48
Sensing and Perception: Localization and positioning by Isaac Skog

Sensing and Perception: Localization and positioning
by Isaac Skog

Outline • Basic information sources and performance
measurements. • Motion and positioning sensors. • Positioning and motion tracking technologies. • Information fusion techniques. • Motion models and motion constraints. • Cooperative positioning
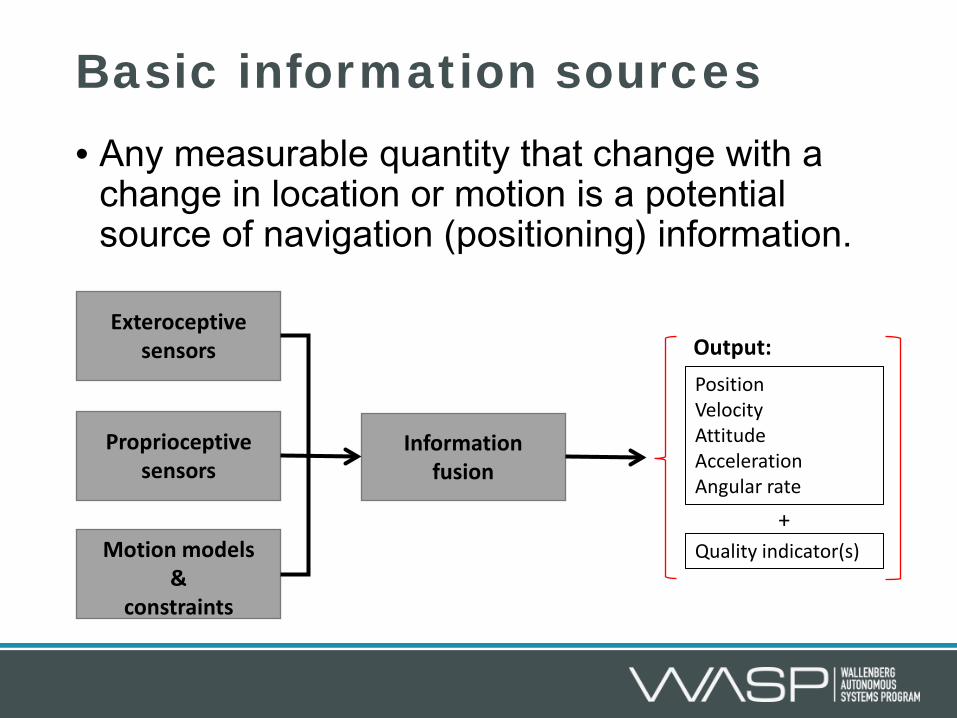
Basic information sources • Any measurable quantity that change with a
change in location or motion is a potential source of navigation (positioning) information.
Proprioceptive sensors
Exteroceptive sensors
Information fusion
Motion models &
constraints
Position Velocity Attitude Acceleration Angular rate
Quality indicator(s)
Output:
+

Performance measures
Continuity of service
The system’s probability
of continuously providing information without nonscheduled
interruptions during the intended working
period.
Availability
A measure of the percentage of the
intended coverage area in which the navigation
system works.
Integrity
A measure of the trust that can be put in the information from the
navigation system, i.e., the likelihood of
undetected failures in the specified accuracy of
the system.
Accuracy
The degree of conformity of
information concerning position, velocity, etc., provided by the system relative to actual values.
In-Car Positioning and Navigation Technologies—A Survey, I. Skog and P. Händel, IEEE Transactions on Intelligent Transportation Systems , 2009
SENSORS

Sensors Any measurable quantity that change with a change in location or motion is a potential source of navigation (positioning) information. • Electromagnetic radiation sensors
Radio receivers, cameras, laser scanners, magnetic field sensors, etc.
• Inertial sensors Accelerometers and gyroscopes
• Environmental & contact sensors Pressure, air flow, temperature sensors, wheel encoders, etc.
Extracted information can be used in multiple ways! (Physical laws or feature mapping.)
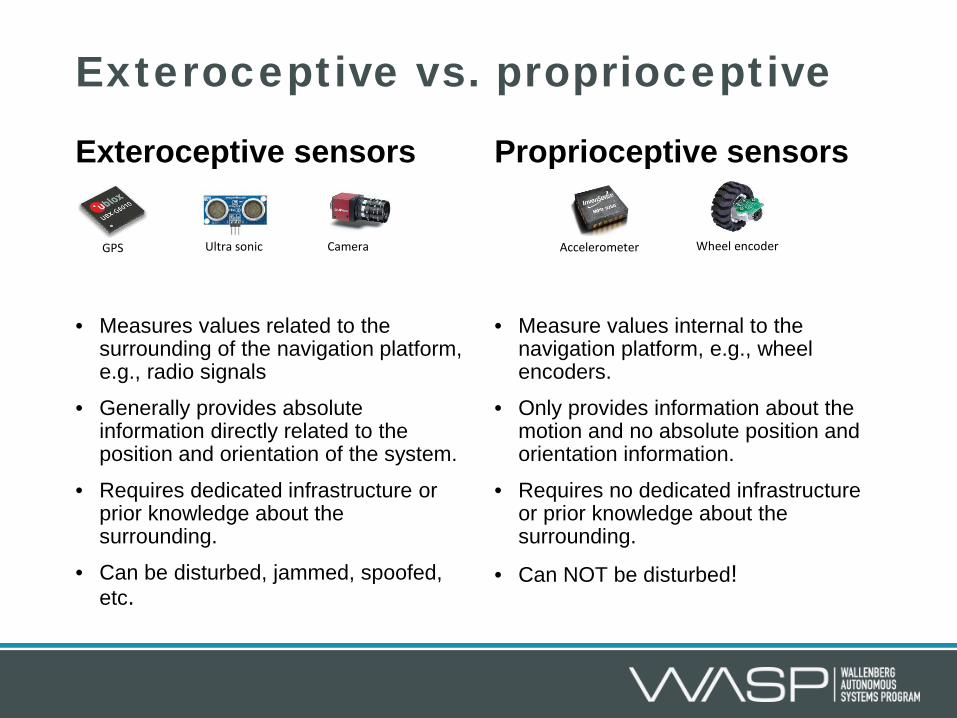
Exteroceptive sensors
• Measures values related to the surrounding of the navigation platform, e.g., radio signals
• Generally provides absolute information directly related to the position and orientation of the system.
• Requires dedicated infrastructure or prior knowledge about the surrounding.
• Can be disturbed, jammed, spoofed, etc.
Proprioceptive sensors
• Measure values internal to the navigation platform, e.g., wheel encoders.
• Only provides information about the motion and no absolute position and orientation information.
• Requires no dedicated infrastructure or prior knowledge about the surrounding.
• Can NOT be disturbed!
Exteroceptive vs. proprioceptive
GPS Ultra sonic Camera Accelerometer Wheel encoder

