56
0 G AsTi c .../ a. xis APOLLO 0 ../ 17 GUIDANCE Ar‘ AND -.I Z 0 V 2 NAVIGATION & 0 SYSTEM MI SD JULY I. 4943 1. + L
0 GAsTic
.../ a. xis APOLLO
0 ../ 17 GUIDANCE
Ar‘ AND -.I Z 0 V 2 NAVIGATION
& 0 SYSTEM
MI SD JULY I. 4943 1.
+
L


NORTH AMERICAN AVIATION, INC. SPACE AND INFORMATION SYSTEMS DIVISION
11-4 AP 74372A
11501
ALT (FT) ASCENT TRAJECTORY
S-IVB IGNITION t -.542 SEC V--= 20,900 FPS
S-I1 IGNITION V.7600 FPS
1500 500 1000
RANGE (N MI)
SATURN V
S-IVB DOUGLAS
;a( 4 le,- 1 J -2 ENGINE
ROCKETDYNE kea,..7104)
7 5 3
scr am
S-ii SAID
S-IC BOEING
5 J -2 ENGINES ROCKETDYNE
P1F,
360 FT
LES JETTISON V.7800 FPS
ORBIT ACQUISITION t 2-- 706 SEC z
5 I V-24,280 FPS C
7ee -
600,000
!!! 1111
1111111111 11111h
NITIIII
A A A
300,000
200,000
0 L
SATURN V

ASCENT PHASE
GN-211 (*)
EARTH ORBIT POSITION & TRAJECTORY DETERMINATION
GN-180 + )

MIDCOURSE POSITION & TRAJECTORY DETERMINATION
NEW COMPUTED TRAJECTORY
GN-182 (;)
START DEBOOST
rti c 4_1; 4:4 r c /(,) A 42c;
- ic e
GN-206A (*)
LUNAR ORBIT INJECTION

r rA4 e 5
/ inselp.
HOHMANN TRANSFER ORBIT
80 N MI CIRCULAR ORBIT
CSM
I-7 I I FINAL 1-0--INERTIAL PHASE TOUCHDOWN
-Z500 SEC PHASE III
CSM V • 5285 FPS LEM INJECTION AV • 98 FPS
HOHMANN DESCENT ORBIT
N10 N MI LANDING SITE
POWERED DESCENT TRAJECTORY
CONSTANT LINE OF SIGHT PHASE II
GN-241
200 N MI
LUNAR ORBIT & LEM DESCENT 1245010439
LEM DESCENT TRAJECTORY

LUNAR ORBIT ASCENT TRANSFER ORBIT
RENDEZVOUS
CSM AT LEM INJECTION
TERMINAL REND
LEM ASCENT & LUNAR ORBITAL RENDEZVOUS
FAM-1006 (M)
64AP76945
LAUNCH AIM POINT DETERMINATION

ENTRY POINT
-INCLINATION
S/M RCS FUNCTIONS
-X TRANSLATION
5.5 SEC. + ROLL
AFTER 2 SEC
C/M ENTRY ATTITUDE
RETURN GEOMETRY
GN-204()
S/M JETTISON
SEQ-59B610)

ENTRY BOUNDARIES ENTRY POINTS
NOMINAL TRAJECTORY
PERIGEE OF OVERSHOOT TRAJECTORY
ATM OS PHERE INTERFACE
ATMOSPHERE
400, 000 FT
VACUUM TRAJECTORY
LAND IN SITE
CX• -6.1° CM/ SM
SEPARATION
CONSTA T
1500 NM
GN-197B-1( )
VACUUM TRAJECTORY
GN-205 A LIP))
ENTRY PROFILE T

GN-9008
STEERING SIGNALS
DISCRETES ENG NES
"ON" a "OFF"
ENTRY PROFILE = -7.1°
OPTICAL NAVIGATION
INERTIAL GUIDANCE
GN-197B-24)j
OPTICAL r - -C
SIGHTINGS OPTICAL INSTRUMENTS
SPACECRAFT CONTROL
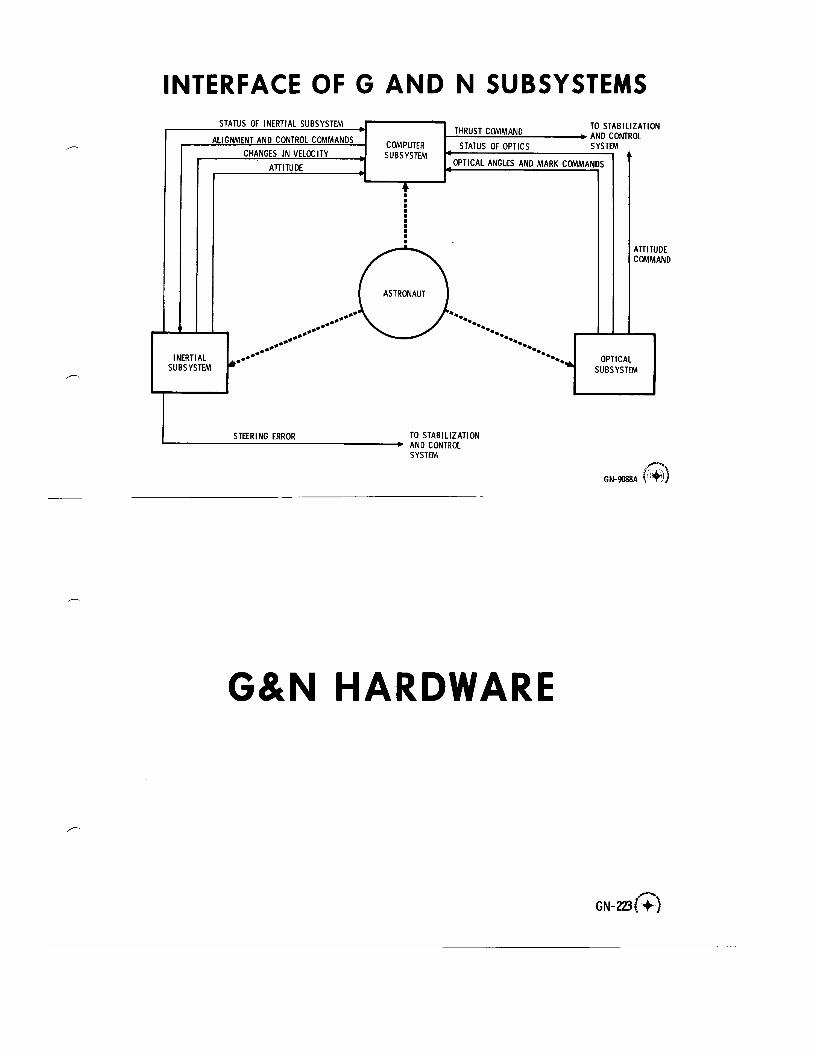
INTERFACE OF G AND N SUBSYSTEMS
•
STATUS OF INERTIAL SUBSYSTEM
ALIGNMENT AND CONTROL COMMANDS
CHANGES IN VELOCITY
ATTITUDE
COMPUTER SUBSYSTEM
TO STABILIZATION ► AND CONTROL
STATUS OF OPTICS
SYSTEM •
OPTICAL ANGLES AND MARK COMMANDS •
THRUST COMMAND
ATTITUDE COMMAND
INERTIAL SUBSYSTEM
OPTICAL SUBSYSTEM
TO STABILIZATION AND CONTROL SYSTEM
STEERING ERROR
2% GN-9088A
G&N HARDWARE
GN-223( +)

