79 ARCHITECTS “The Beauty of Ban.” Blueprint (June 2000): 46-50. Shigeru Ban’s the Japanese Pavilion, Expo 2000, Hanover, Germany. Carbajosa, Jorge and Javier Tejera. “All-purpose Pavilion.” http://www.fibersource.com/Textile_Arch/Cat-2.htm Cruickshank, Dan, ed. Sir Banister Fletcher’s A History of Architecture, 20th edition. Oxford, England: Architectural Press, 1998, 1655-1656. NA200 .F63 1996. Features Jørn Utzon’s Sydney Opera House. http://www.frit.ohio-state.edu/ncfs/conf.htm. Peter Eisenman’s the Greater Columbus Convention Center. Eisenman, Peter. “The Specter of the Spectacle.” Anymore (2000): 174-181. Article features the proposal for The St. George Ferry Terminal. Engel, H. Structure Systems. Preface by Ralph Rapson. New York: Van Nostrand Reinhold Company, 1981. Engel covers structure systems in terms of the module, whether concrete, steel or tensile structures. Einbinder, Harvey. An American Genius: Frank Lloyd Wright . New York: Philosophical Library, Inc., 1986, p. 6. NA737.W712 E56 1986. Frank Lloyd Wright was influenced in his childhood with the Fröbel Blocks. Fuller, R. Buckminster. Synergetics: Explorations in the Geometry of Thinking. New York: MacMillan Publishing Co., Inc., 1975. Q295 .F84 v.1. Tensegrity diagram based on Figure 401.00, Tensegrity Tetrahedron with “Me” Ball Suspended at Center of Volume of the Tetrahedron... (p. 789). Crippa, Maria Antoniett, ed. Living Gaudí: the Architect’s Complete Vision. New York: Rizolli International Publications, 2002. Image of Antonio Gaudí’s Sagrada Familia School Hoberman, Charles. “Faltstrukturen für temporäre Gebäude” (Temporary Unfolding Structures). Detail, vol. 36 no. 8 (Dec. 1996): 1184-1185. Bibliography
Transcript
79
ARCHITECTS
“The Beauty of Ban.” Blueprint (June 2000): 46-50. Shigeru Ban’s the Japanese Pavilion,Expo 2000, Hanover, Germany.
Carbajosa, Jorge and Javier Tejera. “All-purpose Pavilion.”http://www.fibersource.com/Textile_Arch/Cat-2.htm
Cruickshank, Dan, ed. Sir Banister Fletcher’s A History of Architecture, 20th edition.Oxford, England: Architectural Press, 1998, 1655-1656. NA200 .F63 1996. FeaturesJørn Utzon’s Sydney Opera House.
http://www.frit.ohio-state.edu/ncfs/conf.htm. Peter Eisenman’s the Greater ColumbusConvention Center.
Eisenman, Peter. “The Specter of the Spectacle.” Anymore (2000): 174-181. Articlefeatures the proposal for The St. George Ferry Terminal.
Engel, H. Structure Systems. Preface by Ralph Rapson. New York: Van NostrandReinhold Company, 1981. Engel covers structure systems in terms of the module,whether concrete, steel or tensile structures.
Einbinder, Harvey. An American Genius: Frank Lloyd Wright. New York: PhilosophicalLibrary, Inc., 1986, p. 6. NA737.W712 E56 1986. Frank Lloyd Wright was influenced inhis childhood with the Fröbel Blocks.
Fuller, R. Buckminster. Synergetics: Explorations in the Geometry of Thinking. NewYork: MacMillan Publishing Co., Inc., 1975. Q295 .F84 v.1. Tensegrity diagram based onFigure 401.00, Tensegrity Tetrahedron with “Me” Ball Suspended at Center of Volume ofthe Tetrahedron... (p. 789).
Crippa, Maria Antoniett, ed. Living Gaudí: the Architect’s Complete Vision. New York: RizolliInternational Publications, 2002. Image of Antonio Gaudí’s Sagrada Familia School
Meehan, Patrick J., editor of The Master Architect: Conversations with Frank LloydWright. New York: John Wiley & Sons, Inc. 1984, p. 216. NA737.W7 W68 1984.Frank Lloyd Wright on Fröbel Blocks.
MIT Kinetic Design Group“Case Studies in Kinetic Architecture.” http://kdg.mit.edu/Matrix/matrix.html
Russell, James S. “Will A New Wave Of Tropical Modernism Restore San Juan's Luster?”Architectural Record, vol. 190 (July 2002): 56. Features Toro Ferrer’s La Concha Supper Club
Vogt, A. Le Corbusier, the Noble Savage: Toward an Archeology of Modernism. Cam-bridge, Massachusetts: The MIT Press, 1998. NA1053.J4 V6413 1998. translated byRadka Donnell. Vogt cites Marc Soltaire, who wrote about how Friedrich Fröbel’s peda-gogy influenced le Corbusier childhood upbringing. Soltaire, M. “LC et l’urbain: larectification du damier froebelian,” in La Ville et l’urbanisme après LC ( le Colloque de1987, à La Chaux-de-Fonds), ed. E. Tippet and I. A. Humair (La Chaux-de-Fonds, 1993),pp. 93-117. Friedrich Fröbel’s influence on Le Corbusier.
Vollers, K. Twist&Build: creating non-orthogonal architecture. Rotterdam, The Nether-lands: 010 Publishers, 2001: 69. images of Santiago Calatrava’s Turning Torso Residen-tial Tower, Malmö, Sweden.
81
COMMENTARY/MATHEMATICS
Abelson, Harold. & diSessa, Andrea. Turtle Geometry: The Computer as a Medium forExploring Mathematics. MIT Press, Cambridge, MA, 1981. QA462.A23 1980
Coxeter, H. S. M. (Harold Scott MacDonald). Regular Polytopes. New York: Dover,1973. QA691 .C68 1963.
Cromwell, Peter R. Polyhedra. Cambridge, U.K.: Cambridge University Press, 1997, p.192-193. QA491 .C76 1997. Cromwell explains the origin of valency from chemistry inrelation to the naming of the parts making up a polyhedron.
Frazer, J., Frazer, J., Frazer, P. “New developments in intelligent modeling.” In Proc. ofComputer Graphics 81 (1981): 139-154. Online Publications.
Lyusternik, L. A. Convex Figures and Polyhedra. translated from the Russian by T.Jefferson Smith. New York: Dover Publications, Inc. 1963. QA 491 L4983.
Mortenson, Michael E. Computer Graphics Handbood: Geometry and Mathematics.New York: Industrial Press Inc., 1990. T385 .M6683 1990.
Whitehead, Ingrid. “Steel mesh and engineering wizardry unfold into a dome”. Architec-tural Record vol. 188, no. 10 (Oct. 2000): 79-80. Features Charles Hoberman’s Retract-able Dome at the German Pavilion at Expo 2000, Hanover, Germany.
82
Papert, Seymour———.Mindstorms: Children, Computers and Powerful Ideas. Basic Books, 1980———.The Children's Machine: Rethinking School in the Age of the Computer.
Basic Books, 1993. QA20.C65 P36 1980.
Parks, H. and Wills, D. “An Elementary Calculation of the Dihedral Angle of the Regularn-Simplex.” The American Mathematical Monthly vol. 109, no. 8 (2002): 756-758.
Poly is a shareware program for exploring and constructing polyhedra. With Poly, you canmanipulate polyhedral solids on the computer in a variety of ways. Flattened versions (nets)of polyhedra may be printed and then cut out, folded, and taped, to produce three-dimensionalmodels. Pedagoguery Software Inc. http://www.peda.com/poly/
“Schlegel diagram.” January 2004, updated 28-03-2004http://www.ac-noumea.nc/maths/amc/polyhedr/Schlegel_.htm
Smith, Stanley. A mathematical investigation for the lay reader in polyhedra. New York:Addison-Wesley Publishing Company, Inc., 1976.
wikipedia.orgvarious math terms for graph theory.“adjacency List” http://en.wikipedia.org/wiki/Adjacency_list“Adjacency Matrix” http://en.wikipedia.org/wiki/Adjacency_matrix“degree of freedom” http://en.wikipedia.org/wiki/Degrees_of_freedom“graph theory” http://en.wikipedia.org/wiki/Cycle_%28graph_theory%29“William Rowan Hamilton” http://en.wikipedia.org/wiki/William_Rowan_Hamilton“Hamiltonian path” http://en.wikipedia.org/wiki/Hamiltonian_path“simplex” http://en.wikipedia.org/wiki/Simplex“traveling salesman” http://en.wikipedia.org/wiki/Traveling_salesman_problem
83
EDUCATION AND LEARNING
Bhavnani, S., John, B. and Flemming, U. “The Strategic Use of CAD: an empiricallyinspired, theory based course.” In Proc. of CHI’99, Pittsburgh, Pennsylvania, May 15-20,1999: 83-190. The inefficient use of complex computer systems is costly and a sourceof frustration. However, this scenario may be improved upon through the instruction ofstrategies, in a addition to specific application skills.
Lawson, B. “CAD and Creativity: does the computer really help?” Leonardo, vol. 35 no.3 (2002): 327-331. Is the lack of creativity from CAD programs due to the inherentnature of computer programs (i.e. is not the real thing), or is it possible that the limitedapplication of CAD programs stunts the designer? This paper argues that creative designrequires deep rather than shallow analysis and that current CAD techniques are notnecessarily promoting this.
Nilsen, E., Jong, H., Olson, J., Biolsi, K., Reuter, H., Mutter, S. “The Growth of SoftwareSkill: A longitudinal look at learning & performance.” In Proc. INTERCHI ’93, Apr. 24-29, 1993: 149-156. Nilsen et al. researched into factors that contribute to learning andskill in the application Lotus 1-2-3. Motor skills remain stable throughout the three-yearresearch period. However, cognitive skills were affected by menu structure and repeti-tion, among other factors.
Rand, P. “Design and the Play Instinct.” Education of Vision. edited by Gyorgy Kepes.George Braziller, New York, New York. Gilbert Highet says, that of the two powerfulinstincts which exist in all human beings and which can be used in teaching, one is thelove of play. Playing, therefore, is a modus operandi conducive to learning.
Resnick, M. “Pianos not Stereos: creating computational construction kits.” Interactions,vol. 3, no. 6 (Sep./Oct. 1996). Educational technology emphasizes consumption, a pas-sive state, instead of creativity, an active state. The design of computational constructionkits should keep the designer in mind. Education, not entertainment should be the goal.
