Adaptive PI Control of Bottom HolePressure during Oil Well Drilling
Jing Zhou ∗
∗ Department of Engineering Sciences, University of Agder, 4898Grimstad, Norway (e-mail: jing.zhou@ uia.no).
Abstract: In this paper, we studied the bottom hole pressure (BHP) control in an oil well duringdrilling. Today marginal wells with narrow pressure windows are frequently being drilled. Thisrequires accurate and precise control to balance the bottom hole pressure between the pore andfracture pressure of the reservoir. This paper presents three control schemes to stabilize the BHPprole, including proportional-integral(PI) control, PI with feed-forward control and adaptive PIwith feed-forward control. The proposed schemes are carried out through simulations on a high-fidelity hydraulic drilling simulator for flow rate changes and BHP set-point changes. In fastset-point changes and flow rate changes, the adaptive PI controller exhibits less tracking errorand less oscillations than the conventional PI solution. The simulation results illustrate theeffectiveness of proposed control schemes.
Keywords: PI control, adaptive control, oil well drilling, pressure control.
1. INTRODUCTION
Controlling the bottom hole pressure in an oil well is oneof the critical tasks during drilling. During well drilling,a drilling uid is pumped into the drill string topside andthrough the drill bit at the bottom hole of the well Merritt(1967); White (1999); Nygaard (2006). The mud thentransports cuttings in the annulus side of the well (i.e.in the well bore outside the drill string) up to the drill rig,where a choke valve and a back pressure pump is used tocontrol the annular pressure, see Figure 1 for a schematicoverview of the system.Today marginal wells with narrow pressure windows arefrequently being drilled. This requires accurate and precisecontrol to balance the BHP between the pore and fracturepressure of the reservoir. A stable well bore promotesefcient drilling and personnel safety. A destabilized wellbore can reduce or eliminate production. Too low a mudpressure can lead to a kick or well bore collapse and toohigh a mud pressure can create well bore fracturing andlosses. Preventing these costly stability problems requiresan accurate pressure control. Pressure control is a challeng-ing task during well drilling, due to the complex dynamicsof the multiphase ow potentially consisting of drilling mud,oil, gas and cuttings.The main objective is to precisely bottom hole pressureprole throughout the well bore continuously while drilling,i.e. to maintain the annular pressure in the well above thepore or collapse pressure and below the fracture or stickingpressure. Basically, this amounts to stabilizing the downhole annular pressure at a critical depth within its margins,i.e. either at a particular depth where the pressure marginsare small, or at the drill bit where conditions are the mostuncertain.Basic two strategies for closed-loop control of the chokeare used: indirect topside control and direct bottom holecontrol. The indirect topside control is that the bottom
qpump
qchoke
qback
Main pump
Annulus pump
Non
return
valve
Fig. 1. A simplified schematic drawing of the drillingsystem.
hole pressure is indirectly stabilized by applying feed-back control to stabilize the topside annulus pressureinstead, where the pressure set-point corresponding to adesired bottom hole pressure is calculated online usinga steady-state model. This strategy is the most commonand straightforward mainly due to the availability of highfrequency and robust topside pressure measurements. Thedirect BHP control is that the BHP at the critical depthis stabilized at a desired set-point directly. Even though aBHP measurement usually exists, an estimate of the pres-
Preprints of the 3rd IFAC Conference on Advances in Proportional-Integral-Derivative Control, Ghent, Belgium, May 9-11, 2018
sure is needed between samples because that the transferrate of the measurement is usually slow, or for additionalsafety because the sensor itself may be unreliable.
