Accepted Manuscript Adaptive Localized Replay: An efficient integration scheme for accurate simulation of coarsening dynamical systems Scott A. Norris, Skyler Tweedie PII: S0021-9991(14)00335-0 DOI: 10.1016/j.jcp.2014.05.003 Reference: YJCPH 5249 To appear in: Journal of Computational Physics Received date: 17 October 2013 Revised date: 1 May 2014 Accepted date: 2 May 2014 Please cite this article in press as: S.A. Norris, S. Tweedie, Adaptive Localized Replay: An efficient integration scheme for accurate simulation of coarsening dynamical systems, Journal of Computational Physics (2014), http://dx.doi.org/10.1016/j.jcp.2014.05.003 This is a PDF file of an unedited manuscript that has been accepted for publication. As a service to our customers we are providing this early version of the manuscript. The manuscript will undergo copyediting, typesetting, and review of the resulting proof before it is published in its final form. Please note that during the production process errors may be discovered which could affect the content, and all legal disclaimers that apply to the journal pertain.
Transcript
Accepted Manuscript
Adaptive Localized Replay: An efficient integration scheme foraccurate simulation of coarsening dynamical systems
Received date: 17 October 2013Revised date: 1 May 2014Accepted date: 2 May 2014
Please cite this article in press as: S.A. Norris, S. Tweedie, Adaptive Localized Replay: Anefficient integration scheme for accurate simulation of coarsening dynamical systems, Journalof Computational Physics (2014), http://dx.doi.org/10.1016/j.jcp.2014.05.003
This is a PDF file of an unedited manuscript that has been accepted for publication. As aservice to our customers we are providing this early version of the manuscript. The manuscriptwill undergo copyediting, typesetting, and review of the resulting proof before it is publishedin its final form. Please note that during the production process errors may be discovered whichcould affect the content, and all legal disclaimers that apply to the journal pertain.
Adaptive Localized Replay: an efficient integration scheme for
accurate simulation of coarsening dynamical systems
Scott A. Norris and Skyler Tweedie
May 8, 2014
Department of Mathematics
Southern Methodist University
Abstract
Coarsening dynamical systems (CDS) of ordinary differential equations (ODEs) have as a defining feature the
presence of discontinuities in the governing equations, due to the removal of vanishing elements from the system.
Simple, commonly-used integration strategies for ODEs neglect these discontinuities, resulting in large errors. In
contrast, available methods to resolve discontinuities exhibit total running times that scale like O(N2
)as the number
of elements N → ∞. The resulting need to choose between either speed or accuracy frustrates attempts to gather
well-converged statistical data from large ensembles of elements, a common goal in studies of coarsening.
In this work, we introduce a numerical scheme, called Adaptive Localized Replay (ALR), which overcomes
this dilemma, provided the underlying system has sparse neighbor dependence. By analyzing the system after each
timestep, and then selectively re-simulating only those (small) parts of the system that were affected by discontinu-
ities, we attain high-order accuracy while maintaining running times of O (N). Using a reference implementation of
our algorithm, applied to a sample problem from the field of faceted surface evolution, we obtain convergence and
runtime results for the ALR method, which compares favorably with existing methods.
1 Introduction
The characterization of micro-structured materials is a fundamental issue in materials science, since the statistics
of microstructural morphology play a central role in determining effective material properties. In many regimes of
growth or relaxation, microstructured materials can exhibit coarsening, during which small microstructural features
continually decrease in size until they vanish, causing the average lengthscale of those that remain to increase with
time. Of particular interest, many such systems exhibit dynamic scaling, whereby the microstructural variations ap-
proach a constant statistical state even as the length scale increases. This behavior is of intense interest, because if the
scale-invariant state can be understood theoretically, and its dependence on environmental parameters predicted, then
one has the possibility for creating predictable and controllable microstructures at a statistical level, despite a lack of
control over the structural evolution at any single location within the material.
A particularly interesting coarsening system for the study of scaling phenomena is that of completely faceted
surfaces. These have an inherent structural simplicity that arises because each facet in such a system moves as a single
unit. Hence, in many cases, the nonlinear PDEs that fully describe the system (e.g., [1, 2, 3, 4]) can be simplified
1
via asymptotic analysis to a facet velocity law providing the normal velocity of each facet (e.g., [5, 6, 7, 8, 9, 10]).
Because the facet velocity law specifies the interfacial velocity of a continuous surface by means of discrete, constant
quantities, the computational complexity of simulating the surface evolution reduces to that of a system of ordinary
differential equations (ODEs). In essence, the surface is governed by a dynamical system of the form
dxdt
= f(x) , (1)
with the vector x containing one entry per facet, but where the dimension of the system decreases every time a coars-
ening event happens. The resulting structure has been termed a Coarsening Dynamical System (CDS), and the relative
simplicity of the governing equations, combined with the easy availability of standard numerical solvers, represent
notable attractions of the faceted surface problem relative to other coarsening problems. Accordingly, this approach
has been employed frequently for one-dimensional surfaces [11, 12, 13, 8, 10, 14, 15, 16, 17, 18], although less so for
two-dimensional simulation [19, 20, 21, 22, 23, 9, 24], where the resolution of topological events becomes the dom-
inant computational cost (note that the use of phase-field [25, 26] or level-set [21, 22, 27] methods avoid the manual
resolution of topological events, at the cost of losing the structure exhibited by Eq.(1)).
For the detailed study of scale-invariance exhibited by coarsening faceted surfaces, it is necessary to gather statis-
tics on the average geometric properties of the system (e.g., the coarsening exponent [28, 29]), to use as the basis for,
or test of, theories attempting to explain or predict the statistical behavior [23, 30]. In order to get well-converged
statistics, one typically wants to simulate systems with as many elements as possible. This is facilitated by the simple
structure of Eq.(1); however, coarsening systems can easily lose most of their elements prior to reaching the scale-
invariant state, and so reasonable convergence within that state can require truly enormous numbers of initial elements.
In order to perform such large simulations as quickly as possible, large timesteps are naturally desired. Finally, to en-
sure that these large timesteps do not introduce too much error into the gathered statistics, one ideally would like to
use high-order methods. Hence, for the acquisition of statistics from the simulation of very large CDSs, the use of
high-order methods for numerical ODEs is highly desired.
It turns out, however, that the use of standard high-order methods on CDS problems with the form (1) is prob-
lematic. Faceted surfaces, in particular, often exhibit facet velocity laws that are configurational, depending on local
facet geometry. During the coarsening process, topological changes to the surface can alter these geometries suddenly,
which means that the resulting dynamical system is generically discontinuous in time. Besides the theoretical prob-
lems posed by these discontinuities, there are computational problems as well. Specifically, the times of the coarsening
events are not known in advance, and generic ODE solvers inevitably overstep these times. Sudden, discontinuous
changes to a few components of the system, if not detected properly, induce errors proportional to the timestep length.
Although algorithms for avoiding these errors exist, the standard method of doing so involves reverting the entire
system to the time a discontinuity occurred, updating the system, and then proceeding. Because the discontinuities are
typically localized during a given timestep, reverting the whole system is extremely wasteful, consuming most of the
computational time in the simulation. Because both the speed and accuracy of simulations are currently limited in this
way, the quantity and quality of statistics that can be gathered and used to test theories is also limited.
In this manuscript we introduce a method for the simulation of Eq.(1) that avoids the poor scaling of traditional
methods for handling discontinuities, while preserving their accuracy, by exploiting the nearest-neighbor structure
of most facet evolution laws. We begin by quantifying the error induced by ignoring the discontinuity altogether
during a timestep of length Δt, and show that for systems with nearest-neighbor dependency structures, the error
scales like ΔtD, where D is the neighbor distance away from the facet exhibiting the discontinuity. Hence, if one
wishes to preserve an O(ΔtP
)method, one only needs to correct the outcome of the directly affected facets, and the P
2
nearest neighbors to each side. This can be done by carefully re-simulating only small subdomains of facets associated
with each coarsening event, and using polynomial interpolations of further neighbors to close the system at a small
size. To ensure the accurate correction of such subdomains, an adaptive approach is required that gracefully fails if
unanticipated events are detected, lending the algorithm the name of Adaptive Localized Replay.
2 An example problem and a reference method.
Specific examples of the kinds of CDSs described in the introduction include asymptotic reductions of the 1D Cahn-
Hilliard equation for spinodal decomposition [31], and the generalized convective Cahn-Hilliard equation [13, 2, 8]:
ut +αuux =
{δδu
[F (u)+
12(ux)
2]}
xx=[F ′ (u)− εuxx
]xx . (2)
Here u(x, t) is an order parameter describing the phase of the system, F (u) is a double-welled energy potential driving
the system toward one well or the other, ε is a small parameter penalizing rapid changes in u(x, t), and α measures
the strength of a non-conserved driving force. The variational structure of the right-hand side drives the system into
a configuration consisting of large alternating domains where u is nearly equal to one of the two minimizers of F (u),
separated by rapid transitions between the two values, called “steps” or “kinks”.
