1 Copyright © 2014 by ASME
A NEW GAS PATH FAULT DIAGNOSTIC METHOD OF GAS TURBINE BASED ON SUPPORT VECTOR MACHINE
Dengji Zhou The key Lab. of power machinery and engineering
of education ministry, Shanghai Jiao Tong University
Shanghai, P.R.China
Jiayun Wang The key Lab. of power machinery and engineering
of education ministry, Shanghai Jiao Tong University
Shanghai, P.R.China
Huisheng Zhang Gas Turbine Research Institute Shanghai Jiao Tong University
Shanghai, P.R.China
Shilie Weng Gas Turbine Research Institute Shanghai Jiao Tong University
Shanghai, P.R.China
ABSTRACT As a crucial section of gas turbine maintenance decision-
making process, to date, gas path fault diagnostic has gained a
lot of attention. However, model-based diagnostic methods, like
non-linear gas path analysis (GPA) and genetic algorithms,
need an accurate gas turbine model, and diagnostic methods
without gas turbine model, like artificial neural networks, need
a large number of experimental data. Both are difficult to gain.
Support vector machine (SVM), a novel computational learning
method with excellent performance, seems to be a good choice
for gas path fault diagnostic of gas turbine without engine
model. In this paper, SVM is employed to diagnose a
deteriorated gas turbine. And the diagnostic result of SVM is
compared to the result of artificial neural networks. The
comparing result confirms that SVM has an obvious advantage
over artificial neural networks method based on a small sample
of data, and can be employed to gas path fault diagnostic of gas
turbine. Additionally, SVM with radial basis kernel function is
the best choice for gas turbine gas path fault diagnostic based
on small sample.
Keywords: gas turbine; gas path fault; diagnostic; support
vector machine; kernel function
NOMENCLATURE R structural risk
Remp empirical risk
RC confidence risk
T training sample / temperature (℃)
xi, yi sample point variables
w, b linear function parameters
αi Lagrange parameters
L Lagrange function
γ kernel parameter
K kernel function
F feature space
PR compressor pressure ratio
qf fuel consumption (kg/s)
PL gas turbine output (MW)
T0 ambient temperature (℃)
T2 compressor outlet temperature (℃)
T4 gas turbine exhaust temperature (℃)
A diagnostic accuracy
nc number of correctly classifying sample
points
ns testing sample size
SVM support vector machine
GPA gas path analysis
INTRODUCTION Gas turbine, with very high power-to-weight ratio,
flexibility for variable working conditions and good emission
performance, is widely used in energy field [1]. Now the
efficiency of combined cycle of gas turbine and steam turbine is
approximately 60%, showing great potential in power
generation. However, the high maintenance cost becomes the
major obstacle of application of gas turbine in energy field [2].
For instance, maintenance cost accounts for about 70% of
Proceedings of the ASME 2014 International Mechanical Engineering Congress and Exposition IMECE2014
November 14-20, 2014, Montreal, Quebec, Canada
IMECE2014-36367
2 Copyright © 2014 by ASME
operating cost of gas turbines for natural gas compressor
station.
Currently, a series of advanced maintenance methods have
been tried to apply for gas turbine maintenance, like condition
based maintenance and reliability-centered maintenance [3].
Diagnostic of gas turbine is one of the key technologies to
support engine these advanced maintenance strategies, with
great potential to reduce maintenance costs, and improve
reliability and availability.
Because of the complexity of gas turbine structure and
working condition, there are a large number of fault modes of
gas turbine. Conclusively, all these fault modes can be divided
into three categories. And each category of faults can be
detected by some special diagnostic techniques.
(1) Gas path fault. This kind of faults always result in the
decrease of engine performance, like output power decrease,
fuel consumption increase, exhaust gas temperature increase,
component efficiency decrease, compressor surge and so on.
They can be detected by gas path analysis (GPA) based on the
monitor of thermal parameters.
(2) Structure strength fault. This kind of faults may cause
very serious consequence, like rupture and damage to the
engine due to insufficient strength, mainly including creep and
fatigue. The diagnostic of this kind of faults needs considering
both vibration parameters and thermal parameters, based on
stress analysis, even some non-destructive testing technology.
(3) Auxiliary system fault. This kind of faults is caused by
the consumable parts damage in auxiliary system for engine,
like inlet air filter block, valve leak and so on. These faults will
reduce the performance of engine [2].
