A Robust, Feature-based Algorithm for Aerial Image Registration Mohamed S. Yasein Department of Electrical and Computer Engineering, University of Victoria Victoria, B.C., Canada, V8W 3P6 Email: [email protected]Pan Agathokl is Department of Electrical and Computer Engineering, University of Victoria Victoria, B.C., Canada, V8W 3P6 Email: [email protected]Abstract — In thi s paper an alg ori thm for aer ial image re g- is trat ion is pr oposed. The obje ct iv e of this al gori thm is to register aerial images having only partial overlap, which are also geometrically distorted due to the different sensing conditions and in addition they may be contaminated with noise, may be blurred, etc. The geometri c disto rtio ns cons ider ed in the reg istr ation pr ocess ar e rotation, tra nsl ati on and scaling. The pr oposed algorithm consists of three main steps: feature point extraction usi ng a fea tur e poi nt extractor bas ed on sca le-interact ion ofMexica n-hat wavelets, obtaining the correspondence between the feature points of the first (reference) and the second image based on Zernike moments of neigh borhoods centered on the feature point s, and esti mati ng the trans for mati on parameters betwe en the first and the second images using an iterative weighted least squares algorithm. Experimental results illustrate the accuracy ofimage registration for images with partial overlap in the presence of additional image distortions, such as noise contamination and image blurring. I. I NTRODUCTION Image registration has found applications in numerous real- life applications such as remote sensing, medical image analy- sis, computer vision and pattern recognition [1]. Given two, or more, images to be registered, image registration estimates the parameters of the geometric transformation model that maps a given image to the reference one. Many image registration techniques have been proposed in the literature. In general, existing image registration techniques can be categorized into two classes. The first class utilizes im- age intensity to estimate the parameters of the transformation between two images using an approach involving all pixels ofthe image, such as [2], [3]. On the other hand, the second class extracts a set of feature points from the image and uses only thes e point s to obtain the paramete rs of the transformation , such as [4], instead of using all pixels. Extensive surveys ofimage registration techniques can be found in [1], [5]. One of the applications of image registration is in remote sensing where several aerial images are being used to obtain cov erage of a re gion. The se ind ividu al ima ges usu all y do not cover the same area and may be sensed under different condit ions. A typ ical sit uation is whe n image s ha ve only parti al over lap and becau se of dif feren t sensi ng condit ions, they appear dist orted. Further, due to env ironmenta l condi- tions, some of them may be noisy or they may not be well focused. The registration of such images has been extensively considered in the literature due to the potential applications. Ear li er tec hni que s use d manual mar ker s or GPS loc ati ons for regi stra tion. Recen tly , tech niques have been deve loped for automatic re gistration of aer ial image s. Some of these techniques rely on image contours, such as [6], [7], [8], others rely on feature points of the image , such as [9], and others rely on lines and feature points of the image, such as [10]. The perfo rmance of such techn iques depends on several factors, such as the area of overlap between images and to what extent it is possible to model the different orientation between images with simple geometric transformations. Further, image quality, affected by distortions such as noise contamination and blur- ring, as well as, image characteristics such as smooth/textured areas or similarity of different areas, play also a role in the techniques’ performance. Fea ture poi nt- bas ed tec hni ques rel y on loc ati ng fea tur e points in both images and using these feature points to obtain the transformation parameters for registering the two images. They tend to give good results, but their performance depends on the accur acy of the featu re poi nt ext rac tor. In order to impro ve the perfo rmanc e, robus t esti mati on tech niques have been used in [9], [10], [11]. In this paper, an algorithm for aerial image registration is propos ed. The main objecti ve of the proposed algorithm is accurately registering aerial images, which are distorted due to different sensing conditions. The images may have partial overlap and are further geometrically distorted. The possible geomet ric dis tor tio ns consid ere d are rot ati on, scalin g and translation. The algorithm proposed here is an extension of the one presented in [12] and can deal with images having partial over lap using an adapt ive weighted least squar es technique. The propos ed algor ithm invol ves three stage s: featu re point extraction, obtaining the correspondence between the feature poi nts of the two ima ges , and tra nsf ormati on par ame ter s estimation. An enhanced efficient feature point extractor that is based on scale-interaction ofMexican-hatwavelets [13], [12] is utilized to extract two sets of feature points from the first and the second images respectively. The correspondence between these two sets of points is evaluated using Zernike moments invariants of circular neighborhoods that are centered on the feature points. Zernike moments have proved to be superior in 1731 1-4244-0755-9/07/$20.0 0 '2007 IEEE
Transcript
8/2/2019 A Robust Feature Based Algorithm for Aerial Image Registration
Abstract— In this paper an algorithm for aerial image reg-istration is proposed. The objective of this algorithm is toregister aerial images having only partial overlap, which are alsogeometrically distorted due to the different sensing conditions andin addition they may be contaminated with noise, may be blurred,etc. The geometric distortions considered in the registrationprocess are rotation, translation and scaling. The proposedalgorithm consists of three main steps: feature point extractionusing a feature point extractor based on scale-interaction of Mexican-hat wavelets, obtaining the correspondence between thefeature points of the first (reference) and the second image basedon Zernike moments of neighborhoods centered on the featurepoints, and estimating the transformation parameters betweenthe first and the second images using an iterative weighted leastsquares algorithm. Experimental results illustrate the accuracy of image registration for images with partial overlap in the presenceof additional image distortions, such as noise contamination andimage blurring.
