29
Braquistócrona vs. Geodésica Um problema de Cálculo de Variações Hugo Araújo Luso 2006
Braquistócrona vs. Geodésica
Um problema de Cálculo de Variações
Hugo AraújoLuso 2006

Luso 2006
1. Cálculo de VariaçõesObjectivo:• Procurar mínimos ou máximos de
funcionais.• Funcional:
• Exemplo:Comprimento de arco de curva no plano entre o ponto e .
Φ : {Curvas} → °
(x0 , y0 ) (x1, y1)

Luso 2006
Seja de classe
Cálculo variacional minimiza funcionais da forma
ondee Diz-se que:
minimiza a funcional se
C1
y*∈C ∀y ∈C : Φ(y*) ≤ Φ(y)
y : x0 , x1[ ] → °
x→ y(x)
C = y: x0 , x1[ ] → ° : y(x0 )=y0 ∧y(x1)=y1{ }
Φ :C→ °
y(x)→ Φ(x,y(x),y'(x))dxx0
x1
∫
y '(x)=dy dx.

Luso 2006
1.1. Equação de Euler-LagrangePretende-se minimizar a funcional:
Assume-se que é de classe
Condição necessária para mínimo:
Eq. de Euler-Lagrange
Uma curva ao longo da qual é verificada a eq. de Euler-Lagrange chama-se de extremal.
ddx
∂Φ∂y'
⎛⎝⎜
⎞⎠⎟=
∂Φ∂y
Φ = F(x, y, y ')dxx0
x1
∫F(x, y, y ') C2
Luso 2006
1.1.1. Casos Particulares da eq. de E-L.
1º Caso - Se F não depende explicitamente de y, isto é,
ou equivalentemente, , a
equação de E-L escreve-se:
2º Caso - Se F não depende explicitamente de x, isto é,
ou equivalentemente, , a equação
de E-L implica: F −y'
∂Φ∂y'
=C ∈°
Φ = F(x, y ')dxx0
x1
∫
ddx
∂Φ∂y'
⎛⎝⎜
⎞⎠⎟=0 ⇒
∂Φ∂y'
=C ∈°
∂F∂y
= 0
Φ = F(y, y ')dxx0
x1
∫ ∂F∂x
= 0
Eq. da energia
Luso 2006
1.1.2. Demonstração do 2º caso particularSeja
Logo, qualquer qualquer extremal verifica a eq. da energia.
Nota 1: O recíproco é verdadeiro se é de classe e
