American Institute of Aeronautics and Astronautics
1
Particle Filter Based Matching Pursuit Decomposition for Damage Quantification in Composite Structures
Santanu Das* and Ioannis Kyriakides†
Arizona State University,Tempe, AZ 85287-6106
Aditi Chattopadhyay‡ Arizona State University,Tempe, AZ 85287-6106
and
Antonia Papandreou-Suppappola§
Arizona State University,Tempe, AZ 85287-6106
In structural health monitoring, the fundamental goal is to address the problem of damage identification, localization and quantification. Using the wave based approach, the presence of damage is visualized in terms of the changes in the signature of the resultant wave that propagates through the structure. Surface mounted piezoelectric transducers have been used for monitoring. The voltage output of each sensor is used for signature characterization. Due to the time-varying nature of these signals, performance of some existing analyzing tools may not be satisfactory. The present research demonstrates the use of the matching pursuit decomposition as a signal processing technique to compare signals from healthy and damaged structures. The developed methodology is based on the localized analysis of waveforms obtained from damaged structures using “matching pursuit decomposition (MPD)” technique and time-frequency representations (TFR), with a broader view of damage quantification. However the matching pursuit method uses a dictionary that is large enough to decompose the signal. The major drawback of using such a large dictionary is the computational expense that limits the use of matching pursuits in real applications. Therefore, the availability of a smaller dictionary, able to adapt to the specific signal to be decomposed, would combine the generality of the original matching pursuit with execution speed. In this paper, we use the particle filter matching pursuit decomposition (PFMPD) algorithm to estimate the matching pursuit dictionary that is suited to the structure of the waveform to be decomposed. The proposed algorithm, sequentially estimates a dictionary that contains only those components that match the waveform structure, uses the matching pursuits for the decomposition of the signal and, if necessary, adapts the dictionary to the structure of the resulting residues for further decomposition. Finally we demonstrate using real life data that the particle filtering matching pursuit retains the ability of the matching pursuit to decompose waveforms and quantify them accurately while reducing computational expense.
Nomenclature x = test signal y = atom state vector N = total number of dictionary elements n = nth dictionary elements K = total number of iterations k = MPD iteration index i = PFMPD iteration index
* Student, Dept. of Mechanical and Aerospace Engineering, Arizona State University and student member. † Student, Dept. of Electrical Engineering, Arizona State University. ‡ Professor, Dept. of Mechanical and Aerospace Engineering Arizona State University and Fellow. § Associate Professor, Dept. of Electrical Engineering, Arizona State University.
47th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Confere1 - 4 May 2006, Newport, Rhode Island
American Institute of Aeronautics and Astronautics
2
α = dilation or scaling factor β = translation factor κ = modulation factor v = uniformly distributed random variable Rp = fraction of residue
I. Introduction
HIGH performance, light-weight composites are increasingly being used in applications ranging from aerospace,
automobile, weapons and mechanical systems. Composite laminates offer superior strength and stiffness over conventional materials for a given mass but exhibit various types of damages such as delaminations, transverse matrix cracking, fiber fracture, matrix cracking etc. Either one or combinations of these forms of damage may nucleate when the composite is subjected to fatigue, over-loading, low-velocity impact or under various test cases of drilled holes, notches, saw-cut and laminate stacking sequence mismatch. The assurance of structural reliability is a critical issue because a damage event will compromise the integrity of composite structures and lead to ultimate failure. An important aspect in achieving reliable systems is a strong capability of inspecting and assessing the physical condition of critical damage components. Hence, it is important to obtain a thorough understanding of the effects of these damages on composite structures and develop suitable techniques to detect them. A comprehensive literature review of structural health monitoring (SHM) techniques can be found in Ref. 1. Among many non-destructive evaluation (NDE) techniques, damage detection using wave propagation and scattering is of considerable interest. However, in the case of fiber-reinforced composites, the wave propagation is more complicated than in the isotropic medium due to the discontinuity in material properties. In wave based approach, the presence of damage is visualized in terms of the changes in the signature of the resultant wave that propagates through the structure. In the present research, surface mounted piezoelectric transducers are used for monitoring purpose and the voltage output of each sensor is used for damage characterization. A methodology is developed to automatically analyze the time domain signals from delaminated structures and predict the location and size of damage in composite laminates. This has been accomplished by decomposing the signal in terms of its components and finally the time-of-flight information of these individual components are used to determine the location and size of the damage. The assessment of damage size and location is based on the mutual information shared by the neighboring transducer sets.
A distinct feature of nonlinear systems is a frequency component from the generated harmonic response that is different from the harmonic excitation frequency. When a localized damage is induced in the structure, these distinct feature components are sensed by the neighboring transducers. Extracting the featured components with suitable signal processing techniques is a major task in structural health monitoring. The obtained sensor signal can be represented in many different ways. In order to extract useful information, the popular way of characterizing a signal is to represent it either in the time domain or in the frequency domain. The time domain representation of a signal provides the variations of the signal energy distribution across different time instances. Often, a signal from one domain is transformed to another domain to obtain more information about the signal that is otherwise inaccessible. In order to obtain the frequency content of a signal, the time domain signal is transformed to the frequency domain using the Fourier transform. However, the frequency domain representation of a signal does not provide us with the time-localized frequency content of the signal. Hence, for time-varying signals (i.e. signals whose frequency varies with time), the Fourier transform will not provide this time-varying frequency information. Moreover, in real applications, the presence of relatively high background vibration (low frequency noise) may not yield satisfactory information when only frequency domain analysis is used. Extensive research has been conducted and various techniques5, 6, 19, 22, 26, 30, 38 have been proposed by several others to achieve more sensitive damage detection techniques. The most popular methods include cepstrum analysis, envelope detection and high frequency resonance, time-domain averaging, kurtosis and crest factor analysis. Most of these analysis techniques yield good results in some applications but implementation of these techniques in structural health monitoring may be limited as they require the use of specific frequency bands and assume that the signal is not time-varying.
