Autor: David Serrano Martínez 01/12/2001 1 de 37 PRINCIPIOS TEÓRICOS DEL FUNCIONAMIENTO DE LA BALANZA CENTROSCÓPICA DE SIMPLE EJE ÍNDICE 1. INTRODUCCIÓN .................................................................................................... 2 1.1 OBJETO.......................................................................................................... 2 1.2 ALCANCE ....................................................................................................... 2 2. DOCUMENTACIÓN DE REFERENCIA.................................................................. 2 3. DESCRIPCIÓN DE LA BALANZA CENTROSCÓPICA SCHENCK WM-1............. 3 4. TEORÍA DEL CÁLCULO DE ERRORES DE MEDIDA ........................................... 4 5. PROCEDIMIENTO GENERAL DE MEDIDA .......................................................... 7 6. FUNCIONAMIENTO DE LA CÉLULA DE CARGA ............................................... 15 7. OTROS PROCEDIMIENTOS DE MEDIDA .......................................................... 18 8. ESTIMACIÓN DE LA CONSTANTE K DE LA BALANZA ..................................... 21 9. APLICACIONES PRÁCTICAS .............................................................................. 24 9.1 MEDIDA EN HORIZONTAL DE LA POSICIÓN DEL C.D.M......................... 24 9.2 MEDIDA EN VERTICAL DE LA EXCENTRICIDAD DEL C.D.M................... 27 9.3 MEDIDA EN HORIZONTAL DE LA EXCENTRICIDAD DEL C.D.M. ........... 30
Transcript
Autor: David Serrano Martínez 01/12/2001
1 de 37
PRINCIPIOS TEÓRICOS DEL FUNCIONAMIENTO DE LA BALANZA CENTROSCÓPICA DE SIMPLE EJE
2. DOCUMENTACIÓN DE REFERENCIA.................................................................. 2 3. DESCRIPCIÓN DE LA BALANZA CENTROSCÓPICA SCHENCK WM-1............. 3 4. TEORÍA DEL CÁLCULO DE ERRORES DE MEDIDA........................................... 4 5. PROCEDIMIENTO GENERAL DE MEDIDA .......................................................... 7 6. FUNCIONAMIENTO DE LA CÉLULA DE CARGA............................................... 15 7. OTROS PROCEDIMIENTOS DE MEDIDA .......................................................... 18 8. ESTIMACIÓN DE LA CONSTANTE K DE LA BALANZA..................................... 21 9. APLICACIONES PRÁCTICAS.............................................................................. 24
9.1 MEDIDA EN HORIZONTAL DE LA POSICIÓN DEL C.D.M......................... 24 9.2 MEDIDA EN VERTICAL DE LA EXCENTRICIDAD DEL C.D.M................... 27 9.3 MEDIDA EN HORIZONTAL DE LA EXCENTRICIDAD DEL C.D.M. ........... 30
Autor: David Serrano Martínez 01/12/2001
2 de 37
1. INTRODUCCIÓN
1.1 OBJETO
El objeto del presente documento es explicar la base teórica en que descansan los
procedimientos de medida con la balanza centroscópica Schenck WM-1. Se detallará la
teoría de la medición y el cálculo de errores para los procedimientos generales de medida
con dicha balanza.
Como punto de partida haremos una sucinta descripción de la balanza
centroscópica y de su principio de funcionamiento. Asimismo expondremos los
fundamentos del cálculo de errores ya que éste se usará a lo largo de todo el texto.
1.2 ALCANCE
Los procedimientos que se describen en este documento sólo alcanzan a la medición con
máquinas de eje simple. No obstante las máquinas de eje doble pueden usarse como si
fueran de eje simple, por lo que para este caso les son aplicables los procedimientos
descritos.
2. DOCUMENTACIÓN DE REFERENCIA
Para la realización de este documento se ha usado la siguiente referencia:
• Especificaciones técnicas de la balanza centroscópica Schenck WM-1.
Autor: David Serrano Martínez 01/12/2001
3 de 37
3. DESCRIPCIÓN DE LA BALANZA CENTROSCÓPICA SCHENCK WM-1
(Figura 1)
En esencia, la balanza centroscópica consta de una palanca dotada de un plato
giratorio donde se coloca el objeto a medir. El momento que el peso P de dicho objeto
genera respecto del eje de apoyo de la palanca (el cual es perpendicular al plano de la
figura 1 y pasa por O) se ve equilibrado por medio de la fuerza C que una célula de
carga (simbolizada por el resorte de la figura 1) ejerce sobre la palanca. Dicha célula de
carga envía una señal eléctrica a una unidad de visualización o display.
La balanza dispone así mismo de una bandeja portapesas. Ésta es útil en
ocasiones, ya que si se dispone sobre el plato un objeto muy pesado, podemos colocar
en la bandeja un peso W conocido que contrarreste el momento generado por P, y así
evitaremos dañar la célula de carga.
Por último cabe reseñar que la palanca dispone de un peso roscado con el que se
puede mover el c.d.m. de la misma y puede usarse para ajustar el cero del display.
CW
P
+9999
O
Peso
Autor: David Serrano Martínez 01/12/2001
4 de 37
4. TEORÍA DEL CÁLCULO DE ERRORES DE MEDIDA
Supongamos que queremos determinar el valor de una magnitud y que depende
funcionalmente de n magnitudes x1, x2,... , xn, de la forma:
( )nxxxfy ,...,, 21= [1]
Para cada magnitud xi, sea xi* su verdadero valor (que será para nosotros
desconocido). Se sabe, no obstante, que éste estará dentro de un intervalo de
incertidumbre, expresado de la forma:
[ ]ieii
eii xxxxx Δ+Δ−∈ ,* ; 0≥Δ ix [2]
En la expresión anterior eix es el punto medio del intervalo, y será considerado
como la medida de la magnitud xi.
El valor ixΔ se denominará incertidumbre en la medida de xi. Definiremos a
continuación e(xi) como la diferencia entre el verdadero valor de xi y su medida. Lo
llamaremos error en la medida de xi.
