4th AIAA Multidisciplinary Design Optimization Specialist Conference, April 2008, Schaumburg, IL
American Institute of Aeronautics and Astronautics
1
Case Studies in Pareto Set Identification Using Pseudo Response Surfaces
Anoop A. Mullur1 and Achille Messac2 Rensselaer Polytechnic Institute, Troy, NY 12180
Sirisha Rangavajhala3 Rensselaer Polytechnic Institute, Troy, NY 12180
Multiobjective optimization of functions involving complex and expensive simulations can be a computationally prohibitive task without the use of response surface models. This paper presents multiobjective optimization case studies using a newly developed method called Pseudo Response Surface (PRS) approach by the authors. This approach offers several computational benefits over traditional response surface approaches, such as sequential approximate optimization and construction of approximations over the global input space. Numerical examples are presented, which show a significant reduction – over traditional approaches – in the number of function evaluations required to obtain the Pareto frontier of the multiobjective problem. We also explore the ability of the PRS approach to handle the special case of a disjoint Pareto frontier, and comment on the certain numerical issues during the use of this approach.
Nomenclature i, j = design variable or objective function subscript x = vector of design variable values g(x) = vector of constraint function values μ = vector of objective function values μ = vector of normalized objective function values
I. Introduction umerical simulations are used by designers and developers in a wide range of industry and research settings, where there is invariably a need for computational cost reduction. The subject paper deals with the integration
of advanced optimization-based design tools within a simulation-based decision making framework, while maintaining the computational effort to a minimum. In this context, building computationally benign approximate models of expensive computer simulations, or metamodeling, is becoming widely accepted as an effective tool for comprehensive design space exploration1-4. Purists often view the lack of physics within metamodels as a hindrance to physically intuitive decision making. However, metamodels can dramatically reduce computational cost, allowing designers to seamlessly and practically integrate advanced computational tools within expensive simulations.
In this paper, we investigate the performance of surrogate models from the perspective of multiobjective optimization – a critical area of practical design optimization, which presents new challenges for efficiently constructing metamodels5,6. As part of this investigation, we present case studies in efficient Pareto set identification using various types of surrogate models, while focussing on the recently developed Pseudo Response Surface (PRS) approach by the authors7-9. This new approach offers significant computational benefits over traditional response surface approaches for solving multiobjective problems. Under this approach, the design space is efficiently explored such that the expensive function evaluations are concentrated in the region of Pareto optimality.
1 Currently Sr. Research Engineer, ExxonMobil Upstream Research Company, Houston, TX, AIAA Member 2 Professor, Mechanical and Aerospace Engineering, AIAA Fellow 3 Ph.D., Mechanical Engineering, AIAA Member
N
49th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference <br> 16t7 - 10 April 2008, Schaumburg, IL
4th AIAA Multidisciplinary Design Optimization Specialist Conference, April 2008, Schaumburg, IL
American Institute of Aeronautics and Astronautics
2
Additionally, the resulting metamodels have the unique capability of yielding highly accurate Pareto optimal points upon optimization. Thus, the PRS approach can potentially lead to accurate optimal solutions at a fraction of the computational cost of current methods7,9.
PRS models are zero-th order surrogates (constructed using only function values), which combine the appealing characteristics of local and global approximations through a judicious choice of sampling locations. The PRS approach follows three basic steps: (i) anchor point identification: this entails obtaining an estimate of the end points of the Pareto frontier, (ii) exploring the Pareto frontier using the normal constraint (NC) exploration process to obtain the sample points for response surface building, and finally (iii) constructing the pseudo response surfaces using the obtained points. These PRS models can now be used in the place of the original objective functions and constraints to solve the multiobjective optimization problem. For more details of PRS modeling, the reader is referred to recent publications on this topic7-9.