Scarlatos, L., Landy, S., Breban, J., Horowitz, R. and Sandberg, C. “On the Effectivenessof Tangible Interfaces in Collaborative Learning Environments.” Scarlatos et al. proposethat tangible interfaces enhance learning by helping children to stay focused, think aboutthe problem in new ways, and arrive at a viable solution.
84
Wake, Warren K. Design Paradigms: A Sourcebook for Creative Visualization. NewYork: John Wiley & Sons, Inc., 2000. TS171 .W35 2000.
PHYSICAL/TANGIBLE COMPUTING
Aish, R. “3D Input for CAAD Systems.” Computer-Aided Design, 11(2)( Mar. 1979): 66-70.
Anderson, D., Frankel, J., Marks, J., Agarwala, A., Beardsley, P., Hodgins, J. Leigh, D.,Ryall, K., Sullivan, E., Ydida, J. “Tangible Interaction + Graphical Interpretation: A NewApproach to 3D Modeling.” In the Proc. of SIGGRAPH 2000: 393-402. Development inembedded computation, vision-based acquisition, and graphical interpretation are keytechnologies for creating computational construction toys. Anderson et al. review twomodeling systems: Computational Building Blocks and digitizing clay models.
Boyle, Michael. “Phidgets: Privacy Preserving Media Space.” Michael Boyle created thisproject in an advanced course on human-computer interaction instructed by SaulGreenberg in computer science department at the University of Calgary, Canada.http://www.cpsc.ucalgary.ca/grouplab/phidgets/gallery/
Camarata, Kennith Allen. Navigational blocks : an interplay between the physical andthe virtual. NA25 Th50287. Thesis (M. Arch.)--University of Washington, 2001.
Camarata, K., Gross, Mark D., Do, Ellen Yi-Luen. “Navigational Blocks: navigatinginformation space with tangible media.” In Proc. of ACM Conference on Intelligent UserInterfaces (2002).
Dewey, D. and Patera, A. “Geometry-defining processors for partial differential equa-tions.” In B. Alder, editor, Special Purpose Computers, pp. 67-96. Academic Press, 1988.
Eisenberg, M. and Gross, M. “Computationally-Enhanced Construction Kits: integratingtangible and computational media for construction and design.” 2003. Construction kitscan play an educational role for students. The added feature of computationally enhancedconstruction kits can further the educational strengths by adding feedback, advice andadditional data.
85
Esposito, C., Paley, W. B., and Ong, J. “Of mice and monkeys: A specialized input devicefor virtual body animation.” In Proc. of Symposium on Interactive 3D Graphics,Monterey, California (Apr. 1995): 109-114, 213.
Frazer J. H.———. “Use Of Simplified Three-Dimensional Computer Input Devices To Encourage
Public Participation In Design”, Proc. Computer Aided Design 82, ButterworthScientific, 143-151, 1982.
———. An Evolutionary Architecture, Architectural Assoc. 1995.
Greenberg, S. and Fitchett, C. “Phidegts: Easy development of physical interfaces throughphysical widgets.” In Proc. of the ACM UIST 2001 Symposium on User Interface Softwareand Technology, November 11-14, Orlando, Florida. ACM Press. www.cpsc.ucalgary.ca/grouplab/papers/ http://Phidgets.com
Greenberg, S. and Boyle, M. “Customizable physical interfaces for interacting withconventional applications.” Video Proceedings of the ACM UIST 2002 15th AnnualACM Symposium on User Interface Software and Technology. ACM Press.
Gorbet, M., and Orth, M. “Triangles: Design of a Physical/Digital Construction Kit.” InProc. of the Symposium on Designing Interactive Systems 1997: 125-128. This paperdescribes the design process and philosophy behind developing a new computationalconstruction kit as a computer interface, the Triangles project.
Kitamura, Y., Itoh, Y., Masaki, T., Kishino, F. “ActiveCube: a bi-directional user interfaceusing cubes.” In Proc. KES 2000: Fourth International Conference on Knowledge-BasedIntelligent Engineering Systems & Allied Technologies. Aug. 30 - Sep. 1, 2000: 99-102.Kitamura et al. designed a cube interface that interacts with a computer interface. Thedesigner can manipulate the physical cube, or change the cube through the computerinterface.
Lackner, T., Dobson, K., Rodenstein, R., and Weisman, L. Sensory Puzzles. Traditionaljigsaw puzzles off an engaging visual stimulus. However, by employing multiple senses -hearing, touch, and vision - the user experiences an enriched, interaction, especially thosewith various sensory abilities.
86
Lertsithichai, S. and Seegmiller, M. “CUBIK: A bi-directional tangible modeling interface.” InProc. of the Conf. of Human Factors in Computing Systems, CHI 2002: 756-757.
Martin, Fred. Robotic Explorations: A Hands-On Introduction to Engineering. UpperSaddle River, New Jersey : Prentice-Hall, Inc. 2001. TJ211 .M36645 2001.
Raffle, H., Parkes, A. and Ishii, H. “Topobo: A constructive assembly system with kineticmemory.” In Proc. of the ACM CHI 2004, April 24-29, Vienna, Austria, ACM Press.www.tangible.media.mit.edu/. 2003
Sharlin, E., Itoh, Y., Watson, B., Kitamura, Y., Sutphen, S., Liu, L. “Cognitive Cubes: atangible user interface for cognitive assessment.” In Proc. CHI 2002, Apr. 20-25, 2002,Minneapolis, Minnesota. 2002. Cognitive Cube offers an alternative to standard paper-and-pencil testing of 3D spatial skills.
Sutphen, S., Sharlin, E., Watson, B., Frazer, J. “Reviving a Tangible Interface Affording3D Spatial Interaction.” What are the qualities of a successful tangible interface? Discus-sion focuses on the Segal model, designed by John Frazer and his colleagues over twodecades ago.
Weller, Philetus Mike. “Espressocad: a System to Support the Design of Dynamic StructureConfiguration.” In proc. of Generative CAD 2004, June 12-15, Philadelphia, Pennsylvania.
Weller, Philetus Mike, Gross, Mark D., Do, Ellen Yi-Luen. Espresso blocks : self-configuringbuilding blocks. NA25 Th53054. Thesis (M. Arch.)--University of Washington, 2003.
Wrensch, T. and Eisenberg, M. “The Programmable Hinge: toward Computationally En-hanced Crafts.” In Proc. of UIST 1998, November, San Francisco, California, pages 89-96.
87
PRODUCTS AND SOFTWARE
“Castle Island’s Worldwide Guide to Rapid Prototyping.”http://home.att.net/~castleisland/. Article on rapid prototyping.
Catia modeling software. www.catia.ibm.com
Greenberg, S. and Fitchett, C. “Phidgets: Easy development of physical interfacesthrough physical widgets.” In Proc. of the ACM UIST 2001 Symposium on User InterfaceSoftware and Technology, Nov. 11-14, Orlando, Florida. ACM Press.www.cpsc.ucalgary.ca/grouplab/papers/
Gross, M. “FormWriter: A Little Programming Language for Generating Three-DimensionalForm Algorithmically.” In Proc. of CAAD Futures 2001, Eindhoven, 8-11 July 2001: 577-588.
Kiryakoza, Steven. “The LOGO Programming Language”. website, 1997.http://www.engin.umd.umich.edu/CIS/course.des/cis400/logo/logo.html
http://llk.media.mit.edu/projects/cricket/about/index.shtmlCricket interface is a unified electronics kit allows one to build various electronicprojects. This is similar to LEGO(tm) Mindstorms. The initial concept model with a flexsensor utilized the Cricket Serial-IR interface. The Cricket communicates at 9600 baudwith the host computer, running on a 9v battery. www.gleasonresearch.com.
Persistence of Vision Raytracer (POV-Ray). http://povray.orgThis 3D software allows designers to create ray-traced images through the power ofscript. The programming language can be utilized to create parametrically based designsthat can be animated.
PGCE IT LOGO website. May 2003. http://www.pgce.soton.ac.uk/it/logo/.Website dedicated for LOGO programming language.
88
www.Phidgets.comImage from www.cim.mcgill.ca/~jer/research/phidgets/projlab/images/phidget.jpg
Shape Tape(tm) is produced under the license of the Canadian Space Agency byMeasurand. http://www.measurand.com/products/shapetape.html
http://www.tekcad.com/. TekCAD Pro. is an engineering software that integrates finiteelement methods (engineering) into the design environment, through allowing the user tocreate and manipulate complex geometric structures.
toylist1.html. This is an extensive list of construction toys with the architecturalspirit in mind.
———. Froebel image from Architoys.net. http://www.architoys.net/toys/toypages/froebel.html
http://www.chem.sunysb.edu/msl/LEGO/logs.html. Lincoln Logshttp://www.chem.sunysb.edu/msl/lego/llog_5.jpg. Lincoln Logs image.
“ERECTOR SET.” The Great Idea Finder.http://www.ideafinder.com/history/inventions/erectorset.htm
Long, Eric. http://www.si.edu/lemelson/centerpieces/ilives/images/hoberman2.gif. Imageof a child playing with the Hoberman sphere.
89
Watson, B. Fröbel Gifts and Blocks. 1997. http://www.geocities.com/Athens/Forum/7905/fblinflc.html. This website covers how contemporary children’s building block wasdeveloped by the pedagogue Friedrich Fröbel.
Watson, Bruce. the Man Who Changed How Boys and Toys Were Made: the life and timesof A.C. Gilbert, the Man Who Saved Christmas. Penguin, 2002
Wetzel, George. Erector set image from: http://www.architectoys.com/covers_gif/72thumb.jpg
Figure 103. Electronic and Computational construction kits.