G & N SYSTEM
NVB
GN-190

IMU

GN-192 re)
OPTICS-INERTIAL ASSEMBLY
PSA

REMOVABLE CORE ROPE MODULES
POWER CONNECTOR 05A5P5
(LOGIC) - TRAY A
(MEMORY) - TRAY B COLD PLATE
TEST CONNECTOR 05A5P3
OUTSIDE WORLD CONNECTOR 05A5P4
N GN-229A(*)
BLOCK I COMPUTER 100 SERIES
COVER PLATE
CDU
GN-191

MAIN DISPLAY AND CONTROL PANEL
G&N SYSTEM EQUIPMENT LOCATION
GN-9163A t.er

LOC
AT
ION
OF
GU
IDA
NC
E A
ND
NA
VIG
AT
ION
EQ
UIP
MEN
T IN
SPA
CE
CR
AFT
8
C-5
G&N CONTROL & DISPLAYS
GN-224 (+5.)

MAIN DISPLAY CONSOLE LOCATOR FAM-6001- FAM-6012 FAM-6010
FAM-6011
FAM-6016
-FAM-6005
FAM-6007
FAM-6009
COMP FAIL
CHECK FAIL BLOCK
ACCEPT
r
UP TEL
ACTIVITY
UPTL : :COMP:
VERB
PROGRAM
► 3 I a
REGISTER I
REGISTER 2
REGISTER 3
1 + 4-1590
CLEAR VERB NOUN ENTER
7 8 9
4 5 6
0 2 3
NOUN
KEY RISE
ERROR RESET
+29 1-162 -1 00 76
19
GN-207A (*) G & N COMPUTER CONTROL

CDU FAIL IMU FAIL IMU TEMP CAUT/WARN FAIL
GEM ACCEL FAIL
G&N ERROR GMBL LOCK AGAP TEMP
C/M RCS A
C/M RCS B
AGC PWR FAIL
CO2 PP HI
S/M RCS A
S/M RCS B
S/M RCS C
S/M RCS D
A A&C ROLL CHAN
A MD ROLL CHAN
A PITCH CHAN
A YAW CHAN
B A&C ROLL CHAN
B MD ROLL CHAN
13 PITCH CHAN
B YAW CHAN ,
FAM-6210 (*)
• AUCI CM I RAI CUT, LAU GILL
CY.:= "tIP CON' T I•05 Ca:Or "12/11 ' C a' 1 NNW CII1151 54,02
0 000 0 000 o' 000
ROA StO I C"""
'AAA • A.. ILA OA AC AA Ac
0 0000 000 000 (551/IC NON B55 laTC
vxwa
IF - I- NA -0/ I -WY AABIL2 N511.11
• ADC ALTUS UAC .135.2 MI A sAr VA7 A eA7 MT A LAT CP,. CH. A. A AC MI IAA I A IAN II IA A AIN AC P AC7
0000 000 000 0 0000 000 00 0 • TBLICOMMUNICAIION5
MN • I al 5 ;CIA1. :=".•
00000000 00 0 0 000 0 0 5NVIRCIABIANTAL CON•01 MUM
CANN AN PANS ..--.2.—. GLATCOB NM'S INITUMENT5
AC •44 SC I •12 A— TII• TTT Noe. ess PAM RAVI GM ANAL
MO 0, OA • P OC AN A III. ANA MN. TTIT ••• T. •ITTT xCi
09000000000000 000 • TATII COW/1550Z a BADTATOA
NAM MT Ram uur
M • BC M • NC • PG I • AC MI • UN • IAN • 0.0 MN PAN AMY • AN kW • AM B
0000 000 00000 00000 • 00
STO COW --• ••••■ atm.. A AIM I A LOGIC MT 11,105 INT A MI B
rAM-61221 )

NAV-BASE INDEX + POLARITY RATE - - ATTITUDE ERROR+
BODY AXIS INDEX PITCH ANGULAR VELOCITY
0 ROLL ATTITUDE MARKER
PITCH ATTITUDE ERROR
+ POLARITY RATE - - ATTITUDE ERROR+
YAW ANGULAR VELOCITY YAW ATTITUDE ERROR
e-
A&C ROLL M 0 N
• T 0
ENTRY
SCS CONTROL PANEL
NORMAL
BMAG
OFF
MIN
GAN
DIRECT MODE
MAX .1.)
ATTITUDE
OFF
.4
FLIGHT DIRECTOR ATTITUDE INDICATOR
NOTES, 1. ATTITUDE ERROR = ATTITUDE DESIRED - ACTUAL ATTITUDE. 2. THE BALL IS OF THE INSIDE-OUT CONVENTION. 3. EULER ANGLE CONVENTION IS PITCH, YAW, ROLL 4. THE BALL ATTITUDE SHOWN IS PITCH 345° , YAW 335° , AND
ROLL 300° , WITH RESPECT TO THE NAVIGATION BASE INDEX. SCS- 100B
SCS-106B

LOWER EQUIPMENT BAY PERSPECTIVE

G&N OPTICS CONTROL PANEL 100 SERIES
G&N INTERFACE SYSTEMS COMMUNICATIONS & INSTRUMENTATION SYSTEM
/ler / /OPTICAL I /
LINE-OF-SIGHT
STEERING ERROR & THRUST COMMANDS COOLANT
FLUID ENVIRONMENTAL CONTROL SYSTEM STABILIZATION
& CONTROL SYSTEM PRIMARY
POWER
CHECK COOLANT
MARK
ENABLE
off *
CONDITION LAMPS
*cff 8
SPEICS
0
O
O
O
0
0
•
DOCK HECK MODE CONDITION
LAMPS 0LAMPS
CALL HP CODE NUMBERS
GN-500A
ATTITUDE CONTROL SIGNAL
ATTITUDE
I 1—
ELECTRICAL POWER SYSTEM
REACTION THRUSTCONTROL
CONTROL VEHICLE i SIGNAL DYNAMICS i REACTION JET SYSTEM
i SERVICE P ROPU LS ION
MAIN PROPULSION ENGINE SYSTEM
SPACECRAFT CONTROL LOOP