Time-varying signals are best represented in the time-frequency domain to obtain time-varying frequency information. In order to analyze the time-varying sensor response effectively, the time and frequency domain characteristics must be considered jointly. These joint time-frequency representations (TFRs) 16, 35 characterize a given signal over the time-frequency (TF) plane by combining the time and frequency domain information to yield more revealing information about the temporal localization of a signal’s spectral components. TFRs such as the
American Institute of Aeronautics and Astronautics
3
wavelet transform, short-time Fourier transform and bilinear time-frequency distributions such as the Wigner distribution and the spectrogram have been shown to provide the time-dependent frequency composition of a signal over the entire spectrum, and are particularly useful to detect localized changes in a signal. A comprehensive literature review of damage detection and health monitoring methods for structural and mechanical systems was provided by Doebling, et al17 and Chang 14-15. A brief summary of the application of wavelet analysis for structural health monitoring and damage detection is referred by Hou and Noori23. Wang and Harrap42 compared the performance of the Fourier transform, short-time Fourier transform, pseudo-Wigner distribution and cone kernel distributions. Review of previous studies indicated that the Wigner distribution suffers from the presence of cross terms whereas the spectrogram suffers from poor time and frequency resolution. However, a good concentration of signal components without cross terms is necessary to correctly interpret the time-frequency representation outcome for damage detection analysis. The matching pursuit28 is a time-frequency based technique that decomposes a signal into highly localized time-frequency atoms and can provide a highly concentrated TFR. Recently, the matching pursuit decomposition has received considerable attention in multi-disciplinary areas32, 41, 45. Liu et al.27 investigated the bearing failure detection using matching pursuit decomposition and analyzed the bearing vibration to extract signature components related to bearing failure. Ebenezer et al20 used modified matching pursuit decomposition for classification of acoustic emissions in order to detect faults in structures.
II. Objectives The objective of this research is to develop a robust method for damage quantification using “matching pursuit
decomposition (MPD)” technique. However, if the waveform structure is not well known, there is a need for the MP to use a comprehensive dictionary to guarantee an accurate decomposition of the waveform. This results to a large computational burden that for real applications, it causes delays and the need of processing power. The particle filter matching pursuit (PFMP) method reduces the size of the dictionary to be used by the MP by adapting it to the characteristics of the waveform to be decomposed. The particle filter 2 has the ability to estimate parameters that characterize the waveform structure and its use enables the creation of a dynamic dictionary that adapts to this structure. Moreover, if necessary, the dictionary adapts to the residues resulting from the matching pursuit iterations, is components of the original signal have not been included in the initial dictionary.
In this paper, we use the particle filtering method to create an agile dictionary by estimating the time shifts, frequency shifts and scaling factors of the atoms that match the characteristics of the waveform that is to be decomposed. Particle filtering, a sequential Monte Carlo method that uses Bayesian inference, has been successfully used in the estimation of components of multidimensional nonlinear systems, utilizing different kinds of information. An example of such state space estimation is multiple target tracking 33. In the application of particle filtering in this paper, the objective is to estimate the parameters of atoms that form the MP dictionary given a signal to be decomposed and its resulting residues from the MP iterations. This results to a compact dynamically changing dictionary that adapts to the signal and its residues and enables the MP to accurately and rapidly decompose a given waveform.
III. Matching Pursuit Decomposition Algorithm
The matching pursuit is an iterative nonlinear algorithm that decomposes any signal into a linear expansion of waveforms that belong to a redundant dictionary16, 28, 35, 36. The dictionary of the matching pursuit decomposition (MPD) consists of a collection of TF atoms which are the dilated (time-scaled), translated (time-shifted) and modulated (frequency-shifted) versions of a single basic atom. The basic atom is often chosen to be a Gaussian signal as Gaussian signals are the most concentrated signals in both time and frequency. A signal’s localization in time and frequency may vary widely (linearly or nonlinearly) and as a result, signal adaptive decomposition is necessary. The signal must be expanded into waveforms whose TF properties are adapted to its local structures. Thus a modified version of the matching pursuit decomposition uses a dictionary that is formed using TF atoms that are matched to the analysis signal35, 36. Although this iterative method is nonlinear in nature, it preserves signal energy due to its use of orthogonal expansions and thus guaranties convergence28.
American Institute of Aeronautics and Astronautics
4
In the following, the main steps of the MPD algorithm are described briefly. Let d(t) be the basic TF atom and
the thn dictionary element dn(t), n=1,…,N, is formed by changing ,α ,β κ from the following as:
tj
n
n
n
net
d πκ
αβ
α2
n
1 )(t d ��
�
����
� −= (1)
where n is the total number of dictionary elements. The redundant dictionary covers the entire TF plane, spanned by these time-scaled, time-shifted and frequency-shifted atoms. The objective of the MPD is to decompose a
signal ( )tx as a linear expansion of waveforms, selected from the dictionary, that best match the TF structure of the signal. This decomposition is done by successive
approximations of ( )tx with orthogonal projections on dictionary elements and is thus iterative in nature. The
signal ( )tx is first decomposed
as ( ) ( ) ( )trtdatx bm111 += , where r1(t) is the residual signal
after approximating the signal ( )tx with the dictionary element ( ),1 tdbm ( ) ( )1 1, bm bmx d x t d t dt= �
is the
projection of ( )tx onto the dictionary element ( )tdbm1
, and bm represents the best matched dictionary element. This dictionary element corresponds to the signal component with the highest energy is extracted first. Specifically
, nn
bm dxdx ,max, 1 = . After the thk iterations,
( ) ( ) ( )trtdtr kkbm
kk 1−+= α , kbm
kk dr ,=α . (2)
Where ( )td kbm is the chosen dictionary element that best matches the residual ( )tr k which is given
by ( ) ( ) ( )tdtrtr bm111 −−− −= κκκκ α . In practice, a maximum number of iterations and an acceptable small
residue energy compared to the data energy are used as stopping criteria to the algorithm. After K iterations, the decomposed signal is given by
( ) ( ) ( )trtdtx kK
k
kbm
k 1
1
+
=
+=�α . (3)
IV. Particle Filter Matching Pursuit Algorithm
For the decomposition of a given waveform, we consider a dictionary of sinusoidal atoms that are time-shifted, frequency-shifted and scaled. Therefore, the state vector to be estimated has three partitions, each representing the aforementioned atom components. Each of the partitions l = 1,…,L evolves according to
vyy ilil += ,, (4)
with ,,...,1, Iii = being the iteration step of the particle filter and v being a uniformly distributed noise term that takes values in a relatively small range, that differs for each of the partitions. In the initialization subroutine i = 1 and the term
1, −ily is set to zero. Moreover, the noise term ranges from the minimum to the maximum values
Figure 1. Basic time-frequency atom.
American Institute of Aeronautics and Astronautics
5
• Initialization Subroutine • Update Subroutine- Repeat M times • MP iteration • If Rpk – Rpk-1 < .05 And Rpk – Rpk-2 >.05
- Update Subroutine-Repeat M times • If Rpk – Rpk-2 >.05
- Initialization Subroutine - Update Subroutine-Repeat M times • If Rpk < 0.1 OR k > 500 END • GOTO MP iteration
for each of the partitions that are the same as the ones used for the three respective components of the dictionary used in the regular MP algorithm. This method propagates partitions independently according to a uniform
distribution ( )1,, −ililyyq for each partition l. Where possible, it evaluates their effectiveness in characterizing
waveform components individually using a partition weight function that is described in this section. This method is the independent partition method of propagating partitions that removes the limitations imposed by the increase in the dimensionality of the state vector33. The state vector is expressed in terms of the state vectors of each target as
[ ]iLiii yyyY ,,2,1 ...= (5)
where xT denotes the transpose of x. Note that, as each of the particles of the particle filter corresponds to an atom in the dictionary, we refer to particles as atoms. If applicable, we weight each proposed partition l of atom n
kly ,~ with a partition weighing
function, ( )nill
nil ygb ,,
~~ ∝ . The function ( )nill yg ,
~ is chosen such that it bears information on the specific signal
structure that is represented by the specific partition. In this application we may weigh time shifts with a function that is proportional to the instantaneous energy of the signal at each proposed time. For the frequency shift a weight function is used that is proportional to the Welch periodogram. The partition weight distribution of each partition
{ }N
nnilb
1,
~=
normalized and an index nj′ is sampled from the resulting distribution with replacement. The resulting
selected partition has the value njil
nil yy ′=′
,,~ and bias
'/
,,
~n
j
iln
il bb = . For the partitions that are not weighed and
sampled, we set 1/
, =nilb . The partitions are combined to form atoms [ ]n
iLni
ni yyy ,,1 ...= . In the particle weight
calculation the inner product ( ) kbm
ni dxYf ,= is included that is a measure of the similarity of the atom to the
waveform. The weight function also takes into account the proposal densities ( )1,, −ilil
yyq and the biases/
,nilb .
The proposal densities are uniform and with the same variance for each atom. Moreover, each of the partitions is
proposed independently. Therefore, the resulting proposal density is equal to ( )1,, −Π ililLl yyq and when evaluated
at each of the atoms it produces equal values for all atoms. Therefore, this factor may be omitted from the weight function that is evaluated up to proportionality. The resulting weights are calculated as:
( )( ) .
,1
ilLl
nin
ini b
yfww
Π∝ − The distribution of { }N
nniw 1= is normalized and particles are resampled from this
distribution. The steps of this algorithm are described in Table 1. The atoms resulting from this step are either propagated again or form the dictionary to be used by the MP as described in Table 2.
Table 1: PFMP Algorithm
American Institute of Aeronautics and Astronautics
6
• For each partition l=1,…,L - For each particle n=1,…,N
Initialization: sample ( )max,min,, ,~~ll
nil yyUy
Update: Sample ( )nilil
nil yyqy 1,,, ~~
−
Compute the weight ( )nil
nil yglb ,,
~~ ∝
- Normalize { }N
nnilb
1,
~=
- For each Nn ,...,1=′
Sample index nj′ from the distribution of nilb ,
~with replacement
Keep the value and bias of the sample: nn jil
nil
jil
nil bbyy ′′ == ′′
,,,,
~,~
• For each particle n=1,…,N
- Assemble particle from partitions [ ]niL
ni
ni yyY ,,1 ...=
- Compute ( )
)( ,1 n
ilLl
nin
ini b
yfww
Π∝ −
• Normalize { }N
nniw 1=
• Resample particles according to { }N
nniw 1=
Fixed end
Sensor 1 Actuator
PZT
1 cm
28 cm
5.1 cm PZT PZT
6 cm
Sensor 2 Delamination
9.5 cm 9.5 cm
2.5 cm
C B A
Table 2: Initialization/Update Subroutine
V. Results and Discussion For damage quantification, experiments were conducted to obtain the response of a 16 ply 0/90 Gr/Ep composite
plate with surface bonded actuators subjected to forced excitation. The investigated damages are notches, saw-cut, drilled holes, impact delamination of 4.5cmx5cm introduced at the 4th interfaces from the midplane. In the first set of experiments, a 4.5 cycle tone burst signal with a central frequency of 8 KHz, was used as the excitation signal, and sampled at 1MHz. The objective is to localize the damage, by decomposing the disturbed signal in terms of wave-based dictionary elements and time-of-flight analysis of these individual components to determine the location of damage. The basic atom of the MPD is a Gaussian enveloped chirped sinusoid and the dictionary consists of elements which are the time-scaled, time-shifted and amplitude modulated version of the basic atom. This atom was chosen because it satisfies the Lamb Wave modes.
Figure 2. Experimental Setup with Structural Dimensions.
American Institute of Aeronautics and Astronautics
7
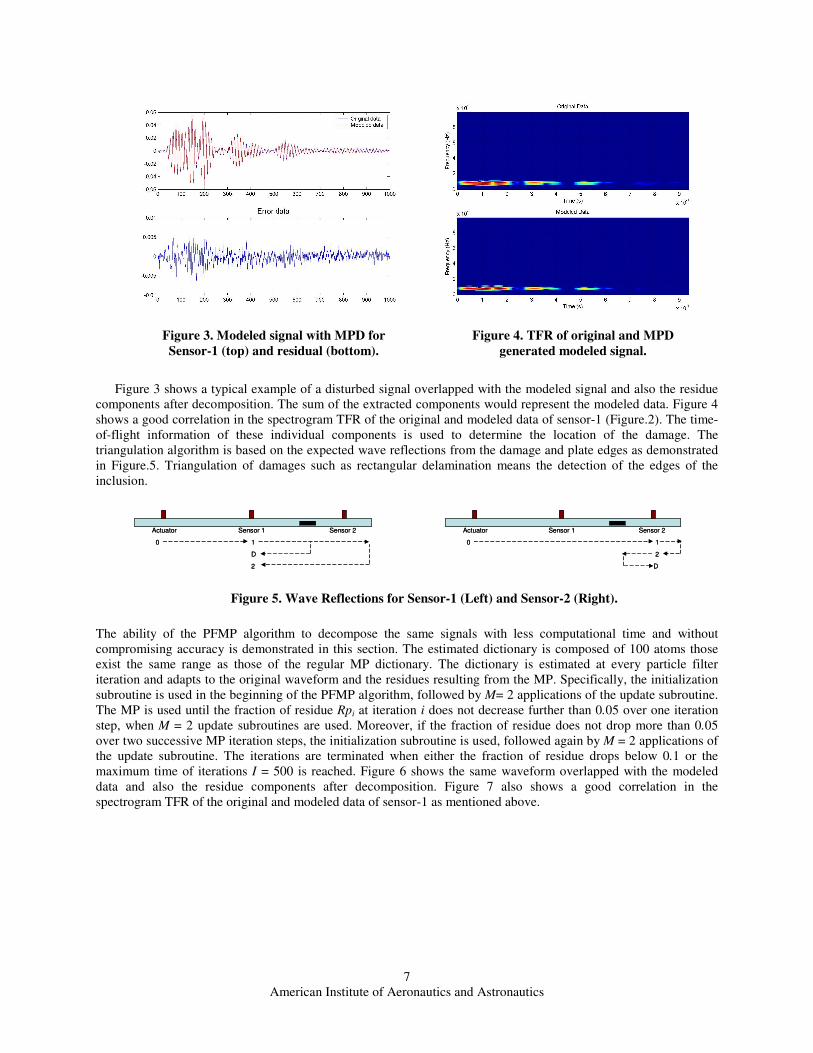
Figure 4. TFR of original and MPD generated modeled signal.
Figure 3. Modeled signal with MPD for Sensor-1 (top) and residual (bottom).
Figure 3 shows a typical example of a disturbed signal overlapped with the modeled signal and also the residue
components after decomposition. The sum of the extracted components would represent the modeled data. Figure 4 shows a good correlation in the spectrogram TFR of the original and modeled data of sensor-1 (Figure.2). The time-of-flight information of these individual components is used to determine the location of the damage. The triangulation algorithm is based on the expected wave reflections from the damage and plate edges as demonstrated in Figure.5. Triangulation of damages such as rectangular delamination means the detection of the edges of the inclusion.
