INTERNATIONAL JOURNAL OF GEOMATICS AND GEOSCIENCES
Volume 5, No 2, 2014
© Copyright by the authors - Licensee IPA- Under Creative Commons license 3.0
Research article ISSN 0976 – 4380
Submitted on August 2014 published on November 2014 332
Assessing uncertainty in fuzzy land cover classification by confusion index Ganesh Prasad M.S1, Manoj K. Arora2
1- Professor, Department of Civil Engineering, The National Institute of Engineering,
Mysore, India
2- Director, PEC University of Technology, Chandigarh, India
[email protected], [email protected]
ABSTRACT
In recent years, uncertainty has become an important subject in assessing the quality of
remote sensing image classification. Classification uncertainty is due to poor class definition,
transition zones and the presence of mixed pixels in remote sensing data. Fuzzy classification
approaches aim to estimate the proportions of specific classes that occur within each pixel.
Partial class membership values derived from fuzzy classification serve as baseline
information to assess classification uncertainties and allow the depiction of spatial variation
of uncertainty. Providing uncertainty information at pixel level may assist in increasing the
confidence in using thematic maps produced from remote sensing image classification. Many
metrics have been developed to quantify pixel-wise classification uncertainty. In the present
study, two formulations of confusion index are used. Literature state that, the two forms of
confusion index provide similar information. The present study aims at examining whether
these two formulations provide similar information or not. Multispectral image from Landsat-
7 ETM+ sensor was subjected to fuzzy c-means classification. The derived class membership
values for each pixel were used in quantifying classification uncertainty. A comparative
analysis of classification uncertainty provided by two forms of confusion index was carried
out. The results from the study show that the two forms of confusion index provide dissimilar
information on classification uncertainty.
Keywords: Remote sensing, Fuzzy classification, Quality, Uncertainty, Confusion index
1. Introduction
Remote sensing from satellite based sensors provides synoptic views of the earth surface at
regular time intervals, and has been considered as an attractive source of data acquisition.
Transformation of observed remote sensing data in the form of spectral responses into
thematic classes representing earth surface features is achieved by a number of image
classification procedures. Digital image classification in supervised mode is generally used to
produce land use and land cover maps from remotely sensed data. A conventional statistical
classifier like maximum likelihood classifier (MLC) allocates each pixel in the image to one
of the classes in which it has the highest probability of membership. The uses of such ‘hard’
or ‘crisp’ classification methods are only appropriate when the classes are discrete and
mutually exclusive. However, most of the land use/land cover features are continuous rather
than discrete. Classifying continuous features as discrete may result in loss of information
about the spatial distribution of a thematic class.
Fuzzy logic introduced by Zadeh (1965) can be used to classify and assess continuous
thematic classes. The use of fuzzy classification to produce accurate and reliable land cover
maps is gaining importance due to its continuous nature of class representation. Fuzzy
Assessing uncertainty in fuzzy land cover classification by confusion index
Ganesh Prasad M.S and Manoj K. Arora
International Journal of Geomatics and Geosciences
Volume 5 Issue 2, 2014 333
classification is a quantitative, iterative method for classifying thematic classes as continuous
over geographic space. Fuzzy classification approaches aim to estimate the proportions of
specific classes that occur within each pixel.
It has been reported that fuzzy classification approaches provide a general though not optimal
solution to mixed pixel problem. The strong relationship between fuzzy membership values
and true proportions of land cover classes has been supported by Maselli et al. (1994),
Atkinson et al. (1997), Deer and Eklund (2003). Further, extraction of class proportions in a
pixel through fuzzy classification facilitates to derive information on classification
uncertainties that are beyond the possibilities of conventional error matrix approach. This has
been advantageous to users who are in need of uncertainty information for their specific
applications and to indicate the quality of classification.
In recent years, uncertainty has become an important subject in remote sensing and has
attracted attention of many researchers (Canters, 1997; Kiiveri, 1997; Heuvelink, 1998;
Foody, 2002) and is a key issue in data quality assessment. Providing uncertainty
information at pixel level may assist in increasing the confidence in using thematic maps
produced from digital classification of remote sensing data.
This paper attempts to quantify classification uncertainty associated with an image pixel
using two measures suggested by Burrough et al. (1997). A comparison of results obtained
from these two measures is also made. For the purpose, class membership values derived
from fuzzy –c means classification of Landsat ETM+ data is used. This paper is organized
into four sections. The next section briefly discusses the experimental data used. Section 3
describes fuzzy classification of experimental data and subsequent estimation of classification
uncertainty using two forms of confusion index. In Section 4, a comparison of two forms of
confusion index is made based on experimental results and hypothetical examples. Finally,
summary and conclusions are provided in Section 5.
2. Experimental data description
The remote sensing data considered for this study is a multi-spectral image from Landsat-7
ETM+ sensor, which acquires data in eight spectral bands . The size of the image considered
for this study is 327 x 221 pixels, with spatial resolution of 30 meter, covering a part of
Syracuse city area in U.S.A. Although, the sensor acquires the data in different spectral bands,
only six are considered here, since the spatial resolutions of panchromatic (band 8) and
thermal infrared band (band 6) are different from other bands. Of the 6 bands available , three
bands viz. band 2 (0.52-0.6 µm), band 3 (0.63-0.69 µm) and band 5 (1.55-1.75 µm ) were
selected for classification purpose.