IMU MOUNTING PADS 141 NAV. BASE
IMU LOCATING PINS
NAV. BASE ISOLATION MOUNTS 131
STUD HOLES FOR MOUNTING BELLOWS
OPTICAL SYSTEM MOUNTS (3)
SPACE SEXTANT
SCANNING TELESCOPE
BALL MOUNT
OPTICAL BASE
COOLANT SYSTEM CONNECTIONS
TELESCOPE PANEL
SEXTANT PANEL
OPTICS SUBSYSTEM
GN-220(+- )
OPTICAL SUBSYSTEM AND NAV. BASE
GN-9120A +

FIELD 60 DEG MAGNIFICATION 1X
SEXTANT SCANNING TELESCOPE
LINE OF SIGHT 1 LINE OF SIGHT 2 LINE OF SIGHT TRUNNION DRIVE
1.1
ZERO OPTICS SHAFT AXES AND TRUNNION AXES COINCIDENT WITH NAV. BASE AXES
OPTICAL SCHEMATIC
GN-176 A (*)
OPTICAL SYSTEM AXES
GN-9175A

GN-9121A
SCANNING TELESCOPE OPTICAL SCHEMATIC
EYEPIECE
FOCAL PLANE
DOUBLE-DOVE PRISM
RETICLE
FOCAL PLANE
PECHAN PRISM
EYEPIECE WINDOW
EYEPIECE PRISM ASSY
GN-9122 A
SCANNING TELESCOPE CUTAWAY
1. WINDOW 2.
ELECTRICAL CONNECTOR
3. RELAY LENS ASSEMBLY 4. OPTICAL BASE 5. PECHAN PRISM 6. BALL MOUNT 7. TRUNNION DRIVE WORMSHAFT 8. PRISM & MOUNT ASSEMBLY 9. CAM
10. SPRING & CAMFOLLOWER (ANTI BACKLASH) 11. OBJECTIVE LENS ASSEMBLY 12. RETICLE 13. RETICLE ILLUMINATION 14.
STUD HOLES FOR BELLOWS COVER
15. SHAFT DRIVE GEAR BOX 16. HEAT EXCHANGER CHANNELS 17. COUNTER (SHAFT AXIS) 18. EYEPIECE ASSEMBLY

MX RESOLVER STATOR 64 X RESOLVER ROTOR
BEAMSPLMER
1X RESOLVER STATOR
1X RESOLVER ROTOR
TRUNNION AXIS BALL BEARING 121
TRUNNION DRIVE GEAR
MIRROR
TRUNNION DRIVE MOTOR MIRROR MOUNT
SEXTANT CUTAWAY 1. OPTICAL BASE 2. COOLANT CONNECTIONS 3. BALL MOUNT 4. STUD HOLES FOR MOUNTING BELLOWS
COVER 5. FIXED RIGHT-ANGLE MIRRORS 6.
TRUNNION AXIS RESOLVER (64XI
7. COVER-FASTENING ROD 8. INDEXING MI RROR 9. BEAM SPLITTER
10. TRUNNION DRIVE GEAR BOX 11. OBJECTIVE LENS ASSEMBLY
13 12. INTERMEDIATE LENS ASSEMBLY
3 13. SHAFT AXIS DRIVE MOTOR 14. RETICLE 15. LIGHT-TRANSMITTING ROD 16. RETICLE LAMP 17. SHAFT-AXIS RESOLVER (16X)
15 18. SHAFT DRIVE GEAR BOX 19. EYEPIECE SOCKET & SEAL 20. EYEPIECE OBJECTIVE LENS 21. EYEPIECE MIRRORS 22. EYEPIECE OCULAR
GN-9124 A
SEXTANT TRUNNION AXIS ASSEMBLY
GN-9125A (+7.)

114 SPEED RESOLVE
I SPEED RESOLVER
SLEW SWITCH
1/2 SPEED RESOLVER
DISPLAY DIALS
SEXTANT OPTICAL SCHEMATIC
REFLECTING MIRRORS
INDEXING MIRROR
BEAM-SPLITTER
OBJECTIVE LENS ASSEMBLY
INTERMEDIATE LENSES
-RETICLE FOCAL PLANE
0 WINDOW
J EYEPIECE OBJECTIVE
EYEPIECE OCULAR
GN-9126A
COUPLING DISPLAY UNIT

MANUAL DRIVE
CDU BLOCK DIAGRAM
GN-9130
OPTICS MECHANIZATION BLOCK I 100SERIES
TRUNN I ON A° 1. TO CDU AGC
AGC DAC
POSI TI ON LOOP
SXT TRUNNION INTEGRATING
LOOP
•
110. INTEGRATING
LOOP STAR PRESENCE
TO AGC
STAR TRKR & OPTICS
SCT TRUNNION REPEATER OPTICS
CONTROLLER HORIZON SENSOR & OPTICS AS AUTO
MARK
AGC DAC
SXT SHAFT INTEGRATING
LOOP
POSITION LOOP
_101 SCT SHAFT I
REPEATER
SHAFT I AO
CDU TO AGC
GN-731 (E

AGC
OPTICAL INTEGRATING AND RESOLUTION CIRCUIT
CDU'S GN-9146A (*)
IMU
1111 DISPLAY AND CONTROL PANEL
CDUS AND ELECTRONICS
-71
6
4,
OPTICAL CONTROL LOOP
STABILIZATION AND CONTROL SYSTEM
ijillirada4 Mil •1111=in.._ gritirtaililiiiiihrk.
arm AMMO 111%Iii ..wmaistiimmwalswAmplit-Latul MITPw.iiMMIIIIIIIIMPT AiRcIll .1rIsior Mlle Ww.IIIA■reGilim
II= 16111W-12 11111Era 'El ASS MEM =WIC mainatir rrvgi Immommui4 immarirm ,a , sumimmtillo A raby 4111111 Bra .ai Tairamatfr
■I um- 1111M■■■■■11 - EIN___Anippoll
G N -198 (;)
OPTICAL MEASUREMENT
LAND MARKS

IMU ALIGNMENT MEASUREMENT Xsm
STABLE MEMBER COORDINATES
GN-9100A( 4- )
ORBITAL NAVIGATION MEASUREMENT X SC
GN-9102A (+))

IMPROVED ESTIMATE OF POSITION
EARTH ORBIT NAVIGATION
MIDCOURSE POSITION DETERMINATION STAR
GN- 183A

MIDCOURSE NAVIGATIONAL MEASUREMENT
LANDMARK
to,
FIXED MIRRORS
SEXTANT FIELD OF VIEW
TELESCOPE FIELD OF VIEW
GN-9103A ()
TRACKER & HORIZON SENSOR LOCATION
GN-212 l ♦ '1

