10
1 A Simple SIS for Research Reactive! Real-time! Embedded! Distributed! Heterogeneous!
1
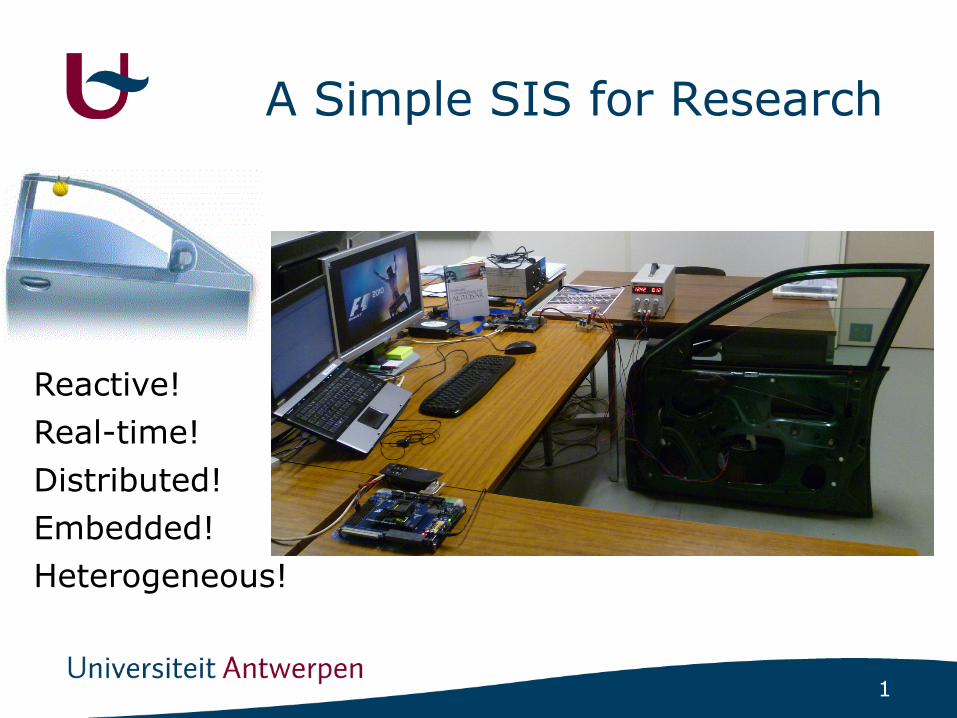
A Simple SIS for Research
Reactive! Real-time!
Embedded! Distributed!
Heterogeneous!

2
Process Modelling for MPM
Levi Lucio, Sadaf Mustafiz, Joachim Denil, Hans Vangheluwe, Maris Jukss, FTG+PM: An Integrated Framework for Investigating Model Transformation Chains. SDL Forum 2013: 182-202
Sadaf Mustafiz, Joachim Denil, Levi Lucio, and Hans Vangheluwe; "The FTG+PM Framework for Multi-Paradigm Modelling: An Automotive Case Study"; Accepted @ MPM2012 of Models2012, 2012
:ModelPlant :ModelControl:ModelEnv:ModelNetwork
:ControllerToSC
:ScToPn:PlantToPN:EnvToPN
:PlantToCbd
:EnvToCbd
AND False
:ScToAUTOSAR
:ToInstrumented
:ArchitectureDeployment
:ECUDeployment
False
True
:DetailedDeployment
False
True
:SwToC
:ArToRte:ArToMw
:CombineC
:RefineNetwork
TRUE:ExtractTiming
Behaviour
:RefineTimingBehaviour
:RefineTimingBehaviour
:RefineTimingBehaviour
True
:Boolean :Boolean
:Control DSL:Plant DSL:Environment DSL
:Network Formalism
:Statecharts
:CBD:Encapsulated PN
:CBD:Encapsulated PN
:Encapsulated PN
:Network Formalism
:AUTOSAR
:Performance Model
:AUTOSAR
:AUTOSAR
:AUTOSAR
:Boolean
:Boolean
:Boolean
:C-Code :C-code
:C-code
:C-Code
:Requirements Diagram
:TIMMO
:TIMMO
:TIMMO
:TIMMO
ModelRequirements
SafetyAnalysis HybridSimulation
CalibrationInfrastructure
EnvToCBD
Environment DSL
Causal Block Diagrams
PlantToCbd
Plant DSL
ControlToSc
Control DSL
StatechartsNetwork
FormalismEncapsulated
Petrinets
Hybrid Formalism
combineCBD
AUTOSAR
ScToAUTOSAR
C-code SwToC
Algebraic Equations
ToSchedulabilityAnalysis
DEVS
ToDeploymentSimulation
Performance Trace
ExecuteCalibration
Performance Formalism
ExtractPerformance
ToInstrumented
Architecture Deployment
ScToPnPlantToPnEnvToPN
combinePN
Reachability Graph
HybridSimula-tion Trace
SimulateHybrid
BuildRG
ToBinPackingAnalysis
RefineNetwork
ModelPlant ModelControlModelEnv
ECUDeployment
DetailedDeployment
ModelNetwork
ArToMwArToRte
CcombineC
SysML Req Diagram
TIMMO
CTL
ModelContext
ExtractRequirements
ToSafetyRequirement
Extract Timing Behaviour
Refine Timing Behaviour
SysML Use Case Diagram
Textual Requirements
ModelTextualReq
Boolean
CheckCtlCheckContinuous
Petrinets
RefineUseCases
RefineRequirements
DEVS Trace
SimulateDEVS
Bin Packing Trace
CheckDEVSTrace
Schedulability Trace
CalculateSchedulability
CheckBinPacking
GenerateCalibration
CombineCalibration
RefineUseCase
Description
ModelUseCaseDescription
SearchECUSearchDetailed
CheckSchedulability
:Use Cases
:Use Case Diagram
:SearchECU
:SearchDetailed
:SearchArchitecture False
SchedulabilityAnalysis
DEVSSimulation
BinPackingAnalysis
SearchArchitectureInteger
:Integer
:Integer
:Integer
:BinPackingTrace
:SchedulabilityTrace
:DEVSTrace
1
2
2
1
3
1
Use Cases