1.1 Managed Pressure Drilling
Recent experience indicates that in order to optimize thedrilling operation the entire drilling system, not just themechanics or software, needs to be designed from a con-trol system point of view. Automatic control of drillingoperations in a well can be a challenging task, due to thevery complex dynamics of the multiphase flow potentiallyconsisting of drilling mud, oil, gas and cuttings.Managed Pressure Drilling (MPD) Hannegan et al. (2004)is a technology that enables precisely control of the annularpressure during drilling and aims to prevent drilling relatedproblems. By allowing manipulation of the topside chokeand pumps, MPD provides a means of quickly affectingpressure to counteract disturbances, and several controlschemes are found in the literature. This is typicallyachieved through a closed, pressurized fluid system inwhich flow rate, mud density, and back pressure on thefluid returns (choke manifold) are used to set and controlthe BHP under both static and dynamic conditions. Con-trol of BHP during well drilling is a challenging task whenthere are disturbances and uncertainties in the drillingsystems.
1.2 Control Solutions
Manual control of the choke valve is commonly appliedin todays drilling operations. The control systems areoperated by the drilling crew, where the various inputs tothe drilling system are adjusted independently. Therefore,it is low reaction to changes in set-point and disturbances.State-of-the-art solutions typically employ conventionalPID control applied to the choke, using one of the abovestrategies PI controllers are relatively standard. PID con-trol is a powerful control method because of the simpleparameter tuning and limited requirements for knowledgeabout the process. PID control in the drilling processhas been studied in Godhavn (2009); Zhou and Nygaard(2010); Siahaan et al. (2014); Zhou et al. (2016). Themodel-based control for drilling operation has been studiedin Nygaard et al. (2007); Calsen et al. (2008); Zhou et al.(2008, 2009); Stamnes et al. (2009); Breyholtz et al. (2009);Zhou and Nygaard (2010); Zhou et al. (2011); Zhou andNygaard (2011); Kaasa et al. (2012). However, the model-based control method depends on the accuracy of thedeveloped drilling model and the complexity is increasedby the fact that a large set of parameters in such modelsare uncertain or unknown and possibly changing.For MPD, gain-scheduled PI control with feed forward forthe choke to control the BHP is a high performance con-troller in MPD operations. There are signicant drawbackswith both strategies. In both cases, the PI controller reliesheavily on integral action to balance the pressure dropcaused by friction, which is signicant, and the proportionalfeedback gain must be low to prevent generating pressurepulses by fast changes in the control input. As a result,the control system based on conventional PI control willreact slowly to fast pressure changes, which results from
movements of the drill string. Another drawback, is theuncertainty in the modeled bottom hole pressure, dueto uncertainties in the friction and mud compressibilityparameters in both the drill string and annulus. Typically,the model is calibrated by tuning these parameters to t themeasured BHP. This is typically a computation routinethat is initiated manually. There is signicant potential toimprove existing PI control algorithm.In this paper, we investigate three types of controllersfor BHP control in face of pipe connection and set-pointchanges. First control is standard PI control. The secondis the combination of PI control and feed-forward control.Then a methodology for adaptive PI is presented. Thecorresponding designs are based on using only the trackingerror, its derivative, its integral, and the current valueof the adaptive gains in order to update the PI gains.The conventional independent parallel realization, whichmost existing adaptive designs have used, yields a linearlyparametrized adaptive control problem. Case study simu-lations are provided to demonstrate the capabilities of theproposed algorithms.
2. PRSSURE CONTROL DESIGN
In this section, the automatic control method is described,where a PI control, a PI with feed-forward control, andan adaptive PI with feed-forward control are applied. Byusing back pressure MPD, the choke valve opening is con-trolled using the proposed control methods while the mainpump flow and the back pressure pump flow are manuallyoperated. The proposed control schemes can be describedby the structure in Figure 2, where the feedback con-troller calculates an error value as the difference betweena measured process variable and a desired set-point. Thecontroller attempts to minimize the error by adjusting theprocess by use of a manipulated variable and compensatethe effects of the disturbance. The disturbance consists ofknown and unknown disturbances, for example, the flowchange through the main pump during pipe connection isregarded as the measured disturbance to the process.
Feedforward
Controller
Feedback
ControllerProcess
Distrubance
Set-point
+
-
+
+
Fig. 2. Control structure
2.1 PI Control
PI control is a powerful control method because of the sim-ple parameter tuning and limited requirements for knowl-edge about the process. In this section, a conventional PIcontrol is used.