In this paper, we present several numerical examples and case studies (multiobjective optimization problems from the literature9), which demonstrate the efficiency of the PRS approach. Specifically, through these examples, we strengthen our original proposition of developing a computationally efficient metamodeling approach for multiobjective optimization. The examples presented in this paper do not involve any expensive analysis; however, they are complex enough in terms of the number of design variables, objectives, and constraints that we can draw strong conclusions about the efficacy of the PRS approach – using the results obtained. The first two problems involve the well-known Golinski Speed Reducer problem – which has also been used as an MDO benchmark problem. We use the two and three objective variations of this problem. Problem 3 is another well-known benchmark problem from the literature – the ten bar truss, and the last problem is an 18-variable portal frame design problem. The latter two problems are borrowed from the GENESIS (a commercial structural analysis and optimization software) user’s manual10, and their analyses are performed within Genesis – to mimic a simulation-based optimization problem. Doing so also allows us to use some of the efficient built-in sequential approximate optimizers in Genesis for comparison purposes. For these last two problems, we also compare the results using the PRS approach and those obtained using Genesis. We also discuss potential numerical issues that we experienced in applying the PRS approach, and conclude the paper with possible areas of further development.
II. Numerical Examples In this section, we first compare the performance of the PRS approach with the traditional surrogate modeling
approach for solving multiobjective optimization problems. The traditional approach involves building global approximations for each objective function and then obtaining the Pareto set by solving the resulting approximate multiobjective problem. We then compare (for problems 3 and 4) the performance of the PRS approach with that of the sequential approximate optimization (SAO) approach using GENESIS. Secondly, we present our experience of using PRS models for some specialized cases of multiobjective problems, such as those involving disjoint Pareto frontiers. Experience with PRS parameter settings and their sensitivity to the final outcome is also discussed in this section.
A. Pareto set identification using PRS
Example 1: Golinski speed reducer This is a well-known test problem (MDO Test Suite Problem 2.4) concerning the design of a simple gear box
that can be used in a light airplane between the engine and the propeller to allow optimum rotating speed for each. The original test suite problem is a single objective problem to minimize the weight of the gear box, subject to constraints imposed by typical design practices. We use a multiobjective formulation as solved by Kurpati et al. 11, where minimizing volume is one objective, whereas the other is to minimize the stress in one of the gear shafts. The complete problem description can be found in references 9,11.
NC Exploration
To begin the NC exploration, we assume the knowledge of the two anchor points (one for each objective). We construct an initial sample of 10 points in the region of the anchor point corresponding to the objective, μ2. This is followed by the normal constraint exploration process that yields an approximately Pareto set, which is used as a sample to construct the objective function and constraint function metamodels. The number of sample points requested is 40, which is equal to the number of points on the utopia line (the line joining the anchor points). Note, however, that even though the spacing between the points may be equal in the beginning, the NC exploration
4th AIAA Multidisciplinary Design Optimization Specialist Conference, April 2008, Schaumburg, IL
American Institute of Aeronautics and Astronautics
3
algorithm is capable of adapting itself, and can result in a higher number of points by the time the algorithm terminates. The entire exploration algorithm requires 50 function evaluations – not including the expense for anchor point calculation. However, the anchor points can be obtained by computationally efficient approaches, such as sequential approximate optimization, as will be seen in problems 3 and 4 in this section.
PRS Model Building
The nearly Pareto sample is passed through the E-RBF (Extended Radial Basis Function12) interpolator after the identification of pseudo data points and the assignment of pseudo response values. The E-RBF interpolator produces pseudo response surfaces of the objective and constraint functions, and helps us define the approximate multiobjective optimization problem. It can be solved using any preferred multiobjective technique, but here we show the results of using the normal constraint approach to generate the bi-objective Pareto frontier. Figure 1 shows the Pareto optimum points obtained upon using the normal constraint approach on the PRS models. The points shown in the figure are the points validated from the actual models (that is, the actual objective functions evaluated at the obtained design points). Clearly, one can see that a highly accurate Pareto optimum set is obtained.
The percentage metamodel error is calculated at four distinct points along the frontier. Also, the percent constraint violation is also obtained for each obtained Pareto point. The errors are all in the range of 3% or less, indicating the high accuracy of the PRS approach. Table 1 compares the computational costs in terms of function evaluations per Pareto point with the global approximation approach. Thus, we observe that by simply constructing metamodels in the region of Pareto optimality, one can drastically reduce the number of function evaluations of the exact functions – without loss in accuracy of the final Pareto points.
For the next example, we convert the above two objective problem into a three-objective one by treating one of the constraints as an additional design objective. By so doing, we will demonstrate the efficacy of the PRS approach for multiobjective problems.
Example 2: Golinski speed reducer, 3 objectives
The three-objective problem description can be found in Ref. 9. Here we concentrate on the results of applying the PRS approach to solve the multiobjective problem.
NC Exploration
The inclusion of a third objective requires us to follow the more involved exploration procedure detailed in Ref. 7. This involves creating a grid of points on the utopia plane. Each vertex of the triangle represents an anchor point (ideal point with respect to each design objective). The number of points on this grid for the current problem is 64. Each of these points will yield a nearly Pareto sample point during our exploration process. Note that the process requires as many function evaluations as the
Figure 1. Actual and obtained Pareto points – Golinski SpeedReducer (two objectives)
Figure 2. Actual and obtained points- Golinski speed reducer(three objectives)
4th AIAA Multidisciplinary Design Optimization Specialist Conference, April 2008, Schaumburg, IL
American Institute of Aeronautics and Astronautics
4
number of grid points (64), and in addition 10 sample points created near the vicinity of the anchor point corresponding to objective 1. PRS Model Building
38 pseudo points7 (in a 7-dimensional space) were identified using the pseudo data point identification process. These points along with the sample points above are used to construct the metamodels for each objective function and constraint function. As before, we use the E-RBF approach for solving the final optimization problem. Metamodel-based Optimization
The MATLAB gradient-based optimizer ‘fmincon’ is used to solve the multiobjective optimization involving the metamodels. The multiobjective technique used to generate the Pareto frontier is the normal constraint approach. 100 Pareto points are obtained on the frontier and plotted in Fig. 2. Note that the plotted points are the exact objective function values at the Pareto points yielded by the metamodel-based optimization. The metamodel error and constraint violation are less than 2%. The computational expense is compared with that of constructing global approximations in Table 1. The PRS approach results in a significant reduction in computational effort, as can be seen. Example 3: Ten-bar truss
The ten-bar truss is a well-known problem13 often used in the design optimization literature for benchmarking the performance of various optimization algorithms. The structure is shown in Fig. 3 (top). These members are connected to each other at six nodes, represented by 1 to 6 in Fig. 3. We assume that the truss is in one plane, and every node has only two degrees of freedom (displacements along the horizontal and vertical axes). The left hand side of the truss is fixed to the wall, and therefore nodes 1 and 4 have zero displacements. F1 to F8 represent loads applied to these nodes. Cross sectional areas of the truss members are given by x1 to x10. For the current problem, the loading condition is: F6 = F8 = 100, 000 lb; all other F’s = 0.
