17
Adaptation of STAR-CCM+ Numerical Adaptation of STAR-CCM+ Numerical Wave Tank to an Offshore Floater Design Tool STAR Global Conference 2013 STAR Global Conference 2013 18 MARCH 2013
| Date post: | 01-Apr-2018 |
| Category: |
Documents |
| Upload: | vuongthien |
| View: | 225 times |
| Download: | 4 times |

Adaptation of STAR-CCM+ NumericalAdaptation of STAR-CCM+ NumericalWave Tank to an Offshore FloaterDesign Tool
STAR Global Conference 2013STAR Global Conference 2013
18 MARCH 2013

Agenda
Introduction
Design Spiral
Requirements Requirements
Technology Readiness / Gap
Euler Overlay Method
Success Stories

Three Generations of Spar Platforms
CLASSIC TRUSS CELL TRUSS
Technip has delivered 14 out of the 19 spars worldwide, in a water depthrange of 590 – 2,382 meters using both dry and wet tree completions.
Technip Presentation3
range of 590 – 2,382 meters using both dry and wet tree completions.Four more spars are under design/construction by Technip

Offshore Floaters
WindFPSO/FLNGSparSemi-submersibleUnideck®TPG 500 TLP
Supporting subsea system
Technip Slide Library4
Supporting subsea systemOperations in harsh environmentSurvive and protect crew / equipments in extreme environmentsSmall Motion

Design Spiral of Offshore Floater Design
GlobalGlobalPerformance
WAMIT / MLTSIMMotion Solver
Model Test6 month afterproject start
Hull Sizing Calibration
Air gap / green water / Slamming
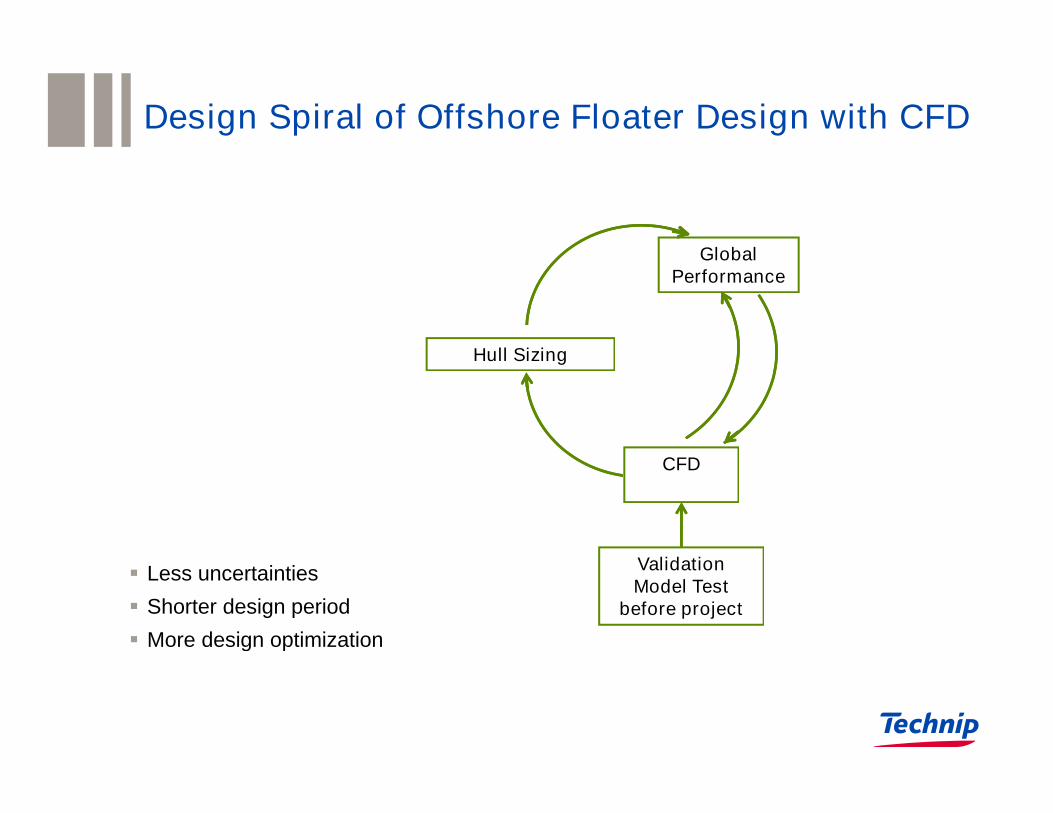
Design Spiral of Offshore Floater Design with CFD
GlobalGlobalPerformance
Hull SizingHull Sizing
CFD
Validation
CFD
ValidationModel Test
before project
Less uncertainties
Shorter design period
More design optimization

Expectations on Design Tools
Accuracy
Tolerance < 10%
Preferably conservative side Preferably conservative side
Robustness
No crash
No surprise
Predictable schedule
Speed (Screening Tool)
Less than 10 min for a short-term (3-hr) simulation
Runtime (Final Evaluation Tool)
One run < 12 hr for diagnostic runs
One run < 24 hr for production runs