Preprints of the 3rd IFAC Conference on Advances in Proportional-Integral-Derivative Control, Ghent, Belgium, May 9-11, 2018
167
u = uPI = −KP e−KI
∫edτ (1)
where KP > 0 and KI > 0 are tuning gains for PI control.The variable e is defined as the mismatch between thecontrolled BHP y and the desired set-point yset, such ase(t) = y(t)− yset. The PI controller can drive the controlvariable to approach its set-point without any modelneeded in the computation in the controller provided thePI parameters KP and KI are tuned well.
2.2 PI and Feed-Forward Control Scheme
Combination of feed-forward and feedback control gives abetter performance compared to individual use of feedbackcontrol. Such a control can be expressed as
u= uPI + uff (2)
uff =Kffωff (3)
where Kff > 0 is a tuning gain for feed-forward controland ωff denotes a feed-forward function.
2.3 Adaptive PI and Feed-Forward Control
Adaptive PI control is one approach to improve the robust-ness and autonomy of PI controllers as well as capture theessence of adaptive control theory within a simple archi-tecture. Numerous publications in the control communityhave considered this problem. In this section, an adaptivePI control uaPI is expressed as
uaPI = KP e+ KI
∫edτ (4)
where KP and KI are the adaptive proportional gain andadaptive integral gain. These adaptive gains are updatedby using the following adaptation laws:
˙KP =−γP e
2 (5)
˙KI =−γIe
∫edτ (6)
where γP > 0 and γI > 0 are the adaptation gains forproportional and integral gains. The adaptive PI controlis achieved by utilizing only the feedback tracking errorand its integral as driving signals as well as the currentgain values to adjust the adaptive gains.The combination of adaptive PI and feed-forward controlcan be expressed as
u = uPI + uff + uaPI (7)
2.4 Stability analysis
Consider the following first order system
ay = −by + u (8)
where y is the output, u is the input, a > 0 is an unknownparameter and b > 0 is a known parameter. In severalarticles Godhavn (2009); Zhou et al. (2008); Kaasa et al.(2012), the pressure dynamics was modeled by a first-orderdifferential equation as (8).From (4) and (7), the derivative of e = y− yset is given as
ae=−by + uPI + uff + uaPI
=−by −KP e−Ki
∫edτ +Kffωff
+KP e+ KI
∫edτ
=−KP e−Ki
∫edτ − be− byset
+KTffωff + KP e+ KI
∫edτ
=−be−KP e−Ki
∫edτ + KP e+ KI
∫edτ (9)
where Kff = b, and ωff = yset.Consider the following Lyapunov function:
V =1
2ae2 +
1
2Ki
(∫edτ
)2
+1
2γPK2
p +1
2γIK2
I (10)
Using (5) and (6), its derivative is obtained as
V = e(−KP e−Ki
∫edτ − be+ KP e+ KI
∫edτ)
+Kie
(∫edτ
)+
1
γPKp
˙KP +
1
γIKI
˙KI
=−(KP + b)e2 +1
γPKp(
˙KP + γP e
2)
+1
γIKI(
˙KI + γIe
∫edτ)
=−(KP + b)e2 ≤ 0 (11)
which shows that V is globally bounded. Thus the sig-nals e(t),
∫edτ , KP , and KI are bounded. It further
implies that the tracking error e(t) converges to zero aslimt→∞ e(t) = 0 by using LaSalle-Yoshizawa theorem inKhalil (2002).