The frequency response of the navigation process
Frequency response of the sensor data to navigation state transformation
Positioning
system
Sensor
Sensor
Position Orientation Velocity Acceleration Angular rate ….
Exteroceptive sensor
Proprioceptive sensor
|H(f)|
f
|H(f)|
f
Position to motion dynamics Motion dynamics to position
Low frequency error amplification High frequency
error amplification
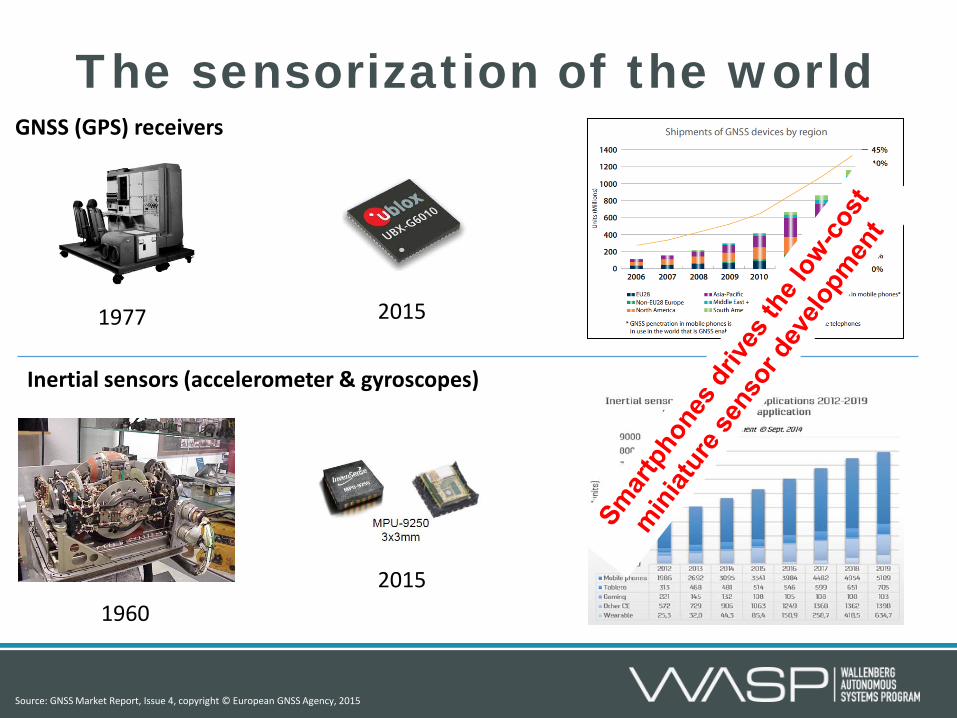
The sensorization of the world
1960 2015
1977 2015
Inertial sensors (accelerometer & gyroscopes)
GNSS (GPS) receivers
Source: GNSS Market Report, Issue 4, copyright © European GNSS Agency, 2015
Positioning techniques
North
East
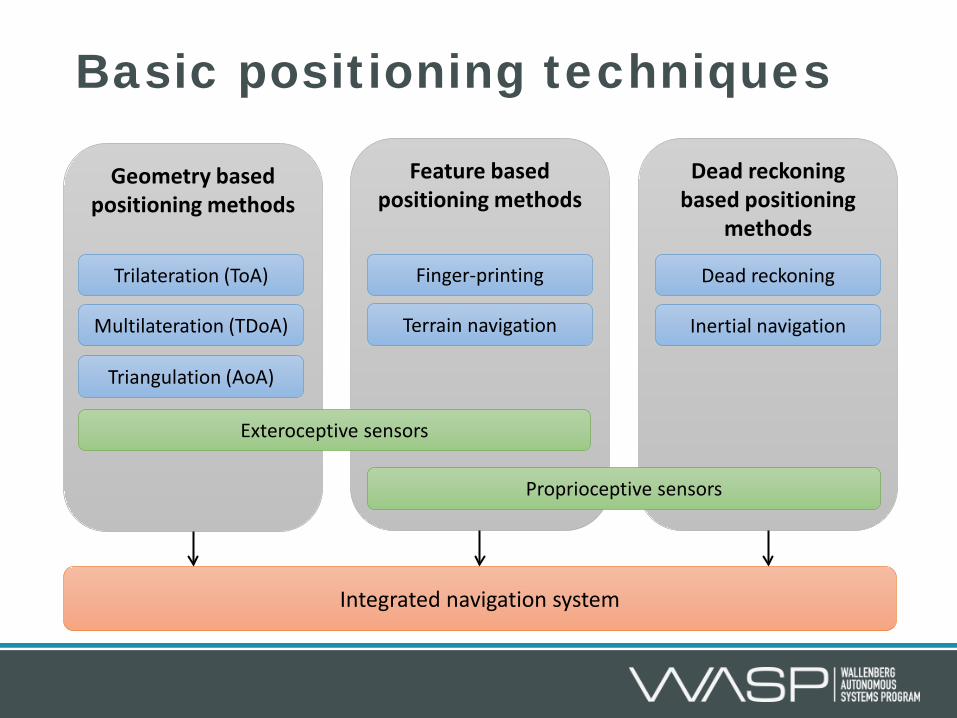
Dead reckoning based positioning
methods
Feature based positioning methods
Basic positioning techniques
Terrain navigation
Finger-printing
Proprioceptive sensors
Geometry based positioning methods
Multilateration (TDoA)
Trilateration (ToA)
Triangulation (AoA)
Dead reckoning
Inertial navigation
Exteroceptive sensors
Integrated navigation system

Feature based positioning • Most basic form of positioning. • Correlation of observed features (measured quantities) to an map
with a prior known locations of the features. • Extension: Simultaneous localization and mapping
Terrain navigation Signal strength finger printing
Indoor Localization Using Multi-Frequency RSS, M. A. Skoglund, G. Hendeby, J. Nygards, J. Rantakokko, G. Eriksson, Proc. IEEE/ION Position Location and Navigation Symposium, 2016 Terrain navigation for underwater vehicles using the correlator method, I. Nygren, and M. Jansson, IEEE Journal of Oceanic Engineering, 2004

Ex: Magnetic fingerprinting
Simultaneous localization and mapping for pedestrians using only foot-mounted inertial sensors, P. Robertson, M. Angermann, and B. Krach, Proc. of the 11th international conference on Ubiquitous computing, 2009

Accuracy of feature based positioning • The positioning accuracy
depends on several factors • Accuracy of map • Accuracy of the feature
measurements • Uniqueness of the observed features • The spatial density of the features • The travel path
• The posterior Cramér-Rao bound can be used to lower bound the achievable position accuracy for a given scenario, but also to plan the path that optimize the positioning accuracy.
Particle filters for positioning, navigation, and tracking, F. Gustafsson, et al, IEEE Transactions on Signal Processing, 2002 Posterior Cramer-Rao bounds for discrete-time nonlinear filtering, P. Tichavsky, C. H. Muravchik and A. Nehorai, IEEE Transactions on Signal Processing, 1998

