Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions Automatic control and mixed sensitivity H ∞ control René Galindo Orozco FIME - UANL CINVESTAV-Monterrey, 20 de Febrero de 2008
Transcript
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
Automatic control and mixed sensitivityH∞
control
René Galindo Orozco
FIME - UANL
CINVESTAV-Monterrey, 20 de Febrero de 2008
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
Contents
1 Automatic control1 Basic notions2 Degree of mechanization3 History4 Class of systems
1 Mixed sensitivityH∞ control in anon conventional scheme
1 A mixed sensitivity problem2 Direct solutions3 Controllers4 Tuning procedure5 Benchmark of a mechanical
system6 Conclusions
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
Basic notions
Automatic control [Wikipedia]
A research area and theoretical base for mechanization andautomation , employing methods from mathematics andengineering
Theory that deals with influencing the behavior of dynamicsystems
MechanizationMachinery to assist human operators with the physicalrequirements
Automation (ancient Greek: = self dictated) [Salvatencyclopedia]Control systems for industrial machinery andprocesses, replacing human operatorsReduces the need for human sensory and mentalrequirements
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
Basic notions
Automatic control [Wikipedia]
A research area and theoretical base for mechanization andautomation , employing methods from mathematics andengineeringTheory that deals with influencing the behavior of dynamicsystems
MechanizationMachinery to assist human operators with the physicalrequirements
Automation (ancient Greek: = self dictated) [Salvatencyclopedia]Control systems for industrial machinery andprocesses, replacing human operatorsReduces the need for human sensory and mentalrequirements
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
Basic notions
Components [Wikipedia]
u (t) -
f (�)
O& O �O%#&O"
O"
-y (t)
?
d (t)
System , set of interactingentities, real or abstract,forming an integrated whole
Sensor , measure some physical stateController , manipulates u (t) to obtain the desired y (t)Actuator effect a response under the command of the controllerReference or set point , a desired y (t)
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
Controller improved by J. Watt
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
Basic notions
Control objectives1 Regulation. Ex. controller improved by Watt
limt!∞
x (t)! 0, or limt!∞
[x (t)� xd]! 0, xd 2 <
2 Tracking or servo. Ex. radar
limt!∞
x (t)! xd (t)
3 Model matching4 Input / output decoupling5 Disturbance rejection or attenuation, etc.
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
Basic notions
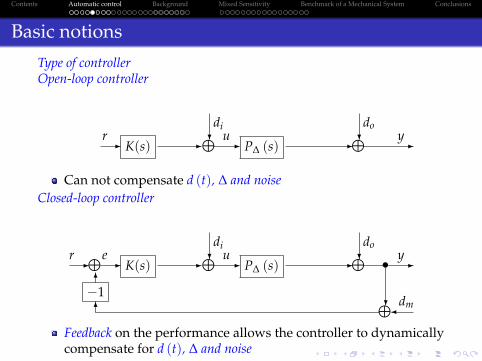
Type of controllerOpen-loop controller
-r K(s) -Ldi?u- P∆ (s) -Ldo
? -y
Can not compensate d (t), ∆ and noiseClosed-loop controller
r-L -e K(s) -Ldi?u- P∆ (s) -Ldo
? -� y
?L dm�6�16
Feedback on the performance allows the controller to dynamicallycompensate for d (t), ∆ and noise
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
Basic notions
Feedback [Wikipedia]Basic mechanism by which systems maintain their equilibrium orhomeostasis
Types of feedback
Negative, tends to reduce output,Positive, tends to increase output, orBipolar.
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
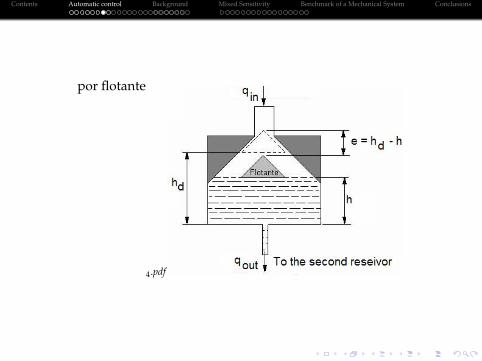
por flotante
4.pdf
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
Kalman decomposition
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
Degree of mechanization
[Salvat encyclopedia]
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
History
[Wikipedia]Ktesibios, -270 Float regulator for a water clockPhilon, -250 Keep a constant level of oil in a lampIn China, 12th cen-tury
South-pointing chariot used for navigationalpurposes
14th century Mechanical clock1588 Mill-hopper, a device which regulated the flow
of grain in a millC. Drebbel, 1624 An automatic temperature control system for a
furnaceP. de Fermat, 1600’s Minimum-time principle in opticsD. Papin, 1681 A safety valve for a pressure cookerBernoulli, 1696
Principle of Optimality in connection with theBrachistochrone Problem
T. Newcomen, 1712 Steam engineE. Lee, 1745 Fantail for a windmill
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
curve
7.jpg
t12 =R P2
P1
s1+ (y0)2
2gydx
Brachistochrone curve
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
J. Brindley, 1758 Float valve regulator in a steam boilerI.I. Polzunov, 1765 A float regulator for a steam enginePontryagin, Boltyan-sky, Gamkrelidze, andMishchenko 1962
On/off relay control as optimal control
L. Euler (1707-1783)Calculus of variations . System moves in sucha way as to minimize the time integral of thedifference between the kinetic and potentialenergies
W. Henry, 1771 Sentinel registerBonnemain, 1777 A temperature regulator suitable for indus-
trial useJ. Watt, 1788,#Industrial revolu-tion
Centrifugal flyball governor
A.-L. Breguet, 1793 A closed-loop feedback system to synchro-nize pocket watches
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
R. Delap, M. Murray, 1799 Pressure regulatorBoulton, Watt, 1803 Combined a pressure regulator with a
float regulatorI. Newton (1642-1727),G.W. Leibniz (1646-1716),brothers Bernoulli (late1600’s, early 1700’s), J.F.Riccati (1676-1754)
Infinitesimal calculus
G.B. Airy, 1840 A feedback device for pointing a tele-scope. Discuss the instability of closed-loopsystems . Analysis using differential equa-tions
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
Motivation
Robust : some property is preservedUncertainty ∆
x (t0)u (t)
�; y (t)
∆ always exists due to frequency dependent elements,unmodeled dynamics and failures
Zames in 1981 describes ∆ (s) in the frequency domain asclassical control
Infinity norm kargk∞
kargk∞ := supw
σ (arg)
kargk∞ is “good” for specifying the ∆ level and the effect ofkd (t)k2 < ∞ over ky (t)k2
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
Motivation
Robust : some property is preservedUncertainty ∆
x (t0)u (t)
�; y (t)
∆ always exists due to frequency dependent elements,unmodeled dynamics and failuresZames in 1981 describes ∆ (s) in the frequency domain asclassical control
Infinity norm kargk∞
kargk∞ := supw
σ (arg)
kargk∞ is “good” for specifying the ∆ level and the effect ofkd (t)k2 < ∞ over ky (t)k2
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
Motivation
Robust : some property is preservedUncertainty ∆
x (t0)u (t)
�; y (t)
∆ always exists due to frequency dependent elements,unmodeled dynamics and failuresZames in 1981 describes ∆ (s) in the frequency domain asclassical control
Infinity norm kargk∞
kargk∞ := supw
σ (arg)
kargk∞ is “good” for specifying the ∆ level and the effect ofkd (t)k2 < ∞ over ky (t)k2
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
Basic notions
RobustH∞ control objective
r�L�eK(s)
-
w- G (s)z-
- e∆ (s)�
?�1?
Uncertainty and kw (t)k2 attenuationin a bandwidth, over kz (t)k2,guaranteeing stability
Minimize,
J := kz (t)k2 :=�Z ∞
�∞z2 (t) dt
�1/2
For linear time invariant systems, minimizeJ := kTzew (s)k∞ := supew(t):kew(t)k2�1 σ (Tzew), or J := σ (Tzew (s))
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
D.C. Youla, H. A.Jabr, J.J. Bongiorno;1976
Explicit formula for the optimal controller basedon a least-square Wiener-Hopf minimization of acost functional
C.A. Desoer, R. Liu,J. Murray, R. Saeks;1980
Controllers placing the feedback system in a ringof operators with the prescribed properties. Theplant is modeled as a ratio of two operators in thatring
M. Vidyasagar, H.Schneider, B.A.Francis, 1982
Necessary and sufficient conditions for a giventransfer function matrix to have a coprime factor-ization . Characterization of all stabilizing compen-sators
C.N. Nett, C.A. Ja-cobson, M. J. Balas;1984
Give explicit formulas for a doubly coprime frac-tional representation of the transfer function instate-space
K. Glover, D. Mc-Farlane, 1989
An optimal stability margin. Characterizationof all controllers satisfying a suboptimal stabil-ity margin, in state-space
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
Loop-shaping
d (t), usually in w < wl
σ (P∆ (s)) " and any phase of P∆ (s), in w > wh =)worst ∆ (s) inw > wh
σ (arg) gives a measure of the “gain” of ∆ (s) or d (t)
Stabilize the system under ∆ (s) ,
σ (To (s)) # ()_σ (Lo (s)) # , in w > wh
Regulation of y (t) under d (t) ,
_σ(So (s)) # () σ (Lo (s)) " , in w < wl
9>>>>>>>>=>>>>>>>>;Loop-shaping
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
Loop-shaping
W2 (s) and W1 (s) high and low pass weightings
wl and wh depends onthe specific applicationthe knowledge of d (t) and ∆ (s)the Bode Phase-Gain Relation
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
Mixed sensitivity
r-L -e K(s) -Ldi?u- P∆ (s) -Ldo
? -� y
?L dm�6�16
Robust stabilityBy the small gain theorem if
e∆ (s) ∞< 1, stability is guaranteed if, W2 (s)Tu∆y∆ (s)
∞ < 1
Robust performancekW1 (s) So (s)k∞ < 1, minK(s) ke (t)k2
So (s) = Tdoy (s) = Ter (s) = (I+ P (s)K (s))�1 : output sensitivity
P∆ (s) : uncertain plant
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
Mixed sensitivity
Minimize
kW1 (s) So (s)k∞ and W2 (s)Tu∆y∆ (s)
∞
in the frequency range in which kd (t)k2 and k∆ (s)k∞ aresignificative by a stable K (s) designed for P (s), guaranteeing robustperformance and stability, i.e. minimize,
J1 := � W1 (s) So (s)
W2 (s)Tu∆y∆ (s)
� ∞
Uncertainty model Tu∆y∆ (s)Additive K (s) So (s)Multiplicative at the output To (s) := So (s)P (s)K (s)Feedback at the input So (s)P (s)
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
Standard solutions
General StandardH∞ Optimal Problem[Doyle, 1981], [Glover, 1984], [Francis, Doyle, 1987], [Chiang, Safonov,1997]K (s) stabilizing P (s), and minimizing, J := sup
w:kwk22�k
kz (t)k2,
J = kTzw (s)k∞
[Nett, Jacobson, Balas, 1984]Formula for the YJBK-parametrization,using static state feedback to stabilize P (s)
=) Recursiveprocedures
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
Parity interlacing property
P (s) 2 Lpxm∞ is strongly stabilizable()
the unstable poles of P (s) between every
even real and unstable zeros of P (s), is even
9=;) 9K (s) 2 RH∞
Strong stability)
8<: For loop breaking
For closed-loop bandwidth "
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
Problem
J1 is transformed into [Galindo, Malabre, Kucera, 2004]:
J2 := � Sol
Tu∆y∆h
� ∞
R (s) is fixed solving a MSP without an augmented systemSol and Tu∆y∆h becomes real matrices
J2 involves the simultaneous minimization of kSolk∞ and Tu∆y∆h
∞,
minK(s)kSolk∞
subject to kSolk∞ = Tu∆y∆h
∞
that is equivalent to minimize the Lagrange function [Galindo,Herrera, Martínez, 2000],
f := kSolk∞ � η�kSolk∞ �
Tu∆y∆h
∞
�η Lagrange multiplier
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
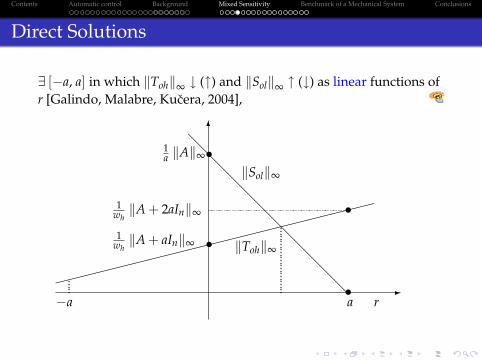
Direct solutions
[Galindo, Sanchez, Herrera, 2002]Suppose that det f(s+ a) In � R (s)g is a Hurwitz polynomial, R (s) 2 <H∞Define
X (s) = eX (s) = aIn +A 2 <H∞Y (s) = eY (s) = In 2 <H∞eNp (s) = Np (s) =
1s+ a
In 2 <H∞eDp (s) = Dp (s) =1
s+ a(sIn �A) 2 <H∞
NpD�1p =
�1
s+ a
� �1
s+ a(sIn �A)
��1
XNp + YDp = (aIn +A)�
1s+ a
�+
1s+ a
(sIn �A) = In
eNp (s), Np (s), eDp (s) and Dp (s) are of low order) lesscomputational effort
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
Direct solutions[Galindo, Sanchez, Herrera, 2002]Then, a proper stabilizing K (s) 2RH∞ is:K (s) = A+ [(s+ a) In � R (s)]�1 [(s+ a) aIn + R (s) s]
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
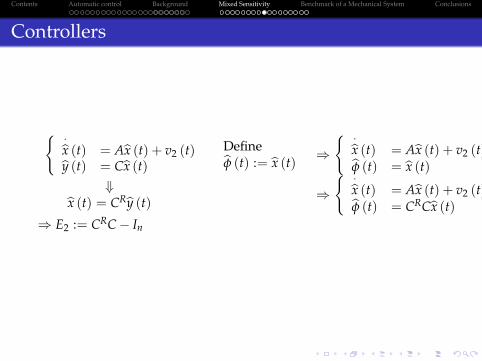
Controllers
Nominal plant P (s)
(A, B, C) a stabilizable and detectable realization of P (s) satisfyingthe parity interlacing property
A =�
A11 A12A21 A22
�B =
�0
B1
�C =
�C eC �
B1 2 <m�m non-singular
For P (s) proper, transform quadruples into and extended triples[Basile, Marro, 1992]
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
Controllers [Galindo, 2006]
exd-L e- K1(s)v1- BL -�
?
uP(s) -Ld1
? -� y
?L?
d2�6�16
L - (sIn �A)�1 Bbx� - C - �1 -L
�CR�K2(s)v2 �BL
6
bx (t) : estimated statee1 (t) : deviation from the desired state trajectory xd (t)exd (s) := Wr (s) xd (s) : filtered state reference
Satisfies the separation principleAllows to get a stableH∞ compensatorbxss = xss, lim
ri!aixss �! xdss, Toh �! 0
The class of systems depends of the observability in closed loopSome of the poles are fixed. For eC = 0, det (sIn�m �A11) must beHurwitz
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
Controllers
[Galindo, 2007]
exd-L e1- K1(s)v1-�
?
BL -uP(s) -Ld1
? -� y
?L?
d2�6�16
L- (sIn �A)�1 bx� - C - �1 -L�CRe2�K2(s)
v2
6
A simplified version of the one of [Galindo, 2006]The separation principle is not satisfiedKi (s), become PI as ri ! ai, low complexity controllersThe closed loop poles depends on the selection of the freeparameters of BL and CR, and the rest s = �ai, are stable polesSome of the poles are fixed. For eC = 0, det (sIm �A22) and forC = 0, det (sIn�m �A11) must be Hurwitz
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
Tuning procedure
Tuning Procedure [Galindo, Malabre, Kucera, 2004]For a desired time response, attenuation of kd1 (t)k2, i.e., for a given a1
1 Select a2 = a1 > 02 Find the largest free parameters of BL and CR, and the lowest wh,
satisfyinga) The stationary state error specifications,b) ri � ai (1� ai), i = 1, 2,c) and minimizing kE1 (ρ1A+ In)k∞ and k(ρ2A+ In)E2k∞
ρi :=�(ai � ri) /a2
i if ri 6= aiwl/a2
i if ri = aiwl a fixed frequency in the low frequency bandwidth of Ki (s)
3 If possible select xd 2 Im B to assure that limri!ai
bxss�! xss
4 If needed, use a pre-filter Wr (s) for the reference
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
Controllers
[Galindo, 2007]
exd�
- φ(s)?- C -L e- K2(s)CR -L- V(s) -u P(s) -
Ld1? -� y
?L d2�6�16
V (s) := σ (s)BLK1 (s) Γ�1 (s), Γ (s) := In + σ (s)K2 (s)CRC,σ (s) := s+a1�r1
(s+a1)2 , Φ (s) = sIn �A
For P∆ (s), we must satisfy also the Small Gain TheoremTu∆y∆ (s) does not depend on exd (t), indeed Tu∆y∆ (s) becomesK (s) So (s), To (s) := P (s)K (s) So (s), and So (s)P (s), whereK (s) = V (s)K2 (s)CR
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
Controllers
Assignment of part of the poles by a change of basisLet a change of basis, [Galindo, 2007]
T =�
Iq 0T21 Iq
�, T�1 =
�Iq 0�T21 Iq
�preserving the structure of B, where q � m, and
A =� eA11 eA12eA21 eA22
�be partitioned accordingly with the block partition of T. So,A = TAT�1 =" eA11 � eA12T21 eA12
T21eA11 + eA21 ��
T21eA12 + eA22
�T21 T21eA12 + eA22
#Then,
T21 = eAR12
�eA11 �Λ11
�assigns a desired dynamics Λ11 to A11, and,
T21 =�
Λ22 � eA22
� eAL12
assigns a desired dynamics Λ22 to A22
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
Mixed sensitivity
[Galindo, 2007] The norm-∞ of Tu∆y∆h is,
kKhSohk∞ = 1wh
BLD1D2CR
∞kTohk∞ = 1
w2h
CBBLD1D2CR
∞
kSohPhk∞ = 1whkCBk∞
Di := A+ (ai + ri) In, i = 1, 2.
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
Mixed sensitivity
[Galindo, Malabre, Kucera, 2004] lim
s!0limρi!0
So (s)
∞
�= wl
a2ikAk∞
Robust stability is achievedai # , but the performance is amelioratedwh " , but the high frequency bandwidth is decreased
Tuning Procedure1 Look for the highest values of ai, i = 1, 2, satisfying stability
conditions, minimizing Tu∆y∆h
∞ and satisfying plant input
specifications2 Fix the value of the free parameters of BL and CR
3 Select wh, satisfying stability conditions, stationary state errorspecifications and minimizing
Tu∆y∆h
∞
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
Benchmark of a Mechanical System
-u
m1
7�! x1(t)
kb
m2
7�! x2(t)
-d
Consider a model of a mechanical system,�x (t) = Ax (t) + Bu (t) +Ψd (t)y (t) = Cx (t)
where x (t)T :=�
x1 (t) x2 (t) x2 (t) x1 (t)�,
A =
266640 0 0 10 0 1 0
km2
�km2
�bm2
bm2
�km1
km1
bm1
�bm1
37775 , B =
2664000
1m1
3775 , Ψ =
2664001
m20
3775C =
�0 1 0 0
�
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
Benchmark of a Mechanical System
Non-collocated case,The control input acts only on one uncertainty mass 0.1 � m1 � 3and the output is the position of m2The nominal value of m1 = 1
d (t) unknown disturbancek and b the elasticity and friction coefficientsm1 and m2 the massm2 = k = b = 1
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
Benchmark of a Mechanical System
Let a := a1 = a2So, r := r1 = r2 which implies K1 (s) = K2 (s)
(A, B, C) is a minimal realization and B has the desired structureP (s) satisfies the parity interlacing propertyeC = 0, det (sIm �A22) = s+ 1 is Hurwitz
A desired dynamics Λ22 =diagf�2, � 2g, and T with q = 2 isrealized, getting,
A =
26641 1 0 11 1 1 0�1 �3 �2 0�3 �1 0 �2
3775 , B = B, C = C
det�sIm �A22
�= s+ 2 is Hurwitz
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
Benchmark of a Mechanical System
Select a = 2 and,
BL =�
g1 0 0 1�
CR =�
g2 1 0 g3�T
g1 = 1.6, g2 = 0.3, g3 = �0.55
CB = 0 =) kTohk∞ = 0 and kSohPhk∞ = 0,
wh kKhSohk∞ kKhSohk∞ kKhSohk∞with r with rb with re
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
Benchmark of a Mechanical System
Select wh = 3 rad/sec., wh = 17 rad/sec. and wh = 12 rad/sec.=) r = 1.61, rb = 1.622, and re = 1.631
with r with rb with rekE1 (ρ1A+ In)k∞ 2.067 2.052 2.042k(ρ2A+ In)E2k∞ 1.627 1.625 1.623
The characteristic polynomials det (sI�AK) of the overallcompensators are stables
Tol = �CclA�1cl Bcl =) exd (t) = (1/To2l) xd (t)
xd (t) =�
0 yd 0 0�T /2 Im B
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
Benchmark of a Mechanical System
yd = 5, under d (t) = 0.1 (sin (10t) + sin (100t))
Plant output y (t)
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
Benchmark of a Mechanical System
yd = 5, under d (t) = 0.1 (sin (10t) + sin (100t))
Plant input u (t)
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
Benchmark of a Mechanical System
x2 (t) tracks the reference signal with r, rb and re, under the d (t)and the variation of the parameter m1
d (t) remains as very small oscillations at y (t)Sinusoidal functions of frequencies over wh = 3 rad/sec.,wh = 17 rad/sec. and wh = 12 rad/sec. for r, rb and re, are wellattenuated at y (t)Bigger time response with re and less control energy, the contrarywith r, and rb in the middleSmooth control energyAs m1 ", more energy is required, and the peaks and frequencyof the oscillations decrease
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions
Conclusions
1 A methodology to design a mixed sensitivityH∞ compensatorfor a LTI MIMO plant is proposed
2 A nominal compensator is designed for the nominal plantsolving a mixed sensitivityH∞ problem, in a non-conventionalobserver-compensator scheme
3 A mixed sensitivityH∞ control law and necessary and sufficientstability conditions are given
4 Good performance guaranteeing stability, in spite of theuncertainties and of the external disturbances that are attenuated
5 The controllers with r, rb and re have good performance and theirselection depends on the desired time response and the plantinput specifications
6 An analytic or a numerical method replacing the tuningprocedure is still an open problem
Contents Automatic control Background Mixed Sensitivity Benchmark of a Mechanical System Conclusions







































































![george1/[C.7] An-Adaptive-Hinf-Control-Scheme... · AN ADAPTIVE CONTROL SCHEME FOR APPLICATION TO FLEXIBLE LINK MANIPULATORS R.D. Cashmore, G. D. Halikias and D.A. Wilson. Department](https://static.documents.pub/doc/80x56/5aea71fd7f8b9ae5318c70a0/george1c7-an-adaptive-hinf-control-schemean-adaptive-control-scheme-for-application.jpg)