Ψ =F(y, y ') − y '∂F(y, y ')
∂y '
dΨdx
=∂Φ∂y
y'+∂Φ∂y'
y''−y''∂Φ∂y'
−y'ddx∂Φ∂y'
=y'∂Φ∂y
−ddx∂Φ∂y'
⎛⎝⎜
⎞⎠⎟
C 2
yy '≠0.
Luso 2006
1.2. Cálculo de Variações - Exemplo•Exemplo:Comprimento de arco da curva entre eé dado pela seguinte funcional:
Como , e a eq. de E-L é:
As extremais para este problema chamam-se geodésicas.
y(x) (x0 , y0 ) (x1, y1)
Φ = 1 + y '2dxx0
x1
∫
F(x, y, y ')= 1+ (y'(x))2
ddx
y '
1+ (y'(x))2⎛⎝⎜
⎞⎠⎟=0
Luso 2006
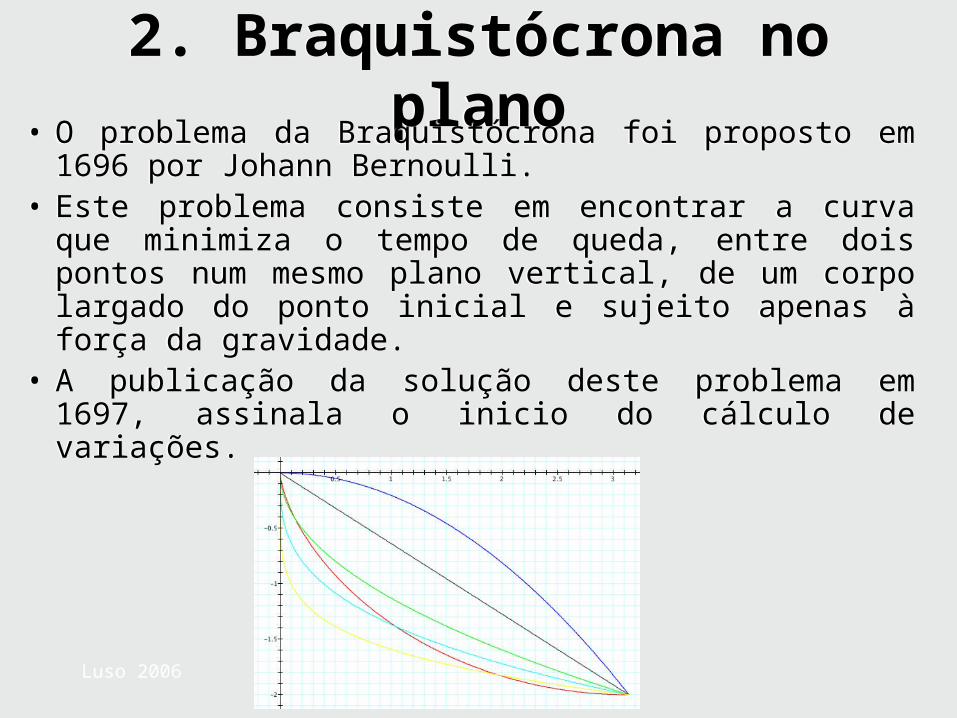
2. Braquistócrona no plano• O problema da Braquistócrona foi proposto em 1696 por
Johann Bernoulli.• Este problema consiste em encontrar a curva que
minimiza o tempo de queda, entre dois pontos num mesmo plano vertical, de um corpo largado do ponto inicial e sujeito apenas à força da gravidade.
• A publicação da solução deste problema em 1697, assinala o inicio do cálculo de variações.
Luso 2006
Considere-se que o corpo que é largado do ponto e chega ao ponto com eSeja uma curva parametrizada pelo tempo t e o seu vector velocidade.
Cálculo do tempo de percurso do corpo pela curva
Assumimos que ao longo desta curva se tem
Pelo Teorema da Conservação da Energia
Ec + Ep =Eci + Epi ⇔12mv2 + mgh=
12mvi
2 + mghi ⇔
v2 + 2gh=0 ⇔ &x2 + &y2 =−2gy⇔ &x2 1+ y'2( )=−2gy⇔
dxdt
⎛⎝⎜
⎞⎠⎟2
=−2gy1+ y'2
⇔dtdx
=1+ y'2
−2gy⇔ t=
1+ y'2
−2gy0
x1
∫ dx
y (t) = (x(t), y(t))
&y (t) = ( &x(t), &y(t ))
(0, 0)(x1, y1 ) x1 > 0 y1 < 0.
y =y(x).
y (t).
v = &y = &x2 + &y2
&y =dy
dt=dydx
dxdt=y'&x
Assumindo que y é função de x:
Tempo de percurso entre e ao longo de x0 =0 x1 y =y(x).