Asymptotic analysis of Eq.(2) leads to relatively simpler expressions for the evolution of the step locations, and
hence, of the domain sizes, which we will denote {xi}. For the original Cahn-Hilliard equation (α = 0), encountered
in studies of phase separation, the CDS governing domain size evolution take the form [32, 33, 34]
dxi
dt=
1xi+1
[exp(−xi+2)− exp(−xi)]+1
xi−1[exp(−xi)− exp(−xi−2)] . (3)
More recently, the convective form of the Cahn-Hilliard equation (α > 0) has received much attention, appearing in
particular during the solidification of an anisotropic material into an undercooled melt [2]. An asymptotic analysis of
the CCH shows that the resulting CDS for the domain sizes is [13, 8]
dxi
dt= (−1)i
[1
exp(xi+1)−1− 1
exp(xi−1)−1
]. (4)
To most clearly communicate the essential features of our algorithm, we will here consider a simpler CDS, en-
countered in the directional solidification of binary alloys [35, 10]. Under a simple negative effective thermal gradient,
the vertical velocity of each facet is simply proportional to the vertical co-ordinate of its midpoint, leading to a CDS
on the facet widths ofdxi
dt=
14[2xi − xi−1 − xi+1] . (5)
We are not concerned with the specifics of this system, but for the illustration of a numerical algorithm, it has ad-
vantages over Eqs.(3)-(4). In contrast to Eq.(3), it has a simpler structure, with the rate of change of each domain
length depending only on the nearest neighbors. And, in contrast to Eq.(4), it is continuous for all values of the {xi}.
Nevertheless, it shares important general properties with Eqs.(3)-(4). In particular, we can immediately see that this
system will lead to coarsening. If any particular facet xi is much shorter than the average facet length, then on average,
the right-hand side of Eq.(5) is negative, and the length will continue decreasing until it reaches zero. Assuming that
facet slopes alternate, a zero-length facet causes its own elimination, and also the merger of its two neighbors into a
3
position x
time
t
(a)
position x
t3
t2
t1
heig
ht h
hillvalley
(b)
Figure 1: (color online) (a) A schematic of a coarsening event. The small facet shrinks in size until it vanishes,causing the annihilation of the bounding convex/concave corners, and the merger of its two neighbors into a single,larger facet. (b) A visualization of part of the simulation of a large surface, showing the location of corners colored asin (a); coarsening events occur whenever two corners meet and annihilate.
single, larger facet with length equal to the sum of the neighbors [35]:
Equation (12) tells us that an O (1) error, at time t, in the value of the nth neighbor of xi, will appear first in the function
fn (�), and therefore induces an error of size O (Δtn) in the value of xi (t +Δt). Alternatively, we can say that, if we
seek a method with overall accuracy of O(ΔtP
), then an O (1) error at facet xk destroys the accuracy only of the Pth
nearest neighbors of xk. Hence, for the coarsening event shown in Fig. 1a, where three facets are replaced by a single
facet with qualitatively different length, only these three facets and their P nearest neighbors need any attention; all
facets further away remain accurate to within the order of the method.
7
3.2 Algorithm
The preceding analytical result suggests a strategy for an accurate method that can run in O (N) time. Briefly, we
first take the system through a single solver step, ignoring any discontinuities as in Algorithm 1. We then identify
the facets that were involved in coarsening events during the timestep. Except for these facets and their Pth nearest
neighbors, all of the other facets in the system must be accurate to O(ΔtP
). So, if we could re-simulate the evolution
of these subdomains using the more accurate Algorithm 2, we would have accurate values for all facets in the system.
Furthermore, because the subdomain size 2P+ 3 is independent of the system size N, the subdomains can be re-
simulated in O (1) time, and the overall method should be O (N).
The challenge posed by re-simulating only a subdomain is the nearest-neighbor structure of Eq.(5), in which the
evolution of the (P+1)th neighbors require knowledge of the (P+2)th, which require knowledge of the (P+3)th, and
so on. However, because the (P+2)th neighbors are accurate to the order of the method, we may replace their values
during the re-simulation with polynomial interpolations of their evolution during the original solver step, resulting
in a closed system of 2P+ 3 equations. Care must be taken, because patches can overlap, and the re-simulation
process, because it is more accurate than the first “test” solve, may reveal additional events not originally detected.
Nevertheless, such difficulties can be handled in a robust manner according to the following algorithm.
Algorithm 3.
Step 1. Take a full timestep from tn to tn+1 with an ordinary ODE solver.
Step 2. Identify all facets that vanished during the timestep, which will have attained a negative length by the end of
the timestep.
Step 3. For each vanished facet, construct a subdomain consisting of (a) the facet itself and its nearest neighbors,
which join to form the new facet, (b) a “buffer zone” of the P nearest neighbors of these facets in each direction,
and (c) an O(ΔtP
)polynomial interpolation of the evolution of the P+1st neighbors, or boundary facets. The
nearest-neighbor structure of Eqn.(5) ensures that errors due to vanished facets did not reach these boundaries
during Step 1.
Step 4. Combine any overlapping subdomains into larger subdomains, consisting of polynomial interpolations of the
leftmost and rightmost boundary facets, and all of the facets in between; place the resulting unique subdomains
into a list.
Step 5. Re-simulate each subdomain using Algorithm 2, substituting the included polynomial interpolants for the
values of the boundary facets within the system of ODEs. Because the evolution of the boundary facets is
accurate to the same O(ΔtP
)of the global method, the interpolants may be used to provide closure to the re-
simulation of the subdomains. The use of Algorithm 2 for the re-simulation ensures that the correct governing
equations are used at all times. The more accurate re-simulation in Step 5 may reveal additional coarsening
events not originally detected in Step 2. Whether or not this is a problem depends on the location of the event.
Step 6. If a re-simulation is completed with no newly-discovered events inside the “buffer zones,” then the result is
taken to be an accurate correction to the result of Step 1. However, we do not immediately apply the correction,
but rather move the subdomain to a list of finished “patches” to the outcome of Step 1. Proceed to the next
subdomain and return to Step 5.
8
Step 7. On the other hand, if re-simulation reveals additional coarsening events that occur inside the buffer zone, then
the result remains insufficiently accurate, as the newly-discovered vanishing facets induce errors beyond the
original boundary facets. In this case, more care must be taken.
Step 7a We first restore the re-simulated facets to their original values, enlarge the subdomain so as to include
the new vanishing facet, as well as sufficient buffer zones and boundary polynomials on the left and right
hand sides.
Step 7b. Because this subdomain has grown larger than its initial size, it occasionally now overlaps with a pre-
viously distinct domain. We must compare the enlarged subdomain to both the list of waiting subdomains,
and also the list of finished patches.
Step 7c. If the enlarged subdomain overlaps with any member of these two lists, then we delete that mem-
ber, and uniquely merge its contents into the existing subdomain, including appropriate buffer zones and
boundary polynomials. Return to Step 5 with the enlarged subdomain.
Step 8. Proceed iteratively through Steps 5-7 until the list of subdomains is empty. At this point, the list of patches
contains updated values for all facets for which Step 1 produced large errors. Apply each patch in the list of
patches to the outcome of Step 1.
To distinguish it from the Full Replay method (Algorithm 2), we shall call this method the Adaptive Localized Replay
(ALR) method, because only facets near to the coarsening events must be re-simulated, at the cost of a more complex,
adaptive algorithm.
The most important features of this algorithm are: (Step 1) most of the surface can be accurately simulated by a
standard ODE solver; (Step 2-5) only localized regions of the surface need to be re-simulated with the discontinuity-
aware Algorithm 2, which can be done by closing the subdomains with polynomial interpolations of the boundary
facets; and (Step 7) unanticipated events discovered during re-simulation can be gracefully handled by an adaptive
procedure, regardless of whether or not those facets were originally detected in Step 2. It is this adaptive re-simulation
of local patches of surface - required to make the method O (N) - which is unusual in this approach, and gives the
method its name.
4 Testing and Results
We have implemented the Adaptive Localized Replay algorithm for the coarsening dynamical system described by
Eq.(5). In addition, we have implemented the simpler Algorithm 2 to validate the accuracy of our implementation of
Algorithm 3. Finally, we have implemented the common, but inaccurate, Algorithm 1 for reference. For each of these
algorithms, we will perform test simulations using a variety of underlying Runge-Kutta solvers, of varying orders of
accuracy. We present results on the relative accuracy of each combination, as well as the speed of the ALR method
relative to the Full Replay method.
Convergence: individual facet lengths. We first demonstrate the convergence properties of all three algorithms
described above. For an initial condition consisting of 100 facets with random lengths, we simulate from t = 0 to
t = 1, during which more than half of the facets vanish (one time unit is therefore roughly a “half-life” of a facet under
Eq.(5), and serves as a characteristic timescale of the overall system). As a reference solution, we solve via Algorithm
2, using RK4 with a timestep of Δt = .0005. Then, we compute the solution using all three algorithms, using each of
9
(a)
(b)
(c)
(d)
1 2 3 45
67
8 9 10 11 12 1314
1516
17 18 19 20
Figure 2: Schematic of various parts of the algorithm, for a patch of surface containing multiple small facets about tocoarsen, and specially constructed so as to exhibit all possible difficulties. For the sake of a smaller illustration, we usebuffer zones appropriate to a method of order P= 2. (a) During a test timestep (Step 1), three small facets k = {5,7,16}are found to have vanished (Step 2), and re-simulation zones are constructed (Step 3). (b) Prior to re-simulation, two ofthe zones are found to overlap, and are merged into a single zone (Step 4). (c) During re-simulation of the subdomains(Step 5), the left domain finishes successfully (Step 6), but the right domain encounters the unanticipated coarseningof facet k = 14 (Step 7). That domain is increased in size to account for the newly-discovered event (Step 7a). (d)However, the enlargement causes the new domain to overlap an existing domain (Step 7b), and so the contents of thetwo domains are merged (Step 7c), and the entire merged domain is re-simulated again as a single unit using Algorithm2 (Step 5).