3. CASE STUDIES
In this section, two case studies will be used to demon-strate the proposed methodologies in face of uncertaintiesand disturbances. The control objective is to control thebottom hole pressure at the desired set point when themain pump is shuttled down and then started up duringthe pipe connection and set-point changes. The controlvariable u is the choke opening. The tuning rules for PIcontrol gains are MIT in Rifai (2009). Large value of(KP ,KI) gives the fast speed of response and good dis-turbance rejection and small value gives good robustnessto time delay and uncertainties. The gain for feed-forwardcontrol is chosen by trial and error. The adaptive gains areupdated by using the following adaptation laws.Simulations are carried out using a high fidelity drillingsimulator developed by the International Research In-stitute of Stavanger Lage et al. (2000). Throughout thesimulations, the aim of controller is to maintain the BHParound the desired BHP in two cases. The first case isthe BHP control during pipe connection. The second caseis the BHP stabilization during set-point changes. Thiscan be a challenge for drilling in formation with very
Preprints of the 3rd IFAC Conference on Advances in Proportional-Integral-Derivative Control, Ghent, Belgium, May 9-11, 2018
168
tight margin between pore pressure and fracture pressure.The proposed PI control, PI with feed-forward control andadaptive PI and feed-forward control are evaluated for twocases in face of time-delay in the BHP measurement. Thecases are related to a well being drilled recently in theNorth Sea. The well bore configuration is given in Table1.
Table 1: Well bore Configuration in Drilling Simulator
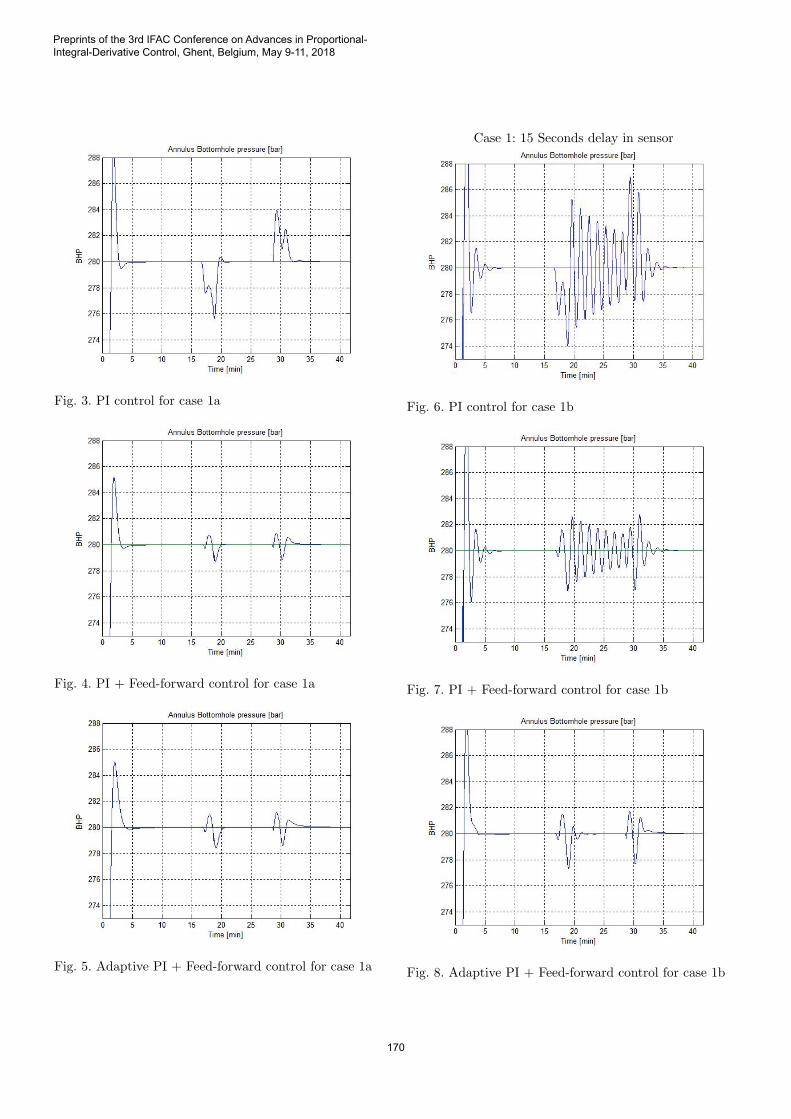
3.1 Case 1- BHP control during pipe connection
In the first case, the objective is to control BHP at thedesire set-point 280 bar during pipe connection, whilethe main pump is shuttled down and opened again. Case1a is when there is 5 seconds time-delay in the BHPmeasurement and case 1b is when there is 15 seconds time-delay in the BHP measurement. Figures 3-5 and Figures6-8 show the BHP with PI control, PI with feed-forwardcontrol, and adaptive PI with feed-forward control forcase 1a and case 1b. separately. In this case, the controlparameters are set asKP = −2.5×10−3,KI = −8.3×10−5
and Kff = 7.3−5 and the adaptation gains are set asγp = 1× 10−9 and γI = 3× 10−12, the disturbance is thechange of the flow rate through the main pump qpump.