( ) eiii xxxe −= * [3]
(Figura 2)
e(xi)
Δxi
xie xi*
Autor: David Serrano Martínez 01/12/2001
5 de 37
El verdadero valor de y vendrá dado por:
( )**,...,*,* 21 nxxxfy = [4]
Asimismo el valor que adoptaremos como medida de y será:
( )en
eee xxxfy ,...,, 21= [5]
El error en la determinación de y vendrá dado entonces por:
( ) ( ) ( )en
een
e xxxfxxxfyyye ,...,,**,...,*,* 2121 −=−= [6]
Esto se puede escribir de la forma:
( ) ( ) ( ) ( )( ) ( )en
een
en
ee xxxfxexxexxexfye ,...,,,...,, 212211 −+++= [7]
Si los e(xi) son pequeños y la función f es diferenciable, podemos aproximar el
incremento en la función f por su diferencial, de la forma:
( ) ( )i
n
ixxxi
xexfye
en
ee
⋅⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
≅∑=1
,..., 21
[8]
Para cada magnitud xi podemos establecer las desigualdades:
( ) iii xxex Δ≤≤Δ− [9]
Llamemos yΔ a:
i
n
ixxxi
xxfy
en
ee
Δ⋅⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
=Δ ∑=1
,..., 21
[10]
Autor: David Serrano Martínez 01/12/2001
6 de 37
Podemos escribir, por tanto:
( ) yyey Δ≤≤Δ− [11]
Si sumamos ey a cada término de la desigualdad, resulta:
( ) yyyeyyy eee Δ+≤+≤Δ− [12]
Es decir:
yyyyy ee Δ+≤≤Δ− * [13]
Hemos llegado por tanto una acotación para el verdadero valor de y.
Podemos escribir, a modo de resumen, las siguientes cuatro expresiones:
RESUMEN DE EXPRESIONES PARA LA MEDIDA Y CÁLCULO DE ERRORES
• Función de medida de y a partir de x1, x2, ... , xn: ( )nxxxfy ,...,, 21=
• Valor medido de y: ( )en
eee xxxfy ,...,, 21=
• Incertidumbre en la medida de y: i
n
ixxxi
xxfy
en
ee
Δ⋅⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
=Δ ∑=1
,..., 21
• Acotación de la incertidumbre de y: yyyyy ee Δ+≤≤Δ− *
Autor: David Serrano Martínez 01/12/2001
7 de 37
5. PROCEDIMIENTO GENERAL DE MEDIDA
(Figura 3)
En la figura 3 se dispone un esquema de la balanza en planta. Se supondrá que la
máquina está perfectamente nivelada, de manera que la vertical es perpendicular al
plano de la figura 3. El sistema de ejes {O,x,y} es solidario a la palanca de la balanza.
Por otra parte el sistema {O,X,Y} es solidario al plato giratorio. Entre ambos sistemas
mediará un ángulo α. Se definen a continuación los siguientes puntos, fuerzas y pares:
• OW: es el punto intersección de la línea de acción del peso W colocado en la
bandeja portapesas con el plano de la figura 3. El par que genera dicho peso
sobre el eje y será rW⋅W.
• OC: es el punto intersección de la línea de acción de la fuerza C que ejerce la
célula de carga con el plano de la figura 3. Al par que genera dicha fuerza
sobre el eje y lo denominaremos M.
• OQ: es el punto intersección de la línea de acción del peso Q del conjunto
palanca + plato giratorio + bandeja portapesas, (considerando Q aplicado en el
c.d.m. de dicho conjunto) con el plano de la figura 3. A par que genera dicho
peso sobre el eje y lo llamaremos MQ.
OC OQ
OP
rα
x
y
OWβ
X
Y
rW
O
Autor: David Serrano Martínez 01/12/2001
8 de 37
• OP: es el punto de intersección de la línea de acción del peso P del objeto
colocado sobre el plato giratorio (considerando P aplicado en el c.d.m. de
dicho objeto) con el plano de la figura 3.
El criterio de signos usado se recoge en la siguiente tabla. Éste está referido a la
figura 1.
Signo
Magnitud Positivo Negativo
Fuerza Hacia abajo Hacia arriba
Brazo de fuerza De derecha a izquierda De izquierda a derecha
Momento Sentido horario Sentido antihorario
(Tabla 1)
El objeto de la medida es determinar los valores de r y β, representados en la
figura 3. La ecuación de equilibrio de la balanza se puede escribir como:
( ) 0cos =++++ PrMMWr QW βα [14]
Definamos los siguientes términos:
βcosrrX = [15]
βsinrrY = [16]
Si desarrollamos el coseno de la expresión [14], y usamos las definiciones [15] y
[16], la ecuación de equilibrio de la balanza se transforma en:
0sincos =−+++ αα PrPrMMWr YXQW [17]
Podemos observar que hemos cambiado las incógnitas r y β por las nuevas rX y rY.
A partir de ahora trabajaremos con la expresión [17], lo cual facilitará mucho los
cálculos.
Autor: David Serrano Martínez 01/12/2001
9 de 37
Si a continuación giramos el plato en cuatro ángulos distintos obtendremos cuatro
lecturas del momento M.
0sincos =−+++ iYiXQiW PrPrMMWr αα ; i = 1,2,3,4. [18]
Si restamos la ecuación de equilibrio correspondiente a α2 de la correspondiente a
α1 y hacemos lo propio con las ecuaciones correspondientes a α3 y α4 obtenemos las
dos siguientes ecuaciones que nos permitirán calcular los valores de rX y rY.
