Chapter 4 Multichannel active noise control: stable adaptive algorithms T. Shimizu, T. Kohno, H. Ohmori and A. Sano Department of System Design Engineering, Keio University Keio, Japan, [email protected]This chapter presents stable adaptive schemes in two cases: in the first case reference microphones are available to detect unwanted primary noise, and in the second case no reference microphones are available. The latter case requires no causality condition but its availability is limited to periodic primary noises. In both cases, we propose stability-assured adaptive algorithms to update the adaptive feedforward controllers. 4.1 Introduction Active noise control, which suppresses unwanted noises generated from pri- mary sound sources at the objective points by producing artificial sounds from secondary sound sources, has recently found more and more applications in improving industrial and living environments, since it can complement tra- ditional passive technologies and attain better performance on attenuation of low-frequency noises [80, 103, 161, 171, 280]. Adaptive feedforward control schemes are essential to achieve the control performance even in the presence of model uncertainties and variations in sound path dynamics and microphones. We will investigate stable adaptive schemes in two cases: in the first case reference microphones are available to detect unwanted primary noise, and in the second case no reference microphones are available. The latter case requires Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp
Transcript
Chapter 4
Multichannel active noise control:stable adaptive algorithms
T. Shimizu, T. Kohno, H. Ohmori and A. SanoDepartment of System Design Engineering, Keio UniversityKeio, Japan, [email protected]
This chapter presents stable adaptive schemes in two cases: in the first casereference microphones are available to detect unwanted primary noise, and inthe second case no reference microphones are available. The latter case requiresno causality condition but its availability is limited to periodic primary noises.In both cases, we propose stability-assured adaptive algorithms to update theadaptive feedforward controllers.
4.1 Introduction
Active noise control, which suppresses unwanted noises generated from pri-mary sound sources at the objective points by producing artificial sounds fromsecondary sound sources, has recently found more and more applications inimproving industrial and living environments, since it can complement tra-ditional passive technologies and attain better performance on attenuationof low-frequency noises [80, 103, 161, 171, 280]. Adaptive feedforward controlschemes are essential to achieve the control performance even in the presence ofmodel uncertainties and variations in sound path dynamics and microphones.
We will investigate stable adaptive schemes in two cases: in the first casereference microphones are available to detect unwanted primary noise, and inthe second case no reference microphones are available. The latter case requires
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp
76 Active Sound and Vibration Control
no causality condition but its availability is limited to periodic primary noises.In both cases, we propose stability-assured adaptive algorithms to updatethe adaptive feedforward controllers. Conventionally, a variety of filtered-^adaptive algorithms have been employed to adjust the weights of adaptivefeedforward controllers implemented by FIR-type adaptive filters [29, 77, 78,85, 92, 209]. However, FIR filters sometimes display a serious problem ofinstability, so that the step size of the filtered-^ LMS algorithm should bechosen carefully, especially in multichannel systems. In the single channelcase, we have investigated the stability of adaptive control algorithms based onstrictly positive realness properties in the time-domain [151, 226], frequency-domain [150, 226] and wavelet transform domain [253].
In multichannel active noise control with a multiple number of primarynoise sources, secondary sources, reference microphones and error microphones,an ordinary filtered-x LMS adaptive algorithm can hardly attain both stabil-ity and quick adaptation by choosing step sizes adequately, since the pathmatrices and controllers have nondiagonal elements. In this chapter, on theassumption that the secondary channel dynamics are known a priori and notchangeable, an LMS-type robust adaptive algorithm for updating the feedfor-ward controllers is proposed which can assure the stability of the adaptationand keep each cancelling errors within a tight bound when each upper bound ofthe uncertainty terms due to disturbances and unmodelled dynamics of soundpropagation is known a priori.
Next, two identification-based approaches are investigated to deal with acase in which both the primary and secondary channel matrices are unknownand uncertainly changeable. In the approaches, we first identify equivalentprimary and secondary channel matrices in an online manner, then give twoschemes to calculate the adaptive feedforward controllers corresponding to theidentified path matrices. Finally, the effectiveness of the proposed adaptivealgorithms is investigated and compared with each other and with the conven-tional filtered-x algorithm in active noise control experiments.
4.2 Multichannel active noise control problems
Figure 4.2 illustrates a multichannel active noise control system with referencemicrophones (Case 1) and without reference microphones (Case 2).