3
Hybrid Simulation
InterfaceBlock::update
Data-In
Data-Update-In
Control-rules
Control?
Model::update
Data-Update-Out
Data-Outno
yes
InterfaceBlock::Data-In
InterfaceBlock::Control-Rules
Data-In::data-InRule
ControlRules::store TriggeredRule
data-InRuledata-InRule2...
ControlRules:: onPeriodicRule
storeTriggeredRuleonPeriodicRule...
OR
AND Condition
Condition Expr
PeriodOffset

4
Process Modelling for MPM
* Levi Lucio, Sadaf Mustafiz, Joachim Denil, Hans Vangheluwe, Maris Jukss, FTG+PM: An Integrated Framework for Investigating Model Transformation Chains. SDL Forum 2013: 182-202 * Sadaf Mustafiz, Joachim Denil, Levi Lucio, and Hans Vangheluwe; "The FTG+PM Framework for Multi-Paradigm Modelling: An Automotive Case Study"; Proceedings of the 6th Workshop on Multi-Paradigm Modelling, 2012
:ModelPlant :ModelControl:ModelEnv:ModelNetwork
:ControllerToSC
:ScToPn:PlantToPN:EnvToPN
:PlantToCbd
:EnvToCbd
AND False
:ScToAUTOSAR
:ToInstrumented
:ArchitectureDeployment
:ECUDeployment
False
True
:DetailedDeployment
False
True
:SwToC
:ArToRte:ArToMw
:CombineC
:RefineNetwork
TRUE:ExtractTiming
Behaviour
:RefineTimingBehaviour
:RefineTimingBehaviour
:RefineTimingBehaviour
True
:Boolean :Boolean
:Control DSL:Plant DSL:Environment DSL
:Network Formalism
:Statecharts
:CBD:Encapsulated PN
:CBD:Encapsulated PN
:Encapsulated PN
:Network Formalism
:AUTOSAR
:Performance Model
:AUTOSAR
:AUTOSAR
:AUTOSAR
:Boolean
:Boolean
:Boolean
:C-Code :C-code
:C-code
:C-Code
:Requirements Diagram
:TIMMO
:TIMMO
:TIMMO
:TIMMO
ModelRequirements
SafetyAnalysis HybridSimulation
CalibrationInfrastructure
EnvToCBD
Environment DSL
Causal Block Diagrams
PlantToCbd
Plant DSL
ControlToSc
Control DSL
StatechartsNetwork
FormalismEncapsulated
Petrinets
Hybrid Formalism
combineCBD
AUTOSAR
ScToAUTOSAR
C-code SwToC
Algebraic Equations
ToSchedulabilityAnalysis
DEVS
ToDeploymentSimulation
Performance Trace
ExecuteCalibration
Performance Formalism
ExtractPerformance
ToInstrumented
Architecture Deployment
ScToPnPlantToPnEnvToPN
combinePN
Reachability Graph
HybridSimula-tion Trace
SimulateHybrid
BuildRG
ToBinPackingAnalysis
RefineNetwork
ModelPlant ModelControlModelEnv
ECUDeployment
DetailedDeployment
ModelNetwork
ArToMwArToRte
CcombineC
SysML Req Diagram
TIMMO
CTL
ModelContext
ExtractRequirements
ToSafetyRequirement
Extract Timing Behaviour
Refine Timing Behaviour
SysML Use Case Diagram
Textual Requirements
ModelTextualReq
Boolean
CheckCtlCheckContinuous
Petrinets
RefineUseCases
RefineRequirements
DEVS Trace
SimulateDEVS
Bin Packing Trace
CheckDEVSTrace
Schedulability Trace
CalculateSchedulability
CheckBinPacking
GenerateCalibration
CombineCalibration
RefineUseCase
Description
ModelUseCaseDescription
SearchECUSearchDetailed
CheckSchedulability
:Use Cases
:Use Case Diagram
:SearchECU
:SearchDetailed
:SearchArchitecture False
SchedulabilityAnalysis
DEVSSimulation
BinPackingAnalysis
SearchArchitectureInteger
:Integer
:Integer
:Integer
:BinPackingTrace
:SchedulabilityTrace
:DEVSTrace
1
2
2
1
3
1
Use Cases