S. L. O. S.
PHOTO TUBE
TRACKER LINE OF SIGHT
PHOTO TUBE
OBJECTIVE FOCAL COLLECTOR LENS PLANE LENS
HORIZON SENSOR F. L. O. S.
OBJECTIVE FOCAL COLLECTOR LENS PLANE LENS
.,.- GN-214 (4)0 )
TRACKER OPTICAL SYSTEM
I SEXTANT HEAD I INDEX MIRROR
TRUNNION (SIDE TAB)
AXIS PICK UP FORK COIL A (COLLECTOR ) (2)
APERTURE
FORK
TO PHOTO MULTIPLIER
RIGHT ANGLE MIRRORS
HOUSING AND LENS ASSEMBLY
A-POS LENS B-NEG LENS (OBJECTIVE)
STAR TRACKER MIRROR
B
TUNING FORK RESONATOR ASSEMBLY
G N- 230 'I.(*)

FORK B PICKUP COIL
FORK B DRIVE COIL
0 4
FORK A PICKUP COIL
TINE OF TUNING FORK A
APERTURE SLOT, FORK B
TINE OF TUNING FORK B
SECOND HARMONIC
TRACKER SCANNING MECHANISM
GN-213A(,
STAR SIGNAL WAVEFORMS ••■■•••
■0"
El;
• •
001 4
FORK DRIVE SIGNAL (MOTION)
LIGHT TO PH OTOTU BE
SIGNAL CONTENT
TIME
FUNDAMENTAL
0° 9o° 180° 270°
' ■
gi)
,./
o0
01- 11. ■1111:1■ POMPACEMIE
FUNDAMENTAL AND SECOND HARMONIC
GN-217 (40)

VARI HIGH VOLTAGE PIS & STAR PRESENC E
DETECTOR
100 KC STAR PRESENCE
CONTROL AMP
X AXIS FORK DRIVE AMP
455 CPS
Y AXIS FORK DRIVE AMP 356 CPS
GN-210A (0)
NBA 910 CPS
NBA 712 CPS
►-0 455 CPS
NBA
NBA 356 CPS
LELECTRONICS ASSY
STAR -PRESENCE
OUTPUT
■11.
AGC & STAR P--4P PRESENCE
SIGNAL
TRKR DEMOD H X
OUTPUT
TRKR DEMOD -4P Y
OUTPUT
TUNING FORKS & APERTURE
OBJECTIVE COLLECTOR LENS. LENS
OTOMULT I PL I ER TUBE
PRE AMP
DET
DET
DET
SXT HEAD
L
ELECTRONICS STAR TRKR Y AXIS-111.
STAR PRESENCE
STAR TRACKER
STAR TRACKER MECHANIZATION

HOR ZON GATE
AGC
_41 NARROWH PEAK BAND AM
550 CPS DETECTOR
•
GN-209A ira,-‘ §AP2)/
SOURCE
TUNING FORK/'-' & APERTURE
FIXED HIGH VOLTAGE POWER
SUPPLY
[FORKAMP DRIVE
550 CPS
PREAMP COMPARATOR
1/2 RECTIFIED SIGNAL I (PEAK VALUE IS STORED) 1
NEGATIVE RECTIFIED SIGNAL
RECTIFIED DETECTOR OUTPUTS
SUM OF DETECTOR OUTPUTS
+ VOLTS
0
- VOLTS
+ VOLTS
0
- VOLTS
HORIZON SENSOR
OBJECTIVE COLLECTOR PHOTOMULTIPLIER LENS LENS TUBE
HORIZON SENSOR WAVEFORMS
HOR IZON SIGNAL
ALTITUDE
GN-218 rH

I RIG
PIP
ADA
I GA
INERTIAL SUBSYSTEM
GN-221( +))
APOLLO STABLE MEMBER CONFIGURATION
GN- 9007A ( )

OUTER GIMBAL AXIS (OGA)
SUPPORT GIMBAL (CASE)
OUTER GIMBAL
MIDDLE GIMBAL AXIS (MGA)
LIMIT SWITCH ±60°
STABLE MEMBER (INNER GIMBAL)
INTERGIMBAL ASSEMBLY (6)
MIDDLE GIMBAL
INNER GIMBAL AXIS (IGA)
COARSE RESOLVER GYRO ERROR RESOLVER
MIDDLE GIMBAL STABLE MEMBER
DC TORQUE MOTOR
IMU GIMBAL ASSEMBLY
GN-9155A
INTERGIMBAL ASSEMBLY
SLIP RING ASSEMBLY
BEARI NGS
GN-9038At'rj

GN-9064A INERTIAL MEASUREMENT UNIT
XaXgXsm
Za ZgZsm
Ya Ysm Yg ADArg/
STABLE MEMBER
\ ANGLE = CONE
E - 33.
xe
Zmg Ysc ADA mg Ye
SPACECRAFT
ENTRY ROLL AXIS
STAR LOS LANDMARK LOS
X SC (ROLL)
X NB
ZERO AXIS ALIGNMENT
G&N FUNCTIONAL SCHEMATIC
OGA
GN-196A f.Vt)

I NPUT AX IS
CASE
SPIN AXIS .*%**-►
SPIN GYRO WHEEL REFERENCE ASSEMBLY AXIS
OUTPUT AXIS
GN-240 ((*)
PRIMARY 2 EXCITATION
PRIMARY 2 EXCITATION
7 COUNTER-CLOCKWISE ROTATION
25 IRIG, SIMPLIFIED CUTAWAY VIEW
DUCOSYN SIGNAL GENERATOR OPERATION
GN-239

