Black Stork OSD R Instruction Manual v2.0 BlackStork R OSD System Instruction Manual KIT CONTENTS BSOSD includes: - OSD Main Board. - 50A Current Sensor. - GPS 10Hz Unit. - Wiring accessories (2 servo extensions + 1 GPS Cable + BSLink922). GND PWR SGN 10Hz GPS Module 10Hz GPS Black Stork V2 OSD Current Sensor BSLink922 AUX BATT OSD INPUT AND OUTPUTS GND PWR SGN GND +5Vcc ATM Video OUT Video IN 10Hz GPS Module Black Stork V2 Main Board Top View Radio Receiver CH0 Radio Receiver CH1 Current Sensor Video Battery FW Upgrade Connector
The BSOSD has 2 Power inputs: “Flight Battery” input is reserved for the Current
Sensor, and “Video Battery” is reserved for an additional back-up battery.
Once power is connected to the OSD, the OSD will provide power to the FPV Set
through the “video IN” and “video OUT” connectors, so the voltage provided to
the OSD, will be used also to supply the FPV set (unless you change the wiring
diagram).
Remember that the OSD battery inputs, supply energy not only to the OSD unit but to
the transmitter and to the camera, so the Video Camera and AV Transmitter
must be voltage compatible.
The BSOSD can be supplied from 7VDC to 12.6VDC (2S and 3S LiPo)
The FW Upgrade header connector has 4 pins used to connect the FW Upgrade USB
Key (Not included). Follow the stick indications on the BSOSD main board.
Be extremely careful when connecting the Video Battery and the Current
Sensor to the OSD unit, any confusion in the position of the connector will
damage the unit permanently.
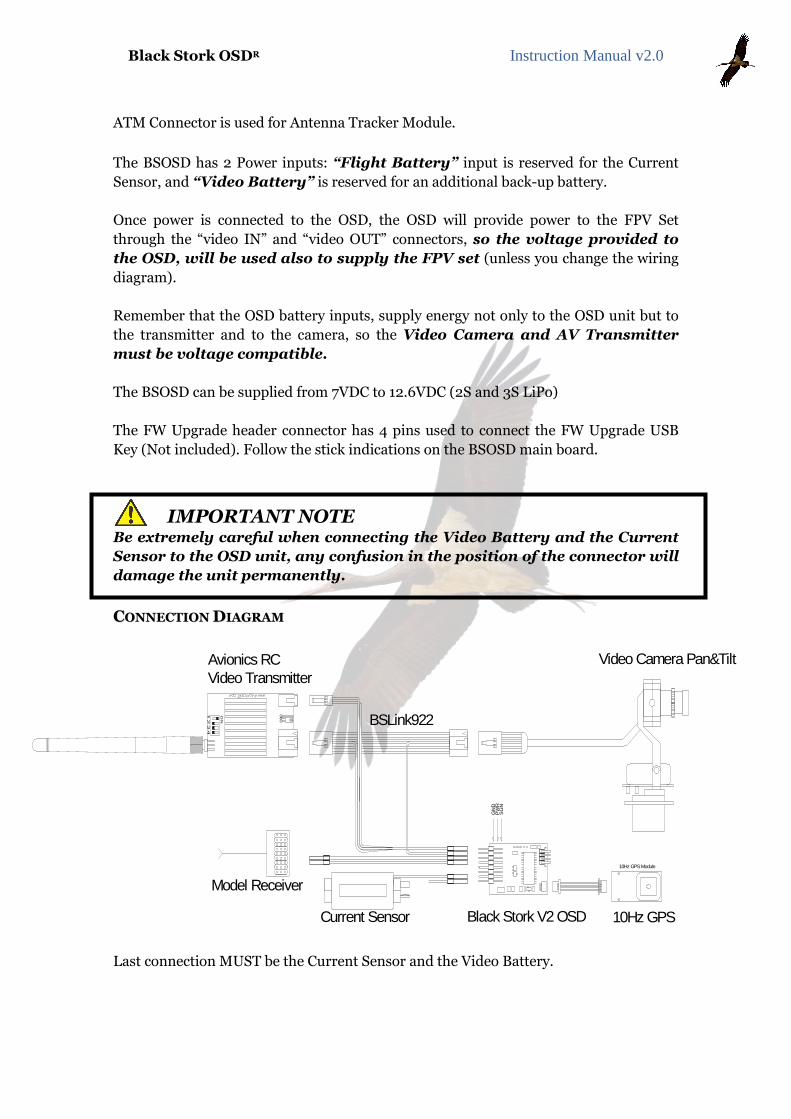
CCOONNNNEECCTTIIOONN DDIIAAGGRRAAMM
Last connection MUST be the Current Sensor and the Video Battery.