Transformed divergence was used in this study to select the best set of bands from
multispectral images. Transformed divergence (TD) was computed based on the training
data statistics. The larger the TD, the greater is the separation between the training signatures
of those classes. A TD value of 2000 suggests an excellent separability; a value of 1900
provides good separation and values less than 1700 represent poor separability between
classes (Jensen, 1986). From the transformed divergence analysis conducted on all the six
bands in synthetic and remote sensing dataset, a TD value of 2000 was obtained for the
combination of bands 2, 3 and 5. Therefore, these three bands were used as input into the
classifier selected for deriving class membership values.
Figure 1 shows the false colour composite (FCC) of the image of the study area. The central
portion of the image consists of urban area, whereas, remaining portion of the image is
mostly covered by vegetation. The urban area also covers a diverse environment including
Assessing uncertainty in fuzzy land cover classification by confusion index
Ganesh Prasad M.S and Manoj K. Arora
International Journal of Geomatics and Geosciences
Volume 5 Issue 2, 2014 334
lakes, parks, residential area, vegetation and roads, thereby introducing spatial complexity
due to class mixture and overlapping, and thus may be regarded as area with high uncertainty
in class allocation. Keeping in view the diverse environmental characteristics of the study
area, five major land cover classes were selected. These classes include, trees, grass, bare
soil, water and impervious. The characteristics of these classes are given in Table 1.
In the present data set, for example, the classes, trees and grass generally tend to overlap due
to spectral similarities. Further, the class impervious which consists of buildings, roads etc.,
may sometimes include the other class viz., bare soil. This overlapping of class definition
introduces uncertainty in class allocation. Moreover, the data itself consists of large quantity
of mixed pixels (about 45%), which contribute to the aspects of classification uncertainty to a
large extent.
Table 1: Characteristics of major thematic classes in the study area
Thematic classes considered for
classification
Description
Trees Forest, variety of native plants
Grass Open space, shrubs, golf course,
play grounds, parks, lawns
Bare soil Exposed soil surfaces, patches
Water Lakes, ponds, channels
Impervious Residential area, major and minor
roads, open roof
Figure 1: False colour composite of the Landsat ETM+ sensor data
(Red: band 5, Green: band 3, Blue: band 2)
3. Fuzzy classification
Fuzzy c-means classifier (FCM) described by Bezdek et al. (1984) was adopted to classify
the study image. This algorithm has proven especially popular (Legleiter and Goodchild,
2005: Bastin, 1997: Wu and Yang, 2002: Yang et al., 2003) and has been used to produce
land cover maps from remotely sensed data (Zhang and Stuart, 2001). In most of the
situations the FCM classifier may be advantageous (Shalan et al., 2003) as it is not dependent
Assessing uncertainty in fuzzy land cover classification by confusion index
Ganesh Prasad M.S and Manoj K. Arora
International Journal of Geomatics and Geosciences
Volume 5 Issue 2, 2014 335
on the data distributional assumptions. The fuzzy membership values derived from FCM
range between 0 (no membership) and 1 (full membership) and specify the degree of
belongingness of a pixel to a specific class. Although, FCM is an unsupervised classifier
(Bezdek et al., 1984) it may be used in supervised mode (Key et al., 1989: Foody, 2000).
Fuzzy c-means algorithm is an iterative clustering algorithm which subdivides data into c-
clusters or classes. The algorithm is based on iterative optimization of an objective function
Jm, which is a generalised least squared errors function and is defined as (Bezdek, 1981),
( ) ∑ −∑==
=c
k A
mN
jm vxJ kjjkXVU
1
2
1
)(:, µ (1)
where U is a fuzzy c partition of dataset X containing N pixels.
xj = vector denoting spectral response of a pixel j
c = fixed and known number of clusters in X ;
m = weighting exponent or fuzzy exponent; 1 ≤ m ≤ ∞ which defines the degree of fuzziness
(µ jk)m = the mth power of xj s membership in cluster k.
V is the collection of cluster centres vk, ║xj–vk║2A is the squared distance djk between xj and vk
with )()(2
2vxvxvxd kj
T
Ajk Akjkj −== −−
where A = positive definite weight matrix
Given the values of c and m, the algorithm iteratively assigns pixels to clusters and
recalculates cluster centres until Jm achieves a local minimum. The fuzzy partition U =
[ µ jk ] is referred to as the grade of membership of xj to the cluster k with µ jk ∈ [0, 1] .
The formulation of FCM contains a weighting factor m, which describes the degree of
fuzziness to be provided in the classification. The value of m varies from 1 (no fuzziness or
hard classification) to ∞ (complete fuzziness), however a value in the range of 1.5 to 3 may
be generally adopted (Shalan et al., 2003). Through several experiments, a value of 2.0 was
found to be suitable for the classification of this dataset. The number of training samples were
201, 172, 31, 204 and 296 for the classes trees, grass, bare soil, water and impervious
respectively. In this study, FCM classification in supervised mode using Euclidean distance
metric has been performed on PARBAT (www.lucieer.net, 2014), a public domain software
for advanced remote sensing image processing and visual fuzzy classification.
The results of the classification were five fraction images (Figure 2 (a) to (e)) corresponding
to five land cover classes considered in the experiment. In Figure 2(a) to (e), bright pixels
indicate higher class membership values. And, darker pixels correspond to lower values of
class membership. When each pixel is assigned to the class to which it has the highest
membership, the result is a ‘defuzzified’ or ‘hardened’ image equivalent to a classified image.
The defuzzified image is shown in Figure 2 (f). As expected the two classes trees and grass
overlapped in the outer portion of the image (See Figure 2), where as the class water is
correctly classified. However, the class impervious tends to get mixed up with other classes
viz. trees and grass. A small amount of overlap is also observed between the classes bare soil
and impervious.
Assessing uncertainty in fuzzy land cover classification by confusion index
Ganesh Prasad M.S and Manoj K. Arora
International Journal of Geomatics and Geosciences
Volume 5 Issue 2, 2014 336
(a) Trees (b) Grass
(b) Bare soil (d) Water
(e) Impervious (f) Defuzzified image
Figure 2: Class membership images (fraction images) derived from FCM classification
(fuzzy exponent m =2) and defuzzified image showing thematic classes.
3.1 Classification Uncertainty
The main idea of fuzzy classification approach is to associate a pixel with every class
considered in the classification scheme, with variable degree of class memberships. Partial
class membership values derived from fuzzy classification can serve as baseline information
to assess classification uncertainties and allow the depiction of spatial variation of
uncertainty. To elaborate this, if we consider the output of a fuzzy classifier for a given pixel,
the output is a finite set of class membership values. Larger is the set of membership values
for a pixel, lesser is the precision of information available and higher is the ambiguity.
Further, for some regions class membership values may be equal or nearly equal in a pixel.
The more similar the membership values for two or more classes, the greater the confusion
about to which class a pixel actually belongs. In such cases too, it is not clear that which class
dominates and may lead to a state of ambiguity. In such a situation, the ambiguity in class
assignment can be represented by measures such as entropy (Maselli et al., 1994), Quadratic
score (Glasziou and Hilden, 1989: Fatemi et al., 2004 ), non- specificity, U-uncertainty
(Dubois and Prade, 1987: Ricotta, 2005) and confusion index (Burrough et al., 1997). In the
present study, a measure of ambiguity viz. confusion index in difference and ratio forms
suggested by Burrough et al., (1997) is considered for the quantification of classification
uncertainty.
Assessing uncertainty in fuzzy land cover classification by confusion index
Ganesh Prasad M.S and Manoj K. Arora
International Journal of Geomatics and Geosciences
Volume 5 Issue 2, 2014 337
Let µjk
be the class membership value of jth pixel in kth class, with k = 1,2,…. n classes,
and 10 ≤≤ µjk
with the normalization constraint of 11
=∑=
n
kjk
µ ,which is generally imposed in
fuzzy classification. Further, let { }n
jjjjC µµµµµ .,.........,,)(321
= be an ordered (in descending
order) fuzzy set having class membership values of a pixel j in which the numbers 1,2…n
indicate first highest membership, second highest membership ( µn
j will obviously be
minimum).
Consider the first and second highest class membership values µ1
j, µ
2
j for a pixel j. The
difference between these two is an indirect representation of conflict in assigning the pixel to
one of the classes. For example, if the difference is large, it is an indication of lesser conflict.
On the other hand, a difference of zero or near zero indicates high degree of conflict. Let the
difference between the first and second highest membership values be D, given by
D = ( µ1
j- µ
2
j ) (2)
Normalizing the difference with the maximum membership value and deducting it from the
total membership of one, yields a measure of confusion as,
Measure of confusion = µ
µµ
max
21)(
1jj
−− (3)
where µmax is the maximum class membership value for the pixel j. The denominator in the
second term, i.e., µmax can take two values. A value of 1, which is the limiting value of
membership or the maximum class membership value as derived from classification process.
When the second term in Eq. (3) is normalized with respect to µmax
=1, the measure of
confusion will be equal to 1 - ( µ1
j- µ
2
j ). When it is normalized with respect to maximum
membership value for the pixel, i.e., µ1
j, the measure of confusion will be equal to
µ
µ1
2
j
j.
Burrough et al., (1997) provided these two formulations (Eq. (4) and (5)) and termed both as
confusion index (CI).
µ
µ1
2
j
jCI = (4)
)(121
µµ jjCI −−= (5)
CI can take values between 0 and 1. If CI → 0, then one class dominates and there is little
confusion in allocating pixel to that class and the degree of uncertainty is low. If CI → 1, then
both µ1
j and µ
2
j are equal or near equal and there is maximum confusion about the class to
which the pixel belongs and the degree of uncertainty is high. Ideally, in a land use/land
cover map derived from FCM classification, the zones represented by those pixels with CI
values equal to 1 or nearly 1 would indicate the geographic boundaries between fuzzy classes.
Burrough et al., (1997), while providing the two formulations of CI, stated that these two
produce similar results. Legleiter and Goodchild (2005) termed these two formulations (Eq. 4
and Eq. 5) as ratio (CIratio) and difference (CIdifference) forms of confusion index. and utilized
them to derive maps of classification uncertainty to identify heterogeneous and complex areas.
Assessing uncertainty in fuzzy land cover classification by confusion index
Ganesh Prasad M.S and Manoj K. Arora
International Journal of Geomatics and Geosciences
Volume 5 Issue 2, 2014 338
However, it is not known whether these two formulations produced similar maps of
classification uncertainty.
Anomalies can be observed in depicting the quality of classification based on uncertainty
estimated using two forms of confusion index. For instance, consider one of the cases where
the highest membership value µ1
j = 0.4 and the second highest membership value µ
2
j = 0.15
for a pixel. The value of uncertainty estimated for this case by the ratio form of confusion
index is 0.375, while it is equal to 0.75 by the difference form of confusion index. If the ratio
form of confusion index is used to represent classification uncertainty, the value of 0.375 for
this pixel can generally be considered as low. Correspondingly, if one wants to express the
quality of classification based on uncertainty, a value of 0.375 does not draw much attention.