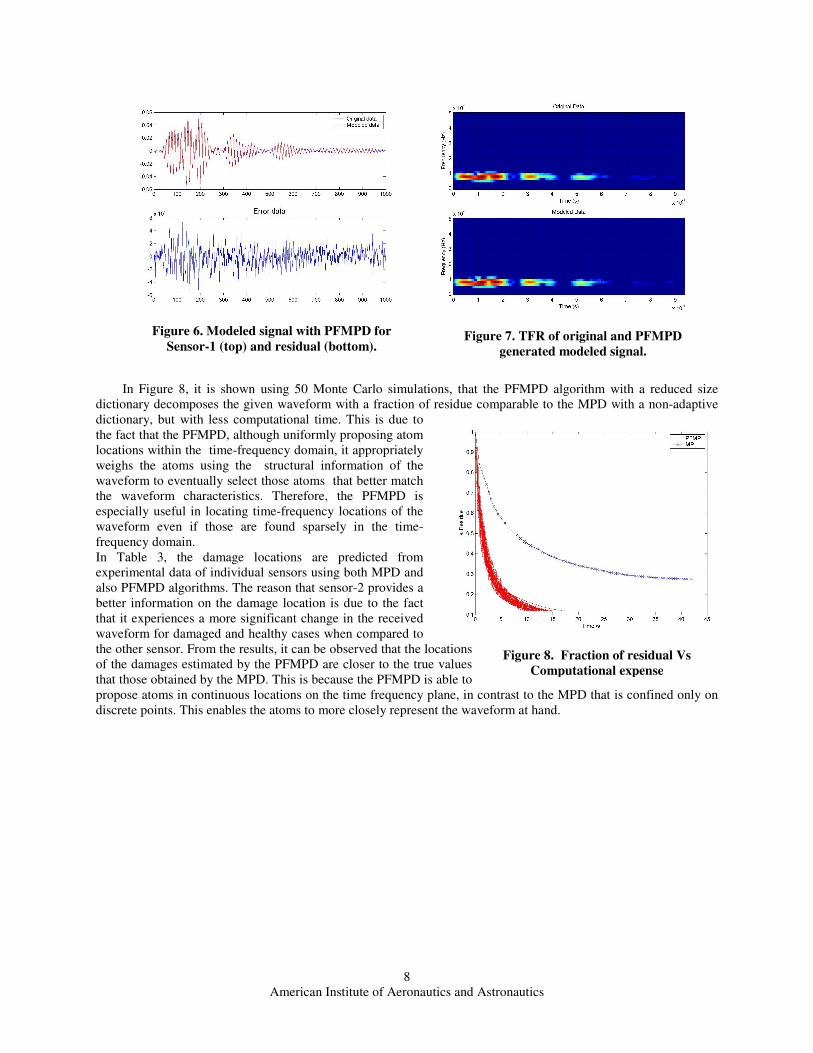
The ability of the PFMP algorithm to decompose the same signals with less computational time and without compromising accuracy is demonstrated in this section. The estimated dictionary is composed of 100 atoms those exist the same range as those of the regular MP dictionary. The dictionary is estimated at every particle filter iteration and adapts to the original waveform and the residues resulting from the MP. Specifically, the initialization subroutine is used in the beginning of the PFMP algorithm, followed by M= 2 applications of the update subroutine. The MP is used until the fraction of residue Rpi at iteration i does not decrease further than 0.05 over one iteration step, when M = 2 update subroutines are used. Moreover, if the fraction of residue does not drop more than 0.05 over two successive MP iteration steps, the initialization subroutine is used, followed again by M = 2 applications of the update subroutine. The iterations are terminated when either the fraction of residue drops below 0.1 or the maximum time of iterations I = 500 is reached. Figure 6 shows the same waveform overlapped with the modeled data and also the residue components after decomposition. Figure 7 also shows a good correlation in the spectrogram TFR of the original and modeled data of sensor-1 as mentioned above.
Actuator
0
Sensor 1 Sensor 2
1
2
D
Actuator
0
Sensor 1 Sensor 2
1
2
D
Actuator
0
Sensor 1
1
D
2
Sensor 2Actuator
0
Sensor 1
1
D
2
Sensor 2
Figure 5. Wave Reflections for Sensor-1 (Left) and Sensor-2 (Right).
American Institute of Aeronautics and Astronautics
8
Figure 7. TFR of original and PFMPD generated modeled signal.
Figure 8. Fraction of residual Vs Computational expense
Figure 6. Modeled signal with PFMPD for Sensor-1 (top) and residual (bottom).