IMPORTANT NOTE
GN
DP
WR
SG
N
10Hz GPS Module
Video Camera Pan&Tilt
10Hz GPSBlack Stork V2 OSDCurrent Sensor
Model Receiver
Avionics RCVideo Transmitter
BSLink922
Black Stork OSDR Instruction Manual v2.0
OOPPEERRAATTIIOONN IINNSSTTRRUUCCTTIIOONNSS
The OSD can be operated in 2 ways:
1.- By using 2 RC channels, form the model radio receiver (CH0 and CH1).
- CH0 is used to operate the OSD during the flight. CH0 will be also used to
navigate through the menus and the different screens and options, so a 3
position Switch Button of the transmitter should be assigned to this
function, although other type of switch/button could be used.
- CH1 is used as “ENTER” key. So when you have selected an option
navigating through the menus, the “ENTER” action should be performed by
this stick/button.
Select in the RC Transmitter the channels which will operate the OSD and be sure that
the range of both Channels is 100% in the ATV (end points).
It is recommended to select a 3 position switch in the TX to operate the CH0. Under
these conditions, the button will have 3 positions: UP, Middle and DOWN. The UP and
DOWN positions are used to manage the OSD. The Middle position is used by the OSD
to detect the “Fail Safe”, so you will have to program this channel in your transmitter,
in FS mode, in “Middle” position.
2.- By using the pushbuttons on the OSD board:
Black Stork V2 Main BoardBottom View
CCAALLIIBBRRAATTIIOONN
The system needs to know the end points of the radio receiver channels, so first time
you operate the OSD, a stick calibration is needed.
Once connected correctly all the devices to the OSD, except the video battery and the
current sensor, turn on the RC Transmitter.
CH0 and CH1 end points should be configured in the transmitter to be in the 70% -
100% range.
Turn ON the OSD by connecting the Video Battery connector.
Black Stork OSDR Instruction Manual v2.0
The system will show what channels are connected/working (CH0, CH1) and will wait
until the CH0 be operative.
When CH0 is operative, a message will appear in the screen:
- If CH0 is in UP position, the OSD will start normally and the message
“Starting OSD...” will be shown; after some seconds, the OSD will start
normally, even if CH1 is not connected.
- If CH0 is in DOWN position, the OSD will enter in the calibration menu
and the message “Calibrate ON” will be shown; after some seconds the OSD
will enter in the Calibration menu. Before to enter in calibration
mode, be sure CH1 is connected properly.
Once inside the “calibration controls menu” you should move both controls (CH0 and
CH1) to fill and empty the icons shown in the screen. If CH0 is in UP position, the bar
shown in the screen corresponding to this control should be empty. If the dedicated
button is in DOWN position, the bar should be filled. You should reverse the channel in
the transmitter if the position is reversed. Same applies to CH1.
Fail Safe Feature
Fail safe indication is provided by the OSD. The OSD will understand a Fail Safe when:
- CH0 is in the middle position (or servo travelling).
- There is no signal in the CH0 input.
Black Stork OSDR Instruction Manual v2.0
If your transmitter allows you to program the Fail Safe, you should program it in the
Channel corresponding to CH0, in such a way that in case of Fail Safe, the CH0 will be
in the middle position.
Once calibration is finished, you should move the Switch to the DOWN position and the
Stick to the OK position during 3 seconds (approx) to exit the calibration menu.
NNOORRMMAALL OOPPEERRAATTIIOONN
If the GPS is connected, the OSD will wait for valid data in the GPS receiver, so to
operate the OSD you should be in an open sky area and with the OSD antenna oriented
to the sky.
Normally GPS fixes position in less than a minute, but under some circumstances it
could take more than 3 minutes to fix position. If GPS doesn’t fix position, revise
the wiring. Some models of video cameras or AV Transmitters or other
digital devices, may interfere the GPS during its normal operation, check
compatibility before to use them together with the GPS and try to separate the GPS
from this devices as most as you can.
If you experiment fixing problems, test the system in stand-alone mode, without any
camera or transmitter connected to the OSD, just with a video monitor or VR glasses.
Moving the CH0 switch in the transmitter, you may select “Fly” or “Configure OSD”,
and by pushing (or pulling) the controller assigned to CH1 in the transmitter you will
enter in the desired option.
It is recommended to wait until GPS has fixed position to enter in “Fly” mode.
If the cursor is in “Fly” position, when the GPS has detected more than 7 satellites, the
OSD enters automatically in “Fly” mode after some seconds.
Black Stork OSDR Instruction Manual v2.0
CCOONNFFIIGGUURRAATTIIOONN MMEENNUU
Entering in the configuration menu by acting over CH1 control, you will see the
following screen
Menu Options
Units
On this screen you can choose between metric or imperial units format moving CH0
controller in your transmitter, wait for 3 seconds just after you selection to exit to main
menu.
Alarms
This screen allows you to setup all the desired alarms and it looks like this:
To enable or disable an alarm, move the cursor (with the CH0 TX controller) through
the different alarms and enter in each alarm by acting on the CH1 controller (in the
TX). Once inside an alarm, the cursor will be positioned over the “enable (E) or disable
(D)” option, to enable or disable such alarm, act over CH0 controller in the transmitter.
Once selected the option “E” or “D”, act over the CH1 controller in the transmitter to
store in memory the desired option.
Black Stork OSDR Instruction Manual v2.0
Programming Alarm values
When you are over the alarm value, acting over CH0 controller UP, DOWN or Middle
position, the alarm value will be increased, decreased or not modified, and acting over
CH1, you will accept the value and the value will be stored in the OSD memory.
Once alarm value is programmed, the cursor will be positioned on the alarms root
options then we can repeat the process again for rest of the alarms.
Battery Capacity
This option sets the power battery capacity.
Move CH0 controller to set the OSD in “increasing” or “decreasing” mode and act over
the CH1 controller to increase or decrease the value.
When the battery capacity is set, wait for 3 seconds to exit to the main menu.
Current Sensor calibration
The current sensor indicates the current consumption by the model power system. The
current sensor needs to be calibrated in order to obtain an accurate value of the current
consumption and Battery level indication.
WARNING!!! Be extremely careful during the current sensor calibration process. You
are going to move the throttle stick on the Transmitter, and the propeller on the plane
will turn at a very high speed. Ask for other people to help you. DO NOT TRY TO
CALIBRATE THE SENSOR ALONE, you may result injured.
Be sure that the propeller may turn without obstacles and the plane is fixed and cannot
move from its position even with the Throttle stick at maximum.
You will need a power meter or an ammeter to calibrate the OSD indication.
Place the power meter between the battery and the current sensor.
When ready move the Throttle Stick at 0% position, and go to the Current sensor menu.
Black Stork OSDR Instruction Manual v2.0
By moving CH0 controller to the UP position, the “Full Scale” value will be increased
when acting the CH1 controller.
By moving CH0 controller to the DOWN position, the “Full Scale” value will be
decreased when acting the CH1 controller.
Move the Throttle Stick smoothly, increasing the propeller speed to an intermediate
position.
Compare the value shown in the OSD with the value indicated by the auxiliary power
meter. If the value shown in the OSD is lower than the value shown in the Power meter,
decrease the “Full Scale” value. If the value shown in the OSD is higher than the value
shown in the Power meter, increase the “Full Scale” value.
Adjust the “Full Scale” value until the value shown in the OSD matches with the value
shown by the power meter.
If CH0 or CH1 are not actuated during 10 seconds, the OSD will return to the main
menu and the configuration value is stored in memory.
Variometer Sensitivity
The Variometer indicates the climbing trend with the movement of a graphic bar. The
sensitivity of the variometer indication may be adjusted.
Move CH0 controller to set the OSD in “increasing” or “decreasing” mode and act over
the CH1 controller to increase or decrease the variometer sensitivity.
When the sensitivity is set, wait for 3 seconds to exit to the main menu.
Black Stork OSDR Instruction Manual v2.0
MayDay Alarm
Mayday is an alarm that will act when the distance to the pilot is longer than the value
configured and the Altitude is lower than the value configured.
When a “mayday” alarm acts, a “MAYDAY” message together with the GPS coordinates
will be displayed on the screen. This will help us to find our plane in case of accident.
With the CH0 controller, move through the different mayday options, and select with the CH1 controller the desired one , after selection the cursor will be positioned over the value, now move the CH0 controller to increase or decrease the value. In the UP position, the value will be increased, in the DOWN position, the value will be decreased, and in the middle position, the value will not change.
Black Stork OSDR Instruction Manual v2.0
Flying Mode. You may enter manually to the fly option from the main screen, or wait until the OSD indicates “Ready to fly”. When the GPS has fixed the position and more than 7 satellites are located, the OSD will indicate “Ready To Fly”; after some seconds it will enter automatically in “flight mode”
• Flying Screens Black Stork OSD has 3 different flying screens switchable on the fly with the CH0 controller.
� Main Screen (Flying mode) The main flying screen looks like this:
Following the Bearing Indicator (arrow), we will find the landing location. The RAP indicator provides the angle of the relative position between the pilot and the plane, in such a way that if we are receiving the Video signal with a Patch antenna, and we orientate the patch antenna to the plane following the angle indication (relative to the geographic North), we will receive the maximum of video signal strength.
Speed
Current (not shown)
Pilot
Plane North
Angle Line of Max Video Signal strenght
Flight Battery Voltage (not shown)
Video Battery Voltage
Flight Battery Energy consumed
Distance to the home & Bearing Indicator
Altimeter
Antenna RAP
Flight Time
Black Stork OSDR Instruction Manual v2.0
Second Screen (HUD mode)
Third Screen (Landing mode)
We can see 2 icons on this screen: a plane icon and a circle icon. The plane icon indicates the plane position (always in the centre of the screen) and the circle icon, indicates the relative position to the take off location. Moving the plane to the transmitter icon, we will find the landing position. Fourth Screen (Wild mode) In the 3 screen, no indications are provided except the alarms. Notes: We STRONGLY recommend you to test the system in your model before to use it in FPV. Mount the system and record a flight with a video recorder and check everything is OK BEFORE flying in FPV mode. Legal Notice: When you use the BlackStork OSD and the Current sensor provided, you assume you own risks, we decline any responsibility related with the use of these devices.
Black Stork OSDR Instruction Manual v2.0
Current Sensor Internal Electric Diagram BSOSD Internal Power Distribution
+ Positive
- Negative
Output Input
Flight Battery Input ESC Output
Current Signal to the BSOSD
+VCC to the BSOSD
GND to the BSOSD
Flight Battery Input
Video Battery Input
Video Camera supply
AV Transmitter supply
Flight Battery Voltage is sampled here
Video Battery Voltage is sampled here
Internal OSD Circuits
Black Stork OSDR Instruction Manual v2.0
Absolute maximum ratings Current Sensor Max Current 50Arms Max Voltage 13VDC (3S LiPo Battery) Min Voltage 7VDC (2S LiPo Battery) BSOSD Main Board Max Voltage 13VDC (4S LiPo Battery) Min Voltage 7VDC (2S LiPo Battery) Max Current to the Camera & Transmitter 2A



























![$9$,/$%/( Single-Channel Monochrome On-Screen … ns OSD Fall Time OSD insertion mux register OSDM[5,4,3] = 011b 60 ns OSD Insertion Mux Switch Time OSD insertion mux register OSDM[2,1,0]](https://static.documents.pub/doc/80x56/5ade5f927f8b9afd1a8b4e03/9-single-channel-monochrome-on-screen-ns-osd-fall-time-osd-insertion.jpg)