3.2 Case 2- BHP control during set-point changes
In the second case, the desired set-point for BHP ischanged and the aim of controller is to maintain the BHPat the desired set-point. Figures 9-11 show the bottomhole pressure with PI control, PI and feed-forward, andadaptive PI with feed-forward control when there is 10seconds time-delay in the BHP measurement. In this case,the control parameters are set as KP = −2.5 × 10−3,KI = −8.3 × 10−5 and Kff = 5.0−6 and the adaptationgains are set as γp = 1.0× 10−9 and γI = 3.0× 10−12, thedisturbance is the change of the set-point pressure.
3.3 Results
In conclusion of simulation results, PI control is not goodwhen the measurement has time delays. PI+feed-forwardcontrol improves the performance when there is 5 seconddelay in the BHP, but it is not good when the delay is15 second. Adaptive PI+feed-forward control gives thebest performance when there is time-delay in the BHPmeasurement. The amplitude and frequency of oscillationdue to delay in BHP are reduced within the acceptanceregion. The simulation results show that the combinationof adaptive PI and feed-forward is robust to the delays inBHP measurements and gives the best performance whenthere is time-delay in the measurement.
4. CONCLUSION
In this paper, we investigate the robustness of three typesof controllers for BHP control during well drilling, includ-ing PI control, PI with feed-forward control and adap-tive PI with feed-forward control. The proposed controlschemes are designed to stabilize the bottom hole pressureand achieve the asymptotic tracking. The simulation re-sults are evaluated in a high-fidelity drilling simulator andillustrate the effectiveness of proposed control schemes.Case study simulations show that the adaptive PI withfeed-forward control are able to improve control perfor-mance in face of uncertainties and time-delays.
REFERENCES
Breyholtz, Ø., Nygaard, G., and Nikolaou, M. (2009).Advanced automatic control or dual-gradient drilling.In SPE Annual Technical Conference and Exhibition,SPE 124631. New Orleans, Louisiana, USA.
Calsen, L.A., Gerhard, N., Gravdal, J., Nikolaou, M., andSchubert, J. (2008). Performing the dynamic shut-inprocedure because of a kick incident when using auto-matic coordinate control of pump rates and choke-valveopening. In SPE/IADC Managed Pressure Drilling andUnderbalanced Operations Conference and Exhibition,SPE/IADC-113693MS. Abu Dhabi, UAE.
Godhavn, J.M. (2009). Control requirements for high-end automatic mpd operations. In SPE/IADC DrillingConference and Exhibition, SPE 119442. Amsterdam,Netherlands.
Hannegan, D., Todd, R.J., Pritchard, D.M., and Jonasson,B. (2004). MPD uniquely applicable to methane hy-drate drilling. In SPE/IADC Underbalanced TechnologyConference and Exhibition, SPE91560. Houston, Texas,U.S.A.
Kaasa, G.O., Stamnes, O.N., Aamo, O., and Imsland, L.(2012). Simplified hydraulics model used for intelligentestimation of downhole pressure for a managed-pressure-drilling control system. SPE Drilling and Completion,SPE-143097-PA, 27, 127–138.
Khalil, H.K. (2002). Nonlinear Systems. 3rd edition,Prentice Hall, U.S.
Lage, A., Fjelde, K., and Time, R. (2000). Underbalanceddrilling dynamics: Two-phase flow modeling and experi-ments. In IADC/SPE Asia Pacific Drilling Technology,SPE -62743-MS. Kuala Lumpur, Malaysia.
Merritt, H.E. (1967). Hydraulic Control Systems. JohnWiley & Sons, U.S.
Nygaard, G. (2006). Multivariable process control inhigh temperature and high pressure environment usingnon-intrusive multi sensor data fusion. PhD Thesis,Norwegian University of Science and Technology.
Nygaard, G., Johannessen, E., Gravdal, J.E., and Iversen,F. (2007). Automatic coordinated control of pump ratesand choke valve for compensating pressure fluctuationsduring surge and swab operations. In IADC/SPE Man-aged Pressure Drilling and Underbalanced OperationsConference and Exhibition, SPE 108344. Galveston,Texas, U.S.A.
Rifai, K. (2009). Nonlinearly parameterized adaptive pidcontrol for parallel and series realizations. In AmericanControl Conference, 5150–5155. St. Louis, USA.
Preprints of the 3rd IFAC Conference on Advances in Proportional-Integral-Derivative Control, Ghent, Belgium, May 9-11, 2018
169
Fig. 3. PI control for case 1a
Fig. 4. PI + Feed-forward control for case 1a
Fig. 5. Adaptive PI + Feed-forward control for case 1a
Case 1: 15 Seconds delay in sensor
Fig. 6. PI control for case 1b
Fig. 7. PI + Feed-forward control for case 1b
Fig. 8. Adaptive PI + Feed-forward control for case 1b
Preprints of the 3rd IFAC Conference on Advances in Proportional-Integral-Derivative Control, Ghent, Belgium, May 9-11, 2018
170
Fig. 9. PI control for case 2
Fig. 10. PI + Feed-forward control for case 2
Fig. 11. Adaptive PI + Feed-forward control for case 2
Siahaan, H.B., Bjrkevoll, K.S., and Gravdal, J.E. (2014).Possibilities of using wired drill pipe telemetry duringmanaged pressure drilling in extended reach wells. InSPE Intelligent Energy Conference and Exhibition, SPE167856. Utrecht, Netherlands.
Stamnes, Ø.N., Zhou, J., Kaasa, G.O., and Aamo, O.M.(2009). Adaptive observer design for nonlinear systemswith parametric uncertainties in unmeasured state dy-namics. In Proceedings of the 48th IEEE Conference on
Decision and Control.White, F.M. (1999). Fluid Mechanics, 4th edition.
McGraw-Hill Int, Boston, USA.Zhou, J., Gravdal, J., Strand, P., and Hovland, S. (2016).
Automated kick control procedure for an influx in man-aged pressure drilling operations by utilizing pwd. Jour-nal of Modeling, Identification and Control, 37, 3140.
Zhou, J. and Nygaard, G. (2010). Control and estimationof downhole pressure in managed pressure drilling opera-tions. In Proceedings of the 4th International Symposiumon Communications, Control and Signal Processing. Li-massal, Cyrpus.
Zhou, J., Stamnes, O.N., Aamo, O.M., and Kaasa, G.O.(2008). Adaptive output feedback control of a managedpressure drilling system. In Proceedings of the 47thIEEE Conference on Decision and Control, 3008–3013.Cancun, Mexico.
Zhou, J., Stamnes, Ø.N., Aamo, O.M., and Kaasa, G.O.(2009). Pressure regulation with kick attenuation in amanaged pressure drilling system. In Proceedings ofthe 48th IEEE Conference on Decision and Control.Shanghai, China.
Zhou, J., Stamnes, Ø.N., Aamo, O.M., and Kaasa, G.O.(2011). Switched control for pressure regulation andkick attenuation in a managed pressure drilling system.IEEE Transactions on Control Systems Technology, 19,337–350.
Zhou, J. and Nygaard, G. (2011). Automatic model-based control scheme for stabilizing pressure during dualgradient drilling. Journal of Process Control, 21, 1138–1147.
Preprints of the 3rd IFAC Conference on Advances in Proportional-Integral-Derivative Control, Ghent, Belgium, May 9-11, 2018