10
log10( t)
log 1
0(error)
convergence of lengths: pre-remove
EulerRK2RK4
(a)
log10( t)
log 1
0(error)
ALR methodFull Replay
Euler
RK2
RK4
convergence of lengths: Full and ALR
(b)
Figure 3: Convergence results on individual facet lengths, comparing each of the various algorithms described hereinas the timestep Δt → 0. (a) If facets are merely removed after reaching a small threshhold (Algorithm 1), the neglectof discontinuities leads to only O (Δt) convergence, regardless of the underlying solver. (b) In contrast, both the FullReplay method (Algorithm 2) and the ALR method (Algorithm 3) converge with the accuracy of the underlying solver,despite the presence of O (1) discontinuities in the solution. (Note: the less accurate methods, including all instancesof Algorithm 1, can fail to observe some events that are captured by the reference solution, resulting in a computedsolution with a different number of elements than the reference solution. In these cases, the application of Eq.(13) isimpossible, and the “error” is instead set to unity.)
Euler, RK2, and RK4 as the underlying solver, for time steps Δt ∈ {.1, .05, .02, .01, .005, .002, .001}, and record the
error in each of these solutions relative to the “exact” solution. As an error measure we use the infinity norm
e(Δt) = maxk
∣∣xk,Δt − xk,.0005∣∣ . (13)
The error for the various methods as a function of Δt is shown in Figure 3, in log-log form. In Figure 3a, we see that
Algorithm 1 never attains better than first-order accuracy, regardless of the underlying solver. In Figure 3b, however,
we see that both the Full Reply and the ALR methods retain the accuracy of the underlying Runge-Kutta solver, despite
the presence of discontinuities due to coarsening. For relatively large values of Δt, the smaller error of the Full Replay
method is not due to any greater accuracy of the method itself, but rather to the effect discussed in Section 2.2, where
due to the full resimulation at each coarsening event, the effective timestep is actually smaller than the value shown on
the axis. As Δt → 0, the errors of both methods approach the same value.
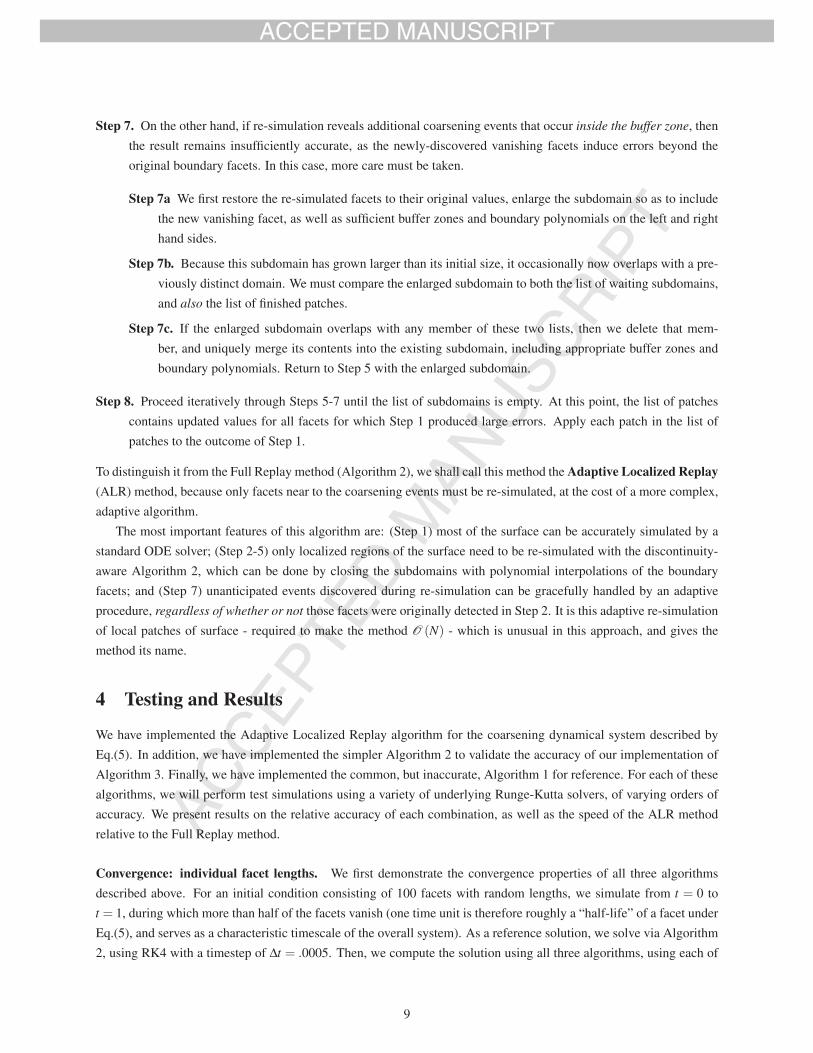
Convergence: statistical measures. A primary aim of large ensemble simulations is the collection of statistics, so
we also wish to demonstrate the convergence of some representative statistical property. The mean facet length is a
quantity of obvious interest, but because the total interface length is conserved, the mean facet length varies discretely
with the number of remaining facets, and is therefore a poor choice for convergence studies. However, subsequent
moments of the facet length distribution are continuous functions of the facet lengths. We therefore present in Figure 4
