ANÁLISE COMPARATIVA DE MODELOS ANALÍTICOS PARA PREDIÇÃO DO TEMPO DE VIDA DE BATERIAS EM DISPOSITIVOS MÓVEIS Keila Kleveston Schneider 1 , Paulo Sausen 1 , Airam Sausen 1 1 Mestrado em Modelagem Matemática - MMM, Universidade Regional do Noroeste do Estado do Rio Grande do Sul - UNIJUÍ, Ijuí, Brasil, [email protected], [email protected], [email protected]Abstract: The main purpose of this paper is the mod- elling and simulation of the energy consumption of a sensor node. As case study, a comparison between the results obtained with the evaluation of battery capac- ity when two analytical models of battery are used is realized. Keywords: Battery, life time, analytical models. 1. INTRODUÇÃO Nas últimas décadas, o número médio de disposi- tivos móveis por cidadão tem aumentado significativa- mente, devido à proliferação no acesso à tecnologia sem fio. Estes dispositivos podem ser encontrados nas mais diversas áreas, tais como, na indústria, no comércio, nos setores de educação e saúde. Alguns exemplos de dispositivos móveis são: telefones celulares, máquinas digitais, notebooks (i.e., computadores portáteis), sen- sores de alarmes instalados em residências ou prédios comerciais, entre outros. A grande maioria dos dispositivos móveis utiliza- dos é alimentada por algum tipo de bateria, geral- mente recarregável, cuja função é o fornecimento de energia. Destaca-se que o uso dos dispositivos móveis está condicionado ao tempo de vida das baterias que os alimentam. Este tempo de vida é por definição o tempo que a bateria demora para atingir um determi- nado nível de capacidade de carga (i.e., nível de cutoff ), ao alcançar este nível as reações eletroquímicas, que são responsáveis pelo fornecimento de energia, cessam e consequentemente a bateria deixa de fornecer ener- gia ao sistema, sendo considerada descarrega. Neste contexto, é de vital importância possuir algum método capaz de predizer o tempo de vida da bateria e por con- seguinte o comportamento dinâmico do sistema como um todo. Uma das formas de realizar a predição do tempo de vida é utilizar um modelo matemático que repre- senta adequadamente o processo, ou seja, que descreva a descarga de energia do sistema. Diferentes mode- los de baterias têm sido desenvolvidos ao longo dos anos. Destacam-se os modelos eletroquímicos [2, 3] que baseiam-se nos processos químicos que ocorrem na bateria, e são descritos com grande detalhamento sendo considerados mais precisos. No entanto, a sua descrição detalhada torna os mesmos complexos e de difícil implementação, devido à grande quantidade de parâmetros que devem ser fornecidos pelo usuário. Os modelos de circuitos elétricos [2, 3] são modelos de carga variável, que são capazes de modelar a taxa de capacidade e os efeitos térmicos da bateria. Con- tudo, nenhum dos modelos de circuitos elétricos con- sideram o efeito de recuperação. Esta classe de modelos de bateria apresenta simulação de fácil entendimento, realizadas em simuladores de circuito. Tais modelos têm sido utilizados na prática para analisar muitas tec- nologias de bateria. Embora estes modelos sejam mais simples quando comparados aos modelos eletroquími- cos, e computacionalmente menos caros, ainda neces- sitam algum esforço para a configuração do seu cir- cuito elétrico, especialmente para a criação de tabelas de pesquisa que exigem muitos dados experimentais acerca do comportamento da bateria. Além disso, os modelos elétricos são menos precisos quando compara- dos aos eletroquímicos. Existem também os mode- los estocásticos [1, 2] que modelam o comportamento da bateria como um processo estocástico discreto no tempo, onde o estado do processo representa o estado de carga da bateria, estes modelos têm como objetivo descrever a bateria de uma forma abstrata. Há também os modelos analíticos [2, 3], que assim como os modelos estocásticos, descrevem a bateria em um nível mais elevado de abstração do que os modelos eletroquímicos e elétricos. As principais propriedades da bateria são modeladas utilizando um conjunto re- duzido de equações tornando a implementação, deste Proceedings of the 9th Brazilian Conference on Dynamics Control and their Applications Serra Negra, SP - ISSN 2178-3667 994
Transcript
ANÁLISE COMPARATIVA DEMODELOS ANALÍTICOS PARA PREDIÇÃO DO TEMPODE VIDA DE BATERIAS EM DISPOSITIVOS MÓVEIS
Keila Kleveston Schneider1, Paulo Sausen1, Airam Sausen1
Abstract: The main purpose of this paper is the mod-elling and simulation of the energy consumption of asensor node. As case study, a comparison between theresults obtained with the evaluation of battery capac-ity when two analytical models of battery are used isrealized.
Keywords: Battery, life time, analytical models.