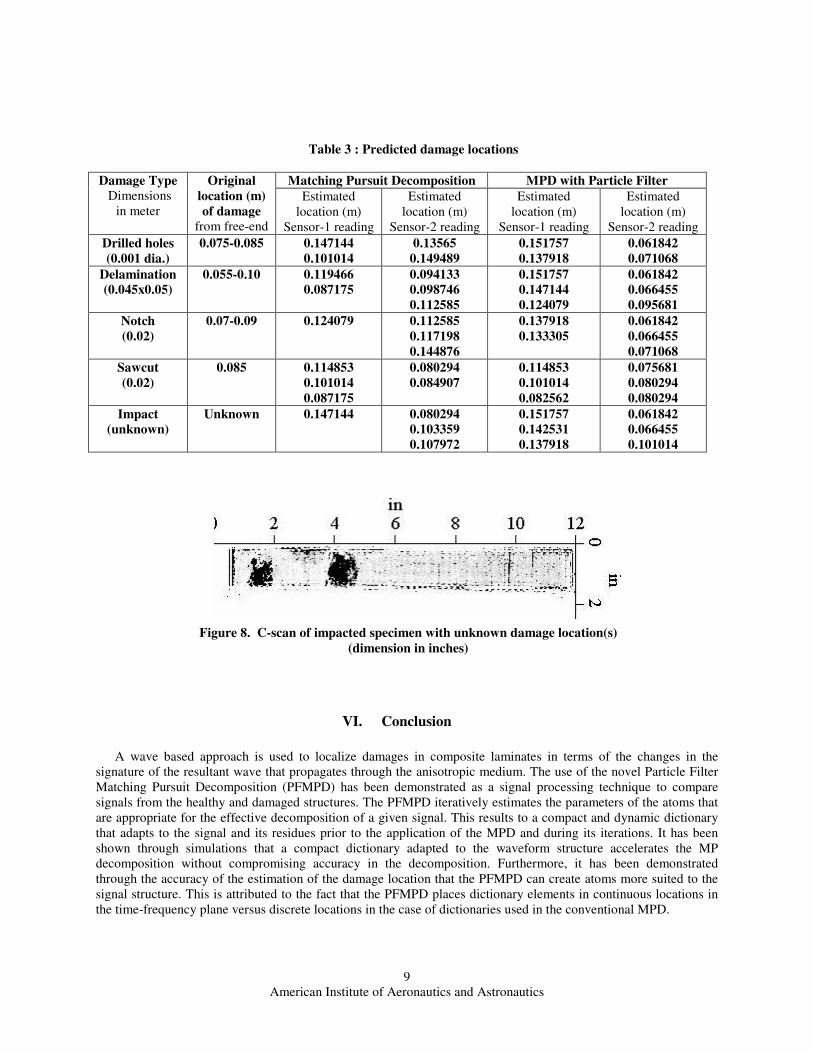
In Figure 8, it is shown using 50 Monte Carlo simulations, that the PFMPD algorithm with a reduced size dictionary decomposes the given waveform with a fraction of residue comparable to the MPD with a non-adaptive dictionary, but with less computational time. This is due to the fact that the PFMPD, although uniformly proposing atom locations within the time-frequency domain, it appropriately weighs the atoms using the structural information of the waveform to eventually select those atoms that better match the waveform characteristics. Therefore, the PFMPD is especially useful in locating time-frequency locations of the waveform even if those are found sparsely in the time-frequency domain. In Table 3, the damage locations are predicted from experimental data of individual sensors using both MPD and also PFMPD algorithms. The reason that sensor-2 provides a better information on the damage location is due to the fact that it experiences a more significant change in the received waveform for damaged and healthy cases when compared to the other sensor. From the results, it can be observed that the locations of the damages estimated by the PFMPD are closer to the true values that those obtained by the MPD. This is because the PFMPD is able to propose atoms in continuous locations on the time frequency plane, in contrast to the MPD that is confined only on discrete points. This enables the atoms to more closely represent the waveform at hand.
American Institute of Aeronautics and Astronautics
9
Table 3 : Predicted damage locations
Figure 8. C-scan of impacted specimen with unknown damage location(s) (dimension in inches)
Matching Pursuit Decomposition MPD with Particle Filter Damage Type Dimensions
in meter
Original location (m) of damage
from free-end
Estimated location (m)
Sensor-1 reading
Estimated location (m)
Sensor-2 reading
Estimated location (m)
Sensor-1 reading
Estimated location (m)
Sensor-2 reading Drilled holes (0.001 dia.)
0.075-0.085 0.147144 0.101014
0.13565 0.149489
0.151757 0.137918
0.061842 0.071068
Delamination (0.045x0.05)
0.055-0.10 0.119466 0.087175
0.094133 0.098746 0.112585
0.151757 0.147144 0.124079
0.061842 0.066455 0.095681
Notch (0.02)
0.07-0.09 0.124079 0.112585 0.117198 0.144876
0.137918 0.133305
0.061842 0.066455 0.071068
Sawcut (0.02)
0.085 0.114853 0.101014 0.087175
0.080294 0.084907
0.114853 0.101014 0.082562
0.075681 0.080294 0.080294
Impact (unknown)
Unknown 0.147144 0.080294 0.103359 0.107972
0.151757 0.142531 0.137918
0.061842 0.066455 0.101014
VI. Conclusion A wave based approach is used to localize damages in composite laminates in terms of the changes in the
signature of the resultant wave that propagates through the anisotropic medium. The use of the novel Particle Filter Matching Pursuit Decomposition (PFMPD) has been demonstrated as a signal processing technique to compare signals from the healthy and damaged structures. The PFMPD iteratively estimates the parameters of the atoms that are appropriate for the effective decomposition of a given signal. This results to a compact and dynamic dictionary that adapts to the signal and its residues prior to the application of the MPD and during its iterations. It has been shown through simulations that a compact dictionary adapted to the waveform structure accelerates the MP decomposition without compromising accuracy in the decomposition. Furthermore, it has been demonstrated through the accuracy of the estimation of the damage location that the PFMPD can create atoms more suited to the signal structure. This is attributed to the fact that the PFMPD places dictionary elements in continuous locations in the time-frequency plane versus discrete locations in the case of dictionaries used in the conventional MPD.
American Institute of Aeronautics and Astronautics
10
Acknowledgment
This research was supported by the Air Force Office of Scientific Research, grant number: F496200310174, technical monitor Dr. Clark Allred.
References 1A Review of Structural Health Monitoring Literature: 1996-2001. Los Alamos National Laboratory Report, LA-13976-MS,
2003.
2Arulampalam, M. S. Maskell, S. Gordon, N. and Clapp, T., "A Tutorial on Particle Filters for Online Nonlinear/Non-Gaussian Bayesian Tracking", IEEE Transactions on Signal Processing Vol. 50, No. 2, 2002, pp. 174-188.
3Akino, M., Tsuyoshi, M., Yamanaka, K., “Fatigue Crack Closure Analysis Using Nonlinear Ultrasound,” Review of Quantitative Nondestructive Evaluation, Green Bay, USA, 2003.
4Akino, M., Tsuyoshi, M., Yamanaka K., “Evaluation of Closed Cracks by Analysis of Subharmonic Ultrasound with
Closure Stress,” Non-Destructive Testing and Condition Monitoring, Vol.46, No.11, 2004, pp. 666-70. 5Braun, S., Datner, B., “Analysis of Roller/Ball Bearing Vibrations,” ASME Trans Mech Des, Vol.101, 1979, pp. 118-25. 6Barkov, A., Barkova, N., Mitchell, .J S., “Condition Assessment and Life Prediction of Rolling Element Bearings,” Part. 1.
Sound Vibr, Vol.29, 1999, pp. 10-17. 7Bovsunovskii, P., “Vibration of a Nonlinear Mechanical System Simulating a Cracked Body,” Strength of Materials, Vol.
33, No. 4, 2001, pp.370-79.
8Chattopadhyay, A., Zhou, X., and Das, S., “Acoustic Based Structural Health Monitoring for Composites Using Optimal Sensor Placement: Analysis and Experiments,” of Reinforced Plastics and Composites (in press), 2004.
9Chattopadhyay, A., Zhou, X., and Das, S., “Behavior of Elastic Wave Propagation in Fiber Reinforced Composite Materials,” Journal of Intelligent Material Systems and Structures (in press), 2004.
10Chattopadhyay, A., Zhou, X., and Das, S., “Acoustic Based Structural Health Monitoring for Composites Using Optimal Sensor Placement: Analysis and Experiments,” of Reinforced Plastics and Composites (in press), 2004.
11Chattopadhyay, A., Zhou, X., Papandreou-Suppappola, A., and Das, S., “On the Use of the Matching Pursuit
Decomposition Signal Processing Technique for Structural Health Monitoring,” 12th SPIE Annual International symposium on Smart Structures and Materials, San Diego, California, 2005.
12Chattopadhyay, A., Dragomir-Daescu, D., “Damage Modeling and Detection in Smart Composite,” Proceedings of the International Mechanical Engineering Congress and Exposition, Orlando, FL, 63, 2000, pp. 122-32.
13Chattopadhyay A., Kim H. S., Ghoshal A., “Nonlinear Vibration Analysis of Smart Composite Structures with
Delamination using a Refined Layerwise Theory,” International Conference on Adaptive Structures (ICAST), Berlin, Germany, 2002.
14Chang, F.-K., ed. Structural Health Monitoring: Current Status and Perspectives, Proceedings of the International
Workshop on Structural Health Monitoring, Stanford University, September, 1997, pp. 18-20. 15Chang, F.K., (Editor), Structural Health Monitoring, Proceedings of the 2nd International Workshop on Structural Health
Monitoring, Stanford University, Stanford, CA, 1999. 16Cohen L., “Time-Frequency Analysis”, Prentice-Hall, Englewood Cliffs, NJ, 1995. 17Doebling, S. W., Farrar, C. R., Prime, M.B., Shevitz, D.W., "Damage Identification and Health Monitoring of Structural
and Mechanical Systems from Changes in Their Vibration Characteristics: a Literature Review," Los Alamos National Laboratory, Report LA-13070-MS, 1996.
American Institute of Aeronautics and Astronautics
11
18Donskoy D., Ekimov A., Luzzato E., Jean-Louis Lottiaux., Stanislav Stoupin., Andrei Zagrai., “New Vibro-Modulation System for Detection and Monitoring of Cracks and other Contact-Type Defects,” Smart Structure and Materials , Vol. 5057, 2003, pp. 400-409.
19Dyer, D., Stewart, R. M., “Detection of Rolling Element Bearing Damage by Statistical Vibration Analysis,” ASME Trans Mech Des, Vol.100, 1978, pp. 229-35.
20Ebenezer, S.P., Papandreou-Suppappola, A., Suppappola, S.B., “Classification of Acoustic Emissions Using Modified Matching Pursuit,” EURASIP Journal on Applied Signal Processing, Vol. 3, 2004, pp. 347-357.
21Ghartey, K. Cochran, D. and Papandreou-Suppappola, A., "Multi-channel Signal Detection Using Time-Varying Estimation Techniques," International Symp. On Signal Proc. and its Applications, Vol. 2, 2001, pp. 577-580.
22Harting, D. R., “Demodulated Resonance Analysis: a Powerful Incipient Failure Detection Technique,” ISA Trans, Vol.17, 1978, pp. 35-40.
23Hou, Z. K., Noori, M. "Application of Wavelet Analysis for Structural Health Monitoring" in Proceedings of the 2nd
International Workshop on Structural Health Monitoring, Stanford University, Stanford, CA, 1999, pp.946-55. 24Karabulut, G. Z., Kurt, T., and Yongacoglu, A., "Angle of Arrival Detection by Matching Pursuit Algorithm," Vehicular
Technology Conference, 2004, pp. 324-328.
25Kim H. S., Chattopadhyay A., Ghoshal A., “Dynamic Analysis of Composite Laminates with Embedded Multiple Delaminations Using an Improved Layerwise Theory,” AIAA Journal, Vol.41, 2003, pp. 1771-1779.
26Lei, J., “Failure Detection of Bearings,” Xi’an: Jiaotong University Press, 1988. 27Liu, B., Ling, S. F., Gribonval, R., “Bearing failure detection using matching pursuit,” NDT&E International Vol.35, 2002,
pp. 255-62.
28Mallat, S.G., and Zhang, Z., "Matching Pursuits with Time-Frequency Dictionaries," IEEE Transactions on Signal Processing, vol. 41, 1993, pp. 3397-3415.
29Matveev, V. V., Bovsunovskii, .A. P., “Some Aspects of Vibration of An Elastic Body with A “Breathing” Discontinuity of Material, ” Strength of Materials, Vol.32, No. 5, 2000, pp. 434-45.
30McFadden, P. D., Smith, J. D., “Vibration Monitoring of Rolling Element Bearings by High Frequency Resonance Technique-a review,” Tribology Int, Vol.17, 1984, pp. 3-10.
31Neff, R. and Zakhor, A., "Matching Pursuit Video Coding .I. Dictionary Approximation," IEEE Transactions on Signal Processing, Vol. 12, No. 1, 2002, pp. 13-26.
32Nef,f R., Zakhor, A., “Matching Pursuit Video Coding at Very Low Bit Rates,” In Proceedings of IEEE Data Compression Conference, 1995, pp.411-420.
33Orton, M. and Fitzgerald, W., "A Bayesian Approach to Tracking Multiple Targets Using Sensor Arrays and Particle
Filters," IEEE Transactions on Signal Processing,, Vol. 50, No. 2, 2002, pp. 216-223.
34Papandreou-Suppappola, A. Suppappola, S.B., "Analysis and Classification of Time-varying Signals with Multiple Time-frequency Structures," IEEE Signal Processing Letters, Vol.9, No.3, 2002, pp.92-95.
35Papandreou-Suppappola, A., ed. “Time-varying processing: Tutorial on principles and practice,” Application in Time-Frequency Signal Processing, CRC Press, 2002.
36Papandreou-Suppappola, A., Suppappola, S.B., “Adaptive Time-Frequency Representations for Multiple Structures,” in 10th IEEE workshop on Statistical Signal and Array Processing,(Pennsylvania, USA), 2000, pp.579-83.
37Pandey, A. K., Biswas, M., Samman, M., “Damage Detection from Changes in Curvature Mode Shapes”, Journal of Sound
and Vibration, Vol. 145, No. 2, 1991, pp.321-332.
38Prasad, H., Ghosh, M., Biswas, S., “Diagnostic Monitoring of Rolling Element Bearings by High Frequency Resonance Technique,” ASLE Trans, Vol.28, 1985, pp.439-448.
American Institute of Aeronautics and Astronautics
12
39Saravanos, D. A., Hopkins, D. A., “The effects of delaminations on the damped dynamic characteristics of composite
laminates: analysis and experiments”, Journal of Sound and Vibration, Vol. 192, No.5, 1996, pp.977-93. 40Thornburgh, R .P., Chattopadhyay, A., “Combined delamination and matrix cracking in adaptive composite laminates”.
44th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Norfolk, Virginia, AIAA 2003, pp. 11.
41Vetterli, M., Kalker, T., “Matching Pursuit for Compression and Application to Motion Compensated Video Coding” In Proceedings of ICIP, 1994, pp.725-7299.
42Wang, W. Y., Harrap, M. J., “Condition Monitoring of Rolling Element Bearing by Using Cone Kernel time-Frequency Distribution,” In Proceedings of the SPIE Conference on Measurement Technology and Intelligent Instrument, 1993, pp.290-8.
43Yamanaka, K., Tsuyoshi, M., Toshihiro, T., “Evaluation of Closed Cracks by Model Analysis of Subharmonic Ultrasound,”
Japanese Journal of Applied Physics, Vol. 43, No. 5B, 2004, pp.3082-3087. 44Yamanaka K., Tsuyoshi M., Toshihiro T., “Evaluation of Nanoscale Cracks by Low-Pass Filter Effect in Nonlinear
45Zhang, X., Durand, L. G., Senhadji, L., Lee, H. C., Coatrieux, J. L., “Analysis-Synthesis of The Phono-Cardiogram Based on The Matching Pursuit Method,” IEEE Trans Biomed Eng, Vol.45, 1998, pp.962-970.