Calcularemos a continuación todas las derivadas parciales de las funciones f y g,
las cuales serán usadas posteriormente. Se particularizarán dichas derivadas en los
valores medidos, que recordamos son:
eP , 01 =eα , πα =e
2 , 23πα =e ,
43
4πα =e , eM1 , eM 2 , eM 3 , eM 4
Presentamos los resultados de dichos cálculos en las siguientes dos tablas:
Derivada Valor Particularización
Xrf
∂∂ ( )21 coscos αα −P eP2
Yrf
∂∂ ( )21 sinsin αα −− P 0
1Mf
∂∂
1 1
2Mf
∂∂
-1 -1
1α∂∂f 11 cossin αα PrPr YX −− ee
Y Pr−
2α∂∂f 22 cossin αα PrPr YX + ee
Y Pr−
Pf
∂∂ ( ) ( )2121 sinsincoscos αααα −−− YX rr e
Xr2
(Tabla 2)
Autor: David Serrano Martínez 01/12/2001
11 de 37
Derivada Valor Particularización
Xrg
∂∂ ( )43 coscos αα −P 0
Yrg
∂∂ ( )43 sinsin αα −− P eP2−
3Mg
∂∂
1 1
4Mg
∂∂
-1 -1
3α∂∂g 33 cossin αα PrPr YX −− ee
X Pr−
4α∂∂g 44 cossin αα PrPr YX + ee
X Pr−
Pg∂∂ ( ) ( )4343 sinsincoscos αααα −−− YX rr e
Yr2−
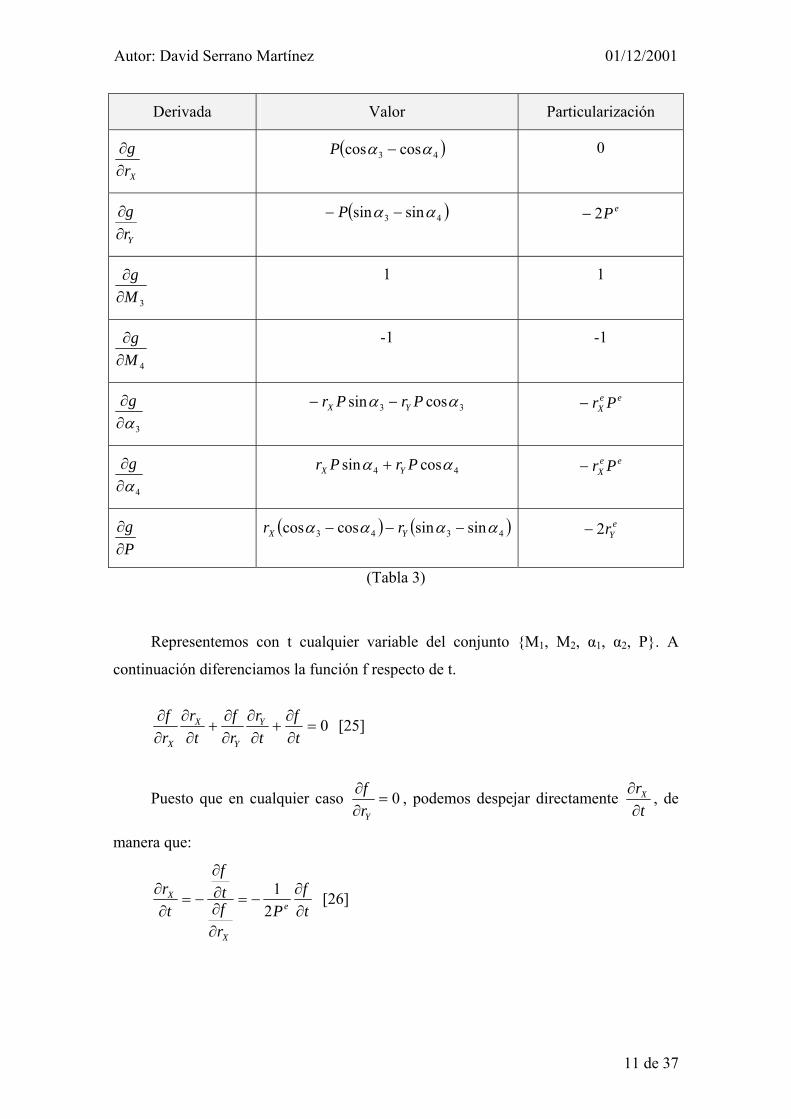
(Tabla 3)
Representemos con t cualquier variable del conjunto {M1, M2, α1, α2, P}. A
continuación diferenciamos la función f respecto de t.
0=∂∂
+∂∂
∂∂
+∂∂
∂∂
tf
tr
rf
tr
rf Y
Y
X
X
[25]
Puesto que en cualquier caso 0=∂∂
Yrf , podemos despejar directamente
trX
∂∂ , de
manera que:
tf
Prftf
tr
e
X
X
∂∂
−=
∂∂∂∂
−=∂∂
21 [26]
Autor: David Serrano Martínez 01/12/2001
12 de 37
De forma análoga representemos con t cualquier variable independiente del
conjunto {M3, M4, α3, α4, P}. A continuación diferenciamos la función g respecto de t.
0=∂∂
+∂∂
∂∂
+∂∂
∂∂
tg
tr
rg
tr
rg Y
Y
X
X
[27]
Puesto que en cualquier caso 0=∂∂
Xrg , podemos despejar directamente
trY∂∂ , de
manera que:
tg
Prgtg
tr
e
Y
Y
∂∂
=
∂∂∂∂
−=∂∂
21 [28]
Los resultados de los cálculos según las expresiones [26] y [28] se exponen en la
tabla a continuación:
eX
PMr
21
1
−=∂∂ e
Y
PMr
21
3
=∂∂
eX
PMr
21
2
=∂∂ e
Y
PMr
21
4
−=∂∂
21
eYX rr
=∂∂α
23
eXY rr
−=∂∂α
22
eYX rr
=∂∂α
24
eXY rr
−=∂∂α
e
eXX
Pr
Pr
−=∂∂ e
eYY
Pr
Pr
−=∂∂
(Tabla 4)
Autor: David Serrano Martínez 01/12/2001
13 de 37
A continuación supondremos que la incertidumbre máxima en la medidas de los
pares Mi de la célula de carga es siempre la misma, y la notaremos como ΔM. De igual
manera supondremos que la incertidumbre máxima en el posicionamiento de los
ángulos αi del plato es siempre la misma, y la notaremos como Δα. Las incertidumbres
en la medida de rX y rY se pueden escribir como:
PPrrrM
MrM
Mrr XXXXX
X Δ∂∂
+Δ∂∂
+Δ∂∂
+Δ∂∂
+Δ∂∂
≅Δ αα
αα 2121
[29]
PPrrrM
MrM
Mrr YYYYY
Y Δ∂∂
+Δ∂∂
+Δ∂∂
+Δ∂∂
+Δ∂∂
≅Δ αα
αα 4343
[30]
Si usamos los resultados de la tabla 4 junto con las expresiones [29] y [30],
obtenemos:
PPr
rPMr e
eXe
YeX Δ+Δ+Δ
≅Δ α [31]
PPr
rPMr e
eYe
XeY Δ+Δ+Δ
≅Δ α [32]
En la siguiente tabla presentamos un resumen de las expresiones para el
procedimiento general de medida:
Incógnitas rX rY
Medida e
eeeX P
MMr2
21 −−= e
eee
Y PMMr
243 −=
Incertidumbre P
Pr
rPMr e
eXe
YeX Δ+Δ+Δ
≅Δ α PPr
rPMr e
eYe
XeY Δ+Δ+Δ
≅Δ α
Intervalo de
incertidumbre X
eXXX
eX rrrrr Δ+≤≤Δ− * Y
eYYY
eY rrrrr Δ+≤≤Δ− *
(Tabla 5)
Autor: David Serrano Martínez 01/12/2001
14 de 37
A partir de la medida de rX y rY podemos obtener r, de la forma:
22YX rrr += [33]
El valor medido de r será:
22 eY
eX
e rrr += [34]
La incertidumbre en la medida de r se calculará de la forma:
Ye
eY
Xe
eX r
rr
rrr
r Δ+Δ≅Δ [35]
El intervalo de incertidumbre lo expresaremos de la forma:
rrrrr ee Δ+≤≤Δ− *},0max{ [36]
Para concluir debemos señalar que, como se puede comprobar en la tabla 5, la
calidad de la medida se ve afectada por la indeterminación Δα de los ángulos αi. Si el
plato de la balanza dispone de cuatro posiciones de anclaje en los ángulos: 01 =eα ,
πα =e2 ;
23πα =e y
43
4πα =e , a efectos prácticos podemos considerar el error debido a
Δα despreciable frente al resto de los sumandos.
Las expresiones escritas en la tabla 5 aún no son muy útiles porque la célula de
carga no ofrece directamente el valor del par M. Desconocemos así mismo la
incertidumbre ΔM de este valor. Solventaremos este problema en el siguiente apartado.
Autor: David Serrano Martínez 01/12/2001
15 de 37
6. FUNCIONAMIENTO DE LA CÉLULA DE CARGA
La célula de carga puede trabajar a tracción y a compresión. Ésta envía una señal
eléctrica de voltaje proporcional al par M de la fuerza C que la célula ejerce sobre la
palanca. Este voltaje se traduce en un número entero en sobre el display de la unidad de
control de la máquina. Si la fuerza C es hacia arriba (C negativa y M positivo), la célula
trabaja a compresión y la lectura en será negativa. Si la fuerza C es hacia abajo (C
positiva y M negativo), la célula trabaja a tracción y la lectura en será positiva.
La relación entre en y M, que denominaremos f(M) no es, en general, una función
lineal. Además no será una función inyectiva, ya que, debido a efectos de histéresis,
f(M) no valdrá lo mismo si se ha llegado a un valor M desde valores de par menores,
que si se ha llegado a M desde valores de par mayores. No obstante, dicha curva f(M)
podrá incluirse, en todo el dominio de M, dentro de una banda lineal, como puede verse
en la figura 4.
(Figura 4)
M
n
Δn
ΔM
bMK
n +⋅=1
Autor: David Serrano Martínez 01/12/2001
16 de 37
Así pues, bajo buenas condiciones de funcionamiento el fabricante nos garantiza
que si obtenemos una lectura en en el display, el verdadero valor M* del momento que
la célula de carga ejerce sobre la palanca estará acotado de la siguiente forma:
( ) ( ) MbnKMMbnK ee Δ+−≤≤Δ−− * [37]
En la expresión anterior K es una constante de escala, siendo K<0. Por otra parte
b es una constante de posición y MΔ corresponde a la incertidumbre en la medida de
momentos.
De manera equivalente podemos decir que si M* es el verdadero valor del
momento que la célula de carga ejerce sobre la palanca, la lectura en del display estará
dentro del siguiente intervalo:
nbMK
nnbMK
e Δ++≤≤Δ−+ *1*1 [38]
En la expresión [38] el valor nΔ corresponde a la incertidumbre de medida en la
unidad de visualización. Los valores de K, MΔ y nΔ están relacionados mediante la
siguiente expresión:
nMKΔΔ
−= [39]
En la expresión [39] vemos que K representa la sensibilidad de medición de la
balanza. Como se podrá observar en las tablas 6, 7 y 8, no es necesario conocer el valor
de b para operar con la balanza, pero sí necesitaremos conocer la pareja de valores K y
MΔ (o sus equivalentes K y nΔ ), los cuales nos los ha de suministrar el fabricante de
la máquina.
Autor: David Serrano Martínez 01/12/2001
17 de 37
Como medida del momento M tomaremos el punto medio del intervalo [37], esto
es:
( )bnKM ee −= [40]
El análisis presentado desde la expresión [37] hasta la expresión [40] no es exacto,
pues hemos dicho que el display de la máquina sólo presenta números enteros y
nosotros hemos hecho los cálculos suponiendo que fueran números reales. No obstante
un estudio con números enteros es más complicado y no ofrece resultados
significativamente diferentes a los dados.
Si usamos las expresión [40], los resultados de la tabla 5 los podemos presentar de
esta forma:
Incógnitas rX rY
Medida 2
21ee
eeX
nnPKr −
−= 2
43ee
ee
Ynn
PKr −
=
Incertidumbre P
Pr
rPMr e
eXe
YeX Δ+Δ+Δ
≅Δ α PPr
rPMr e
eYe
XeY Δ+Δ+Δ
≅Δ α
Intervalo de
incertidumbre X
eXXX
eX rrrrr Δ+≤≤Δ− * Y
eYYY
eY rrrrr Δ+≤≤Δ− *
(Tabla 6)
Autor: David Serrano Martínez 01/12/2001
18 de 37
7. OTROS PROCEDIMIENTOS DE MEDIDA
Seguidamente explicaremos de manera sucinta otros procedimientos, más
simplificados pero en ocasiones menos formales, para la medida de las variables rX , rY
y r.
Para la medida de rX podemos disponer, sin haber apoyado aún el cuerpo objeto
de medición sobre la balanza, el eje X del plato giratorio en la posición 01 =eα . La
ecuación de equilibrio de la máquina en estas condiciones será:
00 =++ QW MMWr [41]
A continuación, y sin cambiar la orientación del eje X del plato, cargamos sobre el
mismo el cuerpo de peso P objeto de medición. La ecuación de equilibrio será ahora:
0sincos 111 =−+++ αα PrPrMMWr YXQW [42]
Si restamos la ecuación [41] de la ecuación [42] resulta:
0sincos 1101 =−+− αα PrPrMM YX [43]
Si lo que queremos es determinar rY, seguiremos los dos pasos anteriores, con la
diferencia de que el eje X lo colocaremos en un ángulo 23πα =e , llegándose a la
siguiente ecuación:
0sincos 3303 =−+− αα PrPrMM YX [44]
Si seguimos la metodología de cálculo aplicada en las secciones anteriores para la
determinación de los errores de cálculo, llegamos a los resultados que se exponen en la
siguiente tabla resumen:
Autor: David Serrano Martínez 01/12/2001
19 de 37
Incógnitas rX rY
Medida ( )eee
eX nn
PKr 01 −−= ( )ee
ee
Y nnPKr 03 −=
Incertidumbre P
Pr
rPMr e
eXe
YeX Δ+Δ+Δ
≅Δ α2 PPr
rPMr e
eYe
XeY Δ+Δ+Δ
≅Δ α2
Intervalo de
incertidumbre X
eXXX
eX rrrrr Δ+≤≤Δ− * Y
eYYY
eY rrrrr Δ+≤≤Δ− *
(Tabla 7)
Podemos observar que si bien este método es un poco más rápido que el anterior,
también ofrece una calidad de medida algo inferior.
A continuación presentaremos un procedimiento no formal de medida de r cuya
ventaja es que no requiere determinar previamente rX y rY. Es por tanto un
procedimiento más rápido que los anteriores. Para empezar definiremos el ángulo θ
como:
βαθ += [45]
La ecuación [14] se puede escribir entonces de la forma siguiente:
0cos =+++ θrPMMWr QW [46]
Tomaremos dos medidas en sendas orientaciones del plato, que denominaremos
θM y θm, de manera que θM se corresponda con la lectura nM máxima algebraica
(teniendo en cuenta el signo) visualizada en el display y θm se corresponda con la
lectura nm mínima algebraica visualizada en el display, al hacer girar el plato de la
balanza. Sea MM el par correspondiente a la lectura nM y Mm el par correspondiente a la
lectura nm. Las dos ecuaciones de equilibrio son:
0cos =+++ MQMW rPMMWr θ [47]
Autor: David Serrano Martínez 01/12/2001
20 de 37
0cos =+++ mQmW rPMMWr θ [48]
Si restamos [47] – [48] llegamos a la expresión:
( ) 0coscos =−+− mMmM rPMM θθ [49]
Como podemos observar, este método no es formal por cuanto que no podemos
medir los ángulos θM y θm. No obstante es evidente que eMn y e
MM se alcanzarán para
un ángulo θM en el entorno de 0, por lo que asumiremos: 0=eMθ , mientras que e
mn y
emM se alcanzarán para un ángulo θm en el entorno de π, por lo que asumiremos:
πθ =em .
Partiendo de la expresión [49], de las consideraciones realizadas, y aplicando la
teoría de errores llegamos a las expresiones para la medida e incertidumbre que se
resumen en la tabla siguiente:
Incógnita r
Medida 2
em
eM
ee nn
PKr −
−=
Incertidumbre P
Pr
PMr e
e
e Δ+Δ
≅Δ
Intervalo de
incertidumbre rrrrrmáx ee Δ+≤≤Δ− *},0{
(Tabla 8)
Podría pensar el lector que, pese a la no formalidad de este método de medición,
ofrece una acotación bastante precisa del error, ya que, como se puede observar en la
tabla 8, la incertidumbre consta tan sólo de dos sumandos en lugar de los tres sumandos
que aparecen en las tablas 6 y 7.
Autor: David Serrano Martínez 01/12/2001
21 de 37
Las verdaderas expresiones para la medida de r y su incertidumbre son
respectivamente las fórmulas [50] y [51] que se detallan a continuación. Dichas
expresiones se simplifican en las mostradas en la tabla 8 al sustituir los valores
supuestos 0=eMθ y πθ =e
m . Si pudiéramos dar sendas medidas de Mθ y mθ ,
seguramente diferirían en algo de los valores supuestos, y por ende llegaríamos a una
medida de r diferente y a un intervalo de incertidumbre mayor.
em
eM
em
eM
ee nn
PKr
θθ coscos −−
−= [50]
( ) θθθ
θθ
θθΔ
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−
++Δ+Δ
−−≅Δ e
em
eM
em
eM
e
e
em
eM
e rPPrn
PKr
coscossinsin
coscos2 [51]
8. ESTIMACIÓN DE LA CONSTANTE K DE LA BALANZA
Ya hemos señalado en el apartado 6 del presente documento que para poder
operar con la balanza centroscópica debemos conocer la pareja de valores K y MΔ (o
sus equivalentes K y nΔ ). Dichos valores nos los debe suministrar el fabricante de la
máquina.
El presente apartado explica un procedimiento para estimar el valor de la
constante K en caso de que no se conozca.
Pongamos un peso W1 sobre la bandeja portapesas de la balanza. La ecuación de
la balanza [14] se escribirá en este caso:
( ) 0cos11 =++++ PrMMWr QW βα [52]
Retiremos el peso W1 y en su lugar coloquemos un peso W2 (siendo W2>>W1). La
ecuación de la balanza será ahora:
( ) 0cos22 =++++ PrMMWr QW βα [53]
Autor: David Serrano Martínez 01/12/2001
22 de 37
Si operamos [53] - [52] tendremos:
( ) 01212 =−+− MMWWrW [54]
Definamos la magnitud X como:
12 MMX −= [55]
Usando esta definición, la expresión [54] se puede escribir de la forma:
( )12 WWrX W −−= [56]
En la tabla siguiente se presentan la medida de X y su incertidumbre:
Incógnita X
Medida ( )eeeW
e WWrX 12 −−=
Incertidumbre WrrWWX eWW
ee Δ+Δ−=Δ 212
Intervalo de
incertidumbre XXXXX ee Δ+≤≤Δ− *
(Tabla 9)
En la expresión para la incertidumbre hemos supuesto que los dos pesos presentan
la misma, esto es: WΔ .