Existing Design Tools
Nonlinear Time-Domain Motion (MLTSIM)
Hydrodynamic coeff. From WAMIT
Morison drag Morison drag
Nonlinear Froude-Krylov force
Large amplitude formulation
Mooring / SCR Modeling
Quasi-Static Analysis (FMOOR)
Catenary model Catenary model
5-10 min for 3-hr simulation
Screening Tool
Model Test
MLTSIM Calibration
Run up / Air Gap / Green Water
8
Ringing
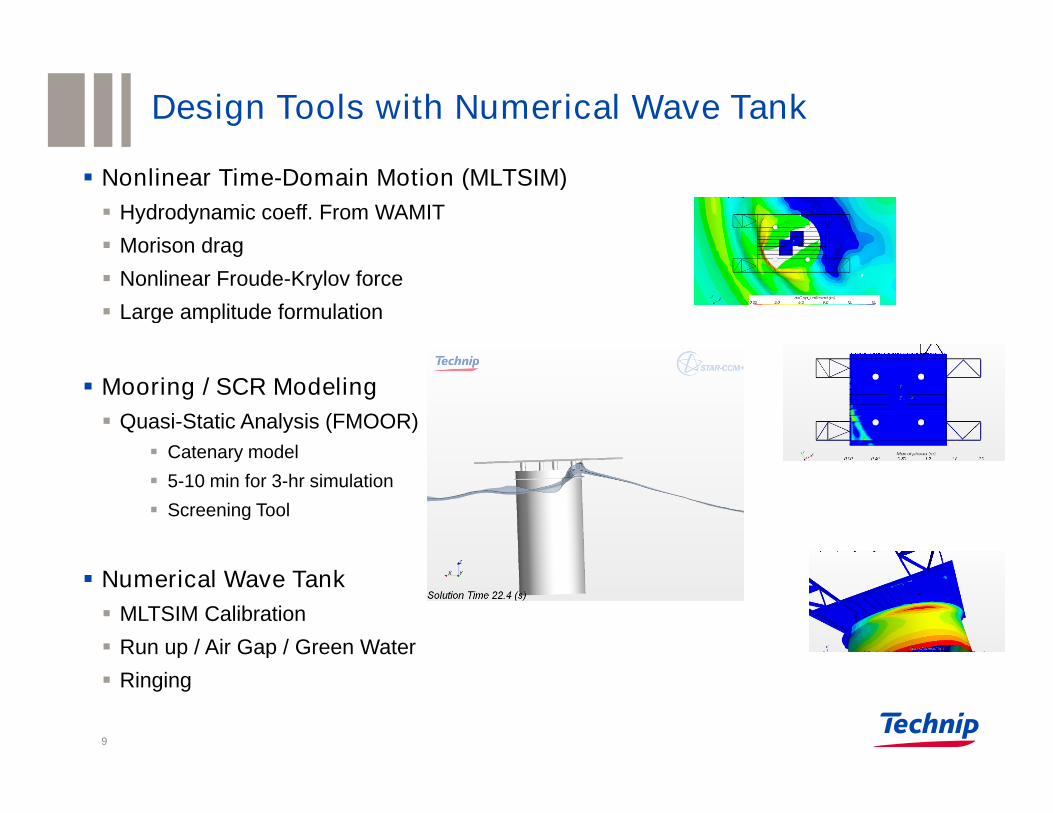
Design Tools with Numerical Wave Tank
Nonlinear Time-Domain Motion (MLTSIM)
Hydrodynamic coeff. From WAMIT
Morison drag Morison drag
Nonlinear Froude-Krylov force
Large amplitude formulation
Mooring / SCR Modeling
Quasi-Static Analysis (FMOOR)
Catenary model Catenary model
5-10 min for 3-hr simulation
Screening Tool
Numerical Wave Tank
MLTSIM Calibration
Run up / Air Gap / Green Water
9
Ringing

Technology Readiness
STAR-CCM+ Features
Free-surface capturing
Moving mesh technique Moving mesh technique
DFBI
Embedded DFBI X
Overset X
Powerful built-in pre/post processors
Hardware Hardware
In-house cluster (144 cores)
TACC Stampede ( > 10,000 cores)
1-hr simulation in one day (Semi-submersible) 1-hr simulation in one day (Semi-submersible)

Technology Gap / Solution
Wave Input
5th-Order Stokes Wave
Good for deep waterFully-nonlinear wave models Not good for shallow water extreme waves
Random wave input does not meet industry best practice
Random seeding
Wheeler stretching
Fully-nonlinear wave models
In-house wave codes Wheeler stretching
Many users were using customized user functions
Far-Field Closure
No wave-absorbing mechanism in up-wave side
Larger domain required
Numerical damping sometimes help
Euler-Overlay Method
Mooring / Riser Modeling
Built-in catenary model
Good for tendon and taut mooringIn-house Catenary / Rod
Good for tendon and taut mooring
Not good for SCRs and non-taut mooring
No dynamics
In-house Catenary / Rodmodels