results on the convergence of the variance of the distribution, illustrating that statistics as well as individual variables
are affected by the numerical error associated with discontinuities. Here, using the now-validated ALR method, we ran
simulations beginning with 1,000,000 facets for five time units, by which time only a few thousand facets remained,
which had achieved scale-invariant behavior. Examining the dependence of the variance of this distribution on the
timestep, we see the same behavior as for the individual facet lengths. Skewness, kurtosis, etc. all display similar
11
Euler
RK2
RK4
log10( t)
log 1
0(error)
convergence of distribution variance
Figure 4: Convergence results for statistical data, using the ALR method with various underlying Runge-Kutta solvers.Here a sample of 1,000,000 facets is simulated for five time units, until only a few thousand remain, which havereached a scale-invariant state. At that time the variance of the length distribution is measured, and plotted as afunction of the timestep used to perform the simulation. The less-accurate methods have significantly more remainingfacets, leading to relatively large errors in the statistical data.
behavior.
Runtime Comparison. We now demonstrate the run time of each method, by calculating the total CPU time needed
to simulate from t = 0 to t = 1 for a variety of system sizes N. Because the main practical advantage of the ALR
method lies not in extreme accuracy, but rather reduced simulation time, we present results for a timestep of Δt = 0.1.
This is near to the characteristic timescale of the system, but according to Figure 3 still provides around five digits of
accuracy if RK4 is used as the underlying solver. This choice therefore represents a reasonable balance of accuracy
and speed.
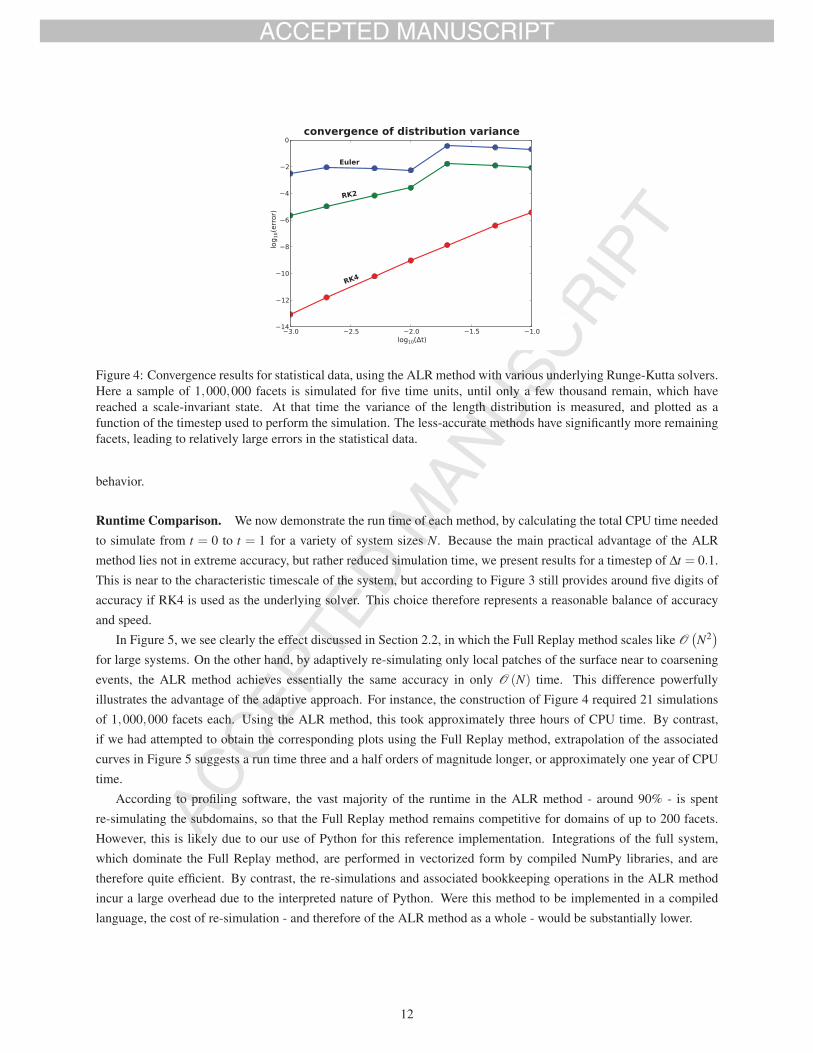
In Figure 5, we see clearly the effect discussed in Section 2.2, in which the Full Replay method scales like O(N2
)for large systems. On the other hand, by adaptively re-simulating only local patches of the surface near to coarsening
events, the ALR method achieves essentially the same accuracy in only O (N) time. This difference powerfully
illustrates the advantage of the adaptive approach. For instance, the construction of Figure 4 required 21 simulations
of 1,000,000 facets each. Using the ALR method, this took approximately three hours of CPU time. By contrast,
if we had attempted to obtain the corresponding plots using the Full Replay method, extrapolation of the associated
curves in Figure 5 suggests a run time three and a half orders of magnitude longer, or approximately one year of CPU
time.
