( X + d 2 O ) ,f d 3 = k y ( y -d 3 0 ) , f d 4 = k y ( y + d 4 ) . ( 3 . 8 )
w h e r e a s t h e a c t u a t e d f o r c e s a r e
f = k i , i , n= 1 , 2
f n = k I i n n n= 3 , 4 ( 3 . 9 )
T h r o u g h t h e a r r a n g e m e n t , we c a n g e t t h e s y s t e m d y n a m i c
e q u a t i o n s :
4 b . 4kx 2 k X ( d l- d 2 ) =k )
M M M M
4 b - Y 4 kp 2 k y ( d 3 -d 4 ) O = k 1 3 + i
1
. + b . k x ( d , 2 + d 2 2 ) + 2 k , d 3 2 + d 4 2 ) 0 2 k x d 1 - d 2 )I I I
2 k y ( d 3 - d 4 ) = - k ld( - dJ2 + dJ- d i )
IY
~ I A 3 '( 3 . 1 0 )
6 0 5
WeA17.4
8/13/2019 A New Design of 3-DOF Flexure-Mechanism Positioner With Electromagnetic Technology
4 5 t h I E E E C D C , S a n D i e g o , U S A , D e c . 1 3 - 1 5 , 2 0 0 6
w h e r e M i s t h e m as s o f t h e p l a t e n ; I i s t h e i n e r t i a o f t h ep l a t e n ; k , a n d k y a r e t h e m o d u l u s o f e l a s t i c i t y ; b x , b y a n d b oa r e t h e d a m p i n g c o n s t a n t .
4 . C o n t r o l l e r D e s i g n
A s s u m e t h e d e s i r e d p o s i t i o n c o m m a n d i s d e f i n e d a s X d ,
Y d , a n d O d . T h e n , t h e s y s t e m d y n a m i c s c a n b e t r a n s f o r m e di n t o e r r o r c o o r d i n a t e s u s i n g t h e r e l a t i o n s , x = x - X d ,
= Y - Y Y d a n d =-0 d U s e t h e c o m p a c t n o t a -t i o n s ; E - y a n d Xd - [ x d Yd O d ] T * An d t h e
d i s t r i b u t i o n o f t h e c o n t r o l e f f o r t s i s :
u 1 =ux , U 2 =u x + U O
U 3 = u y , a n d u 4 = u y +u.
R e w r i t e t h e p l a n t m o d e l e q u a t i o n s a s f o l l o w s :
E =AX+BU -Xd ( 4 . 1 )
w h e r e
X [ x x y j 0 U-] U Xu u y
- a x o
A= 0
a 0 o
a x 0
0
0
0
a y o
a o i
2 k ,M
B= 0
- k 1 ( d , -d2)
I
0
a
0
a x 2
a y 2
a O 2
0
2 k IM
- k 1 ( d 3 - d 4I
0 1o KO
a 0 3 j
k I
M
k IM
) k 1 ( d 2 + d 4 )I
- 4 k x - - 4 b x - 2 k x ( d 1- d 2 )A M ¢ X I M M2 M
- 4 k w - 4 b y 2 k y ( d 3 - d 4 )a . y o M a y l = M a y 2 = M
2 k x ( d 1 - d 2 ) - 2 k y ( d 3 - d 4 )0 0 - I 0,6 I
- 2 k , ( d 1 2 - d 2 2 ) - 2 k x ( d 3 2 - d 4 2 )a 0 2 = I a 6 3 = I
From t h e s y s t e m m a t r i x A , i t i s o b v i o u s t h a t i f d , i s
e x a c t l y e q u a l t o d 2 , t h e n x a n d 0 a r e d e c o u p l e d . S i m i l a r l y ,i f d 3 i s e x a c t l y e q u a l t o d 4 , t h e n y a n d O a r e a l s o d e c o u p l e d .