MAGNETIC C2 SUSPENSION MAGNETIC EXCITATION SUSPENSION
EXCITATION
DUCOSYN TORQUE GENERATOR OPERATION
TG+
TG
TG(COMM)
POSITIVE TORQUING SIGNALS APPLIED
GN-238 1,)
MAGNETIC SUSPENSION
GN-237 (+7)
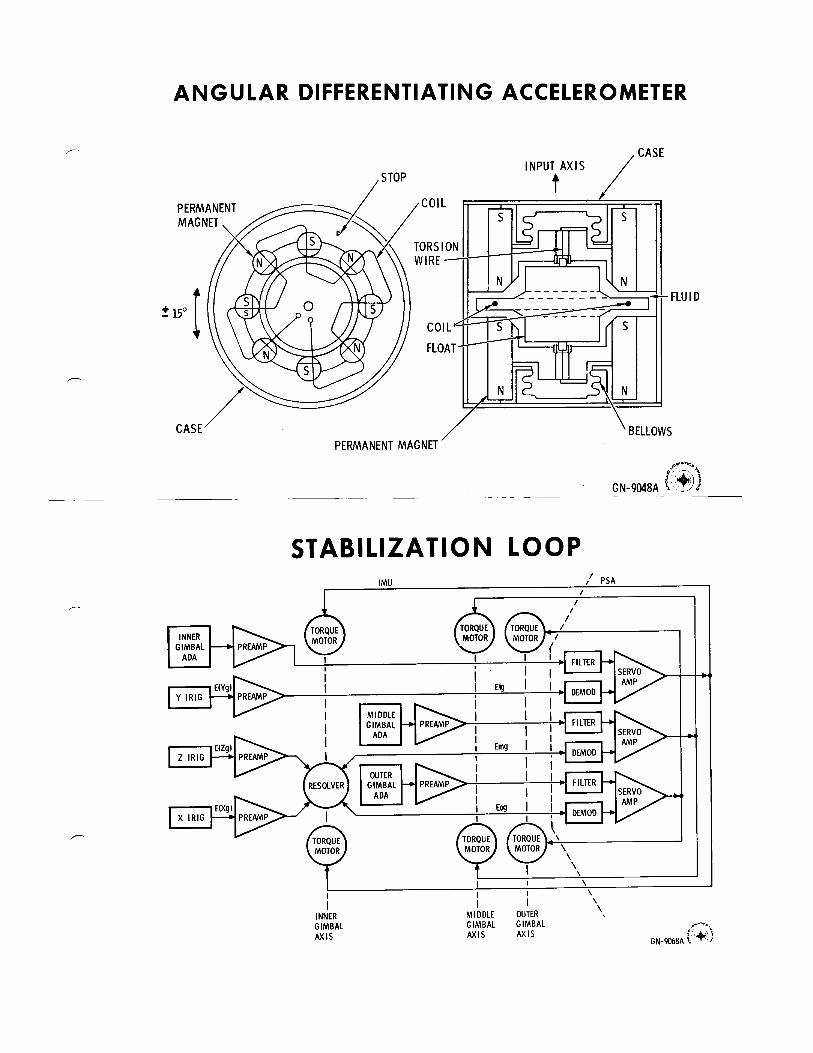
STABILIZATION LOOP IMU
ANGULAR DIFFERENTIATING ACCELEROMETER
CASE INPUT AXIS
STOP
COIL PERMANENT MAGNET
FLUID ± 15°
COIL
FLOAT
S
CASE
PERMANENT MAGNET
PSA
BELLOWS
GN-9048A *)
TORQUE MOTOR INNER
GIMBAL ADA
Y IRIG
TORQUE MOTOR
EIYg)
TORQUE MOTOR
FILTER SERVO AMP
MIDDLE GIMBAL
ADA FILTER
SERVO AMP E(Zg)
Z IRIG
OUTER GIMBAL
ADA FILTER
SERVO AMP
RESOLVER
E(X9 I X IRIG P REAM P
TORQUE MOTOR
TORQUE MOTOR
TORQUE MOTOR
INNER GIMBAL AX IS
MIDDLE GIMBAL AX IS
OUTER GIMBAL AX IS
GN-9068A .+))

MAGNETIC SUSPENSION
CENTER OF MASS OF FLOAT LOCATED AT POINT OF EQUIVALENT PENDULOUS MASS
PRA PENDULOS I TY PAA REFERENCE AXIS PENDULOUS ARM AXIS
GN-179
FLOATED PENDULUM UNIT
ACCELEROMETER LOOP
SWITCHING PULSE FROM APOLLO
INTERROGATOR PULSE GUIDANCE COMPUTER
L DATA PULSE
+T SET BINARY CURRENT
-T SET SWITCH
+ TORQUE
IMU POWER SERVO ASSEMBLY
PRE AMP
AC DIFF AMP
• INTERROGATOR
SG 16 PIP
L +TORQUE
TG 4
• -TORQUE CALIBRATION
MODULE
DC AMP AND PRECISION
VOLTAGE REFERENCE
- TORQUE
NEGATIVE VELOCITY PULSE
POSITIVE IVELOCITY PULSE
+AV •
FORWARD TO APOLLO BACKWARD GUIDANCE COUNTER -AV COMPUTER
GN-9039A

G N-9033
WATER-GLYCOL COOLANT PASSAGE
BACKUP
NOX AUTO ALARM OVERRIDE
-(PROPORTIONAL)
( EMERGENCY ) ►
( ALARM )
HEATER CURRENT
AMP
EMERG HEATER
CONTROL
TEMP CONTROL SENSORS
NORMAL
TEMP CONTROL
AMP
EMERGENCY
--10 CONTROL HEATERS
L 0
E R
TEMP INDICATOR
TEMP ALARM & BACKUP
AMP
REGULATED FIXED +28 VDC ACCEL
POWER SUPPLY HEATERS
EMERG HEATERS
FORCED CONVECTION IN IMU
IMU TEMPERATURE CONTROL
GN-219