Geometry based positioning • Range or angle measurements to objects with known positions can, using basic
geometry, be used for positioning. • Range measurements can be obtained from e.g., time-of-flight or signal strength
measurements. • Angular measurements can be obtained through directive antennas (antenna
arrays), rotating laser scanners, etc. • Generally requires line-of-sight measurements to the objects
Trilateration Triangulation

Accuracy of geometry based pos. The accuracy depends on: • The geometry and number of the objects (sources). • The accuracy of the range or angle measurements, which depends on the
system noise, multi-path errors, clock jitter, etc.
Range uncertainty
Range estimate
Range estimate
Position uncertainty region
Range estimate Range estimate
Position uncertainty region

Accuracy of geometry based pos.
Range uncertainty
Range estimate
Range estimate
Position uncertainty region
Range uncertainty Depends only on direction to the sources
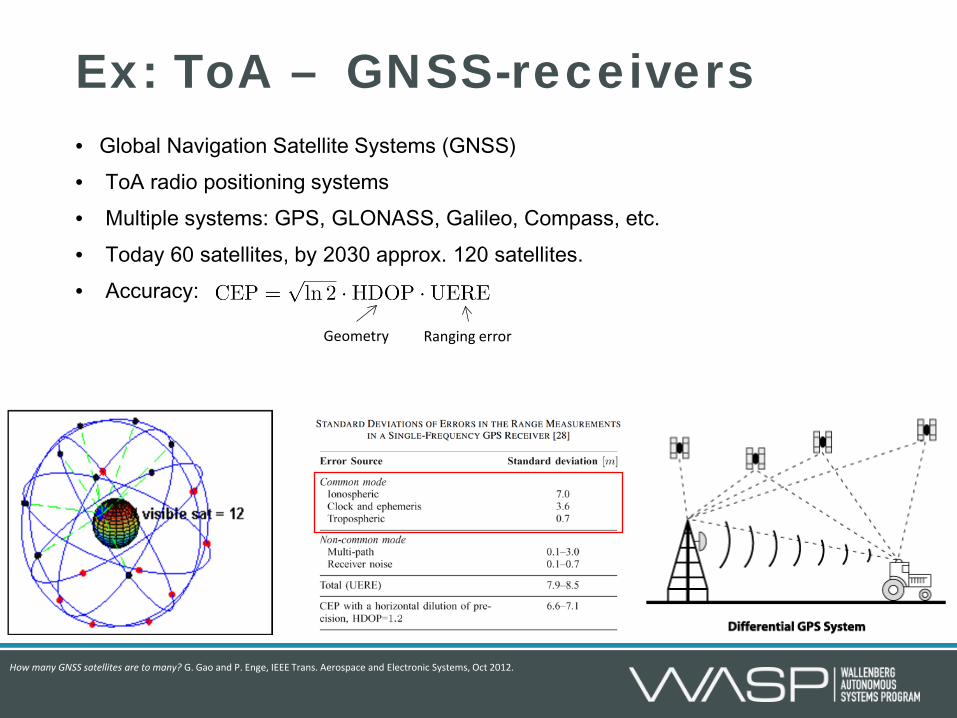
Ex: ToA – GNSS-receivers • Global Navigation Satellite Systems (GNSS) • ToA radio positioning systems • Multiple systems: GPS, GLONASS, Galileo, Compass, etc. • Today 60 satellites, by 2030 approx. 120 satellites. • Accuracy:
How many GNSS satellites are to many? G. Gao and P. Enge, IEEE Trans. Aerospace and Electronic Systems, Oct 2012.
Geometry Ranging error

• Integrative navigation process: Amplifies low frequency
measurement errors. Causes the position error to grow
without bound.
• Error sources: 1. Heading errors 2. Speed (distance errors) 3. Initial position and heading
errors
Dead reckoning based positioning
1
2
3
4
5
6
7
1 2 3 4 5 6 7
North
East
R Wheel speed sensor
Magnetic field
sensor
Heading
Speed

Inertial navigation – accelerometer
The output of an accelerometer is called specific force and is the difference between the inertial acceleration and the gravity acceleration.
Mass
0 -2 2
Stationary accelerometer Accelerometer accelerating to the right, and with the sensitivity axis orthogonal to
the gravity field.
Mass
0 -2 2 0 -2
2 M
ass
Accelerometer stationary on the earth and with the sensitivity axis aligned with
the gravity field.

Inertial navigation – gyroscope • Measures angular rate with respect to inertial space. • Several types of gyroscopes:
Spinning gyroscopes (Conversion of momentum) Optical gyroscopes (Sagnac effect) Vibratory gyroscopes (Coriolis force) Nuclear Magnetic Resonance Gyroscopes (Larmor precession frequency)
Stationary Rotating
x
y
z
Tuning fork gyroscope using the Coriolis force
Tuning fork gyroscope implemented on the
silicon of a MEMS sensor
http://industrial.panasonic.com/ww/products/sensors/sensors/angular-rate-sensors
D.E. Serrano, http://ieee-sensors2013.org/sites/ieee-
sensors2013.org/files/Serrano_Slides_Gyros2.pdf

Inertial measurement units
IMU coordinate system
IMU 3 Accelerometers
3 Gyroscopes
Navigation coordinate system Platform coordinate system
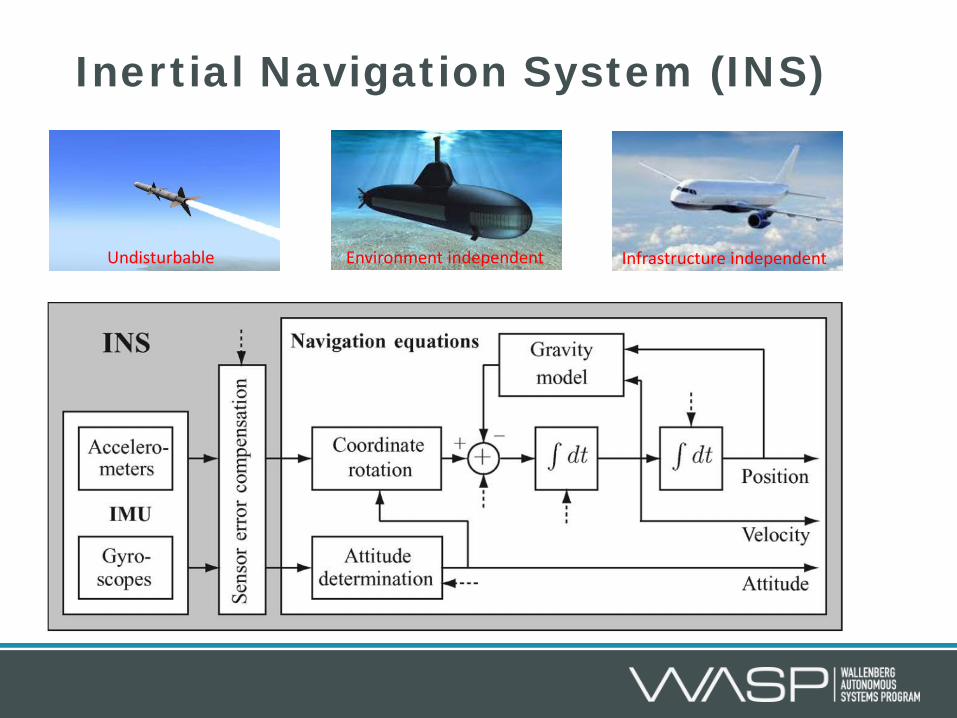
Inertial Navigation System (INS)
Undisturbable Infrastructure independent Environment independent