1. INTRODUÇÃO
Nas últimas décadas, o número médio de disposi-tivos móveis por cidadão tem aumentado significativa-mente, devido à proliferação no acesso à tecnologia semfio. Estes dispositivos podem ser encontrados nas maisdiversas áreas, tais como, na indústria, no comércio,nos setores de educação e saúde. Alguns exemplos dedispositivos móveis são: telefones celulares, máquinasdigitais, notebooks (i.e., computadores portáteis), sen-sores de alarmes instalados em residências ou prédioscomerciais, entre outros.
A grande maioria dos dispositivos móveis utiliza-dos é alimentada por algum tipo de bateria, geral-mente recarregável, cuja função é o fornecimento deenergia. Destaca-se que o uso dos dispositivos móveisestá condicionado ao tempo de vida das baterias queos alimentam. Este tempo de vida é por definição otempo que a bateria demora para atingir um determi-nado nível de capacidade de carga (i.e., nível de cutoff ),ao alcançar este nível as reações eletroquímicas, quesão responsáveis pelo fornecimento de energia, cessame consequentemente a bateria deixa de fornecer ener-gia ao sistema, sendo considerada descarrega. Nestecontexto, é de vital importância possuir algum métodocapaz de predizer o tempo de vida da bateria e por con-seguinte o comportamento dinâmico do sistema comoum todo.
Uma das formas de realizar a predição do tempode vida é utilizar um modelo matemático que repre-
senta adequadamente o processo, ou seja, que descrevaa descarga de energia do sistema. Diferentes mode-los de baterias têm sido desenvolvidos ao longo dosanos. Destacam-se os modelos eletroquímicos [2, 3]que baseiam-se nos processos químicos que ocorremna bateria, e são descritos com grande detalhamentosendo considerados mais precisos. No entanto, a suadescrição detalhada torna os mesmos complexos e dedifícil implementação, devido à grande quantidade deparâmetros que devem ser fornecidos pelo usuário.
Os modelos de circuitos elétricos [2, 3] são modelosde carga variável, que são capazes de modelar a taxade capacidade e os efeitos térmicos da bateria. Con-tudo, nenhum dos modelos de circuitos elétricos con-sideram o efeito de recuperação. Esta classe demodelosde bateria apresenta simulação de fácil entendimento,realizadas em simuladores de circuito. Tais modelostêm sido utilizados na prática para analisar muitas tec-nologias de bateria. Embora estes modelos sejam maissimples quando comparados aos modelos eletroquími-cos, e computacionalmente menos caros, ainda neces-sitam algum esforço para a configuração do seu cir-cuito elétrico, especialmente para a criação de tabelasde pesquisa que exigem muitos dados experimentaisacerca do comportamento da bateria. Além disso, osmodelos elétricos são menos precisos quando compara-dos aos eletroquímicos. Existem também os mode-los estocásticos [1, 2] que modelam o comportamentoda bateria como um processo estocástico discreto notempo, onde o estado do processo representa o estadode carga da bateria, estes modelos têm como objetivodescrever a bateria de uma forma abstrata.
Há também os modelos analíticos [2, 3], que assimcomo os modelos estocásticos, descrevem a bateria emum nível mais elevado de abstração do que os modeloseletroquímicos e elétricos. As principais propriedadesda bateria são modeladas utilizando um conjunto re-duzido de equações tornando a implementação, deste
Proceedings of the 9th Brazilian Conference on Dynamics Control and their Applications Serra Negra, SP - ISSN 2178-3667 994
tipo de modelo, mais simples quando comparado comos modelos citados anteriormente.
Muitos destes modelos podem incluir modelos decarga constante e de carga variável, conseguindo cap-turar o efeito da taxa de capacidade, e o efeito de re-cuperação. Eles são computacionalmente eficientes eflexíveis, requerendo avaliação de simples expressõesanalíticas, e podem ser facilmente configurados paradiferentes tipos de baterias. O modelo analítico maissimples é o modelo linear [1, 2, 7], que considera ape-nas correntes de descargas constantes no tempo, mode-lando a bateria apenas como um recipiente de energia,onde a corrente é decrementada de forma linear. Hátambém a Lei de Peukert [2–4, 9], que trabalha coma média das correntes, resultando em tempos de vidamuito parecidos com os tempos de vida do modelo li-near.
Por outro lado, a utilização de modelos lineares nãopermite que sejam realizadas aproximações satisfató-rias, especialmente quando são considerados os aspec-tos físicos das operações de descarga da bateria. Es-tudos recentes em baterias [1–3] têm revelado que astaxas de descarga são não-lineares no tempo e, alémdisso, dependem da capacidade residual da bateria, ouseja, para diferentes perfis de descarga têm-se diferen-tes tempos de vida, assim, a capacidade efetiva da ba-teria não é a mesma para diferentes perfis de descarga.Entende-se por perfil de descarga o conjunto de opera-ções que um determinado dispositivo pode realizar emum determinado intervalo de tempo. Por exemplo, umsensor pode receber e transmitir informações, sendoque para receber tem-se uma taxa de consumo difer-ente da taxa de transmissão. Além disso, em períodosociosos (i.e., quando a corrente de descarga é reduzidasignificativamente ou mesmo é nula), ocorre um sutil,mas importante efeito de recuperação, que pode recu-perar a capacidade da bateria [1].