The primary noises are generated from the Ns sources, which are denotedby s (k) € 7lNt, and are detected by Nr reference microphones in case 1. Thedetected signals r (k) £ ftNr are the inputs to the Nc x Nr adaptive feedforwardcontroller matrix C(z, k), where Nc is the number of secondary loudspeakers,
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp
Multichannel active noise control: stable adaptive algorithms 77
n(k)y(k)
e(*)
-'A !
' Adaptive |feedforward L j"
controller »-Feedbackcontroller
(a) Case 1: control system with reference microphones
s(k)
(b) Case 2: control system without reference microphones
Figure 4.1 Two types of multichannel adaptive active noise control system
which produce artificial sounds to cancel the unwanted noises 8 (k) at the Nc
objective points. The cancelling errors are detected as e(k) € TlNc by theNc error microphones. All of the primary and secondary sounds propagatingthrough different path dynamics are sensed by the reference and error micro-phones. Here Gi(z) E ZNcXN* and G2(z) e ZNTXN° represent the primary
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp
78 Active Sound and Vibration Control
channel dynamics from the primary noises 8 (k) to the reference microphonesand error microphones, respectively. G${z) e ZNrXNc and G±(z) € 2NcXNc
are the secondary channel dynamics from the secondary control sounds u (k) tothe reference and error microphone sets, respectively, where G$(z) is referredto as the feedback channel dynamics.
In case 2, since the reference microphones are not used, G2(z) and G^(z)are not needed in the implementation of the plug-in type of adaptive controllerC(z,k), and the causality assumption is not also required. However, it isassumed that the primary noises consist of multiple sinusoids with known orunknown frequencies. The parameters in C(z,k) are updated by using onlyavailable signals e(k) and u(k) as well as prior knowledge.
4.3 Structure and Algorithms
4-3.1 Error system description in Case 1
In Figure 4.2, the structure of the active noise control system is described by:
where n(k) G TZNc denote the disturbance noises which enter the systemthrough the error microphones. In order to realise active noise cancelling byusing only accessible signals r (k), u (k) and e (k) in case 1, the unknown sourcenoise s(k) should be eliminated from eqn. (4.1). By assuming Ns < Nr, theerror is described as:
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp
Multichannel active noise control: stable adaptive algorithms 79
If C*(z) is stable and the feedforward controller C(z) is chosen as eqn. (4.4),and the causality holds, then the error can be cancelled perfectly. However, thepath dynamics can hardly be modelled precisely and are uncertainly change-able, so adaptive approaches become essential.
Eqn. (4.2) gives an error system which expresses the relation betweenthe cancelling errors e(k) and parameter errors of the adaptive controller.Multiple FIR type adaptive filters are employed to realise stable controllersC(z, k) instead oiC(z), which is given by an Nc x Nr polynomial matrix theelements of which are expressed as:
% %)z-m« (4.5)
Thus the adaptive feedforward control input u (k) is given by
u{k) = C(z,k)r{k) (4.6)
where the ith element Ui(k) of the control input eqn. (4.6) is expressed by
§ k) (4.7)
where c^k) = [$> (*),<§>(*),: • - ,^ H ' ) (* ) ] r , *«(*) = M * - l),r,-(* - 2),= [cl(k),cJ2(k),---,cfNr(k)}T
Further, the control input u (k) can be rewritten into a vector-matrix formas
where £ (k) is an uncertain vector due to the disturbances and modelling error.The equivalent secondary channel dynamics G4(z) does not satisfy the
strictly positive real (SPR) property. However, if G4(z) is known, the errorsystem eqn. (4.10) can be transformed to an SPR error system, from whichwe can derive a stability-assured adaptive algorithm. It can be noticed fromeqn(4.3) that G4(z) includes all channel dynamics Gi{zYG4{z)\ then we makethe following assumptions:
Assumption J^.l: the secondary channel dynamics G$(z) and G4(z) are knowna priori.
Assumption 2: each component of the uncertain term £ (fc) is bounded as
Mk)\<h i = l,2r.-,Ne (4.11)
where each upper bound fa is known a priori.Assumption 4.1 that Gs(z) is known is equivalent to Gs(z) = 0, since thefeedback effect from G^{z) can be cancelled by subtracting Gs(z)u(k) fromthe detected signal r(k) in an algorithm. Then the error system eqn. (4.10)can be reduced to
e(k) = G4(z)[*T(k)(6* - $(k))]+t(k) (4.12)
Assumption 4.2 is effective in evaluation of upper bounds of the cancellingerror ei(k) in a strictly tight way, thus conservativeness can be avoided.
