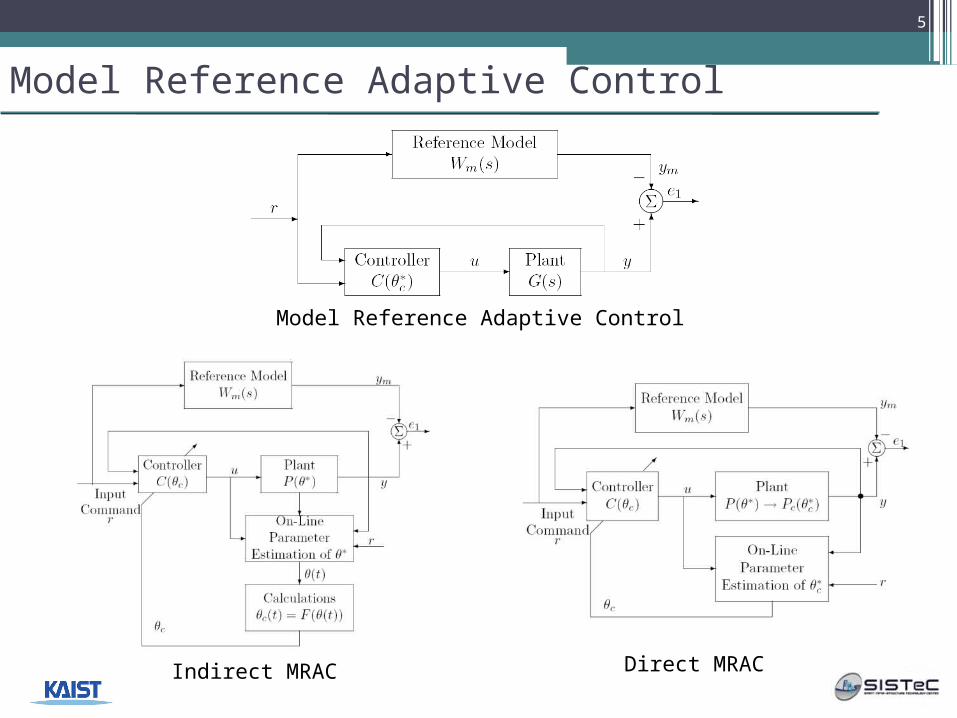
Active Structural Control - Intelligent Control - Hyun Myung, Ph.D. Dept. of Civil & Env. Engg KAIST Robotics Program [email protected]http://web.kaist.ac.kr/~ceerobot sia-Pacific Student Summer School 2008
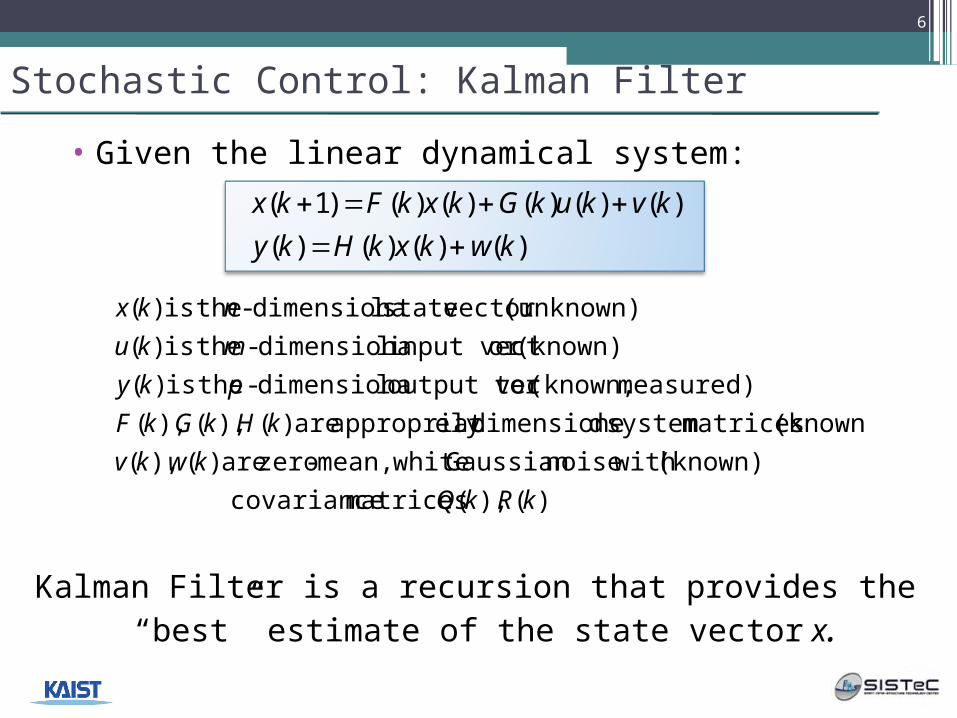
Kalman Filter is a recursion that provides the “best” estimate of the state vector x.
)()()()(
)()()()()()1(
kwkxkHky
kvkukGkxkFkx
6
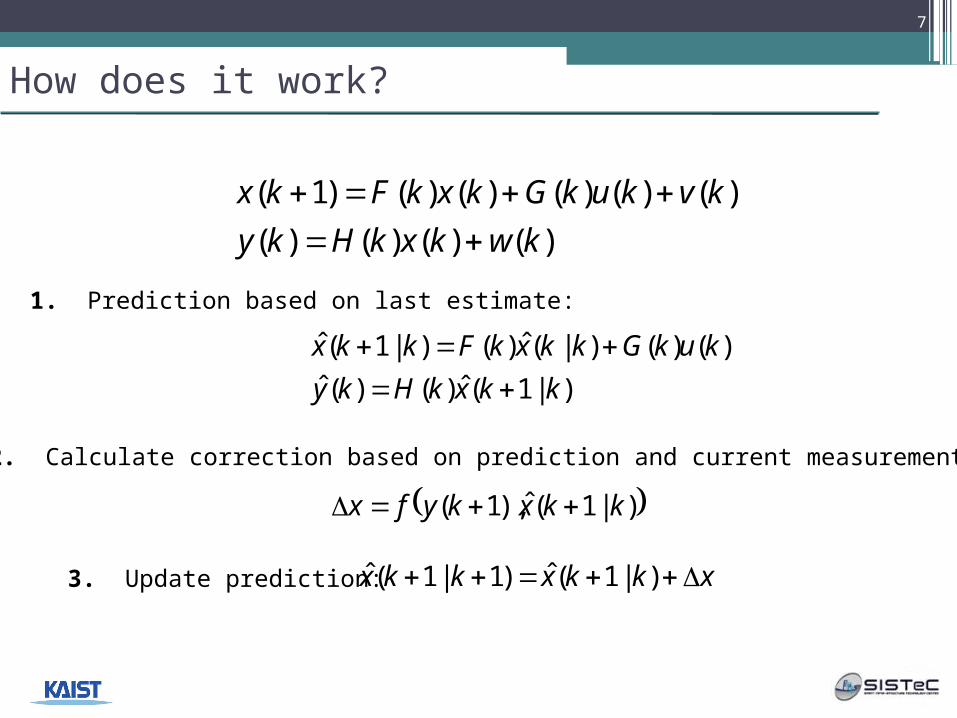
How does it work?
x k F k x k G k u k v k
y k H k x k w k
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
1
)|1(ˆ)()(ˆ
)()()|(ˆ)()|1(ˆ
kkxkHky
kukGkkxkFkkx
1. Prediction based on last estimate:
2. Calculate correction based on prediction and current measurement:
)|1(ˆ),1( kkxkyfx
3. Update prediction: xkkxkkx )|1(ˆ)1|1(ˆ
7
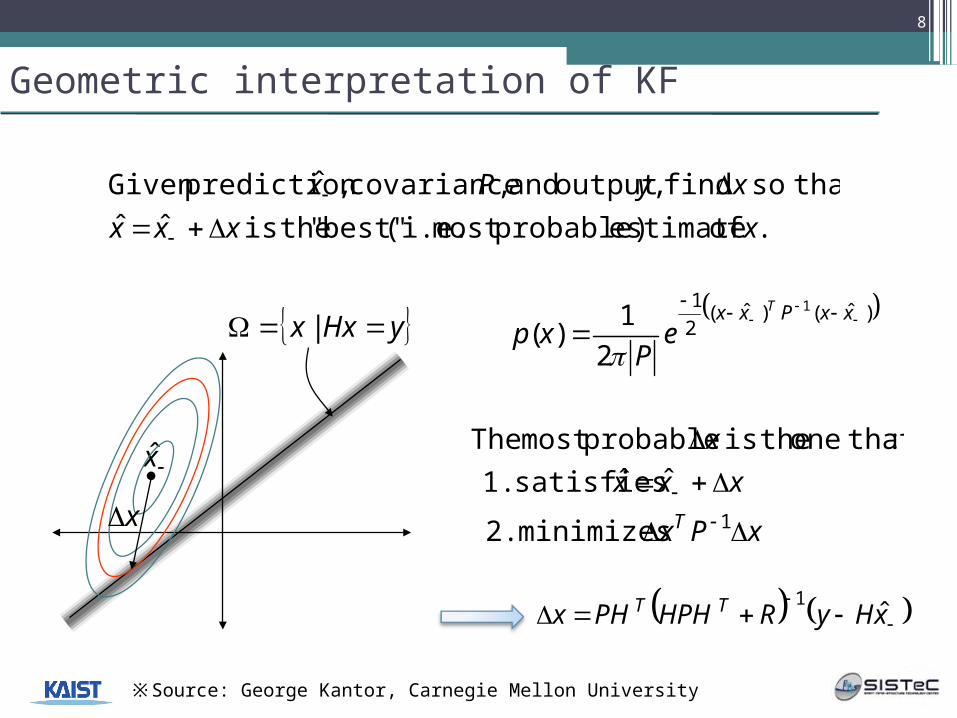
Geometric interpretation of KF
)ˆ()ˆ(2
1 1
2
1)(
xxPxx T
eP
xp
. of estimate probable)most (i.e. best"" theis ˆˆ
that so find ,output and , covariance ,ˆ predictionGiven
xxxx
xyPx
yHxx |
x̂
x xPx
xxx
x
T
1 minimizes 2.
ˆˆ satisfies 1.
: thatone theis probablemost The
8
※Source: George Kantor, Carnegie Mellon University
xHyRHPHPHx TT ˆ1
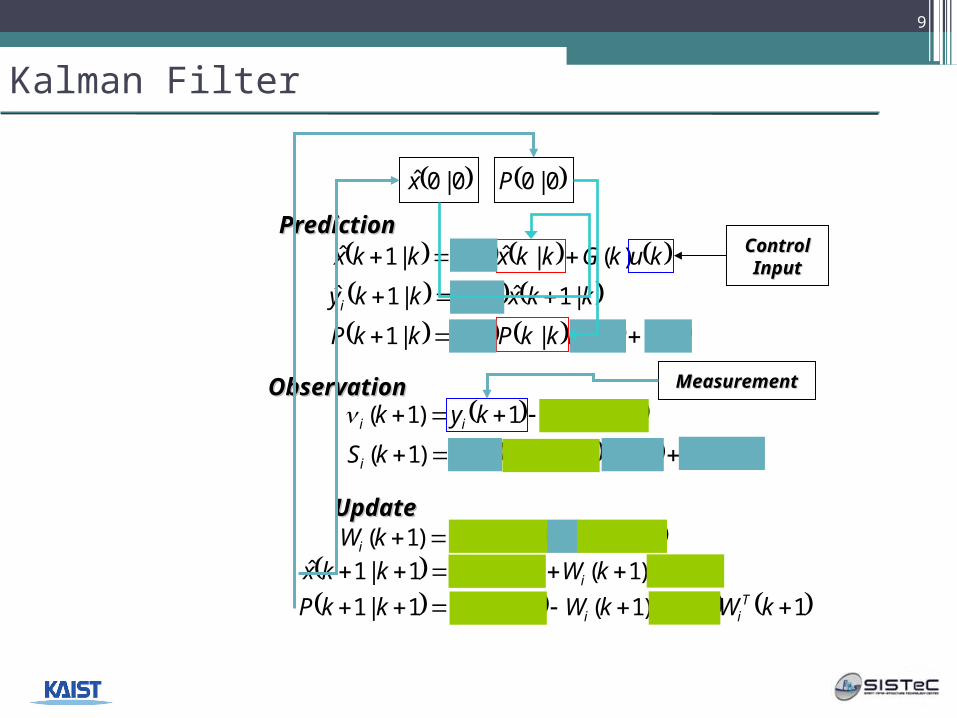
Kalman Filter
kukGkkxkFkkx )(|ˆ|1ˆ
kkxkHkky ii |1ˆ|1ˆ
kQkFkkPkFkkP T ||1
kkykyk iii |1ˆ1)1(
1|1)1( kRkHkkPkHkS iTiii
1)1(|1ˆ1|1ˆ kkWkkxkkx ii 11)1(|11|1 kWkSkWkkPkkP T
ii
1|1)1( 1 kSHkkPkW iTii
0|0x̂ 0|0P
Control Control InputInput
MeasuremenMeasurementt
PredictionPrediction
ObservationObservation
UpdateUpdate
9
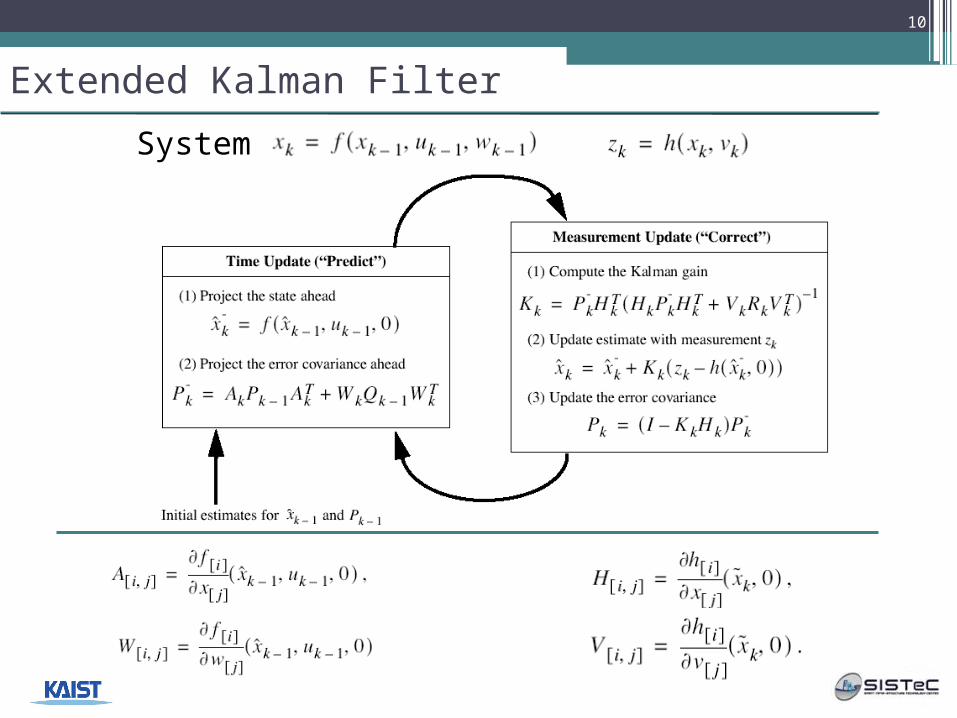
Extended Kalman Filter
System:
10
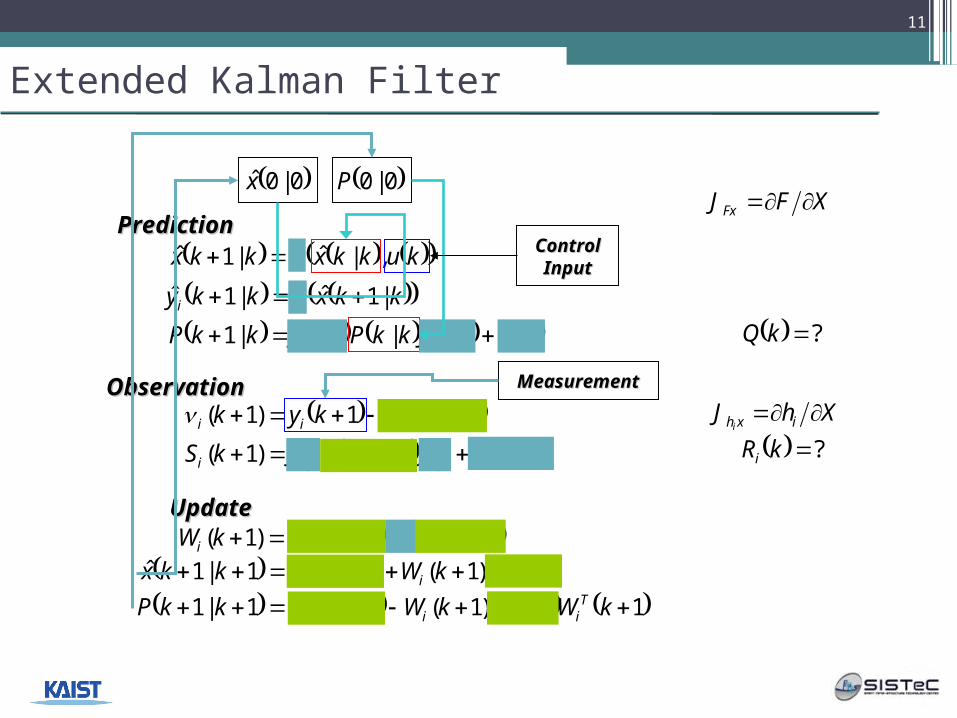
Extended Kalman Filter
kukkxFkkx ,|ˆ|1ˆ
kkxhkky ii |1ˆ|1ˆ
kQkJkkPkJkkP TFxFx ||1
kkykyk iii |1ˆ1)1( 1|1)1( kRJkkPJkS i
Txhxhi ii
1)1(|1ˆ1|1ˆ kkWkkxkkx ii 11)1(|11|1 kWkSkWkkPkkP T
ii
1|1)1( 1 kSHkkPkW iTii
0|0x̂ 0|0P
Control Control InputInput
MeasuremenMeasurementt
PredictionPrediction
ObservationObservation
UpdateUpdate
XFJ Fx
XhJ ixhi
?kQ
?kRi
11
Stochastic Control: Particle Filter - Motivation
• The trend of addressing complex problems continues
• Large number of applications require evaluation of integrals
• Non-linear models
• Non-Gaussian noise
12
※Reference: M. S. Arulampalam, S. Maskell, N. Gordon, and T. Clapp, “A tutorial on particle filters for online nonlinear/non-gaussian Bayesian tracking,” IEEE Transactions on Signal Processing, vol. 50, no. 2, pp. 174–188, 2002.
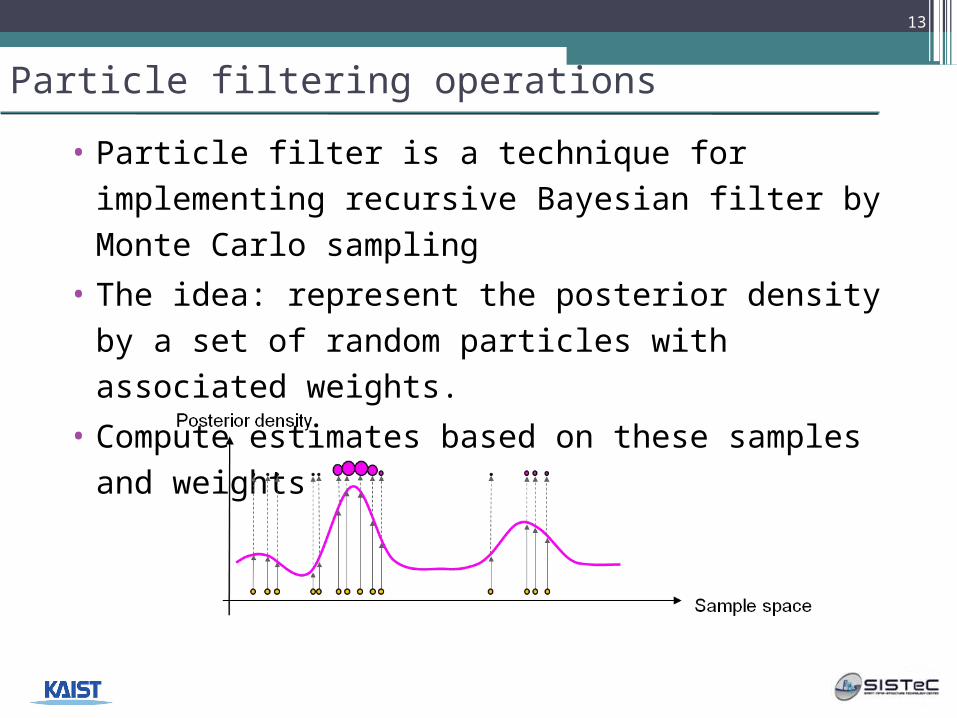
Particle filtering operations
• Particle filter is a technique for implementing recursive Bayesian filter by Monte Carlo sampling
• The idea: represent the posterior density by a set of random particles with associated weights.
• Compute estimates based on these samples and weights
13
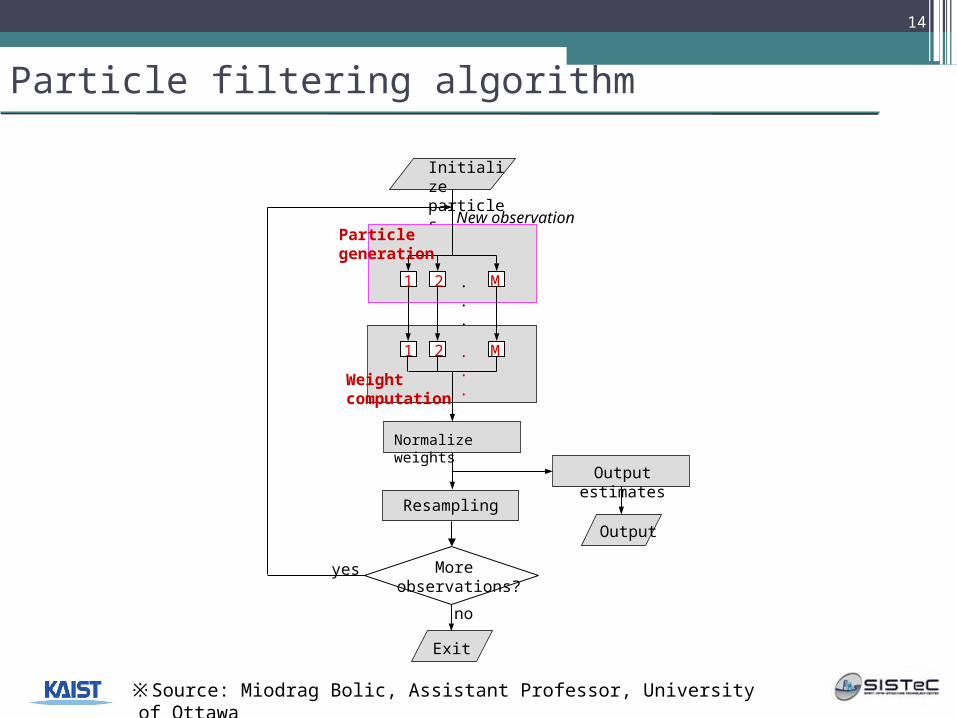
Particle filtering algorithm
14
Initialize particles
Output
Output estimates
1 2 M. . .
Particlegeneration
New observation
Exit
Normalize weights
1 2 M. . .Weight
computation
Resampling
More observations?
yes
no
※Source: Miodrag Bolic, Assistant Professor, University of Ottawa
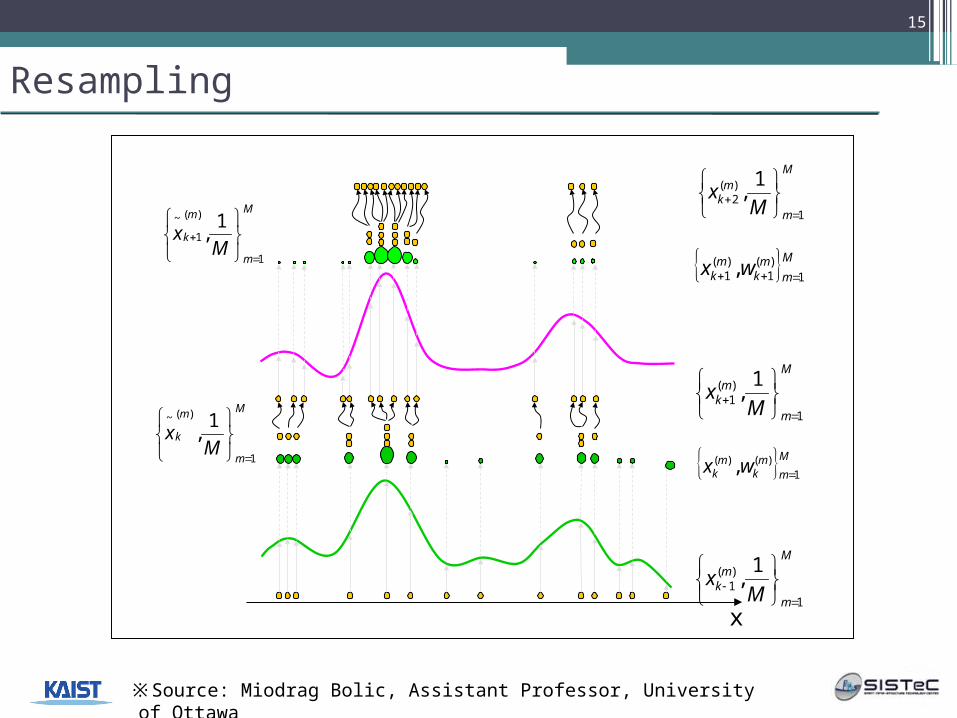
Resampling
M
m
mk M
x1
)(1
1,
x
M
mm
km
k wx 1)()( ,
M
m
m
kM
x1
)(~ 1,
M
m
mk M
x1
)(1
1,
M
mm
km
k wx 1)(1
)(1 ,
M
m
m
kM
x1
)(
1
~ 1,
M
m
mk M
x1
)(2
1,
15
※Source: Miodrag Bolic, Assistant Professor, University of Ottawa
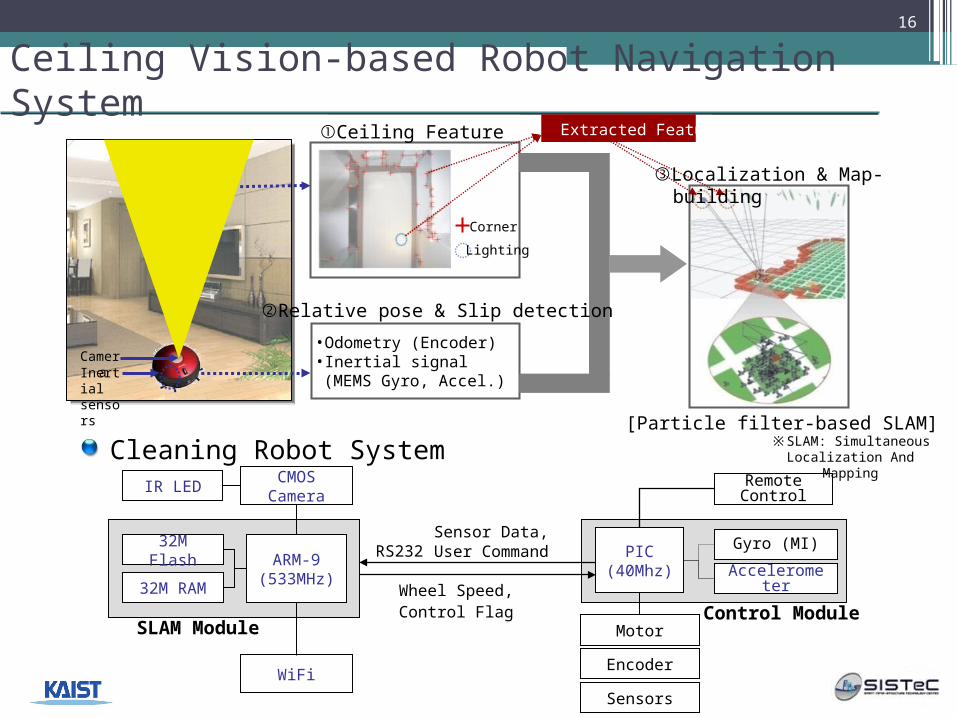
Ceiling Vision-based Robot Navigation System
[Particle filter-based SLAM]
•Odometry (Encoder)•Inertial signal (MEMS Gyro, Accel.)
Extracted Features①Ceiling Feature Extraction
Camera
Cleaning Robot System
ARM-9(533MHz
)
32M Flash
32M RAM
PIC(40Mhz)
Wheel Speed,Control Flag
Sensor Data,User
Command
CMOS Camera
Encoder
Gyro (MI)
Sensors
Accelerometer
Motor
Remote Control
WiFi
RS232
IR LED
SLAM ModuleControl Module
Inertial sensors
Corner
Lighting
③Localization & Map-building
②Relative pose & Slip detection
16
※SLAM: Simultaneous Localization And
Mapping
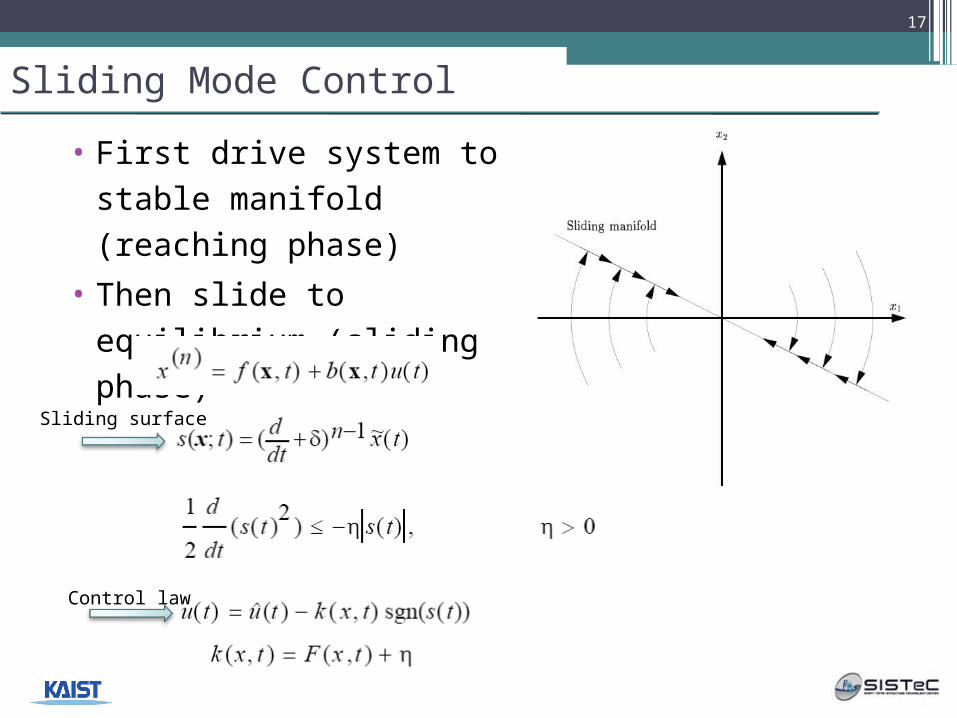
Sliding Mode Control
• First drive system to stable manifold (reaching phase)
• Then slide to equilibrium (sliding phase)
17
Control law
Sliding surface
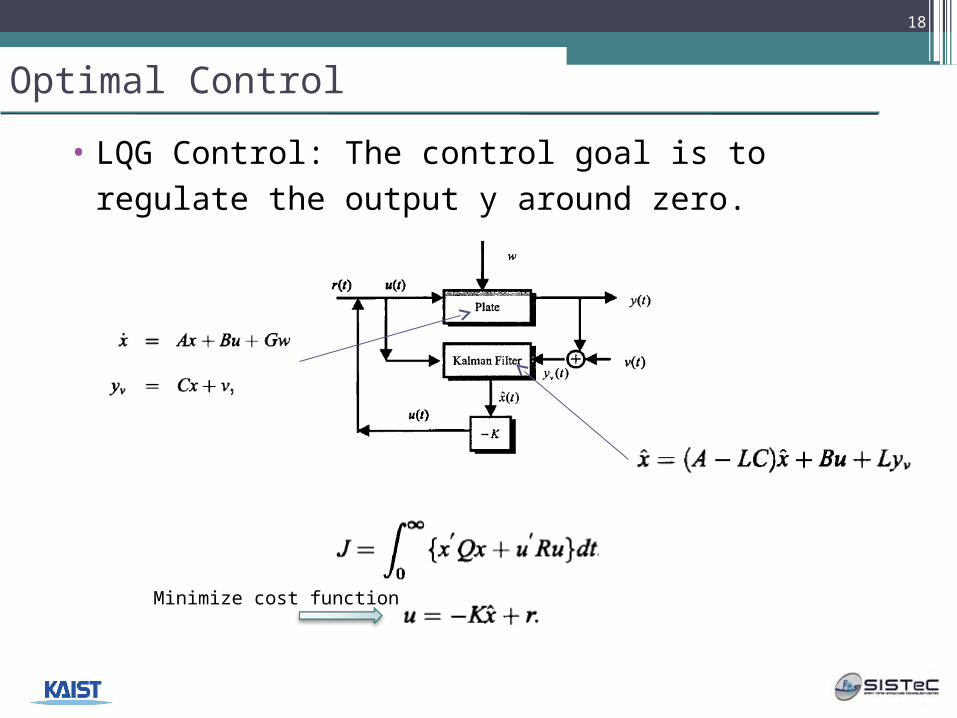
Optimal Control
• LQG Control: The control goal is to regulate the output y around zero.
18
Minimize cost function
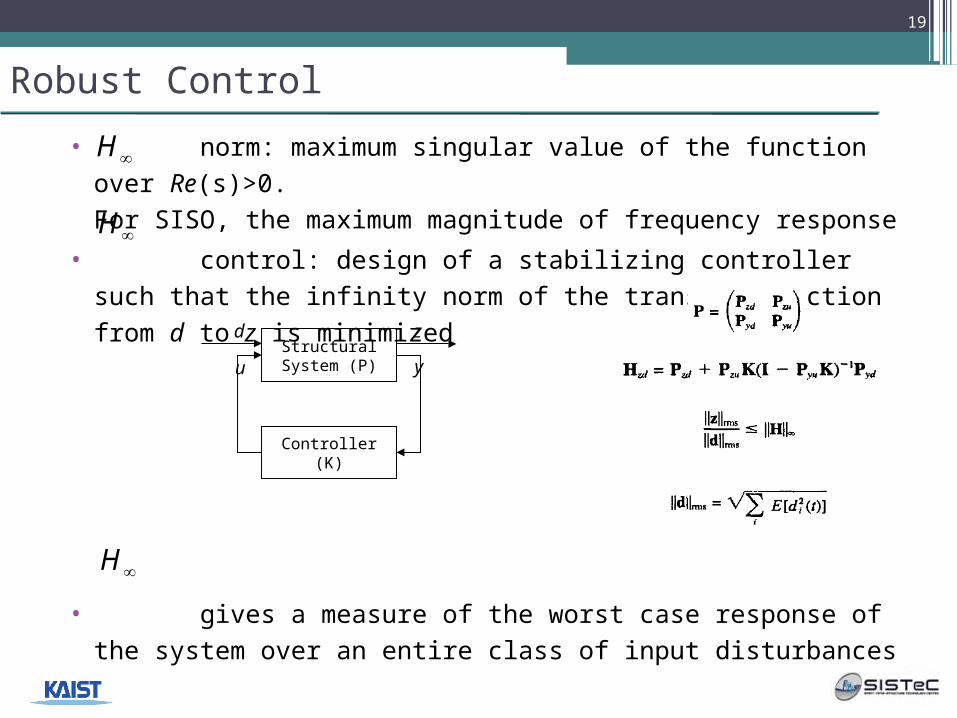
Robust Control
• norm: maximum singular value of the function over Re(s)>0. For SISO, the maximum magnitude of frequency response
• control: design of a stabilizing controller such that the infinity norm of the transfer function from d to z is minimized
• gives a measure of the worst case response of the system over an entire class of input disturbances
19
H
H
Structural System (P)
Controller (K)
d
u y
z
H
Eye Fusion
20
Intelligent Control
• Neural networks-based control
• Fuzzy logic control
• Neuro-fuzzy control
• GA-neuro control
• GA-fuzzy control
21
22
Biological inspirations
• Some numbers…
▫The human brain contains about 10 billion nerve cells (neurons)
▫Each neuron is connected to the others through 10,000 synapses
• Properties of the brain
▫It can learn, reorganize itself from experience
▫It adapts to the environment
▫It is robust and fault tolerant
23
Definition: Artificial Neural Network
• An analysis paradigm very roughly modeled after
the massively parallel structure of the brain.
• Simulates a highly interconnected, parallel computational structure with numerous relatively simple individual processing elements.
• Some differences between biological and artificial neurons (processing elements):
▫ Signs of weights (+ or -)
▫ Signals are AC in neurons, DC in PES
▫ Many types of neurons in a system; usually only a few at most in neural networks
▫ Basic cycle time for PC (~100 ns) faster than brain (10-100ms) {as far as we know!}
24
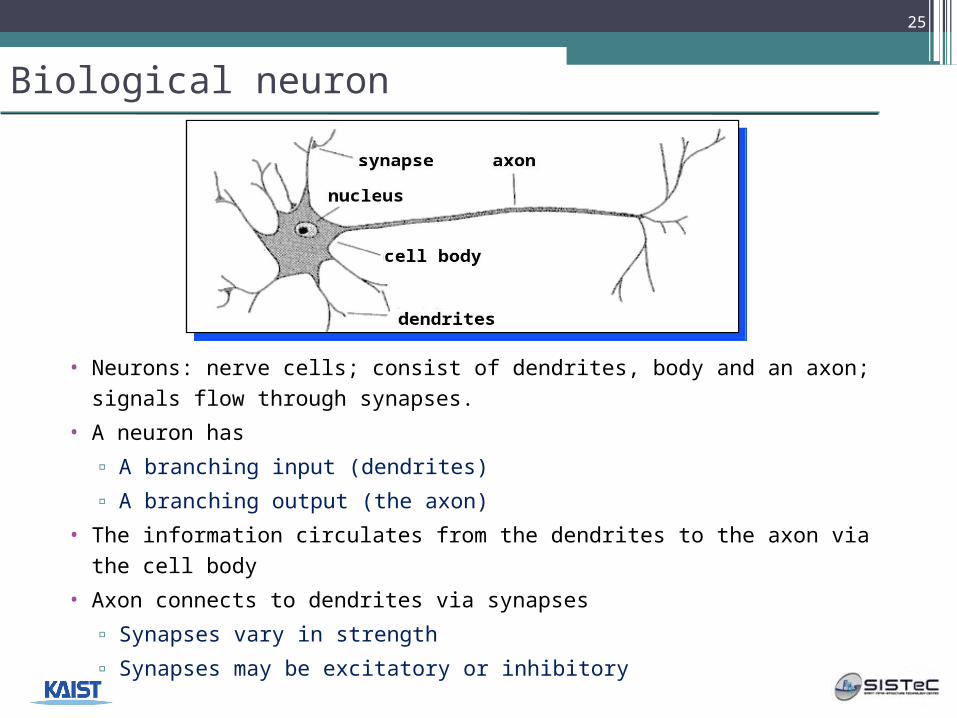
Biological neuron
• Neurons: nerve cells; consist of dendrites, body and an axon; signals flow through synapses.
• A neuron has
▫ A branching input (dendrites)
▫ A branching output (the axon)
• The information circulates from the dendrites to the axon via the cell body
• Axon connects to dendrites via synapses
▫ Synapses vary in strength
▫ Synapses may be excitatory or inhibitory
25
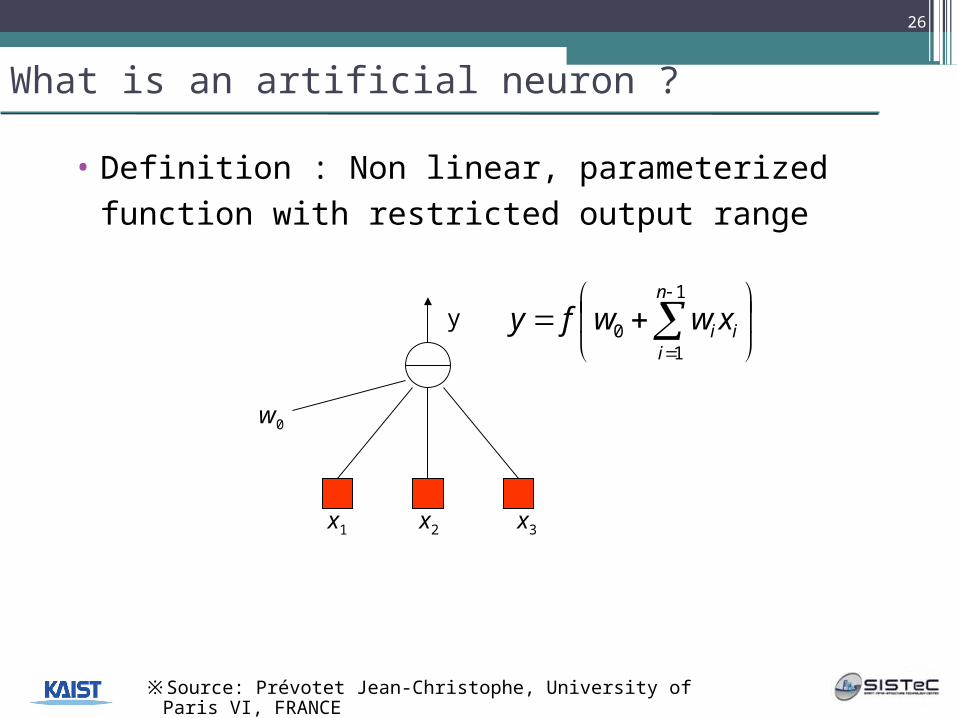
What is an artificial neuron ?
1
10
n
iii xwwfy
• Definition : Non linear, parameterized function with restricted output range
x1 x2 x3
w0
y
26
※Source: Prévotet Jean-Christophe, University of Paris VI, FRANCE
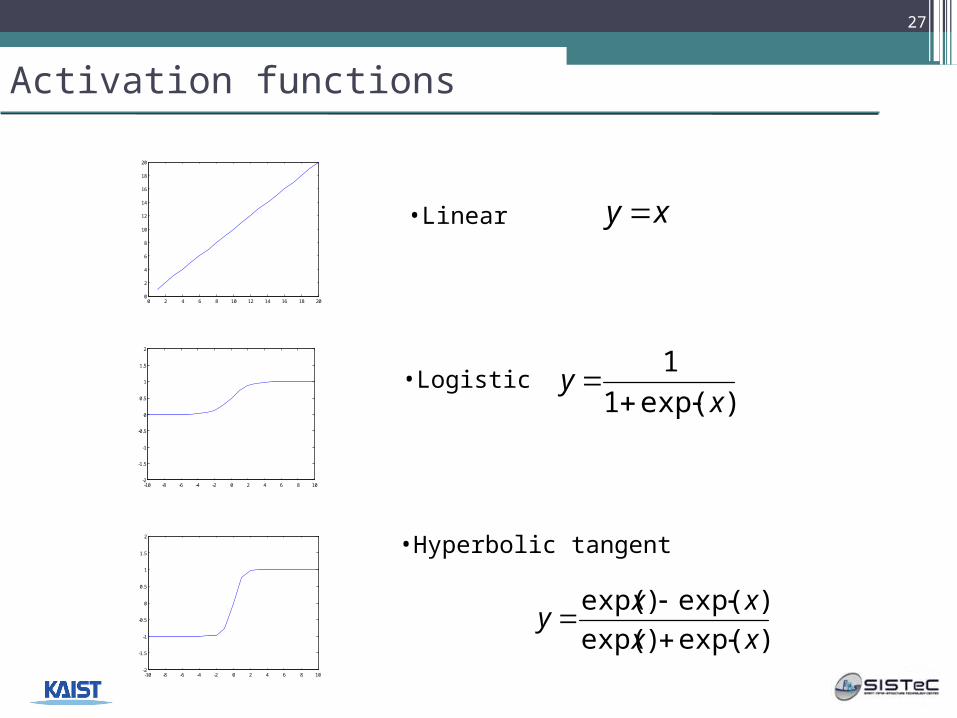
Activation functions
-10 -8 -6 -4 -2 0 2 4 6 8 10-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
-10 -8 -6 -4 -2 0 2 4 6 8 10-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
xy
0 2 4 6 8 10 12 14 16 18 200
2
4
6
8
10
12
14
16
18
20
•Linear
•Logistic
•Hyperbolic tangent
)exp(1
1
xy
)exp()exp(
)exp()exp(
xx
xxy
27
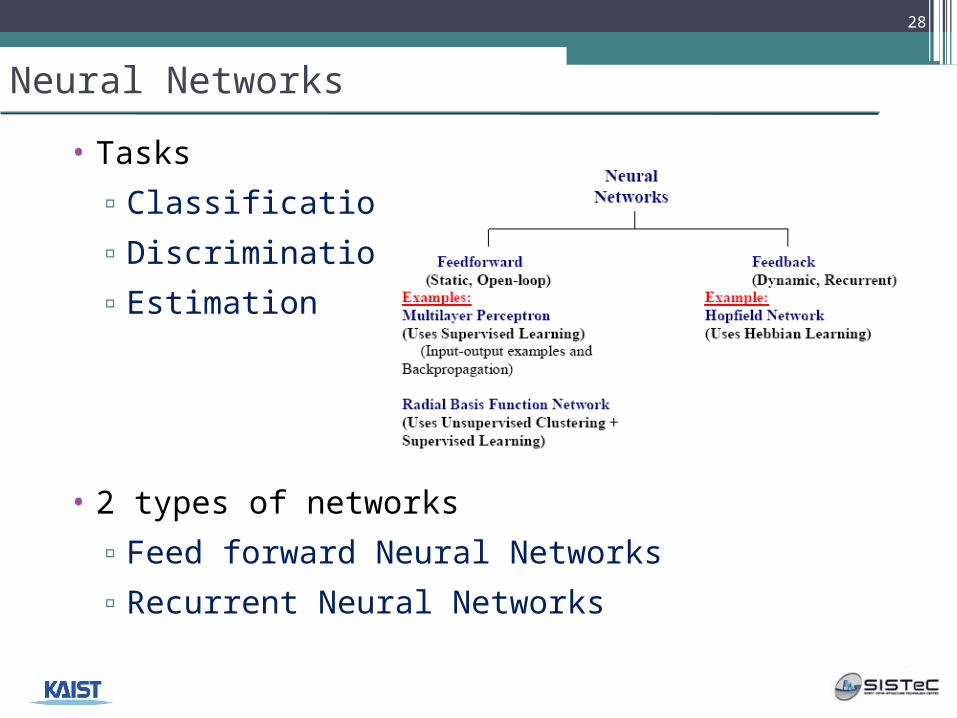
Neural Networks
• Tasks
▫Classification
▫Discrimination
▫Estimation
• 2 types of networks
▫Feed forward Neural Networks
▫Recurrent Neural Networks
28
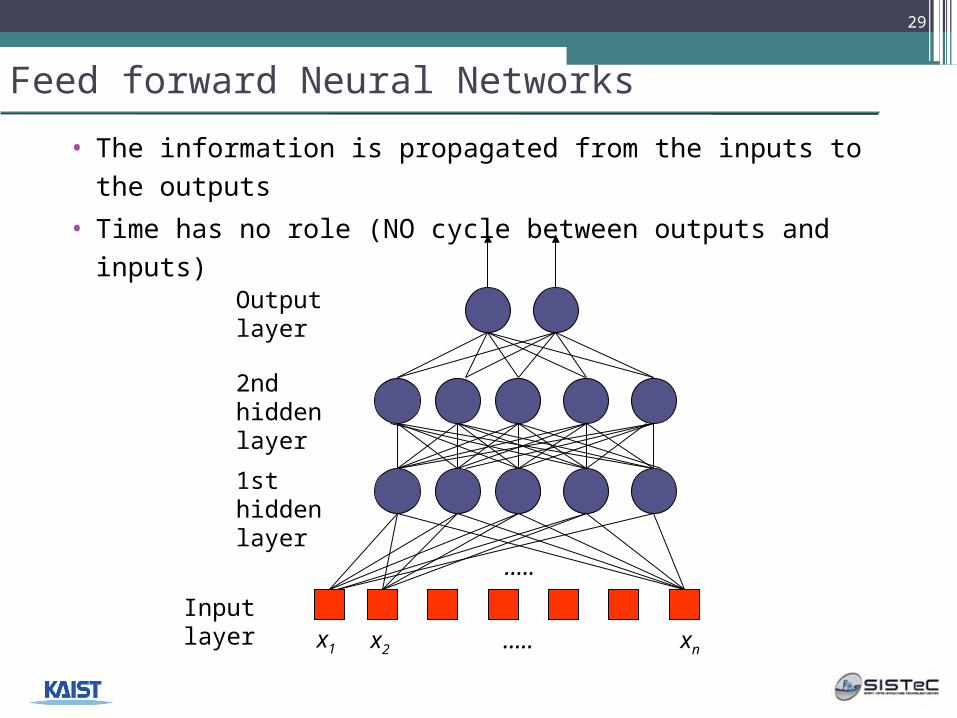
Feed forward Neural Networks
• The information is propagated from the inputs to the outputs
• Time has no role (NO cycle between outputs and inputs)
29
x1 x2 xn…..
1st hidden layer
2nd hiddenlayer
Output layer
Input layer
…..
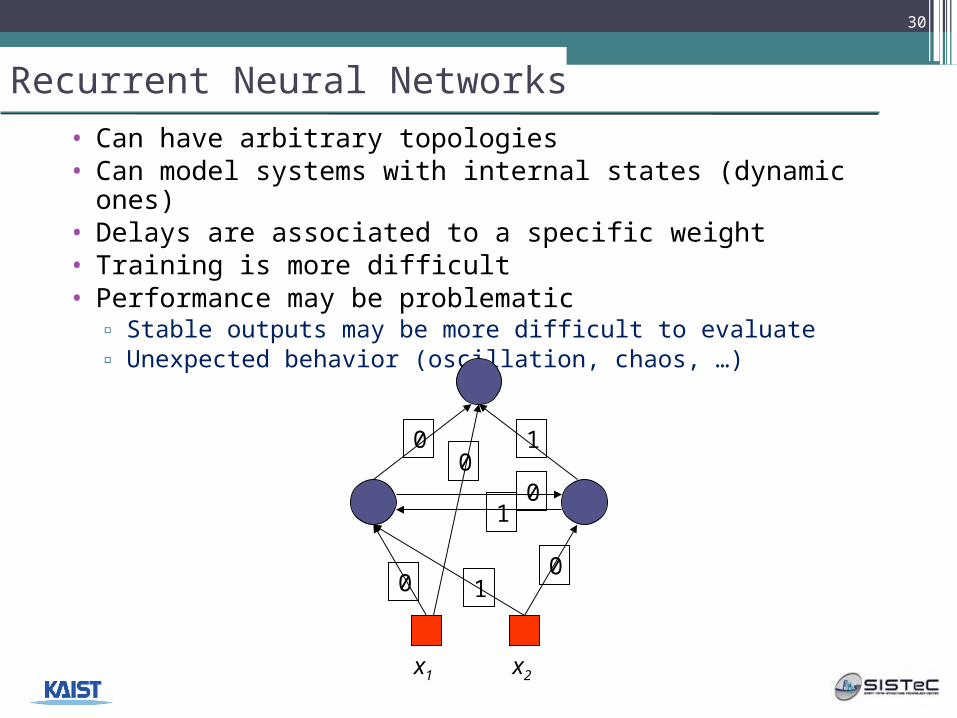
Recurrent Neural Networks• Can have arbitrary topologies• Can model systems with internal states (dynamic ones)• Delays are associated to a specific weight• Training is more difficult• Performance may be problematic
▫ Stable outputs may be more difficult to evaluate▫ Unexpected behavior (oscillation, chaos, …)
x1 x2
1
010
10
00
30
Learning
• The procedure that consists in estimating the parameters of neurons so that the whole network can perform a specific task
• 2 types of learning
▫ The supervised learning
▫ The unsupervised learning
• The Learning process (supervised)
▫ Present the network a number of inputs and their corresponding outputs
▫ See how closely the actual outputs match the desired ones
▫ Modify the parameters to better approximate the desired outputs
31
Supervised learning
• The desired response of the neural network in function of particular inputs is well known.
• A “Teacher” may provide examples and teach the neural network how to fulfill a certain task
32
Unsupervised learning
• Idea : group typical input data in function of resemblance criteria unknown a priori
• Data clustering
• No need of a teacher
▫The network finds itself the correlations between the data
▫Examples of such networks Kohonen feature maps: Competitive learning
33
Classical neural architectures
• Perceptron
• Multi-layer Perceptron
• Radial Basis Function (RBF)
• Kohonen features maps
• Other architectures
▫Shared weights neural networks
▫ART: Adaptive Resonance Theory
▫Cascading neural networks
34
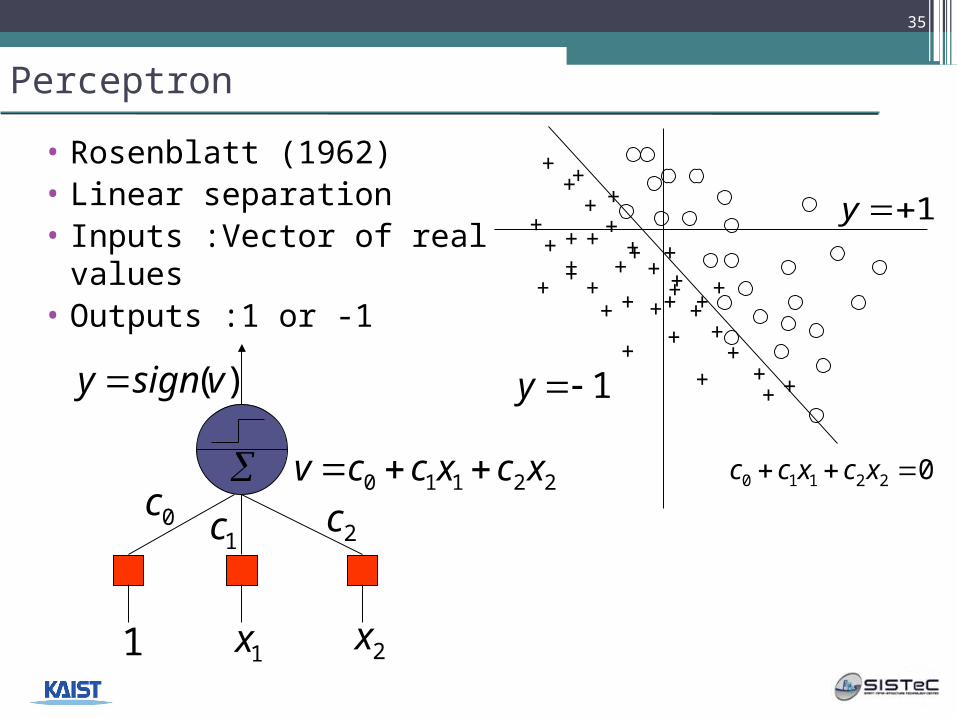
Perceptron
• Rosenblatt (1962)• Linear separation• Inputs :Vector of real
values• Outputs :1 or -1
022110 xcxcc
1y
+ +++
++
++
++ + +
++ +
+
+++
++
+
++
++
+++
++
+
+
+
+
+
1y
0c1c 2c
1x 2x1
22110 xcxccv
)(vsigny
35
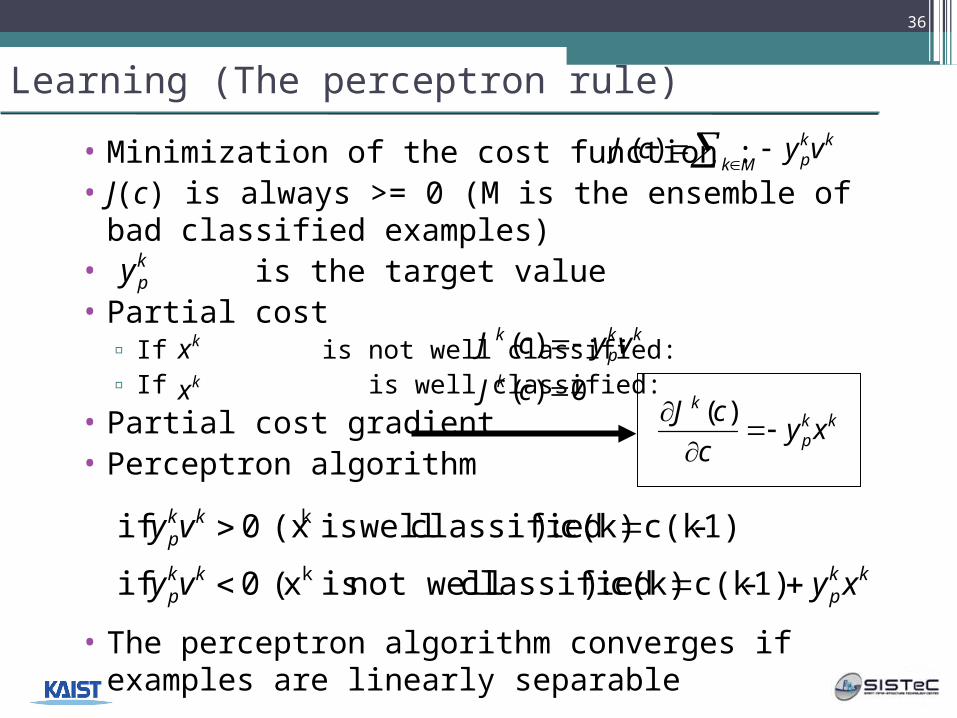
Learning (The perceptron rule)
Mk
kkpvycJ )(• Minimization of the cost function :
• J(c) is always >= 0 (M is the ensemble of bad classified examples)
• is the target value • Partial cost
▫ If is not well classified:▫ If is well classified:
• Partial cost gradient• Perceptron algorithm
• The perceptron algorithm converges if examples are linearly separable
kx
kpy
kkp
kkp
kkp
xyvy
vy
1)-c(kc(k) :)classified not well is x( 0 if
1)-c(kc(k) :)classified wellis (x 0 ifk
k
kx
kkp
k vycJ )(
0)( cJ k
kkp
k
xyc
cJ
)(
36
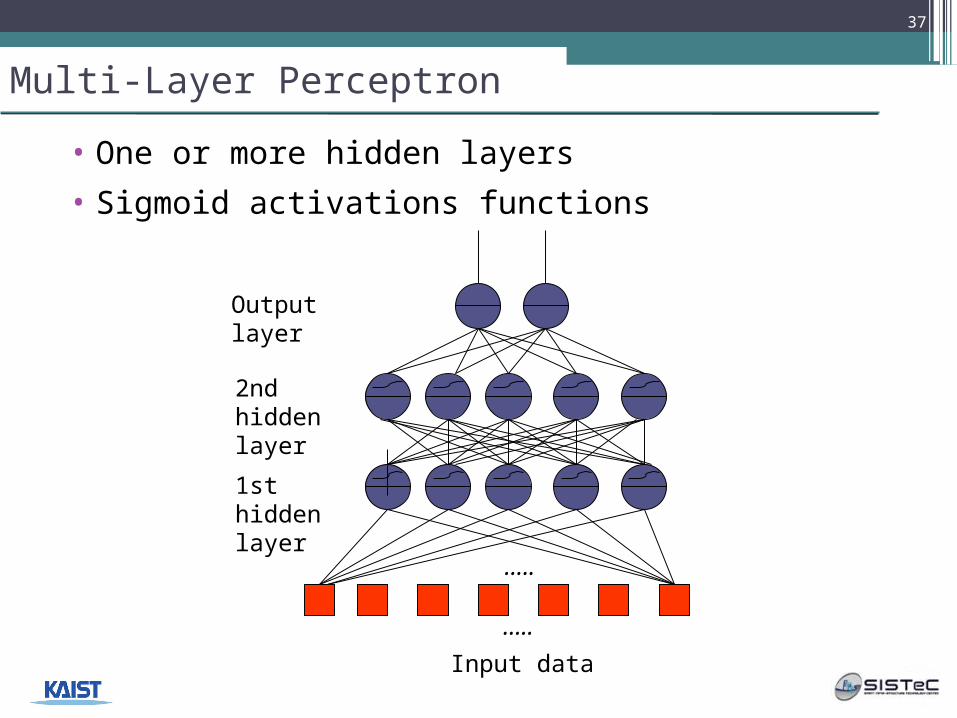
Multi-Layer Perceptron
• One or more hidden layers
• Sigmoid activations functions
1st hidden layer
2nd hiddenlayer
Output layer
Input data
37
…..
…..
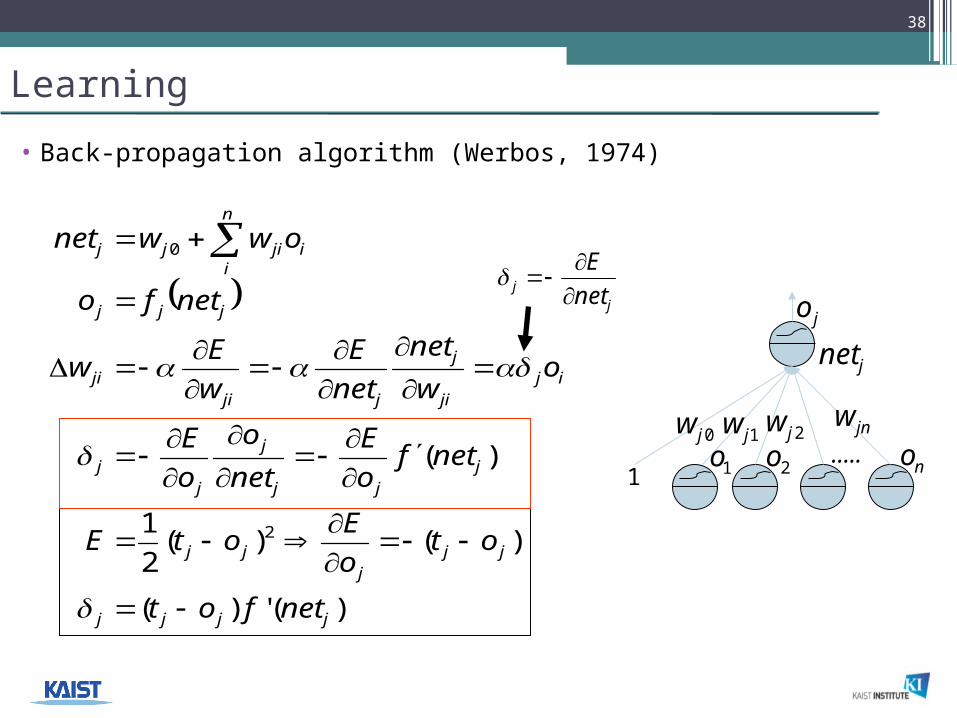
Learning
• Back-propagation algorithm (Werbos, 1974)
jj net
E
)(')(
)()(2
1
)(
2
0
jjjj
jjj
jj
jjj
j
jj
ijji
j
jjiji
jjj
n
iijijj
netfot
oto
EotE
netfo
E
net
o
o
E
ow
net
net
E
w
Ew
netfo
owwnet
38
jo
jnet
0jw2o no….
.
1jw 2jw jnw
1o1
)()1()(
)1()()()(
)('
twtwtw
twtottw
wnetf
wo
net
net
E
o
E
jijiji
jiijji
k kjkjjj
k k kjkjj
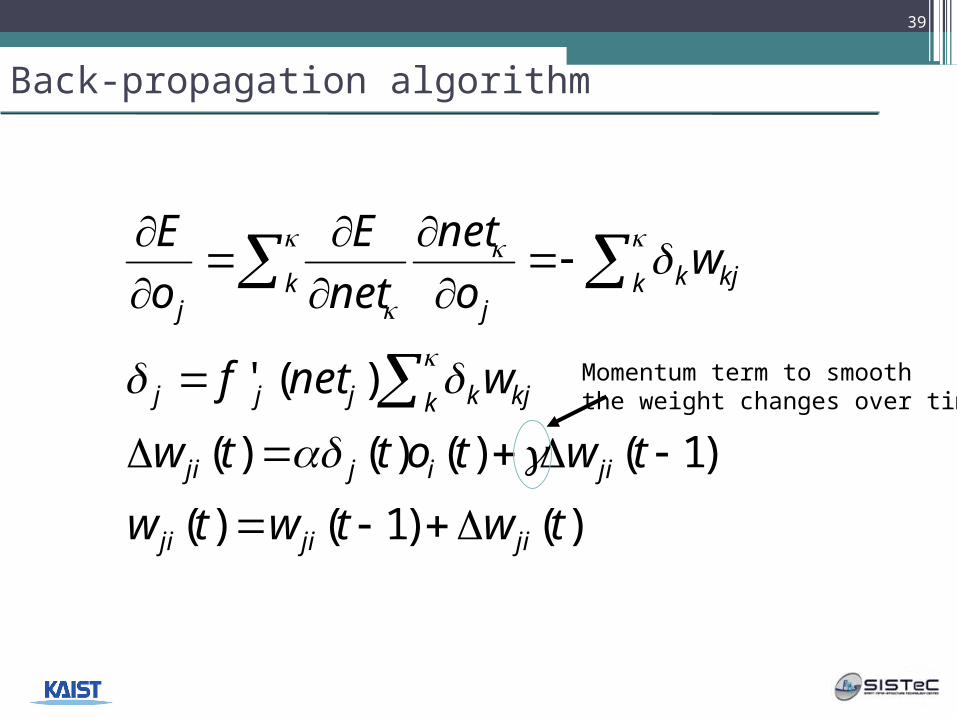
Momentum term to smooththe weight changes over time
Back-propagation algorithm
39
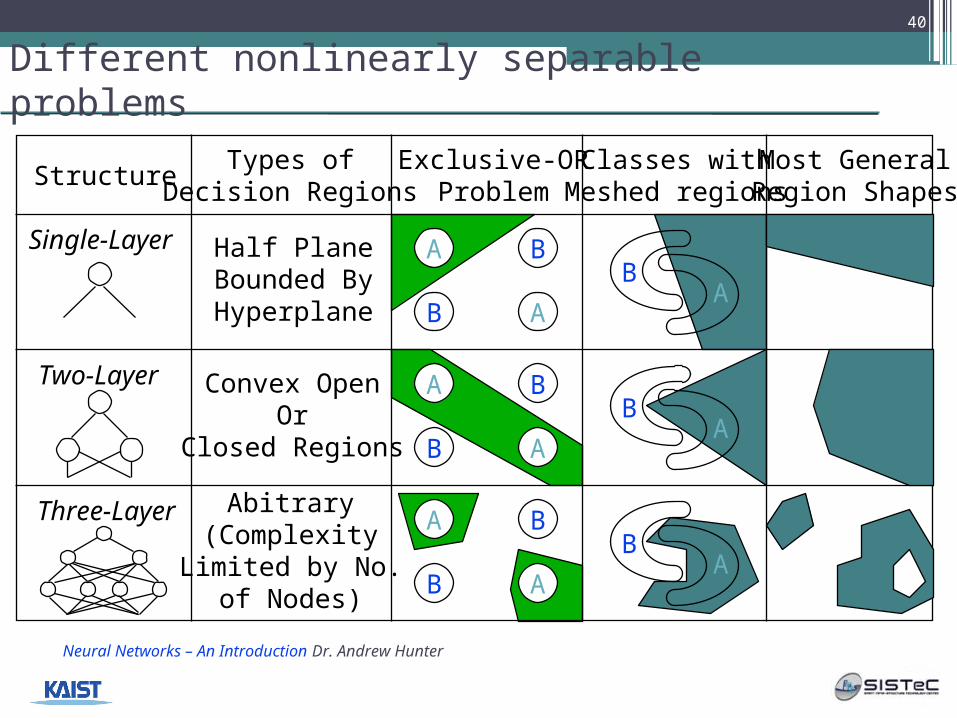
StructureTypes of
Decision RegionsExclusive-OR
ProblemClasses with
Meshed regionsMost General
Region Shapes
Single-Layer
Two-Layer
Three-Layer
Half PlaneBounded ByHyperplane
Convex OpenOr
Closed Regions
Abitrary(Complexity
Limited by No.of Nodes)
A
AB
B
A
AB
B
A
AB
B
BA
BA
BA
Different nonlinearly separable problems
Neural Networks – An Introduction Dr. Andrew Hunter
40
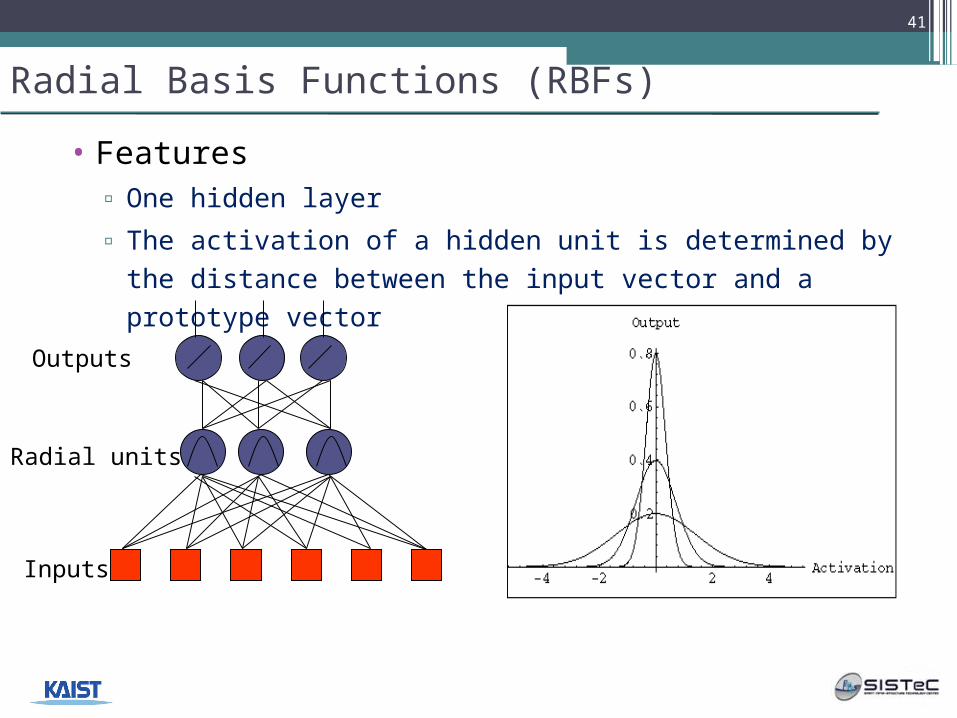
Radial Basis Functions (RBFs)
• Features▫ One hidden layer
▫ The activation of a hidden unit is determined by the distance between the input vector and a prototype vector
Radial units
Outputs
Inputs
41
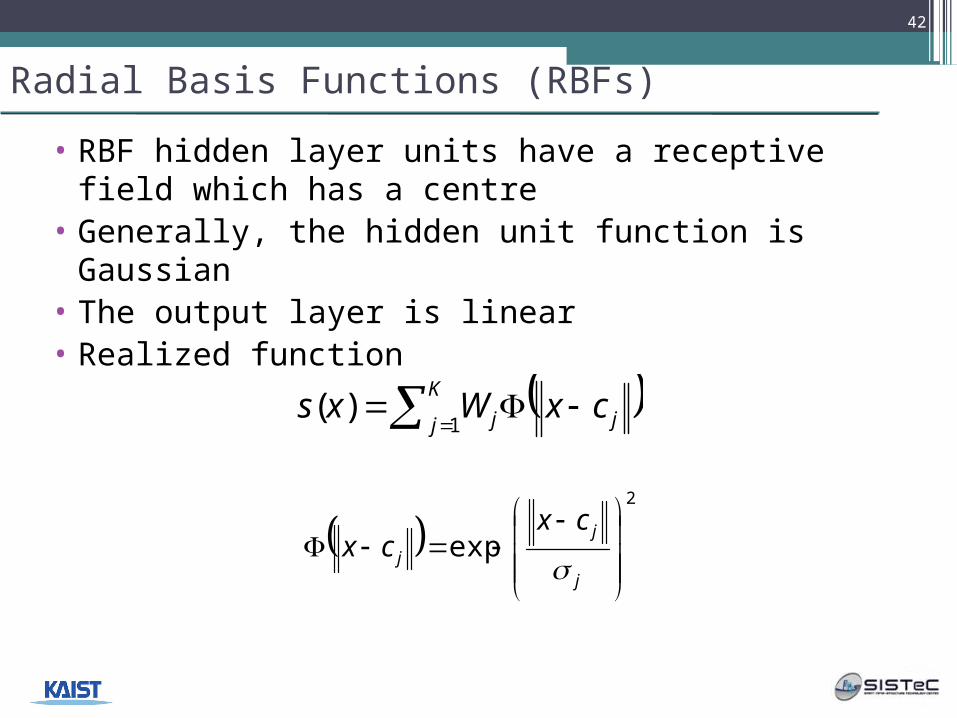
• RBF hidden layer units have a receptive field which has a centre
• Generally, the hidden unit function is Gaussian• The output layer is linear• Realized function
Radial Basis Functions (RBFs)
K
j jj cxWxs1
)(
2
exp
j
j
j
cxcx
42
Learning
•The training is performed by deciding on▫How many hidden nodes there should be
▫The centers and the sharpness of the Gaussians
•2 steps▫In the 1st stage, the input data set is used to
determine the parameters of the basis functions
▫In the 2nd stage, functions are kept fixed while the second layer weights are estimated (Simple BP algorithm like for MLPs)
43
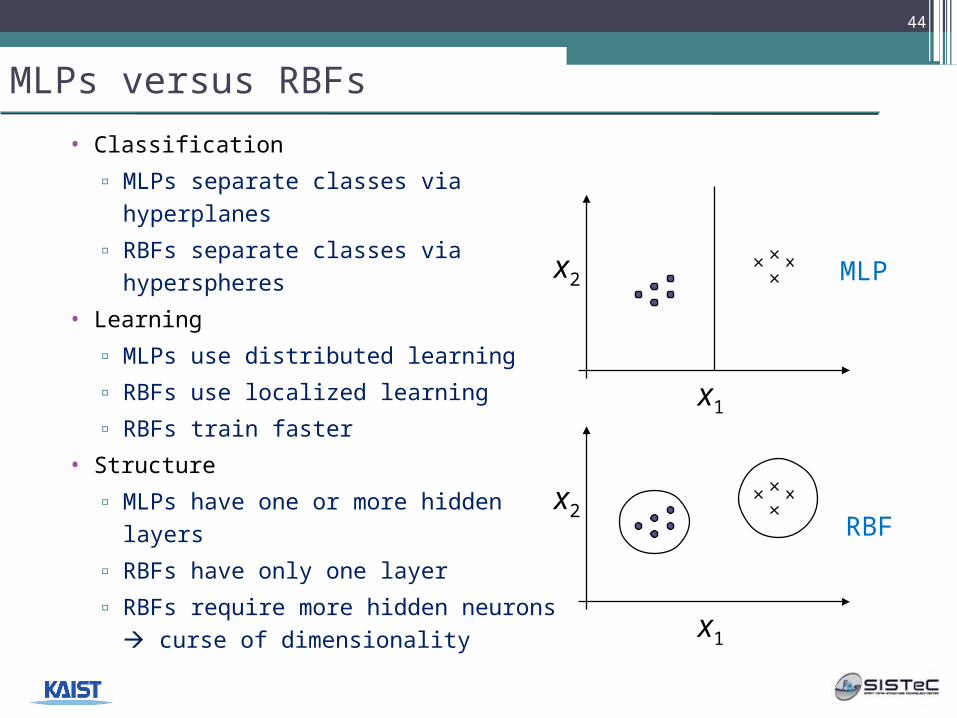
MLPs versus RBFs
• Classification
▫ MLPs separate classes via hyperplanes
▫ RBFs separate classes via hyperspheres
• Learning
▫ MLPs use distributed learning
▫ RBFs use localized learning
▫ RBFs train faster
• Structure
▫ MLPs have one or more hidden layers
▫ RBFs have only one layer
▫ RBFs require more hidden neurons curse of dimensionality
x2
x1
MLP
x2
x1
RBF
44
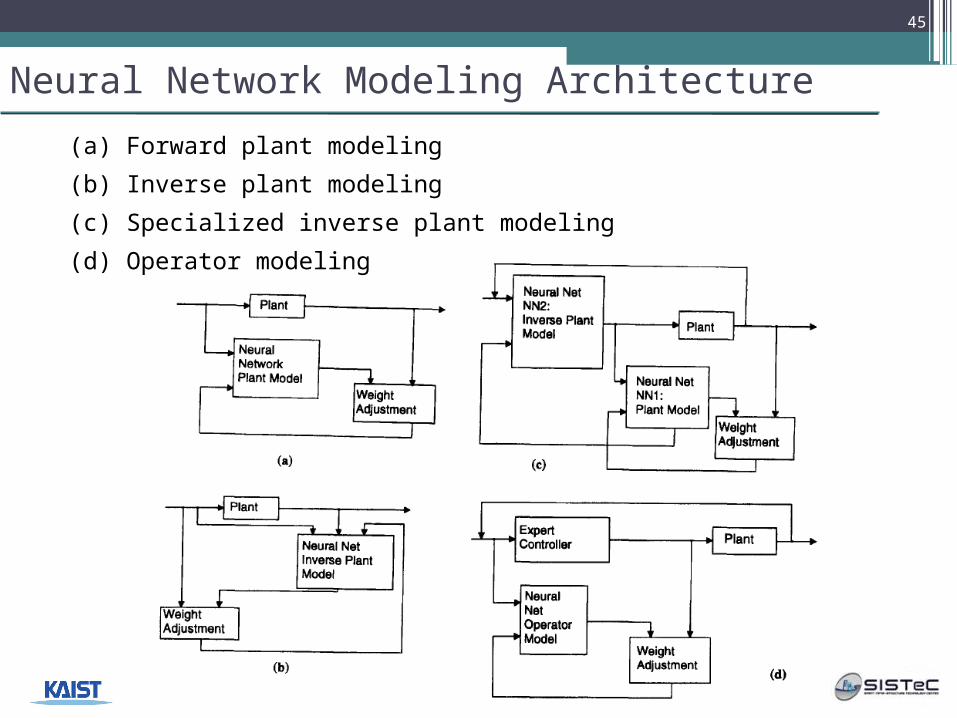
Neural Network Modeling Architecture
(a) Forward plant modeling
(b) Inverse plant modeling
(c) Specialized inverse plant modeling
(d) Operator modeling
45
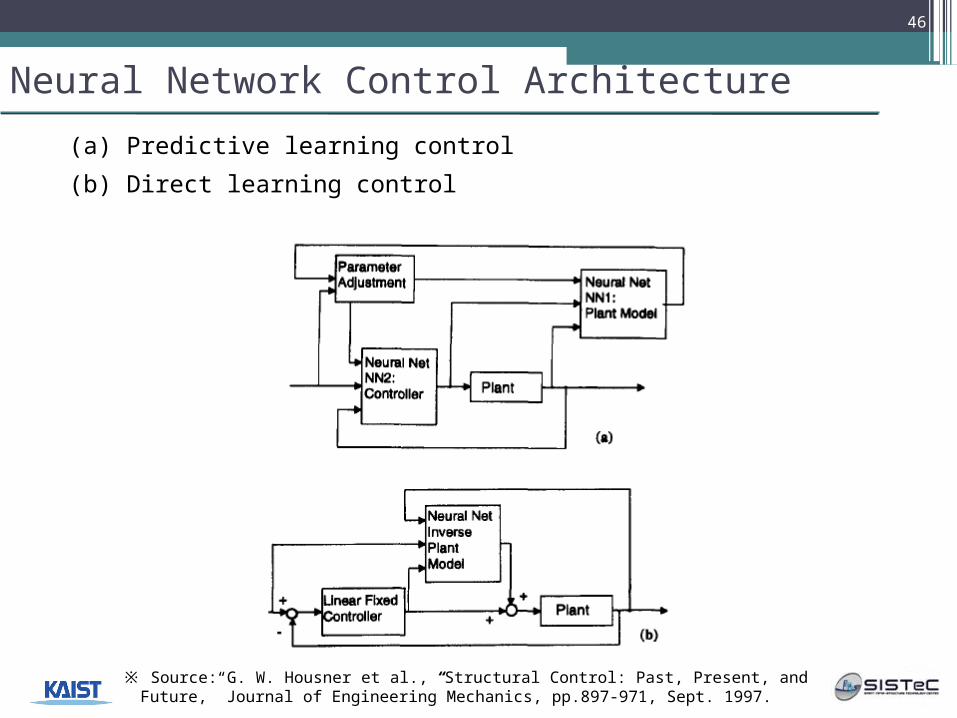
Neural Network Control Architecture
(a) Predictive learning control
(b) Direct learning control
46
※ Source: G. W. Housner et al., “Structural Control: Past, Present, and Future,” Journal of Engineering Mechanics, pp.897-971, Sept. 1997.
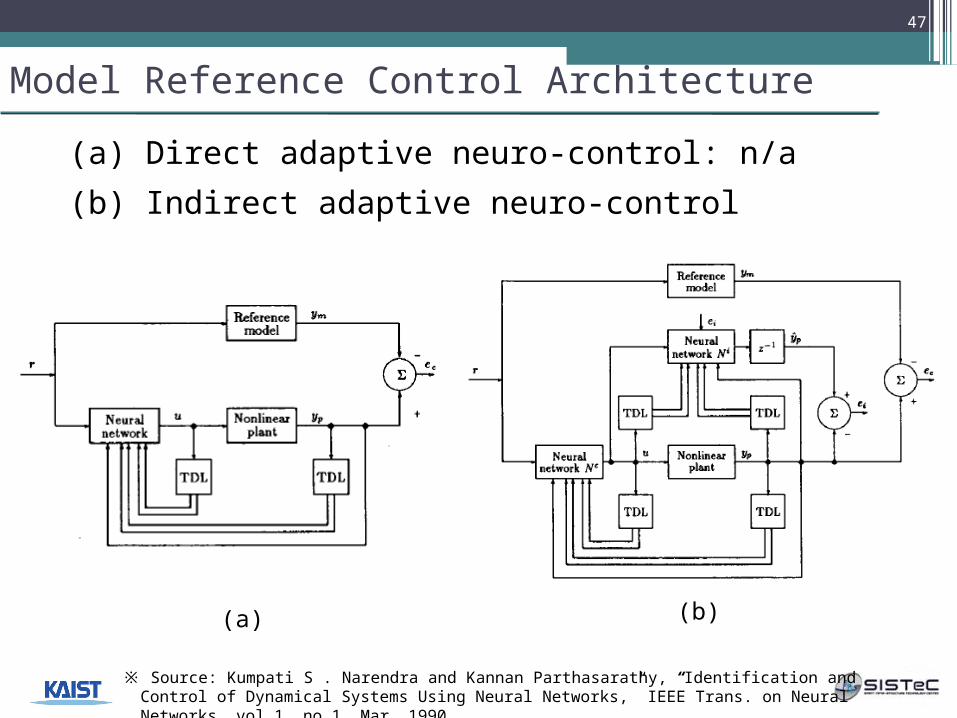
Model Reference Control Architecture
(a) Direct adaptive neuro-control: n/a
(b) Indirect adaptive neuro-control
47
(a) (b)
※ Source: Kumpati S . Narendra and Kannan Parthasarathy, “Identification and Control of Dynamical Systems Using Neural Networks,” IEEE Trans. on Neural Networks, vol.1, no.1, Mar. 1990.
48
Definition: Fuzziness
• Fuzziness: Non-statistical imprecision and vagueness in information and data.
• Fuzzy Sets model the properties of imprecision, approximation or vagueness.
• Fuzzy Membership Values reflect the membership grades in a set.
• Fuzzy Logic is the logic of approximate reasoning. It is a generalization of conventional logic.
49
Fuzzy Logic Behavioral Motivations
• FL analogous to uncertainty in human experiences (“Stop the car pretty soon.”)
• Fuzziness is associated with non-statistical uncertainty
• FL thus is reflected at the behavioral level of the organism
• Fuzziness is not resolved by observation or measurement
50
Application Areas: Fuzzy Logic
• Control systems
▫Vehicles
▫Home appliances
▫Structure
• Expert systems
▫Industrial processes
▫Diagnostics
▫Finance
▫Robotics and manufacturing
51
Fuzzy Sets
• Proposed by Ladeh Zadeh in 1965
▫"Fuzzy sets," Information and Control, vol. 8, pp. 338--353, 1965.
• A generalization of set theory that allows partial membership in a set.
▫Membership is a real number with a range [0, 1]
▫Membership functions are commonly triangular or Gaussian because ease of computation.
▫Utility comes from overlapping membership functions – a value can belong to more than one set
52
52
※Source: Dr. Stephen Paul Linder
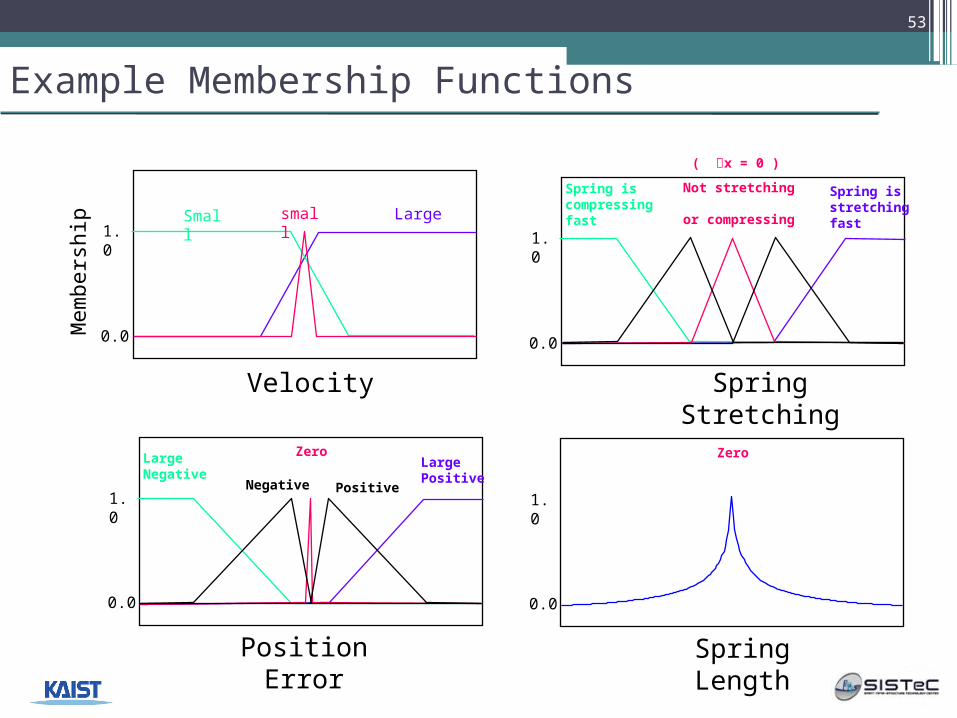
Example Membership Functions
53
1.0
0.0
Spring Stretching
small
LargeSmall
Mem
bers
hi
p
1.0
0.0
Not stretching or compressing
Spring is stretching fast
Spring is compressing fast
Position Error
1.0
ZeroLarge Negative
Velocity
Large Positive Negative Positive
0.0
( x = 0 )
Spring Length
1.0
Zero
0.0
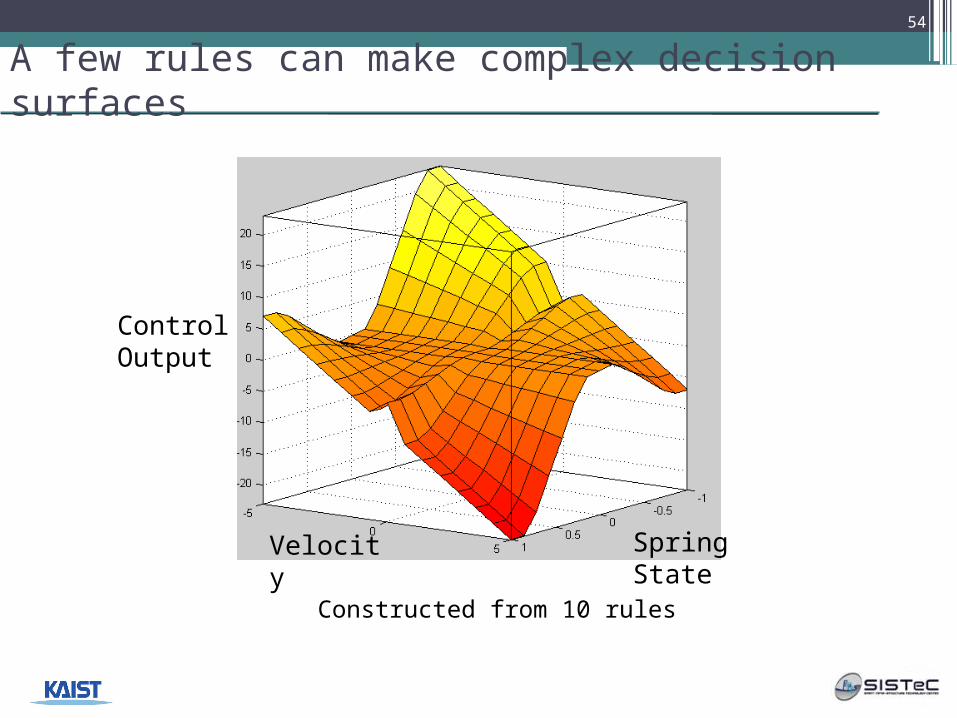
A few rules can make complex decision surfaces
54
Velocity Spring State
Control Output
Constructed from 10 rules
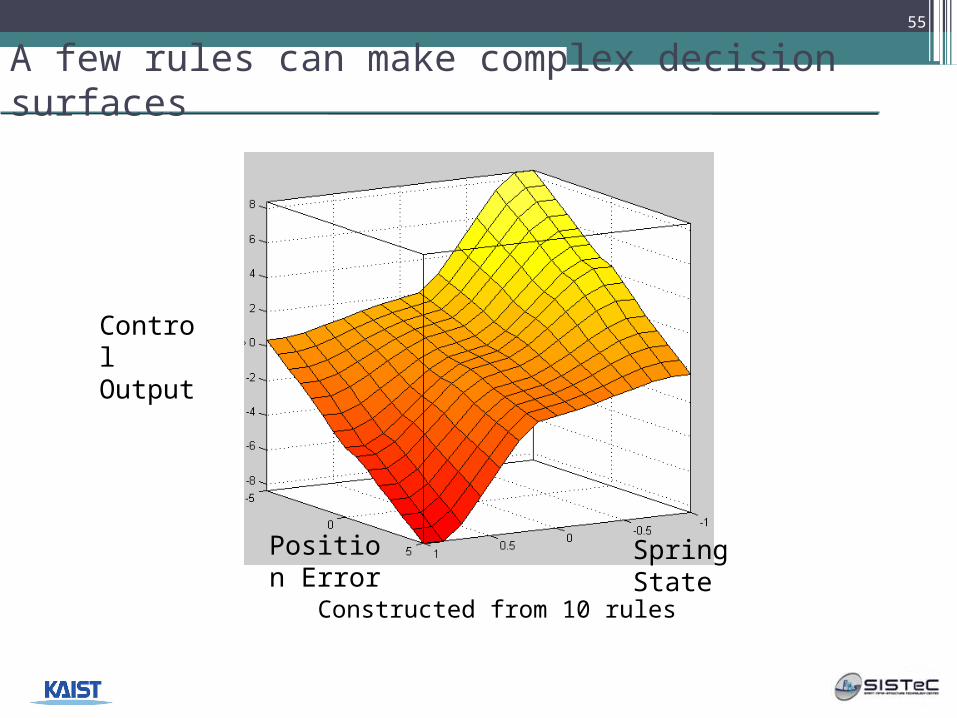
A few rules can make complex decision surfaces
55
Control Output
Position Error
Spring State
Constructed from 10 rules
56
Fuzzy vs. Probabilistic Reasoning
• Probabilistic Reasoning
▫“There is an 80% chance that Jane is old”
▫Jane is either old or not old (the law of the excluded middle).
• Fuzzy Reasoning
▫“Jane's degree of membership within the set of old people is 0.80.”
▫Jane is like an old person, but could also have some characteristics of a young person.
56
※Source: Dr. Stephen Paul Linder
Why Fuzzy?
• Precision is not truth.— Henri Matisse
• So far as the laws of mathematics refer to reality, they are not certain. And so far as they are certain, they do not refer to reality. — Albert Einstein
• As complexity rises, precise statements lose meaning and meaningful statements lose precision. — Lotfi Zadeh
57
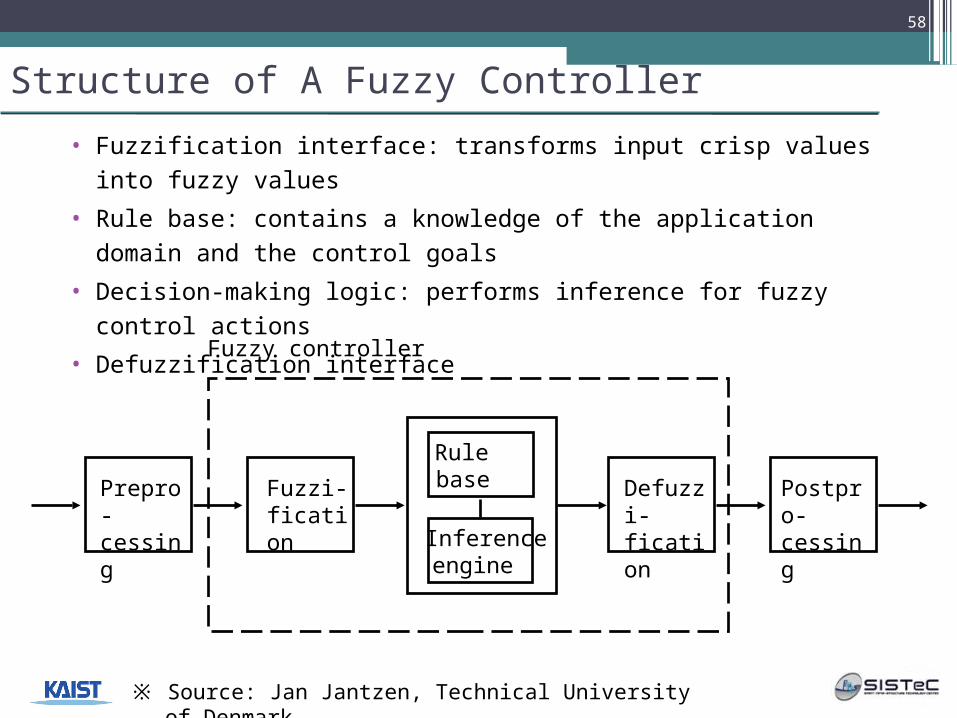
Structure of A Fuzzy Controller
• Fuzzification interface: transforms input crisp values into fuzzy values
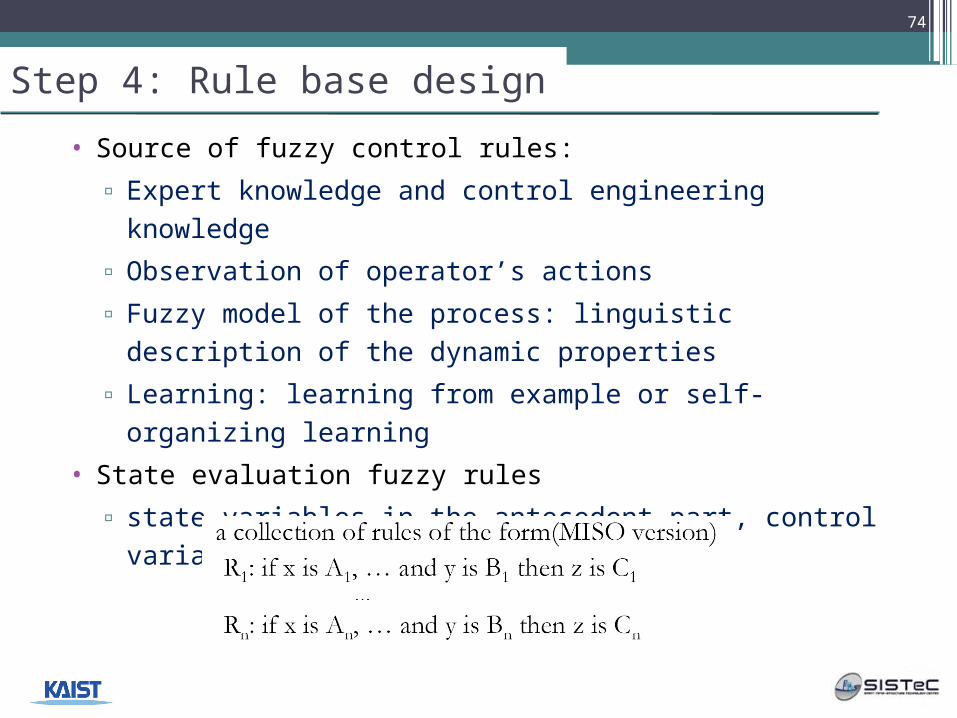
• Rule base: contains a knowledge of the application domain and the control goals
• Decision-making logic: performs inference for fuzzy control actions
• Defuzzification interfaceFuzzy controller
Inferenceengine
Rulebase Defuzzi-
ficationPostpro-cessing
Fuzzi-fication
Prepro-cessing
58
※ Source: Jan Jantzen, Technical University of Denmark
59
Fuzzy Reasoning
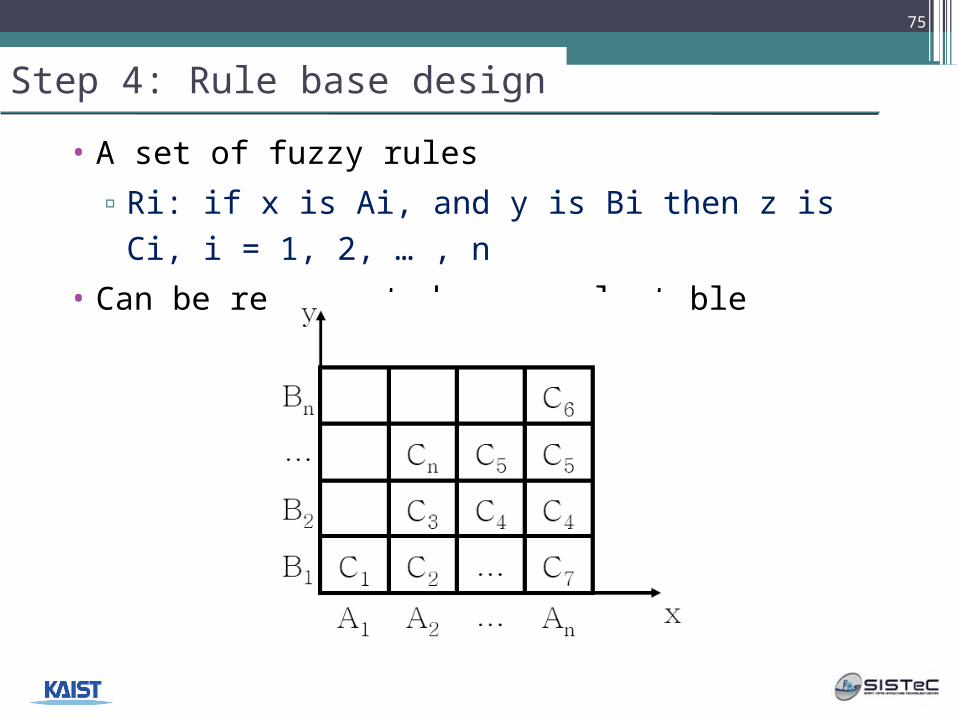
• Fuzzy Rules:
If x is A1 and y is B1 then z is C1
If x is A2 and y is B2 then z is C2
▫x and y are inputs, z is an output
▫Ai, Bi, and Ci are fuzzy sets
• Input data: x is A’, y is B’
▫A’ and B’ are also fuzzy sets
• Question: z is ?
60
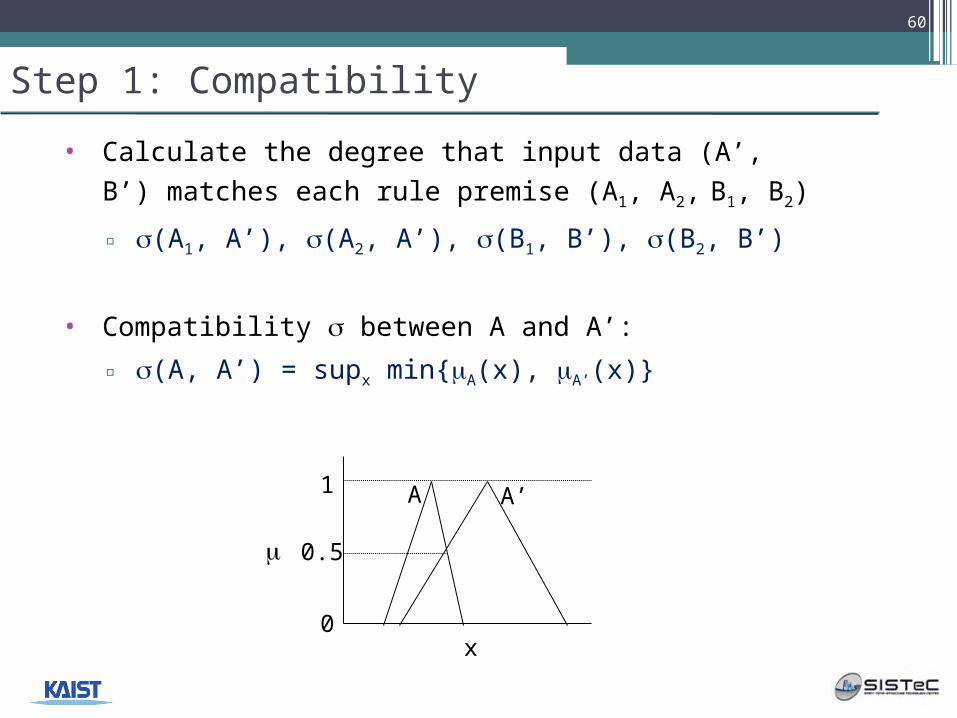
Step 1: Compatibility
• Calculate the degree that input data (A’, B’)
matches each rule premise (A1, A2, B1, B2)
▫ (A1, A’), (A2, A’), (B1, B’), (B2, B’)
• Compatibility between A and A’:
▫ (A, A’) = supx min{A(x), A’(x)}
x
0.5
1
A’
0
A
61
Step 2: Combine Compatibilities
• Combine the degree of matching for the inputs
▫ for “and”, usually take min
▫ for “or”, usually take max
▫ min{(A1, A’), (B1, B’)}
▫ min{(A2, A’), (B2, B’)}
x
0.5
1
A’
0y
0.3
1
B’
0
A B
0.3
62
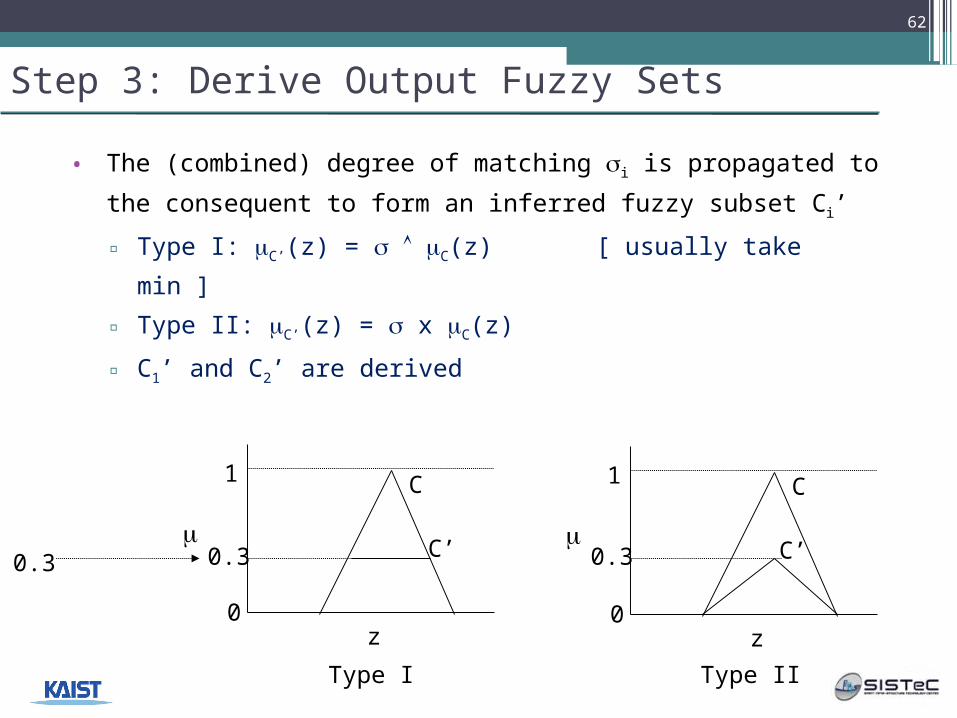
Step 3: Derive Output Fuzzy Sets
• The (combined) degree of matching i is propagated to
the consequent to form an inferred fuzzy subset Ci’
▫ Type I: C’(z) = C(z) [ usually take min ]
▫ Type II: C’(z) = x C(z)
▫ C1’ and C2’ are derived
z
1
C
0.3
0
C’
z
1
C
0.3
0
C’0.3
Type I Type II
63
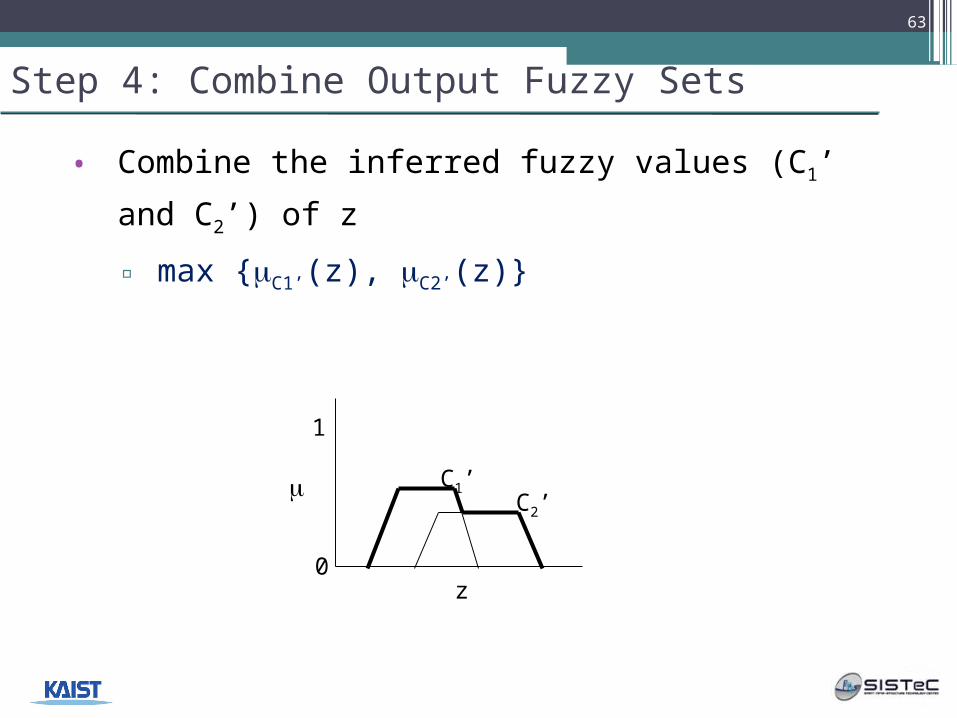
Step 4: Combine Output Fuzzy Sets
• Combine the inferred fuzzy values (C1’ and C2’)
of z
▫ max {C1’(z), C2’(z)}
z
1
0
C2’C1’
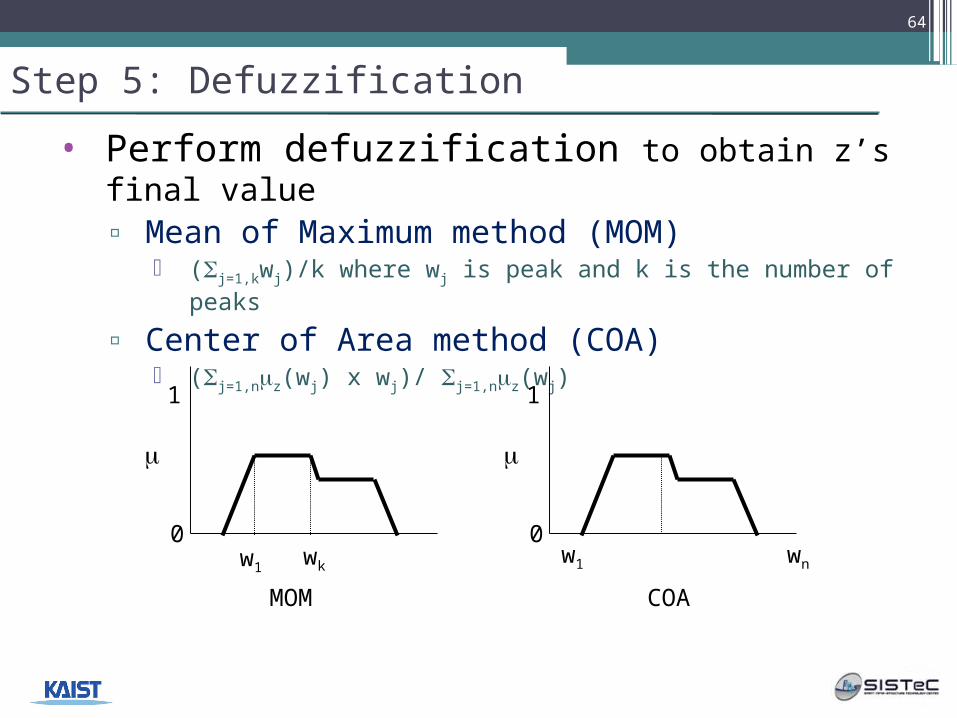
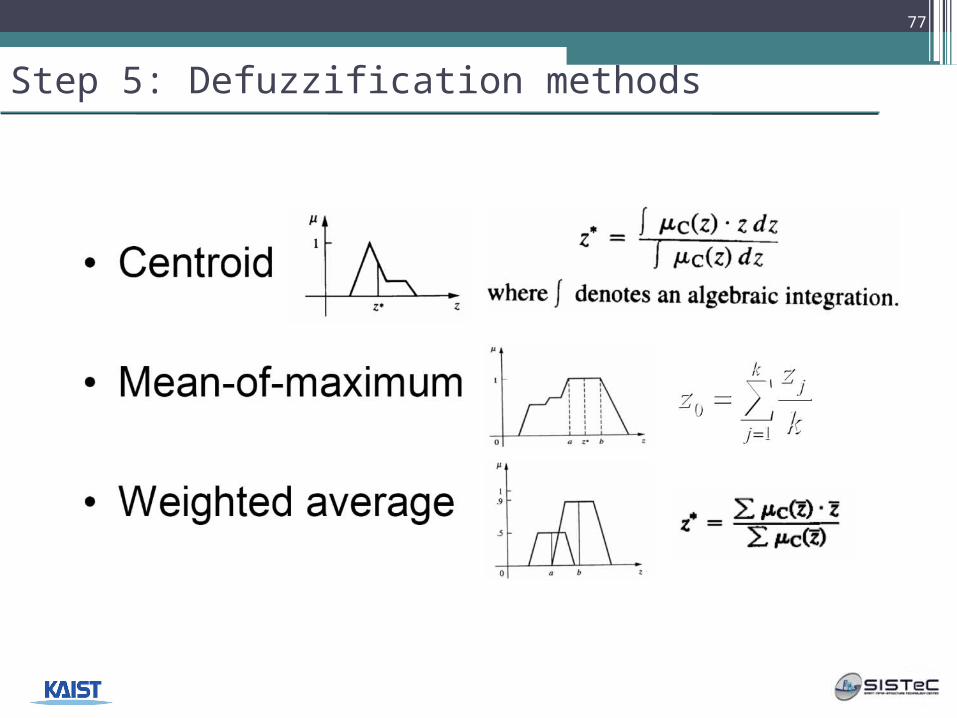
Step 5: Defuzzification
• Perform defuzzification to obtain z’s final value▫ Mean of Maximum method (MOM)
(j=1,kwj)/k where wj is peak and k is the number of peaks
▫ Center of Area method (COA) (j=1,nz(wj) x wj)/ j=1,nz(wj)
64
w1
1
0wk
MOM
1
0
COA
w1 wn
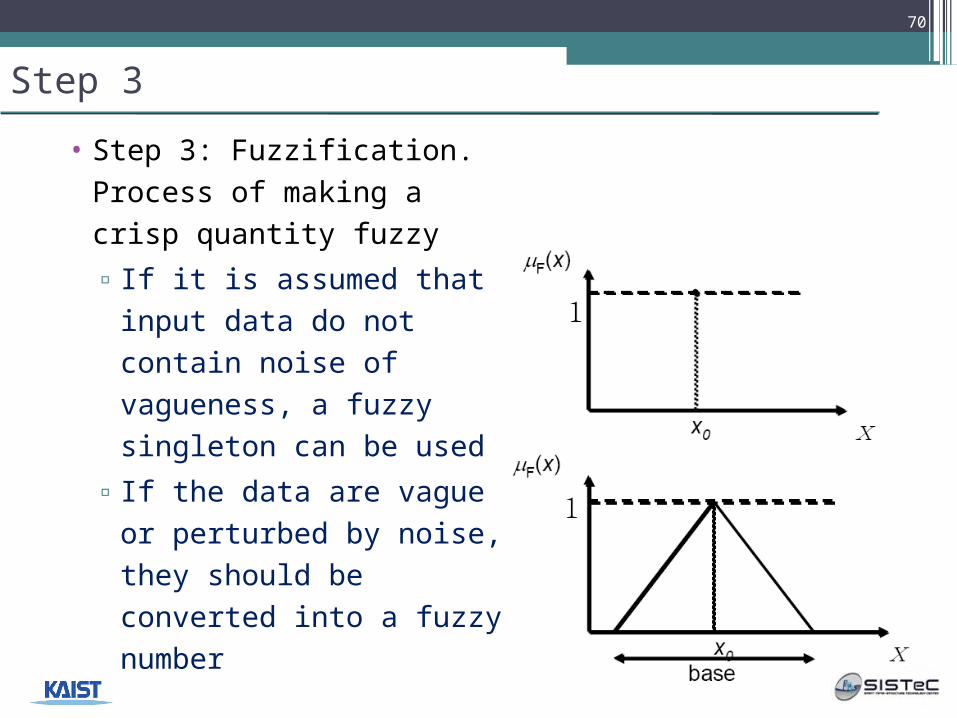
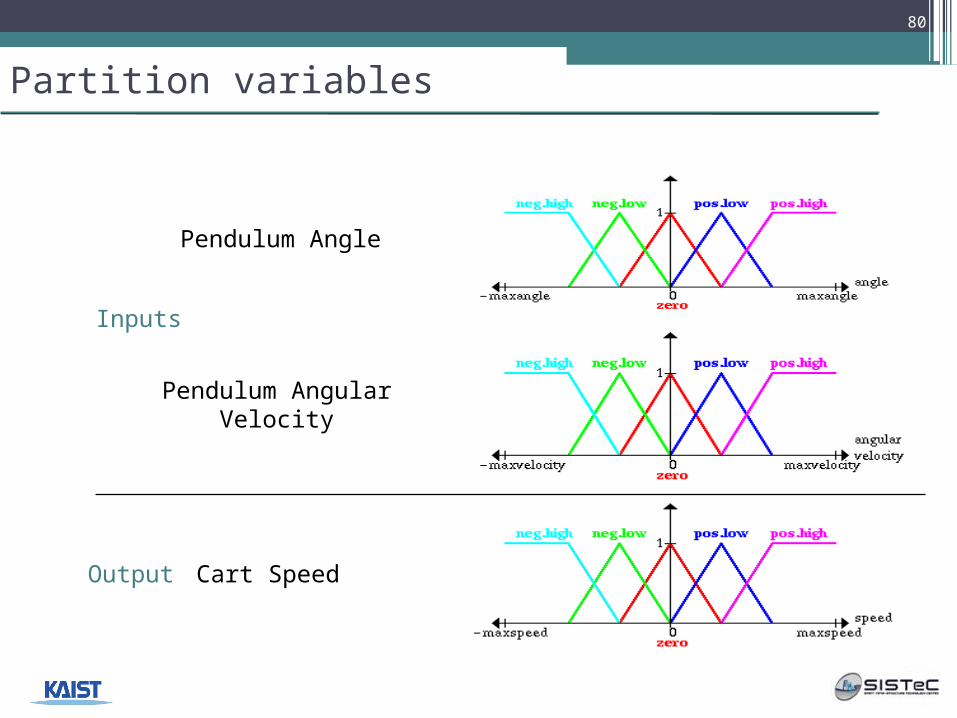
Fuzzy Controller Design: Step 1
• Step 1: Choice of state and control variables
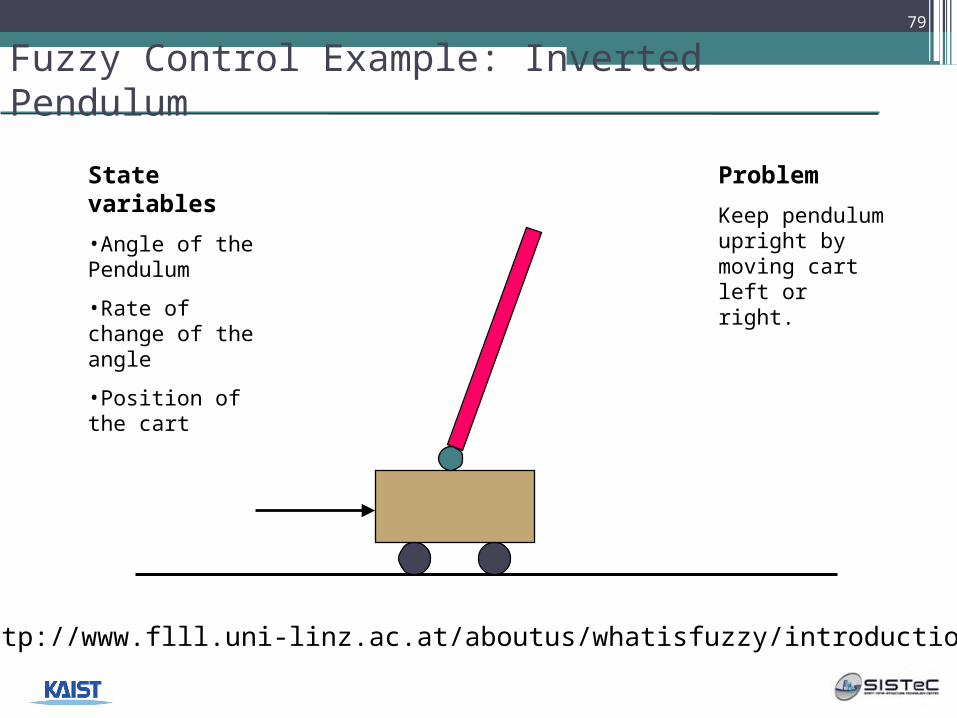
• State variables
▫input variables of the fuzzy control system
▫state, state error, state error deviation, and state error integral are often used
• Control variables
▫output variables of the fuzzy control system
▫selection of the variables depends on expert knowledge on the process
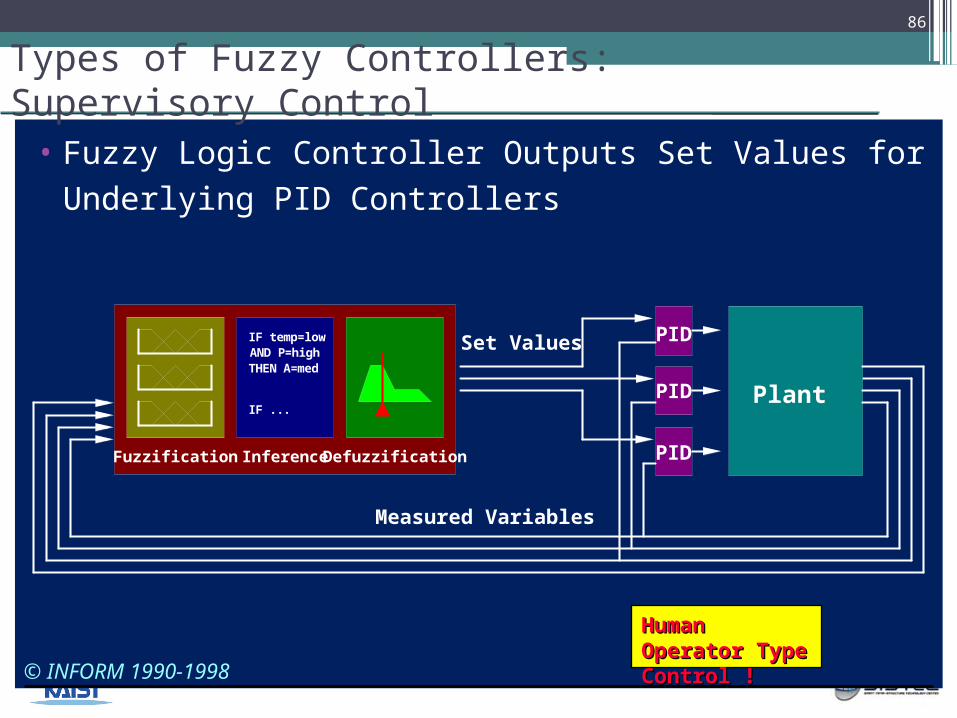
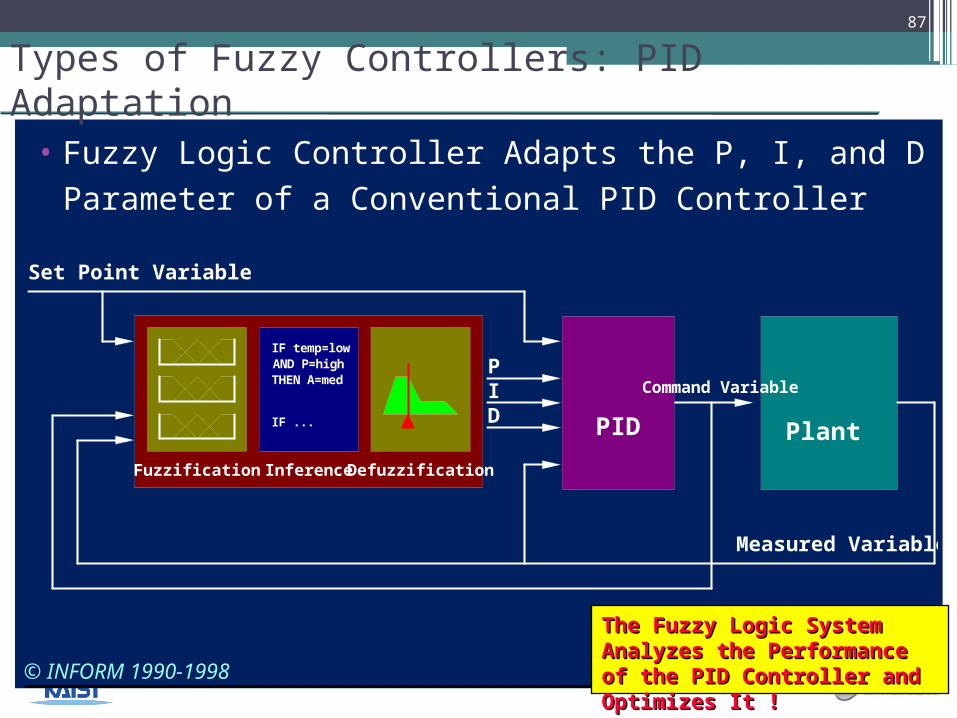
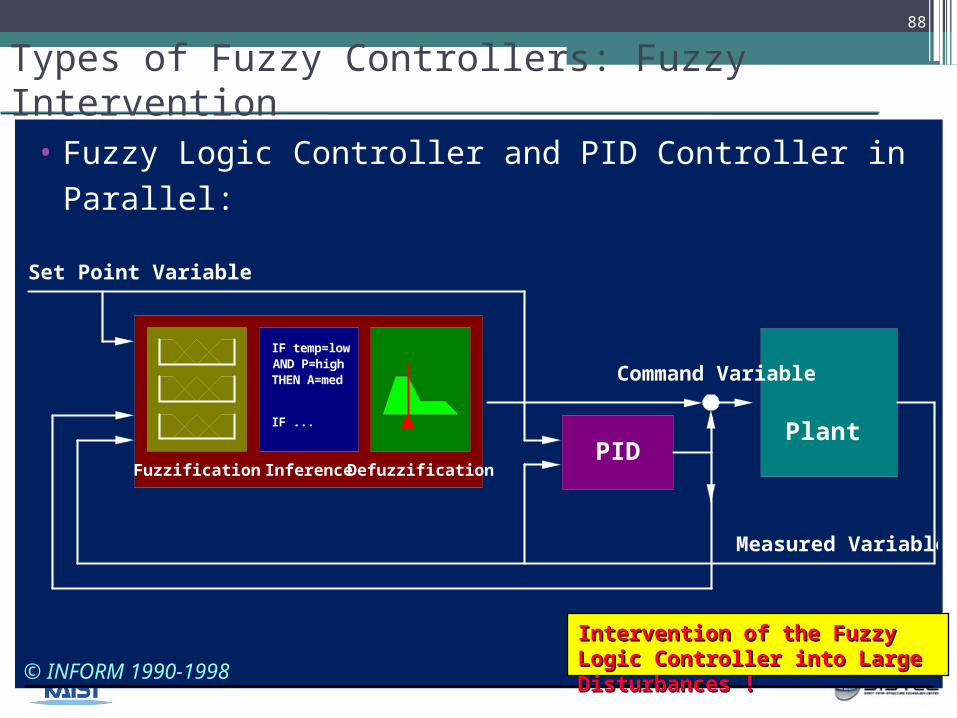
• Fuzzy Logic Controller Adapts the P, I, and D Parameter of a Conventional PID Controller
Fuzzification Inference Defuzzification
IF temp=lowAND P=highTHEN A=med
IF ...
P
Measured Variable
PlantPID
ID
Set Point Variable
Command Variable
The Fuzzy Logic System The Fuzzy Logic System Analyzes the Performance of the Analyzes the Performance of the PID Controller and Optimizes It !PID Controller and Optimizes It !
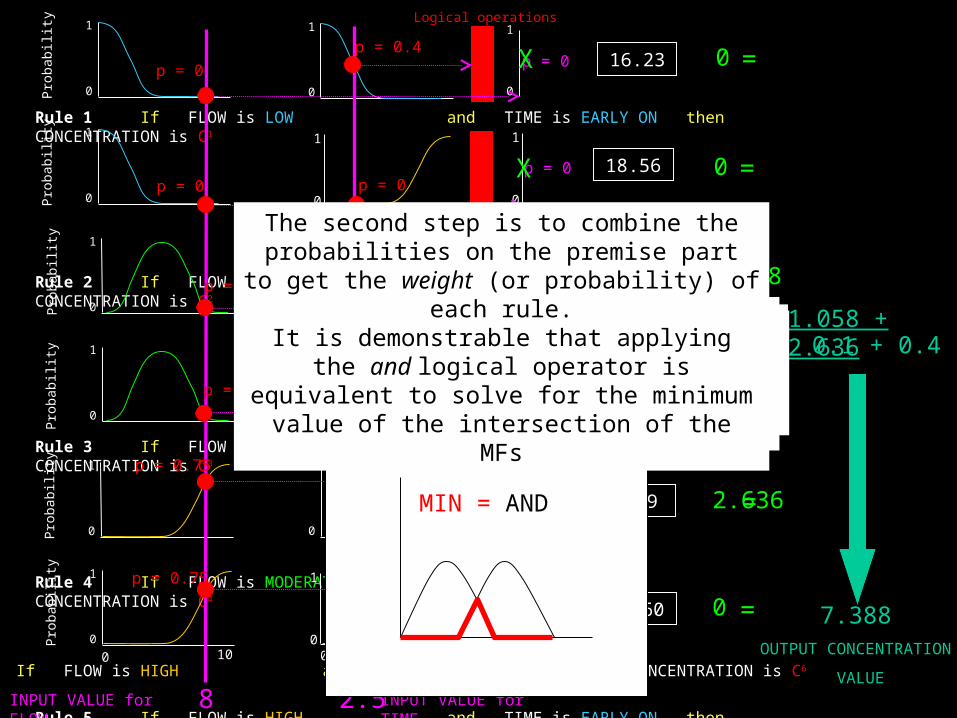
Rule 1 If FLOW is LOW and TIME is EARLY ON then CONCENTRATION is C1
Rule 2 If FLOW is LOW and TIME is LATER ON then CONCENTRATION is C2
Rule 3 If FLOW is MODERATE and TIME is EARLY ON then CONCENTRATION is C3
Rule 4 If FLOW is MODERATE and TIME is LATER ON then CONCENTRATION is C4
Rule 5 If FLOW is HIGH and TIME is EARLY ON then CONCENTRATION is C5
0
1
Pro
bab
ility
0
1
0
1
Pro
bab
ility
0
1
0
1
0
1
0
1
0
1
0
1
Pro
bab
ility
0
1
Pro
bab
ility
0
1
Pro
bab
ility
0
1
Pro
bab
ility
0 10 0 10Rule 6 If FLOW is HIGH and TIME is LATER ON then CONCENTRATION is C6
0
1
0
1
0
1
0
1
0
1
0
1
16.23
18.56
10.58
16.13
6.59
10.60
Logical operations
p = 0
p = 0
p= 0.1
p = 0
p= 0.4
p = 0
1.058 + 2.6360.1 + 0.4
7.388OUTPUT CONCENTRATION
VALUE
8 2.5INPUT VALUE for FLOW
p = 0
p = 0 p = 0
p = 0
p = 0
p = 0.4
p = 0.1
p = 0.1
p = 0.4
p = 0.75
p = 0.75
p = 0.4
INPUT VALUE for TIME
X =
X =
X =
X =
X =
X =
0
0
1.058
0
2.636
0
Given an input, the first step to solve the FIS is the fuzzyfication of inputs, i.e. to obtain the probability
of each linguistic value in each rule.
The six rules governing the Fuzzy Inference System are represented with a graphical representation of the
MFs that apply in each rule.
The last step is the defuzzyfication procedure, when the consequents are aggregated (weighted mean) to
obtain a crisp output
The third step is to calculate the consequent of each rule depending on their weight (or probability)
MIN = AND
The second step is to combine the probabilities on the premise part to get the weight (or probability) of
each rule.It is demonstrable that applying the and logical
operator is equivalent to solve for the minimum value of the intersection of the MFs
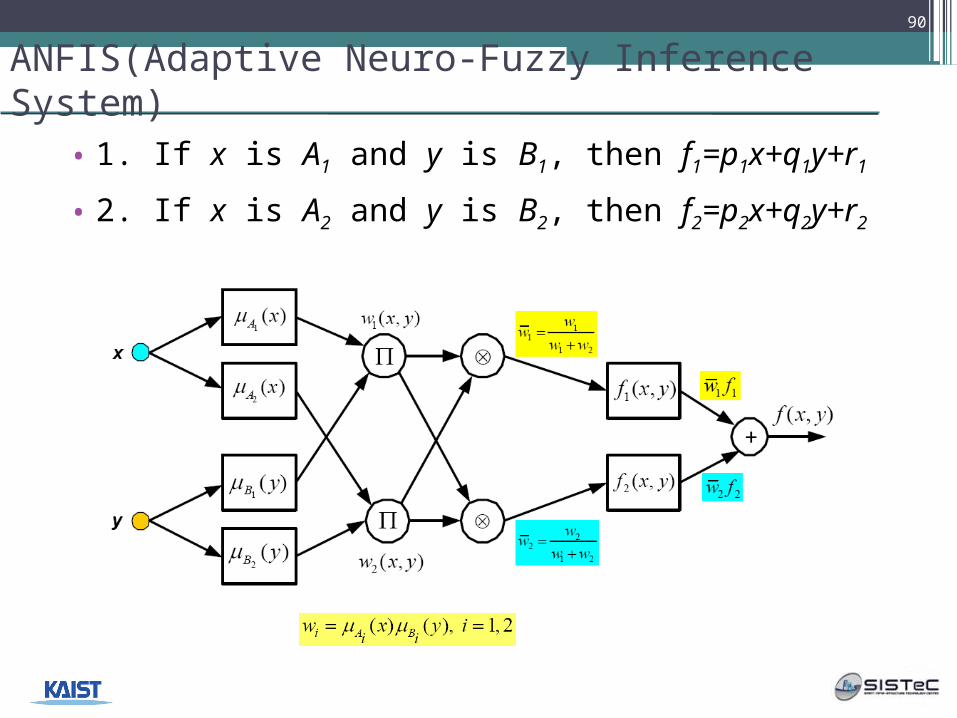
ANFIS(Adaptive Neuro-Fuzzy Inference System)
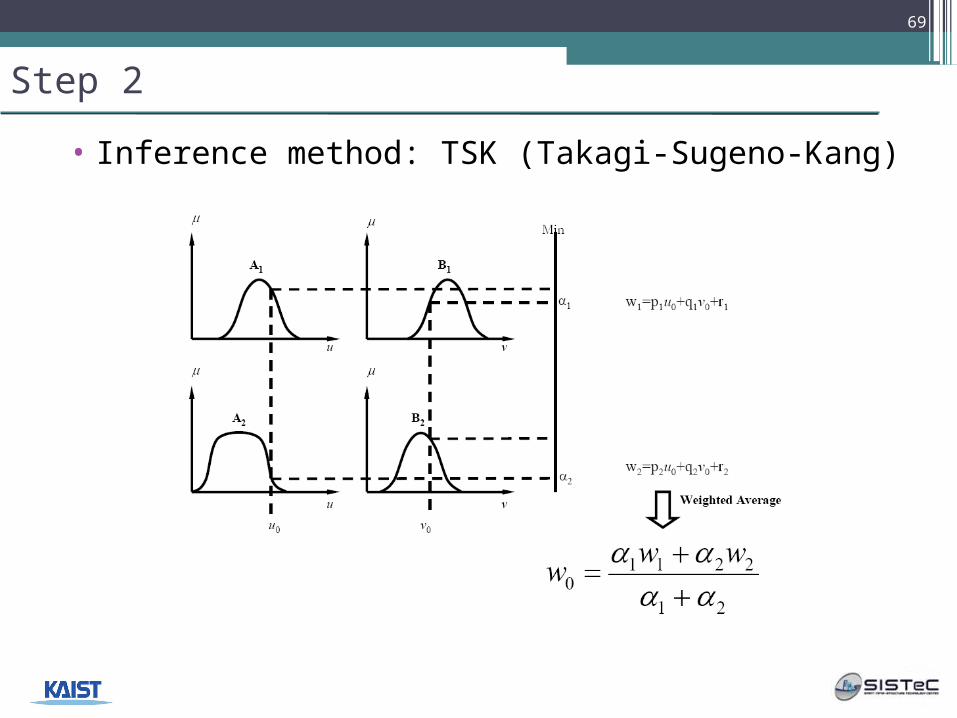
• 1. If x is A1 and y is B1, then f1=p1x+q1y+r1
• 2. If x is A2 and y is B2, then f2=p2x+q2y+r2
90
+
ANFIS Learning
• ANFIS uses a two-pass learning cycle
▫Forward pass S1 is fixed and S2 is computed using a Least Squared
Error (LSE) algorithm (Off-line Learning)
▫Backward pass S2 is fixed and S1 is computed using a gradient
descent algorithm (usually Back-propagation)
91
S1: S2:
92
Evolutionary Computation History
• Five areas of evolutionary computation:
▫Genetic algorithms
▫Evolutionary programming
▫Evolution strategies
▫Genetic programming
▫Particle swarm optimization
• John Holland “… created the genetic algorithm field …”
• Published and taught in the field of adaptive systems in 1960s
• Derived schema theorem which shows that more fit schema are more likely to reproduce
93
Genetic Algorithms
• What are they?
▫GAs perform a random search of a defined N-dimensional solution space
▫GAs mimic processes in nature that led to evolution of higher organisms Natural selection (“survival of the fittest”) Reproduction
Crossover Mutation
▫GAs do not require any gradient information and therefore may be suitable for nonlinear problems
94
Genetic Algorithms
• Rely heavily on random processes
▫A random number generator will be called thousands of times during a simulation
• Searches are inherently computationally intensive
• Usually will find the global max/min within the specified search domain
95
General Procedure for Implementing a GA
1. Initialize population
2. Evaluate fitness of each member
3. Reproduce with fittest members
4. Introduce random crossover and/or mutations in new generation
5. Continue (2)-(3)-(4) until prespecified number of generations are complete
96
Encoding
• Population stored as coded “genes”
▫Binary Encoding Represents data as strings of binary numbers Useful for certain GA operations (e.g., crossover)
▫Real number encoding Represent data as arrays of real numbers Useful for engineering problems
97
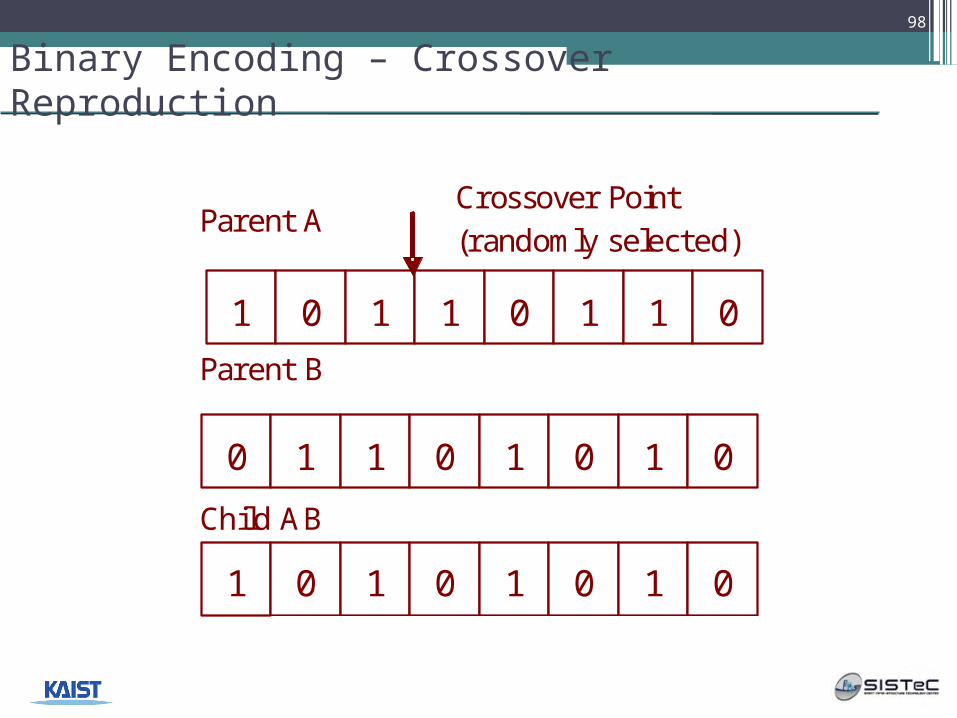
Binary Encoding – Crossover Reproduction
Parent A Parent B Child AB
Crossover Point (randomly selected)
1 0 1 1 0 1 1 0
0 1 1 0 1 0 1 0
1 0 1 0 1 0 1 0
98
Binary Encoding
• Mutation
▫Generate a random number for each “chromosome” (bit);
▫If the random number is greater than a “mutation threshold” selected before the simulation, then flip the bit
99
Real Number Encoding
• Genes stored as arrays of real numbers
• Parents selected by sorting population best to
worst and taking the top “Nbest” for random
reproduction
100
Real Number Encoding
• Reproduction
▫Weighted average of the parent arrays:Ci = wAi + (1-w)*Bi
where w is a random number 0 ≤ w ≤ 1
▫If sequence of arrays are relevant, use a crosover-like scheme on the children
101
Real Number Encoding
• Mutation
▫If mutation threshold is passed, replace the entire array with a randomly generated one
▫Introduces large changes into population
102
Real Number Encoding
• Creep
▫If a “creep threshold” is passed, scale the member of the population with
Ci = ( 1 + w )*Ciwhere w is a random number in the range 0 ≤ w ≤ wmax. Both the creep threshold and wmax must be specified before the simulation begins
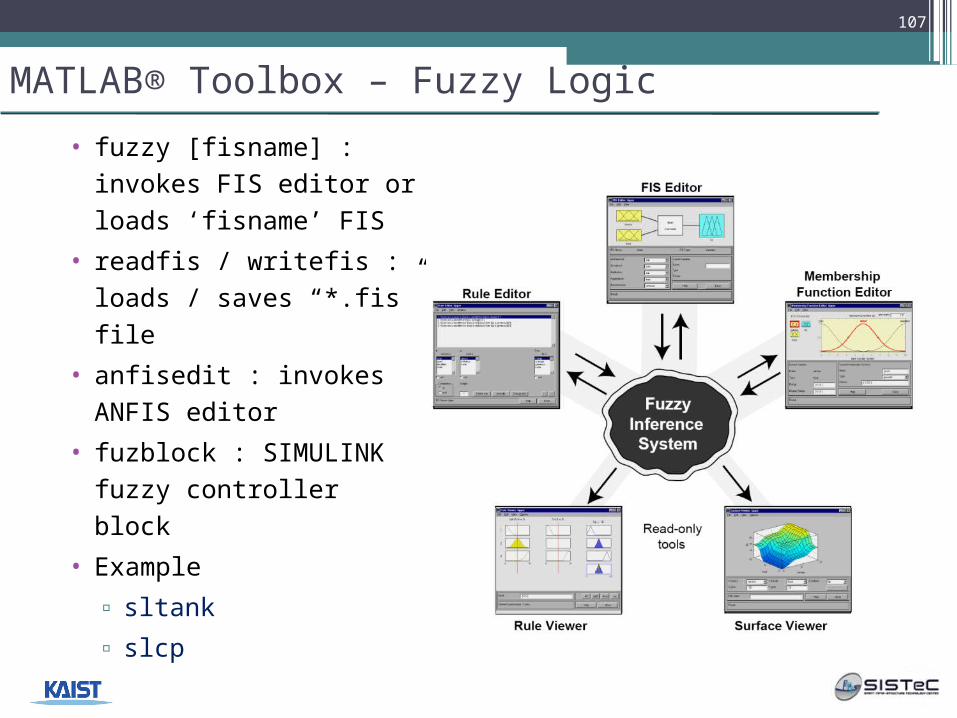
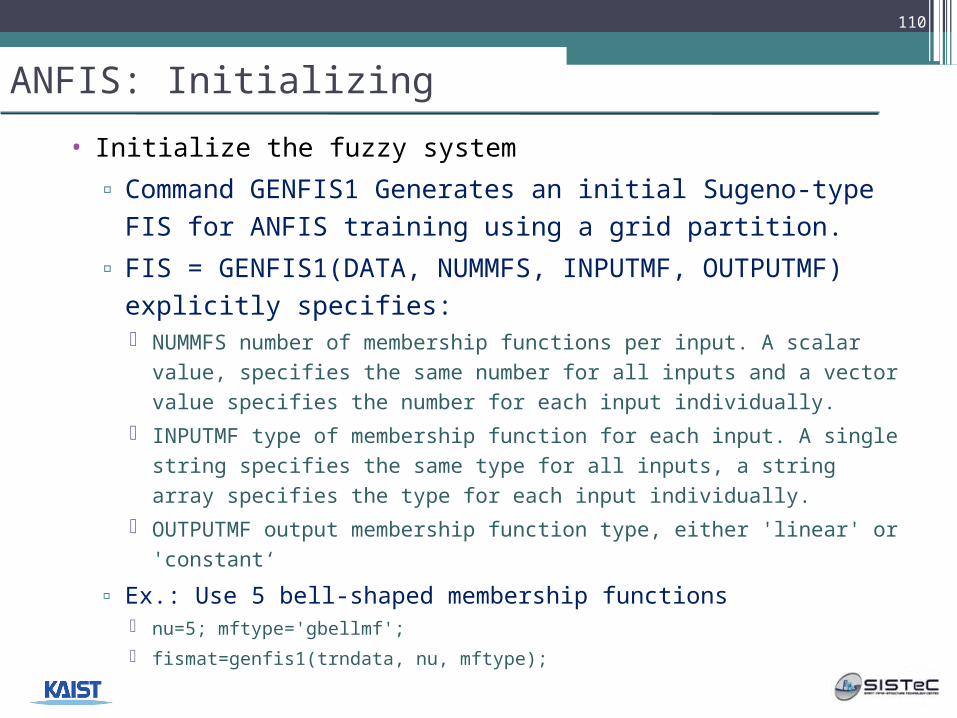
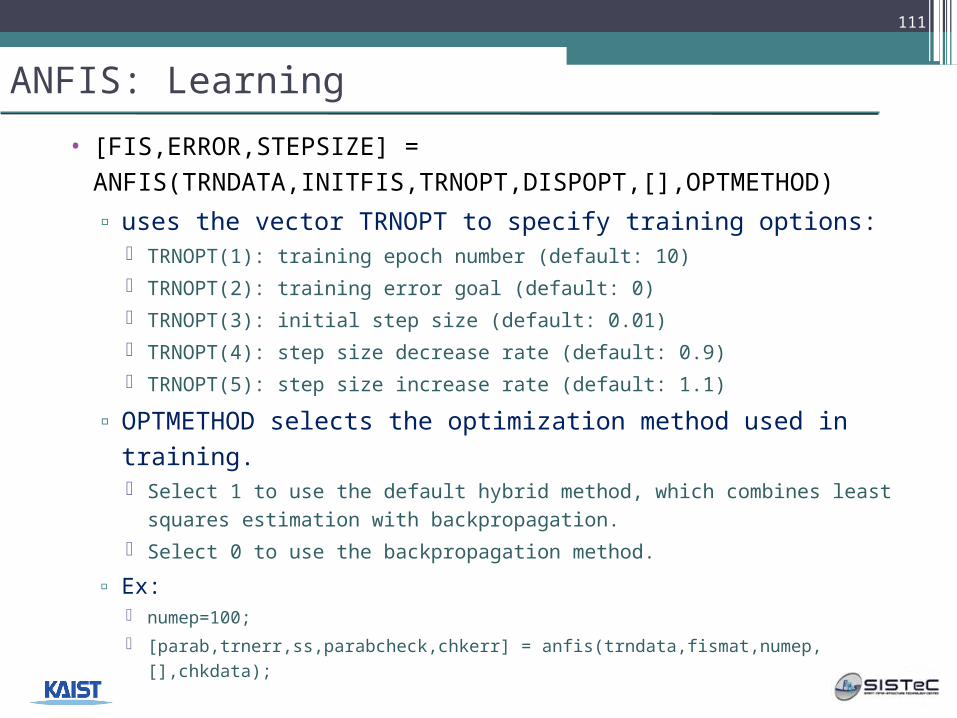
▫ Command GENFIS1 Generates an initial Sugeno-type FIS for ANFIS training using a grid partition.
▫ FIS = GENFIS1(DATA, NUMMFS, INPUTMF, OUTPUTMF) explicitly specifies: NUMMFS number of membership functions per input. A scalar
value, specifies the same number for all inputs and a vector value specifies the number for each input individually.
INPUTMF type of membership function for each input. A single string specifies the same type for all inputs, a string array specifies the type for each input individually.
OUTPUTMF output membership function type, either 'linear' or 'constant‘
▫ Ex.: Use 5 bell-shaped membership functions nu=5; mftype='gbellmf';
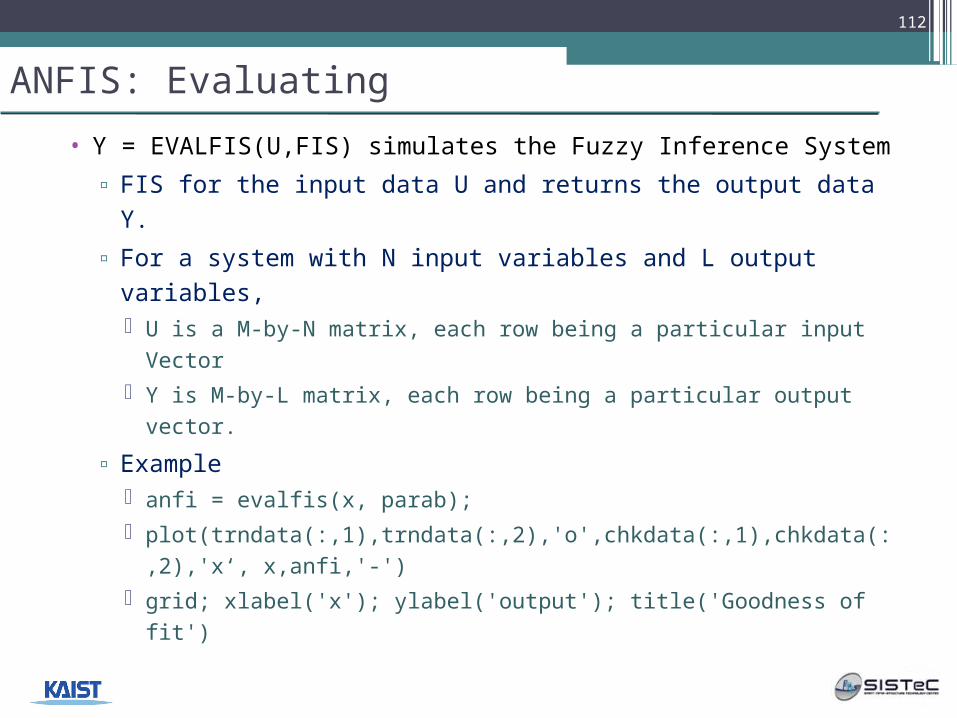
• Y = EVALFIS(U,FIS) simulates the Fuzzy Inference System
▫ FIS for the input data U and returns the output data Y.
▫ For a system with N input variables and L output variables, U is a M-by-N matrix, each row being a particular input
Vector Y is M-by-L matrix, each row being a particular output
vector.
▫ Example anfi = evalfis(x, parab); plot(trndata(:,1),trndata(:,2),'o',chkdata(:,1),chkdata(:,2),'x‘,
x,anfi,'-') grid; xlabel('x'); ylabel('output'); title('Goodness of fit')
112
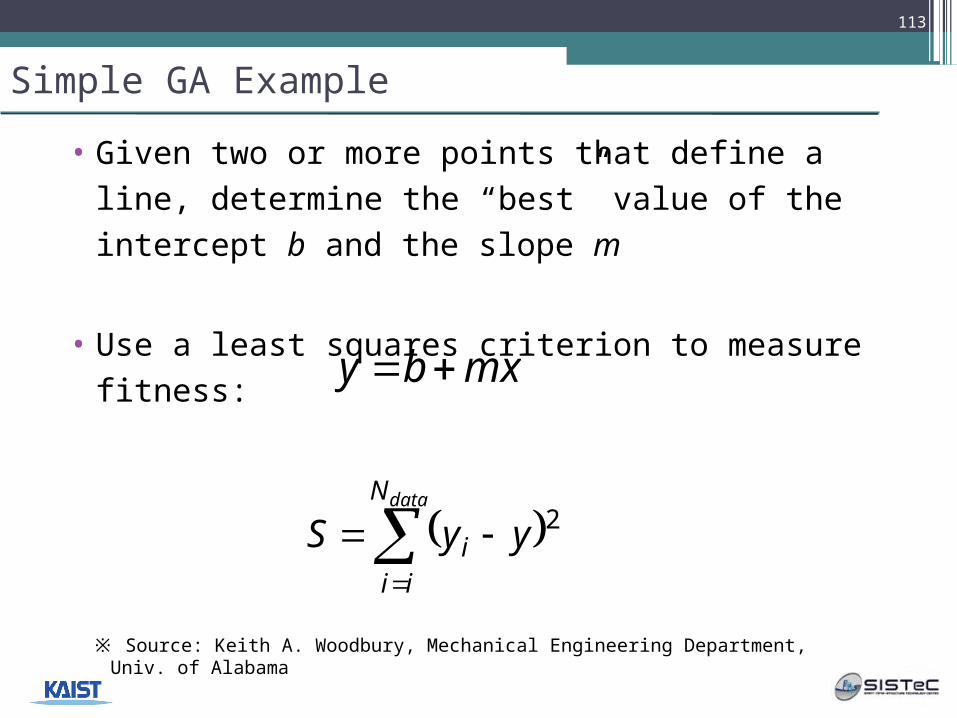
Simple GA Example
• Given two or more points that define a line, determine the “best” value of the intercept b and the slope m
• Use a least squares criterion to measure fitness:
dataN
iii yyS 2
mxby
113
※ Source: Keith A. Woodbury, Mechanical Engineering Department, Univ. of Alabama
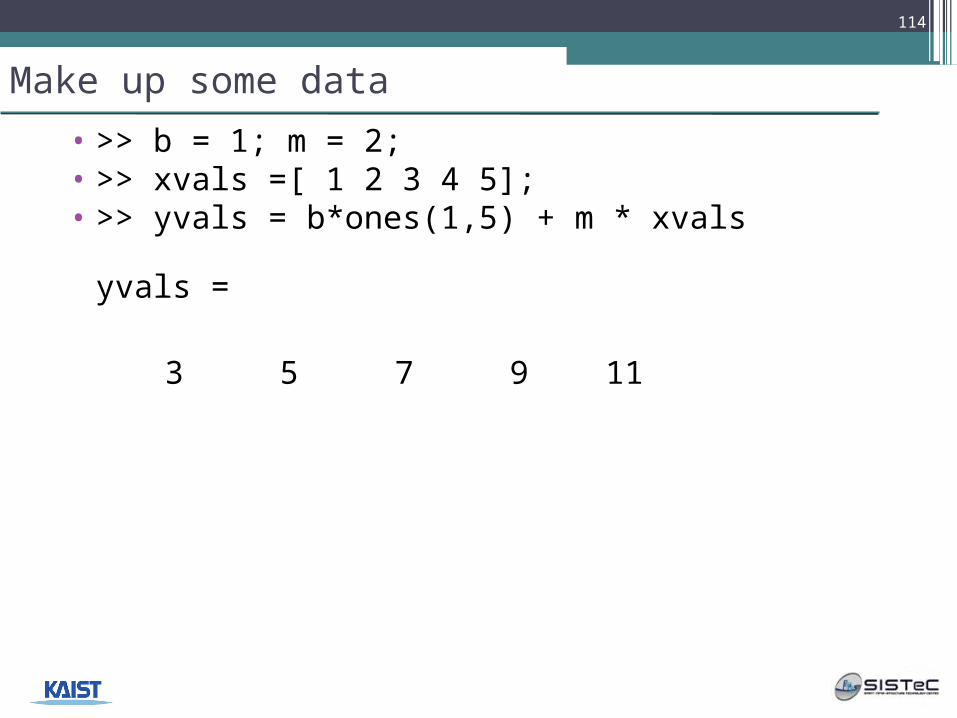
Make up some data
• >> b = 1; m = 2;• >> xvals =[ 1 2 3 4 5];• >> yvals = b*ones(1,5) + m * xvals
yvals =
3 5 7 9 11
114
Parameters
• Npop – number of members in population
• (low, high) – real number pair specifying the domain of the search space
• Nbest – number of the best members to use for
reproduction at each new generation
• Ngen – total number of generations to produce
• Mut_chance – mutation threshold
• Creep_chance – creep threshold
• Creep_amount – parameter wmax
• Ci = ( 1 + w )*Ci
where w is a random number in the range 0 ≤ w ≤
wmax.
115
Parameters
• Npop = 100
• (low, high) = (-5, 5)
• Nbest = 10
• Ngen = 100
• Mut_chance = 0.005
• Creep_chance = 0.01
• Creep_amount = 2.0
116
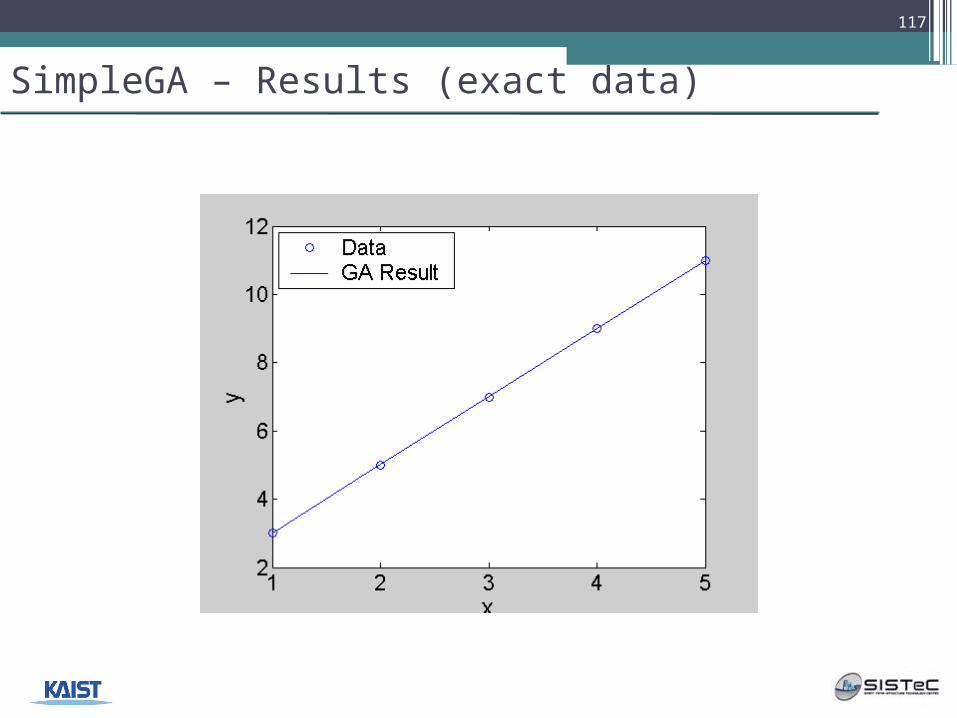
SimpleGA – Results (exact data)
117
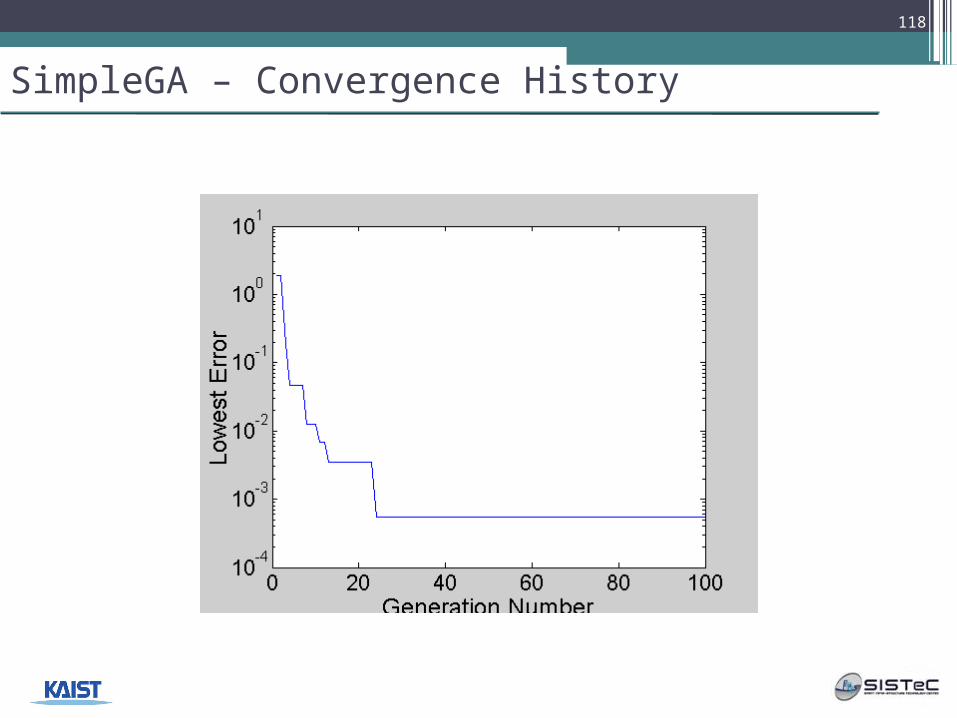
SimpleGA – Convergence History
118
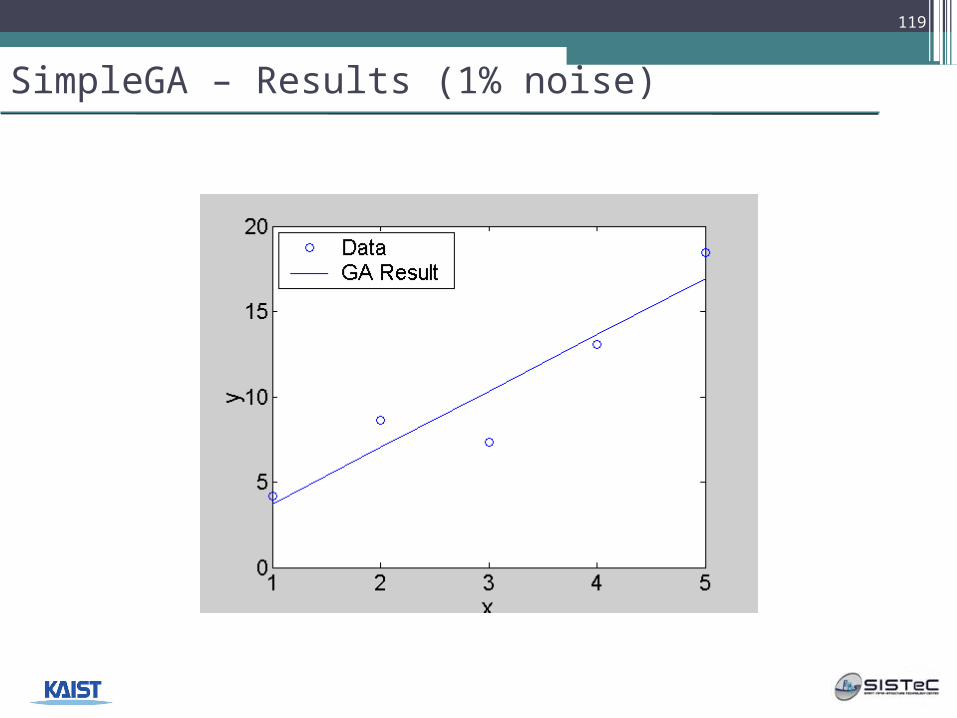
SimpleGA – Results (1% noise)
119
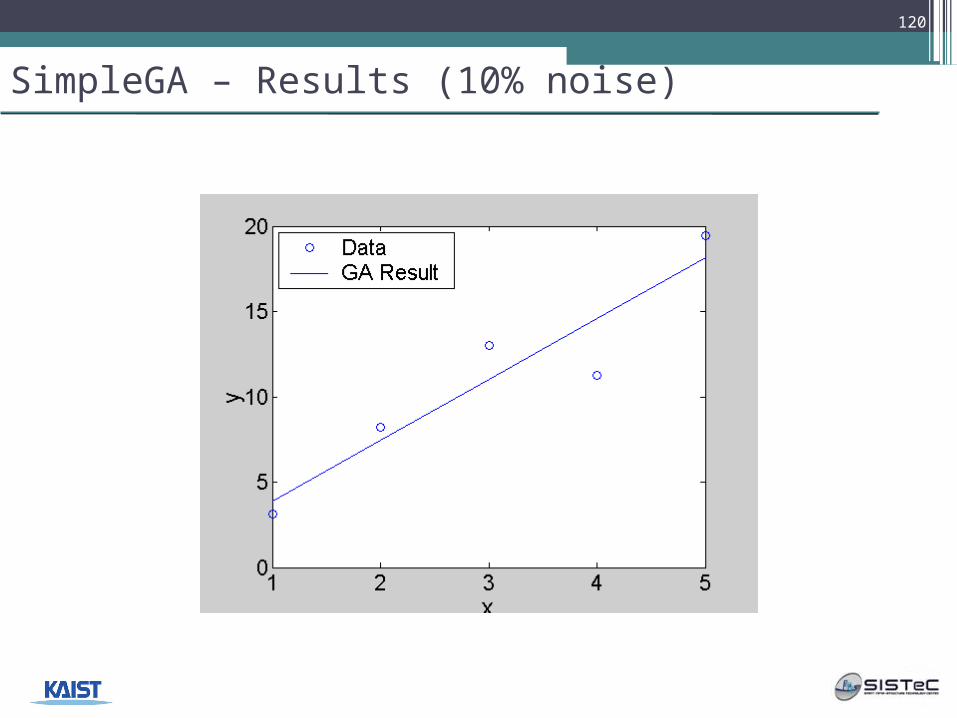
SimpleGA – Results (10% noise)
120
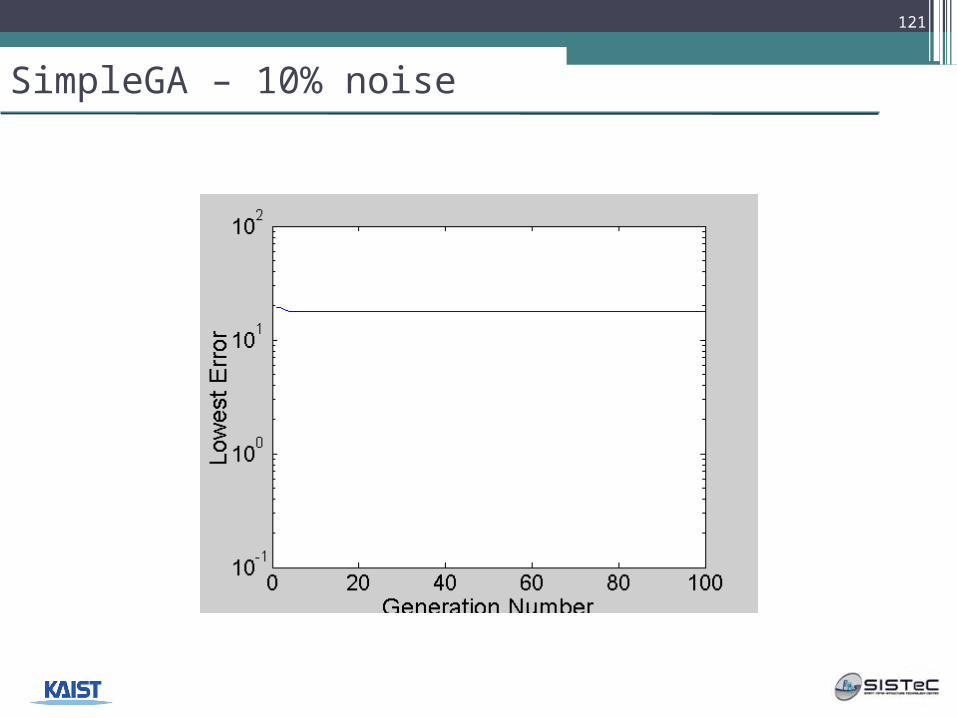
SimpleGA – 10% noise
121
References
• Computational Intelligence: Concepts to Implementations (Russell Eberhart and Yuhui Shi, Publisher: Morgan Kaufmann, 2007)
• Soft Computing and Intelligent Systems Design: Theory, Tools and Applications (Fakhreddine O. Karray and Clarence De Silva, Addision-Wesley, 2004)
• Yaxi Shen and Abdollah Homaifar, “Vibration Control of Flexible Structures with PZT Sensors and Actuators,” Journal of Vibration and Control, vol. 7, no. 3, pp.417-451, 2001.
• For more on lecture material, please visit http://web.kaist.ac.kr/~ceerobot and look at BBS.









![f @kaist.ac.kr arXiv:1909.13247v2 [cs.CV] 10 Oct 2019 · KAIST Seokeon Choi KAIST Hankyeol Lee KAIST Taekyung Kim KAIST Changick Kim KAIST fyoungeunkim, seokeon, hankyeol, tkkim93,](https://static.documents.pub/doc/80x56/5ed1947c849a967d0b463e6a/f-kaistackr-arxiv190913247v2-cscv-10-oct-2019-kaist-seokeon-choi-kaist-hankyeol.jpg)