On the other hand, if the difference form of confusion index is used for the same pixel,
uncertainty value of 0.75, which is twice that of the value provided by CIratio, is considered as
a high value and hence the thematic quality of the pixel may be treated as significantly
ambiguous. Due to these anomalies between the two forms of confusion index, quality
assessment process itself may be dubious. Therefore, this study aims at comparing the
results obtained from the two formulations of confusion index. Such a comparative
evaluation of two forms of confusion indices may help in understanding their behaviour and
relative efficacies.
To quantify classification uncertainty, the derived fuzzy membership values have been
arranged in descending order (i.e., images showing the highest membership values, second
highest membership values and third highest membership values etc.) and have been used as
input to computational models. Based on the formulations for confusion index CI (Eq. 4 and
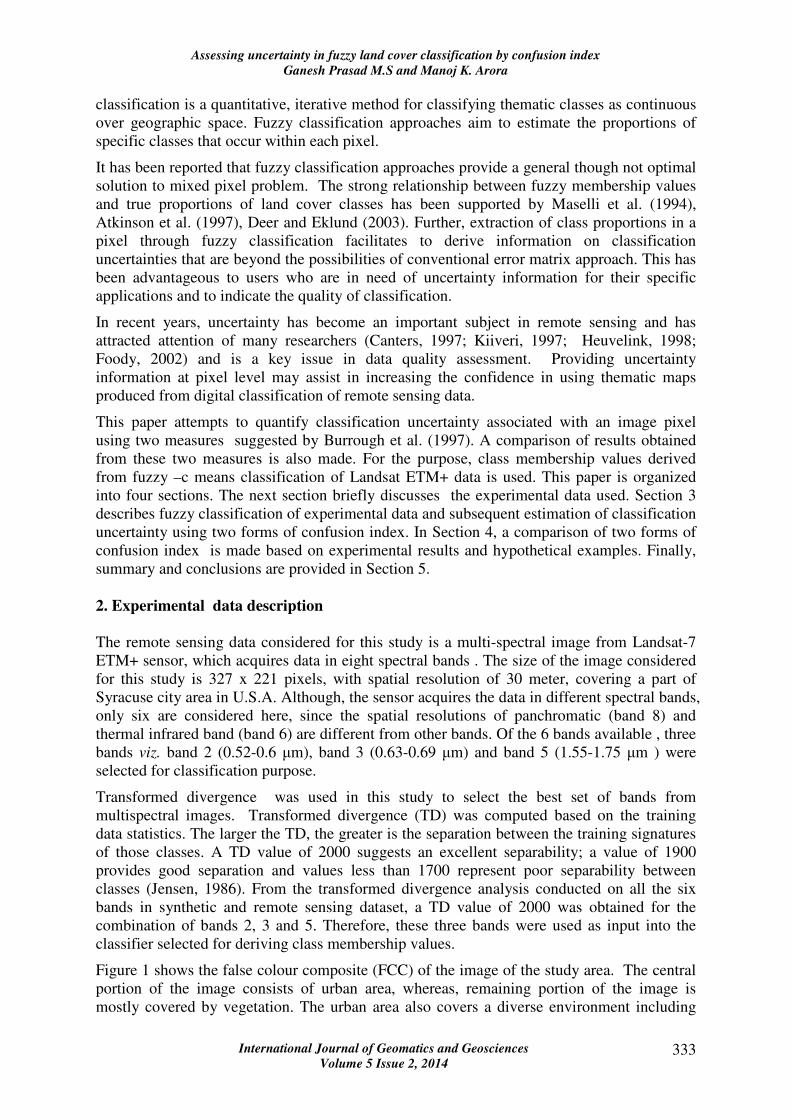
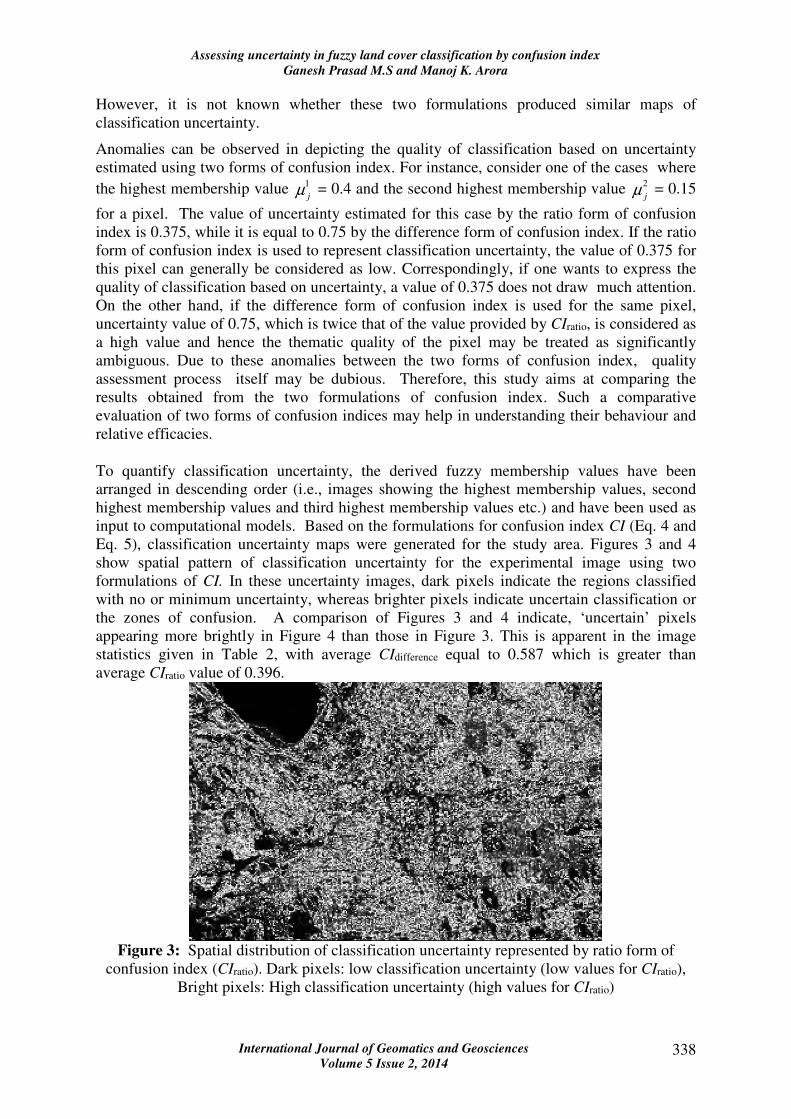
Eq. 5), classification uncertainty maps were generated for the study area. Figures 3 and 4
show spatial pattern of classification uncertainty for the experimental image using two
formulations of CI. In these uncertainty images, dark pixels indicate the regions classified
with no or minimum uncertainty, whereas brighter pixels indicate uncertain classification or
the zones of confusion. A comparison of Figures 3 and 4 indicate, ‘uncertain’ pixels
appearing more brightly in Figure 4 than those in Figure 3. This is apparent in the image
statistics given in Table 2, with average CIdifference equal to 0.587 which is greater than
average CIratio value of 0.396.