Inertial navigation accuracy • The positioning accuracy is mainly dependent on the gyroscope biases
(offsets). • For systems using low-cost sensors the position error is approximately
given by • For high-cost systems a Schuler feedback loop can be used and the
horizontal position error can be bounded; the vertical error is still unbounded.

Information fusion
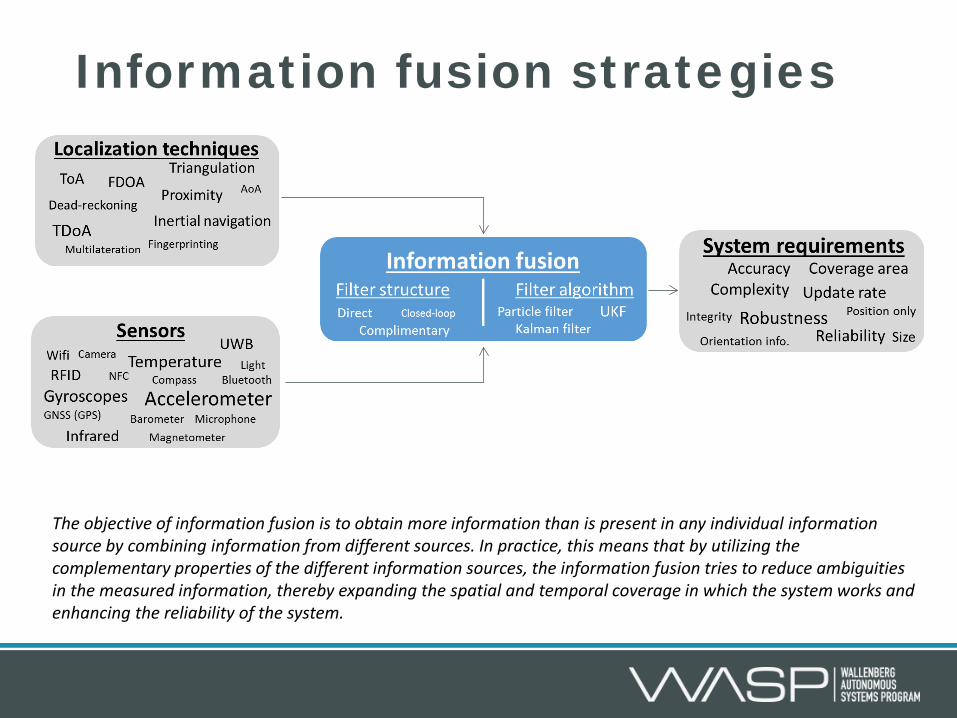
Information fusion strategies
The objective of information fusion is to obtain more information than is present in any individual information source by combining information from different sources. In practice, this means that by utilizing the complementary properties of the different information sources, the information fusion tries to reduce ambiguities in the measured information, thereby expanding the spatial and temporal coverage in which the system works and enhancing the reliability of the system.

Fusion strategies & filter algorithms
Sensor #1
Sensor #2
Information fusion
Particle filters for positioning, navigation, and tracking, F. Gustafsson, et al, IEEE Transactions on Signal Processing, 2002 Bayesian filtering for location estimation, V. Fox, J. Hightower, Lin Liao, D. Schulz and G. Borriello, IEEE Pervasive Computing, 2003
Navigation state vector
Control input Process noise
Observation noise

• Conceptually simple
• Hard to find generic motion model that fits in a stochastic framework.
• Difficult to handle attitude states that are defined on a manifold
• Undisturbable sensor as backbone
• Error dynamics of the dead reckoning process instead modelled.
• Can often easier be fit in a stochastic framework
• Attitude errors are kept small and can be approximated in R^3.
Direct & complimentary
Direct filter
Stochastic motion model
Sens
or d
ata
Navigation solution
Direct filtering Complimentary filtering
In-Car Positioning and Navigation Technologies—A Survey, I. Skog and P. Händel, IEEE Transactions on Intelligent Transportation Systems , 2009 The Global Positioning System & Inertial Navigation, J.A. Farrell and M. Barth, McGraw-Hill, 1998.
+ Complimentary filter
h(x) Prop
rioce
ptiv
e se
nsor
s
Extr
ocep
tive
sens
ors
Navigation solution Dead reckoning/INS
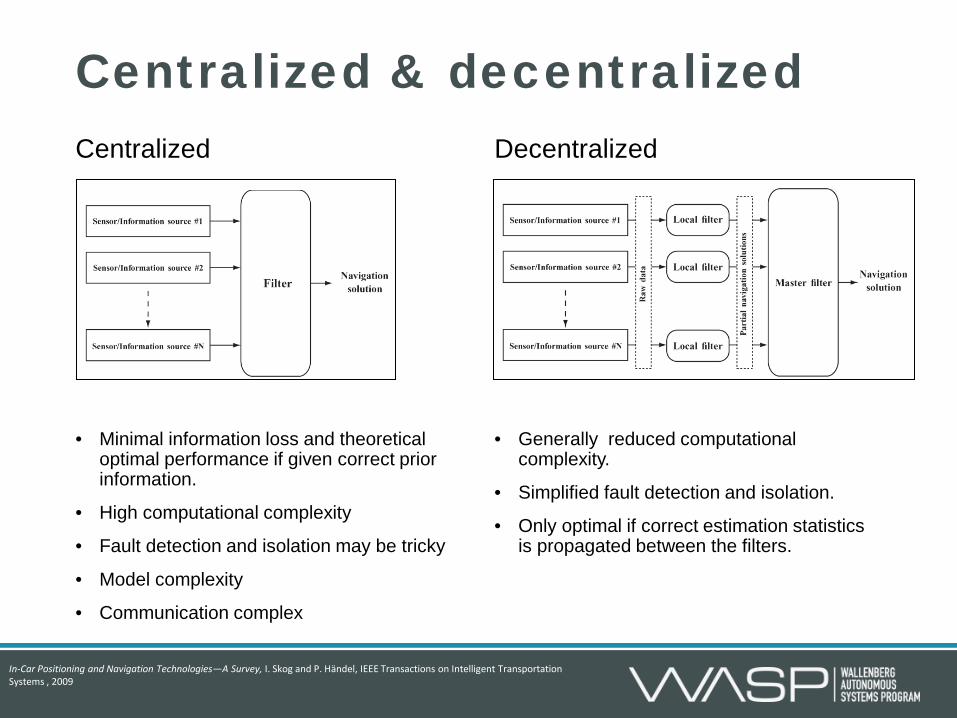
Centralized • Minimal information loss and theoretical
optimal performance if given correct prior information.
• High computational complexity
• Fault detection and isolation may be tricky
• Model complexity
• Communication complex
Decentralized • Generally reduced computational
complexity.
• Simplified fault detection and isolation.
• Only optimal if correct estimation statistics is propagated between the filters.
Centralized & decentralized
In-Car Positioning and Navigation Technologies—A Survey, I. Skog and P. Händel, IEEE Transactions on Intelligent Transportation Systems , 2009

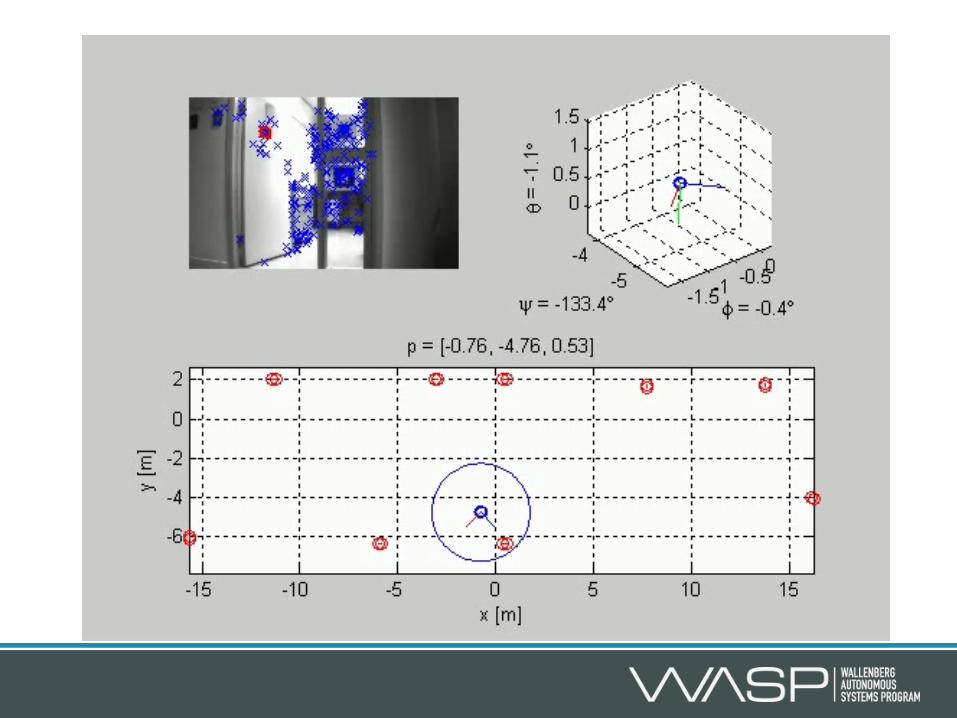
Ex: Camera aided INS
1 2 • By detecting and tracking feature points between pictures, displacement information can be extracted and used to aid the INS and reduce the error drift.
• By detecting feature points, e.g.,
QR tags, with known locations absolute position estimates can be obtained and used to bound the error of the INS.

Ex: Camera aided INS (2)
Inertial navigation
process
+ Complimentary filter
h(x)
Navigation solution IMU
Camera Feature
point extraction
Camera-aided inertial navigation using epipolar points, D. Zachariah, and M. Jansson, IEEE/ION Position Location and Navigation Symposium (PLANS), 2010
• Complimentary filtering (Inertial navigation system used as backbone) • Proprioceptive sensors: Accelerometers and gyroscopes • Exteroceptive sensor: Camera