The second kind of faults has gained a lot of attention and
has entered the stage of products, because of the hazardous
consequence. And the third kind of faults is usually prevented
easily by periodical inspection and comparing the monitoring
parameters with their threshold. This paper focuses on the first
kind of fault modes and shows a new diagnostic method for this
kind of faults.
GAS PATH FAULT DIAGNOSTIC OF GAS TURBINE Gas path fault, caused by the degradation of gas path
components, leads to gas turbine performance deterioration.
The most common causes of the degradation are compressor
fouling, blade tip clearance increase due to wearing and
erosion, labyrinth seal damage, foreign and domestic object
damage, hot end component damage, corrosion, etc [4]. These
physical faults result in the thermodynamic performance
changes of gas turbine compressor and turbine, which reflected
from efficiency and flow capacity of compressor and turbine.
Thus, the objective of gas path fault diagnostic is to detect these
faults and determine the extent of them, based on observable
engine parameters such as temperature, pressure, rotational
speed and fuel flow rate [5]. In other word, gas path fault
diagnostic is the inverse process of the real engine working
process, in which degradation of component performance is
calculated based on monitoring parameters and the fault modes
and extent are estimated based on the calculated degradation of
component performance, Fig. 1.
Output
Working condition
Degradation of component performance
Fault modes and extent
Gas turbine
Monitoring parameters
...
Real working process
Diagnostic process
Fig. 1 Gas turbine gas path fault diagnostic theory
Since Urban introduced a linear model based GPA analysis
method in 1967, six kinds of methods have been presented, in
Table 1 [6].
Table 1 Comparison of current gas path fault diagnostic
methods [7]
Diagnostic methods
Earliest
year of
use
Model
based
Model
complexity
Computation
speed
Coping
with
noise
Coping
with
bias
Linear
model-
base method
Linear GPA 1967 Yes Low High No No
Optimal estimates
1980 Yes Fairly low High Yes Yes
Non-
linear
model-based
methods
Non-linear
GPA 1992 Yes Low Fairly high No No
Conventional
optimization 1990 Yes Medium Low Yes Yes
Neural Networks 1965 No Fairly high High Yes Yes
Genetic algorithms 1999 Yes Fairly high Low Yes Yes
Rule-based expert systems Early 1980’s
No High High Yes Yes
Rule-based fuzzy expert
systems 1997 No High Fairly high Yes Yes
Expert system needs the knowledge database from experts,
whose acquisition has been recognized the “bottleneck”
problem; Linear GPA, non-linear GPA and genetic algorithms
methods need accurate gas turbine model which is difficult to
obtain. Neural networks method can diagnose without gas
turbine model, based on historical monitoring parameters and
fault data, seeming to be potential. However, the number of
these data is always small. Thus how to make full use of these
data is a key knowledge.
SVM FOR GAS TURBINE GAS PATH FAULT DIAGNOSTIC
Support Vector Machine (SVM) is a set of related methods
for supervised learning, applicable to both classification and
regression problems [8-10]. Its classification function can be
applied to gas turbine gas path fault diagnostic. Since the
introduction of the SVM classifier decades ago (Cortes and
Vapnik, 1995), SVM gained popularity due to its solid
theoretical foundation [11, 12]. It has been proved a useful tool
which has a good performance to solve nonlinear and small
sample problems, seeming to make full use of limited data.
Following is the basis theory of SVM.
3 Copyright © 2014 by ASME
SVM basic theory
SVM method is based on VC (Vapnik–Chervonenkis)
dimension from the statistical learning theory, a measure of the
capacity of a statistical classification algorithm, and structural
risk minimization principle, to find the best compromise
between the limited sample complexity of the model (i.e. the
accuracy of a particular learning training samples) and learning
ability (i.e. the ability to identify any error in the sample)
according to the information, in order to obtain the best
generalization ability (or generalization).
Statistical study introduces the concept of generalization
error bound, which means the real risk characterization should
be composed of two parts: one is empirical risk, on behalf of
the classifier on a given error in the sample; the other one is
confidence risk, representing the extent of our classifier can be
trusted on the unknown text classification results [11].
Obviously, the second part cannot be accurately calculated, and
can only be given an estimate of the range, so that the accurate
values cannot be calculated. For structural risk:
R ≤ Remp + RC (1)
Formula R is the real risk, Remp is the empirical risk, RC is
the confidence risk. The goal of statistical learning is to seek
the minimization of structural risk, which is the sum of
experience risk and confidence risk
SVM is such a structural risk minimization algorithm. It is
characterized by small sample, nonlinear, high dimensional
pattern recognition.
SVM solving process
It is assumed that there is the training sample
T = *(𝐱𝟏, y1), ⋯ , (𝐱𝐧, yn)+ ∈ (X × Y)n
𝒙𝒊 ∈ 𝑋 = 𝑅𝑛 , 𝑦 ∈ 𝑌 = *1, ⋯ , 𝑀+, 𝑖 = 1, ⋯ , 𝑛 (2)
This sample can be separated by a hyperplane, and the
function of the hyperplane can be assumed as [13]:
((𝐰 ∙ 𝐱) + b) = 0
𝒘 ∈ 𝑅𝑛 , 𝑏 ∈ 𝑅 (3)
The optimal hyperplane is affected by a small number of
sample points (support vectors) close to it, and having nothing
to do with other sample points. Thus the optimal problem
should be [14]
Min*w.b+
1
2‖𝐰‖2
(4)
Subjtect to yi ∙ ((𝐰 ∙ 𝐱𝐢) + b) ≥ 1, i = 1, … , n (5)
Based on the quadratic Programming in optimization
theory, this problem can be transformed to Wolfe dual of the
optimization problem. Introducing Lagrange function:
L(𝐰, b, α) =
1
2‖𝐰‖2 − ∑ αi(yi ∙ ((𝐰 ∙ 𝑥𝑖) + b) − 1)
n
i=1
(6)
Where, Lagrange multipliers αi > 0. Thus,
∂L
∂b= 0 (7)
∂L
∂𝐰= 0
(8)
Thus, the Wolfe dual of the optimization problem for the
multipliers can be arrived:
maxα
∑ αi −1
2∑ αiαjyiyj(𝐱𝐢 ∙ 𝐱𝐣)
n
i,j=1
n
i=1
(9)
Subject to αi ≥ 0, i = 1, … , n, ∑ αiyi = 0
n
i=1
(10)
Then, based on equation (2), the hyperplane decision
function can be presented as:
f(x) = sign (∑ αiyi(𝐱 ∙ 𝐱𝐢) + b
n
i=1
) (11)
where, b =
1
|I|∑ (yi − ∑ αjyj(𝐱𝐢 ∙ 𝐱𝐣)
n
j=1
)
i∈I
,
𝑖 ∈ 𝐼 ≡ *𝑖: 𝛼𝑖 ≠ 0+
(12)
Kernel Trick
The linear classify function is chosen to introduce SVM
theory, (3). Using the kernel trick for SVM makes the
maximum margin hyperplane be fit in a feature space F. The
feature space F is a non-linear map Φ : RN → F from the
original input space, usually of much higher dimensionality
than the original input space. Four most commonly used kernel
function is chosen in this paper, Table 2.
Table 2 Four kernel functions used in this paper
Kernel K(x, xi)
Linear 𝑥𝑇 ∙ 𝑥𝑖 (13)
Polynomial (𝑥𝑇 ∙ 𝑥𝑖) + η)𝑑 (14)
Radial Basis exp(−γ‖x − 𝑥𝑖‖2) (15)
Sigmoidal tanh (γ(𝑥𝑇 ∙ 𝑥𝑖) + η) (16)
Several applications of SVM for diagnostics have been
finished. L.B. Jack and A.K. Nandi diagnosed motor bearings
faults with the help of SVM [15]; B. Samanta used SVM to
detect bearing faults with the SVM optimized by genetic
algorithm [16]; G.Y. Lv employed SVM combined with
dissolved gas analysis to isolate common transfer faults [17];
H.X. Cui used SVM combined with information entropy for
reciprocating compressor diagnosis [18]. However, the
application of SVM for gas turbine gas path fault diagnostic
cannot be found in the published papers.
For gas turbine gas path fault diagnostic, the process and
function of the application of SVM method seems similar to
application of neural networks method. Both employ acquired
sensor data, fault mode and extent information to build a
model, used for determining the fault mode and fault extent
based on sensor data. For diagnostic process, in Fig. 1, the step
of calculating degradation of component performance can be
deleted. Conclusively, the relationship between monitoring
parameters and fault modes and extent can be built directly.
SVM DIAGNOSTIC FOR A SINGLE-SHAFT INDUSTRY GAS TURBINE
A single-shaft industry gas turbine is cited as an instance to
validate the application of SVM for gas turbine gas path fault
4 Copyright © 2014 by ASME
diagnostics. The design point performance of this gas turbine is
as follows, Table 3.
Table 3 Single-shaft industry gas turbine design point
performance parameters [19]
Pressure ratio 17.02
Power output 260 MW
Exhaust gas temperature 635.32 ℃
Fuel consumption 15.06 kg/s
Application of SVM consists of two sub-processes,
training process and testing process, based on training sample
and testing sample, in Fig.2. Both of the two samples consist of
some sets of data, sample points. And each sample point
consists of sensor data and gas turbine fault modes and extent.
These data should be accumulated by operation and
maintenance of real engine. For example, fault modes and
extent should be determined by the borescope inspection in
overhaul, and sensor data should be the data recorded before
the overhaul shutdown. In this paper, a deteriorated gas turbine
simulation model is employed, instead of the real gas turbine.
After acquiring these two samples based on the simulation
model, training sample can be the input to build a SVM
diagnostic model based on SVM methods. Then testing sample
can be used to validate the accuracy of the diagnostic model. In
the testing process, the monitoring parameters of each sample
point should be the input, and the output of SVM diagnostic
model and the real fault modes and extent should be compared.
Then the accuracy of the SVM diagnostic model should be
A =nc
ns
(17)
Where, A is the accuracy of diagnosis; nc is the number of
correctly classifying sample points; ns is testing sample size.
Deteriorated gas turbine simulation model Real gas turbine
Training sample
Testing sample
SVM diagnostic model
SVM diagnostic model accuracy
Sensor data
Fault modes and extent
Training process
Testing process
Fig. 2 Application process of SVM for gas path diagnostic
The number of states of gas turbine may greatly affect the
accuracy of SVM model. Based on operating and maintenance
experience of this type of single-shaft industry gas turbine, 8
fault modes and 8 common health states are taken into
consideration in this paper, in Table 4 and Table 5. For each
health state, the extent of every fault mode is listed in Table 5.
Table 4 Eight main fault modes of gas turbine
Fault Item Fault name
Fault A Compressor blades fouling
Fault B Compressor blade tip clearance increase
Fault C Compressor blades erosion and corrosion
Fault D Compressor foreign object damage
Fault E Turbine nozzles corrosion
Fault F Turbine blades fouling
Fault G Turbine blades erosion
Fault H Turbine foreign object damage
Table 5 Eight health states of gas turbine State
Number A B C D E F G H
1 - - - - - - - -
2 50% - - - - - - -
3 100% - - - - - - -
4 50% - 50% - 50% 50% 50% -
5 100% - 50% - 50% 50% 50% -
6 100% 50% 50% - 50% 50% 50% -
7 - - - 100% - - - -
8 - - - - - - - 100%
For each health state, several sample points can be
acquired based on the deteriorated gas turbine performance
simulation model. In the simulating process, ambient
temperature is set as between 0 and 30 ℃, and gas turbine
output is set as between 80% and 100% of the rated power
output. Thus, each sample point is generated randomly under
the normal working environment and condition for gas turbine.
Each sample point consists of the health state No. and the
monitoring parameters, including ambient temperature, output,
compressor pressure ratio, fuel consumption, compressor outlet
temperature and exhaust gas temperature. Table 6 is an example
of part of the sample points of training sample or testing sample
to show the format of every sample points.
Table 6 Part of sample points of training sample or testing
sample State No. T0 PL PR qf T2 T4
1 27.5 240.5 16.61 14.25 439.70 636.10
1 5.0 234.0 16.62 13.56 386.48 563.44
2 27.5 260.0 16.52 15.32 442.66 695.26
2 5.0 253.5 16.57 14.68 389.64 624.09
3 25.0 253.5 16.06 15.10 435.57 708.92
5 27.5 247.0 15.85 15.45 443.08 747.35
⋯
5 5.0 240.5 15.89 14.80 389.62 673.09
6 5.0 240.5 16.82 14.24 408.05 600.59
6 7.5 240.5 16.80 14.28 414.11 608.01
7 27.5 253.5 17.24 16.18 446.72 736.65
8 22.5 240.5 15.56 15.09 428.01 738.65
5 Copyright © 2014 by ASME
RESULTS AND DISCUSSION Firstly, two sets of training samples are generated by the
deteriorated gas turbine simulation model. Sample size of
Sample set 1 is 400, and sample size of Sample set 2 is 144.
Both of the two sample sets are very small. Then the two
sample sets are adopted for gas turbine gas path fault diagnostic
by five different methods, i.e. SVM with linear kernel function,
SVM with polynomial kernel function, SVM with sigmoidal
kernel function, SVM with radial basis kernel function and
neural networks. Then two testing samples are generated to test
the diagnostic accuracy. The size of both samples is 48. The
result is shown in Table 7. The optimal kernel parameter for
every kernel function is suggested. However, it should be noted
that the best γ value may not be unique because of the small
size of testing sample.
Table 7 Result of SVM gas path diagnostic
Set No. Kernel
function Optimal γ
Accuracy
(%)
Support vector
Number
Sample 1
Linear 0.25 89.58 217
Polynomial 1 93.75 122
Radial Basis 1.2 93.75 199
Sigmoidal 0.1 66.67 230
Sample 2
Linear 0.32 70.83 91
Polynomial 1 64.58 82
Radial Basis 1.2 91.67 88
Sigmoidal 0.1 43.75 95
The effect of training sample size and monitoring
parameters number on diagnostic accuracy is taken into
consideration. And the accuracies of SVM and neural networks
are compared.
Effect of training sample size
Though SVM is suitable for solving small sample problem,
it is obvious that the increase of sample size will increase the
accuracy of SVM diagnostic model. Two training samples with
different sample size are generated to judge the extent of this
effect. The only difference between these two samples is the
number of sets of data. In addition, all of the four common
kernel functions are adopted in the diagnostic process.
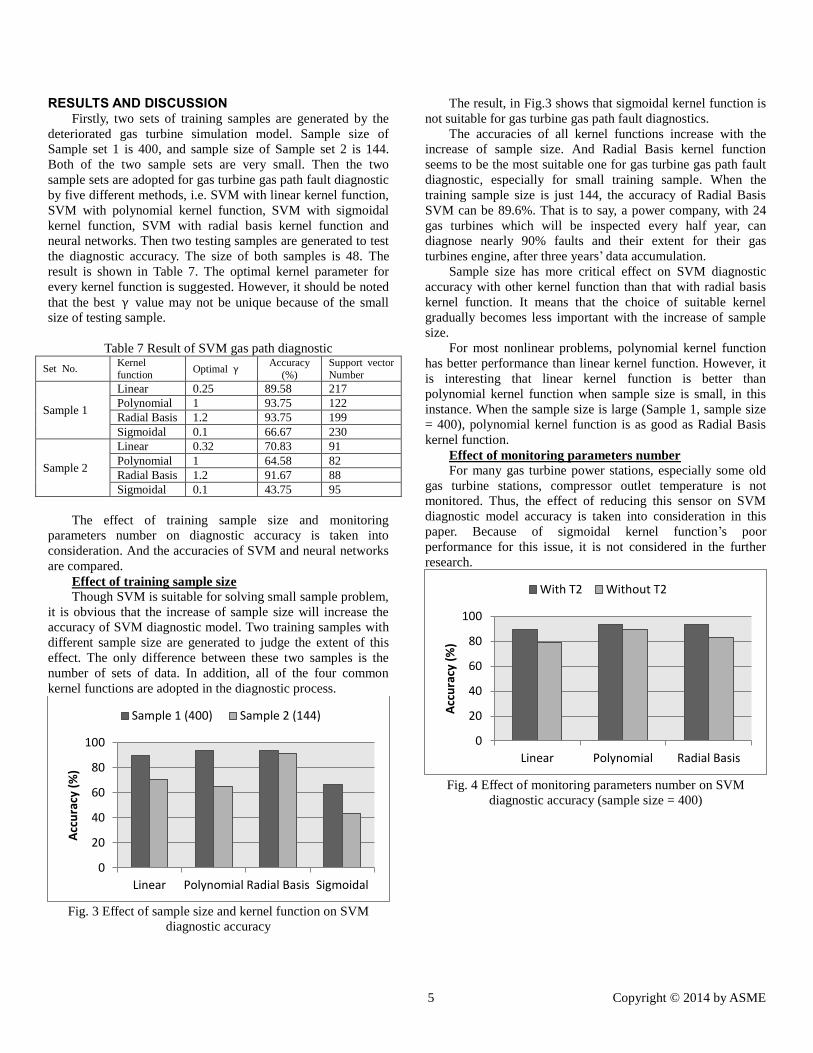
Fig. 3 Effect of sample size and kernel function on SVM
diagnostic accuracy
The result, in Fig.3 shows that sigmoidal kernel function is
not suitable for gas turbine gas path fault diagnostics.
The accuracies of all kernel functions increase with the
increase of sample size. And Radial Basis kernel function
seems to be the most suitable one for gas turbine gas path fault
diagnostic, especially for small training sample. When the
training sample size is just 144, the accuracy of Radial Basis
SVM can be 89.6%. That is to say, a power company, with 24
gas turbines which will be inspected every half year, can
diagnose nearly 90% faults and their extent for their gas
turbines engine, after three years’ data accumulation.
Sample size has more critical effect on SVM diagnostic
accuracy with other kernel function than that with radial basis
kernel function. It means that the choice of suitable kernel
gradually becomes less important with the increase of sample
size.
For most nonlinear problems, polynomial kernel function
has better performance than linear kernel function. However, it
is interesting that linear kernel function is better than
polynomial kernel function when sample size is small, in this
instance. When the sample size is large (Sample 1, sample size
= 400), polynomial kernel function is as good as Radial Basis
kernel function.
Effect of monitoring parameters number
For many gas turbine power stations, especially some old
gas turbine stations, compressor outlet temperature is not
monitored. Thus, the effect of reducing this sensor on SVM
diagnostic model accuracy is taken into consideration in this
paper. Because of sigmoidal kernel function’s poor
performance for this issue, it is not considered in the further
research.
Fig. 4 Effect of monitoring parameters number on SVM
diagnostic accuracy (sample size = 400)
0
20
40
60
80
100
Linear Polynomial Radial Basis Sigmoidal
Acc
ura
cy (
%)
Sample 1 (400) Sample 2 (144)
0
20
40
60
80
100
Linear Polynomial Radial Basis
Acc
ura
cy (
%)
With T2 Without T2
6 Copyright © 2014 by ASME
Fig. 5 Effect of monitoring parameters number on SVM
diagnostic accuracy (sample size = 144)
The result, in Fig. 4 and Fig. 5, shows that the sensor of
compressor outlet air temperature has great effect on diagnostic
accuracy. Thus the application of diagnostic system for old gas
turbines without T2 information may benefit from the
installation of T2 sensor.
For all of the three kinds of kernel function, radial basis
shows the steadiest performance. It can get the accuracy more
than 80% for both samples. Polynomial function can get higher
accuracy than radial basis when sample size is big. However, it
accuracy is the lowest of three when the sample size is small.
Linear function seems to be affected very lightly by the
removal of this sensor when sample size is small. However,
more research should be done to validate this conclusion.
In general, radial basis function is also the suggested kernel
function of gas path fault diagnostic for old gas turbines
without compressor outlet air temperature sensor.
Comparison of SVM and neural networks
The diagnostic accuracies of SVM with three different
kernel functions and neural networks are compared in this
section, based on Sample set 1 (sample size =400) and Sample
set 2 (sample size =144). A 4-1-1 BP neural network is adopted
in this comparison.
Fig. 6 Diagnostic accuracy comparison of SVM and neural
networks
In Fig. 6, the result shows that SVM with radial basis
kernel function is better than neural networks for both sample
sets. When sample size is very small, neural networks has better
performance than SVM without suitable kernel function. It
means that if the suitable kernel function of SVM is unknown,
neural networks may be a better choice than SVM. However,
SVM method with unsuitable kernel function may have better
diagnostic accuracy than neural networks when having a larger
sample size.
Thus, it may be the greatest drawback of SVM that the
suitable kernel function must be known before application. So
much theoretical investigation has to be done before the real
application of SVM.
CONCLUSIONS SVM has been firstly introduced for gas turbine gas path
fault diagnostic in this paper. It seems quite suitable for solving
this problem with very small sample size and without gas
turbine accurate model. Four different kernel functions of SVM
have been employed in this paper, and the optimal kernel
parameters of every kernel function are suggested. The
following conclusions can be drawn:
(1) Radial basis kernel function is the best one to solve gas
turbine gas path diagnostic problem, especially when the
sample size is very small. When sample size is just 144, its
diagnostic accuracy can reach 91.67%.
(2) The sensor of compressor outlet air temperature has
great effect on diagnostic accuracy. Radial basis function is also
the suggested kernel function of gas path fault diagnostic for
old gas turbines without compressor outlet air temperature
sensor.
(3) SVM with Radial Basis kernel function shows better
performance than neural networks for gas turbine gas path fault
diagnostics. However, neural networks method seems to be a
choice for this problem when the suitable kernel function of
SVM function is unknown.
ACKNOWLEDGMENTS This work was supported by Program of Science and
Technology Committee of Shanghai Municipal (09DZ1200702)
and Program of Economy and Information Committee of
Shanghai Municipal.
REFERENCES [1] D. Y. Liu and H. P. Zhang, "Development and electric
power generation technology of the combustion
turbine," Applie energy technology, vol. 1, pp. 5-8,
2008.
[2] D. Xia, "Gas turbine diagnostic theory and experiment
research based on thermal parameters," Shanghai Jiao
Tong University, 2008.
[3] G. Niu, B. S. Yang, and M. Pecht, "Development of an
optimized condition-based maintenance system by
data fusion and reliability-centered maintenance,"
0
20
40
60
80
100
Linear Polynomial Radial Basis
Acc
ura
cy (
%)
With T2 Without T2
0
20
40
60
80
100
Sample 1 Sample 2
Acc
ura
cy (
%)
Linear Polynomial Radial Basis Neural Networks
7 Copyright © 2014 by ASME
Reliability Engineering and System Safety, vol. 95, pp.
786-796, 2010.
[4] A. M. Y. Razak and J. S. Carlyle, "An advanced model
based health monitoring system to reduce gas turbine
ownership cost," American Society of Mechanical
Engineers Turbo Expo 2000-GT-627, 2000.
[5] L. A. Urban, "Parameter selection for multiple fault
diagnostics of gas turbine engines," Journal of
engineering for power, 1972.
[6] L. A. Urban, "Gas turbine engine parameter
interrelationships," HSDUTC, Windsor Locks, Ct., 2nd
edition, 1969.
[7] Y.G.Li, "Performance analysis based gas turbine
diagnostic: A review," Proceedings of the Institution of
Mechanical Engineers, vol. 216, pp. 363-377, 2002.
[8] O. Maimon and L. Rokach, "Data mining and
knowledge discovery handbook second edition,"
Springer pp. 231-248, 2010.
[9] M. Saimurugan, K. I. Ramachandran, V. Sugumaran,
and N. R. Sakthivel, "Multi component fault diagnosis
of rotational mechanical system based on decision tree
and support vector machine," Expert Systems with
applcation, vol. 38, pp. 3819-3826, 2011.
[10] J. Chen and R. J. Patton, "Robust model-based fault
diagnosis for dynamic systems," Massachusetts:
Kluwer Academic Publishers, 1998.
[11] V. Vapnik, "The nature of statistical learning theory,"
Springer Verlag, New York, 1995.
[12] Cortes and Vapnik, "Support-vector network,"
Machine Learning, vol. 20, pp. 273-297, 1995.
[13] F. F. Xie, "Support vector machine for fault diagnosis,"
Hunan University, 2006.
[14] N. Y. Deng and Y. J. Tian, "A new method for data
mining -- support vector machine," Science Press,
Beijing, 2004.
[15] L. B. Jack and A. K. Nandi, "Support vector machines
for detection and characterization of rolling element
bearing faults," Journal of Mechanical Engineering
Science, pp. 1065-1071, 2001.
[16] B. Samanta, K. R. Al-Balushi, and S. A. Al-Araimi,
"Artificial neural networks and support vector
machines with genetic algorithm for bearing fault
detection," Engineering Applications of Artificial
Intelligence, vol. 16, pp. 657-665, 2003.
[17] G. Y. Lv, H. Z. Chen, and H. B. Zhang, "Fault
diagnosis of power transformer based on multi-layer
SVM classifier," Electric Power Systems Research, pp.
9-15, 2005.
[18] H. X. Cui, L. B. Zhang, and R. Y. Kang, "Research on
fault diagnosis for reciprocating compressor valve
using information entropy and SVM method," Journal
of Loss Prevention in the Process Industries, 2009.
[19] Q. Xu, Y. Zhang, and Y. X. Cui, "Technical
characteristics of the Siemens gas turbine V94.3A,"
Shanghai Electric Power, vol. 1, pp. 3-6, 2006.