93
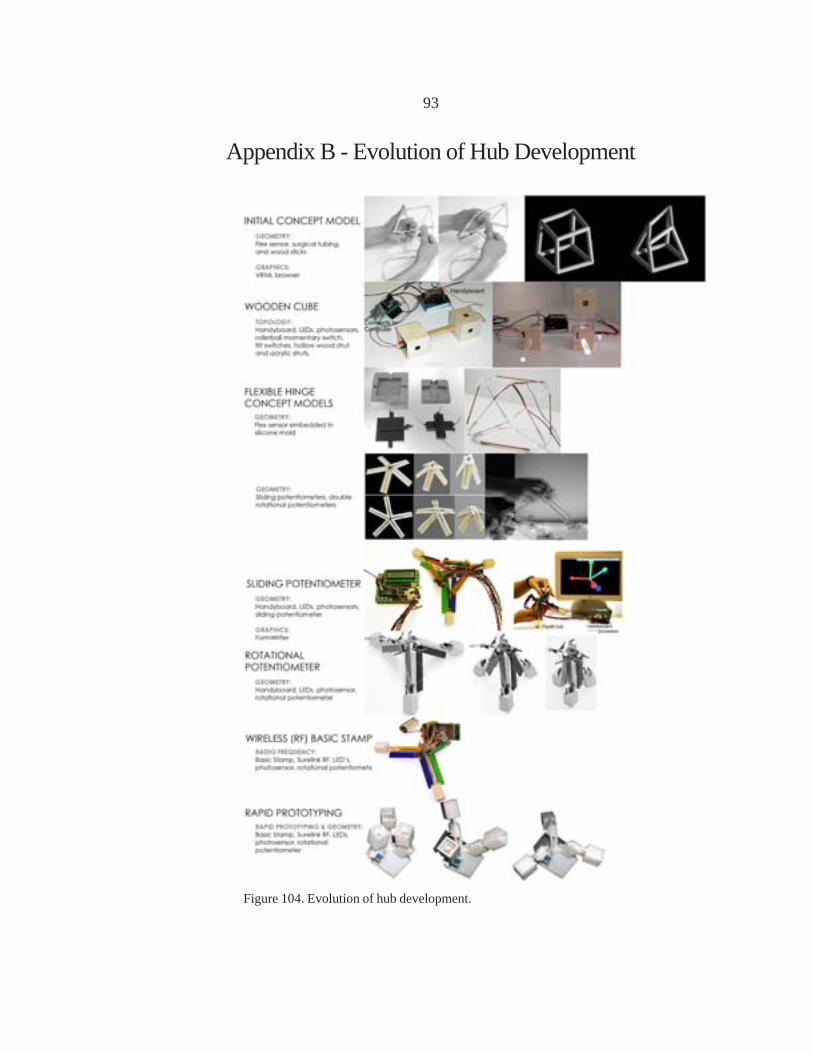
Appendix B - Evolution of Hub Development
Figure 104. Evolution of hub development.
94
Appendix C - List of Materials
Acrylic Strut .5" SquarePurchased at Clear Cut Plastics Inc. (www.clearcutplastics.com)507 North 36th Street, Seattle, WA 98103.
BasicStamp Microprocessor (BasicStamp 2 module)Purchased at Parallax, Inc. (parallax.com), stock number BS2-IC.Package: BS2-ICPackage Size (L x W x H): 1.2"x0.6"x0.4"Environment: 0o - 70oC* (32o - 158o F) **Microcontroller: Microchip PIC16C56cProcessor Speed: 20 MHzProgram Execution Speed: ~4,000 instructions/sec.RAM Size: 32 Bytes (6 I/O, 26 Variable)Scratch Pad RAM: N/AEEPROM (Program) Size: 2K Bytes, ~500 instructionsNumber of I/O pins: 16 +2 Dedicated SerialVoltage Requirements: 5 - 15 vdcCurrent Draw @ 5V: 8 mA Run / 100µA SleepSource / Sink Current per I/O: 20 mA / 25 mASource / Sink Current per unit: 40 mA / 50 mA per 8 I/O pinsPBASIC Commands: 36PC Programming Interface: Serial Port (9600 baud)
CricketThe Cricket is based on the Microchip PIC series of microprocessor. User programsare downloaded to the Cricket via its infrared communications system. TheCricket has a button that when pressed triggers it to run the program that wasdownloaded to it. LEDs on the Cricket indicate when it is running a program orsitting idle, the state of the two motor outputs, and indication of infrared transmission.
The Cricket grew out of Fred Martin's work with Programmable Bricks. TheCricket project has had many contributors, but has been primarily created by FredMartin, Brian Silverman, Bakhtiar Mikhak, and Robbie Berg.
* Surface-mount 16F84 CPU @ 1 MHz * Two 1A, 9v motor outputs
95
* Two resistive sensor inputs * 600 baud IR communications * 2048 bytes of user memory (1792 program, 256 data) * Beeper, pushbutton, LEDs
HandyBoard microcontroller systemThe Handy Board is based on the 52-pin Motorola MC68HC11 processor, andincludes 32K of battery-backed static RAM, four outputs for DC motors, aconnector system that allows active sensors to be individually plugged into theboard, an LCD screen, and an integrated, rechargable battery pack.
Information at www.handyboard.comPurchased at www.gleeson.com
LED (500TSW4D Super White)500TSW4D InFaN Super White (15 degrees) - Bin 3b9,300 millicandellaBest and brightest T1 3/4 water clear 5mm white led lamp. Color: InGaN white.Intensity: 8 cd (typical)at 3.3V. Viewing angles: 15 Deg. Solder leads with stand-off. For optimal colorization and intensity (9.3 cd), forward voltage of 3.3V isrecommended.
The brightness of LEDs is measured in millicandela (mcd), or thousandths of acandela. Indicator LEDs are typically in the 50 mcd range; "ultra-bright" LEDscan reach 15,000 mcd, or higher (the 617 nm Luxeon Star (part number LXHL-NH94) can reach 825,000 mcd)
Purchased at Unitech Systems Inc. / LC LED Inc. (www.lc-led.com)
Mercury Tilt Switch
Photosensor (Photocell, 0.27" x 0.24")100 ohms - light. 50K - dark.0.27" x 0.24" plastic encapsulated ceramic package. 1.5" leads.
Purchased at All Electronics Corporation (www.allelectronics.com),catalogue number PRE-22.
Rotational Potentiometer (100K Linear PC Mount Potentiometer)100K resistance. Linear taper. Center detention 6mm diametershaft, no threaded bushing.
Purchased at All Electronics Corporation (www.allelectronics.com),catalogue number LPT-100K.
Silicone Rubber (Oomoo 25)Easy to use silicone rubber compound that features one-to-one by volume mixratio (no scale necessary). Has a low viscosity for easy mising and pouring. Potlife 15 minutes. Demold in 75 minutes. Color: light blue.
Purchased at Smooth-On, Inc. (www.smooth-on.com)
Sliding Potentiometer (50K Linear Slide Potentiometer, 2.9" long)50 K. Linear taper. 2.9" log. 2" travel.
Purchased at All Electronics Corporation (www.allelectronics.com),catalogue number LSP-50KL.
SureLink RF Transceiver (SureLink 900 MHz RF Module* Data DTE transfer rates of 1200 Baud to 115k Baud* RF Transfer rates from 48000 bps to 76.8 kbps* Range up to 1000 feet (dependent upon environment)* Scratch pad flash memory of 128 bytes* Long battery life of up to 5 hours of operation* 16 run-time selectable channels* Data Encryption mode allows you to send data discreetly (128-bit key code)* Built-in error correction for all data transmissions* Free PC software available.
Purchased at Parallax, Inc. (parallax.com), stock number 30065.
97
Appendix D - Cricket Interface Code
Figure 105. Cricket GUI with program (screen shot). The Cricket Logo code loops through checking thesensor and then waiting .4 seconds.
98
property showing : ""set sPort to ""loadbrowser()
tryset sPort to open serial port "printer port usb" baud rate 9600repeat
set ch to serial port read sPort for 1if ch - "" then
set value to ASCII number (last character of ch)if value < 10 then --55
IEPage(0)else if value < 14 then --60
IEPage(5)else if value < 16 then --70
IEPage(15)else if value < 20 then --75
IEPage(30)else if value < 30 then --80
IEPage(60)else if value < 40 then --85
IEPage(75)else if value < 50 then --90
IEPage(90)else if value < 65 then --110
IEPage(105)else if value < 80 then --115
IEPage(120)else if value < 110 then --125
IEPage(120)else if value < 180 then --140
IEPage(150)else if value < 255 then --150
IEPage(170)else if value < 180 then
IEPage(180)end if
elseend if
end repeatclose serial port sPort with waitingset sPort to ""
on error theErr number errNum
Appendix E - AppleScript Code for Web Browser
99
if sPort is not "" thenclose serial port sPort
end ifreturn "ERROR:" & theErr & "---" & errNum
end try
on loadbrowser()tell application " Internet Explorer"
Activateset defaultPage to ("file:///thalamus/arch504/FlexM/html/
default.html")GetURL defaultPage
end tellend loadbrowser
on IEPage(html)tell application " Internet Explorer"
set htmlPage to ("file:///thalamus/arch504/FlexM/html/" &html & ".html")
GetURL htmlPageend tell
end IEPage
100
/*file name: cube_topology.ic author: Markus Eng date created: May 4, 2003 revision date: February 9, 2004*/
int NO_OF_HUBS = 4; // there are only four motor portsint NO_OF_SENSORS = 4;int LED_OFF = 0;int LED_LOW = 15;int LED_HIGH = 25;int LIGHT_ON_THRESHOLD = 18; // analog threshold for high intensity LED.int SENSOR_PORT[4][4]; // hold sensor port #sint motor_ports[4];int CONNECTIONS[5][5]; // topology connections, n= NO_OF_HUBS
// hub1 red C = 5 // orange D = 6 // black E = // hub2 blue 5 = 20 // red 4 = 21 // orange 6 = 19 // hub3 red 1 = 24 /// blue 2 = 25 // green 3 = 26 checkHubs(); // initialize with turn on light in each hub
// and see if any other blocks can see it printf("\n\n ****Waiting****");
while (1) { // after checking hubs, // wait for input from serial port
printf("\n Waiting "); if (serial_getchar(serial_ignore)) { // acknowledge receiving character from host // computer application printf("\n Received %d", serial_ignore); checkHubs(); printf("\n finished checking hubs"); sleep( 3.0 ); disable_pcode_serial(); }}}
void reset() { // Shuts off LEDs (motor ports) and clears theLCD screen int lightHub; // Sending Hub for (lightHub = 1; lightHub < NO_OF_HUBS; lightHub++ ) { motor( lightHub, LED_OFF ); // Shuts off light in hub } printf("\n\n"); // Clears the 1st line on the LCD}
102
void checkHubs() { // Turns on light in each hub & // checks if any of other hubs can see it
int lightHub, sensorHub;
// Sending Hub, Receiving Hub, Socket loop through cubes, check // whether they are attached to any other cubes
for (lightHub=1; lightHub < NO_OF_HUBS; lightHub++){ motor(lightHub, LED_LOW ); // Turns on light in hub printf( "\n"); // Clears display
// Displays which hub is on (lighthub) printf( "\n Hub %d on: ", lightHub);
// allow a latency time for the light to register sleep(BRIEFLY);
// Checks whether all the other cubes can see the lightHub sensorHubs(lightHub); motor(lightHub, LED_OFF ); // turn off light in hub sleep(BRIEFLY); } sendConnections(); send_Angles(); // Send the angle data from the hub printf("\n all hubs checked"); // Clear 1st line LCD}
int sensorHubs (int lightHub) { // given a lighted hub (lightHub), loops thru all hubs, // printing when the hub sees the lighted hub.
int sensorHub, sensorFace, socketNode; for ( sensorHub=1; sensorHub < NO_OF_HUBS; sensorHub++ ){ if ( sensorHub != lightHub) { // printf("\n\n**SENSING HUB %d", sensorHub); sensorFace = readHub( sensorHub );
// If socket sees light, return the socket# if (sensorFace > 0){ CONNECTIONS[lightHub][sensorHub]=sensorFace; }}}}
103
int readHub(int thisHubPort) { // check whether this hub can see the light
int sensorCount, lightVal;
// for each face in the hub for (sensorCount=1; sensorCount < NO_OF_SENSORS; sensorCount++) { // thisHubPort]!= sensorHub lightVal = analog(SENSOR_PORT[thisHubPort][sensorCount]); if (lightVal > 0) // this list the sensor readings independent // of connection (ambient lighting) printf("\n%d face %d hub %d", lightVal, sensorCount, thisHubPort); printf("\n");
// if the anlog port reads the light, if ((lightVal > 0) && (lightVal < LIGHT_ON_THRESHOLD)) { return sensorCount; }} return -1; // no light}
int sendConnections (){ // converts the triplets to 4-tuples: lightHub, lightSocket, // sensorSocket, sensorHub
// i=lightHub, j=sensorHub, SensorHub socket, lightHub socket int i, j, s1, s2; int n = NO_OF_HUBS + 1;
for (j=0; j<n; j++) { for (i=0; i<n; i++) { s1 = CONNECTIONS[i][j]; s2 = CONNECTIONS[j][i]; if ((s1*s2) != 0) { CONNECTION_LIST[0][0]=i; CONNECTION_LIST[0][1]=s2; CONNECTION_LIST[0][2]=s1; CONNECTION_LIST[0][3]=j; printf("\n (%d %d %d %d)", i, s2, s1, j);
104
// delimiter: starting connection node in LISP serial_putchar(connection_del); serial_putchar(i); // send lightHub serial_putchar(s2); // send lightHub socket serial_putchar(s1); // send sensorHub socket serial_putchar(j); // send sensorHub }}} serial_putchar(155); // delimeter: no more connections to send}
int send_Angles() { // cycles through hubs (i) and sends the 3 angles per hub
int i, j, angle_port, angle_value;
for (i=1; i<NO_OF_HUBS; i++) { serial_putchar(angle_del); // delimiter: start of angle packets serial_putchar(i); // Hub number for (j=1; j<NO_OF_SENSORS; j++) { angle_port = SENSOR_PORT[i][j] + 3; if (angle_port > 3) { angle_value = analog (angle_port);
// angle value connecting the sockets serial_putchar(angle_value); printf("\n\n Hub %d <%d %d", i, j, angle_value); }}} serial_putchar(155); // delimeter: end of angle packets}
void disable_pcode_serial() /* necessary to rcv chars using serial_getchar */{ poke(0x3c, 1);}
int serial_getchar(int c){ // printf("\n Serial Port open"); while (!(peek(0x102e) & 0x20)); /* wait for received character */ return peek(0x102f);}
105
Appendix G - Synchronization of Hub Communication
Table 3. This table measures how timeout periods (column B) and pauses between operations in the PBasiccode (column C) affect the communication efficiency between the base station and the hub. I tracked numberof commands sent (column D), acknowledgements from the other party (column E), timeout periods(column F) and lost connections (column G). From this data I deduce that longer intervals for timeouts andpauses for both the base station and the hub yield the best success in sending/receiving data asynchronously.Likewise, briefer intervals correspond to less success.
column H = received/sent - time_out/sent - no_link/sent column P = received/sent - time_out/sent - no_link/sent Best case scenario: H=1, worst case H=-2.
Index = column H + column P Best case: Index=2, worst case Index=-4
106
Appendix H - Flowchart of PBasic Code for theBasicStamp 2 Base Station
Figure 106. Flowchart for BasicStamp 2 base station code - part 1.
107
Figure 107. Flowchart for BasicStamp 2 base station code - part 2
108
Appendix I - Flowchart of PBasic Codefor the BasicStamp 2 Hub
Figure 108. Flowchart for BasicStamp 2 hub code.
109
'{$STAMP BS2}'{$pbasic 2.5}' File......SureLink_pointA.BS2' Purpose...Demo data transmission with two Surelink Modules' Author....Parallax
'----[ i/o def]---link PIN 15dout PIN 7din PIN 0
'----[constants]---baud CON 84+$4000LED_on CON 10LED_off CON 11poll_hub CON 12power_off CON 15briefly CON 1500
last_hub CON 4 ' four hubslast_sensor CON 6 ' six sensors 1-3 (LEDs), 4-6 (pots)
'----[variables]---x VAR Byteackn VAR Bytesensor VAR Bytehub_light VAR Nibcheck_hub VAR Nib
'----[initialization]---Initialize: PAUSE 250 HIGH 7
Appendix J - PBasic BasicStamp 2 Base Station Code
110
'----[program code]---Main: GOSUB Check_link FOR hub_light = 1 TO last_hub ' cycle through the 4 hubs SEROUT dout, baud, [hub_light] ' contact the hub (1-4) DEBUG CR, "Waiting for ackn from hub ", DEC hub_light PAUSE briefly GOSUB Get_ackn ' wait for a response back from hub_light IF (ackn = hub_light) THEN ' verify the right hub responded SEROUT dout, baud, [LED_on] ' send a "10" to turn on the light. DEBUG CR, "Hub ", DEC hub_light, " is ON." PAUSE briefly GOSUB Check_hubs ENDIF SEROUT dout, baud, [LED_off] NEXT DEBUG CR, "All hubs checked."
Check_link: IF link = 0 THEN No_link DEBUG CR, "linked" RETURN
Check_hubs: FOR check_hub = 1 TO last_hub ' cycle through all the hubs, IF (check_hub <> hub_light) THEN ' except the hub_light ' contact hubs other than hub_light SEROUT dout, baud, [check_hub] PAUSE 2000 GOSUB Get_ackn ' wait for response from check_hub IF (ackn = check_hub) THEN DEBUG CR,"got response from", DEC check_hub GOSUB Poll_hub_sensor ENDIF ENDIF NEXT RETURN
Poll_hub_sensor: SEROUT dout, baud, [poll_hub] ' send instruction to poll hub's sensors DEBUG CR, "sending poll request" PAUSE briefly FOR sensor = 1 TO last_sensor SERIN din, baud, 500, nodata, [x] ' read the 6 sensor values PAUSE 100 DEBUG DEC x, TAB NEXT RETURN
No_link: DEBUG "no link", CR PAUSE briefly RETURN
Nodata:DEBUG CR, "- "GOTO main
112
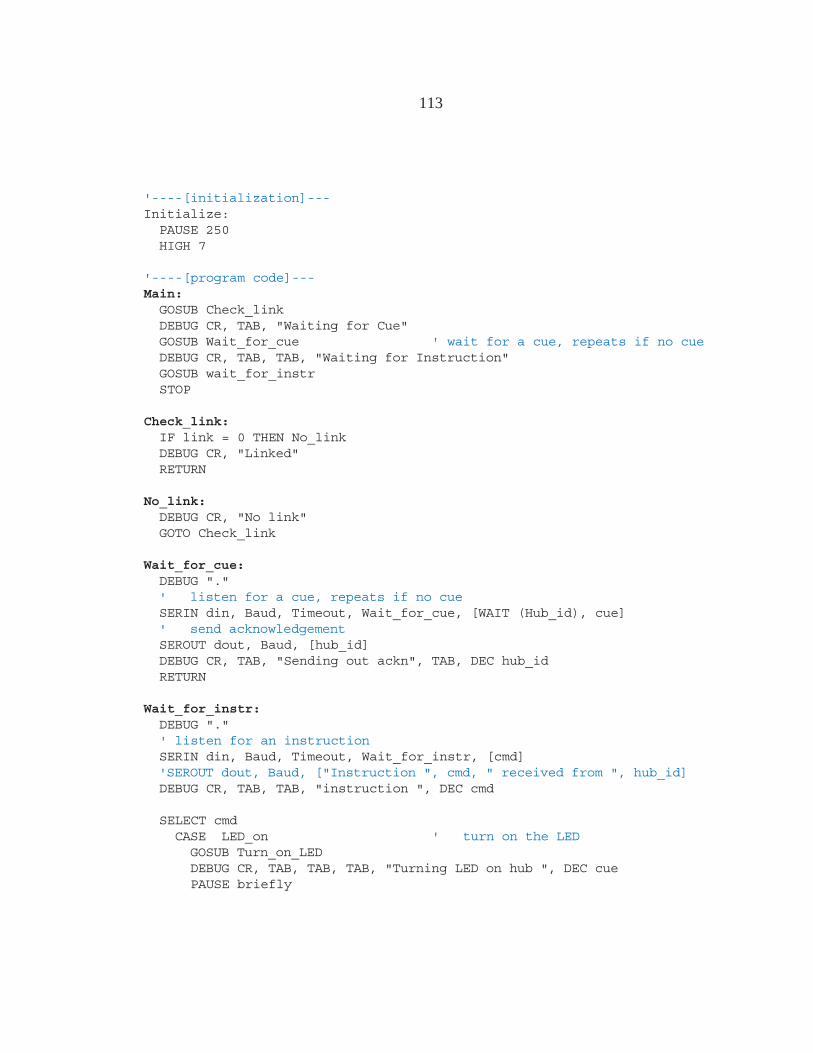
Appendix K - PBasic BasicStamp 2 Hub Code
'{$STAMP BS2}'{$pbasic 2.5}'{$PORT COM2}' File......SureLink_pointB.BS2' Purpose...Demo data transmission with two Surelink Modules' Author....Parallax
'----[constants]---Baud CON 84+$4000Timeout CON 1500Hub_id CON 2 ' hub identifierLED_port CON 12 ' LED port connectionLED_on CON 10LED_off CON 11Poll_hub CON 12Power_off CON 15Briefly CON 1500
'----[variables]---cue VAR Nib ' calling cue fromcmd VAR Bytex VAR Bytesensor VAR Bytesensor_val VAR ByteInstr_msg VAR Byte
113
'----[initialization]---Initialize: PAUSE 250 HIGH 7
'----[program code]---Main: GOSUB Check_link DEBUG CR, TAB, "Waiting for Cue" GOSUB Wait_for_cue ' wait for a cue, repeats if no cue DEBUG CR, TAB, TAB, "Waiting for Instruction" GOSUB wait_for_instr STOP
Check_link: IF link = 0 THEN No_link DEBUG CR, "Linked" RETURN
No_link: DEBUG CR, "No link" GOTO Check_link
Wait_for_cue: DEBUG "." ' listen for a cue, repeats if no cue SERIN din, Baud, Timeout, Wait_for_cue, [WAIT (Hub_id), cue] ' send acknowledgement SEROUT dout, Baud, [hub_id] DEBUG CR, TAB, "Sending out ackn", TAB, DEC hub_id RETURN
Wait_for_instr: DEBUG "." ' listen for an instruction SERIN din, Baud, Timeout, Wait_for_instr, [cmd] 'SEROUT dout, Baud, ["Instruction ", cmd, " received from ", hub_id] DEBUG CR, TAB, TAB, "instruction ", DEC cmd
SELECT cmd CASE LED_on ' turn on the LED GOSUB Turn_on_LED DEBUG CR, TAB, TAB, TAB, "Turning LED on hub ", DEC cue PAUSE briefly
114
CASE LED_off ' turn off the LED GOSUB Turn_off_LED DEBUG CR, TAB, TAB, TAB, "Turning LED off hub ", DEC cue PAUSE briefly
CASE Poll_hub ' poll the hub sensors GOSUB Poll_sensors DEBUG CR, TAB, TAB, TAB, "Polling sensors hub ", DEC cue PAUSE briefly
CASE Power_off ' turn off the power END DEBUG CR, TAB, TAB, TAB, "Power off hub ", DEC cue PAUSE briefly
CASE Hub_id GOTO Wait_for_instr DEBUG CR, TAB, TAB, TAB, "Just my ID ", DEC cue PAUSE briefly
CASE ELSE DEBUG CR, TAB, TAB, TAB, "Unrecognized command: ", DEC cmd DEBUG CR, TAB, TAB, TAB, "Resetting hub." PAUSE briefly GOTO main ENDSELECT GOTO main
Turn_on_LED: TOGGLE LED_port DEBUG CR, TAB, TAB, TAB, TAB, "Hub ", DEC hub_id, " light is ON" PAUSE briefly RETURN
Turn_off_LED: TOGGLE LED_port DEBUG CR, TAB, TAB, TAB, TAB, "Hub ", DEC hub_id, " light is OFF" PAUSE briefly RETURN
115
Poll_sensors: DEBUG CR, TAB, TAB, TAB, TAB, "Sensors 1-6" FOR sensor=1 TO 6 ' Cycle through ports 1-6 for sensor readings. HIGH sensor RCTIME sensor, 1, sensor_val ' Measure RC charge time. SEROUT dout, Baud, [sensor_val] DEBUG CR, TAB, TAB, TAB, TAB, "Sensor ", DEC sensor, ": ",
DEC sensor_val PAUSE briefly NEXT RETURN
116
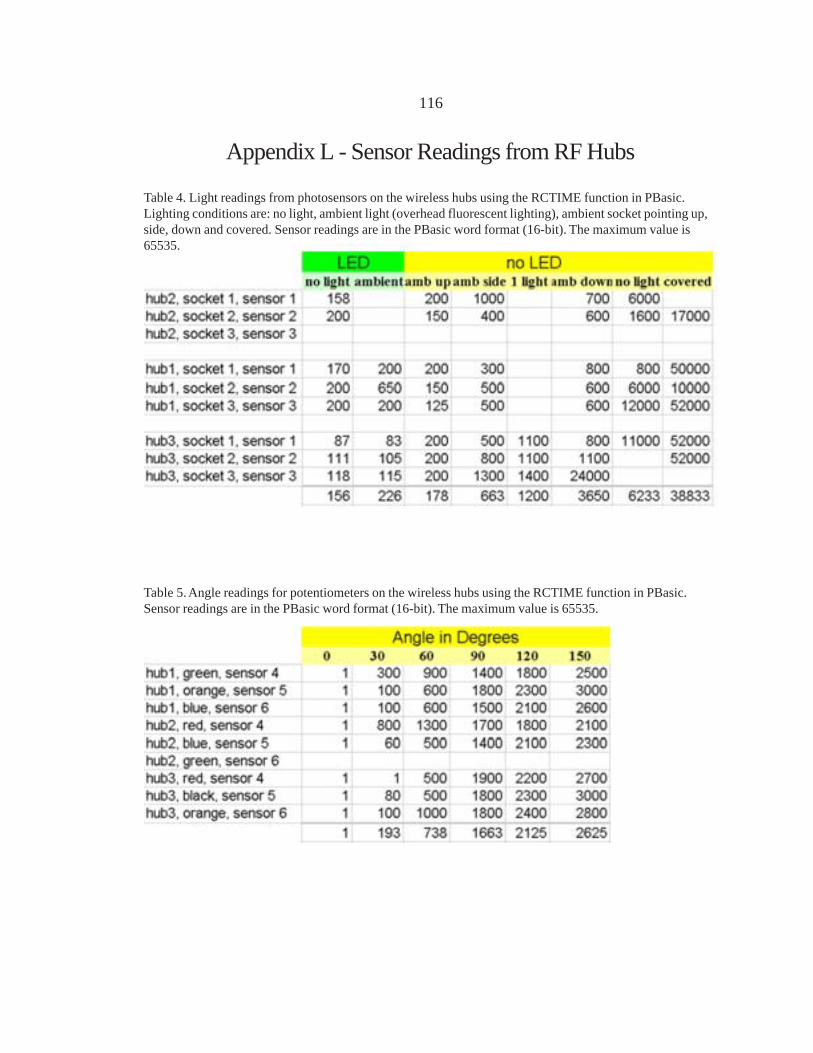
Appendix L - Sensor Readings from RF Hubs
Table 4. Light readings from photosensors on the wireless hubs using the RCTIME function in PBasic.Lighting conditions are: no light, ambient light (overhead fluorescent lighting), ambient socket pointing up,side, down and covered. Sensor readings are in the PBasic word format (16-bit). The maximum value is65535.
Table 5. Angle readings for potentiometers on the wireless hubs using the RCTIME function in PBasic.Sensor readings are in the PBasic word format (16-bit). The maximum value is 65535.
117
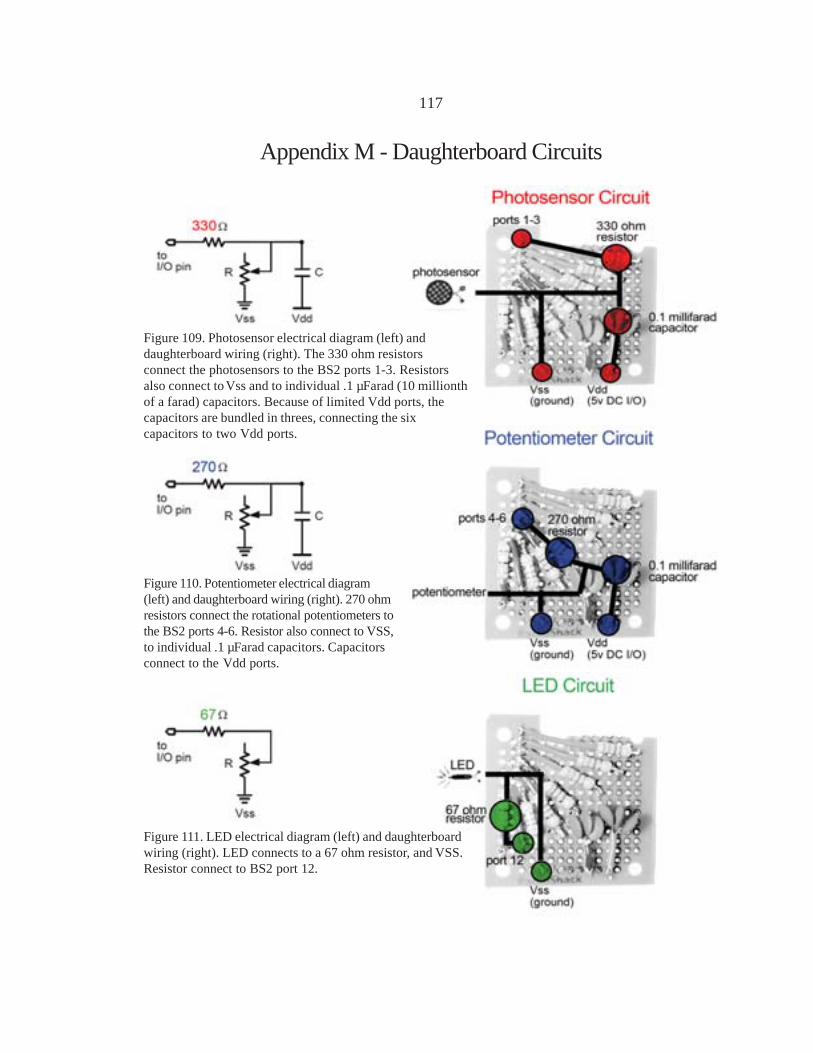
Appendix M - Daughterboard Circuits
Figure 109. Photosensor electrical diagram (left) anddaughterboard wiring (right). The 330 ohm resistorsconnect the photosensors to the BS2 ports 1-3. Resistorsalso connect to Vss and to individual .1 µFarad (10 millionthof a farad) capacitors. Because of limited Vdd ports, thecapacitors are bundled in threes, connecting the sixcapacitors to two Vdd ports.
Figure 110. Potentiometer electrical diagram(left) and daughterboard wiring (right). 270 ohmresistors connect the rotational potentiometers tothe BS2 ports 4-6. Resistor also connect to VSS,to individual .1 µFarad capacitors. Capacitorsconnect to the Vdd ports.
Figure 111. LED electrical diagram (left) and daughterboardwiring (right). LED connects to a 67 ohm resistor, and VSS.Resistor connect to BS2 port 12.
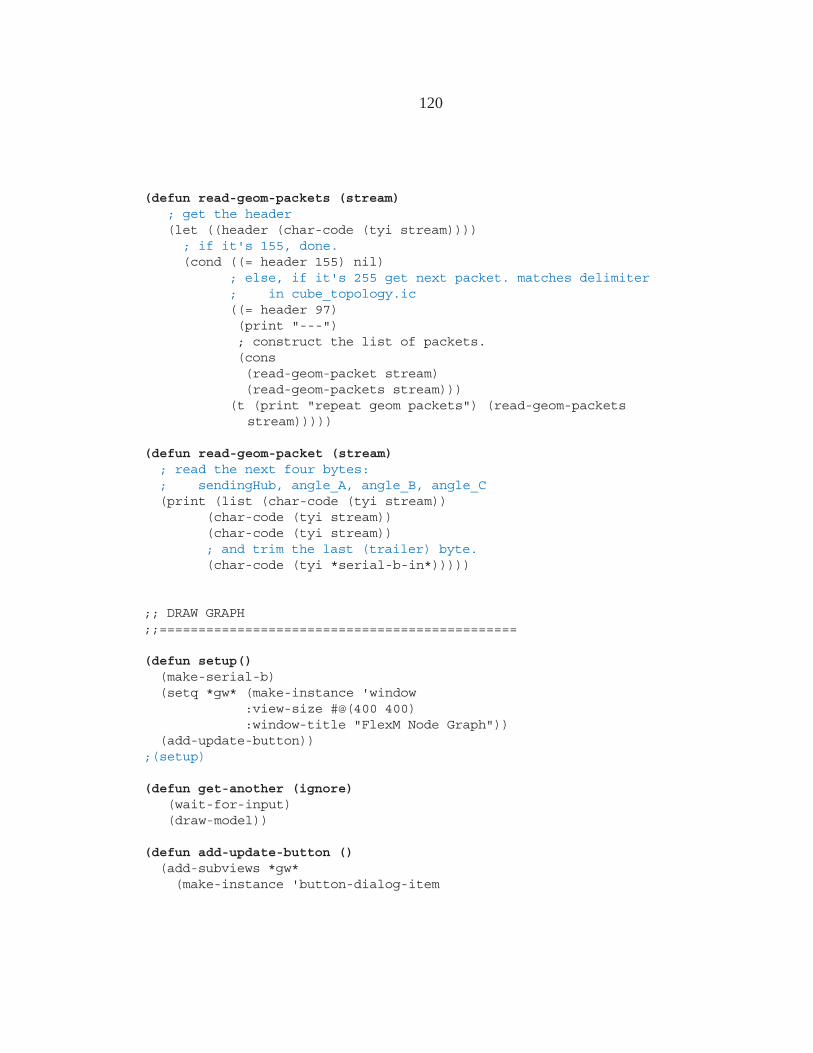
(defun read-geom-packets (stream) ; get the header (let ((header (char-code (tyi stream)))) ; if it's 155, done. (cond ((= header 155) nil) ; else, if it's 255 get next packet. matches delimiter ; in cube_topology.ic ((= header 97) (print "---") ; construct the list of packets. (cons (read-geom-packet stream) (read-geom-packets stream))) (t (print "repeat geom packets") (read-geom-packets
stream)))))
(defun read-geom-packet (stream) ; read the next four bytes: ; sendingHub, angle_A, angle_B, angle_C (print (list (char-code (tyi stream)) (char-code (tyi stream)) (char-code (tyi stream)) ; and trim the last (trailer) byte. (char-code (tyi *serial-b-in*)))))
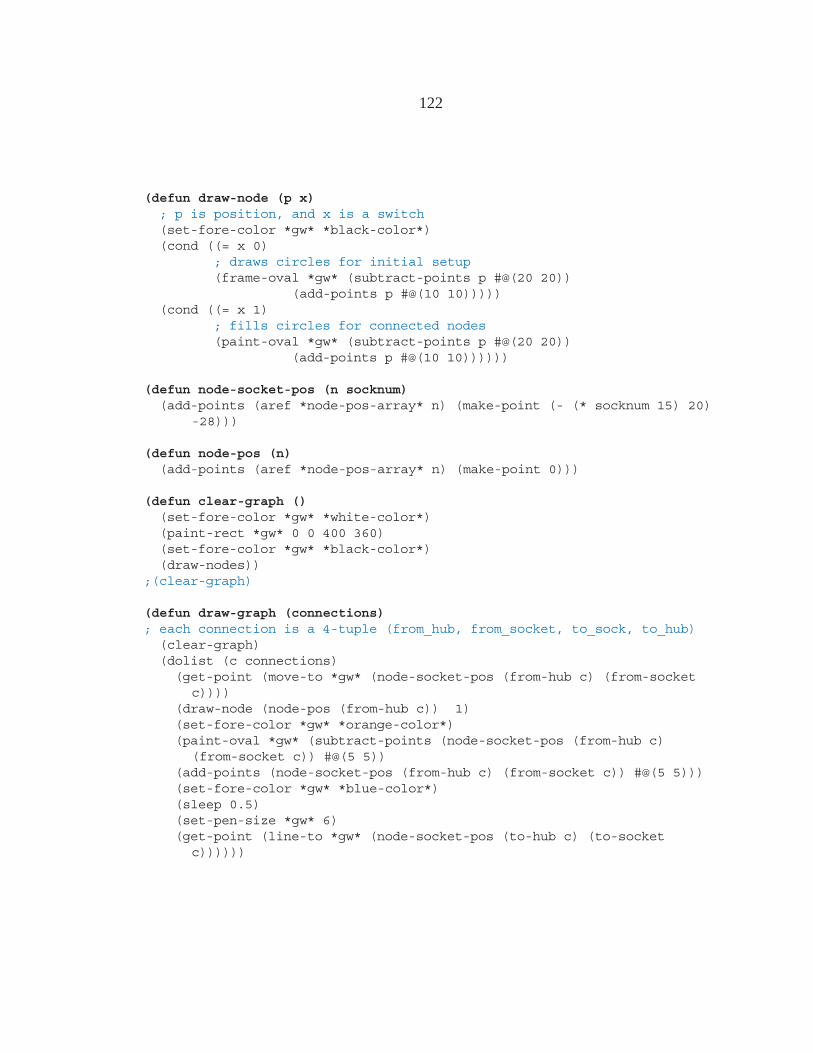
; draw the circles (draw-node nodepos 0) ; draw the three sockets for each circle (dotimes (s 3) (set-fore-color *gw* *orange-color*) (frame-oval *gw* (subtract-points (node-socket-pos n s)
(defun draw-node (p x) ; p is position, and x is a switch (set-fore-color *gw* *black-color*) (cond ((= x 0) ; draws circles for initial setup (frame-oval *gw* (subtract-points p #@(20 20)) (add-points p #@(10 10))))) (cond ((= x 1) ; fills circles for connected nodes (paint-oval *gw* (subtract-points p #@(20 20)) (add-points p #@(10 10))))))
(defun draw-angle-values (angles) ; code is similar to draw-nodes() (dolist (a angles) (dotimes (n 4) (let ((nodepos (aref *node-pos-array* n))) (setq x 0) (cond ((= (elt a x) (+ n 1)) ; draw the three sockets for each circle (dotimes (s 3) ; draw the node numerals (set-fore-color *gw* *orange-color*) (move-to *gw* (add-points #@(-8 -18) (node-angle-pos n s))) (set-view-font *gw* 14) (princ (nth (+ 1 s) a) *gw*))))))))
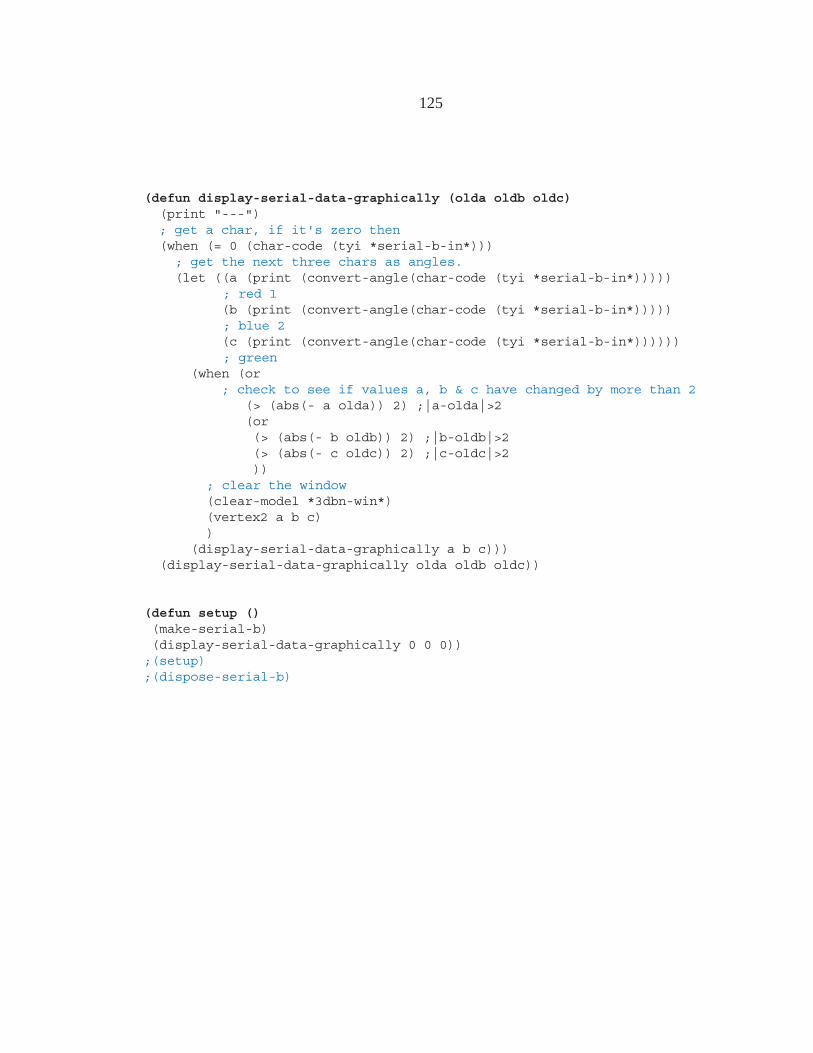
(defun display-serial-data-graphically (olda oldb oldc) (print "---") ; get a char, if it's zero then (when (= 0 (char-code (tyi *serial-b-in*))) ; get the next three chars as angles. (let ((a (print (convert-angle(char-code (tyi *serial-b-in*)))))
; red 1 (b (print (convert-angle(char-code (tyi *serial-b-in*)))))
; blue 2 (c (print (convert-angle(char-code (tyi *serial-b-in*))))))
; green (when (or ; check to see if values a, b & c have changed by more than 2 (> (abs(- a olda)) 2) ;|a-olda|>2 (or (> (abs(- b oldb)) 2) ;|b-oldb|>2 (> (abs(- c oldc)) 2) ;|c-oldc|>2 )) ; clear the window (clear-model *3dbn-win*) (vertex2 a b c) ) (display-serial-data-graphically a b c))) (display-serial-data-graphically olda oldb oldc))
Figure 112. Surelink jumper settings on the control panel.
Figure 113. Surelink com port settings on the control panel.
Appendix P - Surelink Control Panel Configuration
127
Figure 114. Surelink memory configuration on the control panel. This shows the memory configuration for aHub 3 in peripheral mode.
128
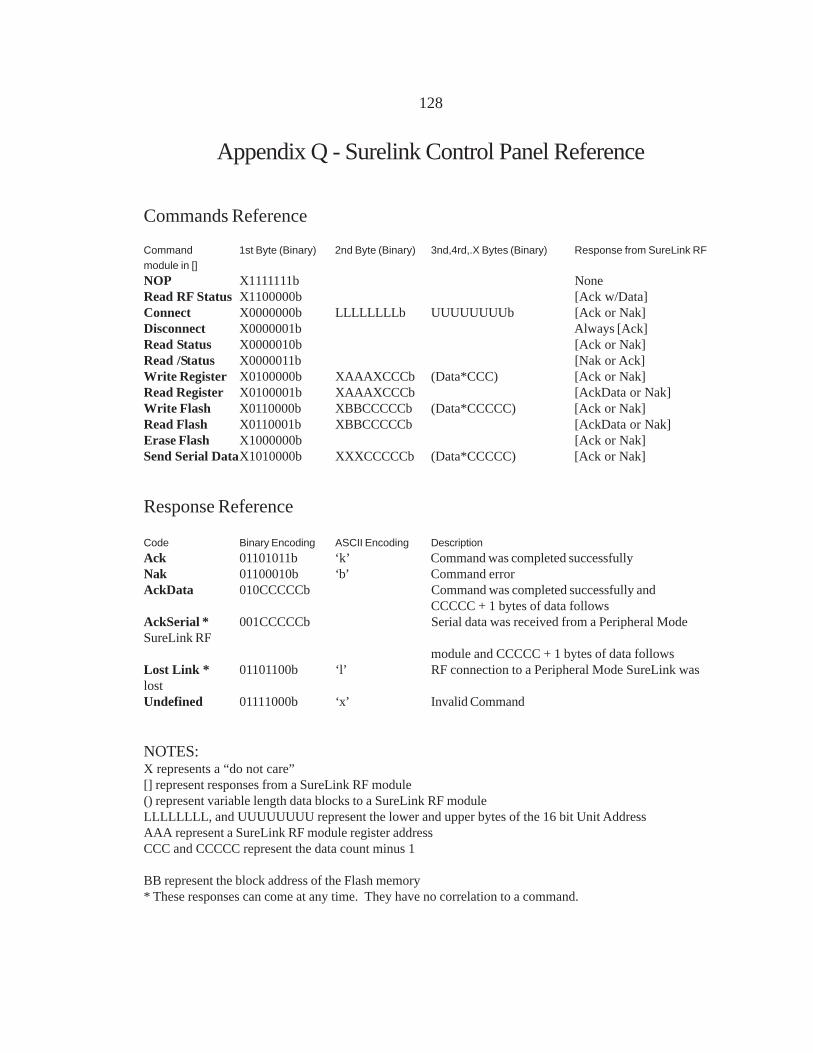
Commands Reference
Command 1st Byte (Binary) 2nd Byte (Binary) 3nd,4rd,.X Bytes (Binary) Response from SureLink RFmodule in []
NOP X1111111b NoneRead RF Status X1100000b [Ack w/Data]Connect X0000000b LLLLLLLLb UUUUUUUUb [Ack or Nak]Disconnect X0000001b Always [Ack]Read Status X0000010b [Ack or Nak]Read /Status X0000011b [Nak or Ack]Write Register X0100000b XAAAXCCCb (Data*CCC) [Ack or Nak]Read Register X0100001b XAAAXCCCb [AckData or Nak]Write Flash X0110000b XBBCCCCCb (Data*CCCCC) [Ack or Nak]Read Flash X0110001b XBBCCCCCb [AckData or Nak]Erase Flash X1000000b [Ack or Nak]Send Serial DataX1010000b XXXCCCCCb (Data*CCCCC) [Ack or Nak]
Response Reference
Code Binary Encoding ASCII Encoding Description
Ack 01101011b ‘k’ Command was completed successfullyNak 01100010b ‘b’ Command errorAckData 010CCCCCb Command was completed successfully and
CCCCC + 1 bytes of data followsAckSerial * 001CCCCCb Serial data was received from a Peripheral ModeSureLink RF
module and CCCCC + 1 bytes of data followsLost Link * 01101100b ‘l’ RF connection to a Peripheral Mode SureLink waslostUndefined 01111000b ‘x’ Invalid Command
NOTES:X represents a “do not care”[] represent responses from a SureLink RF module() represent variable length data blocks to a SureLink RF moduleLLLLLLLL, and UUUUUUUU represent the lower and upper bytes of the 16 bit Unit AddressAAA represent a SureLink RF module register addressCCC and CCCCC represent the data count minus 1
BB represent the block address of the Flash memory* These responses can come at any time. They have no correlation to a command.
Appendix Q - Surelink Control Panel Reference
129
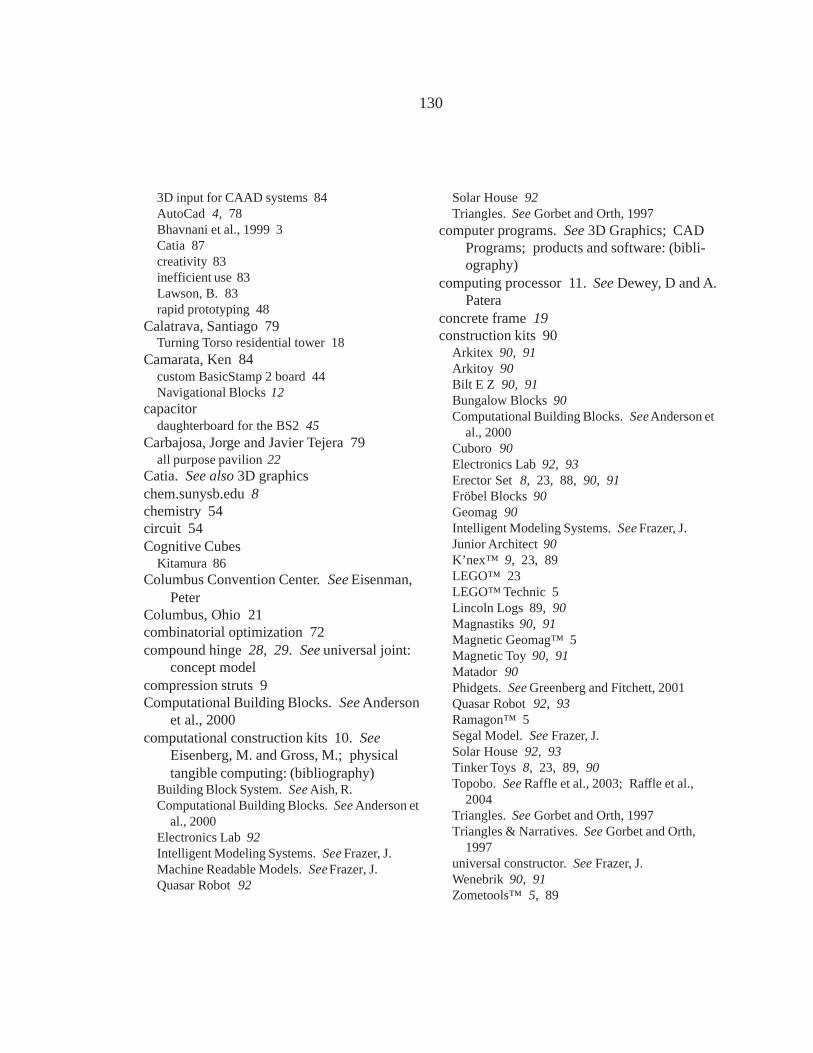
Appendix R - Index
Symbols
3D graphicsCatia 87FormWriter 70FormZ 4POV-Ray 2
A
Abelson, Harold. & diSessa, Andrea 81ABS plastic 48ABS printer 78accordion bus 28, 29acoustics 6acrylic strut 37, 38, 94
index of refraction 81acrylonitrile butadiene styrene. See ABS
plasticActiveCube. See Kitamura et al.,
2000; Sharlin et al., 2002adjacency list 54, 58, 72adjacent (graph theory) 54Aish, R. 84
Building Block System 10ambient light 36, 38analog port
connection diagram to HandyBoard 62, 64Interactive-C programming 61, 63
Anderson et al., 2000 5, 84Computational Building Blocks 14, 77, 92
animate-form. See Lynn, Greg: Embryo HouseAppleScript 55
code for web browser 56, 98arc. See directed edgearchitects
(bibliography) 79Ban, Shigeru 17, 18, 79Calatrava, Santiago 18, 79Eisenman, Peter 18, 79Ferrer, Toro 79Frei, Otto 22, 79Fuller, R. Buckminster 9
Gaudí, Antonio 16, 80Gehry, Frank 16Jorge Carbajosa and Javier Tejera 22Le Corbusier 5, 80Lynn, Greg 14, 80Utzon, Jørn 17, 80Wright, Frank Lloyd 8
architoys.net/toys/toylist1.html 8asynchronous communication 66, 105AutoDesk Architectural Desktop. See CAD
Programs: AutoCad
B
ball and socket 28, 29Ban, Shigeru 79
Japanese Pavilion, Expo 2000 17Barcelona, Spain 16BasicStamp 2 microprocessor
44, 53, 78, 94. See Camarata, Ken:custom BasicStamp 2 board
asynchronous communication 105base station code 112
flowchart 106component in the flexible hub 44diagram for sensor input 45hub code 112node diagram programming 71processor speed 61switching platforms 64
bend sensorconcept model 30, 39
coding 55bending and flexing typologies 28, 29Bhavnani et al., 1999 3, 83
Einstellung effect 4K’nex™ 5
bivalve 28, 29Bobrow, Daniel 70Building Block System. See Aish, R.
C
CAD Programs
130
3D input for CAAD systems 84AutoCad 4, 78Bhavnani et al., 1999 3Catia 87creativity 83inefficient use 83Lawson, B. 83rapid prototyping 48
Calatrava, Santiago 79Turning Torso residential tower 18
Camarata, Ken 84custom BasicStamp 2 board 44Navigational Blocks 12
capacitordaughterboard for the BS2 45
Carbajosa, Jorge and Javier Tejera 79all purpose pavilion 22
Catia. See also 3D graphicschem.sunysb.edu 8chemistry 54circuit 54Cognitive Cubes
Kitamura 86Columbus Convention Center. See Eisenman,
PeterColumbus, Ohio 21combinatorial optimization 72compound hinge 28, 29. See universal joint:
concept modelcompression struts 9Computational Building Blocks. See Anderson
et al., 2000computational construction kits 10. See
Eisenberg, M. and Gross, M.; physicaltangible computing: (bibliography)
Building Block System. See Aish, R.Computational Building Blocks. See Anderson et
al., 2000Electronics Lab 92Intelligent Modeling Systems. See Frazer, J.Machine Readable Models. See Frazer, J.Quasar Robot 92
Solar House 92Triangles. See Gorbet and Orth, 1997
computer programs. See 3D Graphics; CADPrograms; products and software: (bibli-ography)
computing processor 11. See Dewey, D and A.Patera
concrete frame 19construction kits 90
Arkitex 90, 91Arkitoy 90Bilt E Z 90, 91Bungalow Blocks 90Computational Building Blocks. See Anderson et
al., 2000Cuboro 90Electronics Lab 92, 93Erector Set 8, 23, 88, 90, 91Fröbel Blocks 90Geomag 90Intelligent Modeling Systems. See Frazer, J.Junior Architect 90K’nex™ 9, 23, 89LEGO™ 23LEGO™ Technic 5Lincoln Logs 89, 90Magnastiks 90, 91Magnetic Geomag™ 5Magnetic Toy 90, 91Matador 90Phidgets. See Greenberg and Fitchett, 2001Quasar Robot 92, 93Ramagon™ 5Segal Model. See Frazer, J.Solar House 92, 93Tinker Toys 8, 23, 89, 90Topobo. See Raffle et al., 2003; Raffle et al.,
2004Triangles. See Gorbet and Orth, 1997Triangles & Narratives. See Gorbet and Orth,
1997universal constructor. See Frazer, J.Wenebrik 90, 91Zometools™ 5, 89
131
Zoob™ 5, 28, 29Coxeter, 1973 75craft
computationally enhanced. See Wrensch, T. andEisenberg, M.
creativityAnderson et al., 2000 5
Cricket interface 53, 87, 94. See also robot-ics
AppleScript Code 56processor speed 61
Crippa, 2002 16Cromwell, 1997 54cube 75CUBIK. See Lertsithichai and Seegmiller,
2002curtain wall structures 19cycle. See circuitcycle (graph theory) 54
D
daylighting 6DEBUG function. See PBasicdebugging window 66degree (graph theory) 54degree of freedom. See DOFdelimiter
Interactive-C programminggeometry 64topology 63
democoncept model 56
design paradigms 84Dewey, D. and Patera, A 11, 84dihedral angle 75, 82directed edge (graph theory) 54discrete optimization 72dodecahedron 75DOF 27
E
echinoderm 28, 29education and learning theory 83
collaborative learning environments 84creative visualization 84designing and playing 83interaction vs. entertainment 83Nilsen et al., 1993 83spatial skills 86
Einbinder, 1986 5Einstellung effect 4Eisenberg, M. and Gross, M. 85Eisenman, Peter 79
Columbus Convention Center 21St. George Ferry Terminal 18
elbow joint 28, 29Embryo House. See Lynn, GregEngel, Heinrich 19, 79
hypar surfaces 17Erector set. See Gilbert, A. C.Esposito et al., 1995 85
Monkey™ 14Espresso Blocks. See Weller, Mike PhiletusEuler, Leonard 73Eulerian circuit 73exoskeletal bending 28, 29expansion board. See HandyBoard microcon-
trollerExpo 2000 17
F
FDM 48Ferrer, Torro 79Feurzeig, Wallace 70flashlight game 33, 57, 76, 78flexible curve 28, 29flexible joint 27flexible model 1
132
FlexMdemo
concept model 56flexible hub geometry 74
detail of socket on the flexible hub 41, 50evolution of flexible hub 25evolution of hub development 93flashlight game 33flexible hinge concept model 93geometry 39hardware and software components 24microprocessor code
geometry 61HandyBoard interactive-C 61
model with three hubs 71rapid prototyping model 49, 93socket design 35strut design 37topology 32wireless communication 44
asynchronous 66wooden cubes 34, 36, 93
FormWriter 53screen shot 70
FormZ 4fractal geometry 72Frazer, J. 10, 81
Intelligent Modeling Systems 10Machine Readable Models 10Segal model 10Universal Constructor 10
Frei, Ottomovable guyed mast 22
Fröbel Blocks. See Fröbel, FriedrichWatson, 1997 5
Fröbel, Friedrich 5, 8, 77, 80, 89Fuller, R. Buckminster 79
synergetics 9tensegrity 9tensegrity diagram 9
fused deposition modeler 48. See FDM
G
Gaudí, Antonio 80Sagrada Familia School 16
Gehry, Frank 16generatrix 16geometrical surfaces 23geometry
programming for 58, 61Gilbert, A. C.
Erector set 8gimbal. See universal jointginglymus joint. See elbow jointgirders and panels 78gooseneck 28, 29Gorbet and Orth, 1997 85
PBasic programming hub 67hypar surfaces 17. See Engel, Heinrichhypertext markup language. See html
I
ideafinder.com 8iMac
processor speed 61infrared transmitter 55Intelligent Modeling Systems. See Frazer, J.Interactive-C
FlexM HandyBoard code 100
K
kinetic memory 14Kitamura et al., 2000 85
ActiveCube 92K’nex™ 5, 9Königsberg, Seven Bridges of 73
L
La Conch supper club. See Ferrer, TorroLackner et al. 86Lawson, B 83Le Corbusier 5, 80leaf spring 28, 29LED 34, 36, 38, 39, 40, 57, 95
component in the flexible hub 40component in the wooden cube 35, 36connection diagram to HandyBoard 62Interactive-C programming 61, 62, 63PBasic programming base station 67programming for topology 58
LEGO™ 5, 9. See Computational Building
BlocksLertsithichai and Seegmiller, 2002
CUBIK 13, 86light attenuation 37light sensor. See photosensorlight-emitting diode. See LEDLincoln Logs. See Wright, Frank LloydLisp
program for geometry 74, 124topology node diagram 71, 118
listening mode. See PBasic: SERIN functionLoeb, A. L. 80Logo 70
Machine Readable Models. See Frazer, J.Magnetic Geomag™ 5Malmö, Sweden 19Martin, F. 86Martin, Fred 94. See also Cricket interfaceMeehan, 1984 5mercury tilt switch 42, 43, 61
programming for the model's geometry 61wiring diagram 42
metal wire core 28, 29Microchip PIC microprocessor 94Microchip PIC16C56c 94microprocessor
Microchip PIC16C56c 94Motorola MC68HC11 95
millipede 28, 29minimal surfaces. See Engel, HeinrichMinsky, Marvin 70mollusk 28, 29Monkey™. See Esposito et al., 1995motor port
natural hinge 28, 29Navigational Blocks 84. See Camarata, Kennickel-titanium alloy. See nitinolNilsen et al., 1993 4, 83nitinol 28, 29node diagram 71non-orthogonal architecture. See Vollers, K
O
orientationprogramming for the model's geometry 61
Otto, FreiMovable Guyed Mast 22
P
Pajeau CharlesTinker Toys 5, 8
Papert, Seymour 70parametric modeling 23Parks, H. and Wills, D. 82path 54PAUSE function. See PBasicPBasic 53
DEBUG function 66debugging window 66PAUSE function 66programming
BasicStamp 2 base station 67, 109BasicStamp 2 hub 67flowchart for base station 100, 107flowchart for hub 108hub 112
RCTIME function 116SERIN function 66
PDA 13personal digital assistant. See PDAphalanges 28, 29Phidgets 77. See Greenberg and Boyle, 2002:
Privacy Preserving MediaSpace; Greenberg and Fitchett, 2001:Phidgets
photosensor 34, 39, 40, 95component in the flexible hub 40component in the wooden cube 35connection diagram to HandyBoard 62Interactive-C programming 62, 63PBasic programming base station 67PBasic programming hub 68wireless hub readings 116
Piaget 70pin hinge 28, 29pinless hinge 28, 29Pioneer Square district, Seattle 12pitch, yaw and roll 43pitching 27polyhedra, regular 75polymers. See ABS plastic; acrylic
strut; silicone; surgical tubingpotentiometer
angle readings from wireless hub 116Interactive-C programming 63node diagram programming 71PBasic programming hub 68programming for geometry 61
POV-Ray 2, 87Privacy Preserving Media Space. See
Greenberg and Boyle, 2002: PrivacyPreserving Media Space; Greenberg andFitchett, 2001: Phidgets
Q
QuickLink board. See Surelink RF transceiver
R
Raffle et al. 86
135
Topobo, 2003 92, 93Topobo, 2004 14, 92
Ramagon™ 5Rand, P 83rapid prototyping 48, 78, 88raytracing engine
POV-Ray 2RCTIME function. See PBasicre-configurable spaces 13resistor
daughterboard for BS2 45Resnick, M 83robotics 86rollerball momentary switch 35
component in the wooden cube 35rolling 27rotational potentiometer 31, 42, 49, 96
component in the flexible hub 42
S
Sagrada Familia School. See Gaudí, AntonioSan Juan, Puerto Rico 16Scarlatos et al. 84Schlegel diagram 53, 54sea urchin 28, 29Segal model. See Frazer, J.sensor readings
wireless hubs 116, 117sensory puzzles 86serial port
AppleScript code for web browser 56Interactive-C programming 63PBasic programming base station 67programming for topology 58
SERIN function. See PBasicSeven Bridges of Königsberg 73shape memory alloy. See nitinolShape Tape™ 87Sharlin et al., 2002 86silicone 39, 77, 96
component in the flexible hub 44detail of component 46diagram of wireless setup 47
surgical tubing 30, 39, 77surging 27swaying 27Sydney, Australia 17Sydney Opera House. See Utzon, JørnSynergetics. See Fuller, R. Buckminster
T
tangible interaction + graphical interpretation84
tangible interface 3tangible modeling interface 13Tejera, Javier. See Carbajosa, Jorge and Javier
TejeraTekCAD Pro. 78, 88tensegrity. See Fuller, R. Buckminstertensile folding structure 22tensile structure systems 19tetrahedron 75tilt switch. See mercury tilt switchTinker Toys. See Pajeau, Charles
136
Topobo. See Raffle et al.: 2004topology 78
Interactive-C programming 61node diagram programming 71programming for 57
toys. See Computational ConstructionKits; Construction Kits
(bibliography) 88traveling salesman problem 72Triangles 85. See Gorbet and Orth, 1997Turning Torso Tower. See Calatrava, Santiago: