MTH-ME82 Boundary Element and Finite Element Methods Course details 20 Lectures 3 hour exam. Choose 3 out of 4 questions. Recommended Text Pozrikidis, C. (1992) Boundary Integral & Singularity Methods for Linearised Viscous Flow, Cambridge. There is one copy of this book in the library. Problem sheet One exercise sheet contains assorted problems covering the whole course. One question from the exercise sheet will appear verbatim on the summer exam paper. Contents 1. Background material. 2. Boundary integral methods for potential flow: Laplace’s equation, Poisson’s equation. 3. Boundary integral methods for Stokes flow 4. The Finite Element Method
Transcript
MTH-ME82 Boundary Element and Finite Element Methods
Course details
20 Lectures
3 hour exam. Choose 3 out of 4 questions.
Recommended Text
Pozrikidis, C. (1992) Boundary Integral & Singularity Methods for Linearised Viscous Flow,
Cambridge.
There is one copy of this book in the library.
Problem sheet
One exercise sheet contains assorted problems covering the whole course. One question
from the exercise sheet will appear verbatim on the summer exam paper.
Contents
1. Background material.
2. Boundary integral methods for potential flow: Laplace’s equation, Poisson’s equation.
3. Boundary integral methods for Stokes flow
4. The Finite Element Method
MTH-ME82 Boundary Element and Finite Element Methods
1. Background
We will start by covering some background material, some of which you may already
be familiar with, to prepare for the main course material.
1.1 Index notation
In standard index notation, we represent the components of a vector using a subscript.
So
ui
for i = 1, . . . , 3 represents the three-dimensional vector u = (u1, u2, u3).
Definition: The Kronecker delta, δij , is defined by
δij =
0 if i 6= j
1 if i = j
So δ12 = 0 and δ22 = 1 and so on. If we write this as a matrix (assuming i = 1, 2 and
j = 1, 2) we have (1 0
0 1
),
we recognise it as the 2× 2 identity matrix.
Definition: The alternating tensor, εijk, is defined as
εijk =
0 if any of i, j, k are equal
1 if i, j, k are in cyclic order
−1 otherwise.
So, for example,
ε123 = ε231 = 1, ε132 = −1, ε133 = 0.
The alternating tensor provides a convenient way of expressing a vector (cross) product in
index notation.
Exercise: Show that εijkajbk is equal to the ith component of a × b by writing out the
components.
Einstein’s summation convention: According to this convention we sum over an index when-
ever we see it repeated (the range of the sum will be obvious from the context). For example,
for a calculation in three dimensions, i = 1, 2, 3, and
aii means3∑i=1
aii.
2
MTH-ME82 Boundary Element and Finite Element Methods
For a calculation in two dimensions, i = 1, 2, and
bii means2∑i=1
bii.
For example, δii = 2 in two dimensions, and δii = 3 in three dimensions.
Index shifting: The Kronecker delta is useful for shifting the index of a vector. For example,
we can write
ui = δij uj .
The summation convention is being used here to sum over the repeated index j on the right
hand side. Note that the only non-zero contribution to the sum comes when i = j, and
thus we recover the term on the left hand side.
1.2 The delta function
The delta function is an example of a generalised function or distribution. Informally,
we express the delta function as
δ(x) =
0 if x 6= 0
∞ if x = 0
We will not need the formal theory behind the delta function here1. However, we will make
use of the following property.
Sifting property: When a delta function multiplies another function inside an integral, the
result is the value of that function at the point where the argument of the delta function
vanishes. So, ∫ ∞−∞
δ(x)f(x) dx = f(0).
The delta function sifts out all values of f except that at x = 0. Also,∫ ∞−∞
δ(x− a)f(x) dx = f(a).
The delta function sifts out all values of f except that at x = a.
1.3 The principal value of an integral
Consider the following divergent (or improper) integral,∫ 1
−1
1
xdx.
1If you are interested, a good book is Applied Functional Analysis by D. Griffel.
3
MTH-ME82 Boundary Element and Finite Element Methods
There is evidently a problem with the integrand at x = 0. Proceeding carefully, we re-write
the integral as ∫ 1
−1
1
xdx = lim
ε→0
[ ∫ −ε−1
1
xdx+
∫ 1
ε
1
xdx].
Integrating, we have
limε→0
[ln |ε| − ln | − 1|+ ln |1| − ln |ε|
]= 0.
However, we could equally have re-written the integral as∫ 1
−1
1
xdx = lim
ε→0
[ ∫ −aε−1
1
xdx+
∫ 1
ε
1
xdx],
for any a > 0. Integrating, we find
limε→0
[ln |aε| − ln | − 1|+ ln |1| − ln |ε|
]= ln a,
and we can choose a to get any result we want!