H o w e v e r , t h e a s s e m b l y e r r o r s o f t h e a c t u a t o r a n d
m e c h a n i s m may r e s u l t i n some i n a c c u r a c i e s o f t h e p l a n tm o d e l . T h u s , a d d i n g a d d i t i o n a l d i s t u r b a n c e t e r m s i n t o t h e
p l a n t m o d e l i s n e c e s s a r y . T h e u n c e r t a i n t y t e r m c a n b e d i -
v i d e d i n t o t w o p a r t s , i . e . , o n e i s a c o n s t a n t u n c e r t a i n t y W ,
a n d t h e o t h e r o n e i s a v a r y i n g u n c e r t a i n t y W V . T h e r e f o r e ,E q . ( 4 . 1 ) c a n b e r e w r i t t e n a s :
E =AX+BU-Xd + W C + W , ( 4 . 2 )
W e a s s u m e t h e v a r y i n g u n c e r t a i n t y i s b o u n d e d a n d s a t i s f i e s
w a r W W W4X -
A . A d a p t i v e S l i d i n g - m o d e C o n t r o l l e r D e s i g n
A s s u m e a s l i d i n g s u r f a c e S , w i t h t h e f o l l o w i n g f o r m :
S= L+AE. ( 4 . 3 )
w h e r e A= d i a g [ l 2 2 A ] T i s a d e s i g n e d p o s i t i v e d i -
a g o n a l m a t r i x . T h e g o a l i s t o r e g u l a t e s t a t e e r r o r E t o z e r o ,
w h i c h s i m u l t a n e o u s l y r e g u l a t e s t h e d e r i v a t i v e o f E t o z e r o
a s w e l l . I f t h e s l i d i n g s u r f a c e c o n v e r g e s t o z e r o a t t h e
f i n i t e t i m e , t h e n E a n d E a l s o c o n v e r g e t o z e r o e x p o -
n e n t i a l l y . To r e l a t e t h e s l i d i n g s u r f a c e t o t h e p l a n t m o d e l ,
t h e t i m e d e r i v a t i v e o f t h e s l i d i n g s u r f a c e i s :
S = E+AE . ( 4 . 4 )H e n c e , a d a p t i v e s l i d i n g - m o d e c o n t r o l l e r w h i c h i s c a -
p a b l e o f o n - l i n e e s t i m a t i n g t h e s y s t e m p a r a m e t e r s i s a p -
p l i e d i n t h i s p o s i t i o n i n g s y s t e m . B a s e o n t h e s l i d i n g s u r f a c e
d y n a m i c s , t h e c o n t r o l l a w i s d e s i g n e d a s t h e f o l l o w i n g :
U A S = B - ( - A X + X d AE- W -KS - N s a t ( S ) ) . 4 . 5 )
w h e r e K = d i a g [ k k s ] , V k , > 0 N - d i q g [ f 7 2 ] ' , V q > 0 ;
A , B a n d W , a r e t h e e st i ma t ed v a l ue s o f A B a n d W c ,r e s p e c t i v e l y , a n d s a t ( . ) i s t h e s a t u r a t i o n f u n c t i o n :
F I S >
/ \
s
s a t ( S ) = 2- i f £ > 2 S 2 - £ ,| £ Il - I S <-£
( 4 . 6 )
B . S t a b i l i t y A n a l y s i s
D e f i n e a L y a p u n o v f u n c t i o n c a n d i d a t e V , w h i c h i s a
p o s i t i v e d e f i n i t e f u n c t i o n :
V =I S T S +
I t r ( A T F I - 1 A ) + I t r ( A T F 2 - ' )2 t 2\2 4 . 7 )
+ I t r ( t 4 T F 3 1 1 i )
w h e r e F - I , I 2 - a n d F3 - a r e a l l p o s i t i v e d i a g o n a lm a t r i c e s . F i r s t , t h e t i m e d e r i v a t i v e o f t h e L y a p u n o v c a n d i -
d a t e f u n c t i o n V c a n b e f o un d o u t a s :
V = S T S + t r( A T I A + t r _ B T )AV 4 . O )
t r ( f r E3 Wc )
A s d e s c r i b e d i n E q . ( 4 . 2 ) - ( 4 . 6 ) , E q . ( 4 . 8 ) c a n b e e x p r e s s e da s :
6 0 6
WeA17.4
8/13/2019 A New Design of 3-DOF Flexure-Mechanism Positioner With Electromagnetic Technology
4 5 t h I E E E C D C , S a n D i e g o , U S A , D e c . 1 3 - 1 5 , 2 0 0 6
F i g . 5 . 1 : E x p e r i m e n t a l d e v i c e o f t h e p o s i t i o n e r
1 _TK _T _ _ST , j ,U fV = - S ' K S - S ' ( N s a t ( S ) - f r i ) - S ' ( A X + B U A S + W )+ t r IAr-A + t r ( 2 B)+t W 3 W I
- S K S ( N s a t ( S ) - w ~ ) + t r FIr 1 A - SX ( 4
+ t r F A ( 2 B S U A S ) ] + t r F f 7 f , W - s )
U s i n g t h e c - m o d i f i c a t i o n [ 1 4 ] t o e s t a b l i s h t h e b o u n d e d n e s s
i n t h e p r e s e n c e o f m o d e l i n g e r r o r t e r m W , t o m o d i f y t h e
a d a p t i v e l a w a s r o b u s t a d a p t i v e l a w s i n t h e f o l l o w i n g :
A = A = F 1 S X T - F l , A .B = B = F 2 S U A S - F 2 u 2 B .