According to profiling software, the vast majority of the runtime in the ALR method - around 90% - is spent
re-simulating the subdomains, so that the Full Replay method remains competitive for domains of up to 200 facets.
However, this is likely due to our use of Python for this reference implementation. Integrations of the full system,
which dominate the Full Replay method, are performed in vectorized form by compiled NumPy libraries, and are
therefore quite efficient. By contrast, the re-simulations and associated bookkeeping operations in the ALR method
incur a large overhead due to the interpreted nature of Python. Were this method to be implemented in a compiled
language, the cost of re-simulation - and therefore of the ALR method as a whole - would be substantially lower.
12
ALR MethodFull Replay
log10(N)
log 1
0(ru
n tim
e [s
econ
ds])
run time comparison
Figure 5: Comparison of runtime for the Full Replay and ALR methods, for various system sizes N. The O(N2
)running time of the Full Replay method is readily apparent, as is the O (N) running time of the ALR method.
Relative Frequency of Events. Finally, we present a brief summary of the relative frequency of different parts of
Algorithm 3, again using a timestep of Δt = 0.1. At this timestep, an average system containing 10,000 facets will
display the following behavior during each step:
• around 800 facets will vanish, requiring discontinuity detection and subomain construction (Steps 2-3). Because
the fourth-order method requires 11 consecutive facets to be re-simulated per coarsening event, it is clear that a
large fraction of the facets must be re-simulated each timestep for this Δt.
• Due to the high fraction of vanishing facets, the 800 subdomains will display considerable overlap, resulting in
only around 350 distinct groups (Step 4). Hence, the average subdomain contains between 2-3 events, involving
around 20-30 facets. At these sizes the overhead of Algorithm 2 is not significant.
• of the 350 groups, around 300 will re-simulate successfully with no unexpected discontinuities (Steps 5-6).
However, around 50 will reveal additional events that were not detected initially, requiring the enlargement of
the subdomain before attempted re-simulation (Step 7a).
• of the 50 enlargements, around 10 will turn out to overlap with an existing subdomain (Step 7b), requiring an
additional merger before re-simulation (Step 7c).
The latter observations highlight the importance of the adaptive nature of our approach. Without adaptivity, around
0.5% of coarsening events will be missed, which reduces the accuracy of around 5% of facets. This occurs each
timestep, and so most facets would be affected by the end of a simulation.
We note that further increases in the timestep will be accompanied by increases in the number of vanishing facets.
Eventually, this will lead to percolation of the subdomains into extremely large groups of size O (N). The re-simulation
of these domains under Algorithm 2 then takes O(N2
)time, and the speed advantage of the method is lost. However,
this merely reflects the presence of a characteristic time over which the governing equations of all facets change
discontinuously. It seems reasonable that this timescale represents a physical upper limit on the possible timestep size.
13
5 Conclusions and Future Work
We have presented a numerical scheme named Adaptive Localized Replay for the integration of coarsening dynamical
systems, which achieves high-order accuracy without the poor scaling performance typical of traditional algorithms
for integrating differential equations with discontinuities. For a fixed number of CPU cycles, our approach can perform
much more accurate simulations than Algorithm #1, resulting in a significant reduction in numerical error; or much
larger simulations than Algorithm #2, resulting in a significant reduction in statistical error. This combination of
benefits should be of particular interest to the coarsening community, where very large ensembles must be simulated
as rapidly as possible, without too much numerical error. By providing high-order accuracy in O (N ) time, our
method should significantly enhance practitioners’ ability to conduct exactly this kind of simulation.
Although our algorithm was developed in the context of faceted surface evolution, it is not specific to that particular
application. The ordered nature of a collection of facets makes the neighbor structure easy to visualize, and is therefore
an ideal first application of the ideas. However, the algorithm should be applicable to any system of discontinuous
ODEs for which the right-hand side of the equation has a sparse neighbor structure, i.e, where the number of “neigh-
bors” of each element does not scale with the system size. For our demonstration problem, regardless of the number
of facets being considered, the velocity function of each facet depends only on two neighboring facets, clearly meeting
this requirement. However, many problems of physical interest can be described by systems of discontinuous ODEs
with only local, and therefore sparse, connectivity structures, and we anticipate that our approach will generalize to
such problems in a straightforward manner.