STAB LOOP
COARSE ALIGN AMPLIFIER
xcatra
AGC
STABILIZATION LOOP ELECTRONICS
CDU AND ELECTRONICS
IMU
COARSE ALIGN LOOP
GN-9099A +1)
STAB I L I ZATI ON LOOP
ELECTRONICS
FINE ALIGNMENT TORQUING
ELECTRONICS
STAB LOOP a
GN-9104
COARSE ALIGN
FINE ALIGN
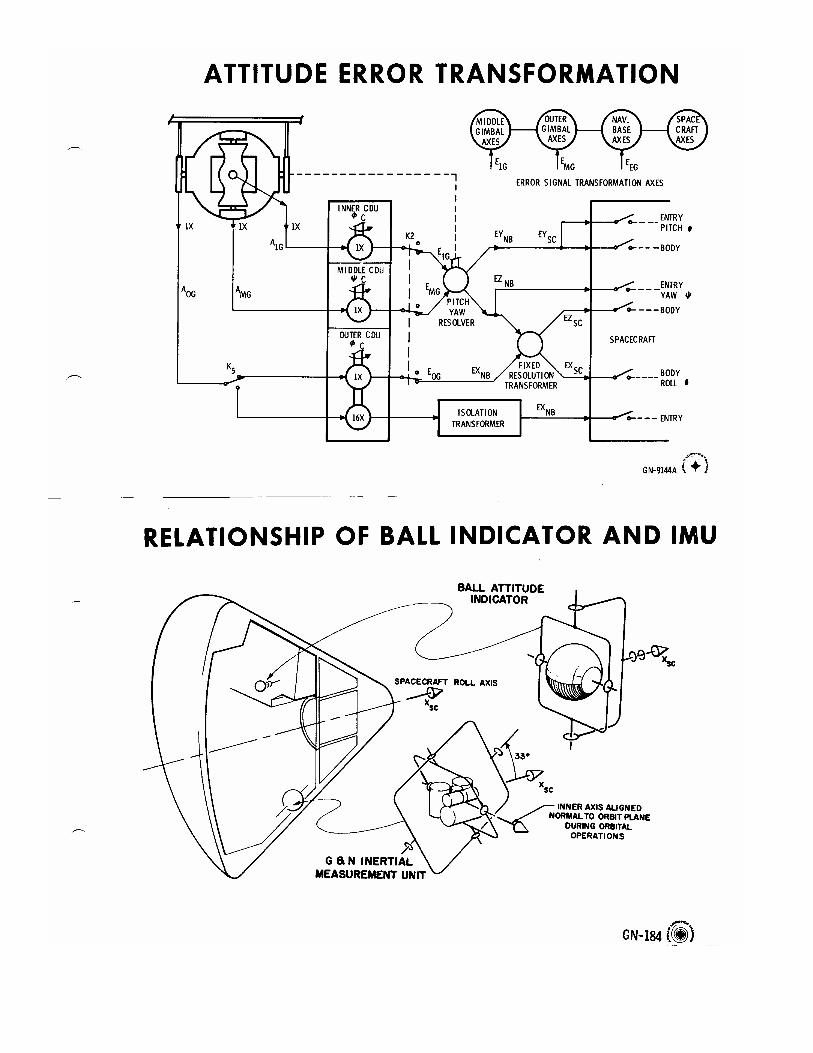
ATTITUDE ERROR TRANSFORMATION
1G EMG EG
ERROR SIGNAL TRANSFORMATION AXES 1
INNER CDU C
a MIDDLE CDU
C
1(2 0
IG
MG
• PITCH YAW
RESOLVER
EYNB
EY SC
EZ NB
ENTRY PITCH •
v*<- -- -BODY
7,--" ENTRY YAW 9(
---BODY
• • ix
• 1
AOG
Z SC
SPACECRAFT
FIXED EX
E OG EX N RESOLUTION TRANSFORMER
____ BODY ROLL •
ISOLATION TRANSFORMER
EX NB --- ENTRY
GN-9144A
RELATIONSHIP OF BALL INDICATOR AND IMU
BALL ATTITUDE INDICATOR
oe-EP:cs, SPACECRAFT ROLL AXIS
SC
INNER AXIS ALIGNED .......1<-...- NORMALTO ORBIT PLANE
DURING ORBITAL OPERATIONS
G a N INERTIAL MEASUREMENT UNIT
GN-184 (*)

BODY AXIS INDEX PITCH ANGULAR VELOCITY
ROLL ATTITUDE MARKER
NAV-BASE INDEX
PITCH ATTITUDE ERROR
POLARITY RATE -- ATTITUDE ERROR+
YAW ANGULAR VELOCITY YAW ATTITUDE ERROR
•1
LOWER DISPLAY AND CONTROL PANEL
10"41
MAIN DISPLAY AND CONTROL PANEL
G AND N SYNC SWITCH
STABILIZATION AND CONTROL SYSTEM
MANUAL CDU Io• MODE FINE ALIGN
MODE
FLIGHT DIRECTOR ATTITUDE INDICATOR
NOTES: 1. ATTITUDE ERROR ATTITUDE DESIRED - ACTUAL ATTITUDE. 2. THE BALL IS •OF THE INSIDE-OUT CONVENTION. 3. EULER ANGLE CONVENTION IS PITCH, YAW, ROLL 4. THE BALL ATTITUDE SHOWN IS PITCH 345° , YAW 335° , AND
ROLL 300° , WITH RESPECT TO THE NAVIGATION BASE INDEX. SCS-100B
GN-9150A k(,75i

