13
Available theses in robotics (November 2017) Prof. Paolo Rocco – Prof. Andrea Maria Zanchettin

Available theses in robotics (November 2017)
Prof. Paolo Rocco – Prof. Andrea Maria Zanchettin

MERLIN – Available theses in industrial robotics
Ergonomic positioning of bulky objects
Robot acts as a 3rd hand for workpiece positioning: Muscular fatigue depends on task and posture We want to identify the most ergonomic positioning of a work-object
through a robot Validation using sEMG data
Example of application: priming of car bumpers with a Comau SmartSix.
https://www.youtube.com/watch?v=lzIsMeS-_UQ
Thesis 1

MERLIN – Available theses in industrial robotics
Recognition of complex human activities
In a robotic cell it is possible to collect a variety of different observations: skeletal point positions, head orientation (with a Head Mounted Device), objects in the scene, etc.
head orientation
Skeletal point position
distance to objects
Can we use Bayesian Networks as a tool to infer which action a human is doing, according to this set of indirect observations?
Thesis 2
https://www.youtube.com/watch?v=yHK2vXf0mrk
pickingassemblinghammering

MERLIN – Available theses in industrial robotics
Prediction of human activity patterns
Human activities usually form patterns that can be inferred from previous observations.Typical methods (e.g. Markov chains) do not consider constraints such as the availability of parts, tools or space.Can we develop methods to predict the sequence of activities of the human?
Example of application: collaborative assembly with ABB YuMi robot.
https://www.youtube.com/watch?v=jNDdDvta-tw
Thesis 3

MERLIN – Available theses in industrial robotics
Scheduling of robotic activities in a human-robot collaboration context
It is possible to use Timed Petri Net to schedule robot activities in a human-robot context.
Since robot and human share a common space, the duration of a robotic activity is not deterministic (sometimes the robot has to slow down to avoid collision with human).
Is it possible to take into account variability of motion time during scheduling?
Example of application:collaborative assembly with ABB YuMi robot.
Thesis 4

MERLIN – Available theses in industrial robotics
Applications and case studies in collaborative robotics
The MERLIN Lab has been active for several years in research on human-robot interaction and collaborative robotics
A spin-off company has been recently created. It will bring a new device for human-robot collaboration to the market
Thesis 5
Theses will be available on development of case studies and applications of collaborative robotics with different robotic platforms

MERLIN – Available theses in industrial robotics
Remote handling of liquids for teleoperation applications
Topics: Robot teleoperation, force feedback, constrained control, sloshing angle perception
Teleoperation allows to control a robot from a distance
We have developed an optimization-based policy to avoid liquid spilling in autonomous tasks…
… however a human operator often has to remotely handle liquids (e.g. pharma production)
We want to join together these techniques to assist the user during remote liquid handling, and provide information via force feedback to teach him/her how to operate without assistance
Thesis 6
MERLIN – Available theses in industrial robotics
Human intention estimation from visual servoing in shared control teleoperation
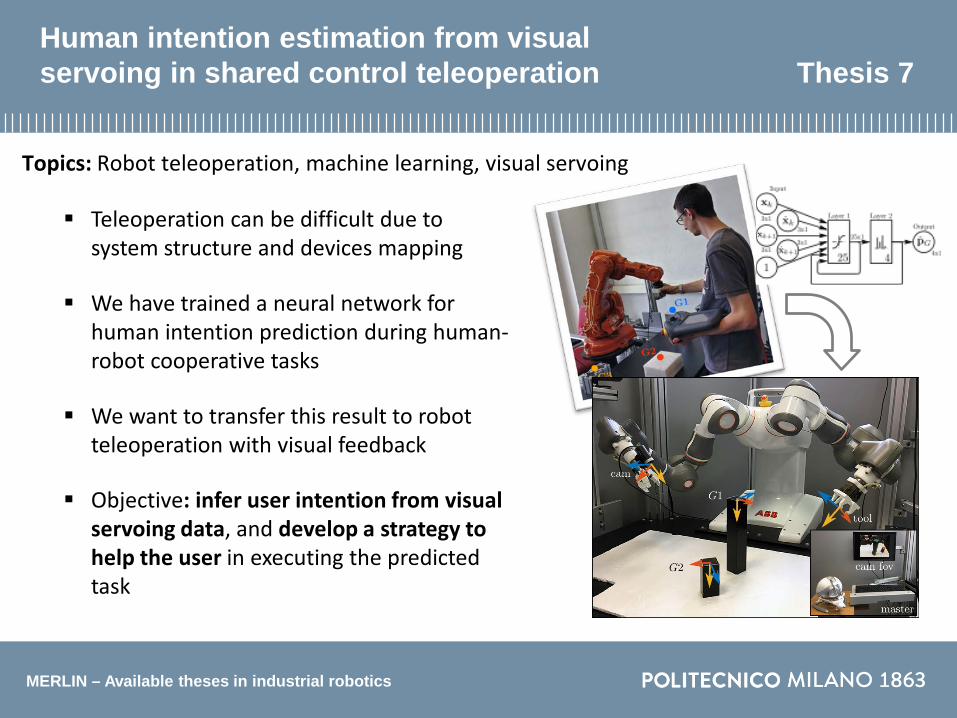
Topics: Robot teleoperation, machine learning, visual servoing
Teleoperation can be difficult due to system structure and devices mapping
We have trained a neural network for human intention prediction during human-robot cooperative tasks
We want to transfer this result to robot teleoperation with visual feedback
Objective: infer user intention from visual servoing data, and develop a strategy to help the user in executing the predicted task
Thesis 7

MERLIN – Available theses in industrial robotics
Remote robot manipulation task with visual and force feedback
Topics: Robot teleoperation, visual servoing, interaction control, virtual fixtures
We have developed a visual servoedteleoperation system for a reaching task in presence of camera occlusions…
… and a level control law that guarantees stability during interaction with the environment
Objective: couple the two controllers together to perform a remote manipulation task with both visual and force feedback, from the environment and virtual motion constraints
Thesis 8

MERLIN – Available theses in industrial robotics
Modelling and control of a hydraulically actuated mechanism
Hydraulic actuators are used in several machines where large forces are needed
Control of a hydraulically actuated mechanism entails interesting problems related with resonances and nonlinearities
Objective: to study advanced, model-based, control schemes for these systems and to validate them on a test bench in the framework of a collaboration with a company
Thesis 9

MERLIN – Available theses in industrial robotics
Modelling and control of a hydraulically actuated machine
Hydraulically actuated machines are characterized by closed-chains, highly nonlinear dynamics, resonant behaviours
A mechatronic model of a machine has been developed that can serve to offline test innovative control laws
Objective: to study advanced, model-based, control schemes for an articulated machine with hydraulic actuators and to validate them on a real machine in the framework of a collaboration with a company
Thesis 10
Koivumäki and Mattila, 2016

MERLIN – Available theses in industrial robotics
Aerial manipulation Thesis 11
An aerial robotic manipulator is a system composed of a quadrotor equipped with a robotic arm.
Several control problems arise related to the coupling of the two systems
A prototype has been made at MERLIN
We want to perform experiments on the prototype

MERLIN – Available theses in industrial robotics
Additive manufacturing (3D printing) is one of the most fast-growing technologies for the factory of the future
Industrial robots can serve as dexterous 3D printers
Application on a COMAU RACER robot
Atropos +LAB POLIMI
Industrial robotics for the additive manufacturing Thesis 12
Collaborazione con un altro Dipartimento del Politecnico

