The system of Equations (5), although associated with a specific physical problem, is interesting primarily as a
simple model system in which the essential features of the algorithm could be clearly expressed. Future work will
include the extension to systems of broader general interest, each with its own specific complicating details. For
instance, the reduced ODE system associated with the Cahn-Hilliard equations of phase separation, written in the
form (3), have a second-nearest-neighbor structure [32, 33]; an analysis similar to that in Sec. 3.1 would reveal that
twice as many facets must be re-simulated per domain to retain solver-level accuracy. On the other hand, the reduced
ODE system associated with the convective Cahn-Hilliard equation, in Eq. (4), has a right hand side that diverges as
facets shrink to zero size [13, 8]; facets therefore exhibit a singular approach to zero, requiring more careful work
to obtain good estimates of the coarsening time. Finally, this method could also be extended to higher-dimensional
surfaces, with a wider variety of events to detect [24]. There, the complication would be that facets on such surfaces
no longer have a unique ordering, and so the concept of “neighbors” must be generalized. These are all tractable
extensions of the present work, but they shall not be pursued here.
Acknolwledgements. SAN thanks Daniel Reynolds and Larry Shampine for many helpful discussions. ST acknowl-
edges the support of an SMU Undergraduate Research Assistantship.
14
References
[1] J. Villain. Continuum models of crystal growth from atomic beams with and without desorption. Journal de
Physique I (France), 1:19–42, 1991.
[2] A. A. Golovin, S. H. Davis, and A. A. Nepomnyashchy. A convective Cahn-Hilliard model for the formation of
facets and corners in crystal growth. Physica D, 122:202–230, 1998.
[3] P. Politi, G. Grenet, A. Marty, A. Ponchet, and J. Villain. Instabilities in crystal growth by atomic or molecular
beams. Physics Reports, 324:271–404, 2000.
[4] T. V. Savina, A. A. Golovin, S. H. Davis, A. A. Nepomnyashchy, and P. W. Voorhees. Faceting of a growing
crystal surface by surface diffusion. Phys. Rev. E, 67:021606, 2003.
[5] A. van der Drift. Evolutionary selection, a principle governing growth orientation in vapor-deposited layers.
Philips Research Reports, 22:267–288, 1967.
[6] A. N. Kolmogorov. To the "geometric selection" of crystals. Dokl. Acad. Nauk. USSR, 65:681–684, 1940.
[7] M. E. Gurtin and P. W. Voorhees. On the effects of elastic stress on the motion of fully faceted interfaces. Acta
Materialia, 46(6):2103–2112, 1998.
[8] S. J. Watson, F. Otto, B. Y. Rubinstein, and S. H. Davis. Coarsening dynamics of the convective Cahn-Hilliard
equation. Physica D, 178(3-4):127–148, April 2003.
[9] S. A. Norris and S. J. Watson. Geometric simulation and surface statistics of coarsening faceted surfaces. Acta
Materialia, 55:6444–6452, 2007.
[10] S. A. Norris, S. H. Davis, P. W. Voorhees, and S. J. Watson. Faceted interfaces in directional solidification.
Journal of Crystal Growth, 310:414–427, 2008.
[11] L. Pfeiffer, S. Paine, G. H. Gilmer, W. van Saarloos, and K. W. West. Pattern formation resulting from faceted
growth in zone-melted thin films. Phys. Rev. Lett., 54(17):1944–1947, 1985.
[12] D. K. Shangguan and J. D. Hunt. Dynamical study of the pattern formation of faceted cellular array growth.
Journal of Crystal Growth, 96:856–870, 1989.
[13] C. L. Emmot and A. J. Bray. Coarsening dynamics of a one-dimensional driven Cahn-Hilliard system. Phys.
Rev. E, 54(5):4568–4575, 1996.
[14] C. Wild, N. Herres, and P. Koidl. Texture formation in polycrystalline diamond films. J. Appl. Phys., 68(3):973–
978, 1990.
[15] J. M. Thijssen, H. J.F. Knops, and A. J. Dammers. Dynamic scaling in polycrystalline growth. Phys. Rev. B,
45(15):8650–8656, 1992.
[16] Paritosh, D. J. Srolovitz, C. C. Battaile, and J. E. Butler. Simulation of faceted film growth in two dimensions:
Microstructure, morphology, and texture. Acta Materialia, 47(7):2269–2281, 1999.
[17] J. Zhang and J. B. Adams. FACET: a novel model of simulation and visualization of polycrystalline thin film