Definition: The principal value of the integral∫ 1
−1
1
xdx
is defined to be
PV
∫ 1
−1
1
xdx = lim
ε→0
[ ∫ −ε−1
1
xdx+
∫ 1
ε
1
xdx]
= 0.
The principal value of other improper integrals is defined in a similar way.
1.4 Applications of the Boundary Integral Method
Potential Flow
A potential flow is one which is both inviscid and irrotational. Consider a steady (time-
independent) flow with velocity field u. If the flow is inviscid, then u satisfies the Euler
equations
(u · ∇)u = −∇p,
where p is the fluid pressure. The flow is irrotational if
∇× u = 0.
In this case we can define a scalar potential, φ, such that
u = ∇φ.
Conservation of mass requires that
∇ · u = 0.
4
MTH-ME82 Boundary Element and Finite Element Methods
Substituting u = ∇φ, we find
∇2φ = 0. (1.1)
So a potential flow satisfies Laplace’s equation.
For a potential flow, the boundary condition at a solid wall is
u · n = 0,
where n is the normal to the wall. This is called the normal flow condition and it demands
that fluid not pass through the solid wall. Since u = ∇φ, the condition may be written
∇φ · n = 0 or∂φ
∂n= 0, (1.2)
on the solid wall.
A typical potential flow problem might require us to solve (1.1) subject to (1.2). If the
geometry of the flow domain is simple, like a circle say, then this may be straightforward.
Example: Solve the equation
∇2φ = 0
in the circle 0 ≤ r ≤ 1 with φ = 1 on r = 1. In polar coordinates (assuming no θ
dependence), Laplace’s equation becomes
1
r
d
dr
(r
dφ
dr
)= 0.
Integrating, we find
φ = A log r +B.
We set A = 0 to remove the singularity at r = 0, and require B = 1 to satisfy the boundary
condition on the circle. So the solution is φ = 1.
Exercise: Think about how you would solve the same problem as above in a domain with
a more complex geometry. How would you satisfy the boundary condition φ = 1 on a
boundary with a complicated shape?
Electrostatics
A conducting metal sphere of given radius is charged to a potential φ = 1 and held above
flat ground at z = 0 where the potential is zero, φ = 0. The electric field outside the sphere
satisfies Laplace’s equation,
∇2φ = 0.
Compute the electric potential φ outside the sphere. This problem can be solved using the
Boundary Integral Method. Moreover, it can still be solved if the sphere is deformed to
some other shape.
5
MTH-ME82 Boundary Element and Finite Element Methods
Stokes flow
Stokes flow occurs at small values of the Reynolds number (we will discuss this more closely
later in the course). The Boundary Integral Method has been applied to a host of different
problems in Stokes flow. Examples include:
• Oscillations of a gas bubble
• Bursting of a bubble near to a wall or a free surface
• Flow of a viscous fluid film over a shaped surface
• Deformation of red blood cells passing through capillaries
• Break-up of a viscous liquid jet
2. The boundary integral method (BIM) for potential flow
Over the last 30 or so years, a very popular method for solving Stokes flows in intricate
geometries has developed and matured. This nifty method calculates a Stokes flow solely by
reference to what happens at the flow boundaries. As we will see, we can write the velocity
at any point in the flow field purely in terms of the flow quantites on the boundaries. The
method is called the boundary integral method.
The historical development of the mathematical machinery sitting behind the boundary
integral method is nicely reviewed in the paper Cheng & Cheng (2005) Heritage and early
history of the boundary element method, Eng. Analysis Bound. Elem., 29, 268-302.
The main advantage of the boundary integral method for solving certain classes of PDEs is
as follows: Since reference is only made to boundary values, the dimension of the problem
is effectively reduced by one. So a three dimensional problem effectively becomes a two
dimensional problem. This brings about a tremendous saving in computing time.
Its is an extremely powerful method for this reason: It can cope with any geometry at
all. Since many practical applications involve very complex geometries, this constitutes a
major advantage over other methods such as finite differences which are very clumsy if the
geometry is not simple.
The boundary integral method can be applied to both potential flows and Stokes flows.
Since the implementation of the former is slightly easier, it is these which we shall discuss
first.
2.1 The BIM for potential flow in two dimensions
Aim: To solve Laplace’s equation inside a domain D, with boundary C whose unit normal
n is defined to point inside D.
6
MTH-ME82 Boundary Element and Finite Element Methods
We take as our starting point Green’s second identity,
ψ∇2φ− φ∇2ψ = ∇ · (ψ∇φ− φ∇ψ). (2.1)
We choose ψ = G, where G satisfies the equation
∇2G+ δ(x− x0) = 0, (2.2)
where the second term is the delta function.
Definition: We call x0 the pole or the singular point or just the singularity.
nb: G is called a fundamental solution of Laplace’s equation or Green’s function2 (we will
discuss these in more detail later).
Let us define
r = |x− x0|,
so that r is the distance from x0 to x. When r 6= 0 (2.2) becomes
∇2G = 0, (2.3)
or (assuming G only depends on r)
1
r
d
dr
(r
dG
dr
)= 0.
We notice that
G = λ log r, (2.4)
for constant λ, is a solution. For reasons to be revealed, we choose λ = −1/2π.
Definition: The fundamental solution to Laplace’s equation,
G = − 1
2πlog r, (2.5)
is called the free-space Green’s function.
In the next step, we integrate (2.1) over the domain D. In fact, to avoid the problem with
the delta function at x = x0, we delete from D a small disk, Dε, of radius ε centred at x0.
Then we define D′ = D −Dε and integrate (2.1) over D′:∫∫D′
(G∇2φ− φ∇2G) dS =
∫∫D′∇ · (G∇φ− φ∇G) dS = 0,
since both ∇2G = 0 and ∇2φ = 0 within D′. Using the divergence theorem we obtain∫C+Cε
(G∇φ− φ∇G) · n dl = 0, (2.6)
2Strictly speaking one should only refer to this as a Green’s function when it satisfies a boundary value
problem, that is G adopts prescribed values on a given boundary
7
MTH-ME82 Boundary Element and Finite Element Methods
where C is the boundary to D and Cε is the boundary to Dε, and l measures arc length
along either C or Cε.
Consider now the integral around Cε,
Iε =
∫Cε
(G∇φ− φ∇G) · n dl
In the limit ε→ 0, the radius of the disk shrinks to zero. From (2.4)
G = λ log r.
Therefore
Iε =
∫Cε
(λ log r
∂φ
∂r− λφ
r
)dl.
Since r = ε on Cε, letting ε→ 0, we find
Iε = λ(log ε)∂φ
∂r(x0)
∫Cε
dl−λφ(x0)
ε
∫Cε
dl = 2πλ(ε log ε)∂φ
∂r(x0)−2πλε
φ(x0)
ε= −2πλφ(x0).
Rearranging (2.6) we have ∫C
(G∇2φ− φ∇2G) dS = 2πλφ(x0),
and so
φ(x0) = − 1
2πλ
∫C
(φ∇2G−G∇2φ) dS. (2.7)
For tidiness, we choose λ = −1/2π. Substituting for G we have
φ(x0) =1
2π
[ ∫C
log r n · ∇φ dl −∫Cφ n · ∇ log r dl
]. (2.8)
This is called Green’s third identity. In fact equation (2.7) applies for a general Green’s
function G which satisfies (2.2) and any chosen boundary conditions.
Definition: The boundary integral equation (BIE) for potential flow is given by
φ(x0) =
∫Cφ n · ∇G−G n · ∇φ dl, (2.9)
where the unit normal to the boundary C, n, points inside the solution domain D.
Note : Equation (2.8) is an example of an integral equation. Although φ appears as the
subject on the left hand side, the function φ and its derivatives also appear on the right
hand side inside the integrals.
Other Green’s functions
8
MTH-ME82 Boundary Element and Finite Element Methods
It is worth emphasizing at this stage that a Green’s function is simply a device to enable us
to solve problems. In the present scenario, we will use a Green’s function to help us solve
Laplace’s equation
∇2φ = 0
subject to some boundary condition, for example
φ = 0 on Γ,
where Γ represents a boundary. The solution which we end up with does not depend on the
Green’s function used to obtain it. In this sense, we can think of a Green’s function simply
as a tool which is used to create an end product; but the end product itself is not changed
by the particular choice of tool used to put it together.
Above we derived the free space Green’s function,
G = − 1
2πlog r,
where r = |x − x0| and x0 is the location of the singularity. In some cases, it is expedient
to select a Green’s function which vanishes (or its derivative vanishes) on the boundary. A
simple example is a Green’s function for a singularity x0 = (x0, y0) (with y0 > 0) placed
above a plane wall at y = 0. The Green’s function is required to vanish at the wall, that is
G = 0 when y = 0.
We can construct this Green’s function by placing an image singularity of opposite
sign3 below the wall at y = −y0. We write down the free-space Green’s function for each
singularity and add them together, thus
G = − 1
2πlog r +
1
2πlogR,
where
r =√
(x− x0)2 + (y − y0)2, R =√
(x− x0)2 + (y + y0)2.
So
G = − 1
4πlog
(x− x0)2 + (y + y0)2
(x− x0)2 + (y − y0)2
Now, setting y = 0 we obtain
G = − 1
4πlog
(x− x0)2 + y2
0
(x− x0)2 + y20
= 0,
as required.