Luso 2006
F −y'∂Φ∂y'
=C ⇔ y'=± −1
2C2gy−1 ⇔ y'=± −
k2
y−1
∂F∂x
= 0
Seja k2 =1
2C2g
t =1+ y'2
−2gy0
x1
∫ dx Φ=1+ y'2
−2gy
Pretende-se minimizar a seguinte funcional:
Como , utiliza-se a eq. da energia.
Eq. da energia para o problema da Braquistócrona.
y ' =dydx
=dyds
dxds
⇔dxds
=dyds
y'
Utilize-se a seguinte mudança de variável:
Pelo teorema da função implícita:
y '(x)=± −k2
y(x)−1 ⇔
dxds=±
k2
21−coss( )⇒ x(s)=k
2
2s−sins( )
Resolução da equação diferencialy(s)=−
k2
21−coss( )
Luso 2006
A curva paramétrica
satisfaz a eq. da energia . Esta curva tem o nome de ciclóide.
Nota 2: É possível mostrar que:•A ciclóide define com função de (expressão difícil de obter);•Essa função é de classe e •Pela nota 1 satisfaz a eq. de E-L, pelo que é uma extremal;•A ciclóide é a única extremal.•Usando técnicas de controlo óptimo é ainda possível mostrar que a ciclóide minimiza o tempo de percurso.
y xy x( ) C 2 y '(x)≠0;
y(x)
x(s)=k2
2s−sins( )
y(s)=−k2
21−coss( )
⎧
⎨⎪⎪
⎩⎪⎪
s∈ 0, 2p[ ]k∈° \0{ }
Luso 2006
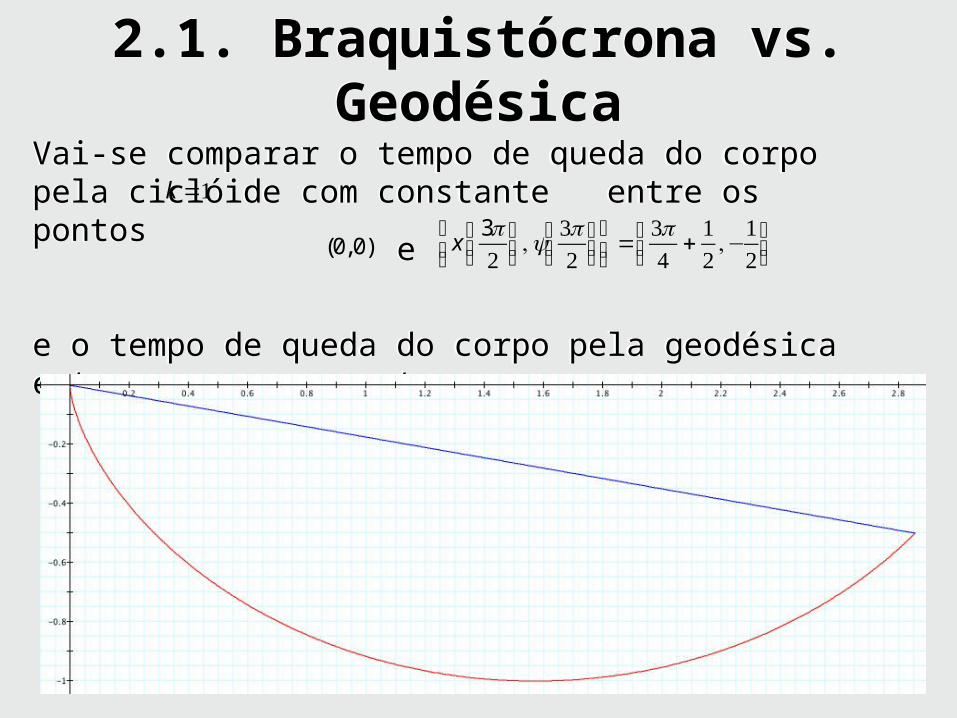
Vai-se comparar o tempo de queda do corpo pela ciclóide com constante entre os pontos
e o tempo de queda do corpo pela geodésica entre os mesmos pontos.
2.1. Braquistócrona vs. Geodésica
k =1
(0, 0) x3p2
⎛⎝⎜
⎞⎠⎟ , y
3p2
⎛⎝⎜
⎞⎠⎟
⎛⎝⎜
⎞⎠⎟ =
3p4+12,−12
⎛⎝⎜
⎞⎠⎟e
Luso 2006
&x2 + &y2 =−2gy⇔
dsdt
⎛⎝⎜
⎞⎠⎟2 dx
ds⎛⎝⎜
⎞⎠⎟2
+dyds
⎛⎝⎜
⎞⎠⎟2⎛
⎝⎜⎞⎠⎟=−2gy(s)⇔ t=
dxds
⎛⎝⎜
⎞⎠⎟2
+dyds
⎛⎝⎜
⎞⎠⎟2
−2gy(s)0
3p2
∫ ds
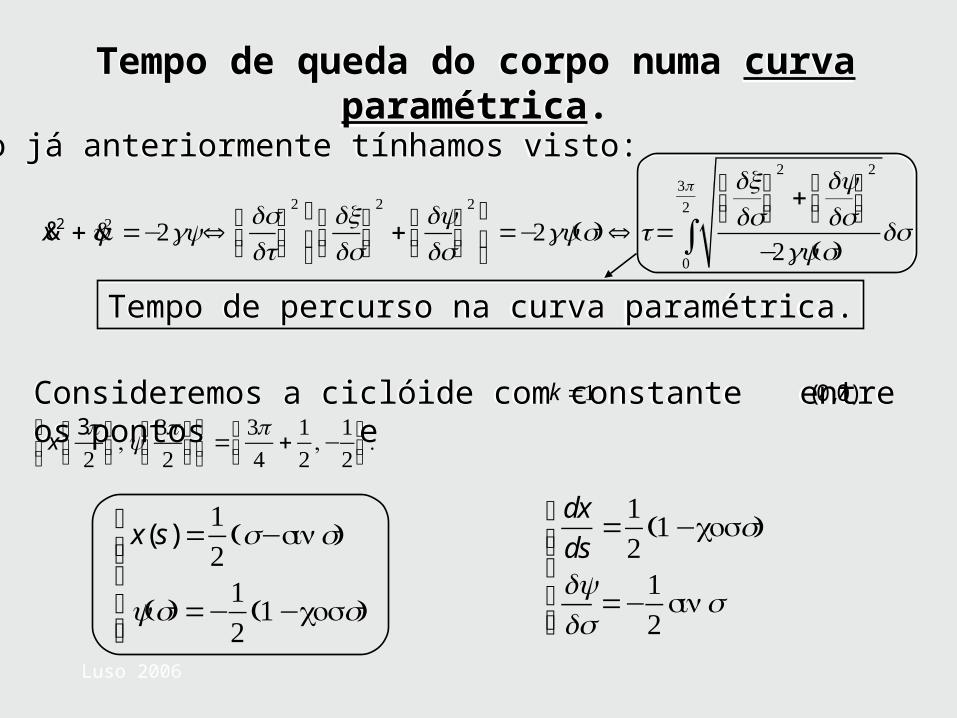
Tempo de queda do corpo numa curva paramétrica.
Como já anteriormente tínhamos visto:
Tempo de percurso na curva paramétrica.
Consideremos a ciclóide com constante entre os pontos e
x(s)=12s−sins( )
y(s)=−121−coss( )
⎧⎨⎪⎪
⎩⎪⎪
(0,0)
x3p2
⎛⎝⎜
⎞⎠⎟ , y
3p2
⎛⎝⎜
⎞⎠⎟
⎛⎝⎜
⎞⎠⎟ =
3p4+12,−12
⎛⎝⎜
⎞⎠⎟ .
k =1
dxds
=121−coss( )
dyds=−
12sins
⎧⎨⎪⎪
⎩⎪⎪
Luso 2006
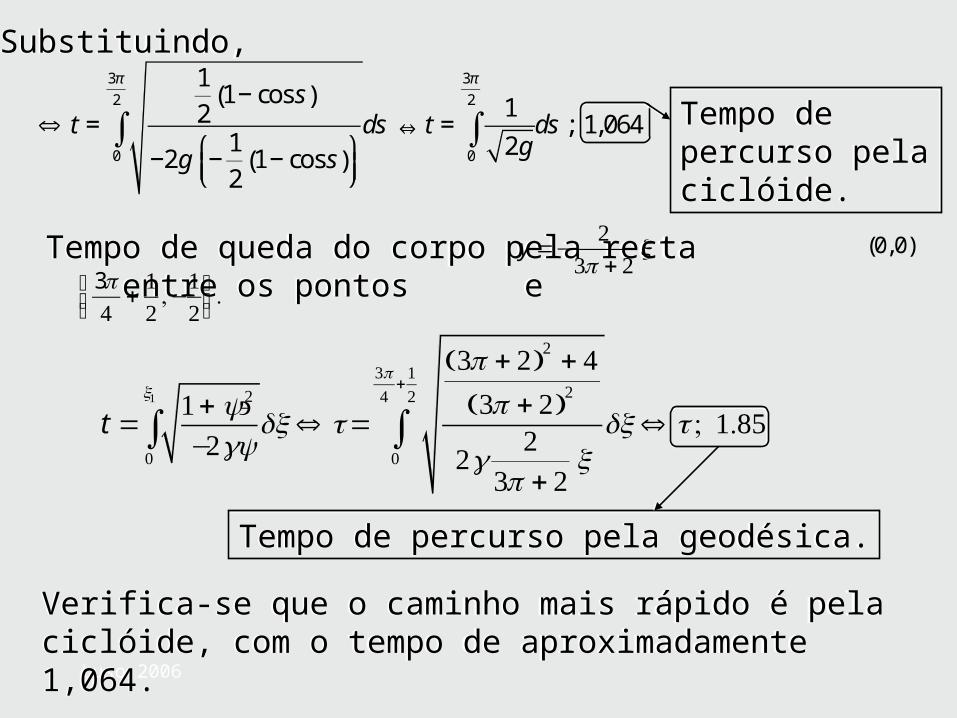
Tempo de queda do corpo pela recta entre os pontos e
(0, 0)3p4+12,−12
⎛⎝⎜
⎞⎠⎟ .
y =−2
3p + 2x
t =1+ y'2
−2gy0
x1
∫ dx ⇔ t=
3p + 2( )2 + 43p + 2( )2
2g2
3p + 2x0
3p4+12
∫ dx ⇔ t ; 1.85
Verifica-se que o caminho mais rápido é pela ciclóide, com o tempo de aproximadamente 1,064.
Tempo de percurso pela geodésica.
⇔ t =
12
1− cos s( )
−2g −12
1− cos s( )⎛⎝⎜
⎞⎠⎟
0
3π2
∫ ds⇔ t =12g0
3π2
∫ ds ; 1,064
Substituindo,
Tempo de percurso pela ciclóide.

Luso 2006
2.2. TautócronaQuickTime™ and aAnimation decompressor
are needed to see this picture.

Luso 2006
Tempo de queda do corpo pela ciclóide entre os pontos e
Considere-se a ciclóide:
x(s)=k2
2s−sins( )
y(s)=−k2
21−coss( )
⎧
⎨⎪⎪
⎩⎪⎪
(0, 0)x p( ), y p( )( ).
Analogamente ao que foi feito anteriormente, o tempo de queda do corpo pela ciclóide entre os pontos e , é obtido por:(0, 0) x p( ), y p( )( )
t =
dxds
⎛⎝⎜
⎞⎠⎟2
+dyds
⎛⎝⎜
⎞⎠⎟2
−2gy(s)0
p
∫ ds⇔ t=
k4
2(1−coss)
2gk2
2(1−coss)0
p
∫ ds⇔ t= k2
2g0
p
∫ ds⇔ t= k2
2gp
Tempo de percurso entre e , largado em (0, 0) (x(p), y(p)) (0,0).

Luso 2006
x p( ), y p( )( )x s0( ), y s0( )( )= x0 , y0( ) s0 ∈ 0,p] [
Tempo de queda do corpo pela ciclóide entre os pontos e com , onde v s0( )=0.
Formula para o tempo de percurso entre e , largado em
Ec + Ep =Eci + Epi ⇔12mv2 + mgh=
12mvi
2 + mghi ⇔ t=
dxds
⎛⎝⎜
⎞⎠⎟2
+dyds
⎛⎝⎜
⎞⎠⎟2
2g(y0 −y)s0
p
∫ ds
y (t) = (x(t ), y(t))
&y (t) = ( &x(t ), &y(t))
(x0 , y0 )
Seja uma curva parametrizada pelo tempo t e o seu vector velocidade.
Analogamente ao efectuado anteriormente, pelo teorema da conservação da energia,
(x(p), y(p ))(x0 , y0 ).
t =k2
2g1−coss
coss0 −cosss0
p
∫ ds
Ao longo da ciclóide tem-se:

Luso 2006
t =k2
2g
sins2
⎛⎝⎜
⎞⎠⎟
cos2s02
⎛⎝⎜
⎞⎠⎟−cos
2 s2
⎛⎝⎜
⎞⎠⎟
s0
p
∫ ds
⇔ t=k2
2g−2arctan 0( )+ 2arctan +∞( )( )⇔ t=
k2
2gp
1−cos(θ)=2sin2 θ2
⎛⎝⎜
⎞⎠⎟
cos(θ)=2cos2 θ2
⎛⎝⎜
⎞⎠⎟−1
⎧
⎨⎪⎪
⎩⎪⎪
Utilize-se as seguintes igualdades trigonométricas:
Para concluir que:
Tempo de percurso entre e , largado em (x0 , y0 ) (x(p), y(p )) (x0 , y0 ).

Luso 2006
3. Braquistócrona no cilindro vertical
Comece-se por parametrizar o cilindro vertical no plano
Considere-se que o corpo que é largado do ponto e chega ao ponto com e
A curva no cilindro terá por coordenadas paramétricas . Assuma-se que é função de
Proceda-se agora de forma análoga ao efectuado no plano.
Ec + Ep =Eci + Epi ⇔ t=1+ z'2
−2gz0
θ1
∫ dθ
(θ0 , z0 )=(0, 0)(θ1, z1) θ1 > 0 z1 < 0.
Tempo de percurso entre e ao longo da curva
θ0 = 0 θ1
z =z(θ).
P : 0,2p[ [ × ° → ° 3
(θ,z)→ (cosθ,sinθ,z)
Ψ(t) = x(t), y(t), z(t)( )Φ(t) = θ (t), z(t)( ) z θ.

Luso 2006
De forma análoga ao efectuado no plano obtem-se a eq. da energia para o problema da Braquistócrona no cilindro vertical:
Prosseguindo-se chegou-se à seguinte curva como solução:
z ' =± −k2
z−1
θ(s) =k2
2s − sin s( )
z(s) = −k2
21− cos s( )
⎧
⎨⎪⎪
⎩⎪⎪
s ∈ 0, sk[ ]k ∈° \ 0{ }
x =cosk2
2s−sins( )
⎛⎝⎜
⎞⎠⎟
y=sink2
2s−sins( )
⎛⎝⎜
⎞⎠⎟
z=−k2
21−coss( )
⎧
⎨
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
s∈ 0, sk[ ]k∈° \0{ }

Luso 2006
4. Braquistócrona no cilindro horizontal
Analogamente ao problema para o cilindro vertical comece-se por parametrizar o cilindro horizontal.
Considere-se que o corpo que é largado do ponto e chega ao ponto com e
Assuma-se que e proceda-se agora de forma análoga ao efectuado no cilindro vertical.
θ1 > 0 y1 > 0.
P : 0,2p[ [ × ° → ° 3
(θ,y)→ (sinθ,y,cosθ)(θ0 , y0 )=(0, 0)
(θ1, y1)
θ =θ(y)
Ec + Ep =Eci + Epi ⇔ t= 1+θ '2
2g(1−cosθ)0
y1
∫ dy
Tempo de percurso entre e ao longo da curva
y0 =0 y1
θ =θ(y).
Luso 2006
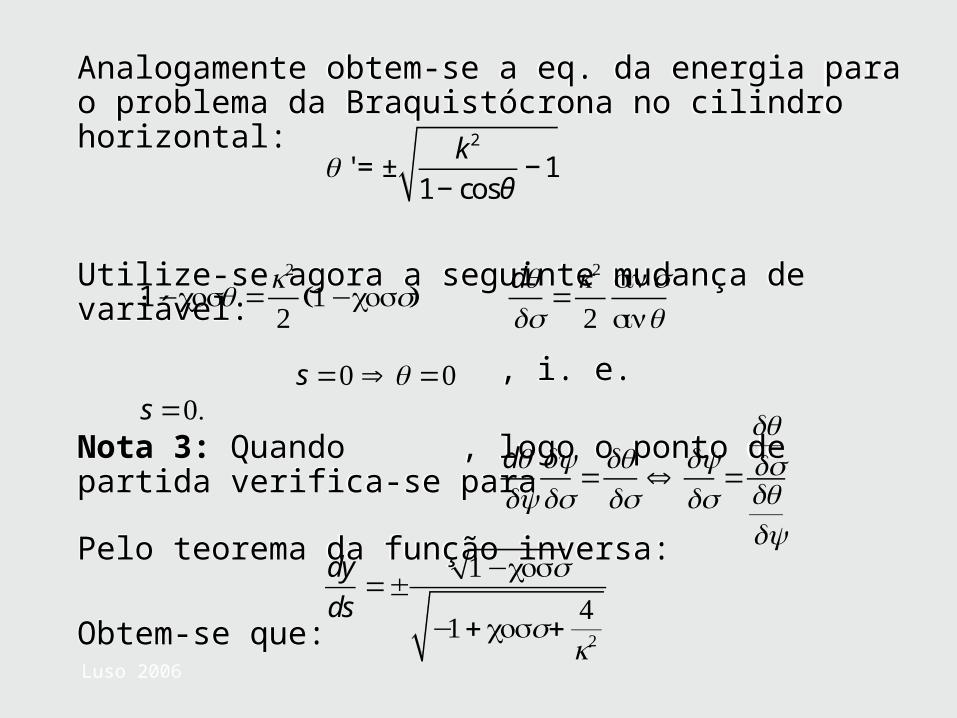
Analogamente obtem-se a eq. da energia para o problema da Braquistócrona no cilindro horizontal:
Utilize-se agora a seguinte mudança de variável:
, i. e.
Nota 3: Quando , logo o ponto de partida verifica-se para
Pelo teorema da função inversa:
Obtem-se que:
θ ' = ±k2
1 − cosθ− 1
1−cosθ =k2
21−coss( )
dθds
=k2
2sinssinθ
dθdy
dyds=dθds
⇔dyds=
dθdsdθdy
s =0 ⇒ θ =0s =0.
dyds=±
1−coss
−1+ coss+4k2
Luso 2006
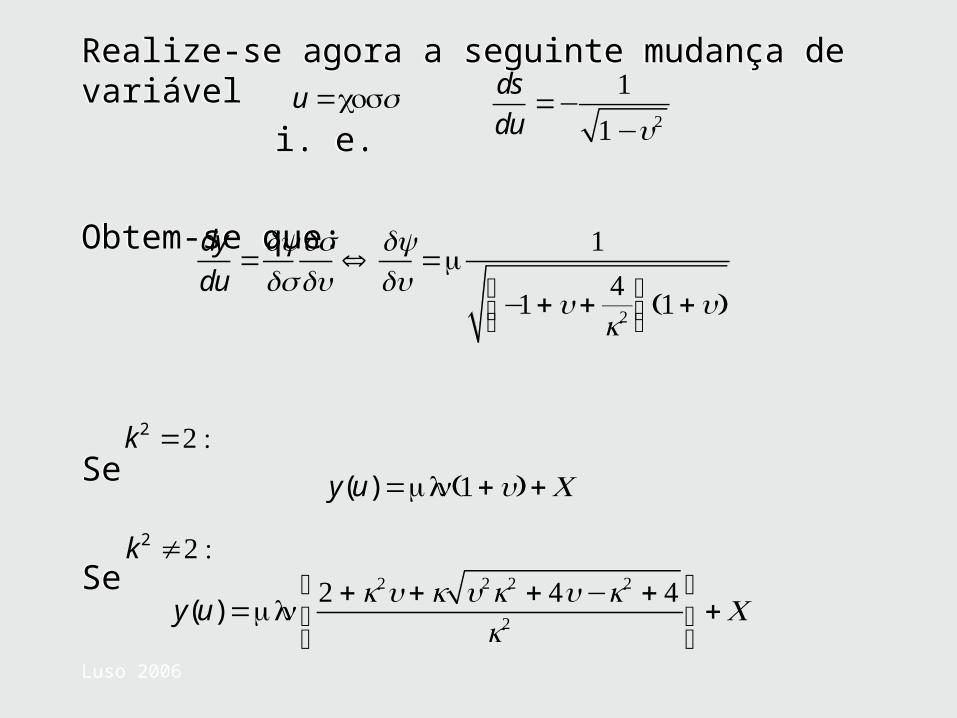
Realize-se agora a seguinte mudança de variável i. e.
Obtem-se que:
Se
Se
u =coss
dydu
=dyds
dsdu
⇔dydu
=m1
−1+u+4k2
⎛⎝⎜
⎞⎠⎟ 1+u( )
dsdu
=−1
1−u2
k2 =2 :
y(u) =mln(1+ u)+C
k2 ≠2 :
y(u) =mln 2 + k2u+ k u2k2 + 4u−k2 + 4
k2⎛⎝⎜
⎞⎠⎟+C

Luso 2006
Como devemos ter , determina-se a constante , e obtem-se a solução paramétrica.
Se
Se
k2 =2 :θ(s) = arccos 1− 2
21− cos s( )⎛
⎝⎜⎞⎠⎟ = s
y(s) = ± ln1+ cos s
2⎛⎝⎜
⎞⎠⎟
⎧
⎨⎪⎪
⎩⎪⎪
k2 ≠2 :
θ(s) = arccos 1− k2
21− cos s( )
⎛⎝⎜
⎞⎠⎟
y(s) = ± ln2 + k2 cos s + k k2 cos2 s + 4 cos s − k2 + 4
k2 + 2 2k + 2
⎛
⎝⎜
⎞
⎠⎟
⎧
⎨⎪⎪
⎩⎪⎪
s ∈ 0, arccos 1−4k2
⎛⎝⎜
⎞⎠⎟
⎡⎣⎢
⎡⎣⎢
θ 0( ), y 0( )( ) = 0, 0( )C
Luso 2006
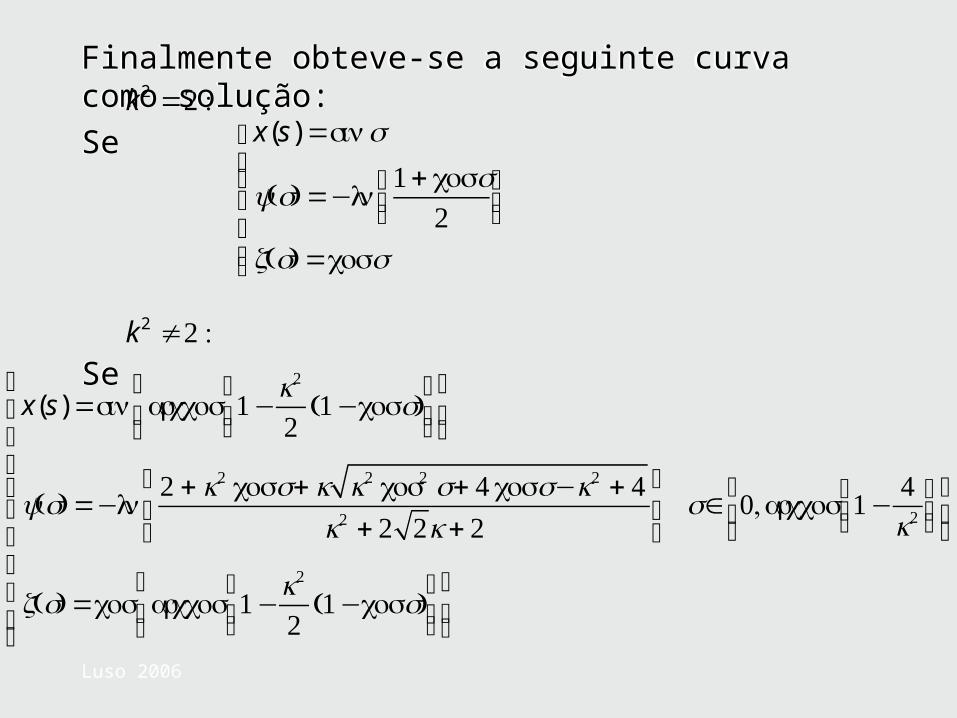
Finalmente obteve-se a seguinte curva como solução:Se
Se
k2 =2 :x(s) =sins
y(s)=−ln1+ coss
2⎛⎝⎜
⎞⎠⎟
z(s)=coss
⎧
⎨⎪⎪
⎩⎪⎪
k2 ≠2 :
x(s)=sin arccos 1−k2
21−coss( )
⎛⎝⎜
⎞⎠⎟
⎛⎝⎜
⎞⎠⎟
y(s)=−ln2 + k2 coss+ k k2 cos2 s+ 4 coss−k2 + 4
k2 + 2 2k+ 2
⎛⎝⎜
⎞⎠⎟
z(s)=cos arccos 1−k2
21−coss( )
⎛⎝⎜
⎞⎠⎟
⎛⎝⎜
⎞⎠⎟
⎧
⎨
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
s∈ 0,arccos 1−4k2
⎛⎝⎜
⎞⎠⎟
⎡⎣⎢
⎡⎣⎢

Luso 2006
4.1. Braquistócrona crescente no cilindro horizontal
Se é ou não possível estender a braquistócrona para além de ?
Defina-se o seguinte ramo direito para a Braquistócrona:
k2 < 2
θD (s) = arccos 1−k2
21 − cos s( )
⎛⎝⎜
⎞⎠⎟
yD (s) = −2 ln2 − k2 + k
⎛⎝⎜
⎞⎠⎟
+ ln2 + k2 cos s + k k2 cos2 s + 4 cos s − k2 + 4
k2 + 2 2k + 2
⎛
⎝⎜
⎞
⎠⎟
⎧
⎨⎪⎪
⎩⎪⎪
s =p
s ∈ p,2p[ [

Luso 2006
Nota 4: Mostrámos que a curva paramétrica estendida tem as seguintes propriedades:•Define com função de• satisfaz a eq. da energia• é de classe• •Logo pela nota 1 a eq. de Euler-Lagrange é satisfeita;
Logo conclui-se que a curva ainda é uma extremal do problema da braquistócrona no cilindro horizontal.
θ(y) F −θ '∂Φ∂θ '
=C;
θ y;
C 2;θ '(y) ≠ 0;θ(y)
Luso 2006
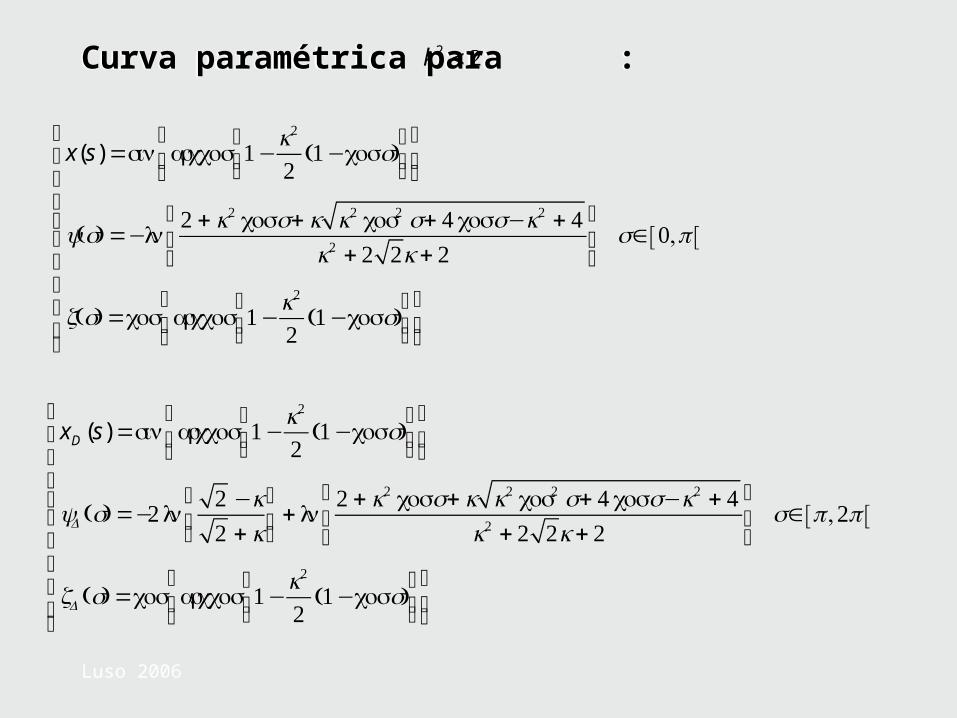
Curva paramétrica para :
x(s)=sin arccos 1−k2
21−coss( )
⎛⎝⎜
⎞⎠⎟
⎛⎝⎜
⎞⎠⎟
y(s)=−ln2 + k2 coss+ k k2 cos2 s+ 4 coss−k2 + 4
k2 + 2 2k+ 2
⎛⎝⎜
⎞⎠⎟
z(s)=cos arccos 1−k2
21−coss( )
⎛⎝⎜
⎞⎠⎟
⎛⎝⎜
⎞⎠⎟
⎧
⎨
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
s∈ 0,p[ [
k2 < 2
xD (s)=sin arccos 1−k2
21−coss( )
⎛⎝⎜
⎞⎠⎟
⎛⎝⎜
⎞⎠⎟
yD (s)=−2ln2 −k2 + k
⎛⎝⎜
⎞⎠⎟+ ln
2 + k2 coss+ k k2 cos2 s+ 4 coss−k2 + 4k2 + 2 2k+ 2
⎛⎝⎜
⎞⎠⎟s∈ p,2p[ [
zD (s)=cos arccos 1−k2
21−coss( )
⎛⎝⎜
⎞⎠⎟
⎛⎝⎜
⎞⎠⎟
⎧
⎨
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
Luso 2006
Bibliografia
•Clegg, J. C., “Calculus of variations”, Oliver & Boyal, 1968.•Davis, F. Soares, “O cálculo variacional clássico e algumas das suas aplicações à física matemática”, EDP - Eletricidade de Portugal, 1986.•Makaremko, G. I. e Kiseliov, A. I., “Calculo Variacional: (Ejemplos y problemas)”, MIR, 1976.•Hector J. Sussmann and Jan C. Willems, “300 Years of Optimal Control: from the Brachystochrone to the Maximum Principle”.













![= TOTAL HEAD METERS ca_uMN WATER [m] vs vs VS VS vs VS vs vs VS 1 R27 1 R:30 1 gaz 1 gas VS VS VS VS vs vs vs vs VS vs VS VS VS vs vs 188, 7 233, 3 us,o 7 513,3 3 121.7 221.3 276.7](https://static.documents.pub/doc/80x56/5af256f17f8b9a8b4c9006d8/-total-head-meters-caumn-water-m-vs-vs-vs-vs-vs-vs-vs-vs-vs-1-r27-1-r30-1-gaz.jpg)