A multiobjective problem is defined to minimize the mass (m) of the structure, and simultaneously minimize the stress in beam 2 (σ2). The beam number is chosen arbitrarily, as the aim is to simply demonstrate the efficacy of the PRS approach. Notice that the two objectives are conflicting: increasing the areas will increase the mass, but decrease the stress, and decreasing the areas will lead to lower structural mass and higher stress. The problem formulation is given as
[ ]2
max2
22
min
. ., 1,..,10
0.1 20 in , 1,..,10
2500 lb/in2100 lb
x
i
i
m
s ti
x i
m
σ
σ σ
σ
≤ =
≤ ≤ =
≤
≤
(1)
Figure 3. Ten Bar Truss (top); Portal Frame Design(bottom)
4th AIAA Multidisciplinary Design Optimization Specialist Conference, April 2008, Schaumburg, IL
American Institute of Aeronautics and Astronautics
5
where σmax is the maximum allowable stress = 25,000 psi (tension and compression). The Young’s modulus, E = 1× 107 psi and the material density, ρ = 0.101 lb/in3. The aim is to construct metamodels for the volume and all of the 10 stress responses with a minimal number of exact analyses (to calculate the stress and the mass responses). The analysis is performed in GENESIS, simply because we can use its approximate optimizer to yield us the anchor points – usually with only a few (10-20) function evaluations. Sequential Approximate Optimization
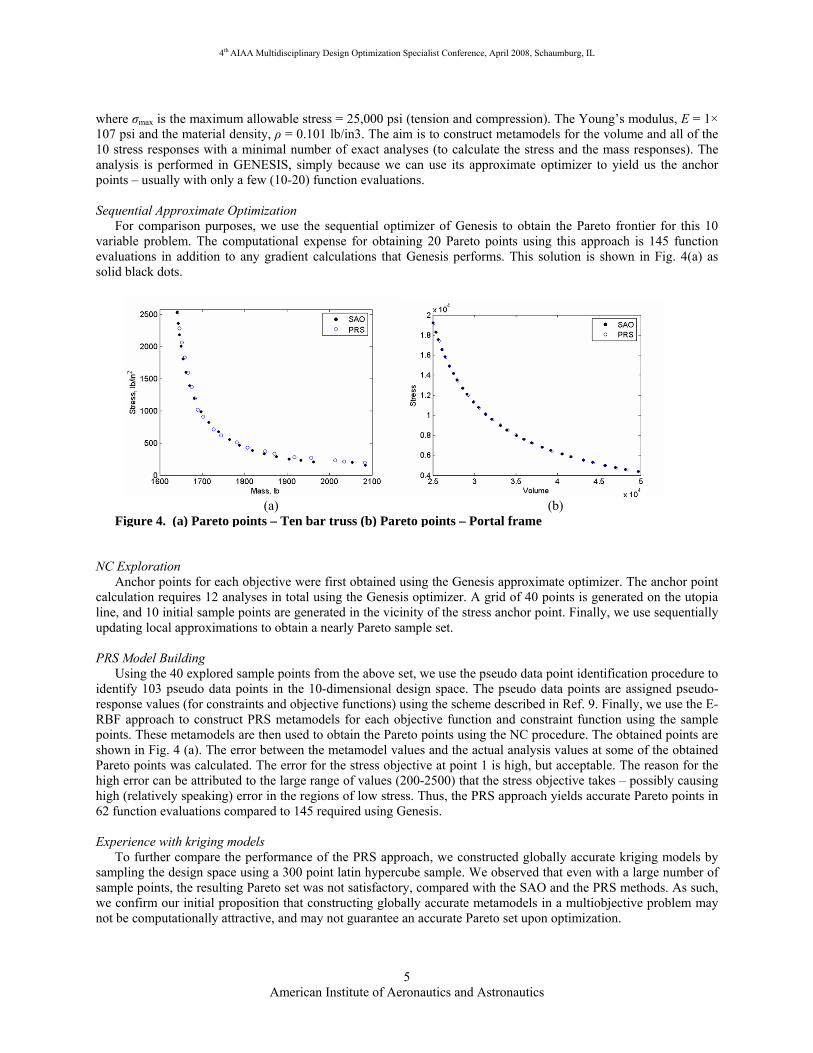
For comparison purposes, we use the sequential optimizer of Genesis to obtain the Pareto frontier for this 10 variable problem. The computational expense for obtaining 20 Pareto points using this approach is 145 function evaluations in addition to any gradient calculations that Genesis performs. This solution is shown in Fig. 4(a) as solid black dots.
NC Exploration
Anchor points for each objective were first obtained using the Genesis approximate optimizer. The anchor point calculation requires 12 analyses in total using the Genesis optimizer. A grid of 40 points is generated on the utopia line, and 10 initial sample points are generated in the vicinity of the stress anchor point. Finally, we use sequentially updating local approximations to obtain a nearly Pareto sample set. PRS Model Building
Using the 40 explored sample points from the above set, we use the pseudo data point identification procedure to identify 103 pseudo data points in the 10-dimensional design space. The pseudo data points are assigned pseudo-response values (for constraints and objective functions) using the scheme described in Ref. 9. Finally, we use the E-RBF approach to construct PRS metamodels for each objective function and constraint function using the sample points. These metamodels are then used to obtain the Pareto points using the NC procedure. The obtained points are shown in Fig. 4 (a). The error between the metamodel values and the actual analysis values at some of the obtained Pareto points was calculated. The error for the stress objective at point 1 is high, but acceptable. The reason for the high error can be attributed to the large range of values (200-2500) that the stress objective takes – possibly causing high (relatively speaking) error in the regions of low stress. Thus, the PRS approach yields accurate Pareto points in 62 function evaluations compared to 145 required using Genesis. Experience with kriging models
To further compare the performance of the PRS approach, we constructed globally accurate kriging models by sampling the design space using a 300 point latin hypercube sample. We observed that even with a large number of sample points, the resulting Pareto set was not satisfactory, compared with the SAO and the PRS methods. As such, we confirm our initial proposition that constructing globally accurate metamodels in a multiobjective problem may not be computationally attractive, and may not guarantee an accurate Pareto set upon optimization.
(a) (b)
Figure 4. (a) Pareto points – Ten bar truss (b) Pareto points – Portal frame
4th AIAA Multidisciplinary Design Optimization Specialist Conference, April 2008, Schaumburg, IL
American Institute of Aeronautics and Astronautics
6
Example 4: Portal frame design
This problem is an example problem from the user’s manual of the structural optimization software GENESIS10. The motivation behind choosing this problem is its moderately high number of design variables – 18, and constraints – 12. The problem involves designing the cross-sectional dimensions of each member of the structure shown in Fig. 3 (bottom). Each component has an unsymmetrical I-beam cross section (section A-A), and the structure is loaded with a point load (P = 50, 000) as shown. The analysis is performed within Genesis, which is also used to calculate the locations of the anchor points.
The cross-sectional dimensions of each component (six each) are the design variables. The bending stress response at four points (two at the top and two at the bottom of the cross-section) for each component is constrained to be less than the maximum permissible stress. We formulate a multiobjective design problem to minimize the volume of the frame and the stress in beam 1, subject to the stress constraints, as follows.
[ ]1
max
min
. ., 1,..,12
50000
x
i
V
s ti
V
σ
σ σ≤ =
≤
(2)
NC Exploration
As mentioned above, the sequential approximate optimizer within Genesis was used to obtain the anchor points with respect to each design objective. A total of 14 exact analyses were required for this purpose. An initial sample of 10 points was then constructed in the vicinity of the anchor point corresponding to the stress objective. A grid of 30 points is then constructed on the utopia line followed by the NC exploration procedure. Figure 4(b) shows the Pareto optimal points obtained using the SAO approach (using the built-in sequential optimizer in Genesis). The computational expense (function evaluations) for each approach is provided in Table 1. One can see that the PRS approach requires almost an order-of-magnitude fewer function evaluations compared to SAO. We can further construct metamodels for the objective functions and constraints in order to provide better control over the decision making process. However, since the PRS results appear to be highly accurate after the exploration phase itself, we do not need to construct the PRS metamodels for this case.
Example 5: Mathematical example – five objectives
We demonstrate the PRS approach on a five objective mathematical problem. Figure 5 shows the PRS exploration process applied to the five-objective multiobjective problem defined in Eq. 3. Each radial plot in the figure corresponds to a single point in a five-dimensional objective ( μ ) space. The top row shows five representative Pareto points, while the bottom row shows the corresponding points obtained using the PRS normal constraint exploration process. As the figure shows, the explored points closely match the actual Pareto points.
Table 1. Function evaluation comparison: Traditional and PRS
Example # vars. Globally accurate/SAO
PRS function evaluations
1 7 150 70 2 7 150 94 3 10 145 62 4 18 215 54
4th AIAA Multidisciplinary Design Optimization Specialist Conference, April 2008, Schaumburg, IL
American Institute of Aeronautics and Astronautics
7
[ ]
( )( ) ( ) ( ) ( ) ( )
1 2 3 4 5
4 4 4 4 41 2 3 4 5
min
. ., 1..5
1 1 1 1 1 1
x
i i
s tx i
μ μ μ μ μ
μ
μ μ μ μ μ
= =
− + − + − + − + − ≤
(3)
B. Disjoint Pareto frontiers Disjointedness in the objective and/or the design space can occur due to multimodality of the objective functions
or the constraints or both. Multimodality, especially in the Pareto region, translates into disjoint Pareto sets in the objective space or the design variable space. Interestingly, the PRS approach can be used, with due care, for problems with disjoint Pareto frontiers, as well.
A simple way to understand this is through a bi-objective example where the entire Pareto frontier is the
constraint boundary:
[ ]
( )211
1 2
0.5 32
min
. .
( ) 5 2 00 5
x
xx
x x
s t
g x e e xx
− −−= + − ≤≤ ≤
(4)
However, because of the nature of the constraint function, part of the constraint boundary is non-Pareto (see Fig.
6) – giving rise to a disjoint Pareto frontier. Such a case needs careful handling using the NC exploration approach. We need to ensure that the region of non-Pareto optimality is also captured during the exploration (sampling) phase. No significant changes need to be made to the exploration process, however, a finer resolution of the utopia line points is recommended, so that the entire constraint boundary is captured. Figure 6 (left) shows the explored points for the above problem, where the actual constraint boundary is plotted for reference.
4th AIAA Multidisciplinary Design Optimization Specialist Conference, April 2008, Schaumburg, IL
American Institute of Aeronautics and Astronautics
8
The PRS model for the constraint function does not require any special handling, and it is constructed using the
metamodel construction procedure for constraints discussed before. Finally, the results of using a multiobjective optimizer to obtain the final Pareto points are shown in Fig. 6 (right). As we can see, the PRS model is able to accurately capture the disjoint nature of the Pareto frontier.
From the results of the simple example presented above, we can make a few general observations. The PRS approach can be effectively used for multiobjective optimization problems with disjoint Pareto frontiers. However, one requirement appears to be that the feasible space of the problem (g(x) ≤ 0) should be continuous. In other words, the region of discontinuity of the Pareto frontier should correspond to the feasible region (as was the case in the example above). This would allow the NC exploration approach to traverse the discontinuity in the Pareto frontier – although this may result in some non-Pareto sample points. These may or may not be included in the sample points used to construct the PRS models.
C. Numerical Experience With Parameter Settings Sample size
An important issue in the implementation of any metamodeling approach is the specification of an appropriate sample size. In most practical cases, the experience of the engineer needs to be trusted in order to specify an appropriate sample size. The metamodeling framework presented in this paper also requires the specification of a sample size. Recall that the sample size in the NC exploration approach is equal to the number of grid points generated on the utopia plane.
Typically, it is well-understood that more sample points are needed in the regions where the responses are more sensitive to the change in the design variables. For example, in a region where the response is predominantly linear, we may need only a few data points to capture the linear trend, whereas if the response is highly nonlinear in a particular region, it may need more sample points to accurately model the behavior. However, we note that the NC exploration under the PRS approach is unlike most other sampling-based metamodeling approaches. In this case, we generate a sample point by solving a sequentially updating local optimization problem in the vicinity of the Pareto frontier. As we shall see, although an initial estimate of the number of sample points on the utopia plane is required, it can be changed as the exploration progresses along the frontier.
For example, say, we have initially specified a distance of δ between two consecutive utopia line points. As we progress along the frontier, we might encounter a situation where the solution obtained by the local optimization problem may not be accurate, that is, the difference between the exact and approximate objective function and/or constraint function values may be more than some pre-specified tolerance. If so, we simply reject this sample point, and solve another local optimization problem with a reduced value of δ. The normal constraint in this case will likely yield a sample point that is more accurate. The exploration process can then progress from this newly obtained nearly Pareto point. Such an approach would automatically result in more sample points in the regions that are more sensitive than those where the objective functions and constraints do not change significantly. This topic can be pursued in more detail in the future extensions of the PRS approach. In general, however, the sample size is highly dependent on the sensitivity of the individual responses to the design variables along the Pareto frontier.
4th AIAA Multidisciplinary Design Optimization Specialist Conference, April 2008, Schaumburg, IL
American Institute of Aeronautics and Astronautics
9
Optimization parameters For all of the example problems in this paper, we have used the gradient-based optimizer in Matlab to solve the
metamodel-based optimization problem. The type of optimizer is generally not expected to have a significant impact on the quality of sample points obtained during the exploration process. However, the Matlab optimizer “fmincon” is known to be occasionally unstable. Therefore, we discuss our computational experience with some of the important optimization parameters. The examples solved in this paper are varied enough in terms of the number of design variables and the type of analysis (linear elastic, buckling) for us to make the generic observations that follow.
The NC exploration approach relies on the existence of an optimum such that the approximate normal constraint is active at the optimum. Thus, in most cases, this constraint will be a critical constraint that will guide the exploration process. As such, specifying an appropriate constraint satisfaction tolerance could be critical from the perspective of convergence. Note that for all the examples, we linearly transform the multiobjective space to a unit hypercube. Thus, the normal constraint is normalized by default, and it is numerically advisable to normalize all other constraints as well. Under such normalized circumstances, a constraint tolerance of 0.001 - 0.01 is generally adequate to ensure acceptable results. A smaller tolerance could potentially yield more accurate results. However, accuracy of the Pareto points is not critical during the exploration stage, as we merely desire what we term “nearly Pareto points”. Another benefit to using a loose tolerance on the constraints is that the resulting sample will contain both feasible and infeasible points all in the vicinity of the Pareto frontier. We can exploit this property of the sample during metamodel construction, such that the final Pareto points will be able to satisfy the constraints more closely. A loose constraint tolerance will generally promote a more evenly-spread sample, and will lead to more accurate PRS models. Normalization
We comment on the advantages of normalization (which is implemented for all of the examples in this paper) for effective NC exploration and model construction. A major source of problems in multiobjective optimization can be traced to the uneven scaling between the objective functions and/or design variables. Thus, for the algorithms presented in this paper to perform as expected, normalization (or scaling) of the relevant quantities is critical, and is always recommended.
A simple and commonly used scheme for objective function normalization is to minimize each objective
function to obtain the anchor points. Using the coordinates of these anchor points, the objective function space (that includes the Pareto frontier) is linearly transformed to lie within a unit hypercube. Mathematically, the transformed domain ( μ ) is given by
*
* *
( ) min( )
max mini
i j
ji j
i j j
jj
xx
μ μμ
μ μ
−=
− (5)
where the LHS denotes the coordinates of the anchor point for the j-th objective function. This step should be performed before the NC exploration algorithm is implemented. Thus, the nearly Pareto sample set generation would be performed in the normalized space, and the solutions would be mapped back to the original domain using the above transformation in reverse. We note that obtaining anchor points (although approximate) is one of the first steps under the NC exploration process, making such normalization possible.
Design variable scaling is also critical for the success of the NC exploration procedure. We follow the usual guidelines recommended for optimization algorithms, that is, all variable values should be between 1-10. This scaling is also beneficial from the perspective of metamodel construction – especially using RBFs (as used in this paper). Pseudo data point identification also shows more stability if the design variables are scaled appropriately.
III. Concluding Remarks and Future Work This paper provided some additional multiobjective design optimization examples that are solved using the PRS
approach developed by the authors. Two of the structural optimization problems were analyzed using Genesis, which allowed us to compare the results of the PRS approach with those using the sequential optimizer in Genesis. Overall, the results of this paper echo the discussion presented in the introduction, in that the PRS approach is a computationally efficient and accurate approach for solving expensive multiobjective problems. For the structural
4th AIAA Multidisciplinary Design Optimization Specialist Conference, April 2008, Schaumburg, IL
American Institute of Aeronautics and Astronautics
10
problems of this paper, we have demonstrated a computational saving of almost 70% in terms of the number of function evaluations over traditional approaches. Future work involves applying the PRS approach to large-scale multiobjective problems, and on problems with numerical noise in the objective function and constraints.
Acknowledgments Sponsorship of this work by the National Science Foundation through awards numbers ENG-CMMI-0533330
and ENG-CMMI-0333568 is gratefully acknowledged.
References 1Giunta A.A., Balabanov V., Haim D., Grossman B., Mason W.H., Watson L.T., and Haftka R.T., “Multidisciplinary
Optimisation of a Supersonic Transport Using Design of Experiments Theory and Response Surface Modeling,” The Aeronautical Journal, Vol. 101, No. 1008, 1997, pp. 347–356.
2Mullur A.A. and Messac A, “Extended Radial Basis Functions: More Flexible and Effective Metamodeling,” AIAA Journal, Vol. 43, No. 6, 2005, pp. 1306–1315.
3Sacks J., Welch W., Mitchell T.J., and Wynn H.P, “Design and Analysis of Computer Experiments,” Statistical Science, Vol. 4, No. 4, 1989, pp. 409–423.
4Simpson T.W., Peplinski J.D., Koch P.N., and Allen J.K, “Metamodels for Computer-based Engineering Design: Survey and Recommendations,” Engineering with Computers, Vol. 17, No. 2, 2001, pp. 129–150.
5Wilson B., Cappelleri D., Simpson T.W., and Frecker M., “Efficient Pareto Frontier Exploration Using Surrogate Approximations,” Optimization and Engineering, Vol. 2, 2001, pp. 31–50.
6Yang B.S., Yeun Y.N., and Ruy W.S., “Managing Approximation Models in Multiobjective Optimization,” Structural and Multidisciplinary Optimization, Vol. 24, No. 2, 2002, 141–156.
7Messac A. and Mullur A.A., “A Computationally Efficient Metamodeling Approach for Expensive Multiobjective Optimization,” Optimization and Engineering, Vol. 9, No. 1, 2008, pp. 1-93.
8Messac A. and Mullur A.A., “Pseudo Response Surface (PRS) Methodology: Collapsing Computational Requirements,” 10th Multidisciplinary Analysis and Optimization Conference, Albany, NY, Paper No. AIAA-2004-4376, Aug. 30 – Sept. 1, 2004.
9Mullur A.A., “A New Response Surface Paradigm For Computationally Efficient Multiobjective Optimization,” Ph.D. Dissertation, Mechanical Engineering, Rensselaer Polytechnic Institute, Troy, NY, 2005.
10Vanderplaats R&D, “Genesis: Structural Analysis and Optimization,” Version 7.0, User Manual, Volume II, August 2001. 11Kurpati A., Azarm S., and Wu J., “Constraint Handling Improvements for Multiobjective Genetic Algorithms,” Structural
and Multidisciplinary Optimization, Vol. 23, No. 3, 2002, pp. 204–213. 12Mullur A.A. and Messac A., “Extended Radial Basis Functions: More Flexible and Effective Metamodeling,” AIAA
Journal, 2005, Vol. 43, No. 6, pp. 1306–1315. 13Zhang W.H. and Yang H.C., “Efficient Gradient Calculation of the Pareto Optimal Curve in Multicriteria Optimization,”
Structural and Multidisciplinary Optimization, 2002, Vol. 23, No. 4, pp. 311–319.