38
| Date post: | 02-Jan-2016 |
| Category: |
Documents |
| Upload: | chester-hunt |
| View: | 213 times |
| Download: | 0 times |

Administrative Introduction
• Our goals for this project are for the three robots to work together intelligently to complete a maze faster than an individual robot would be able to.
• Not only did we want a cost effective robot we wanted to make the whole process of an autonomous robot solving a maze more efficient and faster.

Project Goals• To build 3 robots that work together to navigate a maze
• The robots must communicate wirelessly and analyze information intelligently
• The robots must use each other’s information to gain information on how to solve the maze
• The robots should be able to figure out where and how far the walls are from them and record which routes have been taken to learn the maze
• We want it to seem as if each robot can see through the other two robots eyes and as if they were working with one mind

Specifications and Requirements
• 3 robots that communicate through a wireless connection• The base of the vehicle should be able to rotate 360°• The code should execute immediately and the robots
should not pause longer than 10s • Robots should be able to measure their distance from the
wall to a degree of error not greater than 4 cm• Robots should be able to store maze information and send
it• The robot should be able to identify dead ends in no more
than 5s• Each robot should cost less than $150 to construct

System Design DiagramSystem Design Diagram

Microcontroller Choices

Microcontroller – Arduino Duemilnaove
• ATMEGA328
• USB Interface
• Cross-platform
• Open source
• 32 KB Flash Memory
• Well documented
Printed Circuit Board
• PCB123 software
• $100 student credit from sunstone
• Prototyped on the Arduino board
• 2 layer design
• Using through hole and surface mount techniques

Batteries
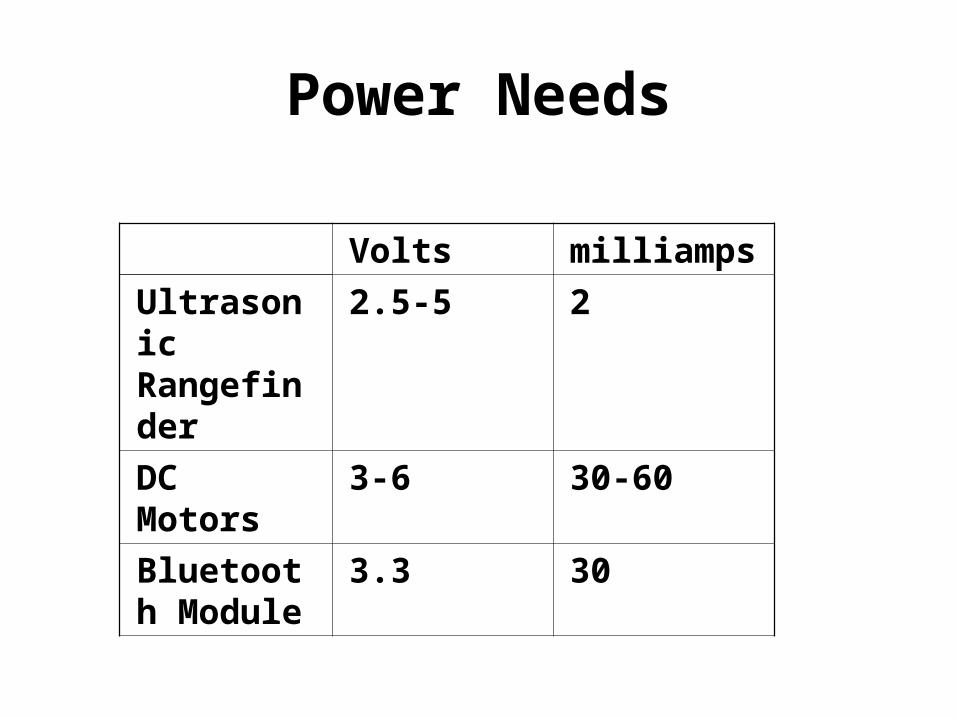
Power Needs
Volts milliamps
Ultrasonic Rangefinder
2.5-5 2
DC Motors 3-6 30-60
Bluetooth Module
3.3 30