Alternatively, we may instead wish to construct a Green’s function whose y-derivative
vanishes at the wall. After come experimenting, we notice that
G = − 1
2πlog r − 1
2πlogR,
3By this we mean that we take G = (1/2π) log r rather than G = −(1/2π) log r
9
MTH-ME82 Boundary Element and Finite Element Methods
fits the bill. To check, we differentiate with respect to y to obtain
Gy = − 1
2π
ryr− 1
2π
RyR.
Now,
ry =y − y0
r, ry =
y + y0
R.
So,
Gy = − 1
2π
y − y0
r2− 1
2π
y + y0
R2.
Setting y = 0 we find
Gy =1
2π
y0
r2− 1
2π
y0
R2= 0,
as required.
Periodic Green’s functions
Sometimes it is useful to work with a periodic Green’s function which satisfies a periodic
relation, for example
G(x, y;x0, y0) = G(x+ L, y;x0, y0),
for some L > 0. One example is a periodic array of singularities located at the positions
(x0 ± nL, y0)
for n = 0, 1, 2, . . .. After some working we find
G = − 1
4πlog
2cosh(k[y − y0])− cos(k[x− x0]),
where k = 2π/L.
For a periodic array of singularities located above a wall at y = 0, with G required to vanish
at the wall, we have
G = − 1
4πlog
2cosh(k[y−y0])−cos(k[x−x0])
+1
4πlog
2cosh(k[y+y0])−cos(k[x−x0]).
Exercise: Check that the periodic Green’s function above has the property G = 0 when
y = 0. How would you modify the formula so that Gy = 0 on y = 0?
The Boundary Integral Method
Our goal is to solve (2.9) for φ. To make this more explicit, we write out (2.9) again showing
explicitly all the dependencies:
φ(x0) =
∫Cφ n(x) · ∇G(x,x0)−G(x,x0) n(x) · ∇φ(x) dl(x).
Note that
10
MTH-ME82 Boundary Element and Finite Element Methods
• x0 is the singular point in the interior of the domain D.
• x is the so-called field point.
• Integration is done with respect to arclength around C. Note that the local increment
of arc length, dl depends on x.
We notice that on the right hand side, the unknown function φ appears inside integrals
which are defined over the boundary C. So the right hand side is only concerned with
boundary values of φ. This suggests the following way to proceed:
(i) Take the point x0 to lie on the boundary C. Then the integral equation involves only
values of φ on the boundary.
(ii) Solve the integral equation for the boundary values of φ.
(iii) Once the boundary values of φ are known we can compute the right hand side of (2.8)
for any x0 inside D. Hence we can find φ everywhere in the domain D.
Points (i-iii) form the basic steps of the boundary integral method.
Step (i) requires us to take the point x0 to lie on C. This requires some careful thought.
Let’s work with a general Green’s function, G, and write out the boundary integral equation
(2.9)
φ(x0) =
∫Cφ(x) n · ∇G(x,x0) dl(x)−
∫CG(x,x0) n · ∇φ(x) dl(x). (2.10)
nb: We’ve written out explicitly the arguments on each function in (2.10) to keep clear the
functional dependencies.
On the right hand side of (2.10), there are two integrals,∫CG(x,x0) n · ∇φ(x) dl(x) and
∫Cφ(x) n · ∇G(x,x0) dl(x).
We call the first integral the single layer potential (SLP).
We call the second integral the double layer potential (DLP).
The limit x0 → C
It can be shown that the SLP is continuous as the point x0 approaches and then crosses C.
In contrast, as x0 crosses C, the double-layer potential undergoes a jump discontinuity. As
x0 approaches C from inside the domain D, we find (see the Problem Sheet)
limx0→C
∫Cφ(x) [n · ∇G(x,x0)] dl(x) =
∫ PV
Cφ(x)[n · ∇G(x,x0)] dl(x) +
1
2φ(x0), (2.11)
11
MTH-ME82 Boundary Element and Finite Element Methods
and when x0 approaches C from outside D, we find
limx0→C
∫Cφ(x) [n · ∇G(x,x0)] dl(x) =
∫ PV
Cφ(x)[n · ∇G(x,x0)] dl(x)− 1
2φ(x0). (2.12)
Note that on the right hand side of these equations x0 is located on C. (For multiply-
connected domains, inside is taken to mean the area into which the normal vector points.)
The superscript PV means that we are taking the principal value of the integral.
Example
Suppose that the domain D occupies the strip −1 ≤ x ≤ 1, y > 0, and label as L that part
of C lying on y = 0. Consider what happens to the DLP as x0 travels down the y axis
through L.
We have that x0 = (0, y0) as we are interested in what happens as y0 passes down
through zero from above. The unit normal on L pointing into D is the unit vector in the
positive y direction. So we have
n · ∇G =∂G
∂y.
Taking the free space Green’s function we have
∂G
∂y= − 1
2π
∂
∂y(log r) = − 1
2π
(y − y0)
r2.
since r2 = x2 + (y − y0)2 and∂r
∂y=
(y − y0)
r2.
So the DLP over L is
D =
∫Lφ(x) n · ∇G dx =
∫ 1
−1φ(x)
∂G
∂y
∣∣∣y=0
dx =1
2π
∫ 1
−1
φ(x) y0
x2 + y20
dx.
A difficulty will arise in the integral at x = 0 when y0 = 0. We rewrite as
D =1
2πy0
∫ 1
−1
φ(x)− φ(0)
x2 + y20
dx+1
2πφ(0)
∫ 1
−1
y0
x2 + y20
dx,
Consider the first integral. For small x, φ(x) = φ(0) + xφ′(0) + · · · . Hence near to x = 0,
limy0→0+
[φ(x)− φ(0)
x2 + y20
]≈ lim
y0→0+
[φ′(0)
x
x2 + y20
]= φ′(0)
1
x.
Therefore in the limit y0 → 0+ the first integral is improper and behaves like the integral∫ 1
−1
1
xdx.
To make sense of it in this limit, we take the principal value of the original integral. Therefore
we write, for y0 → 0+,
D =1
2πy0 PV
∫ 1
−1
φ(x)− φ(0)
x2 + y20
dx+1
2πφ(0) PV
∫ 1
−1
y0
x2 + y20
dx,
12
MTH-ME82 Boundary Element and Finite Element Methods
For the second integral, ∫ 1
−1
y0
x2 + y20
dx = 2 tan−1
(1
y0
).
We can see that the value of this integral is discontinuous at y0 = 0 since
limy0→0+
∫ 1
−1
y0
x2 + y20
dx = π, limy0→0−
∫ 1
−1
y0
x2 + y20
dx = −π.
When y0 is on L (so that y0 = 0) the integrand vanishes so that
PV
∫ 1
−1
y0
x2 + y20
dx = 0.
Putting everything together, then, we have that in the limit y0 → 0+,
D =1
2πy0 PV
∫ 1
−1
φ(x)− φ(0)
x2 + y20
dx+1
2πφ(0) PV
∫ 1
−1
y0
x2 + y20
dx+1
2ππφ(0),
and so
D =1
2πPV
∫ 1
−1
y0φ(x)
x2 + y20
dx+1
2φ(0).
Or, in the original form
D =
∫ PV
Lφ(x) n · ∇G dx+
1
2φ(0).
We can work along similar lines to show that as y0 approaches L from outside D, that is as
y0 → 0−,
D =
∫ PV
Lφ(x) n · ∇G dx− 1
2φ(0).
To complete step (i) of the boundary integral method, we let the point x0 approach C from
the inside in (2.10) and then, using (2.11), we obtain
φ(x0) =
∫ PV
Cφ(x) [n · ∇G(x,x0)] dl(x) +
1
2φ(x0)−
∫CG(x,x0) n · ∇φ(x) dl(x),
where x0 lies on C. So,
1
2φ(x0) =
∫ PV
Cφ(x) [n · ∇G(x,x0)] dl(x)−
∫CG(x,x0) n · ∇φ(x) dl(x),
where the unit normal to the boundary C, n, points inside the solution domain D. We now
introduce the flux q, which is defined4 so that q ≡ n · ∇φ. Then we have
1
2φ(x0) =
∫ PV
Cφ(x) [n · ∇G(x,x0)] dl(x)−
∫CG(x,x0) q(x) dl(x), (2.13)
4Why do we call this the flux? Fick’s law states that a substance flows down its concentration gradient
(like heat, for example). If φ represents the concentration of some substance, then −∇φ is its flow rate
according to Fick’s law. Then the flux out of a closed region with inward pointing normal n will be n · ∇φ.
13
MTH-ME82 Boundary Element and Finite Element Methods
where x0 lies on C.
If φ is prescribed on the boundary, then we have a Fredholm integral equation of the first
kind for the flux q, ∫CG(x,x0) q(x) dl(x) = F (x0),
where
F (x0) =
∫ PV
Cφ(x) [n · ∇G(x,x0)] dl(x)− 1
2φ(x0).
It is called an integral equation of the first kind since the subject (in this case q) appears
inside the integral but not on the right hand side.
If instead q is prescribed on the boundary C, we have a Fredholm integral equation of the
second kind for the boundary distribution of φ,
1
2φ(x0) =
∫ PV
Cφ(x) [n · ∇G(x,x0)] dl(x) + Φ(x0),
where
Φ(x0) = −∫CG(x,x0) q(x) dl(x).
It is called an integral equation of the second kind because the subject (in this case φ)
appears both inside the integral and outside of it.
Example problem 2.1
The function φ satisifes Laplace’s equation in the domain D inside the circle C of radius a,
∇2φ = 0,
with the boundary condition φ = 1 on C. Formulate the solution for φ using the BIM.
First let us note that the exact solution, which is regular everywhere inside the circle,
is φ = 1. Now, we start with the BIE for a point x0 lying on C, namely (2.13),
1
2φ(x0) =
∫ PV
Cφ n · ∇G−G q dl.
where q = n · ∇φ and noting that φ = 1 on C we have
1
2=
∫ PV
Cn · ∇G−G q dl.
We will use polar coordinates (ρ, θ) with origin at the centre of the circle. The unit normal
points into D in the negative radial direction, and so
1
2= PV
∫ 2π
0
(−∂G∂ρ
)ρ=a
a dθ − a∫ 2π
0G q dθ.
14
MTH-ME82 Boundary Element and Finite Element Methods
We will utilise the free space Green’s function, G = −(1/2π) log r, where r = [(x − x0)2 +
(y − y0)2]. It will be useful to note that when both (x, y) and (x0, y0) lie on C, using the
cosine rule we have
r2 = 2a2(1− cos θ), (2.14)
where θ is the angle subtended between the points (x, y) and (x0, y0) and the origin. Also,
when (x0, y0) lies at a general point in space,
r2 = a2 + ρ2 − 2aρ cos θ,
where again θ is the angle subtended between the points (x, y) and (x0, y0) and the origin.
Hence∂G
∂ρ=∂G
∂r
∂r
∂ρ= − 1
2πr
ρ− a cos θ
r= − 1
2π
ρ− a cos θ
r2.
So on ρ = a,
−∂G∂ρ
=a
2π
1− cos θ
r2=
1
4πa.
Therefore the BIE becomes1
2=
1
2+
a
2π
∫ 2π
0q log r dθ
and so ∫ 2π
0q log r dθ = 0. (2.15)
This is satisfied if we take q = 0 on ρ = a. According to the exact solution, φ = 1, we have
q(ρ = a) = n · ∇φ∣∣∣ρ=a
= φρ
∣∣∣ρ=a
= 0,
and so the two solutions are consistent.
Cautionary warning: When we reformulate a partial differential equation, such as
Laplace’s equation, as an integral equation, as we are doing here, we introduce the pos-
sibility of spurious solutions which satisfy the integral equation but not the original PDE.
To illustrate this, let us revisit the example above. We start by noting that when both x
and x0 are on C, using (2.14),∫ 2π
0log r dθ =
1
2
∫ 2π
0log[2a2(1− cos θ)] dθ = π log(2a2) +
1
2
∫ 2π
0log(1− cos θ) dθ.
Exercise: Show that ∫ 2π
0log(1− cos θ) dθ = −2π log 2.
So ∫ 2π
0log r dθ = 2π log a.
15
MTH-ME82 Boundary Element and Finite Element Methods
For the example problem, we derived the constraint on the boundary flux (2.15),∫ 2π
0q log r dθ = 0.
Consider what happens if we take the circle to be of unit radius, so that a = 1. Then we
have that ∫ 2π
0log r dθ = 0,
and so we may choose q = κ, where κ is any constant, to satisfy (2.15). But we know from
the exact solution that the only admissible value is κ = 0. This serves as a warning to be
on our guard when dealing with the integral formulation of a PDE.
2.2 The BIM for potential flow at a corner
The arguments in the previous section relied on the use of the divergence theorem,
which is applicable provided that the boundary C is piecewise smooth5. However, there
is a difficulty with allowing the point x0 to approach a point on a curve, such as a sharp
corner, where the normal vector is not continuous. In this case, the argument needs some
modification.
In practice, we are often interested in computing solutions in domains which involve corners
or kinks, for example a rectangular domain. In this section, we address how to adapt the
boundary integral method for potential flow to such regions.
To proceed, we go back to the beginning of the argument: Green’s second identity. This
states that
ψ∇2φ− φ∇2ψ = ∇ · (ψ∇φ− φ∇ψ).
Integrating over the domain, D, we obtain∫∫Dψ∇2φ− φ∇2ψ dS =
∫∫D∇ · (ψ∇φ− φ∇ψ) dS =
∫C
(ψ n · ∇φ− φ n · ∇ψ) dl
by the divergence theorem, which we note is still valid for a boundary with a corner.
As before, φ satisfies Laplace’s equation, ∇2φ = 0. For the sake of argument, we take ψ to
be the free-space Green’s function,
ψ = G = − 1
2πlog r,
satisfying
∇2G+ δ(x− x0) = 0.
5A curve is smooth if its normal vector is a continuous function of position. Such a curve or surface is
also called Lyapunov. A curve is piecewise smooth if its normal vector is continuous at finitely many points.
One such example is a square (e.g., Kreysig §10.5).
16
MTH-ME82 Boundary Element and Finite Element Methods
So,
−∫∫
Dφ∇2G dS =
∫C
(G n · ∇φ− φ n · ∇G) dl.
Consider now a point x0 which lies outside of the domain D. It follows that ∇2G = 0
leaving
0 =1
2π
∫C
(G n · ∇φ− φ n · ∇G) dl.
Substituting for G,
0 =1
2π
∫C
(log r n · ∇φ− φ n · ∇ log r) dl.
Since r = |x− x0|,
∇ log r =( ∂∂x,∂
∂y
)log r =
(x− x0
r2,y − y0
r2
)=
x− x0
r2.
Thus,
0 =1
2π
∫C
(log r n · ∇φ− φ n · x− x0
r2) dl (2.16)
(a) (b)
α
n
x0
ε
n
θ
x0
n
Figure 1: A domain with a sharp corner of angle α.
Now consider a domain including a sharp corner of local angle α as shown in figure 1. A
close-up of the corner is shown to the right of the figure. To proceed with the formulation
of the method, we deform the contour locally to skirt round the inside of the corner through
a small arc of radius ε as shown in figure 1(b). We will call this circular arc Γ. Note that
the point x0 lies outside of the deformed contour, so the most recent equation is applicable.
Over Γ, the contribution from the right hand side is
1
2π
∫Γ(log r n · ∇φ− φ n · x− x0
r2) dl.
17
MTH-ME82 Boundary Element and Finite Element Methods
On the arc, r = ε, x − x0 = ε cos θ and y − y0 = ε sin θ, where θ is the angle shown, and
dl = ε dθ giving,1
2πε
∫ α
0(log ε n · ∇φ− φ n · x− x0
ε2) dθ.
The unit normal to the arc
n =x− x0
r,
leaving
1
2πε
∫ α
0(log ε n · ∇φ− φ |x− x0|2
ε3) dθ =
1
2πε
∫ α
0(log ε n · ∇φ− φ
ε) dθ.
Also,
n · ∇φ =x− x0
r· ∇φ =
x− x0
r
∂φ
∂x+y − y0
r
∂φ
∂y,
giving1
2πε
∫ α
0
[log ε
(cos θ
∂φ
∂x+ sin θ
∂φ
∂y
)− φ
ε
]dθ
(since x− x0 = ε cos θ and y − y0 = ε sin θ)
=1
2π
∫ α
0
[ε log ε
(cos θ
∂φ
∂x+ sin θ
∂φ
∂y
)− φ
]dθ.
Now we let the arc Γ shrink to the corner point by taking the limit ε→ 0, i.e. we consider
limε→0
1
2π
∫ α
0
[ε log ε
(cos θ
∂φ
∂x+ sin θ
∂φ
∂y
)− φ
]dθ
Note that limε→0 ε log ε = 0. So,
limε→0
1
2π
∫ α
0
[ε log ε
(x− x0
r
∂φ
∂x+y − y0
r
∂φ
∂y
)− φ(x)
]dθ = − 1
2πφ(x0)
∫ α
0dθ = − α
2πφ(x0).
In summary,1
2π
∫Γ(log r n · ∇φ− φ n · x− x0
r2) dl = − α
2πφ(x0).
So,1
2π
∫C
(log r n · ∇φ− φ n · x− x0
r2) dl
=1
2πPV
∫C
(log r n · ∇φ− φ n · x− x0
r2) dl + lim
ε→0
1
2π
∫Γ(log r n · ∇φ− φ n · x− x0
r2) dl,
where the principal value PV refers to the fact that the small arc of radius ε has been
excluded from the integration.
Thus, (2.16) becomes1
2π
∫C
(log r n · ∇φ− φ n · x− x0
r2) dl
18
MTH-ME82 Boundary Element and Finite Element Methods
=1
2πPV
∫C
(log r n · ∇φ− φ n · x− x0
r2) dl − α
2πφ(x0) = 0.
Rearranging,α
2πφ(x0) =
1
2πPV
∫C
(log r n · ∇φ− φ n · x− x0
r2) dl
The previous equation was derived working with the free-space Green’s function. But it is
equally applicable to any Green’s function. So we may write in general,
α
2πφ(x0) = −
∫CG(x,x0) n · ∇φ(x) dl(x) +
∫ PV
Cφ(x) n · ∇G(x,x0) dl(x).
Note that the PV is only required on the 2nd integral as the first is continuous as x0
approaches the contour.
nb: If α = π, then there is no corner, and we recover our original boundary integral equation
(2.13),
1
2φ(x0) = −
∫CG(x,x0) n · ∇φ(x) dl(x) +
∫ PV
Cφ(x) n · ∇G(x,x0) dl(x).
Summary: Potential Flow
In this section we have:
• starting from Green’s second identity, derived the boundary integral equation (BIE)
for potential flow valid for a point x0 inside the domain of interest.
• introduced the notion of a Green’s function
• using the notion of a principal value, obtained the form of the BIE valid for a point
x0 lying on the contour enclosing the domain of interest.
• derived the form of the BIE valid for a contour with a sharp kink
3. The boundary element method (BEM) for potential flow
We have now established how to reformulate a partial differential equation as an integral
equation, and we have seen that the advantage in doing this is that the new formulation is
defined over a boundary of any shape. In contrast, traditional methods of solving PDEs,
for example separation of variables, usually require the boundary geometry to be relatively
simple.
Aim: The aim of this section is to see how to go about solving an integral equation for
potential flow numerically. The procedure is known as the Boundary Element Method
(BEM).
19
MTH-ME82 Boundary Element and Finite Element Methods
We demonstrate the method by way of a specific example. In short, the idea is to discretise
the boundary C of the solution domain D using a sequence of straight or curved boundary
elements over each of which the solution is approximated using constants or polynomial
approximations.
Example problem 3.1
Consider the inviscid, irrotational motion of fluid through a circle C of radius a. Inside the


































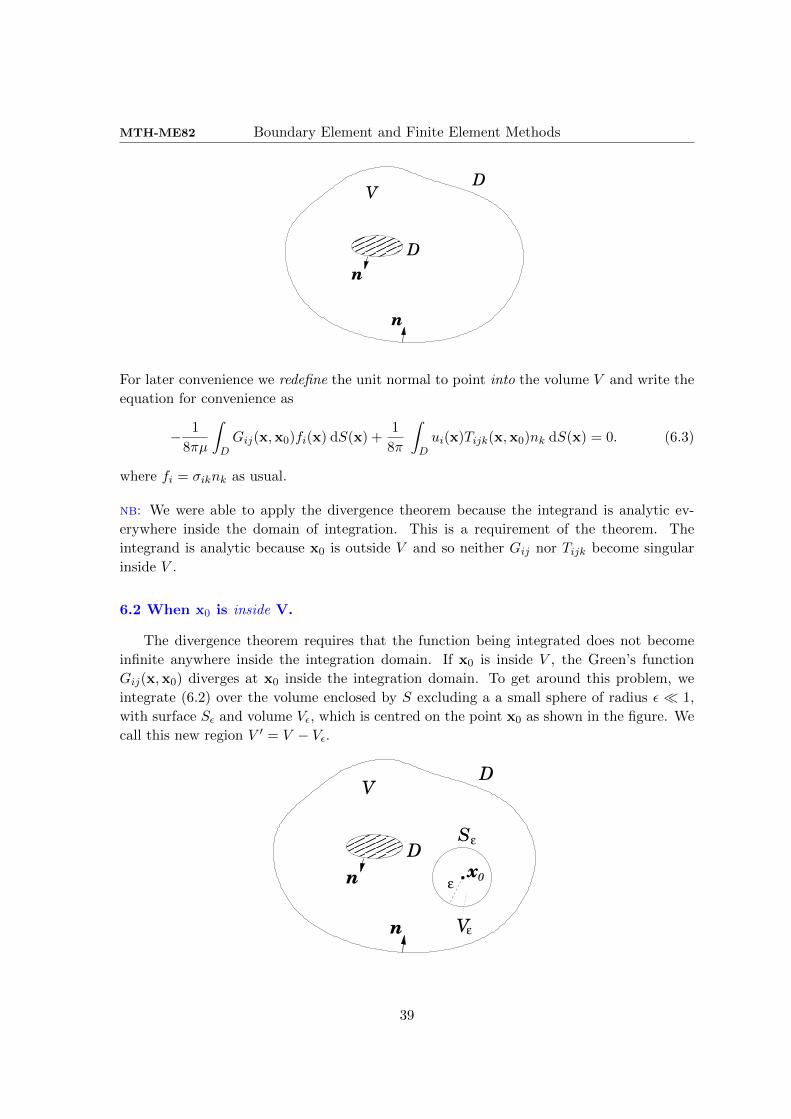

































![Implicit Finite Element Schemes for the Stationary Compressible … · Implicit Finite Element Schemes for the Stationary Compressible ... [32] overwrite the boundary integral by](https://static.documents.pub/doc/80x56/5b83ed847f8b9a315b8e3072/implicit-finite-element-schemes-for-the-stationary-compressible-implicit-finite.jpg)




![Hunter, P - Finite Element Method & Boundary Element Method [Course Notes 2001]](https://static.documents.pub/doc/80x56/552d570e4a7959c6598b4696/hunter-p-finite-element-method-boundary-element-method-course-notes-2001.jpg)