Neste contexto, ressalta-se a importância da uti-lização de um modelo matemático acurado que con-sidere, entre outras características, as característicasnão-lineares e seus efeitos na capacidade da bateria, es-pecialmente quando o objetivo final é predizer o tempode vida da mesma.
Neste trabalho será utilizado o modelo de bateriaanalítico de difusão de Rakhmatov-Vrudhula [8] paraestimar o tempo de vida de uma bateria. Este modelofoi escolhido em virtude do mesmo conseguir capturaro efeito de taxa de capacidade e o efeito de recupe-ração, bem como ser de fácil implementação quandocomparado aos demais modelos citados [7].
O restante deste trabalho está organizado comosegue. Na Seção 2 são apresentadas algumas carac-terísticas e conceitos básicos que envolvem uma bate-ria. Na Seção 3 é descrita a modelagem matemáticado processo. Na Seção 4 são apresentados os resulta-dos das simulações entre o modelo linear e o modelode Rakhmatov-Vrudhula e sua análise. E por fim, naSeção 5 são apresentadas as conclusões.
2. BATERIAS
Uma bateria é constituída por uma ou mais célu-las eletroquímicas, ligadas em série ou em paralelo, ouainda através de uma combinação de ambas. Nestascélulas a energia química armazenada é convertida emenergia elétrica através de uma reação eletroquímica.Na Figura 1 é apresentado o esquema de uma célulaeletroquímica, onde cada célula é formada por doiseletrodos1: um ânodo que possui polaridade negativae um cátodo que possui polaridade positiva, separadospor um eletrólito2. Durante a fase de descarga (i.e.,quando a bateria fornece corrente elétrica a um cir-cuito externo) o ânodo libera elétrons para o circuito,enquanto o cátodo recebe elétrons do circuito. Esteselétrons têm origem a partir de reações eletroquímicase são chamados de espécies eletroativas [2, 7].
Figure 1 – Esquema de uma célula eletroquímica [2].
2.1. Propriedades das Baterias
Uma bateria possui duas importantes propriedades,que são: (i) a voltagem, medida em volts (V); e (ii) acapacidade, geralmente medida em ampere-hora (Ah).O produto destas duas grandezas fornece a quantidadede energia armazenada na bateria [1]. Por exemplo,teoricamente, uma bateria de 100 Ah é projetada parafornecer 5 A por 20 horas, ou então, 100 A durante 1hora. Porém, essa representação é teórica, na prática,geralmente, a corrente de descarga não é constante notempo, ou seja, as operações de descarga têm carac-terísticas não-lineares no tempo e conseqüentementeocorrem efeitos não-lineares que influenciam direta-mente no tempo de vida da bateria. Estes efeitos serãodescritos na próxima seção.
2.2. Características não-lineares
Amodelagem do comportamento de baterias é com-plexa, devido aos efeitos não-lineares que ocorrem
1Condutor metálico por onde uma corrente elétrica entra ou saido sistema.
2Condutor de eletricidade, sólido ou líquido, no qual o transportede carga se realiza por meio de íons.
Proceedings of the 9th Brazilian Conference on Dynamics Control and their Applications Serra Negra, SP - ISSN 2178-3667 995
durante o período de descarga. No caso ideal, atensão permanece constante durante todo o períodode descarga, tornando-se zero quando a bateria estádescarregada. O ideal seria que a capacidade fosseconstante para qualquer corrente de descarga, e quetoda a energia armazenada na bateria fosse utilizada.Contudo, em um procedimento de descarga em umabateria real a tensão é reduzida lentamente durante adescarga e a capacidade efetiva é reduzida para altascorrentes. Alguns dos efeitos não-lineares que ocor-rem durante a descarga da bateria são apresentadosnas próximas sub-seções. Ressalta-se que tais efeitosocorrem em todos os tipos de baterias. No entanto, de-pendendo do tipo de bateria, estes efeitos têm maioresou menores consequências na sua capacidade [1, 2].A seguir são descritas três importantes característicasnão-lineares presentes na descarga de uma bateria.
(A) Efeito de RecuperaçãoDefine-se por efeito de recuperação de uma bate-
ria a reorganização dos elétrons no eletrólito duranteum período de relaxação, ou seja, intervalo de tempoem que a corrente de descarga é reduzida significativa-mente. Neste intervalo os elétrons se reorganizam demaneira uniforme no eletrólito, de modo que o sistemarecupere o equilíbrio e o gradiente de concentração sejanulo na superfície do eletrodo. Assim, a capacidadeefetiva da bateria é aumentada, pois uma maior quan-tidade de carga torna-se disponível antes do sistemaalcançar o nível de cutoff (i.e., quando a bateria estádescarregada).
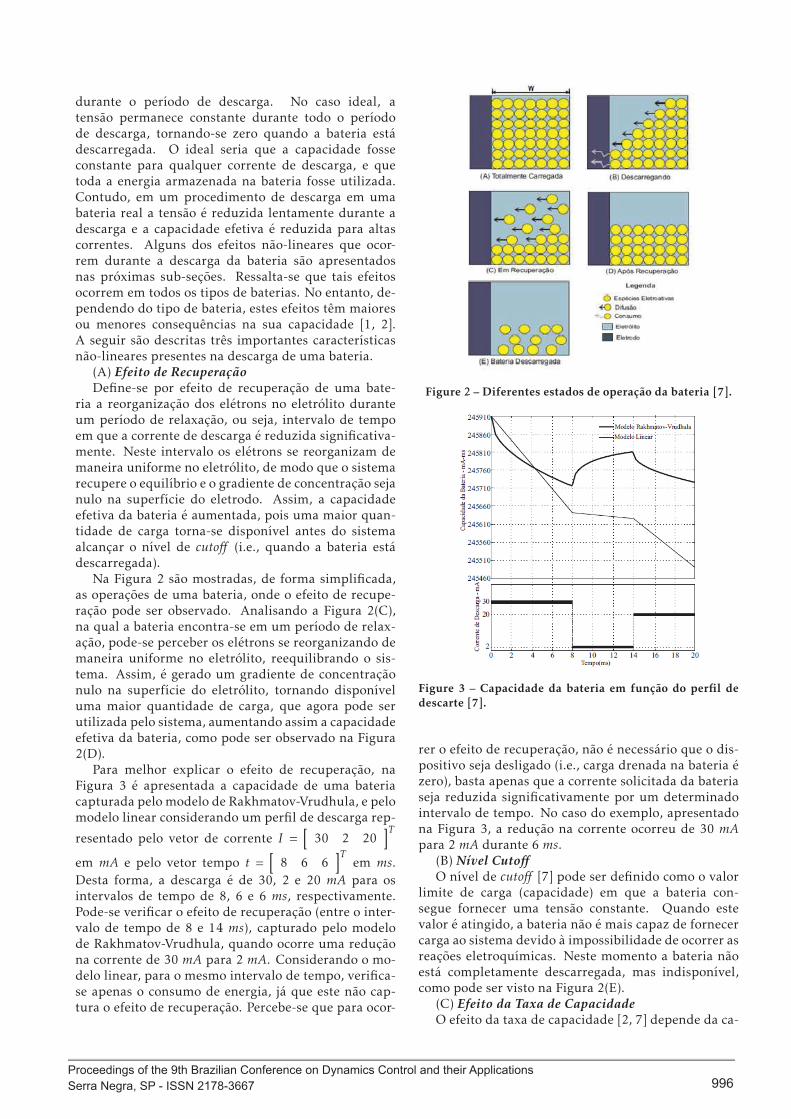
Na Figura 2 são mostradas, de forma simplificada,as operações de uma bateria, onde o efeito de recupe-ração pode ser observado. Analisando a Figura 2(C),na qual a bateria encontra-se em um período de relax-ação, pode-se perceber os elétrons se reorganizando demaneira uniforme no eletrólito, reequilibrando o sis-tema. Assim, é gerado um gradiente de concentraçãonulo na superfície do eletrólito, tornando disponíveluma maior quantidade de carga, que agora pode serutilizada pelo sistema, aumentando assim a capacidadeefetiva da bateria, como pode ser observado na Figura2(D).
Para melhor explicar o efeito de recuperação, naFigura 3 é apresentada a capacidade de uma bateriacapturada pelo modelo de Rakhmatov-Vrudhula, e pelomodelo linear considerando um perfil de descarga rep-
resentado pelo vetor de corrente I =[
30 2 20]T
em mA e pelo vetor tempo t =[
8 6 6]T
em ms.Desta forma, a descarga é de 30, 2 e 20 mA para osintervalos de tempo de 8, 6 e 6 ms, respectivamente.Pode-se verificar o efeito de recuperação (entre o inter-valo de tempo de 8 e 14 ms), capturado pelo modelode Rakhmatov-Vrudhula, quando ocorre uma reduçãona corrente de 30 mA para 2 mA. Considerando o mo-delo linear, para o mesmo intervalo de tempo, verifica-se apenas o consumo de energia, já que este não cap-tura o efeito de recuperação. Percebe-se que para ocor-
Figure 2 – Diferentes estados de operação da bateria [7].
Figure 3 – Capacidade da bateria em função do perfil dedescarte [7].
rer o efeito de recuperação, não é necessário que o dis-positivo seja desligado (i.e., carga drenada na bateria ézero), basta apenas que a corrente solicitada da bateriaseja reduzida significativamente por um determinadointervalo de tempo. No caso do exemplo, apresentadona Figura 3, a redução na corrente ocorreu de 30 mApara 2 mA durante 6 ms.
(B) Nível CutoffO nível de cutoff [7] pode ser definido como o valor
limite de carga (capacidade) em que a bateria con-segue fornecer uma tensão constante. Quando estevalor é atingido, a bateria não é mais capaz de fornecercarga ao sistema devido à impossibilidade de ocorrer asreações eletroquímicas. Neste momento a bateria nãoestá completamente descarregada, mas indisponível,como pode ser visto na Figura 2(E).
(C) Efeito da Taxa de CapacidadeO efeito da taxa de capacidade [2, 7] depende da ca-
Proceedings of the 9th Brazilian Conference on Dynamics Control and their Applications Serra Negra, SP - ISSN 2178-3667 996
pacidade atual da bateria e da intensidade da correntede descarga, ou seja, com uma alta corrente de descargaa capacidade efetiva da bateria é baixa, pois não hátempo suficiente para a reorganização dos elétrons noeletrólito (i.e., efeito de recuperação) reduzindo, destaforma, a capacidade da bateria. Já com correntes al-ternadas, a capacidade efetiva da bateria é aumentada,pois na troca de uma corrente alta para uma correntebaixa, ou até mesmo para um período sem corrente,ocorre a reorganização dos elétrons no eletrólito (i.e.,efeito de recuperação), aumentando, assim, a capaci-dade efetiva da bateria. Ressalta-se que esta capacidadenunca será maior, nem igual, à capacidade inicial.
2.3. Capacidade da Bateria
A capacidade de uma bateria é especificada pelaquantidade de materiais ativos nela presente. Esta ca-pacidade pode ser expressa de três maneiras diferen-tes [3, 7]:
1. Capacidade Teórica: baseia-se na quantidade deenergia armazenada sendo o limite máximo de energiaque pode ser extraída na prática;
2. Capacidade Padrão: é a energia que pode ser ex-traída sob condições especificadas pelo fabricante;
3. Capacidade Atual: pode exceder a capacidadepadrão, mas não pode exceder a capacidade teórica deuma bateria.
O desempenho de uma bateria em relação ao per-fil de corrente de descarga depende de dois efeitos: (i)efeito de taxa de capacidade, que depende da capaci-dade atual da bateria, e da intensidade da sua correntede descarga; (ii) efeito de recuperação, que depende darecuperação da capacidade durante períodos ociosos,ou seja, períodos em que a corrente solicitada é re-duzida significativamente.
3. MODELAGEMMATEMÁTICA
Nesta seção é apresentado o modelo matemáticoanalítico de Rakhmatov-Vrudhula que, entre outras ca-racterísticas, considera os efeitos não-lineares da ba-teria. O processo de difusão unidimensional do mo-delo é descrito pelas leis de Fick dadas pelo sistema deEquações Diferenciais Parciais (EDPs) apresentado nasequações (1) e (2)
−J(x, t) =D∂C(x, t)
∂x, (1)
∂C(x, t)∂t
=D∂2C(x, t)
∂2x, (2)
onde J(x, t) é o fluxo das espécies eletroativas em funçãodo tempo t e em função de uma distância x do eletrodo,eD é a constante de difusão. Seja C(x, t) a concentraçãode espécies eletroativas no tempo t ∈ [0,L] e na distân-cia x ∈ [0,w] do eletrodo. Para uma bateria completa-mente carregada (i.e., t = 0), a concentração de espécieseletroativas é constante através do comprimento do ele-trólito, proporcionando a seguinte condição inicial
C(x,0) = C∗. (3)
A bateria é considerada descarregada quando C(0, t)é inferior ao nível de cutoff. De acordo com a Lei deFaraday, o fluxo na superfície do eletrodo (x = 0) é pro-porcional à corrente i(t) (i.e., carga externa aplicada),e o fluxo na outra extremidade da região de difusão(x = w) é zero. Estas proposições fornecem as seguintescondições de fronteira
i(t)vFA
=D∂C(x, t)
∂x|x=0, (4)
0 =D∂C(x, t)
∂x|x=w, (5)
onde A é a área da superfície do eletrodo, F é a cons-tante de Faraday’s, e v é o número de elétrons envolvi-dos na reação eletroquímica na superfície do eletrodo.
É possível obter uma solução analítica para a EDPdada pela equação (2) e suas respectivas, condição ini-cial equação (3) e condições de fronteira equações (4)e (5), através da aplicação da transformada de Laplacee suas definições. Então, aplicando a transformada deLaplace na equação (2) obtém-se
sC(x,s)−C(x,0) =D∂2C(x,s)
∂x2,
C” − s
DC = −C
∗
D. (6)
A equação (6) é uma Equação Diferencial Ordinária(EDO) de segunda ordem, não-homogênea, cujasolução é dada por:
C(x,s) =C∗
s+Ae√
sD x +Be−
√sD x. (7)
Porém, estamos interessados somente na concentraçãona superfície do eletrodo, ou seja, em x = 0, entãoobtém-se
C(0, s) =C∗
s+A+B. (8)
Em seguida deriva-se a equação (7)
dC(x,s)dx
= −√
s
D(Be−√
sD x −Ae
√sD x) (9)
para que sejam aplicadas as condições de fronteira econsequentemente calculados os valores das constantesA e B.
Aplicando a transformada de Laplace nas condiçõesde fronteira dadas pelas equações (4) e (5) e substitu-indo os resultados na equação (9), obtém-se o seguintesistema de equações
I(s)vFAD
= −√
s
D(B−A),
0 = −√
s
D(Be−√
sD w −Ae
√sD w).
Proceedings of the 9th Brazilian Conference on Dynamics Control and their Applications Serra Negra, SP - ISSN 2178-3667 997
A resolução deste sistema de equações é dado por
C(0, s) =C∗
s−√D
vFADI(s)
cosh( w√D√s)
√s sinh( w√
D
√s). (10)
Aplicando a transformada de Laplace Inversa naequação (10), obtém-se
C(0, t) = C∗ − 1vFAw
∫ t
0i(τ)[1+
2∑∞
m=1 e−m2π2
w2D(t−τ)].
(11)
Dividindo a equação (11) pela condição inicial C∗ econsiderando
ρ(t) = 1− C(0, t)C∗
, (12)
a fração de decaimento da concentração de espécieselétroativas na fronteira x = 0, a equação (11) torna-se
ρ(t) = 1vFAwC∗ [
∫ t
0i(τ)dτ+
2∑∞
m=1 i(τ)e−m2π2
w2D(t−τ)
dτ].
(13)
Considerando
β =π√D
w(14)
o parâmetro que está relacionado ao comportamentonão-linear da bateria, e
α = vFAwC∗ρ(L) (15)
o parâmetro que está relacionado a capacidade da ba-teria, obtém-se a seguinte expressão geral
α =∫ L
0i(τ) + 2
∞∑
m=1
∫ L
0i(τ)e−β
2m2(L−τ)dτ, (16)
que relaciona o tempo de vida da bateria L para umperfil de carga i(t), onde os parâmetros β e α neces-sitam ser estimados. Neste trabalho será utilizado osparâmetros de uma bateria alcalina, estimados a partirda técnica de mínimos quadrados [7].
Em seguida, considera-se uma taxa de descarga vari-ante no tempo, aproximada por uma carga constantepor partes, dada por
i(t) =n
∑
k=1
Ik−1[U(t − tk−1)−U(t − tk)], (17)
onde Ik é a carga constante; U(t) é uma função degrau,com U(t) = 1 se t > 0, enquanto U(t) = 0 se t < 0. Por-tanto, a equação (17) no intervalo [0, t] pode ser descritacomo uma função de "n" degraus [12].
Substituindo a equação (17) na equação (16) é en-contrada uma relação entre o tempo de vida da bateriaL e a carga varíável i(t) no intevalo [0,L] dada por umafunção de n degraus dada por
α =M∑
k=1
2Ik−1A(L, tk , tk−1,B). (18)
4. SIMULAÇÃO DO MODELO DE RAKHMATOVPARA UMA BATERIA ALCALINA
Nesta seção, será apresentado um estudo compara-tivo, a partir da realização de simulações, entre o mo-delo linear e o modelo de descarga de Rakhmatov-Vrudhula, com o objetivo de demonstrar a diferençade consumo apresentado pela utilização do primeiro(i.e., linear), que não considera as características não-lineares no descarregamento da bateria, em relação aosegundo (i.e., Rakhmatov-Vrudhula), modelo mais acu-rado que considera tais efeitos. Para tanto será uti-lizado um mesmo perfil de descarga, que contém asoperações básicas3 realizadas por um nó sensor.
4.1. Definição do Perfil de Descarga
Conforme mencionado anteriormente, será definidoum perfil de descarga de uma bateria para ser uti-lizado nas simulações. Todos os parâmetros de simula-ção (Tabela 1) são obtidos a partir da especificação dossensores da família Mica Motes [11]. A família MicaMotes é uma familia de nós sensores amplamente uti-lizada em pesquisas que envolve o conceito de Redesde Sensores Sem Fio (RSSF).
Para definir o tempo de transmissão e recepção queforam utilizados no perfil de descarga da bateria, foiconsiderada a taxa de transferência de dados dos sen-sores Mica Motes que é de 38,4 kbps e o tamanho dopacote de dados que teria que ser transmitido. Paraeste experimento foi definido um tamanho de pacotede 40 Bytes o que significa que o tempo de transmissãoe ou recepção de um pacote de dados tem duração deaproximadamente 8 ms.
Table 1 – Parâmetros do Nó Sensor
Subsistema Especificação
Computacional Modo Ativo = 8 mA
Comunicação Tx = 27 mA, Rx = 10 mA
Fonte de Energia C=2.459.100 mA-ms, Voc=1.5V, Vco=0.8V
Foi utilizado um perfil de descarga composto porum conjunto de 5 operações realizadas por um nó sen-sor. Foram utilizadas apenas três operações (i.e., Trans-missão (TX), Standby e Recepção (RX)) na seguinte se-quência: Standby, TX, Standby, Rx e Standby. Os tem-pos, medidos em mAms, de execução de cada operaçãoe suas respectivas correntes, medida em mA, são lis-tadas, respectivamente, nos vetores Pt e Pi listados aseguir:
Pt =[
2 8 2 8 2]T
,
Pi =[
8 27 8 10 8]T
.
3Entende-se por operações básicas a transmissão e recepção de da-dos e também os momentos em que o nó sensor está em modo deespera (i.e., standby)
Proceedings of the 9th Brazilian Conference on Dynamics Control and their Applications Serra Negra, SP - ISSN 2178-3667 998
4.2. Implementação dos Modelos Linear e deRakhmatov-Vrudhula
O modelo analítico mais simples, e também um dosmais utilizados nas simulações de tempo de vida deuma bateria, é omodelo linear. Neste modelo a bateria étratada como um recipiente linear de corrente. Assim,a equação
C = Ci − Itd
permite calcular a capacidade restante C de uma bate-ria, onde Ci é capacidade no início da operação, I é acorrente constante de descarga durante a operação, e tdé o tempo de duração da operação. A capacidade re-manescente é calculada sempre que a taxa de descargamudar.
Já omodelo analítico de Rakhmatov-Vrudhula [8] foioriginalmente desenvolvido para o cálculo do tempode vida de uma bateria de íon(s) de lítio alimentadapor carga constante ou variável. Para estimar o tempode vida da bateria somente dois parâmetros especí-ficos são necessários, conforme podemos verificar naequação 18. O parâmetro α que está relacionado acapacidade da bateria e o parâmetro β que está rela-cionado ao comportamento não-linear da bateria du-rante os períodos de carga e descarga. Neste trabalho,adotou-se α = 2.459.100 e β = 4.034, estes parâmet-ros foram estimados com base nos dados de uma ba-teria alcalina [13] freqüentemente utilizada na alimen-tação dos nós sensores de uma RSSF. A estimação dosparâmetros α e β seguem a mesma metodologia ado-tada por Rakhmatov-Vrudhula [12].
A equação 18 descreve o impacto do perfil dedescarga no tempo de vida da bateria. Onde Ik−1 é acorrente de descarga durante o período k − 1. A funçãoA calcula o impacto do comportamento não linear nadescarga da bateria, onde L é o tempo de vida da ba-teria, tk é o tempo de duração do período k, e tk−1 é otempo de duração para o período k − 1. Mais detalhessobre a função A e sobre o algoritmo para calcular Lpodem ser obtidos em [12].
Ambos modelos, modelo de Rakhmatov-Vrudhula emodelo linear, foram implementados a partir da uti-lização da ferramenta matemáticaMatlab. Ametodolo-gia adotada foi simular a descarga da bateria utilizandoo mesmo perfil de descarga em ambas implementações,comparando o resultado final da capacidade da bateriaapós um tempo de simulação de 60 segundos.
Na Figura 4 é apresentada a capacidade residualde uma bateria alcalina após a simulação de descargado perfil Pi após 60 segundos de simulação utilizandoo modelo de Rakhmatov-Vrudhula. Verifica-se que ovalor da capacidade residual é de 2.451.460,39 mAms,resultando em um ∆C = 7.639,61 mA o que corre-sponde a uma redução de 0,32% na capacidade da ba-teria.
Já na Figura 5 é apresentada a capacidade residualda bateria considerando a utilização do modelo linearde descarga. Nesta simulação verifica-se que a capaci-
0 10 20 30 40 50 60 702.451
2.452
2.453
2.454
2.455
2.456
2.457
2.458
2.459
2.46x 106
Tempo(s)
Cap
acid
ade
da B
ater
ia −
mA
−ms
2.451.460,39 mA
C = 7.639,61 mA
Figure 4 – Capacidade remanescente da bateria utilizandoo modelo de Rakhmatov-Vrudhula.
dade residual da bateria é de 1.517.916mAms apresen-tando um ∆C = 941.184 mA, o que corresponde a umaredução de 38,27% na capacidade da bateria.
0 10 20 30 40 50 60 701.5
1.6
1.7
1.8
1.9
2
2.1
2.2
2.3
2.4
2.5x 106
Tempo
Cap
acid
ade
da B
ater
ia −
mA
−ms
C = 941.184 mA
1.517.916 mA
Figure 5 – Capacidade remanescente da bateria utilizandoo modelo linear.
A grande variação na capacidade remanescente dabateria apresentado pelo modelo linear em compara-ção ao modelo de Rakhmatov-Vrudhula ocorre devidoao modelo linear não levar em consideração os efeitosnão-lineares na descarga da bateria (i.e., efeito de taxade capacidade e efeito de recuperação) que foram de-talhados na Seção 2.
A partir destes resultados pode-se verificar o quantoa adoção de um modelo não acurado, como é o casodo modelo linear, pode ocasionar interpretações equiv-ocadas relacionadas com a capacidade remanescentede uma determinada bateria, uma vez que verificou-seque o modelo linear apresentou um consumo 123 vezesmaior quando comparado ao modelo de Rakhmatov-Vrudhula para um mesmo perfil de descarga.
Proceedings of the 9th Brazilian Conference on Dynamics Control and their Applications Serra Negra, SP - ISSN 2178-3667 999
5. CONCLUSÕES
Neste trabalho foram apresentadas a modelagem esimulação do consumo de energia de um nó sensor dotipo Mica Motes alimentado por uma bateria do tipoalcalina.
Como estudo de caso foram comparados os resul-tados obtidos no cálculo da capacidade da bateria deum nó sensor através de dois modelos analíticos de ba-teria, o modelo linear e um modelo mais acurado de-nominado modelo de Rakhmatov-Vrudhula que dentreoutras características considera os efeitos não-linearesdurante o processo de descarga de uma bateria.
Os resultados obtidos têm mostrado que o modeloanalítico de Rakhmatov-Vrudhula apresenta resultadosmais adequados para a estimação do tempo de vidade um nó sensor, pois consegue capturar o comporta-mento não-linear de uma bateria e a recuperação desua capacidade durante períodos de alternância de cor-rentes do nó sensor. Enquanto que o modelo linear,por ser bastante simples, não consegue capturar taisefeitos.
Como trabalhos futuros, pretende-se estender opresente trabalho adicionando experimentos reais dedescarga da bateria comparando os resultados com osobtidos a partir das simulações realizadas neste tra-balho.
AGRADECIMENTOS
Os autores agradecem o apoio financeiro da Fun-dação de Amparo a Pesquisa do Estado do Rio Grandedo Sul (FAPERGS) referente ao Edital 03/2009 (ARD) eda CAPES - Coordenação de Aperfeiçoamento de Pes-soal de Nível Superior - Brazil.
REFERENCES
[1] M.R. Jongerden and B.R.H.M., “Which batterymodel to use?” Proceedings of the 24th UK Per-formance Engineering Workshop, pp 76-88, Lon-don, July 2008.
[2] M.R. Jongerden and B.R.H.MHaverkort, ”BatteryModeling”, Thecnical Report in Faculty Electri-cal Engineering, Mathematics and Computer Sci-ence, 2008.
[3] K. Lahiri, A. Raghunathan, S. Dey and D. Pan-igrahi. ”Battery-Driven System Design: A NewFrontier in Low Power Design”, Dept. of ECE, UCSan Diego, La Jolla, Research Labs, NEC USA,Princeton, NJ.
[4] N.R. Daler and B.K.V. Sarma, ”An AnalyticalHigh-Level Battery Model for Use in EnergyManagement of Portable Electronic Systems”,This work was carried out at the National Sci-ence Foundation’s State/Industry/University Co-operative Research Centers’ (NSFS/IUCRC) Cen-ter for Low Power Electronics (CLPE), CLPE is
supported by the NSF (Grant EEC-9523338), theState of Arizona, and a consortium of compa-nies from the microelectronics industry (visit theCLPE web site http://clpe.ece.arizona.edu).
[5] D. Panigrahi, C. Chiasserini, S. Dey, R. Rao, A.Raghunathan and K. Lahiri, ”Battery Life Esti-mation of Mobile Embedded Systems”, This workwas supported by NEC USA Inc., and by the Cal-ifornia Micro Program
[6] M. Chen, Student Member, IEEE, and G.A.Rincón-Mora, Senior Member, IEEE, ”AccurateElectrical Battery Model Capable of PredictingRuntime and I-V Performance”, IEEE Transac-tions on Energy Cconversion, Vol. 21, NO. 2,JUNE 2006.
[7] P. Sausen, ”Gerenciamento Integrado de Energiae Controle de Topologia em Redes de SensoresSem Fio”, Tese de Doutorado, Universidade Fed-eral de Campina Grande - Campus de CampinaGrande, Paraíba, Brasil, julho de 2008.
[8] D. Rakhmatov and S. Vrudhula, ”Energy Man-agement for Battery-Powered Embedded Sys-tems”, ACMTransactions on Embedded Comput-ing Systems, Vol. 2, Nº 3, pp. 277-324, August2003.
[9] T. L. Martin, ”Balancing batteries, power, andperformance: System issues in cpu speed-setting for mobile computing”, Ph.D. disserta-tion, Carnegie Mellon Unerversity, 1999.
[11] CROSSBOW, "Crossbow technology inc. datasheet:," http://www.xbow.com, 2010.
[12] D. Rakhmatov and S. Vrudhula, "An AnalyticalHigh-Level Battery Model for Use in Manage-ment of Portable Electronic Systems", Proceed-ings of ICCAD, p. 1 - 6, 2001.
[13] Panasonic, "Panasonic industrialalkaline batteries data sheet:,"http://www.panasonic.com/industrial/battery,2010.
Proceedings of the 9th Brazilian Conference on Dynamics Control and their Applications Serra Negra, SP - ISSN 2178-3667 1000