Euler Overlay Method
History
Bai & Yeung (1974): Matching FE/BE solution with analytic solution
Kim & Bai (1991): Nonlinear radiation problem (Matching)
Kim, Kyoung, Ertekin & Bai (2003): Nonlinear diffraction (Overlaying)
Kim, Rajeev & O’Sullivan (2011): Nonlinear diffraction (CFD, Overlaying)
Kim, Read & O’Sullivan (2012): Nonlinear diffraction (STAR-CCM+, Overlaying)
Far-Field Solution
Euler solution
Overlaying
Boundary condition Boundary condition
Momentum and volume fraction
source / sink term in blending zone
12
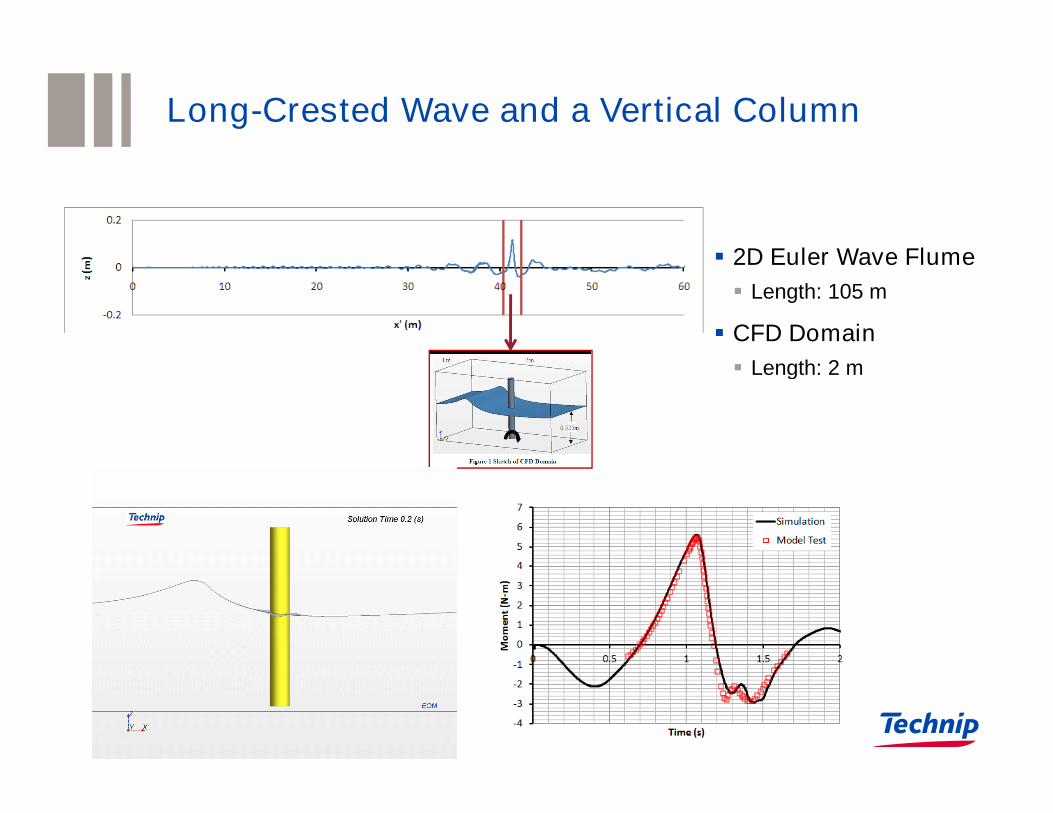
Long-Crested Wave and a Vertical Column
2D Euler Wave Flume 2D Euler Wave Flume
Length: 105 m
CFD Domain
Length: 2 m
13

Ringing Analysis of a GBS (Short-CrestedIrregular Wave)
Dynamic amplification of structural load due toresonant response of structure to higher-harmonicload

Ringing Response of TLP Tendons
Animation of simulated TLP motion and wave elevation(left).
Time history (lower left) and power spectrum (lowerright) of tendon tension. Blue curve is from model testright) of tendon tension. Blue curve is from model testand red curve is from CFD simulation. Leeside tendontension is mostly from wave frequency response (wavemodal frequency = 0.061 Hz). Weather-side tendontension shows strong ringing response at aroundheave and pitch natural frequency of the TLP (0.22 Hzand 0.23 Hz).
Leeside tendon tension
Weather-side tendon tension

Semi-Submersible Motion Simulation
Mooring and Riser Model
Look-up table for SCR and Mooring Force
Heave RAO from White-Noise Wave Test
1-hr simulation
16 hours with 640 cores
WAMIT

Conclusions / Path Forward
NWT Technology Readiness
STAR-CCM+
Euler Overlay Method
Success Stories
Air Gap / Green Water Analysis for Spar Air Gap / Green Water Analysis for Spar
Ringing Analysis for GBS and TLP
Motion Analysis for Semi-Submersible
Improvements
Wave models
Mooring / riser modeling Mooring / riser modeling
Building the Future
Validation and Improvements through JIP Validation and Improvements through JIP
Recommended Practice

