Figure 3: Spatial distribution of classification uncertainty represented by ratio form of
confusion index (CIratio). Dark pixels: low classification uncertainty (low values for CIratio),
Bright pixels: High classification uncertainty (high values for CIratio)
Assessing uncertainty in fuzzy land cover classification by confusion index
Ganesh Prasad M.S and Manoj K. Arora
International Journal of Geomatics and Geosciences
Volume 5 Issue 2, 2014 339
Figure 4: Spatial distribution of classification uncertainty represented by difference form of
confusion index (CIdifference). Dark pixels: low classification uncertainty (low values for
CIdifference), Bright pixels: High classification uncertainty (high values for CIdifference)
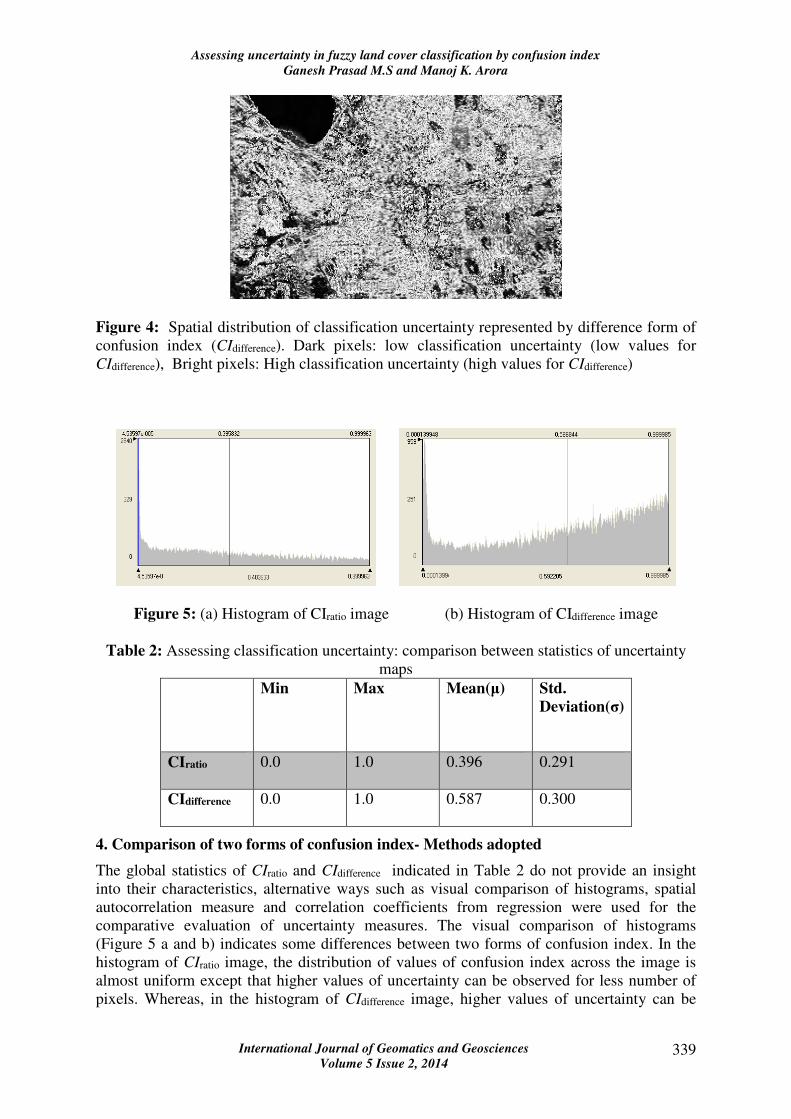
Figure 5: (a) Histogram of CIratio image (b) Histogram of CIdifference image
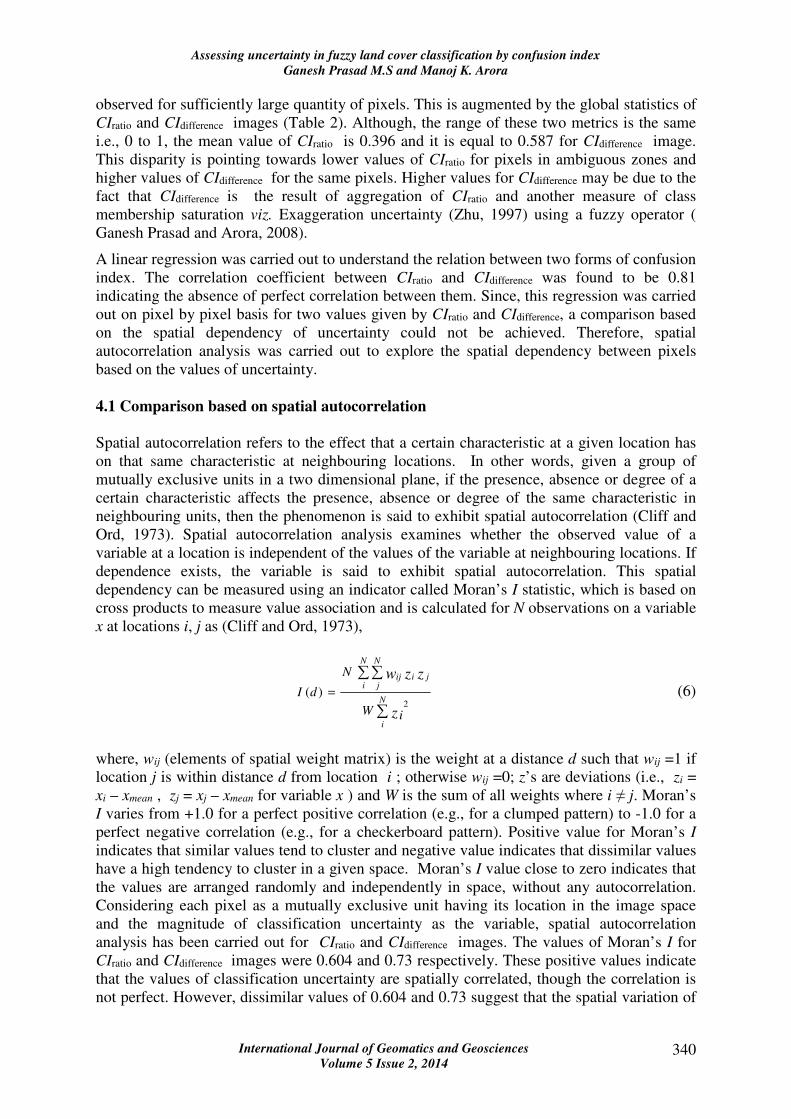
Table 2: Assessing classification uncertainty: comparison between statistics of uncertainty
maps
Min Max Mean(µ) Std.
Deviation(σ)
CIratio 0.0 1.0 0.396 0.291
CIdifference 0.0 1.0 0.587 0.300
4. Comparison of two forms of confusion index- Methods adopted
The global statistics of CIratio and CIdifference indicated in Table 2 do not provide an insight
into their characteristics, alternative ways such as visual comparison of histograms, spatial
autocorrelation measure and correlation coefficients from regression were used for the
comparative evaluation of uncertainty measures. The visual comparison of histograms
(Figure 5 a and b) indicates some differences between two forms of confusion index. In the
histogram of CIratio image, the distribution of values of confusion index across the image is
almost uniform except that higher values of uncertainty can be observed for less number of
pixels. Whereas, in the histogram of CIdifference image, higher values of uncertainty can be
Assessing uncertainty in fuzzy land cover classification by confusion index
Ganesh Prasad M.S and Manoj K. Arora
International Journal of Geomatics and Geosciences
Volume 5 Issue 2, 2014 340
observed for sufficiently large quantity of pixels. This is augmented by the global statistics of
CIratio and CIdifference images (Table 2). Although, the range of these two metrics is the same
i.e., 0 to 1, the mean value of CIratio is 0.396 and it is equal to 0.587 for CIdifference image.
This disparity is pointing towards lower values of CIratio for pixels in ambiguous zones and
higher values of CIdifference for the same pixels. Higher values for CIdifference may be due to the
fact that CIdifference is the result of aggregation of CIratio and another measure of class
membership saturation viz. Exaggeration uncertainty (Zhu, 1997) using a fuzzy operator (
Ganesh Prasad and Arora, 2008).
A linear regression was carried out to understand the relation between two forms of confusion
index. The correlation coefficient between CIratio and CIdifference was found to be 0.81
indicating the absence of perfect correlation between them. Since, this regression was carried
out on pixel by pixel basis for two values given by CIratio and CIdifference, a comparison based
on the spatial dependency of uncertainty could not be achieved. Therefore, spatial
autocorrelation analysis was carried out to explore the spatial dependency between pixels
based on the values of uncertainty.
4.1 Comparison based on spatial autocorrelation
Spatial autocorrelation refers to the effect that a certain characteristic at a given location has
on that same characteristic at neighbouring locations. In other words, given a group of
mutually exclusive units in a two dimensional plane, if the presence, absence or degree of a
certain characteristic affects the presence, absence or degree of the same characteristic in
neighbouring units, then the phenomenon is said to exhibit spatial autocorrelation (Cliff and
Ord, 1973). Spatial autocorrelation analysis examines whether the observed value of a
variable at a location is independent of the values of the variable at neighbouring locations. If
dependence exists, the variable is said to exhibit spatial autocorrelation. This spatial
dependency can be measured using an indicator called Moran’s I statistic, which is based on
cross products to measure value association and is calculated for N observations on a variable
x at locations i, j as (Cliff and Ord, 1973),
∑
∑∑
=N
i
N
i
N
jjiij
z
zzw
iW
N
dI2
)( (6)
where, wij (elements of spatial weight matrix) is the weight at a distance d such that wij =1 if
location j is within distance d from location i ; otherwise wij =0; z’s are deviations (i.e., zi =
xi – xmean , zj = xj – xmean for variable x ) and W is the sum of all weights where i ≠ j. Moran’s
I varies from +1.0 for a perfect positive correlation (e.g., for a clumped pattern) to -1.0 for a
perfect negative correlation (e.g., for a checkerboard pattern). Positive value for Moran’s I
indicates that similar values tend to cluster and negative value indicates that dissimilar values
have a high tendency to cluster in a given space. Moran’s I value close to zero indicates that
the values are arranged randomly and independently in space, without any autocorrelation.
Considering each pixel as a mutually exclusive unit having its location in the image space
and the magnitude of classification uncertainty as the variable, spatial autocorrelation
analysis has been carried out for CIratio and CIdifference images. The values of Moran’s I for
CIratio and CIdifference images were 0.604 and 0.73 respectively. These positive values indicate
that the values of classification uncertainty are spatially correlated, though the correlation is
not perfect. However, dissimilar values of 0.604 and 0.73 suggest that the spatial variation of
Assessing uncertainty in fuzzy land cover classification by confusion index
Ganesh Prasad M.S and Manoj K. Arora
International Journal of Geomatics and Geosciences
Volume 5 Issue 2, 2014 341
CIratio is different than CIdifference . The results from visual comparison of uncertainty maps,
image histograms and correlation analysis have pointed towards a clear distinction between
the information on uncertainty conveyed by the two forms of confusion index. Although,
Burrough et al., (1997) stated that two forms of confusion index produce similar results, it
does not appear so as indicated here.
4.2 Comparison based on zonation
From the hypothetical example discussed in 3.1, it is evident that under certain situations
there occurs a considerable difference between two forms of confusion index. Therefore, in
order to verify whether the anomaly between two forms of confusion index is significant for a
dataset, a simple approach has been adopted here. In this approach, the pixels have been
grouped into four qualitative zones. This has been done using two criteria.
Criterion I: Four qualitative zones corresponding to low, medium, high and very high values
of confusion index have been considered. These four zones correspond to the values in the
range (0.0 - 0.25), (0.25 to 0.50), (0.50 to 0.75) and (0.75 to 1.0). This zonation was done
arbitrarily. The percentage of pixels in each zone is represented in Figure 6. In medium and
high zones of uncertainty the variation between CIratio and CIdifference is 8.67% and 6.52%
respectively. In the zone of low uncertainty CIratio has 20.17% pixels more than CIdifference ,
where as CIdifference has 22.31% more pixels than CIratio in the zone of very high uncertainty.
Criterion II: In this approach, zonation is made based on image statistics of CIratio and
CIdifference i.e., mean (µ) and standard deviation (σ). Percentage of pixels with low
uncertainty (≤(µ - σ)), medium ((µ - σ) to µ), high (µ to (µ + σ)) and very high uncertainty (>
(µ + σ)) are represented in Figure 7.
In the zone of low uncertainty the variation between CIratio and CIdifference is less and is equal
to 0.13% , whereas in the zone of high uncertainty the variation is 1.78% only. In the zone of
medium uncertainty CIratio has 10.99% pixels more than CIdifference , where as CIdifference has
12.9% more pixels than CIratio in the zone of very high uncertainty.
Figure 6: Comparison of CIratio and CIdifference based on number pixels in each of the
four bins of equal size
Assessing uncertainty in fuzzy land cover classification by confusion index
Ganesh Prasad M.S and Manoj K. Arora
International Journal of Geomatics and Geosciences
Volume 5 Issue 2, 2014 342
Figure 7: Comparison of CIratio and CIdifference based on number pixels in each of the
four bins of unequal size
Therefore, from the results obtained by the comparison of percentage of pixels in different
zones (low, medium, high and very high) based on the values of CIratio and CIdifference (criteria
I and II), it is evident that the two forms of confusion index behave differently for a given
classification.
From this analysis, it is observed that the difference exists in the depiction of quality of a
pixel using ratio and difference forms of confusion index both qualitatively and spatially.
Therefore, the information on classification uncertainty in the form of confusion as expressed
by the two forms of confusion index is considered as different and the two forms of confusion
index does not provide similar results as stated by Burrough et al.,(1997).
5. Summary and conclusions
Uncertainty plays a vital role in land use land cover classification of remotely sensed data.
When the remotely sensed data to be classified consists of abundant mixed pixels and /or
overlapping classes for example, different types of vegetation, classification of such an image
results in high degree of uncertainty. Fuzzy classification of land use/land cover provides a
framework that allows partial memberships in multiple classes and gradual transition between
fuzzy classes, which can be considered as an advantage over conventional crisp classification.
Class membership values derived from FCM classification are used to quantify pixel wise
classification uncertainty, which further be used to represent spatial pattern of classification
uncertainty. Uncertainty maps thus generated are useful in identifying and quantifying areas
of high/low classification reliability. Burrough’s confusion index (CI) used in this study can
be appropriate in knowing to what extent the spatial distribution of thematic classes derived
from fuzzy classification is ambiguous. The objective of this paper is to compare
classification uncertainty maps derived from two formulations of confusion index. Although,
the two forms of confusion index are intended to provide similar information, certain
situations may exist when these two exhibit considerable difference. A comparative analysis
Assessing uncertainty in fuzzy land cover classification by confusion index
Ganesh Prasad M.S and Manoj K. Arora
International Journal of Geomatics and Geosciences
Volume 5 Issue 2, 2014 343
of classification uncertainty provided by two forms of confusion index is carried out. The
result from the study shows that the two forms of confusion index provide dissimilar
information on classification uncertainty both quantitatively and spatially. It is difficult to
suggest any one form of confusion index measure as appropriate or ideal measure of
classification uncertainty. However, it is concluded here that the selection of an appropriate
measure of classification uncertainty may be made by considering the factors viz., quantity of
mixed pixels present in the image to be classified, the type of uncertainty to be represented
and the theoretical framework of uncertainty measure.
6. References
1. Atkinson, P.M., Cutler, M.E.J., and Lewis, H., 1997, Mapping sub-pixel proportional
land cover with AVHRR imagery, International Journal of Remote Sensing, 18, pp
917-935.
2. A-Xing Zhu, 1997, Measuring uncertainty in class assignment for natural resource
maps under fuzzy logic, Photogrammetric Engineering and Remote Sensing, 63(10),
pp 1195-1202.
3. Bastin, L., 1997, Comparison of fuzzy c-means classification, linear mixture
modelling and MLC probabilities as tools for unmixing coarse pixels, International
Journal of Remote Sensing, 18(17), pp 3629-3648.
4. Bezdek, J.C., Ehrlich, R. and Full, W., 1984, FCM: The fuzzy c-means clustering
algorithm, Computers and Geosciences, 10, pp 191-203.
5. Burrough, P.A., Van Gaans, P.F.M., and Hootsmans, R., 1997, Continuous
classification in soil survey: spatial correlation, confusion and boundaries, Geoderma,
77, pp 115-135.
6. Canters F., 1997, Evaluating the uncertainty of area estimates derived from fuzzy land
cover classification, Photogrammetric Engineering and Remote Sensing, 63(4), pp
403-414.
7. Cliff, A.D., Ord, J.K., (1973), Spatial Autocorrelation (London: Pion Limited)
8. Deer, P.J., Eklund,P., 2003, A study of parameter values for a Mahalanobis distance
fuzzy classifier, Fuzzy Sets and Systems, 137, pp 191-213.
9. Dubois, D. and Prade, H., 1987, Properties of measures of information in evidence
and possibility theories, Fuzzy Sets and Systems, 24, pp 161-182.
10. Fatemi, S.B., Mojaradi B. and Varshosaz., 2004, "Introducing an accuracy indicator
based on uncertainty related measure", XXth ISPRS Congress, Istanbul, Turkey,
Commission 4, pp 974-979.
11. Foody, G.M., 2000, Estimation of sub-pixel land cover composition in the presence of
untrained classes, Computers and Geosciences, 26, pp 469-478.
12. Foody, G.M., 2002, Status of land cover classification accuracy assessment, Remote
Sensing of Environment, 80, pp 185-201.
Assessing uncertainty in fuzzy land cover classification by confusion index
Ganesh Prasad M.S and Manoj K. Arora
International Journal of Geomatics and Geosciences
Volume 5 Issue 2, 2014 344
13. Glasziou, P. and Hilden, J., 1989, Test selection measures, Medical Decision
Making, 9, pp 133-141.
14. Heuvelink, G.B.M., (1998), Error Propagation in Environmental Modelling with GIS.
Taylor and Francis, London.
15. Jensen, J.R., (1986). Introductory Digital Image processing, Prentice-Hall, NJ.
16. Key, J.R., Maslanik, J.A., Barry, R.G., 1989, Cloud classification from satellite data
using a fuzzy sets algorithm: a polar example, International Journal of Remote
Sensing, 10(12), pp 1823-1842.
17. Kiiveri H.T., 1997, Assessing, representing and transmitting positional uncertainty in
maps, International Journal of Geographic Information Science, 11(1), pp 33-52.
18. Legleiter, C.J., Goodchild, M.F., 2005, Alternative representations of in-stream
habitat: classification using remote sensing, hydraulic modeling, and fuzzy logic,
International Journal of Geographical Information Science, 19(1), pp 29-50.
19. Lucieer, A., (2004), Parbat-a software tool for segmentation and explorative
visualization of remotely sensed imagery. URL: http://parbat.lucieer.net
20. Mark Gahegan, Manfred Ehlers, 2000, A frame work for the modelling of uncertainty
between remote sensing and geographic information systems, ISPRS Journal of
Photogrammetry and Remote Sensing, 55, pp 176-188.
21. Maselli, F., Conese, C., And Petkov, L., 1994. Use of probability entropy for the
estimation and graphical representation of the accuracy of maximum likelihood
classification, ISPRS Journal of Photogrammetry and Remote Sensing, 49, pp 13-20.
22. Ricotta, C., 2005, On possible measures for evaluating the degree of uncertainty of
fuzzy thematic maps, International Journal of Remote Sensing, 26, pp 5573-5583.
23. Shalan, M. A., Arora, M. K., and Ghosh, S. K., 2003, An evaluation of fuzzy
classifications from IRS 1C LISS III imagery : a case study, International Journal of
Remote Sensing, 24, pp 3179-3186.
24. Wu, K.L., Yang, M.S., 2002, Alternative c-means clustering algorithms, Pattern
Recognition, 35, pp 2267-2278.
25. Yang, M.S., Hwang, P.Y., Chen, D.H., 2003, Fuzzy clustering algorithms for mixed
feature variables, Fuzzy Sets and Systems, 141, pp 301-317.
26. Zadeh, L.A., 1965, Fuzzy sets, Information Control, 8, pp 338-353.
27. Zhang, J., Stuart, N., 2001, Fuzzy methods for categorical mapping with image based
land cover data, International Journal of Geographic Information Science, 15(2), pp
175-195.