Voltage Regulation
• All parts can run off of 5 volts DC
• Stepping Down 7.4 volt battery
• LM317 regulator-adjustable output with two external resistors

H-Bridge
• The SN754410 Quad Half H-Bridge
• Capable of driving high voltage motors using TTL 5V logic levels
• Can drive 4.5V up to 36V at 1A continuous output current
Texas Instruments Voltage Regulator Advantages
• 3 Terminal Regulator
• High Power Dissipation Capability
• Output Current up to 1.5 Amps
• Internal Short Circuit Current Limiting
• Input Voltages up to 40 V

Testing
• DC Motor/H-Bridge wheels test
• Chassis/Locomotion test with wheels turning on axis
• Rangefinder test
• Bluetooth test

Base Vehicle• In deciding the body of the autonomous
robot a number of concerns came into play.
• The robot needs to be sturdy yet lightweight in order to mount all the additional parts
• The robot must be able to turn on a dime and navigate corners in order to travel the maze effectively
• The platform of the robot should be a disc like shape

Base Vehicle
• Frame of vehicle
• Motor
• Navigational system

Frame of Vehicle• The considered materials for this robot was
polycarbonate plastic and aluminum
• The final choice was the plastic
• light weight
• Easy to use
• Cost effective

Servos
• DC Motors
• RC Motors
• Stepper Motors
• For our robot a dc motor was
chosen

Navigational system
• The navigational system we look at was
• Two wheel
• Three wheel
• Four wheel
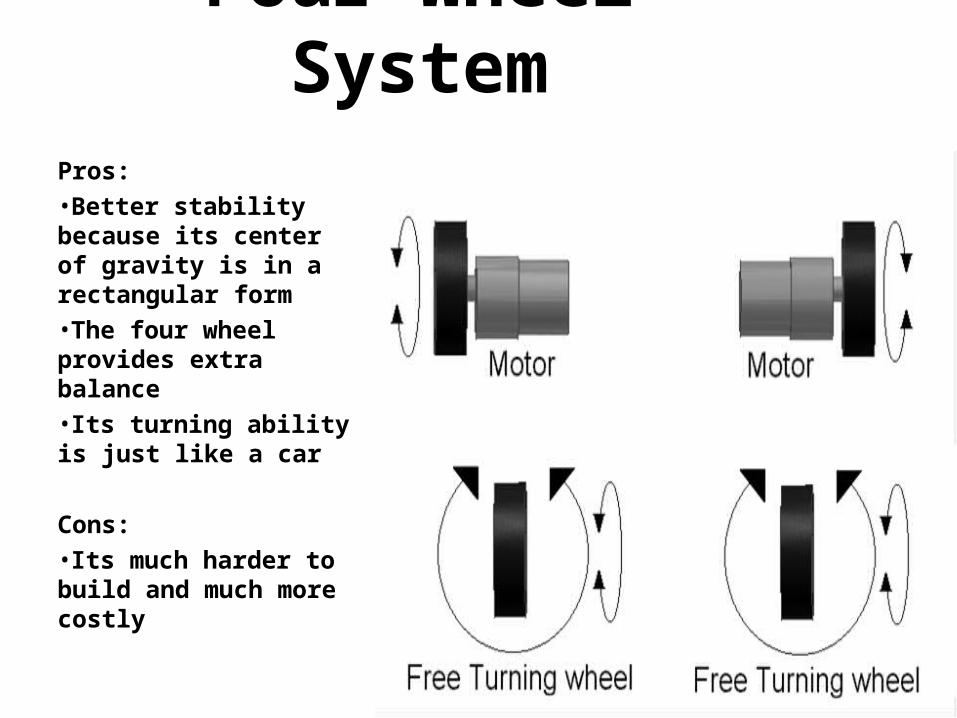
Four Wheel SystemPros:
•Better stability because its center of gravity is in a rectangular form
•The four wheel provides extra balance
•Its turning ability is just like a car
Cons:
•Its much harder to build and much more costly

Three Wheel SystemPros:
•Greater accuracy when fast turns are required
Cons:
•Center of gravity is in a triangular shape which makes it very easy to fall
•Does not perform well on any form of rough terrain
•Not as efficient or cost effective
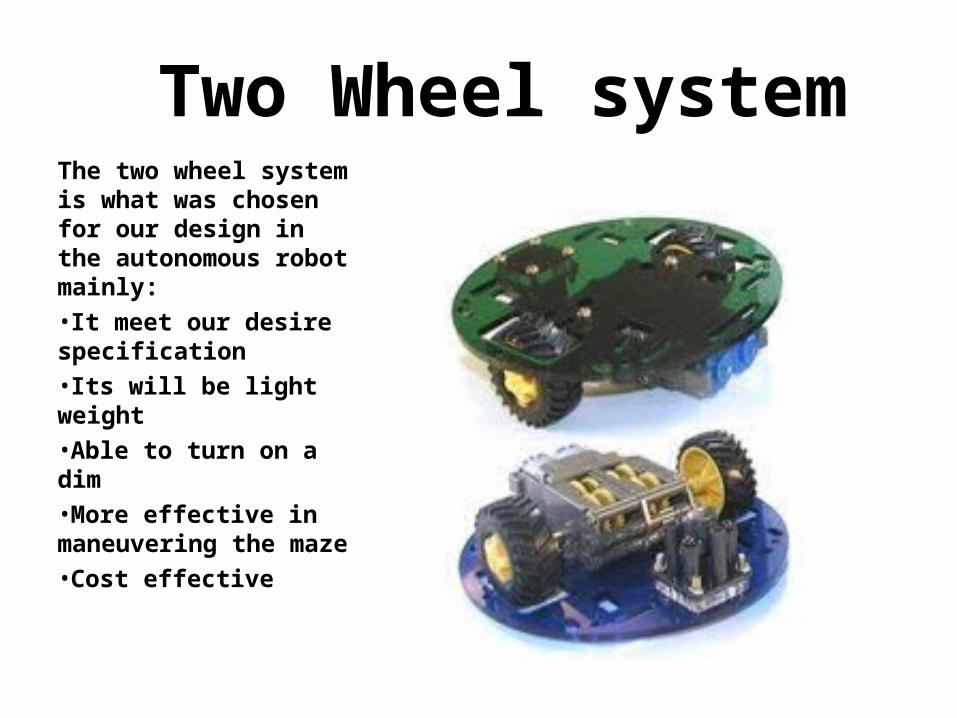
Two Wheel systemThe two wheel system is what was chosen for our design in the autonomous robot mainly:
•It meet our desire specification
•Its will be light weight
•Able to turn on a dim
•More effective in maneuvering the maze
•Cost effective

Labyrinth

Simply Connected Maze
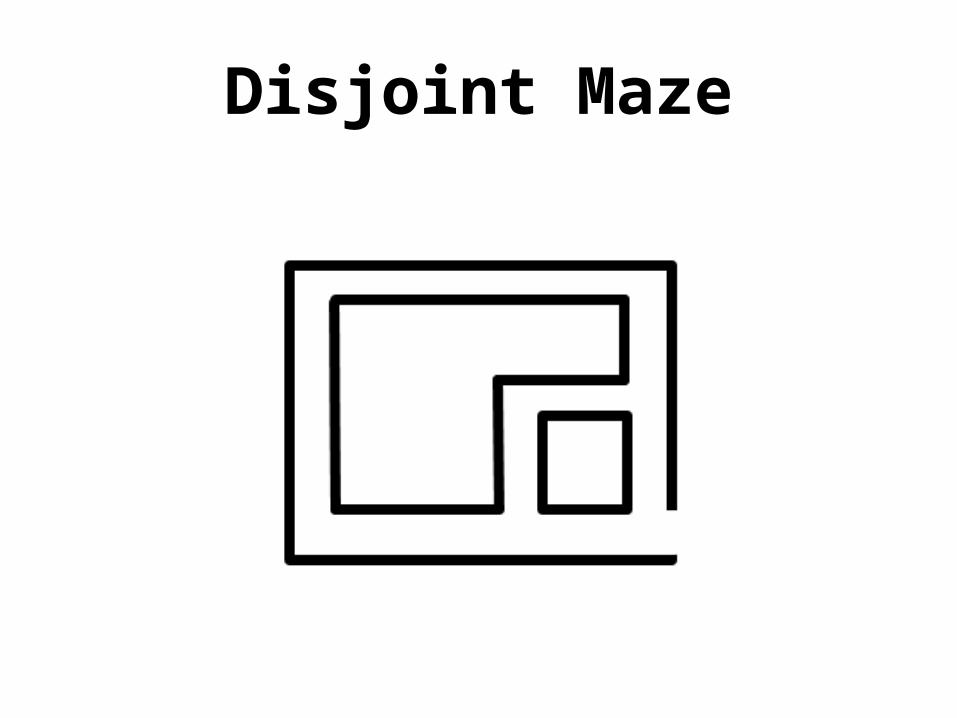
Disjoint Maze
Tremaux's Algorithm•If you encounter a new junction:
Pick a direction at random
•If you are traversing a new path and you encounter an old junction:
Turn back
•If you are traversing an old path and you encounter a old junction:
Take a new path if available, otherwise take an old path
•If you encounter a dead end:
Turn back

Graphs

Mazes as Graphs

Mazes as Graphs
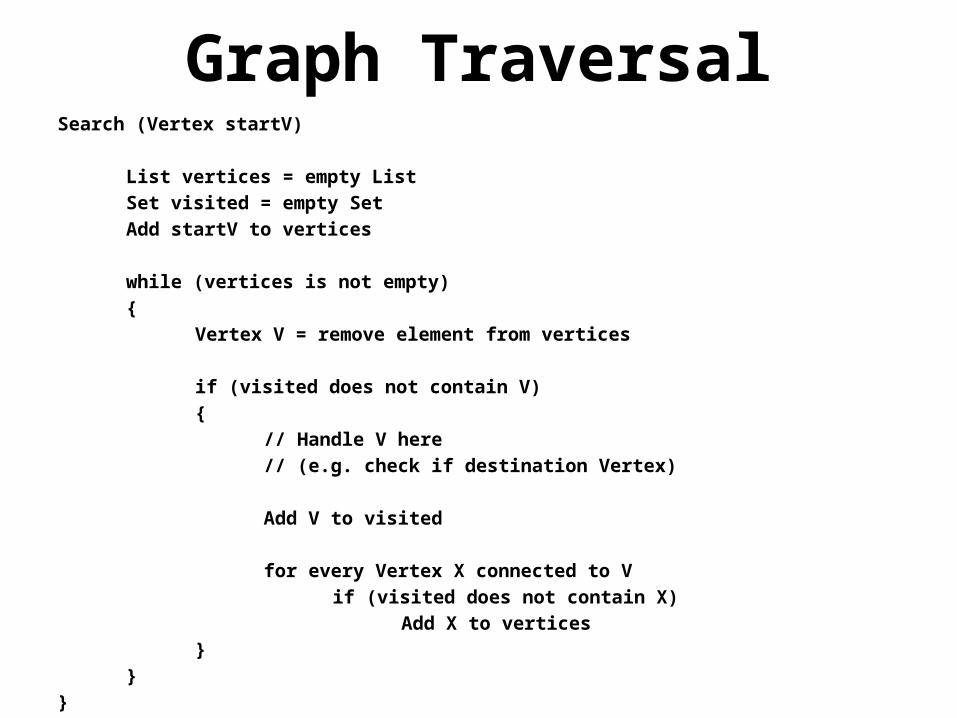
Graph TraversalSearch (Vertex startV)
List vertices = empty List
Set visited = empty Set
Add startV to vertices
while (vertices is not empty)
{
Vertex V = remove element from vertices
if (visited does not contain V)
{
// Handle V here
// (e.g. check if destination Vertex)
Add V to visited
for every Vertex X connected to V
if (visited does not contain X)
Add X to vertices
}
}
}

Constructing the Maze

Bluetooth Successes and Difficulties
• Successes– Maximum distance is up
to 100m– Has an indicator LED– Supports Windows
Bluetooth stack– Windows automatically
links with Bluetooth
• Difficulties– None to date

SeedStudio Ultrasonic Range Finder Successes
• Successes– Breadboard friendly– Arduino library ready– The size is light weight – Wide range from 3 cm –
400 cm

SeedStudio Ultrasonic Range Finder Difficulties
• Difficulties– Efficient communication
between the micro-controller– Best if used in a 30°
Practical test of performance, Best in 30 degree angle
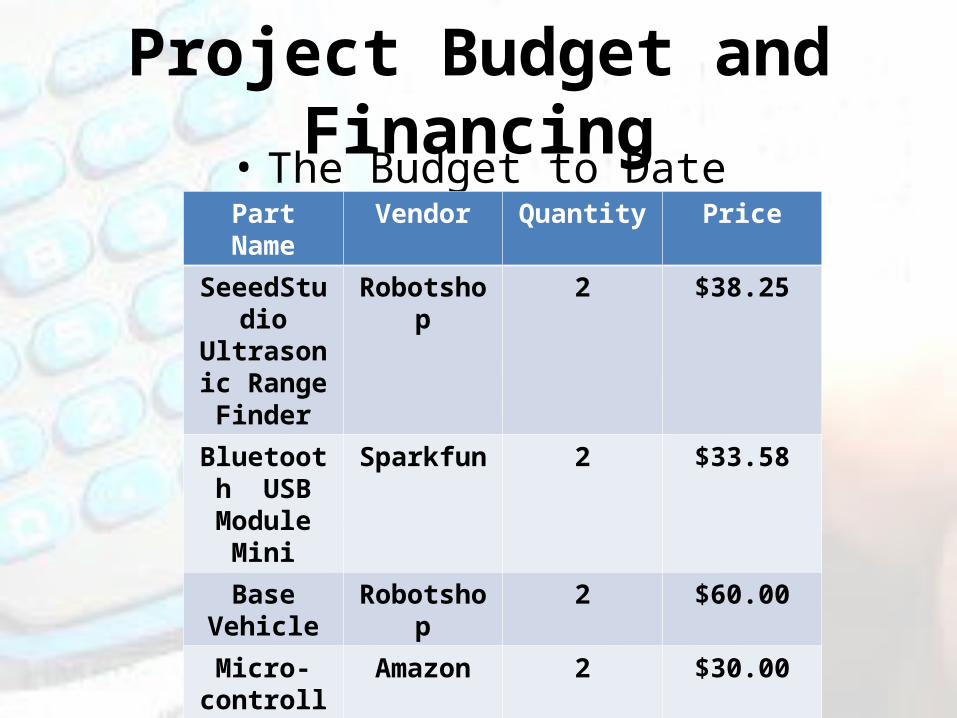
Project Budget and Financing• The Budget to Date
Part Name Vendor Quantity Price
SeeedStudio Ultrasonic
Range Finder
Robotshop 2 $38.25
Bluetooth USB
Module Mini
Sparkfun 2 $33.58
Base Vehicle
Robotshop 2 $60.00
Micro-controller
Amazon 2 $30.00
Total 161.83

Project Budget and Financing• The Budget to the End of the Project
Part Name Vendor Quantity Price
SeeedStudio Ultrasonic
Range Finder
Robotshop 3 $53.25
Bluetooth USB
Module Mini
Sparkfun 3 $44.58
Base Vehicle
Robotshop 3 $80.00
Micro-controller
Amazon 3 $50.00
Total $227.83

Current Progress• Research
– 100% done• Design
– 95% of the design is done• Parts Acquisition
– 80% complete• Prototyping
– 20% complete• Testing
– 10% complete• Overall
– 25% complete

Questions?

