I. INTRODUCTION
Image registration has found applications in numerous real-
life applications such as remote sensing, medical image analy-sis, computer vision and pattern recognition [1]. Given two, or
more, images to be registered, image registration estimates the
parameters of the geometric transformation model that maps
a given image to the reference one.
Many image registration techniques have been proposed in
the literature. In general, existing image registration techniques
can be categorized into two classes. The first class utilizes im-
age intensity to estimate the parameters of the transformation
between two images using an approach involving all pixels of
the image, such as [2], [3]. On the other hand, the second class
extracts a set of feature points from the image and uses only
these points to obtain the parameters of the transformation,
such as [4], instead of using all pixels. Extensive surveys of image registration techniques can be found in [1], [5].
One of the applications of image registration is in remote
sensing where several aerial images are being used to obtain
coverage of a region. These individual images usually do
not cover the same area and may be sensed under different
conditions. A typical situation is when images have only
partial overlap and because of different sensing conditions,
they appear distorted. Further, due to environmental condi-
tions, some of them may be noisy or they may not be well
focused. The registration of such images has been extensively
considered in the literature due to the potential applications.
Earlier techniques used manual markers or GPS locations
for registration. Recently, techniques have been developed
for automatic registration of aerial images. Some of these
techniques rely on image contours, such as [6], [7], [8], others
rely on feature points of the image , such as [9], and othersrely on lines and feature points of the image, such as [10]. The
performance of such techniques depends on several factors,
such as the area of overlap between images and to what extent
it is possible to model the different orientation between images
with simple geometric transformations. Further, image quality,
affected by distortions such as noise contamination and blur-
ring, as well as, image characteristics such as smooth/textured
areas or similarity of different areas, play also a role in the
techniques’ performance.
Feature point-based techniques rely on locating feature
points in both images and using these feature points to obtain
the transformation parameters for registering the two images.
They tend to give good results, but their performance dependson the accuracy of the feature point extractor. In order to
improve the performance, robust estimation techniques have
been used in [9], [10], [11].
In this paper, an algorithm for aerial image registration is
proposed. The main objective of the proposed algorithm is
accurately registering aerial images, which are distorted due
to different sensing conditions. The images may have partial
overlap and are further geometrically distorted. The possible
geometric distortions considered are rotation, scaling and
translation. The algorithm proposed here is an extension of the
one presented in [12] and can deal with images having partial
overlap using an adaptive weighted least squares technique.
The proposed algorithm involves three stages: feature pointextraction, obtaining the correspondence between the feature
points of the two images, and transformation parameters
estimation. An enhanced efficient feature point extractor that is
based on scale-interaction of Mexican-hat wavelets [13], [12]
is utilized to extract two sets of feature points from the first and
the second images respectively. The correspondence between
these two sets of points is evaluated using Zernike moments
invariants of circular neighborhoods that are centered on the
feature points. Zernike moments have proved to be superior in
17311-4244-0755-9/07/$20.00 '2007 IEEE
8/2/2019 A Robust Feature Based Algorithm for Aerial Image Registration
` is the scale of the function, and are the vertical and horizontal coordinates respectively.