4*3.2 Robust adaptive algorithm
A robust adaptive algorithm with assured stability is given for the two errorsystems eqns (4.12) and (4.22). By introducing an auxiliary signal vector ea(k)and an extended error vector r\ (k) as:
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp
Multichannel active noise control: stable adaptive algorithms 81
which satisfies the SPR property. Then we can give the robust adaptive algo-rithm with dead zone decision by which the controller parameter vector canbe updated in a stable manner.Robust adaptive algorithm:
1) = 0(k) + 7(*)* (*)«(*) (4.17a)
GA(z)u{k) - *T(k)d(k) (4.17c)
(4.17d)
(4.17e)r}i(k)<-&
where 0 < a < 1, and d > 0 is a positive small constant.The convergency of the updated parameter vector and the boundedness of
the cancelling error vector in the above algorithm are given in the following.Property of adaptive algorithm in eqn. (4.17):
lim 9 (k) = constant (4.18a)fc—voolimsup|ei(*)| = A (4.18b)
k—>ooComparison with ordinary filtered-x algorithms:Ordinary LMS-type filtered-x algorithms are described by:
= e{k) + T * ( * ) C ( * ) (4.19a)T *T(*) (4.19b)
However, the algorithm cannot assure the stability for arbitrary step size evenif there are no modelling errors and disturbances, so the step size 7 shouldbe carefully selected by compromising the stability and convergence rate. Theproposed algorithm eqn. (4.17) has the following distinctive features, unlikeordinary methods:
(i) The parameter vector d(k) is adaptively adjusted according to i)(k), un-like the conventional filtered-x algorithm which uses the actual cancellingerror e(k).
(ii) The step size j(k) is variable in accordance with the errors and signals,and does not include matrix inversion (as described later) but only scalarnormalisation, which can reduce computational complexity.
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp
82 Active Sound and Vibration Control
(iii) Each worst cancelling error can be estimated independently in a tighterbound by using the upper bound of each component of the vector £ (k) asgiven in eqn. (4.11), rather than its Euclidean norm such as ||£(fc)|| < /3which tends to overestimate the cancelling errors.
4*3.3 Error system description in Case 2
In case 2, it is assumed that the primary source noises consist of a multiplenumber of sinusoids with known frequencies. Then the causality condition isnot needed in its implementation without using the reference microphones. Itfollows from Figure 1 (b) that the cancelling error e (A;) is expressed as:
e(k) = Gi(z)s(k) - G4(z)u{h) + n(k) (4.20)
and the ith. primary source noise is expressed by:
M
f (4.21)
whereg^k) = [an,/3iu...,aiM,/3iM]Tand </>i{k) = [sinuak,cosuak,... ,sinuiMk,coscjjAffc]- The amplitudes of the sinusoids are unknown but their frequenciesare known a priori. M is set to an upper bound of the number of sinusoids.In the case of unknown frequencies, a frequency estimation algorithm can beused at the same time. G\(z) is unknown but G±(z) is assumed to be known.
Then, the cancelling error eqn. (4.20) can be rewritten into:
e(k) = G4(z)[9T(k)e* -u(T (4.22)
where * ( * ) = D i a g ^ A ) , ••• , 0 * J , 0(k) = [ex{k)9 •--, 9Ne{k). Thus t headapt ive control is given by:
u(k) = $T(k)O(k) (4.23)
It can be noticed that the error system of eqn. (4.22) in Case 2 has thesame structure as does eqn. (4.12) in Case 1. Therefore, the robust adaptivealgorithm given in eqn. (4.17) can also be applied to Case 2.
Other adaptive approaches are also applicable to Case 2 with periodicprimary noise sources, based on the plug-in adaptive control approach [207,225]. Adaptive feedback control schemes are also applicable in the periodicnoise case, by estimating their frequencies in an online manner.
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp
Multichannel active noise control: stable adaptive algorithms 83
4.4 Identification-based adaptive control in case 1
4-4-1 Identification of equivalent primary and secondary channel matrices
When G4(z) is uncertain, an alternative approach adopting identification-based algorithms will be required. Since the cancelling error is given by eqn.(4.2), the equivalent primary and secondary channel matrices G\(z) and G4(z)can be identified as FIR models by using the accessible data r(k), u{k) ande(k) as:
G4(z)=H4(z)(4.24a)(4.24b)
where An(z) are the truncated errors and Hn(z) are given for n = 1 and 4as:
Hn(z) =HnlNr(z)
where
By using the above notations, the error system of eqn. (4.2) can be de-scribed by:
e(k) =
where
- H4{z)u(k) + A1(z)r(k) - A4(z)u(k) + n(
T
T hTh1 hT
1> * " > " ' l i i \ T r > ' M i l >
(4.25)
4ij —
*{k - 1),
C(*) = Al(z)r(k) - n(*)
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp
84 Active Sound and Vibration Control
The estimate of the FIR model h is updated by the robust LMS algorithmwith the proposed scalar normalisation as:
- Awhere let e(k) be referred to as the identification error, and $ denotes anupper bound satisfying \&(k) < $ , and let 0 < a' < 1 and d! > 0.
The persistently exciting (PE) property of the control sound from the sec-ondary loudspeaker is needed in the above identification. When the PE condi-tion is not satisfied, a dither signal vector d(k) can be introduced and addedto the control signal vector u(k) in the following way:
Ui(k) + di(k) (4.27a)
di(k) = feT{k - l)vi(k) (4.27b)
where Vi(k) is a zero mean white noise vector satisfying the following property:
E[vi(k)vJ(m)} =
In the scheme, the white noise v,-(fc) is amplitude-modulated by the cancellingerror eT(k -1 ) . Therefore, when the magnitude of the cancelling error is large,the effort of the dither signal will be large, resulting in high identification accu-racy, and when the magnitude of the cancelling error is small, the influence ofthe dither signal will become small correspondingly to preserve the cancellingperformance.
4*4-2 Identification-based adaptive controller
Two approaches are discussed for designing the adaptive feedforward controllerbased on the identified channel matrices.4.4-2-1 Indirect design of adaptive controlBy using the identified model of the channel matrices, the adaptive feedforwardcontroller can be calculated by eqn. (4.4) in an online manner as:
\ z ) (4.28)
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp
Multichannel active noise control: stable adaptive algorithms 85
The calculation needs the inversion of the matrix. However, if the inversionformula for H4 (z) can be implemented, the controller is obtained via onlycomplex manipulations with the FFT and inverse FFT. The details will begiven in the experimental study in a case with Ns = Nr = Nc = 2.4.^.2.2 Error system updating schemeIf Gi (z) and G±(z) are identified as H\{z) and H^z), the error system ofeqn. (4.10) can also be replaced by:
e(*) = H4(z)[*T(k)(d* - *(*))] + €(* ) (4.29)
As already stated, the above error system can also be rewritten into
Then the robust adaptive algorithm is given by replacing eqn. G±(z) in (4.17)with H4(z).
Updating H4(z) in the error system and the robust adaptive algorithmeqn. (4.17)at every instant by the identified channel dynamics cannot alwaysassure the stability of the adaptation. We consider two kinds of error: one isthe cancelling error norm ||e(A;)|| or its increasing rate ||e(A;) — e(k — 1)||, andthe other is the identification error norm ||e(A)||. Then we give the decisionrule for updating the error system as follows:
(i) Minimum interval for updating the error system eqn. (4.30) should bechosen to be more than the order of the model H±{z).
(ii) If the moving average of the identification error ||e(A;)|| is smaller thana threshold value Cj and the moving average of the increasing rate ofcancelling error ||e(fc) - e(k - 1)|| is larger than a threshold CE, thenthe error system should be updated.
4.5 Experimental results using the proposed adaptive algo-rithms
Figure 4.2 illustrates the experimental setup for the adaptive active noise con-trol in a room. Sound reflections on the room walls are suppressed passivelyas much as possible. Two primary loudspeakers A and B, two reference micro-phones A and B, two secondary loudspeakers C and D, and two error micro-phones C and D are placed initially at indicated locations, configuring a multi-channel active noise control system with the dimensions of N3 — Nr = Nc = 2.
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp
86 Active Sound and Vibration Control
Figure 4.2 Experimental setup for adaptive active noise control in a room
To realise the multichannel adaptive algorithm, five DSP (TMS320-C40) chipsare used for performing parallel computation, where the sampling period ischosen as 1 ms. The power spectra of the primary sources are limited in thelow-frequency range from 50 to 450 Hz. The order of the FIR adaptive con-trollers is set at 64, which is selected according to off-line identification resultsof each channel. To investigate the proposed robust direct adaptive algorithmand the identification-based indirect adaptive algorithm, as well as the conven-tional filtered-x algorithm, the experiments are performed with the followingtwo channel dynamics change cases:Case 1: two reference microphones are moved continuously from the initialpositions (about 70 cm from the primary loudspeakers) to the end positions(about 140 cm from each corresponding loudspeaker) in between 10 and 30seconds. These movements of the reference microphones will result in large
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp
Multichannel active noise control: stable adaptive algorithms 87
changes in G^iz) and moderate changes in G$(z), and no changes in G\(z)and G±(z).Case 2: two error microphones are moved continuously from the initial po-sitions (34 cm from the secondary loudspeakers) to the end positions (70 cmfrom the loudspeakers) in between 10 and 30 seconds. These movements of theerror microphones will result in large change in G^z) and moderate changesin Gi(z), and no changes in G2(z) and Gs(z).
The main difference between Case 1 and Case 2 lies in whether the channeldynamic G^z) is changed or not. In Case 1 the secondary channel dynamicG^z) is not changeable, and therefore we can apply all the proposed algo-rithms, the stability-assured robust adaptive algorithm given by eqn. (4.17),the indirect adaptive algorithm given by eqn. (4.26) and eqn. (4.28) and theerror system updating algorithm given by eqn. (4.26) and eqn. (4.30). InCase 2 G±{z) is changeable and the robust adaptive algorithm in eqn. (4.17)cannot be applicable.
Figure 4.5 shows the cancelling error at one objective point obtained inCase 1, and Figure 4.5 gives the cancelling error obtained in Case 2. Theadaptive control algorithms adopted corresponding to each subfigure (a) to(e) in Figs.4.5 and 4.5 are described as follows:(a) No control: no active noise control is done.(b) Normalized filtered-x algorithm: although normalisation is employed for im-proving stability, stability is not assured in this algorithm, which is describedby:
O(k + l) = 0(k)+j[I+i*T(k)*(k)]-1*(k)e(k) (4.31)
In the experiment, the step size is selected to be as large as 7 = 103 forattaining fast convergence. A model identified prior to the experiment is usedas G4(z) in the error system. However, since G±{z) is changed during theinterval from 10 to 30 seconds, the algorithm may not be stability assured.(c) Robust adaptive algorithm (proposed): the algorithm is given by eqn. (4.17).In the experiment, the parameters in eqn (4.17) are selected as a = 0.8,d = 10~6, /3i = fo = 0.002. To get satisfactory control performance forcompromising both cancellation and stability, it is better to select Pi as 1/5 ~1/10 of the average absolute value of the cancelling error et(A) in the steady-state when fa = 0 .(d) Indirect adaptive control algorithm (proposed): path dynamics Hi(z) andJf 2(2) are identified in an online manner by use of eqn. (4.26), where thedither signals are also added to the control sound u(k) according to eqn.(4.27). The magnitude of the dither signal is selected as 10 per cent of that
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp
88 Active Sound and Vibration Control
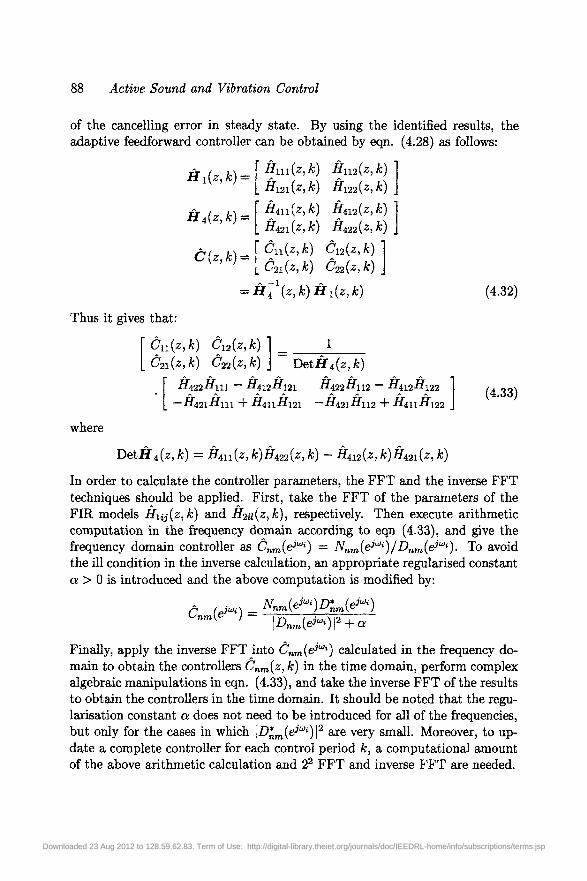
of the cancelling error in steady state. By using the identified results, theadaptive feedforward controller can be obtained by eqn. (4.28) as follows:
In order to calculate the controller parameters, the FFT and the inverse FFTtechniques should be applied. First, take the FFT of the parameters of theFIR models Huj(z^k) and H2ii(z,k)^ respectively. Then execute arithmeticcomputation in the frequency domain according to eqn (4.33), and give thefrequency domain controller as Cnm(ejuJi) = Nnm(ejU}i)/Dnm(ejuJi). To avoidthe ill condition in the inverse calculation, an appropriate regularised constanta > 0 is introduced and the above computation is modified by:
Finally, apply the inverse FFT into Cnm(eju;i) calculated in the frequency do-main to obtain the controllers Cnm(z, k) in the time domain, perform complexalgebraic manipulations in eqn. (4.33), and take the inverse FFT of the resultsto obtain the controllers in the time domain. It should be noted that the regu-larisation constant a does not need to be introduced for all of the frequencies,but only for the cases in which l-DJj^e**)!2 are very small. Moreover, to up-date a complete controller for each control period &, a computational amountof the above arithmetic calculation and 22 FFT and inverse FFT are needed.
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp
Multichannel active noise control: stable adaptive algorithms 89
(e)Error system updating scheme (proposed): the adaptive algorithm is givenby eqns (4.26) and (4.30). Similar to (d), we first identify Hi(z) and H2(z) inan online manner, then we update the error system in an appropriate timing.The timing is decided as follows: if the moving average of the identificationerror ||e (k) || is smaller than a threshold value Cj and the moving average of theincreasing rate of cancelling error ||e (k) - e (k - 1) || is larger than a thresholdCE, the error system may be updated by replacing the error dynamics withthe recently identified G^{z).In Case 1, where G±(z) is known a priori and unchangeable, all of the adaptivealgorithms can give fast convergence after the start of control, but when thereference microphones are moved, the filtered-x algorithm (6) diverged about10 seconds after the movement, although G±{z) is available and the algorithmis normalised. On the other hand, since the proposed adaptive algorithm (c)can assure the update stability when G±{z) is known and unchangeable, itcan maintain its high control performance. For the two identification-basedadaptive algorithms (d) and (e), since the generalized primary and secondarychannel dynamics in the on-line manner, the stable control results can beachieved, but comparing with (c) where a relatively accurate secondary channeldynamics G±{z) is known, their control performances become worse.In Case 2, where the secondary channel dynamics G±(z) is uncertainly change-able, as the algorithms (6) and (c) use prior information on G4(z), both al-gorithms diverged at 14 seconds after the error microphones moved. On theother hand, since the adaptive algorithms (d) and (e) make use of the on-line identification results of the generalised primary and secondary channeldynamics, their stable control performance can be maintained. Owing to real-time identification, algorithm (d) has high adaptability, but it needs a largeamount of FFT and inverse FFT computation. Comparing with (d), the can-celling performance of (e) is worse, but the amount of computation is muchless. Figure 4.5 illustrates the moving average of the squares cancelling errorand identification error obtained by algorithm (e). It shows that the cancellingerror increased greatly after the error microphones were moved, while the iden-tification error changed a little because the identification excited by the dithersignals is well performed. Thus, the error system dynamics are updated andthe adaptation divergence is controlled.
4.6 Conclusions
Adaptive controller construction and a robust adaptive algorithm with assuredstability for realising multichannel adaptive ANC, which involves multiple of
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp
90 Active Sound and Vibration Control
primary noises, secondary control sources, reference and error microphoneshave successfully been achieved. The proposed algorithm can keep each can-celling error independently within a tight bound and does not need to calculatethe inverse matrix when the secondary channel dynamics are known a priori.In the case when the secondary channel dynamics are uncertain, identification-based adaptive algorithms have also been proposed. The effectiveness of theproposed algorithms has been validated in the experiments.