W l = W , = F 3 S - F 3 U 3 W . ( 4 . 1 0 )
S u b s t i t u t e a b o v e e q u a t i o n i n t o E q . ( 4 . 9 ) , a n d i f we c h o o s e
t h e h i g h g a i n N i s l a r g e e n o u g h t o c o v e r t h e v a r y i n g u n c e r -t a i n t y W , , t h e n
V S K S S ( N s a t ( S ) W ) t r [ A - A ] t r[B T 2 B ] t r [ W o a j W ]
< _ S T K S L2 a] ( 4 . 1 1 )
23 2
| | |- b l 2 0 3 3 E l W 1 2 _ l 1 22 [ j = 1 b 2 ] u j [ = 1 W
A d d i n g a n d s u b t r a c t i n g t h e t e r m a V f o r some a > 0 , i f we
c h o o s e 0 < a < m i n { 2 K , F l u , , F 2 U 2 F 2 u 2 } , we h a v e
V < - a V+
22
u j 2 J ( 4 . 1 2 )
A c c o r d i n g t o t h e B a r b a l a t ' s lemma, f o r V 2 > v ,
2 E [ a | I a i 2 + o 2 I l b 2 3i1 1 2 j t h e n v 2 < o i m p l i e s t h a t
V e L , a n d t h e r e f o r e S , A , A , B , B , W , W & L _ .
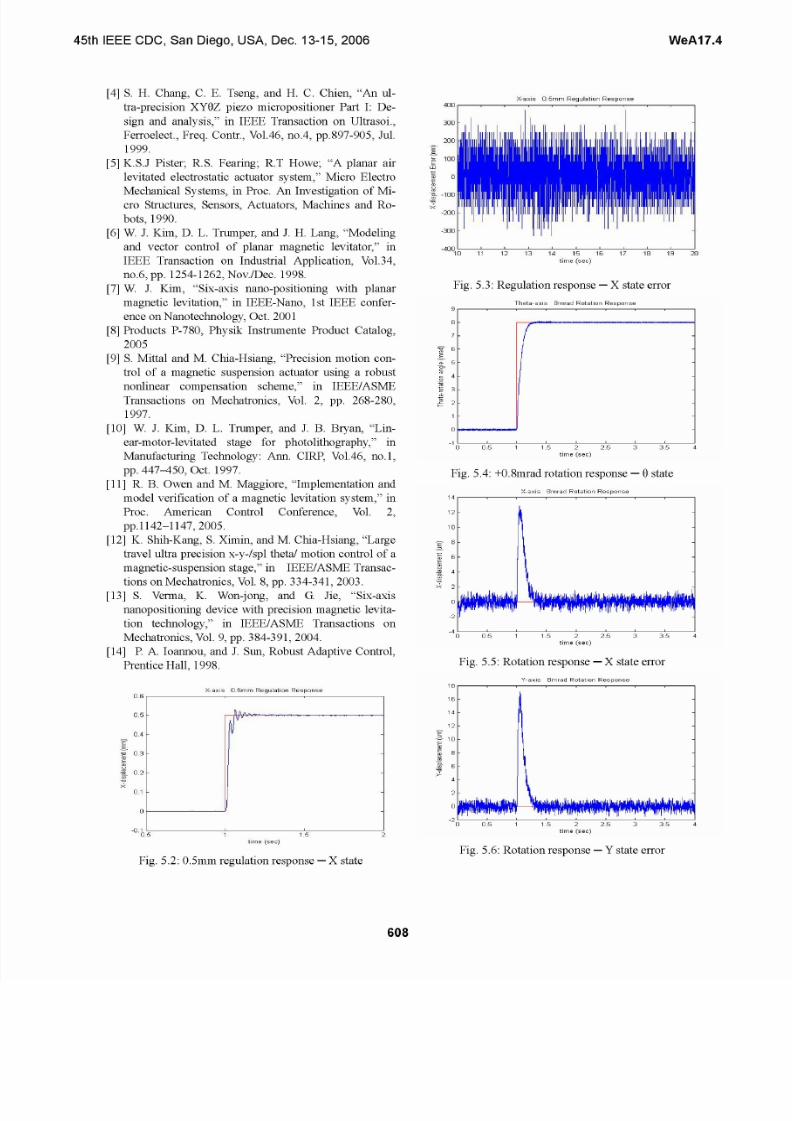
5 . E x p e r i m e n t a l R e s u l t s
T h e w h o l e h a r d wa re o f t h e c o m p a c t p o s i t i o n e r i s
s h o w n i n F i g . 5 . 1 . N o w , we w i l l d e m o n s t r a t e t h e e x p e r i -m e n t a l d a t a t o v a l i d a t e t h e p r o p o s e d a d a p t i v e s l i d i n g - m o d ec o n t r o l l e r . W e u s e t h e e d d y - c u r r e n t s e n s o r s t o f e e d b a c k t h e
p o s i t i o n i n g i n f o r m a t i o n .F i r s t , t o t e s t t h e r e g u l a t i o n c a p a b i l i t y f o r t h e p r o p o s e d
p o s i t i o n e r i n c o r p o r a t i n g t h e a d a p t i v e s l i d i n g - m o d e c o n -
t r o l l e r , we w i l l p r e s e n t t h e r e g u l a t i o n e x p e r i m e n t a l r e s u l t s
t h a t c a n b e a c h i e v e d f r o m - 0 . 5 m m t o +0.5mm a s s h o w n i n
F i g . 5 . 2 - 5 . 3 , a n d t h e s t e a d y s t a t e e r r o r c a n b e a c h i e v e d
+ 3 0 0 n m . T h e r o t a t i o n c a p a b i l i t y o f t h e p o s i t o n e r c a n b e
a c h i e v e d f r o m - 8 m r ad t o + 8 m r a d . T h e e x p e r i m e n t a l d a t a
a r e s h o w n i n F i g . 5 . 4 - 5 . 6 , w h e r e t h e c o n f i g u r a t i o n s t a t e s i n
0 - a x i s c a n c o n v e r g e t o d e s i r e d p o i n t s i n 0 . 3 s e c o n d , a n d t h e
o t h e r t w o s t a t e s X - a x i s a n d Y - a x i s a l s o t a k e 0 . 3 s e c o n d t o
b e c o m e s t a b l e .
6 . C o n c l u s i o n
I n t h i s p a p e r , we i n t e g r a t e d p a r a l l e l X Y - a x i s f l e x u r e
m e c h a n i s m , e l e c t r o m a g n e t i c a c t u a t o r s a n d e d d y - c u r r e n ts e n s o r s i n t o a n o v e l p o s i t i o n e r w i t h 1 mm l a r g e m o v i n g
r a n g e a n d + 3 0 0 n m p o s i t i o n r e s o l u t i o n . T h e d y n a m i c s h a s
b e e n t h o r o u g h l y a n a l y z e d a n d t h e n a c o m p l e t e m o d e l a l s o
h a s b e e n d e r i v e d . An a d a p t i v e s l i d i n g m o d e c o n t r o l l e r h a s
b e e n d e s i g n e d t o r e g u l a t e t h e 3-DOF t o a p r e c i s i o n e x t e n t
o r t o t r a c k a p a r t i c u l a r d e s i r e d m o t i o n . F i n a l l y , t h e g o o d
p e r f o r m a n c e c a n r e v e a l t h a t t h e t h r e e o b j e c t i v e s : l a r g et r a v e l i n g r a n g e , p r e c i s i o n p o s i t i o n i n g , a n d f a s t r e s p o n s e a r e
a c h i e v e d .
7 . A c k n o w l e d g e m e n t
T h i s r e s e a r c h i s s p o n s o r e d b y N a t i on a l S c ie n ce C o u n -c i l , R . O . C . , u n d e r t h e g r a n t N S C - 9 4 - 2 2 1 3 - E - 0 0 3 - 0 1 1 .
8 . B i b l i o g r a p h y[ 1 ] T . G a l a n t e e t a l . , D e s i g n , m o d e l i n g , a n d p e r f o r m a n c e
o f a h i g h f o r c e p i e z o e l e c t r i c i n c h w o r m m o t o r , i n P r o c .S m a r t S t r u c t u r e s a n d I n t e g r a t e d S y s t e m s , V o l . 3 ,p p . 7 5 6 - 7 6 7 , 1 9 9 8 .
[ 2 ] P . E . T e n z e r a n d R . B . M r a d , A S y s t e m a t i c P r o c e d u r ef o r t h e D e s i g n o f P i e z o e l e c t r i c I n c h w o r m P r e c i s i o nP o s i t i o n e r s , i n IEEE/ASME T r a n s a c t i o n o n M e c h a -t r o n i c s , V o l . 9 , n o . 2 , 2 0 0 4 . .
[ 3 ] J . Y . S h i m , a n d D . G . G w e o n , P i e z o - d r i v e n m e t r o l o g i -c a l m u l t i a x i s n a n o p o s i t i o n e r , R e v i e w o f S c i e n t i f i c I n -t r u m e n t s , A m e r i c a n I n s t i t u t e o f P h y s i c s , 2 0 0 1
6 0 7
WeA17.4
8/13/2019 A New Design of 3-DOF Flexure-Mechanism Positioner With Electromagnetic Technology
4 5 t h I E E E C D C , S a n D i e g o , U S A , D e c . 1 3 - 1 5 , 2 0 0 6
[ 4 ] S . H . C h a n g , C . E . T s e n g , a n d H . C . C h i e n , An u l -t r a - p r e c i s i o n XYOZ p i e z o m i c r o p o s i t i o n e r P a r t I : D e -
s i g n a n d a n a l y s i s , i n IEEE T r a n s a c t i o n o n U l t r a s o i . ,F e r r o e l e c t . , F r e q . C o n t r . , V o l . 4 6 , n o . 4 , p p . 8 9 7 - 9 0 5 , J u l .1 9 9 9 .
[ 5 ] K . S . J P i s t e r ; R . S . F e a r i n g ; R . T H o w e ; A p l a n a r a i rl e v i t a t e d e l e c t r o s t a t i c a c t u a t o r s y s t e m , M i c r o E l e c t r oM e c h a n i c a l S y s t e m s , i n P r o c . An I n v e s t i g a t i o n o f M i -c r o S t r u c t u r e s , S e n s o r s , A c t u a t o r s , M a c h i n e s a n d R o -b o t s , 1 9 9
[ 6 ] W . J . K i m , D . L . T r u m p e r , a n d J . H . L a n g , M o d e l i n ga n d v e c t o r c o n t r o l o f p l a n a r m a g n e t i c l e v i t a t o r , i nIEEE T r a n s a c t i o n o n I n d u s t r i a l A p p l i c a t i o n , V o l . 3 4 ,n o . 6 , p p . 1 2 5 4- 1 2 6 2 , N o v . / De c. 1 9 9 8
[ 7 ] W . J . K i m , S i x - a x i s n a n o - p o s i t i o n i n g w i t h p l a n a rm a g n e t i c l e v i t a t i o n , i n I E E E - N a n o , 1 s t IEEE c o n f e r -e n c e o n N a n o t e c h n o l o g y , O c t . 2 0 0 1
[ 8 ] P r o d u c t s P - 7 8 0 , P h y s i k I n s t r u m e n t e P r o d u c t C a t a l o g ,2 0 0 5
[ 9 ] S . M i t t a l a n d M. C h i a - H s i a n g , P r e c i s i o n m o t i o n c o n -
t r o l o f a m a g n e t i c s u s p e n s i o n a c t u a t o r u s i n g a r o b u s tn o n l i n e a r c o m p e n s a t i o n s c h e m e , i n IEEE/ASMET r a n s a c t i o n s o n M e c h a t r o n i c s , V o l . 2 , p p . 2 6 8 - 2 8 0 ,1 9 9 7
[ 1 0 ] W . J . K i m , D . L . T r u m p e r , a n d J . B . B r y a n , L i n -e a r - m o t o r - l e v i t a t e d s t a g e f o r p h o t o l i t h o g r a p h y , i nM a nu f a c t u r i ng T e ch n o l og y : A n n . C I R P , V o l . 4 6 , n o . 1 ,p p . 4 4 7 - 4 5 0 , O c t . 1 9 9 7 .
[ 1 1 ] R . B . Owen a n d M. M a g gi o r e, I m p l em e n t at i o n a n dm o d e l v e r i f i c a t i o n o f a m a g n e t i c l e v i t a t i o n s y s t e m , i nP r o c . A m e r i c a n C o n t r o l C o n f e r e n c e , V o l . 2 ,p p . 1 1 4 2 - 1 1 4 7 , 2 0 0 5 .
[ 1 2 ] K . S h i h - K a n g , S . X i m i n , a n d M. C h i a - H s i a n g , L a r g et r a v e l u l t r a p r e c i s i o n x - y - / s p l t h e t a / m o t i o n c o n t r o l o f a
m a g n e t i c - s u s p e n s i o n s t a g e , i n IEEE/ASME T r a n s a c -t i o n s o n M e c h a t r o n i c s , V o l . 8 , p p . 3 3 4 - 3 4 1 , 2 0 0 3 .
[ 1 3 ] S . V e r m a , K . W o n - j o n g , a n d G . J i e , S i x - a x i sn a n o p o s i t i o n i n g d e v i c e w i t h p r e c i s i o n m a g n e t i c l e v i t a -t i o n t e c h n o l o g y , i n IEEE/ASME T r a n s a c t i o n s o n
M e c h a t r o n i c s , V o l . 9 , p p . 3 8 4 - 3 9 1 , 2 0 0 4 .
[ 1 4 ] P . A . I o a n n o u , a n d J . S u n , R o b u s t A d a p t i v e C o n t r o l ,P r e n t i c e H a l l , 1 9 9 8
Saxis 0 5mm R e g u l a t i o n Response
056
03
0 ~ 2
0 1 1
F i g . 5 . 2 : 0.5mm r e g u l a t i o n r e s p o n s e -X s t a t e
X - a x i s U 6mm P e g u l a t i o n R es p o n s e40 0
3 0 0 1 1 1 1 1
200
1 J 1 1 12 13 1 4 15 1 E i 1 7 18 1 9 20time ( s e c )
F i g . 5 . 3 : R e g u l a t i o n r e s p o n s e -X s t a t e e r r o r
Theta-axis 8 m r a d P o t a t i o n P e s p o n s e
8 _
7
4
2
0
-10 0 . 5 1 1 . 5 2 2 . 5 3 35 4
t i r n e ( s e c )
F i g . 5 . 4 : + 0 . 8 m r a d r o t a t i o n r e s p o n s e - 0 s t a t e
X - a x i s 8 m r a d P o t a t i o n P e sponse14
12
10
4
2
0
-2
0 0 . 5 1 1 . 5 2 2 . 5 3 35 4time ( s e c )
F i g . 5 . 5 : R o t a t i o n r e s p o n s e -X s t a t e e r r o r
Y - a x i s 8m r a d R o t a t i o n Response18
14
12
10
4
2
in mn
- 20 0 . 5 1 1 . 5 2 2 . 5 3 3 . 5 4
time ( s e c )
F i g . 5 . 6 : R o t a t i o n r e s p o n s e -Y s t a t e e r r o r