The second stage localizes the feature points of the imageby finding the local maxima of the responseS
. A local
maximum of S is a point with maximum value in a disk-
shaped neighborhood of radius
. An example showing the
process of feature point extraction from an image is illustrated
in Fig. 1.
(a) (b)
(c) (d)
Fig. 1. Feature point extraction process: (a) The feature points superimposedon the input image, (b) Response of applying Mexican hat wavelet with scale
, (c) Response of applying Mexican hat wavelet with scale , (d) Absolutedifference of the two responses and the locations of the obtained local maxima.
B. Correspondence between Points
Applying the feature extraction process on the first and the
second images results in two sets of feature points,
and
$ respectively. The number of the feature points in the first
1732
8/2/2019 A Robust Feature Based Algorithm for Aerial Image Registration
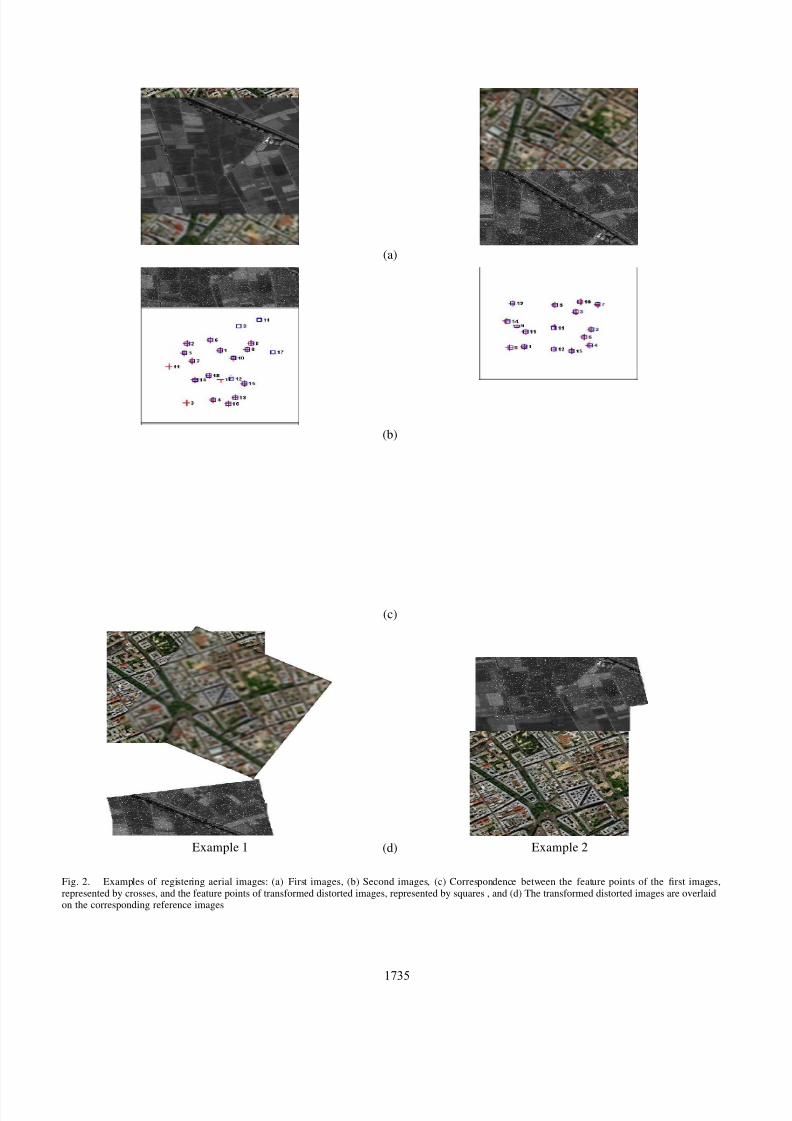
Fig. 2. Examples of registering aerial images: (a) First images, (b) Second images, (c) Correspondence between the feature points of the first images,represented by crosses, and the feature points of transformed distorted images, represented by squares , and (d) The transformed distorted images are overlaidon the corresponding reference images
1735
8/2/2019 A Robust Feature Based Algorithm for Aerial Image Registration
between images, in the presence of additional distortions, such
as image blurring and noise contamination. Results indicate
that the use of the iterative weighted lease squares algorithm
is very effective in eliminating feature points that have false
correspondence and that the proposed algorithm leads to an
accurate estimation of the transformation parameters.
ACKNOWLEDGMENT
This work has been supported by the Natural Sciences and
Engineering Research Council of Canada (NSERC).
REFERENCES
[1] Lisa G. Brown. A survey of image registration techniques. ACM Computing Surveys (CSUR), 24(4): 325–376, 1992.
[2] B. S. Reddy and B. N. Chatterji, “An FFT-Based technique for transla-tion, rotation, and scale-invariant image registration,” IEEE Transactions
on Image Processing, vol. 5, no. 5, 1996.[3] G. Wolberg and S. Zokai. Robust image registration using log-polar
transform. In Proceedings of the IEEE International Conference on Image
Processing (ICIP), Vancouver, BC, Canada, Sept. 2000.[4] Y. Jianchao, “Image registration based on both feature and intensity
matching,” in Proceedings of the IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP), Salt Lake City, UT ,USA, May 2001, pp. 1693–1696.
[5] B. Zitová and J. Flusser, “Image registration methods: a survey,”Proceedings of Image Vision Computing, vol. 21, no. 11, pp. 977-1000,2003.
[6] H. Li, B. S. Manjunath and S. K. Mitra, “A contour-based approach tomultisensor image registration,” IEEE Transactions on Image Processing,vol. 4, no. 3, pp. 320–334–1364, 1995.
[7] X. Dai and S. Khorram, “A feature-based image registration algorithmusing improved chain-code representation combined with invariant mo-ments,” IEEE Transactions on Geoscience and Remote Sensing, vol. 37,no. 5, pp. 2351–2362, 1999.
[8] V. Govindu and C. Shekhar, “Alignment using distributions of localgeometric properties,” IEEE Transactions on Pattern Analysis and Machine
Intelligence, vol. 21, no. 10, pp. 1031–1043, 1999.[9] T. Kim and Y.-J. Im, “Automatic satellite image registration by combi-
nation of matching and random sample consensus,” IEEE Transactions onGeoscience and Remote Sensing, vol. 41, no. 5, pp. 1111–1117, 2003.
[10] C. Rao, Y. Guo, H. Sawhney and R. Kumar, “A heterogeneous feature-based image alignment method,” Proceedings of the 18th InternationalConference on Pattern Recognition (ICPR 2006), Hong Kong, vol. 2, pp.345–350, Aug 2006.
[11] M. A. Fischler and R. C. Bolles, “Random sample consensus: a paradigmfor model fitting with applications to image analysis and automatedcartography,” Graphics and Image Processing, vol. 24, no. 6, pp. 381–395, Jun 1981.
[12] M. S. Yasein and Pan Agathoklis, “Automatic and robust imageregistration using feature points extraction and Zernike moments invariants,” in Proceedings of the Fifth IEEE International Symposium on SignalProcessing and Information Technology, Athens, Greece, Dec. 2005, pp.566–571.
[13] M. Kutter, S. K. Bhattacharjee and T. Ebrahimi, “Toward second gen-eration watermarking schemes,” in Proceedings of the IEEE InternationalConference on Image Processing (ICIP), Kobe, Japan, Oct. 1999, pp. 320–323.
[14] C.-H. Teh and R. T. Chin, “On image analysis by the methodsof moments,” IEEE Transactions on Pattern Analysis and Machine
Intelligence, vol. 10, no. 4, pp. 496–513, 1988.[15] A. Khotanzad and Y. H. Hong, “Invariant image recognition by
Zernike moment,” IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 12, no. 5, pp. 489–497, 1990.
[16] S. X. Liao and M. Pawlak, “On the accuracy of Zernike momentsfor image analysis,” IEEE Transactions on Pattern Analysis and Machine
Intelligence, vol. 20, no. 12, pp. 1358–1364, 1998.[17] F. R. Hampel, E. M. Ronchetti, P. J. Rousseeuw and W. A. Stahel,
“Robust statistics: the approach based on influence functions,” Wiley, 1986.