5
Deployment Simulation
Application Layer
Run-Time Environment
OS
Communication Services
Communication Abstraction
Communication Drivers
Abstract Platform
Application Layer
Run-Time Environment
OS
Communication Services
Communication Abstraction
Communication Drivers
Abstract Platform
Application Layer
Run-Time Environment
Abstract Platform
(a) (b) (c)

6
Design-Space Exploration Full$deployment$space$
Horizontal$transforma5ons$Simulate/Analyse$Prune$bad$solu5ons$
…
Horizontal$transforma5ons$Simulate/Analyse$Prune$bad$solu5ons$
Horizontal$transforma5ons$Simulate/Analyse$Prune$Bad$Solu5ons$
Refin
emen
t$$transforma5
on$
Refin
emen
t$$transforma5
on$
Start$model$
Refin
emen
t$$transforma5
on$
Joachim Denil, Antonio Cicchetti, Matthias Biehl, Paul De Meulenaere, Romina Eramo and Serge Demeyer; Automatic Deployment Space Exploration Using Refinement Transformations; Accepted @ MPM Workshop of Models 2011

7
Explosion Exhaustive
Match
Iterate
Rewrite
ExhaustiveNext Rule
Checkpoint
nextRule?
trueRestore
Next Match
Save Solution Point
success?
success?
falsetrue
false
Random
Match
Iterate
Rewrite
Hill Climbing
Match
Iterate
Rewrite
Checkpoint
Evaluate
better?
Restore
Next Match
success?
false
no
true
RandomNext Rule
Save Solution Pointstop?
false
true
nextRule?
true false
Simulated Annealing
Match
Iterate
Rewrite
Checkpoint
Evaluateaccept?
Restore
false
temp?
iterate?
Decrease temp
true
false
true
Store Best; Clear Checkp.
falsetrue
Transform to MILP
Execute MILP
Task Mapping
Priority Assignement
Transform to MILP
Execute MILP
Transform to MM
Task Mapping
Priority Assignement
Transform to MILP
Execute MILP
Transform to MM
Task Mapping
Priority Assignement
Software to
Hardw
are m
apping
ToMILP
ExecuteMILP
ToDeployment
Random Sampling
Hill Climbing
Select Solution
enough samples?
DeploymentLanguage
MILP
ToMILP
ToDeployment
MILPTrace
ExecuteMILP
RandomSamplingHillClimbing
Joachim Denil, Han Gang, Magnus Persson, Xue Liu, Haibo Zeng, Hans Vangheluwe, "Model-Driven Engineering Approaches to Design Space Exploration", School of Computer Science, McGill University, January 2013, SOCS-TR-2013.1

8
Give Engineers the tools

9
Real-Time Preserving Instrumentation
Sine Wave
Gain Sine Wave
Gain Sine Wave
Gain
t
Normal Execution (no rate transition block):
Rate Decreased (two times):
Sine Wave
Gain Sine Wave
Sine Wave
Gain
t
10
Working on: • Heterogeneous modelling and co-simulation:
- Work with Bart Meyers: Hybrid to FMI co-sim - Work with Bert Van Acker and Claudio Gomes
(see presentation) • Extra-functional aware instrumentation of
models: - Work with Sebastian Fishmeister (U of Waterloo)
• Consistency during mechatronic design: - Work with Istvan (see presentation)
• Control – Deployment Co-Design: - Work with Ken on RTE (see presentation) - Design-space Exploration techniques for MDE

