STABILIZATION LOOP ELECTRONICS
16 IS
IMU
AGC
E ENGINE ON AND OFF DISCRETE
(LOWER DISPLAY AND ► CONTROL PANEL l
GN-9I49A t.V.,7))
RESOLVER NETWORK
(VELOCITY STEERING L00. 1) STABILIZATION AND
CONTROL SYSTEM 4-
SERVICE PROPULSION
SYSTEM
SPACECRAFT THRUST VECTOR CONTROL VSC
PSA FAMILY TREE POWER SERVO
ASSEMBLY
TRAY I GIMBAL SERVO
ELECTRONICS
TRAY 2 POWER
SUPPLY ELECTRONI CS
TRAY 3 GYRO
ACCEL ELECTRONICS
TRAY 4 GYRO
ACCEL ELECTRONICS
TRAY 5 CDU & GYRO
ACCEL ELECTRONICS
GIMBAL SERVO AMPL
PULSE TORQUING
POWER SUPPLY
AC DIFF AMPL
AC DIFF AMPL
FORWARD BACKWARD
COUNTER
GIMBAL COARSE
ALIGN AMPL
I% POWER AMPL
BDE1,28V
INTERRO-GATOR
INTERRO-GATOR
PUL TORQUE SUP BACK UP
MODE
-28VDC POWER
SUPPLY
5% POWER AMPL
BOWE/
BINARY CURRENT SWITCH
BINARY CURRENT SW ITCH
O-A CONVERTER
I% POWER AMPL 3. DEC
MICR & SUSP
AAC 8008.18V
DC DIFF AMPL & PVR
DC DIFF AMPL & PVR
ENCODER
AUTO AMPL 2KC MICR & SUSP
EXCITATION
25. 6KC ENCODER
EXCITATION PIPA CALIB PI PA CAM
CDU ZEROING & LOCK RELAYS
TEMP CONT POWER
SUPPLY 3200,20V
LOAD COMPENSA- TION IMU
PULSE TORQUE
GYRO CAL
PULSE TORQUE
GYRO CAL LAMPS
FAILURE INDICATOR
TERNARY CURRENT SW ITCH
TRAY 6 CDU & POWER
SUPPLY ELECTRONICS
TRAY 7 MI SC
TRAY 9 OPTICAL
ELECTRONICS
TRAY 9 OPTICAL
ELECTRONICS
TRAY 10 POW DI & SIG COND
ELECTRONICS
MOTOR DRIVE AMPL & SELECTOR
TEMPERATURE CONTROLLER
MOTOR DRIVE AMPL
MOTOR DRIVE AMPL
SIGNAL CONDITIONER
CDU ZEROING XFMR & RELAYS
ENCODER OPTIC
2 - SPEED SWITCH
2-SPEED SWITCH
BLOCK DIODES
5% POWER AMPL
1300,x28V
PULSE TORQUING
POWER SUPPLY
COSECANT GENERATOR
ISOLATION XFMR
IN POWER AMPL
800.1,28V
CDU FIX RESTRANS & ENTRY MODE
MOTOR DRIVE PREAMPL
INTEGRATOR
MOTOR DRIVE PREAMPL
SERVO
JUNCTION BOX
ASSEMBLY
AAC 8008.28V
IMU TEMP IND ALARM & BACK UP CONTROL
RELAYS RELAYS
CDU RESOLVER
LOADS
BUFFER CIRCUIT
BUFFER CIRCUIT
RESOLVER DRIVE AMPL
DA CONVERTER
XFMR ZERO OPTICS
GN-9044A
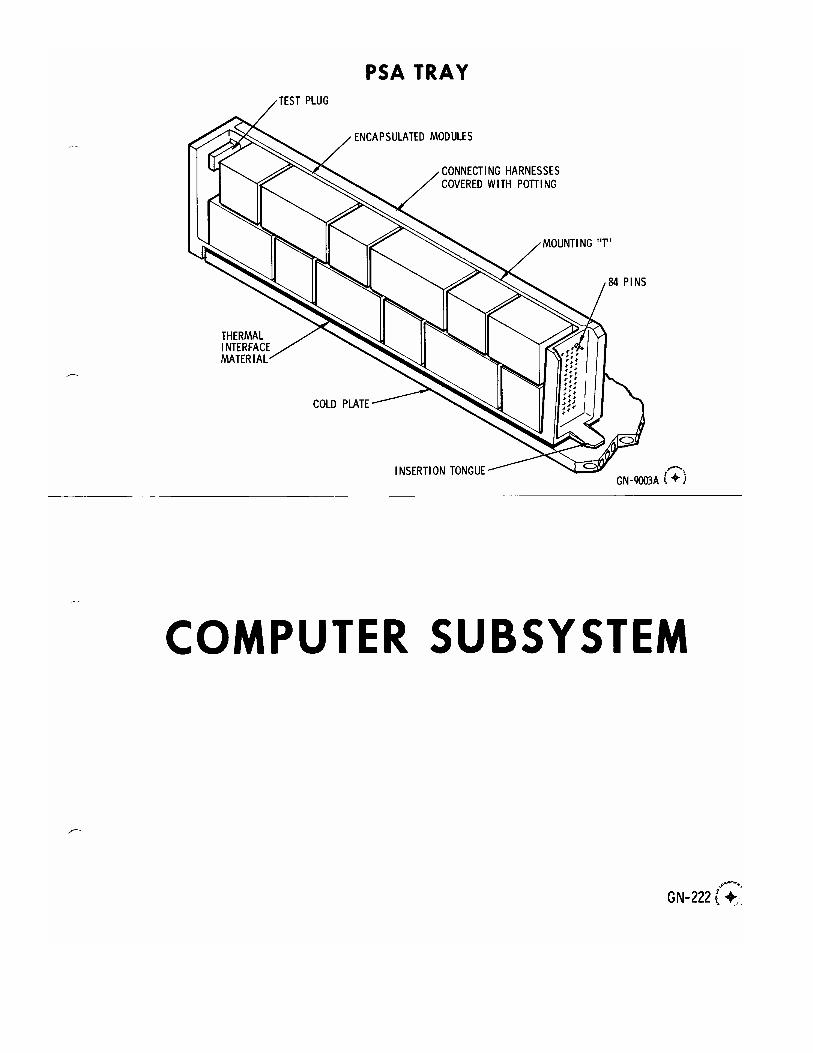
ENCAPSULATED MODULES
CONNECTING HARNESSES COVERED WITH POTTING
MOUNTING "T"
THERMAL INTERFACE MATER IAL
COLD PLATE
PSA TRAY
COMPUTER SUBSYSTEM
GN-222

COMPUTER SUBSYSTEM, GENERAL INTERFACE
DISPLAY DATA TO TELEMETRY'
BLOCK UPLINK
COMPUTER SUBSYSTEM
DISPLAY AND KEYBOARDS
( DSKY' SI
MODE SWITCHING
A I DISPLAY DATA AND
I ALARMS
MANUAL INPUTS
• SPACE-CRAFT
INERTIAL SUBSYSTEM
ALARMS 4
ENGINE CONTROL • RADAR TIMING, CONTROL, AND STATUS SIGNALS (NOT USED)
DOWNLINK WORD ALARMS
I MODE INDICATIONS
I VELOCITY INCREMENTS
I CDU POSITION
APOLLO GUIDANCE COMPUTER
I ALARMS
I CDU DRIVE SIGNALS
TIMING SIGNALS
'GYRO TORQUING COMMANDS
1M1■1=1■1
MODE SCANNING TELESCOPE INDICATIONS AND SEXTANT DRIVE
SIGNALS
OPTICAL SUBSYSTEM
SCANNING TELESCOPE AND SEXTANT SHAFT ANGLES
fr:), GN-215 O)/
TIMING SIGNALS 4
DOWNLINK SYNC SIGNALS
UPLINK WORD
AGC WORD FORMAT
DATA WORD ADDRESS
115 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0 1 I
OPERATION DATA WORD CODE ADDRESS
PARITY BIT
INSTRUCTION WORD
SIGN
DATA WORD NOTE EACH INSTRUCTION AND DATA WORD HAS ITS OWN ADDRESS WHICH DEFINES WHERE IT IS LOCATED IN THE MEMORY.
GN-9086Ai.

"R" ROPE
BANK BANK BANK BANK 1
I 2
I 3 I
BANK BANK BANK BANK 5 6 7 8
8 STRANDS
16 8 STRANDS STRANDS {
2 3 4 5 6 7 8
SELECTION x BOTTOM
SW ITCHES c(S3. 2 , I )
CORE ARRAY
RIN
G
132 X 32 X 16 1
FIXED MEMORY ORGANIZATION
WORD SELECTION
L SELECT 1 OF 3 ROPES (8,192 WDS OF 24,576 WDS)
2. SELECT 2 OF 8 BANKS (2,048 WDS OF 8,192 WDS)
3. SELECT 2 OF 256 CORES (16 WDS OF 2,048 WDS)
4. SELECT 1 OF 16 STRANDS (1 WD OF 16 WDS)
HSU
ROPE
"T" ROPE
••■•■
TOTAL WORDS - 24,576 TOTAL CORES - 3,072 1 ROPE - 8,192 WORDS
- 8 BANKS - 128 SENSE LINES - 16 STRANDS
1 BANK - 128 CORES -1024 WORDS
1 CORE - 8 WORDS
1/2 ROPE
112 ROPE
GN-9021B (i)
ADDRESSING, READING, AND WRITING INTO CORE ARRAY
GN-9020A

A 0 Z LP P B C X Y
U
I NO I NI I N2 I N3
OUTO OUT1 OUT2 OUI3 OUT4
• OUTPUT
INTERFACE
GN-9026A t, (9,A,
SEQUENCE GENERATOR
* 4' •
TIMING PULSES
TIMER j
COUNTER INCREMENT
PROGRAM INTERRUPT
PRIORITY CIRCUIT
0 I BNK r. 4 •
FIXED MEMORY
ERASABLE MEMORY
t CENTRAL PROCESSOR
INPUT INTERFACE
AGC GENERAL BLOCK DIAGRAM
no,
O
0
l■ Ca la ■ig
C4
as &VI E 4.;
.1P=2,1 O

A 0 Z LP P B C X Y
U
I NO I NI I N2 I N3
OUTO OUT1 OUT2 OUI3 OUT4
• OUTPUT
INTERFACE
GN-9026A t, (9,A,
SEQUENCE GENERATOR
* 4' •
TIMING PULSES
TIMER j
COUNTER INCREMENT
PROGRAM INTERRUPT
PRIORITY CIRCUIT
0 I BNK r. 4 •
FIXED MEMORY
ERASABLE MEMORY
t CENTRAL PROCESSOR
INPUT INTERFACE
AGC GENERAL BLOCK DIAGRAM
no,
O
0
l■ Ca la ■ig
C4
as &VI E 4.;
.1P=2,1 O

w O
co 4
z 0
OL OL 1.■
z
ua 0 4
0 '— vs
rii r: -1 F-- 1 1 1I
▪
L__J L__J L__J .
• F-- 1 r --1 ■ '4 li q iiq1
L__J L__J L__J L__J F-- 1
11 1 I L__J L__J L__J
0
0
1
0
• Q
KEY
BO
AR
D
O 0
[111 LC
r 1
ru
0
IJI
gyp'
ru
CO
INS
TRU
CTI
ON
0'
C.D

MEMORY
ADDRESSES COMMUNICATION LINK
ENGINE
CONTROL b. SPACECRAFT
DOWNL INK WORD
AGC POWER FAIL
ALARM ► SPACECRAFT AND INERTIAL
TIMING p. SUBSYSTEM
SIGNALS
CDU ► DRIVE INERTIAL SIGNALS SUBSYSTEM
GYRO ►
TORQUING COMMANDS
OPTICAL SCT AND ►
SUBSYSTEM SXT DRIVE SIGNALS
COMPUTER SUBSYSTEM 28 VDC (BUS AI II •
SPACECRAFT 28 VDC (BUS BI
ENGINE CONTROL
RADAR SIGNALS
SPACECRAFT UPLINK WORD
DOWNLINK SYNC
SIGNALS
OPTICAL SUBSYSTEM 1 SCT AND SXT
SHAFT ANGLES
CDU, PIPA. AND IMU ALARMS ►
MODE INDICATION
(INCLUDES MARK)
VELOCITY INCREMENTS
CDU POSITION
TIMER
+3 VDC AND TO ALL 111 FUNCTIONAL
+13 V DC AREAS
MANUAL INPUTS 11•■•■•
AND ALARMS • DOWNLINK SYNC SIGNALS
DOWNLINK END PULSE AND RATE SIGNALS
DATA INPUTS
OUTPUT PROGRAM INTERRUPTS AND COUNTER INCREMENTSJ
INHIBIT UPSYNC AND
CLEAR INO
t CONTROL PULSES
TO ALL FUNCTIONAL AREAS EXCEPT
DSKY'S REAL (ACCUMULATED) TIME WORD
► TO ALL FUNCTIONAL AREAS
POWER
MODE INDICATIONI.
INERTIAL SUBSYSTEM
INPUT
TEST AND RESET ALARMS
DISPLAY AND
KEYBOARDS (DSKY'S)
MODE SWITCHING AND ALARMS
DISPLAY DATA TO TELEMETRY
BLOCK UPLINK
DISPLAY DATA
MAIN TIME PULSES
V
PRIORITY CONTROL
ADDRESSES
INTERRUPT REQUEST AND
INSTRUCTION COMMANDS
DATA AND CENTRAL PARITY ALARM
PROCESSOR
SEQUENCE GENERATOR
ORDER CODE
TIMING PULSES
.SPACECRAFT
SPACECRAFT ► AND INERTIAL
SUBSYSTEM RADAR SIGNALS
110
START SIGNAL ► TO ALL FUNCTIONAL AREAS
EXCEPT INPUT AND DSKY'S
GUIDANCE k NAVIGATION ABBREVIATIONS
ACSP ADA
AGC AGE AMR
A.C. SPARK PLUG ANGULAR DIFFERENTIATING ACCELEROMETER APOLLO GUIDANCE COMPUTER APOLLO GUIDANCE EQUIPMENT ATLANTIC MISSILE RANGE
LOS LLOS LSB MGA MIT
LINE OF SIGHT LANDMARK LINE OF SIGHT LEAST SIGNIFICANT BIT MIDDLE GIMBAL AXIS MASSACHUSETTS INSTITUTE OF TECHNOLOGY
CDU C.G.
COUPLING DISPLAY UNIT CENTER OF GRAVITY
MAG AMP MSB
MAGNETIC AMPLIFIER MOST SIGNIFICANT BIT
CSS COMPUTER SUB SYSTEM M&DV MAP k DATA VIEWER
DNLK DOWNLINK NVB OR NB NAVIGATION BASE
DSPY DSKY
DISPLAY DISPLAY & KEYBOARD
OGA OA
OUTER GIMBAL AXIS OUTPUT AXIS
ECS ENVIRONMENT CONTROL SYSTEM OSS OPTICAL SUB SYSTEM
E/M E01
ERASABLE MEMORY
EARTH ORBIT INJECTION
PIP OR PIPA
PULSED INTEGRATING PENDULOUS ACCELEROMETER
EPS ELECTRICAL POWER SYSTEM PSA POWER SERVO ASSEMBLY
FDAI FLIGHT DIRECTOR ATTITUDE INDICATOR PRA PENDULOSITY REFERENCE AXIS
F/M FIXED MEMORY RCS REACTION CONTROL SYSTEM
G.C. GIMBAL CASE RSVR RESOLVER
IA NPUT AXIS SA SPIN AXIS
IRIG NERTIAL REFERENCE INTEGRATING GYRO S/C SPACECRAFT
IGA NNER GIMBAL AXIS SLOS STAR LINE OF SIGHT
IMU NERTIAL MEASUREMENT UNIT SCT SCANNING TELESCOPE
!SS NERTIAL SUB SYSTEM SCS STABILIZATION & CONTROL SYSTEM
1U NSTRUMENT UNIT SDOF SINGLE DEGREE OF FREEDOM
UN GUIDANCE & NAVIGATION SM STABLE MEMBER
KYBD KEYBOARD SRA SPIN REFERENCE AXIS
LNDMK LANDMARK SPS SERVICE PROPULSION SYSTEM
LOI LUNAR ORBIT INJECTION SXT SPACE SEXTANT
GN 244


