4.7 Appendix: proof of the theorem
Consider a candidate for the Lyapunov function as:
V(k) = 9T(k)0(k) = \\6(k)\\2 (4.34)
where 9(k) = 0* — 0(k). Then the time difference of V(k) can be written:
AV(k) = \\d(k + l)\\2-\\d(k)\\2 (4.35)
Rewriting eqn. (4.17) gives:
9{k + 1) = d(k) - 7(ft)*(A)fl(A) (4.36)
Substituting eqn. (4.36) into eqn. (4.35) and using eqns (4.15) and (4.17)leads to:
= -27(17 - Z)Tv
= -27(17 " 0T*7 + 2a7jf>7 ' ' T*.~T1= ( 4 3 7 a )
<-27(r7-£)Tf7+27f7Ti7Nc
= ~27 Y2 [(Vi - &) Vi - ^?] (4.37b)
where the time index k is omitted for the purpose of simplicity. By makinguse of the following inequality [234]:
(Vi - 6) Vi > Vi (4.38)
it follows from eqn. (4.37) that AV < 0 can be confirmed. Therefore it canbe concluded that the algorithm in eqn. (4.17) can ensure that:
\\6(k)\\2 <\W(k-l)\\2 <---<\\6(0)\\'2 (4-39)
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp
Multichannel active noise control: stable adaptive algorithms 91
or the sequence {|| 0(k) ||2}o° is a nonincreasing sequence bounded below byzero and thus converges. Hence it can be obtained that:
= Mm 7(*) { £ [(1 - «)*£(*) + Q(*) I Vi(k) |] + d7(fc)/2} (4.45)
Since it follows that (1 - a) > 0, a(k) > 0, d > 0 and 7(fc) > 0, it is clearthat eqn. (4.45) is equivalent to:
lira 7(*) = 0
Since {rt(&) : i = 1,2, • • •, 7VC} are bounded and j(k) is a zero-order variableoifj(k), it can be seen from eqn. (4.17) that the second equation of eqn. (4.46)
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp
92 Active Sound and Vibration Control
is just the solution of the first. Therefore, the solution of eqn. (4.46) can besummarised by:
lim i)i(k) = 0 (4.47)
Based on the result from eqn. (4.17), it can be shown that d(k) is convergent,which gives eqn. (4.18), and from eqn. (4.17) it can be obtained that rji(k) isbounded by $ (A;), as:
A- (4.48)
As a result of d(k) converging to a constant vector, the two terms of theright-hand side in eqn. (4.13) will be cancelled in the steady-state due to thefact that the calculation sequence of the converged parameter vector 0 (A;), or aconstant vector, relating to the operator G4(z) can be changed, which indicatesthat ea{k) approaches zero and in return t){k) approaches e(k) according toeqn (4.14):
lim 77^) = lim[e(Jfc)~ea(ifc)]k—¥oo k—^oo
= lim e(k) (4.49)k—>-oo
Then eqn. (4.49) can be obtained from eqn (4.49) and (4.4S).
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp
Multichannel active noise control: stable adaptive algorithms 93
10 15 20 25 30
(a) No control
0.051-
lu
-0.05 f-
!
• , ' I i i
•^m '
™ i i
' "
\ -
f "15 ZO 25 30 35
(b) Normalized iiltered-ar algorithm eqn. (4.31)
) 5
I'
10 15 20TliM[Mc]
25 30 35 41
(c) Robust adaptive algorithm eqn. (4.17)
(d) Indirect adaptive control algorithm eqns (4.26) and (4.33)
35 40
(e) Error system updating scheme eqns (4.26) and (4.30)
Figure 4.3 Changes in channel dynamics by movement of reference micro-phones: Comparison of canceling error e\ (k) obtained by variousalgorithms
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp
94 Active Sound and Vibration Control
15 20Time[s.c]
(a) No control
30 35 40
(b) Normalized filtered-a; algorithm eqn. (4.31)
10 15
(c) Robust adaptive algorithm eqn. (4.17)
15 20 30 35 40
(d) Indirect adaptive control algorithm eqns (4.26)and (4.33)
(e) Error system updating scheme eqns (4.26)and (4.30)
Figure 4.4 Changes in channel dynamics by movement of error microphones:Comparison of cancelling error e\(k) obtained by various algo-rithms
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp
Multichannel active noise control: stable adaptive algorithms 95
20 25Time [sec]
(a) Cancelling error norm by eqns (4.26) and (4.30)
20 25Time [sec]
(b) Identification error norm by eqns (4.26) and (4.30)
Figure 4.5 Cancelling error and identification error obtained by error systemupdating scheme (e)
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp