Bharath Niketan Engineering College , Aundipatty Department of Electrical and Electronics Engineering IC6501 - Control System Unit 1 1.Define the Transfer Function of a system. It is defined as the ratio of Laplace transform of output to Laplace transform of input with all initial conditions as Zero. Transfer Function = C(s) R(s) 2. Give the Electrical Analog elements of a translational and Rotational Mechanical System? Analogy of Mechanical system S.no Translational systems Electrical system F-V analogy F- I analogy 1. Force F Voltage V Current I 2. Velocity v Current i Voltage v 3. Mass M Inductance L Capacitance C 4. Friction B Resistance R Conductance 1/R 5. Spring K Reciprocal of Capacitance 1/C Reciprocal of Inductance 1/L 6. Displacement x Charge q Flux Ø Analogy of Mechanical system S.no Rotational systems Electrical system F-V analogy F- I analogy 1. Torque T Voltage V Current I 2. Angular Velocity ω Current i Voltage v 3. Moment of inertia J Inductance L Capacitance C 4. Friction B Resistance R Conductance 1/R 5. Spring K Reciprocal of Capacitance 1/C Reciprocal of Inductance 1/L 6. Angular Displacement θ Charge q Flux Ø 3. What are the three basic elements of Mechanical systems and give its force equation? 1. Mass (M) 2. Dashpot (B) 3. Spring (K) 4. Write the mason’s gain formula and briefly about the various terms. Transfer function = 1 ∑ T k ∆ k ∆ k =0 Where K – no. of forward path T k –gain of K th forward path ∆ - System determinant to be calculated as ∆ = 1 – [ sum of all individual feedback loop gains ] +[sum of gain product of all possible combination of two non- touching loops] -[sum of gain product of all possible combination of three non- touching loops] +… ∆ k - ∆ for that part of the graph which is not touching K th forward path. 5. What are analogous system? If two systems are described by dynamical equation of similar form, these are said to beb analogous systems.
Transcript
Bharath Niketan Engineering College , Aundipatty
Department of Electrical and Electronics Engineering
IC6501 - Control System
Unit 1
1.Define the Transfer Function of a system.
It is defined as the ratio of Laplace transform of output to Laplace transform of input with
all initial conditions as Zero.
Transfer Function = C(s)
R(s)
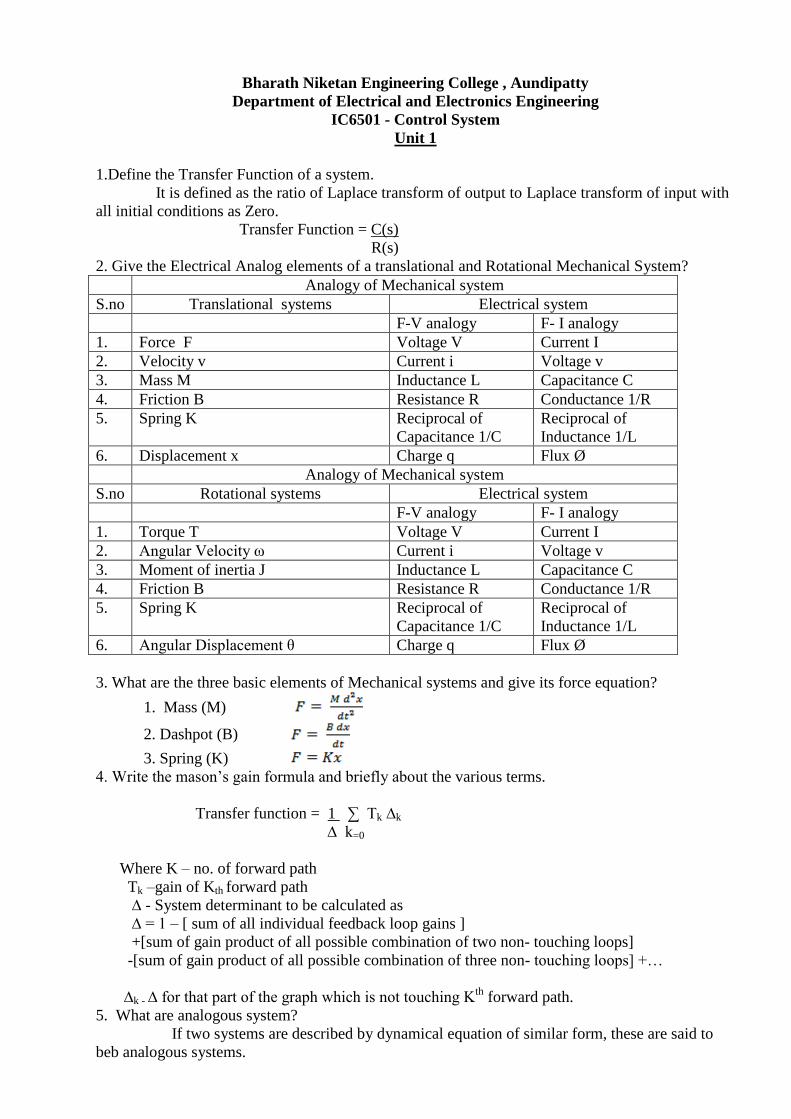
2. Give the Electrical Analog elements of a translational and Rotational Mechanical System?
Analogy of Mechanical system
S.no Translational systems Electrical system
F-V analogy F- I analogy
1. Force F Voltage V Current I
2. Velocity v Current i Voltage v
3. Mass M Inductance L Capacitance C
4. Friction B Resistance R Conductance 1/R
5. Spring K Reciprocal of
Capacitance 1/C
Reciprocal of
Inductance 1/L
6. Displacement x Charge q Flux Ø
Analogy of Mechanical system
S.no Rotational systems Electrical system
F-V analogy F- I analogy
1. Torque T Voltage V Current I
2. Angular Velocity ω Current i Voltage v
3. Moment of inertia J Inductance L Capacitance C
4. Friction B Resistance R Conductance 1/R
5. Spring K Reciprocal of
Capacitance 1/C
Reciprocal of
Inductance 1/L
6. Angular Displacement θ Charge q Flux Ø
3. What are the three basic elements of Mechanical systems and give its force equation?
1. Mass (M)
2. Dashpot (B)
3. Spring (K)
4. Write the mason’s gain formula and briefly about the various terms.
Transfer function = 1 ∑ Tk ∆k
∆ k=0
Where K – no. of forward path
Tk –gain of Kth forward path
∆ - System determinant to be calculated as
∆ = 1 – [ sum of all individual feedback loop gains ]
+[sum of gain product of all possible combination of two non- touching loops]
-[sum of gain product of all possible combination of three non- touching loops] +…
∆k - ∆ for that part of the graph which is not touching Kth
forward path.
5. What are analogous system?
If two systems are described by dynamical equation of similar form, these are said to
beb analogous systems.
6. State advantage & disadvantages of Closed and Open Loop System.
Open Adv: 1.1.simple & economical 2. stable system
Closed Adv : 1.Sensitivity is small to make system stable 2. Less affected by noise
Dis adv : 1.Complex & Costlier 2.reduces overall gain
7. . Name any two Effects of Feedback Control System?
Positive : 1.Increase error signal &lead to instability. 2. Amplify certain internal signal
Negative: 1.Better stability in Steady state,2. reject disturbance signal 3. Low sensitivity to
Parameter Variation.4. Bandwidth increases
8. What is Synchros? Write any two applications of Synchros.
* Synchro is a electromagnetic transducer and it is a device used to convert an Angular motion to an
Electrical signal (or) Vice versa. It works on Principle of a rotating transformer .
*It is used for remote transmission of shaft position in A.C Servomechanism and used as error detector.
9. What are the Advantage of Block diagrams Representation?
1. Simple to Construct for Complicated System 2.Individual elements can be visualized
3. Overall Performance Can be Studied 4.Closed Loop T.F can be easily calculated.
10. Differentiate between open loop and closed loop control system?
S.No Open loop System Closed loop system
1 Any change in output has no effect
on the input
Change in output affects the input
2 Feedback does not exists Feedback is possible
3 Error detector is absent Error detector is necessary
4 It is accurate and unreliable Highly accurate and reliable
5 Highly sensitive to environmental
change and disturbances
Less sensitive to environmental
change and disturbances
6 Simple to construct and cheap Complicated to design and hence
costly
7 Generally stable Stability is the major consideration
while designing
Unit -2
1. Name the Test Signals used in Control System.
1. Step 2.Ramp 3. Parabolic 4.Impulse
2. How are systems classified based on the Damping Factor?
1.ζ = 0 Undamped System 2. ζ = 1 Critically damped System
3. ζ > 1 Over damped System 4. 0 < ζ <1 under damped System
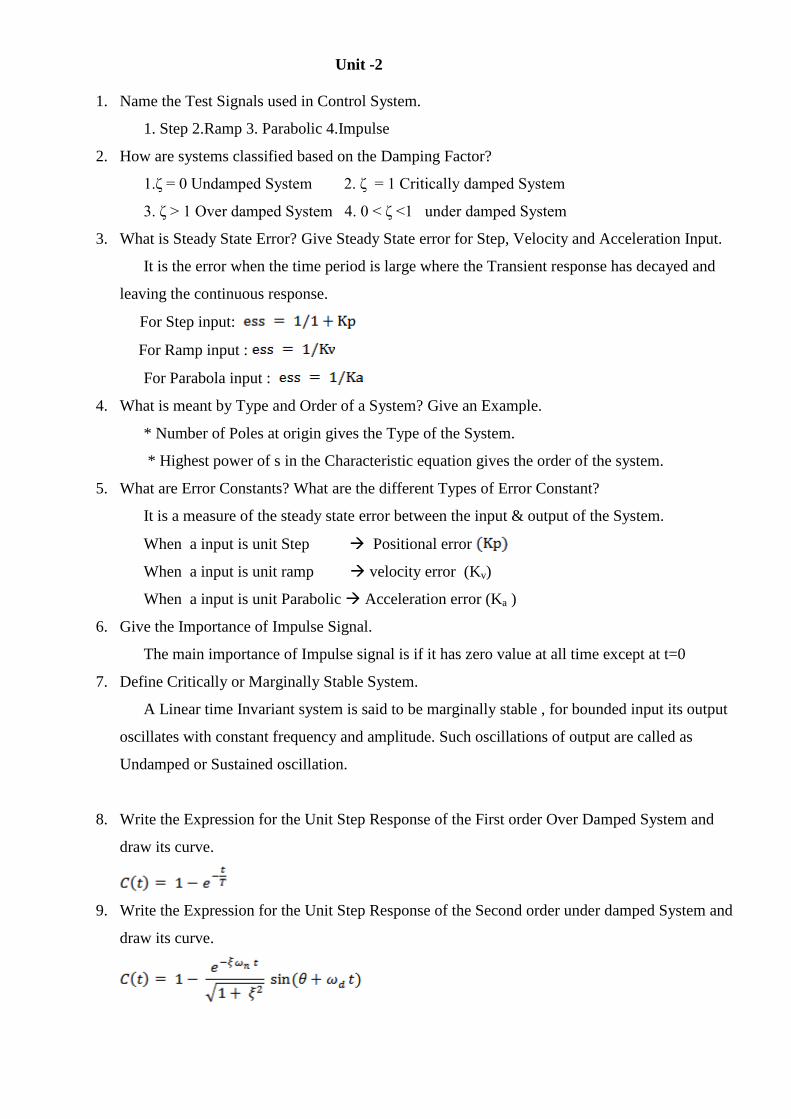
3. What is Steady State Error? Give Steady State error for Step, Velocity and Acceleration Input.
It is the error when the time period is large where the Transient response has decayed and
leaving the continuous response.
For Step input:
For Ramp input :
For Parabola input :
4. What is meant by Type and Order of a System? Give an Example.
* Number of Poles at origin gives the Type of the System.
* Highest power of s in the Characteristic equation gives the order of the system.
5. What are Error Constants? What are the different Types of Error Constant?
It is a measure of the steady state error between the input & output of the System.
When a input is unit Step Positional error
When a input is unit ramp velocity error (Kv)
When a input is unit Parabolic Acceleration error (Ka )
6. Give the Importance of Impulse Signal.
The main importance of Impulse signal is if it has zero value at all time except at t=0
7. Define Critically or Marginally Stable System.
A Linear time Invariant system is said to be marginally stable , for bounded input its output
oscillates with constant frequency and amplitude. Such oscillations of output are called as
Undamped or Sustained oscillation.
8. Write the Expression for the Unit Step Response of the First order Over Damped System and
draw its curve.
9. Write the Expression for the Unit Step Response of the Second order under damped System and
draw its curve.
10. What is the effect of PI & PD controller on a system performance?
Effects of PI Controller:
Increases the order and type of the system
Design of Ki must be proper to maintain stability of the system
Steady state error reduces for same type of input
Improves steady state response.
Effects of PD Controller:
Increases damping ratio
Reduces peak overshoot and settling time.
ωn ,type and steady state error of the system remains unchanged
improves transient response.
Unit - 3
1. List the advantage & disadvantage of frequency domain analysis.
Adv:1.Without the knowledge of the T.F ,the Frequency response of Stable Open
Loop System can be obtained experimentally.
2.This method is easy to design a control system.
D.adv:1.Applied only to Linear System 2.It is Practically Time Consuming .
2. Define gain cross over frequency and phase cross over frequency.
ωgc : It is the frequency at which magnitude of G(jω) is Zero db.
ωpc : It is the frequency at which magnitude Phase angle (ϕ) of G(jω) is -1800 line.
3. Define Gain margin & Phase margin.
GM : It is the magnitude in decibel at Phase cross over frequency ωpc..
P.M : It is the sum of 1800 and phase angle at Gain cross over frequency ωgc.
P.M = 1800 + ϕgc
4. List the advantage & disadvantage of frequency domain analysis.
Adv:1.Without the knowledge of the T.F ,the Frequency response of Stable Open Loop
System can be obtained experimentally.
2.This method is easy to design a control system.
D.adv:1.Applied only to Linear System
2.It is Practically Time Consuming .
5. For a stable system both GM and PM should be positive. Justify the statement. (or)
Give the condition for stability in bode plot?
When ωgc < ωpc. Then G.M & P.M will be Positive.
6. What are the advantages of Bode plot?
1. Easy to Construct with both Low & High Frequency Characteristics of T.F.
2. Relative Stability & Frequency Domain Specification can be calculated.
7. How is gain margin & phase margin is determined in Polar Plot?
G.M = 1/ │ G (jω) H (jω) │ω = ωpc
P.M = 180 + ∟│ G (jω) H (jω) │ ω = ωgc
8. What are the characteristics of an unstable system?
1. It Output will be Oscillatory
2. It has Infinite Settling Time.
9. Define Resonant frequency and Resonant Peak.
Resonant Peak : The Maximum value of the magnitude of closed loop Transfer Function is
called as Resonant peak Mr.
Resonant Frequency : The frequency at which the resonant peak occurs is called as resonant
frequency ωr .
10. Define bandwidth and cutoff rate?
BW : The range of frequency for which the system gain is more than -3db is known as Bandwidth.
Cutoff rate: The slope of log magnitude curve near the cut off frequency is called cutoff rate.
Unit - 4
1. State Routh's -Hurwitz criterion for stability.
Routh : It states that all terms in the first column of Routh's array must have same sign. (i.e)
There should not be any sign change in the I column of Routh's array.
Hurwitz : The necessary and sufficient condition for a stable system is to have all the roots od the
characteristics equation must lie on the left half of the s - plane.
2. How are the location of roots of characteristics equation related to stability?
All the roots of the characteristics equation must lie in the left half of the s-Plane.
3. What is dominant poles and zeros.
The poles sand zeros which decide the transient response of the system are called dominant
poles and zeros. The poles and zeros which are located too far away from the imaginary axis in the
left half the s-plane vanish quickly from the transient response hence those which are located near
the imaginary axis in left half of the s-plane are dominant poles and zeros.
4.What is the need for compensation?
A good control system must have less error
Good accuracy
Good speed of response
Good relative stability
Damping which will not cause overshoot.
5. What is the effect of Lead compensator?
It adds dominant poles and zeros and increases the damping of closed loop system.
Reduces peak overshoot, rise time and settling time.
improvement in transient response.
improves phase margin and gain margin
steady state error does not get affected.
6. What is the effect of Lag compensation?
Allows high gain at low frequencies so known as low pass filter.
improves steady state performance .
attenuation due to lag compensator shifts ωgc to lower frequency point.
Longer rise time, settling time, reduced bandwidth, slower response so longer transient response.
system becomes more sensitive to parameter variation and system becomes less stable.
7. State Nyquist stability criterion.
It states that the Nyquist contour in the s-plane encircles the point (-1+j0) in the
anticlockwise direction as many times as the number of right half the s-plane poles of G(s)H(s),
Then the closed loop system is stable.
8. Define compensator and list the types of compensator.
An external device which is used to alter the behaviour of the system so as to achieve required
specification is called compensator.
Types : Series,Parallel and series-Parallel compensator.
Lead,Lag and Lag-Lead cmpensation.
9. What is Lead and Lag compensator?
Lead : A compensator having the characteristics of a lead network is called as lead
compensation and it is a basically high pass filter.
Lag: A compensator having the characteristics of a lag network is called as lead compensation
and it is a basically Low pass filter.
10. How will you get closed loop response from open loop response.
Using M and N circles the closed loop frequency response from open loop frequency response
can be obtained.
Unit -5
1.Define state
State : It is a minimal set of variables such that the knowledge of these variables at t= to together
with the knowledge of inputs for t ≥ to completely determines the behaviour of the system for t > to.
2. Define state variable.
The variable involved in determining the state of a dynamic system x(t) are called state
variables. These are normally the energy storing element contained in the system.
3. Define controllability.
A system is said to be completely state controllable if it is possible to transfer the sysytem
state from any initial state X(t0) to any other desired state X(td) in specified finite time by a control
system.
4. Define Controllability.
A system is said to be completely observable if every state of X(t) can be completely
identified by measurements of the output Y(t) over a finite time interval.
5. Write down the necessary condition for controllability using kalman's test.
A system is completely observable if the rank of composite matrix if the rank of composite
matrix Qc = n
Qc = [ B AB A2B ..... A
n-1 B]
6. Write down the necessary condition for controllability using kalman's test.
A system is completely observable if the rank of composite matrix if the rank of composite
matrix Qo = n
Qo = [CT A
T C
T ( A
T)2 C
T .....( A
T)n-1
CT]
7. Write the state model for linear time invariant system ?
State equation : Output equation : Y(t) = C X(t) + DU(t)
8. Mention the need for state variables.
Suitable for Higher order equation.
Significant initial condition can be included
Multi input and Multi output can be used
Other than Linear and time invariant system can also used for analysis
Other than standard inputs can also be used.
9. Give the choice of state variable in an electrical system.
The state variable is chosen such that the current and voltage of energy storing elements.
1. Current through the inductor 2.Voltage across the Capacitor
10. List the advantage of Phase variable.
Easy to implement.
easy to establish the link between transfer function design and time domain design using
phase variable.
EE6501-POWER SYSTEM ANALYSIS
IIIEEE-VSEM
UNIT-I
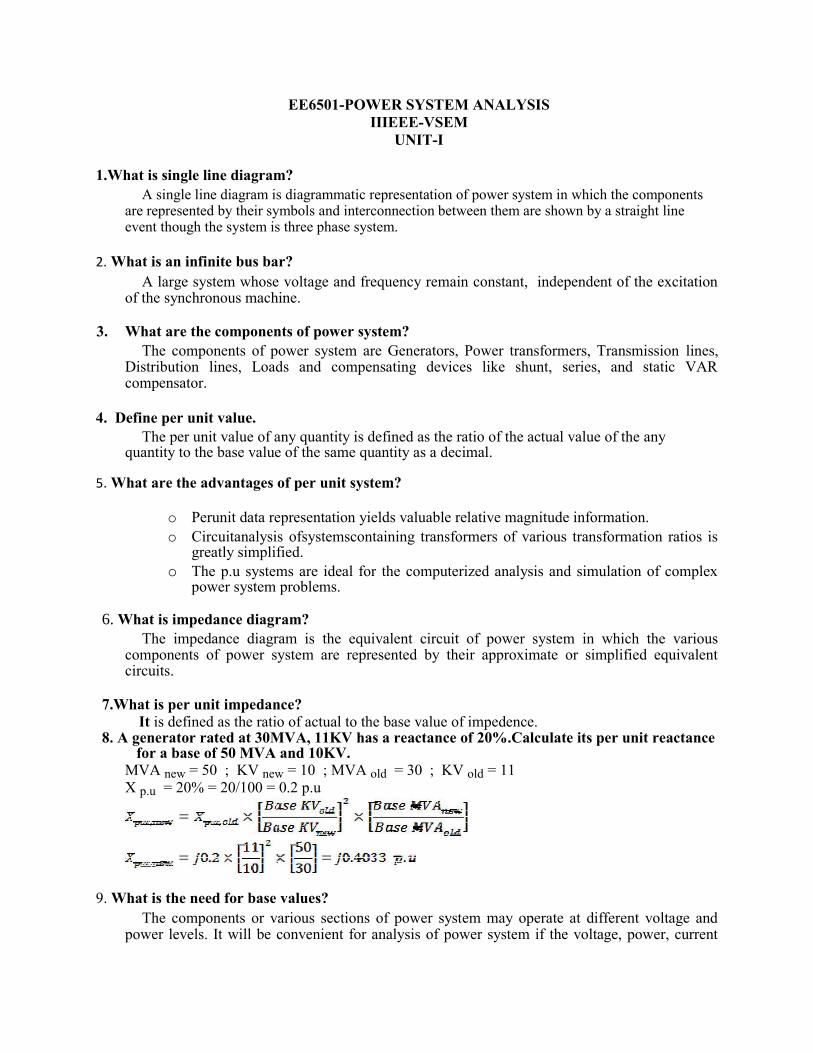
1.What is single line diagram? A single line diagram is diagrammatic representation of power system in which the components
are represented by their symbols and interconnection between them are shown by a straight line event though the system is three phase system.
2. What is an infinite bus bar?
A large system whose voltage and frequency remain constant, independent of the excitation of the synchronous machine.
3. What are the components of power system? The components of power system are Generators, Power transformers, Transmission lines,
Distribution lines, Loads and compensating devices like shunt, series, and static VAR compensator.
4. Define per unit value.
The per unit value of any quantity is defined as the ratio of the actual value of the any quantity to the base value of the same quantity as a decimal.
5. What are the advantages of per unit system?
o Perunit data representation yields valuable relative magnitude information. o Circuitanalysis ofsystemscontaining transformers of various transformation ratios is
greatly simplified. o The p.u systems are ideal for the computerized analysis and simulation of complex
power system problems.
6. What is impedance diagram? The impedance diagram is the equivalent circuit of power system in which the various
components of power system are represented by their approximate or simplified equivalent circuits.
7.What is per unit impedance?
It is defined as the ratio of actual to the base value of impedence. 8. A generator rated at 30MVA, 11KV has a reactance of 20%.Calculate its per unit reactance for a base of 50 MVA and 10KV.
MVA new = 50 ; KV new = 10 ; MVA old = 30 ; KV old = 11 X p.u = 20% = 20/100 = 0.2 p.u
9. What is the need for base values?
The components or various sections of power system may operate at different voltage and power levels. It will be convenient for analysis of power system if the voltage, power, current
and impedance rating of components of power system are expressed with reference to a common value called base value.
10. What is the purpose of using single line diagram? The purpose of the single line diagram is to supply in concise form of the significant
information about the system. UNIT-II
1.What is power flow study or load flow study? The study of various methods of solution to power system network is referred to as load flow
study. The solution provides the voltages at various buses, power flowing in various lines and line losses.
2. What is the need for load flow study?
The load flow study of a power system is essential to decide the best operation of existing system and for planning the future expansion of the system. It is also essential foe designing a new power system.
3.What are the different types of buses in a power system? Or how the buses are
classified and what are its types?
Types of bus Known or specified Unknown quantities
quantities quantities to be
determined
Slack or Swing or Reference bus V, δ P,Q Generator or Voltage control or PV
bus P, V Q, δ
Load or PQ bus P, Q V, δ 4.What is the need for slack bus?
The slack bus is needed to account for transmission line losses. In a power system the total power generated will be equal to sum of power consumed by loads and losses. In a power system only the generated power and load power are specified for buses. The slack bus is assumed to generate the power required for losses. Since the losses are unknown the real and reactive power are not specified for slack bus.
5.What are the methods mainly used for solution of load flow study?
The Gauss seidal method, Newton Raphson method and Fast decouple methods.
6.Discuss the effect of acceleration factor in load flow study. Acceleration factor is used in gauss seidal method of load flow solution to
increase the rate of convergence. Best value of alpha=1.6 7.When the generator buses are treated as load bus.
If the reactive power constraints of a generator bus violates the specified limits then the generator is treated as load bus.
8.What are the advantages of Gauss seidal method? Advantages: Calculations are
simple and so the programming task is lessees. The memory requirement is less. Useful for small systems;
9. What are the advantages and disadvantages of N.R method? Faster, more reliable and results are accurate, require less number of
iterations; Disadvantages: Program is more complex, memory is more complex.
10.What are the disadvantages of Gauss seidal method? Requires large no. of iterations to reach converge .Not suitable for large systems.
Convergence time increases with size of the system.
UNIT-III 1.What is meant by a fault?
A fault in a circuit is any failure which interferes with the normal flow of current. The faults are associated with abnormal change in current, voltage and frequency of the power system.
2. List the various types of faults.
1.Symmetrical fault or balanced fault
2.Unsymmetrical fault or unbalanced Line to ground (L-G) fault
Line to Line (L-L) fault Double line to ground (L-L-G) fault
3. Write the relative frequency of occurrence of various types of faults.
Types of fault Relative frequency of occurrence of faults Three phase fault 5%
Double line to ground fault 10% Line to Line fault 15% Line to ground fault 70%
4.What is the need for short circuit studies or fault analysis?
Short circuit studies are essential in order to design or develop the protective schemes for various parts of the system .To estimate the magnitude of fault current for the proper choice of circuit breaker and protective relays.
5.What is bolted fault or solid fault?
A Fault represents a structural network change equivalent with that caused by the addition of impedance at the place of a fault. If the fault impedance is zero, the fault is referred as bolted fault or solid fault.
6.Define short circuit capacity of power system or fault level. 6.
Short circuit capacity (SCC) or Short circuit MVA or fault level at a bus is defined as the product of the magnitude of the prefault bus voltage and the post fault current.
7. What is sub transient The synchronous reactance is the ratio of induced emf on no load and the sub transient
symmetrical rms current. 8.Why faults occur in a power system?
The faults occur in a power system due to Insulation failure of equipment Flashover of lines initiated by a lighting stroke
Due to permanent damage to conductors and towers or due to accidental faulty operations.
9. What is bus impedance matrix? Bus impedance matrix is the inverse of the bus admittance matrix.M atrix consisting of driving point
impedance and transfer impedances of the network is called as bus impedance matrix.
10. Give the methods available for forming bus impedance matrix. Form bus admittance matrix and take the inverse to get bus impedance matrix. Using bus building algorithm. .Using L-U factorization of Y-bus matrix.
UNIT-IV
1. What are the symmetrical components of a 3 phase system? In a 3 phase system, the unbalanced vectors (either currents or voltage) can be resolved
into three balanced system of vectors. Positive sequence components Negative sequence components Zero sequence components Unsymmetrical fault analysis can be done by using symmetrical components.
2. What are the positive sequence components?
It consists of three components of equal magnitude, displaced each other by 120˚ in phase and having the phase sequence abc .
Ic1
120
120
Ia1
120
Ib1
3. What are the negative sequence components?
It consists of three components of equal magnitude, displaced each other by 120˚ in phase and having the phase sequence acb .
Ib2
120
120
Ia2
120
Ic2 4. What are the zero sequence components?
It consists of three phasors equal in magnitude and with zero phase displacement from each other.
5. What is sequence operator?
In unbalanced problem, to find the relationship between phase voltages and phase currents, we use sequence operator ‘a’.
6. Write down the equations to convert symmetrical components into unbalanced phase currents. (Or) Determination of unbalanced currents from symmetrical currents.
7. Write down the equations to convert unbalanced phase currents into symmetrical
components. (Or) Determination of symmetrical currents from unbalanced currents.
Let, Ia, Ib, Ic be the unbalanced phase currents
Let, Ia0, Ia1, Ia2 be the symmetrical components of phase a
8. What are sequence impedance and sequence network?
The sequence impedances are the impedances offered by the power system components or elements to +ve, -ve and zero sequence current.
The single phase equivalent circuit of power system consisting of impedances to current of any one sequence only is called sequence network.
9. Draw the positive, negative and zero sequence network of all power system components.
Refer diagram
10. Write the equation to determine fault current for L-G, L-L and L-L-G fault with impedance.
Refer formula
UNIT-V
1. What is power system stability? The stability of an interconnected power system means is the ability of the power system is
to return or regain to normal or stable operating condition after having been subjected to some form of disturbance.
2. What is steady state stability limit?
The steady sate stability limit is the maximum power that can be transferred by a machine to receiving system without loss of synchronism
3. Define swing curve. The swing curve is the plot or graph between the power angle δ and time t. From the nature of
variations of δ the stability of a system for any disturbance can be determined. 4. . State the assumptions made in stability studies.
Machines represents by classical model
The losses in the system are neglected (all resistance are neglected) (The voltage behind transient reactance is assumed to remain constant.
Controllers are not considered ( Shunt and series capacitor )
Effect of damper winding is neglected.
5. Define critical clearing angle. The critical clearing angle , is the maximum allowable change in the power angle δ
before clearing the fault, without loss of synchronism. 6. List the methods of improving the transient stability limit of a power system.
o Reduction in system transfer reactance o Increase of system voltage and use AVR o Use of high speed excitation systems o Use of high speed reclosing breakers
7.. Define critical clearing time. The corresponding critical time for removing the fault is called critical clearing time
Write the power angle equation and draw the power angle curve.
Where, P – Real Power in watts Vs – Sending end voltage; Vr- Receiving end voltage XT - Total reactance between sending end receiving end
- Rotor angle.
Write the expression for maximum power transfer.
10. Write the swing equation for a SMIB (Single machine connected to an infinite bus bar) system.
M
Where H = inertia constant in MW/MVA f = frequency in Hz M = inertia constant in p.u
UNIT-I SYNCHRONOUS GENERATOR
1. What are the two classification synchronous machines? The classification synchronous machines are:
i. Cylindrical rotor type ii. Salient pole rotor type
2. What are the essential features of synchronous machine? i. The rotor speed is synchronous with stator rotating field. ii. Varying its field
current can easily vary the speed.
iii. It is used for constant speed operation.
3. What are the principal advantages of rotating field system type of construction
of synchronous machines? · Form Stationary connection between external circuit and system of conditions
enable the machine to handle large amount of volt-ampere as high as 500 MVA.
· The relatively small amount of power required for field system can be easily
supplied to the rotating field system via slip rings and brushes.
· More space is available in the stator part of the machine for providing more
insulation to the system of conductors.
· Insulation to stationary system of conductors is not subjected to mechanical stresses
due to centrifugal action.
· Stationary system of conductors can easily be braced to prevent deformation.
· It is easy to provide cooling arrangement.
4. Write down the equation for frequency of emf induced in an alternator.
F = PN / 120 Hertz
Where P = No. Of poles
N = Speed in rpm.
5. What are the advantages of salient pole type of construction used for
synchronous machines?
..They allow better ventilation.
.. The pole faces are so shaped radial air gap length increases from the pole center to
the pole tips so that flux distribution in the air gap is sinusoidal in shape which will
help to generate sinusoidal emf.
.. Due the variable reluctance, the machine develops additional reluctance power,
which is independent of excitation.
6. Why do cylindrical rotor alternators operate with steam turbines?
Steam turbines are found to operate at fairly good efficiency only at high
speeds. The high-speed operation of rotor tends to increase mechanical losses, so the
rotors should have smooth external surface. Hence smooth cylindrical type rotors with
less diameter and large axial length are used for synchronous generators driven by
steam turbines with either 2 or 4 poles.
7. Why short-pitch winding is preferred over full pitch winding? Advantages: -
· Waveform of the emf can be approximately made to a sine wave and
distorting harmonics can be reduced or totally eliminated.
· Conductor material, copper is saved in the back and front-end connections due to
less coil span.
· Fractional slot winding with fractional number of slots/phase can be used which in
turn reduces the tooth ripples.
· Mechanical strength of the coil is increased.
8. Write down the formula for distribution factor.
Kd = sin (mβ/2) or Kdn = sin (mnβ/2)
msin(β/2) msin(nβ/2)
where
m - number of slots/pole/phase
β - angle between adjacent slots in electrical degree n - order of harmonics.
9. Why are alternators rated in kVA and not in kW?
The continuous power rating of any machine is generally defined as the power
the machine or apparatus can deliver for a continuous period so that the losses
incurred in the machine gives rise to a steady temperature rise not exceeding the limit
prescribed by the insulation class.
Apart from the constant loss the variable loss incurred in alternators is the copper loss,
occurring in the 3-phase winding, which depends on I2R, the square of the current
delivered by the generator. is directly related to apparent power delivered by the
generator, Thus the alternators have only their apparent power in VA/kVA/MVA as
their power rating.
10. What is meant by armature reaction in alternators?
The interaction between flux set up by the current carrying armature conductors
and the main field flux is defined as the armature reaction.
synchronous reactance?
It is the sum of the leakage reactance X1 and armature reactance Xa
Xs = X1 + Xa
What is meant by load angle of an alternator?
The phase angle introduced between the induced emf phasor E and terminal voltage
phasor V during the load condition of an alternator is called load angle. The load
angle increases
with increase in load. It is positive during generator operation and negative during
motor operation.
11 . Define the term voltage regulation of alternator. It is defined as the change in terminal voltage from no load-to-load condition
expressed as a function or terminal voltage at load condition, the speed and excitation
conditions remaining same. % Regulation = (E-V)/V x 100
12. What is the necessity for predetermination of voltage regulation?
Most of the alternators are manufactured with large power rating and large
voltage ratings. Conduction load test is not possible for such alternators. Hence other
indirect methods of testing are used and the performance can be predetermined at any
desired load currents and power factors.
13. Why is the MMF method of estimating the voltage regulation is considered as
the optimization method? Compared to EMF method, MMF method involves more number of complex
calculation steps. Further the OCC is referred twice and SCC is referred once while
predetermining the voltage regulation for each load condition. Reference of OCC
takes core saturation effect. As this method requires more effort, the final result is
very close to the actual value. Hence this method is called the optimistic method.
UNIT-II SYNCHRONOUS MOTOR
1. What does hunting of synchronous motor mean? When the load applied to the synchronous motor is suddenly increased or
decreased, the rotor oscillates about its synchronous position with respect to the stator
field. This action is called hunting.
2. What could be the reasons if a 3-phase synchronous motor fails to start? It is usually due to the following reasons a. Voltage may be too low.
b. Too much starting load.
c. Open circuit in one phase or short circuit. d. Field excitation may be excessive
3. What is synchronous condenser?
An over-excited synchronous motor under no load ,used for the improvement
of power factor is called as synchronous condenser because, like a capacitor it takes a
leading current.
4. Write the applications of synchronous motor. a. Used for power factor improvement in sub-stations and in industries. b. Used
in industries for power applications.
c. Used for constant speed drives such as motor-generator set, pumps and
compressors.
5. What is an inverted 'V' curve?
For a constant load, if the power factor is plotted against various values of field
exciting current, the curve formed is inverted V Shape and called as inverted 'V'
curve.Also draw draws the graph.
6. What are the two types of 3-phase induction motor? a. Squirrel cage induction motor. b. Slip ring induction motor.
features of slip ring induction motors. a. Rotor is having 3-phase winding.
b. Extra resistance can be added in the rotor circuit by connecting through the help of
three slip rings for improving the power factor, increasing Starting Torque, limiting
the starting current.
7. Why an induction motor is called rotating transformer?
The rotor receives electrical power in exactly the same way as the secondary of
a two winding transformer receiving its power from primary. That is why an induction
motor can be called as a rotating transformer i.e., in which primary winding is
stationary but the secondary is free to rotate.
Why an induction motor will never run at its synchronous speed?
If it runs at synchronous speed then there would be no related speed between the two,
hence no rotor emf, no rotor current so no rotor torques to maintain rotation. That is
why the rotor runs at its synchronous speed.
8. Define SCR? Short circuit ratio (SCR) is defined as the ratio of field current required to
produce rated voltage on open-circuit to field current required to produce rated
armature current with the terminals shorted, while the machine runs at synchronous
speed.
What are the losses determined from SCC?
i. Copper loss
ii. Mechanical loss
What are stray load losses?
Stray load loss is the sum of load core loss and loss due to the additional conductor
resistance offered to the ac.
9. What is direct axis?
The mmf wave is height when it is aligned with the field pole axis called the
direct axis or d axis.
What is quadrature axis?
The permeance offered to a mmf wave is lower when it is oriented 90o
To the field pole axis called the quadrature axis or q axis.
10. What are the two curves required for POTIER method?
i. No load curve.
ii. Full load zero power factor curve called wattless load charactertic.
main advantage of POTIER method?
The voltage regulation calculated by potier’s method is quite accurate.
UNIT-III THREE PHASE INDUCTION MOTOR
1. What are types of 3- phase induction motor?
i. Squirrel cage induction motor ii. Slip ring induction motor
Why the induction motor is called asynchronous motor?
Since the induction motor runs always at a speed lesser than synchronous speed, it is
called asynchronous motor.
2. What are slip rings? The slip rings are made of copper alloys and are fixed around the shaft
insulating it. Through these slip rings and brushes the rotor winding can be connected
to external circuits.
3. State the difference between slip ring rotor and cage rotor of an induction
motor? Slip ring rotor has 3-phase windings. Three ends of which are stared and the
other three ends are brought up and connected to 3 slip rings mounted in the shaft.
Extra resistance can be added in the rotor circuit. Squirrel cage rotor has short-
circuited copper bars. Extra resistance can’t be added as slip ring rotor.
4. What is cogging of an induction motor? When the number of stator and rotor teeth’s is equal or integral multiple of
rotor teeth ,they have a tendency to align themselves exactly to minimum reluctance
position. Thus the rotor may refuse to accelerate. This phenomenon is known as
cogging.
5. Explain why the no load current of an induction motor is much higher than
that of an equivalent transformer. In induction motor, due to the presence of the air gap, the magnetizing current
that is required to set up the flux is much higher. The working component of the
current has to meet the hysteresis loss, eddy current loss, friction and windage losses.
Hence the no load current of induction motor is higher.
6. What are the advantages of cage motor?
Ø Since the rotor has very low resistance, the copper loss is low and efficiency is high
Ø On the account of simple construction of rotor, it is mechanically robust.
Ø Initial cost is less.
Ø Maintenance cost is less.
Ø Simple stating arrangement
7. List out the methods of speed control of cage type 3-phase induction motor? a) By changing supply frequency
b) By changing the number of poles
c) By operating two motors in cascade
Mention different types of speed control of slip ring induction motor?
a) By changing supply frequency
b) By changing the number of stator poles c) By rotor rheostat control
d) By operating two motors in cascade
8. What are the advantages of 3-phase induction motor?
a) It was very simple and extremely rugged, almost unbreakable construction b) Its
cost is very low and it is very reliable
c) It has been suffiently high efficiency .No brushes are needed and hence
frictional losses are reduced
d) It requires minimum of maintenance.
9. State the application of an induction generator? a) Used in windmill for generating electric power.
b) Used in regenerative breaking places like traction.
10. What is the function of capacitor in a single-phase induction motor?
I. To make more phase difference between the starting and running winding. ii. To
improve the power factor and to get more torque.
UNIT-IV STARTING AND SPEED CONTROL OF THREE PHASE INDUCTION MOTOR
1.What are the types of starters? Stator rheostat, Autotransformer Star to Delta starter and rotor resistance starter.
2. List out the methods of speed control of cage type 3-phase induction motor? a) By changing supply frequency
b) By changing the number of poles
c) By operating two motors in cascade
different types of speed control of slip ring induction motor?
a) By changing supply frequency
b) By changing the number of stator poles c) By rotor rheostat control
d) By operating two motors in cascade
3.What is Universal motor?
A Universal motor is defined as a motor, which may be operated either on
direct current or single-phase ac supply.
state some application of universal motor.
Used for sewing machines, table fans, Vaccum cleaners, hair driers, blowers etc
4.Explain why single-phase induction motor is not self-starting one.
When the motor is fed from a single phase supply its stator winding produces
an alternating or pulsating flux, which develops no torque which is explained in
Double revolving field theory..
5.what is the application of shaded pole induction motor?
Because of its small starting torque, it is generally used for small fans, toys,
instruments, hair driers, ventilators, electric clock etc.
6.why single-phase induction motor has low power factor? The current through the running winding lags behind the supply voltage by a
very large angle. Therefore power factor is very low.
7.Diffrentiate between “capacitor start “and “capacitor start capacitor run
“induction motor? In capacitor start motor, capacitor is connected in series with the starting
winding. But it will be disconnected from the supply, when the motor picks up its
speed. But in capacitor start capacitor run motor the above starting winding and
capacitor are not disconnected, but always connected in the supply .so it has high
starting and running torque.
8. State the application of an induction generator? v Used in windmill for generating electric power.
v Used in regenerative breaking places like traction.
9.What is an induction regulator?
An induction regulator is used to obtain the constant voltage at the feeder end.
Varying the range between the magnetic axes of the primary and secondary windings
controls the voltage; it may be a single phase. Rotor is moved usually by a maximum
of 180 degree.
10.Define- Asynchronous torque.
When stator and rotor fields are stationary with respect to each other, a steady
torque is produced and rotation is maintained. Such a torque existing at any
mechanical speed other than synchronous speed is called as an asynchronous torque.
Unit –V SINGLE PHASE INDUCTION MOTORS AND SPECIAL MACHINES
1. Name the two winding of single phase induction motor?
Running and starting winding.
What are methods available for making single phase induction motor a self
starting?
By slitting the single phase, by providing shading coil in the poles.
2. What kind of motors used in ceiling fan and wet grinders? Ceiling fan # Capacitor start and capacitor run single phase induction motor, wet
grinders# Capacitor start capacitor run single phase induction motor.
3. What is the application of shaded pole induction motor? Because of its small starting torque, it is generally used for small toys, instruments,
hair driers, ventilators.etc.
In which direction a shaded pole motor runs?
The rotor starts rotation in the direction from unshaded part to the shaded part.
4. Differentiate between “capacitor start” & “Capacitor start capacitor run”
single phase induction motor? Capacitor start – capacitor is connected series with starting winding, but it will
be disconnected from supply when motor pick up its speed. Capacitor start capacitor
run# starting winding and capacitor will not be disconnected from supply even though
motor pickup its speed.
5. What are the advantages of cage motor? Since the rotor has low resistance, the copper loss is low and efficiency is very
high. On account of simple construction of rotor it is mechanically robust, initial cost
is less; maintenance cost is less, simple starting arrangement.
6. What is the use of shading coil in the shaded pole motor? In shaded pole motors the necessary phase –splitting is produced by induction.
These motors have salient poles on stator and a squirrel cage type rotor. The poles are
shaded ie each pole carries a copper band one of its unequally divided part is called
shading band. When single phase ac supply is given to the stator winding due to
shading provided to the poles a rotating magnetic field is generated.