Por otra parte, al colocar el peso W1 habremos obtenido una lectura del display en1 , mientras que al colocar el el peso W2 la lectura del display habrá sido en2 . Si
combinamos las expresiones [37] y [39] podemos escribir:
( ) ( )nbnKMnbnK ee Δ−−≤≤Δ+− 111 * [57]
Autor: David Serrano Martínez 01/12/2001
23 de 37
( ) ( )nbnKMnbnK ee Δ−−≤≤Δ+− 222 * [58]
Hemos impuesto la condición W2>>W1 para asegurar que los intervalos [57] y
[58] sean disjuntos. Por otra parte el correspondiente a *2M está más a la derecha en la
recta real que el otro. A partir de estos dos intervalos y usando la relación [55]
escribiremos:
( ) ( )nnnKXnnnK eeee Δ−−≤≤Δ+− 2*2 1212 [59]
Para que el intervalo presentado en la tabla 9 y el presentado en la expresión [59]
tengan intersección no nula deben cumplirse las siguiente condiciones:
( ) ( )nnnKWrrWWWWr eeeWW
eeeeeW Δ+−≥Δ+Δ−+−− 22 121212 [60]
( ) ( )nnnKWrrWWWWr eeeWW
eeeeeW Δ−−≤Δ−Δ−−−− 22 121212 [61]
Las expresiones [60] y [61] acotan el valor de K de la siguiente manera:
( ) ( )nnn
WrrWWWWrK
nnnWrrWWWWr
ee
eWW
eeeeeW
ee
eWW
eeeeeW
Δ−−
Δ−Δ−−−−≤≤
Δ+−
Δ+Δ−+−−
22
22
12
1212
12
1212
[62]
A la vista del intervalo anterior, como estimación de K podemos tomar:
ee
eee
W nnWWrK
12
12
−−
−≅ [63]
Podemos usar esta estimación de K en los cálculos, pero ya no podremos
garantizar completamente la validez de los intervalos de acotación expresados en los
distintos métodos explicados.
Autor: David Serrano Martínez 01/12/2001
24 de 37
9. APLICACIONES PRÁCTICAS
Una vez conocidos los procedimientos generales de medición con la balanza
centroscópica, describiremos a continuación una serie de métodos específicos para la
determinación de la posición del c.d.m. de un cuerpo. Nos centraremos sobre todo en los
cuerpos de revolución, en los que podemos definir el concepto de excentricidad del c.d.m.
como la distancia del c.d.m. al eje de simetría del cuerpo. Éste eje es, por definición, el eje
entre puntos del torno con el que fue mecanizado dicho cuerpo.
9.1 MEDIDA EN HORIZONTAL DE LA POSICIÓN DEL C.D.M.
(Figura 5)
x
y
X
Y
a
b
c
GS’GT’G’
O
δ
l
d
α
θ
A1
Autor: David Serrano Martínez 01/12/2001
25 de 37
Se dispone del objeto a medir (pieza naranja de la figura 5) sobre un soporte y se
apoya contra el tope del mismo. Se explica a continuación la nomenclatura que se usará
en el desarrollo de este procedimiento de medida:
• G’: proyección sobre el plato de la balanza del c.d.m. del objeto a medir (pieza
naranja) .
• GS’: proyección sobre el plato de la balanza del c.d.m. del soporte.
• GT’: proyección sobre el plato de la balanza del c.d.m. de los dos cuerpos
anteriores.
• P: peso del cuerpo a medir.
• S: peso del soporte.
El objeto del procedimiento es medir δ.
Observando la figura 5 podemos escribir:
)( PSbcPaS +=+ [64]
Si despejamos c obtendremos:
PaSPSbc −+
=)( [65]
Por otra parte se cumple la relación:
θθδθ
coscostan ldc =+− [66]
La magnitud d que aparece en la expresión [66] tiene signo. Éste es positivo si su
sentido coincide con el representado en la figura 5. Si despejamos δ resulta:
θθδ sincos dcl +−= [67]
Autor: David Serrano Martínez 01/12/2001
26 de 37
La medición de a y b se hará por alguno de los métodos ya explicados en la
primera parte de este documento. El montaje del soporte se hará de manera que 0=eθ .
Aplicando la teoría de errores llegamos a las siguientes tablas:
Incógnita c
Medida e
eeeeee
PSaPSbc −+
=)(
Incertidumbre
( ) PP
SbaS
Pba
bPSa
PSc
e
eee
e
ee
e
e
e
e
Δ−
+Δ−
+Δ⎟⎟⎠
⎞⎜⎜⎝
⎛++Δ≅Δ 21
Intervalo de
incertidumbre ccccc ee Δ+≤≤Δ− *
(Tabla 10)
Incógnita δ
Medida eee cl −=δ
Incertidumbre θδ Δ+Δ+Δ≅Δ edcl
Intervalo de
incertidumbre δδδδδ Δ+≤≤Δ− ee *
(Tabla 11)
El valor θΔed es a priori desconocido. Si realizamos el montaje del soporte de
manera que el eje A1 coincida con el eje X del plato, podemos suponer el error θΔed
muy inferior a los otros sumandos y por tanto despreciarlo.
Autor: David Serrano Martínez 01/12/2001
27 de 37
9.2 MEDIDA EN VERTICAL DE LA EXCENTRICIDAD DEL C.D.M.
(Figura 6)
Se apoya la base del cuerpo a medir (pieza naranja de la figura 6) sobre el plato de
la balanza centroscópica. En dicha figura se ha representado de manera exagerada un
error de perpendicularidad entre el eje del cuerpo y su base, así como un error al intentar
hacer coincidir el centro de la base del cuerpo con el centro del plato.
Se explica a continuación la nomenclatura que se usará en el desarrollo de este
procedimiento de medida:
• G: Centro de masas del objeto a medir.
• A: intersección del eje del cuerpo con el plato de la balanza.
O
B G
O
ab
c
r
A
Autor: David Serrano Martínez 01/12/2001
28 de 37
• B: intersección del eje del cuerpo con el plano que contiene a G y es
perpendicular al eje del cuerpo.
• El vector a corresponde al vector OA . Supondremos que la distancia entre O y
A está acotada dentro del intervalo [ ]aΔ,0 .
• El vector b es la proyección sobre el plato del vector AB . Supondremos que la
distancia entre A y B está acotada dentro del intervalo [ ]Mm ll , .
• El vector c es la proyección sobre el plato del vector BG . La excentricidad
que pretendemos medir (y que llamaremos e) es la norma del vector BG .
• El vector r es la suma de los tres vectores anteriores. Con los métodos ya
estudiados podemos medir r . Supondremos que esta distancia está acotada
dentro del intervalo [ ]Mm rr , .
• Supondremos que el ángulo entre el eje del cuerpo y su base se encuentra
acotado en el intervalo [ ]αΔ,0 .
De la figura 6 obtenemos la siguiente relación vectorial:
( )barc +−= [68] Si al vector c le aplicamos los dos enunciados de la desigualdad triangular
resulta:
( ) αΔ+Δ+≤++≤++≤+−= cosMM larbarbarbarc [69]
( ) ( ) αΔ−Δ−≥−−=+−≥+−≥+−= cosMm larbarbarbarbarc
[70]
Por otra parte es fácil ver la siguiente relación:
ece ≤≤Δαsin [71]
Autor: David Serrano Martínez 01/12/2001
29 de 37
Si combinamos [69], [70] y [71] resulta:
{ } ( )αα
α Δ+Δ+Δ
≤≤Δ−Δ− cossin
1cos,0 MMMm larelarmáx [72]
La medición se efectuará con el cuidado suficiente para asegurar un error de
posicionamiento del centro de la base del cuerpo con respecto del centro del plato muy
pequeña. Así pues consideraremos cero la medida de dicha magnitud. Por otra parte se
entiende que el error de perpendicularidad entre la base del cuerpo y su eje es muy
pequeño. Por ello la medida de dicha magnitud también se considerará cero.
Si esto así, la medida de e será igual a la medida de r , que denominaremos er .
Por último podemos sustituir Ml por su valor medido el , con lo que cometemos tan sólo
un error de segundo orden.
A continuación resumimos en una tabla los resultados obtenidos:
Incógnita e
Medida ee re =
Intervalo de
incertidumbre { } ( )α
αα Δ+Δ+
Δ≤≤Δ−Δ− cos
sin1*cos,0 e
Me
m larelarmáx
(Tabla 12)
Autor: David Serrano Martínez 01/12/2001
30 de 37
9.3 MEDIDA EN HORIZONTAL DE LA EXCENTRICIDAD DEL C.D.M.
Aún cuando la base del cuerpo se centre muy bien en el plato ( aΔ muy pequeño),
si el cuerpo tiene su c.d.m. a una altura considerable ( el grande) y su error de
perpendicularidad es también acusado ( αΔ grande), el intervalo de incertidumbre dado
en la tabla 12 puede llegar a ser inaceptablemente grande.
Para solventar este problema nos vemos obligados a usar un procedimiento no
formal de medida, consistente en apoyar el cuerpo sobre una cuna dotada de rodillos.
(Figura 7)
A B’ G’
γ
b
Sección a-a’
B
G
x
y
X
Y
G
O
α
θ
BA
C
A2
A1
a
a’
a2
a2’
a1
a1’
b
b’
ε
Autor: David Serrano Martínez 01/12/2001
31 de 37
En la figura 7 se ha representado el cuerpo dispuesto sobre la cuna de rodillos. Se
ha destacado el posible error de circularidad de la sección transversal al eje del cuerpo
que contiene al c.d.m. De manera análoga se destaca el posible error de paralelismo
entre los ejes A1 y A2 que se definirán a continuación.
Explicamos la nomenclatura que se usará en el desarrollo de este procedimiento
de medida:
• Eje A1: es la intersección entre el plano de simetría del soporte de rodillos y el
plato de la balanza.
• Eje A2: es el eje del cuerpo a medir.
• Plano a-a’: es aquél que siendo perpendicular a A1, pasa por el centro de masas
G del cuerpo a medir.
• Plano a1-a1’: es aquél que siendo paralelo al plano a-a’, pasa por la primera fila
de rodillos.
• Plano a2-a2’: es aquél que siendo paralelo al plano a-a’, pasa por la segunda fila
de rodillos.
• Plano b-b’: es aquél que siendo perpendicular a A2, pasa por el centro de
masas G del cuerpo a medir.
• A: punto intersección del plano a-a’ y el eje A1.
• B: punto intersección del plano a-a’ y el eje A2.
• C: punto intersección del plano b-b’ y el eje A2.
• B’: proyección del punto B sobre el plato de la balanza.
• G’: proyección del centro de masas del cuerpo sobre el plato de la balanza.
• a: distancia entre los puntos O y A.
• b: viene representado en la figura 7. Es una magnitud dotada de signo, siendo
éste positivo si su orientación coincide con la dibujada en dicha figura.
• Los ángulos α, θ, ε y γ vienen señalados con claridad en la figura 7, por lo que
omitimos su descripción.
Está claro que la excentricidad buscada corresponde a:
Autor: David Serrano Martínez 01/12/2001
32 de 37
CGe = [73]
Si llamamos ξ al ángulo que forman los vectores BG y CG , podemos escribir:
eBG =ξcos [74]
La ecuación de equilibrio de la balanza será en este caso:
( ) 0sincoscos
cos =⎥⎦
⎤⎢⎣
⎡+⎟⎟
⎠
⎞⎜⎜⎝
⎛+++++ PebaMMWr QW θαγ
ξε [75]
Manteniendo constante el ángulo α, tomaremos dos medidas en sendas
orientaciones del cuerpo, que denominaremos γM y γm, de manera que γM se corresponda
con la lectura nM máxima algebraica (teniendo en cuenta el signo) visualizada en el
display y γm se corresponda con la lectura nm mínima algebraica visualizada en el
display, al hacer girar el cuerpo sobre los rodillos. Sea MM el par correspondiente a la
lectura nM y Mm el par correspondiente a la lectura nm. Las dos ecuaciones de equilibrio
son:
( ) 0sincoscos
cos =⎥⎦
⎤⎢⎣
⎡+⎟⎟
⎠
⎞⎜⎜⎝
⎛+++++ PebaMMWr M
MMMMQMW θαγ
ξε [76]
( ) 0sincoscos
cos =⎥⎦
⎤⎢⎣
⎡+⎟⎟
⎠
⎞⎜⎜⎝
⎛+++++ PebaMMWr m
mmmmQmW θαγ
ξε [77]
Si operamos [76] - [77] obtenemos:
( ) ( ) ( ) 0sincoscos
coscoscoscos =
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
+⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛−+−+−+− PebbaaMM
m
m
M
MmMmmMMmM θα
ξγ
ξγεε
[78]
Autor: David Serrano Martínez 01/12/2001
33 de 37
Como podemos observar, este método no es formal por cuanto que no podemos
medir las magnitudes Ma , ma , Mε , mε , Mγ , mγ , Mξ , mξ , Mb y mb . Haremos las
siguientes consideraciones:
• Si el montaje del soporte lo hacemos de manera que 0=eθ y la medición la
efectuamos con un ángulo 2πα =e , es evidente que e
Mn y eMM se alcanzarán
para un ángulo γM en el entorno de 0, por lo que asumiremos: 0=eMγ , mientras
que emn y e
mM se alcanzarán para un ángulo γm en el entorno de π, por lo que
asumiremos: πγ =em .
• Si efectuamos el montaje del soporte de manera que los ejes A1 y X coincidan,
entonces podemos suponer:
o ⎥⎦⎤
⎢⎣⎡ Δ+Δ−∈ επεπε
2,
2*M , siendo
2πε =e
M .
o ( ) ( )[ ]alala eeeeM Δ+−Δ−−∈ δδ ,* , siendo eee
M la δ−= .
o ⎥⎦⎤
⎢⎣⎡ Δ+Δ−∈ επεπε
2,
2*m , siendo
2πε =e
m .
o ( ) ( )[ ]alala eeeem Δ+−Δ−−∈ δδ ,* , siendo eee
m la δ−= .
• También es razonable realizar las siguientes suposiciones:
o [ ]ξξξ ΔΔ−∈ ,*M , siendo 0=eMξ .
o [ ]ξξξ ΔΔ−∈ ,*m , siendo 0=emξ .
o [ ]bbbM ΔΔ−∈ ,* , siendo 0=eMb .
o [ ]bbbm ΔΔ−∈ ,* , siendo 0=emb .
Partiendo de la expresión [78], teniendo las últimas consideraciones estudiadas y
aplicando la teoría de errores llegamos a las expresiones para la medida e incertidumbre
que se resumen en la tabla siguiente:
Autor: David Serrano Martínez 01/12/2001
34 de 37
Incógnita e
Medida e
em
eMe
PnnKe
2)( −
−=
Incertidumbre ( ) εδ Δ−+Δ+Δ+Δ
≅Δ eee
e
e lbPPe
PMe
Intervalo de
incertidumbre { } eeeeemáx ee Δ+≤≤Δ− *,0
(Tabla 13)
Centrémonos a continuación en la sección a1-a1’. Esta tendrá un pequeño error de
circularidad (figura 8), debido a dos posibles causas: pequeñas deficiencias en el
torneado de la pieza y falta de paralelismo entre los ejes A1 y A2
La máxima distancia posible Δb1 entre el punto B1 y el plano de simetría de los
rodillos, podemos extraerla de la figura 9, donde ρ es el radio de los rodillos.
(Figura 8)
rM
rm
B1
Sección a1-a1’
Autor: David Serrano Martínez 01/12/2001
35 de 37
(Figura 9)
Observando la figura 9 podemos escribir:
( )2
cos1drb M −+=Δ ζρ [79]
Si aplicamos el teorema del coseno al triángulo dibujado tenemos:
( ) ( ) ( ) ζρρρ cos2222MMm rddrr +−++=+ [80]
Si despejamos ( ) ζρ cosMr+ de la expresión anterior obtenemos:
( ) ( ) ( )[ ]222
21cos drrd
r mMM ++−+=+ ρρζρ [81]
Si combinamos [79] y [81] llegamos a:
( ) ( )d
rrb mM
2
22
1+−+
=Δρρ [82]
ρ+rM ρ +rm
Δb1
B1
d
ζ
Sección a1-a1’
Autor: David Serrano Martínez 01/12/2001
36 de 37
La expresión anterior se puede escribir de la siguiente forma:
( )[ ]( )d
rrrrb mMmM
22
1−++
=Δρ [83]
Denominemos Δr1 al error de circularidad del cuerpo en la sección a1-a1’.
mM rrr −=Δ 1 [84]
En este punto cometeremos tan sólo un error de segundo orden si aproximamos el
promedio de rM y rm con el radio nominal de la sección a1-a1’, que llamaremos Nr , tal y
como se indica en la expresión siguiente:
2mM
Nrrr +
≅ [85]
Cometeremos también un error de segundo orden si sustituimos los valores
exactos de ρ y d (los cuales son desconocidos), por sus respectivos valores medidos eρ
y ed .
Atendiendo a estas consideraciones y combinando [83], [84] y [85] obtendremos:
11 rd
rb eN
e
Δ+
=Δρ [86]
Podemos efectuar el mismo análisis en la sección a2-a2’, llegando a una expresión
equivalente:
22 rd
rb eN
e
Δ+
=Δρ [87]
Puesto que los puntos B1, B y B2 pertenecen al eje A2, y el punto B está situado
entre los otros dos, es claro que:
Autor: David Serrano Martínez 01/12/2001
37 de 37
{ }21, bbmáxb ΔΔ≤Δ [88]
Definamos Δr como:
{ }21, rrmáxr ΔΔ=Δ [89]
Entonces podemos acotar Δb de la siguiente forma:
rd
rb eN
e
Δ+
≤Δρ [90]
Llegando a este punto podemos reformular las expresiones de la tabla 13 en su
expresión definitiva, como se recoge en la tabla siguiente: