Return to Session Menu DYNAMIC POSITIONING CONFERENCE October 9-10, 2012 ARCTIC/ICE OPERATIONS SESSION Numerical Simulation of Dynamic Positioning in Ice Ivan Metrikin and Sveinung Løset Norwegian University of Science and Technology (NTNU) Nils Albert Jenssen Kongsberg Maritime S fi K k i Sofien Kerk eni DCNS Research/Sirehna
Transcript
Return to Session Menu
DYNAMIC POSITIONING CONFERENCEOctober 9-10, 2012
ARCTIC/ICE OPERATIONS SESSION
Numerical Simulation of Dynamic Positioning in Ice
Ivan Metrikin and Sveinung LøsetNorwegian University of Science and Technology (NTNU)
Nils Albert JenssenKongsberg Maritime
S fi K k iSofien KerkeniDCNS Research/Sirehna
Numerical Simulation of Dynamic Positioning in Ice
Ivan Metrikin and Sveinung LøsetDepartment of Civil and Transport Engineering
Nils Albert JenssenKongsberg Maritime
Sofien KerkeniDCNS Research/Sirehna
A ti /I O ti
Norwegian University of Science and TechnologyTrondheim, Norway
Kongsberg, Norway Nantes, France
Arctic/Ice OperationsDynamic Positioning Conference9-10 Oct 2012 Houston, TX, USA
Contents• Fields of Application• Physical Ice Environment• Ice Loads Modeling for Numerical DP Simulations
– Empirical and Statistical Models– Experimental Data Series Methods– Physically Based Modeling
Fields of Application• Ice loads on ships • DP vessel concepts
10 Oct 2012 Ivan Metrikin et al. 4/31http://2.bp.blogspot.com/-SgnBviPQDPA/Tz_-jDm-r6I/AAAAAAAAC18/Ne21KAAF0hg/s1600/ice_breaker.jpg Screenshots from the DelftShip software, Parent 40 icebreaker model
Fields of Application• DP control schemes • Training simulators
10 Oct 2012 Ivan Metrikin et al. 5/31http://www.saltwaterpr.com/Content/Story/2010/Large/KM_Offshore_SIM_01_m.jpg www.smsc.no
Fields of Application• Multi-vessel operations • Risk assessment
10 Oct 2012 Ivan Metrikin et al. 6/31Rohlén, 2009 http://i.thestar.com/images/bf/16/f83e1e124d52bc368d949b6fe2cc.jpeg
Fields of Application• Integrated systems • Scientific research
10 Oct 2012 Ivan Metrikin et al. 7/31
Illustration: Bjarne Stenberg
Contents• Fields of Application• Physical Ice Environment• Ice Loads Modeling for Numerical DP Simulations
– Empirical and Statistical Models– Experimental Data Series Methods– Physically Based Modeling
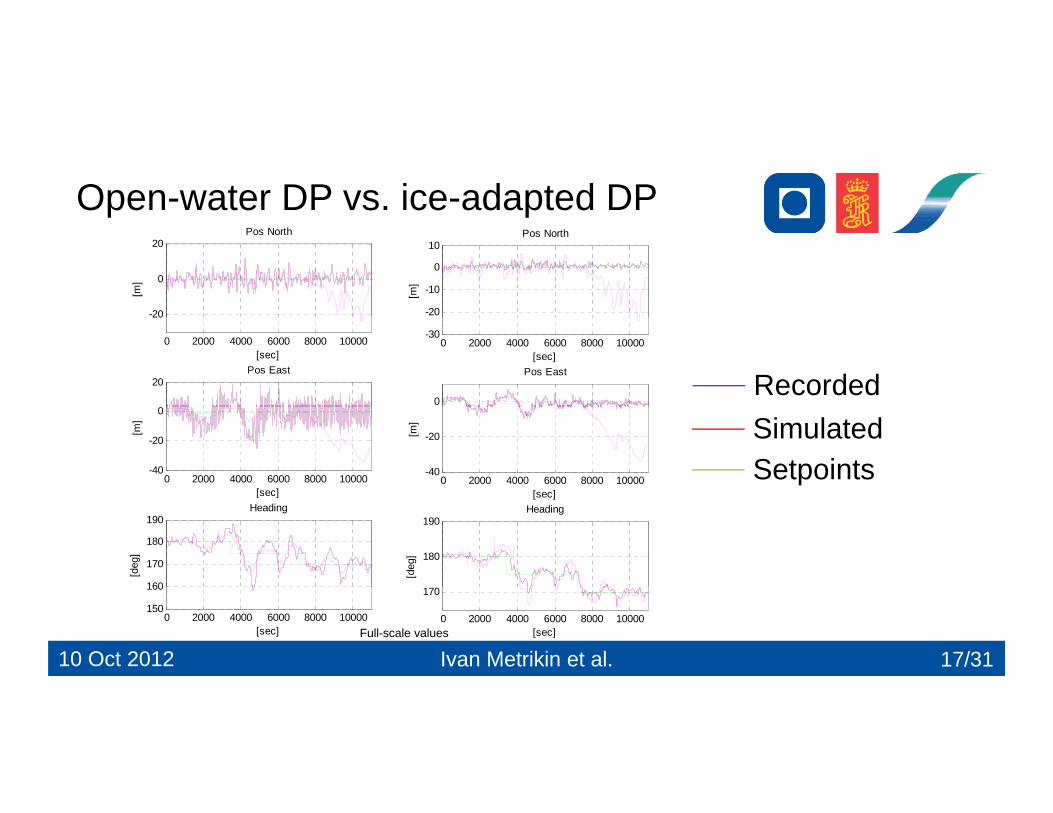
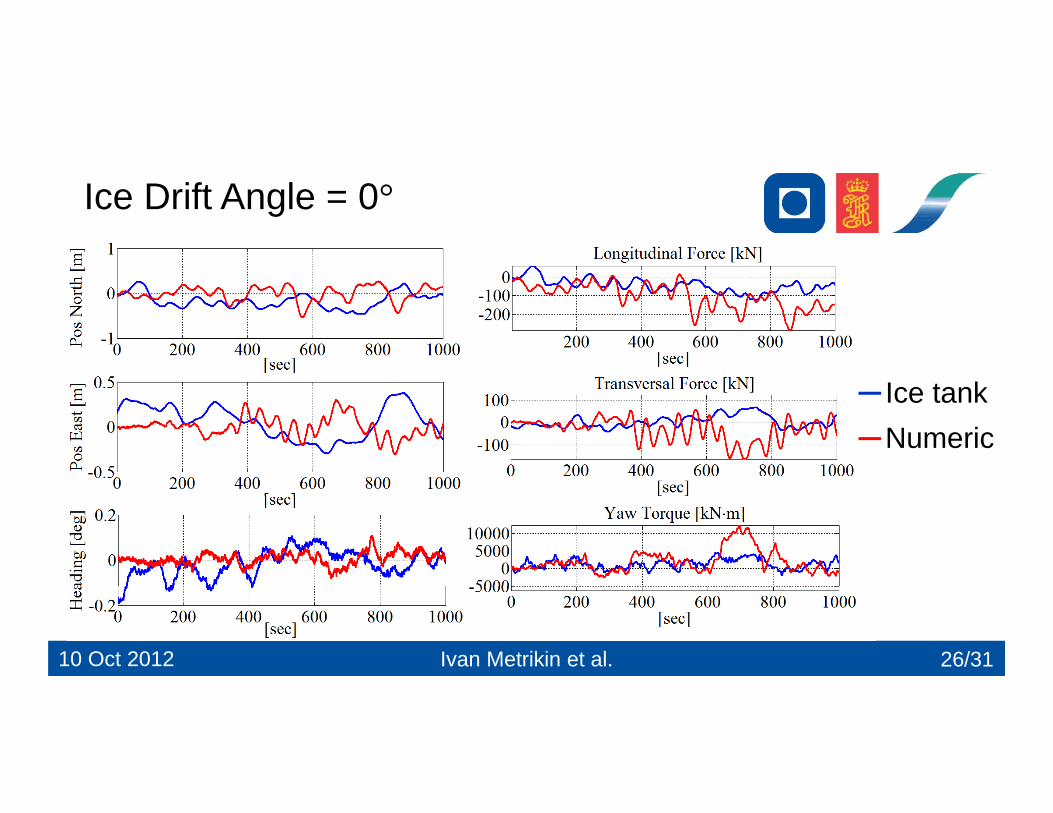
The same DP control system and the same tuning as in the ice basin
Ice Drift Angle = 0°
Ice tankNumeric
10 Oct 2012 Ivan Metrikin et al. 26/31
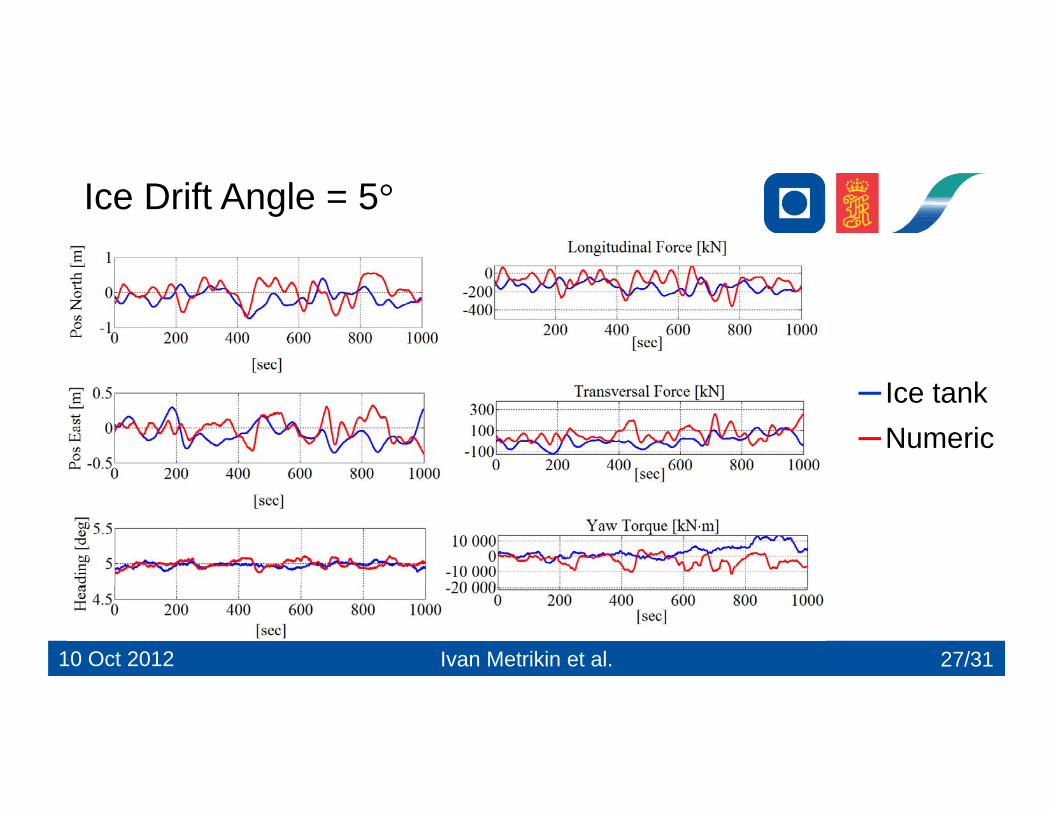
Ice Drift Angle = 5°
Ice tankNumeric
10 Oct 2012 Ivan Metrikin et al. 27/31
Ice Drift Angle = 10°
Ice tankNumeric
10 Oct 2012 Ivan Metrikin et al. 28/31
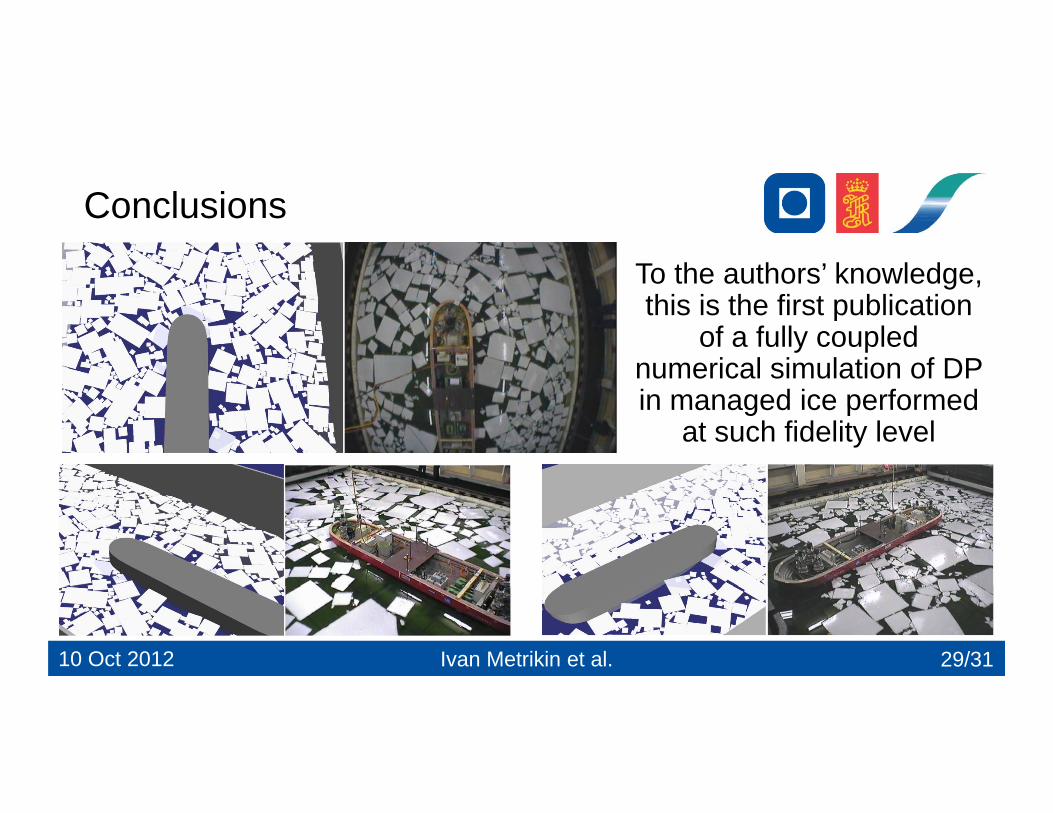
Conclusions
To the authors’ knowledge, this is the first publication p
of a fully coupled numerical simulation of DP in managed ice performedin managed ice performed
at such fidelity level
10 Oct 2012 Ivan Metrikin et al. 29/31
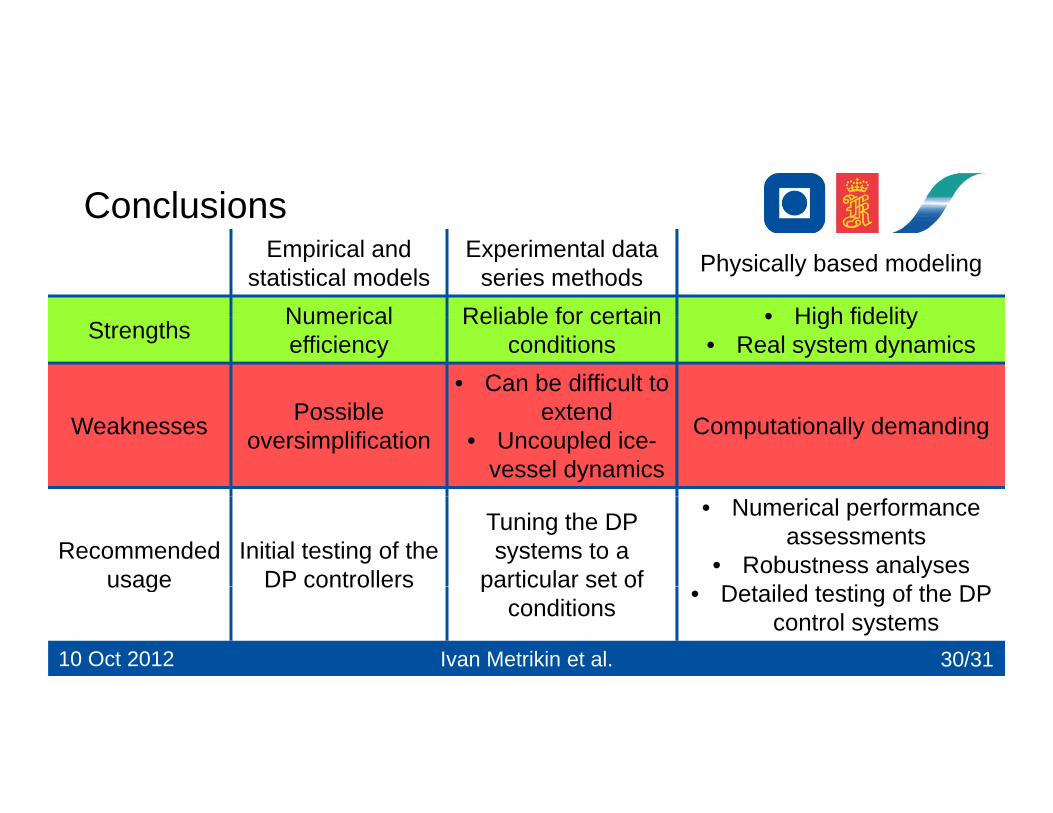
ConclusionsEmpirical and
statistical modelsExperimental data
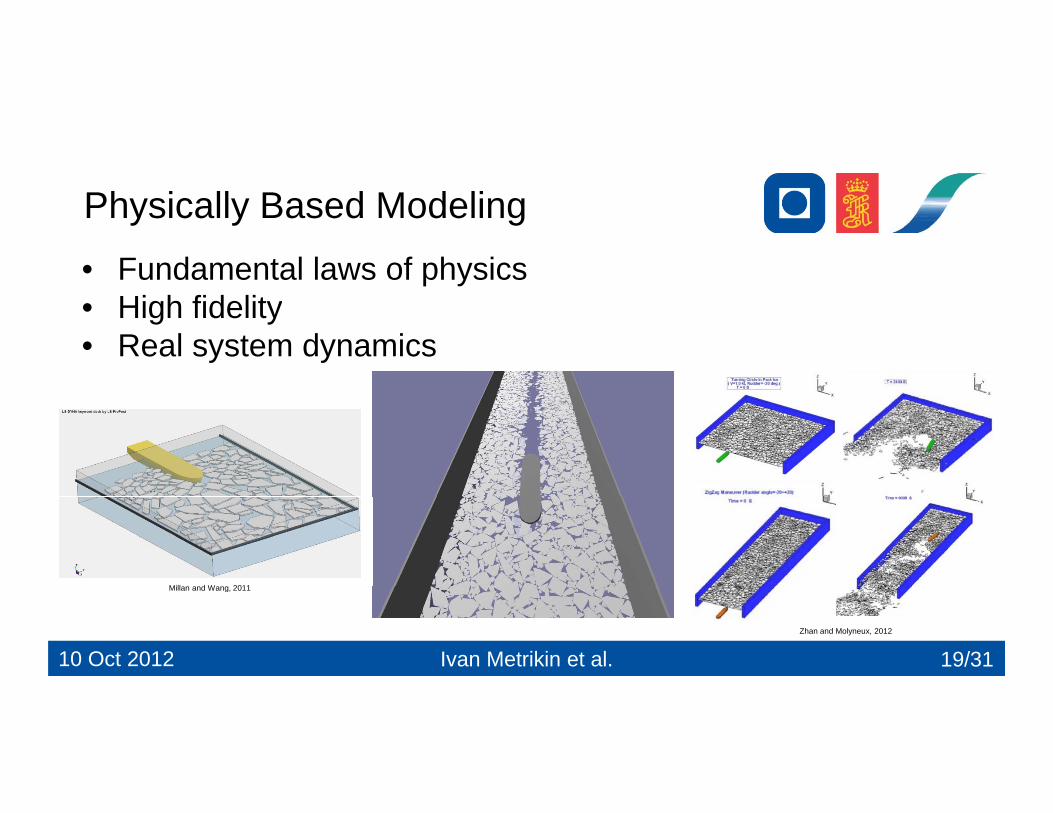
series methods Physically based modeling
Numerical Reliable for certain • High fidelityStrengths Numerical efficiency
Reliable for certainconditions
• High fidelity• Real system dynamics
P ibl• Can be difficult to
t dWeaknesses Possible oversimplification
extend• Uncoupled ice-
vessel dynamics
Computationally demanding
Recommended usage
Initial testing of the DP controllers
Tuning the DP systems to a
particular set of
• Numerical performance assessments
• Robustness analysesD t il d t ti f th DP
10 Oct 2012 Ivan Metrikin et al. 30/31
usage DP controllers particular set of conditions • Detailed testing of the DP
control systems
AcknowledgementsThe authors would like to thank the Research Council of Norway (RCN) for the financial support of the MARTEC ERA-NET project “DYPIC - Dynamic positioning in ice covered waters” (RCN Project No 196897) and the Arcticpositioning in ice covered waters (RCN Project No. 196897) and the Arctic DP project (RCN Project No. 199567/I40). The authors would also like to thank the Ministry of Ecology, Sustainable Development, Transport and Housing (France) and the Federal Ministry of Economics and Technology (G ) f f f C(Germany) for their financial support of the MARTEC ERA-NET project “DYPIC–Dynamic positioning in ice covered waters.” Additionally, the authors would like to thank their industry sponsor, Statoil ASA, their project partners Det Norske Veritas and Hamburg Ship Model Basin and thepartners, Det Norske Veritas and Hamburg Ship Model Basin, and the authors’ affiliated companies for the permission to publish this paper. Finally, the authors are thankful to Mr. Dmitry Sapelnikov (NTNU) for his efforts in implementing the NTNU numerical simulator