Motion models
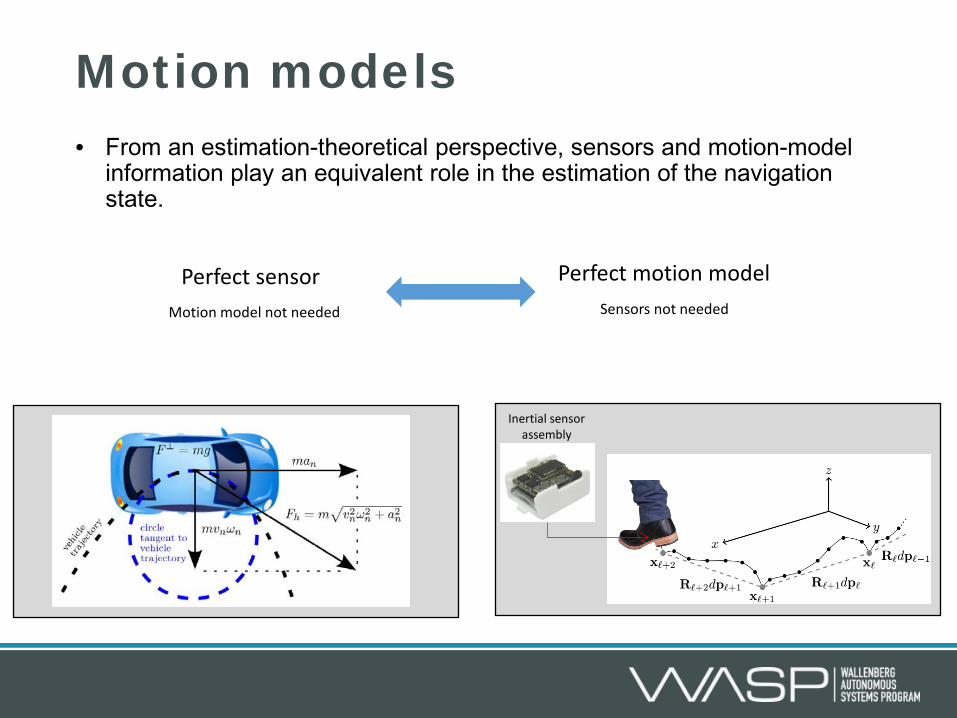
Motion models • From an estimation-theoretical perspective, sensors and motion-model
information play an equivalent role in the estimation of the navigation state.
Inertial sensor assembly
Perfect sensor Perfect motion model Motion model not needed Sensors not needed
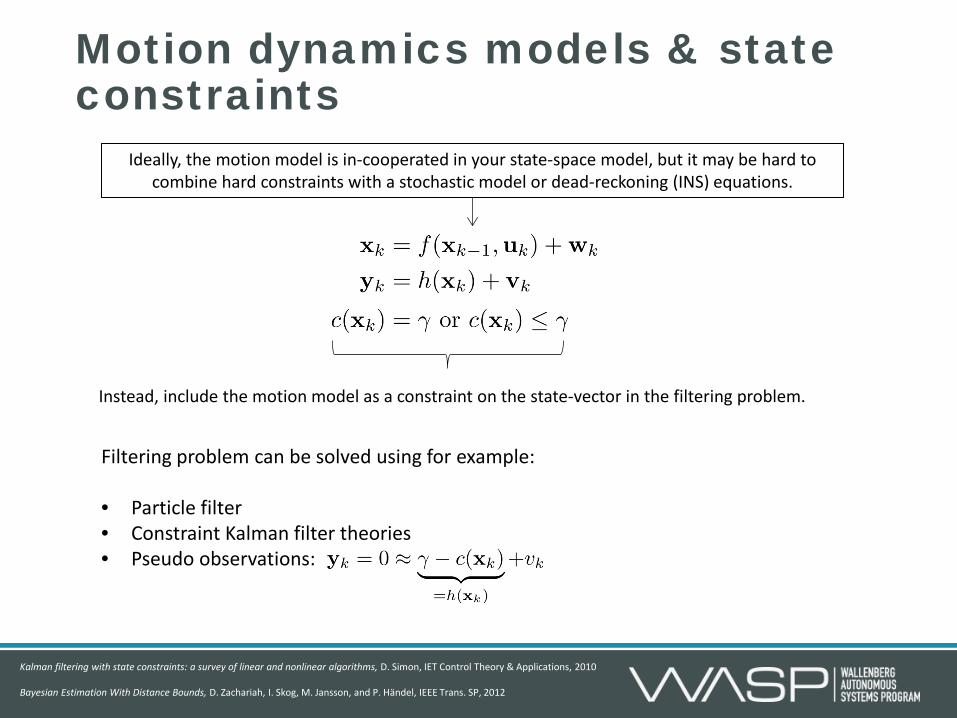
Motion dynamics models & state constraints
Kalman filtering with state constraints: a survey of linear and nonlinear algorithms, D. Simon, IET Control Theory & Applications, 2010 Bayesian Estimation With Distance Bounds, D. Zachariah, I. Skog, M. Jansson, and P. Händel, IEEE Trans. SP, 2012
Ideally, the motion model is in-cooperated in your state-space model, but it may be hard to combine hard constraints with a stochastic model or dead-reckoning (INS) equations.
Instead, include the motion model as a constraint on the state-vector in the filtering problem.
Filtering problem can be solved using for example: • Particle filter • Constraint Kalman filter theories • Pseudo observations:

Ex: Zero-velocity aided INS (1)
Foot mounted INS
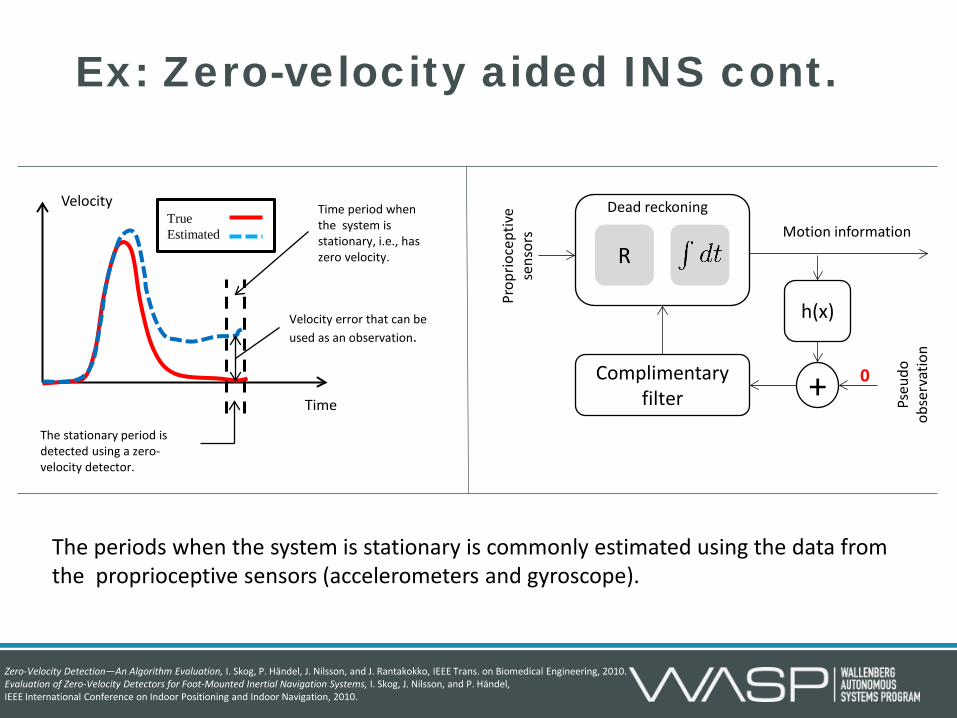
Ex: Zero-velocity aided INS cont.
+ Complimentary filter
h(x)
Prop
rioce
ptiv
e se
nsor
s
Pseu
do
obse
rvat
ion
Motion information
R
Dead reckoning Velocity
Time
True Estimated
Time period when the system is stationary, i.e., has zero velocity.
Velocity error that can be used as an observation.
The stationary period is detected using a zero-velocity detector.
0
The periods when the system is stationary is commonly estimated using the data from the proprioceptive sensors (accelerometers and gyroscope).
Zero-Velocity Detection—An Algorithm Evaluation, I. Skog, P. Händel, J. Nilsson, and J. Rantakokko, IEEE Trans. on Biomedical Engineering, 2010. Evaluation of Zero-Velocity Detectors for Foot-Mounted Inertial Navigation Systems, I. Skog, J. Nilsson, and P. Händel, IEEE International Conference on Indoor Positioning and Indoor Navigation, 2010.

Ex: Zero-velocity aided INS cont.
Motion constraint +
INS Step motion
Estimated position
Foot-mounted INS for everybody - an open-source embedded implementation, J. Nilsson, I. Skog, P. Händel, and K.V.S Hari, IEEE/ION Position Location and Navigation Symposium (PLANS), 2012
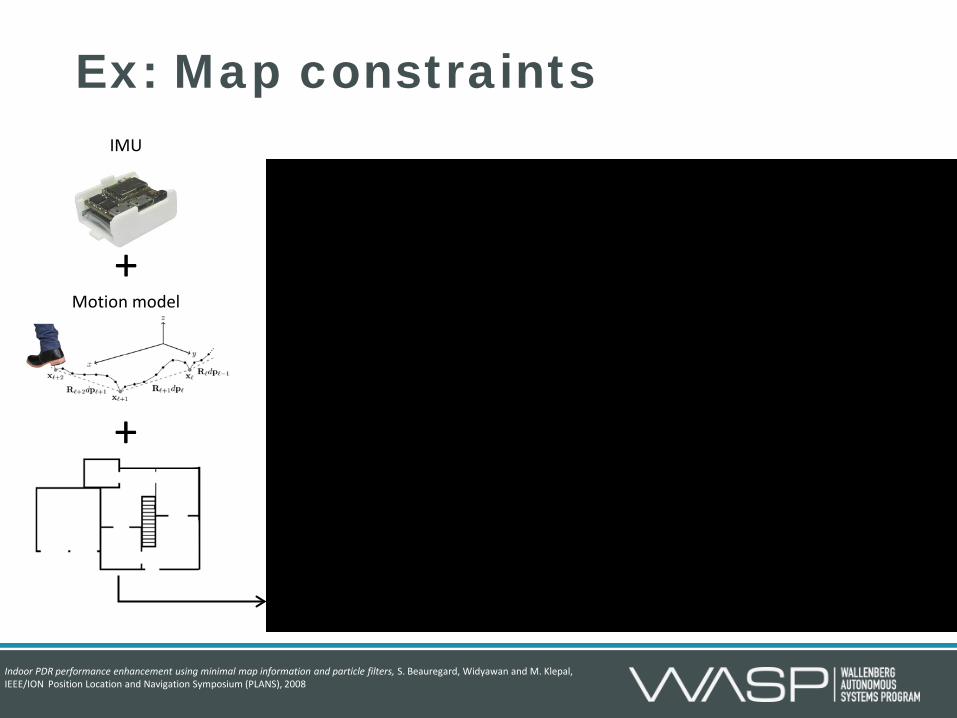
Ex: Map constraints
Motion model +
IMU
+
Indoor PDR performance enhancement using minimal map information and particle filters, S. Beauregard, Widyawan and M. Klepal, IEEE/ION Position Location and Navigation Symposium (PLANS), 2008

Cooperative positioning

Basic idea
1
2
3
4
5
6
7
1 2 3 4 5 6 7
North
East
uncertainty ellipse
Local navigation
system
Local navigation
system
Local navigation
system
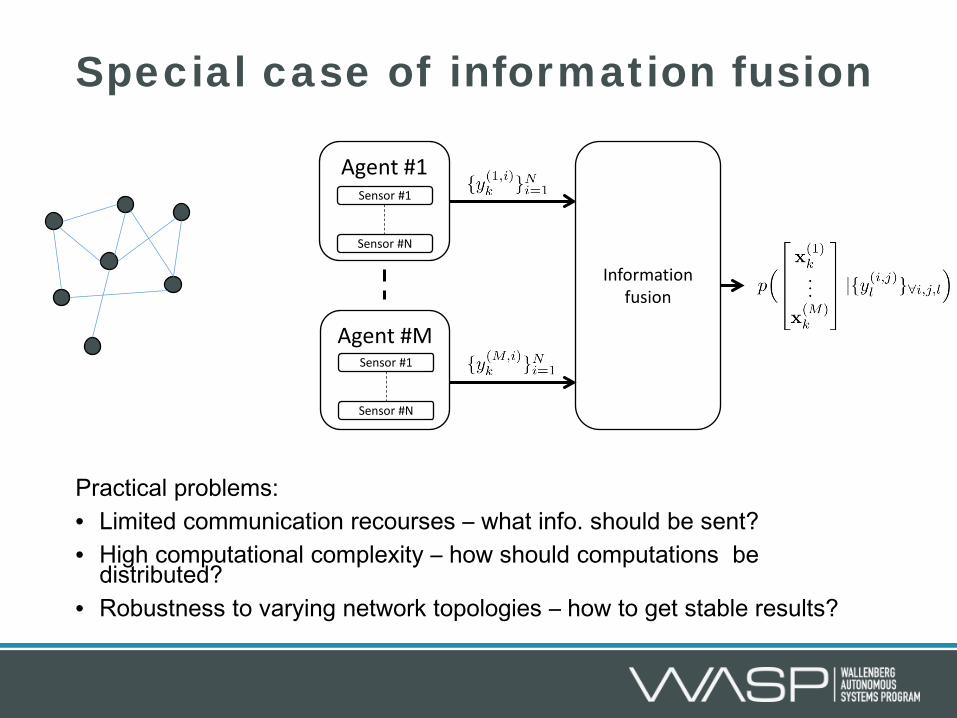
Special case of information fusion
Practical problems: • Limited communication recourses – what info. should be sent? • High computational complexity – how should computations be
distributed? • Robustness to varying network topologies – how to get stable results?
Sensor #1
Sensor #N
Information fusion
Agent #1
Sensor #1
Sensor #N
Agent #M

Example: First responder positioning
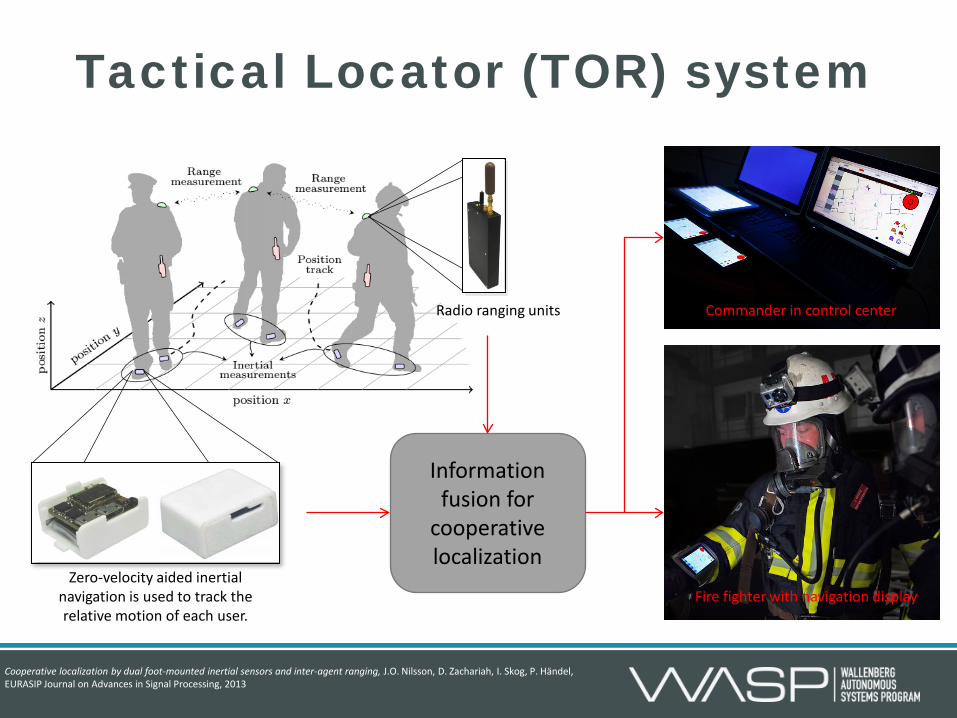
Tactical Locator (TOR) system
Zero-velocity aided inertial navigation is used to track the relative motion of each user.
Radio ranging units Commander in control center
Fire fighter with navigation display
Information fusion for
cooperative localization
Cooperative localization by dual foot-mounted inertial sensors and inter-agent ranging, J.O. Nilsson, D. Zachariah, I. Skog, P. Händel, EURASIP Journal on Advances in Signal Processing, 2013
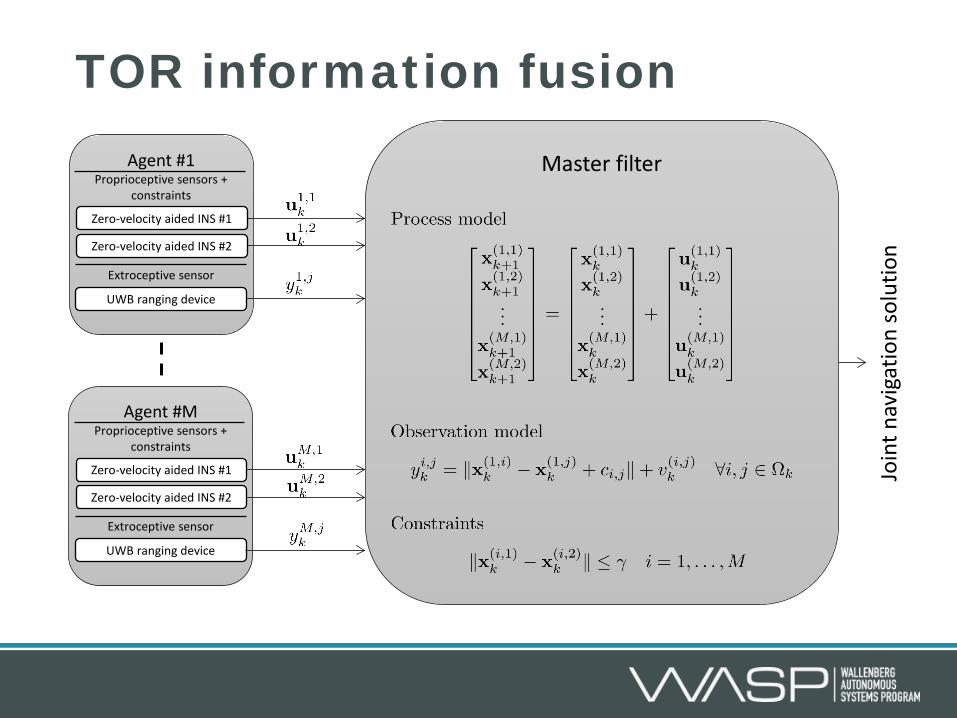
TOR information fusion Agent #1
Proprioceptive sensors + constraints
Extroceptive sensor sensors
Zero-velocity aided INS #1
Zero-velocity aided INS #2
UWB ranging device
Agent #M Proprioceptive sensors +
constraints
Extroceptive sensor sensors
Zero-velocity aided INS #1
Zero-velocity aided INS #2
UWB ranging device
Master filter
Join
t nav
igat
ion
solu
tion

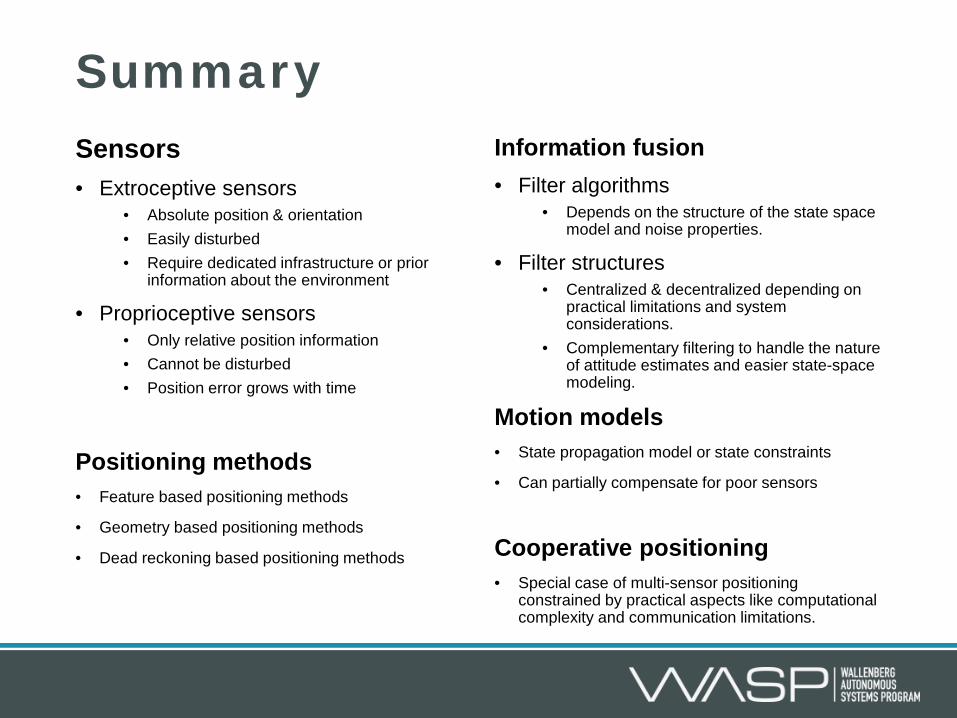
Sensors • Extroceptive sensors
• Absolute position & orientation • Easily disturbed • Require dedicated infrastructure or prior
information about the environment
• Proprioceptive sensors • Only relative position information • Cannot be disturbed • Position error grows with time
Positioning methods • Feature based positioning methods
• Geometry based positioning methods
• Dead reckoning based positioning methods
Information fusion • Filter algorithms
• Depends on the structure of the state space model and noise properties.
• Filter structures • Centralized & decentralized depending on
practical limitations and system considerations.
• Complementary filtering to handle the nature of attitude estimates and easier state-space modeling.
Motion models • State propagation model or state constraints
• Can partially compensate for poor sensors
Cooperative positioning • Special case of multi-sensor positioning
constrained by practical aspects like computational complexity and communication limitations.
Summary
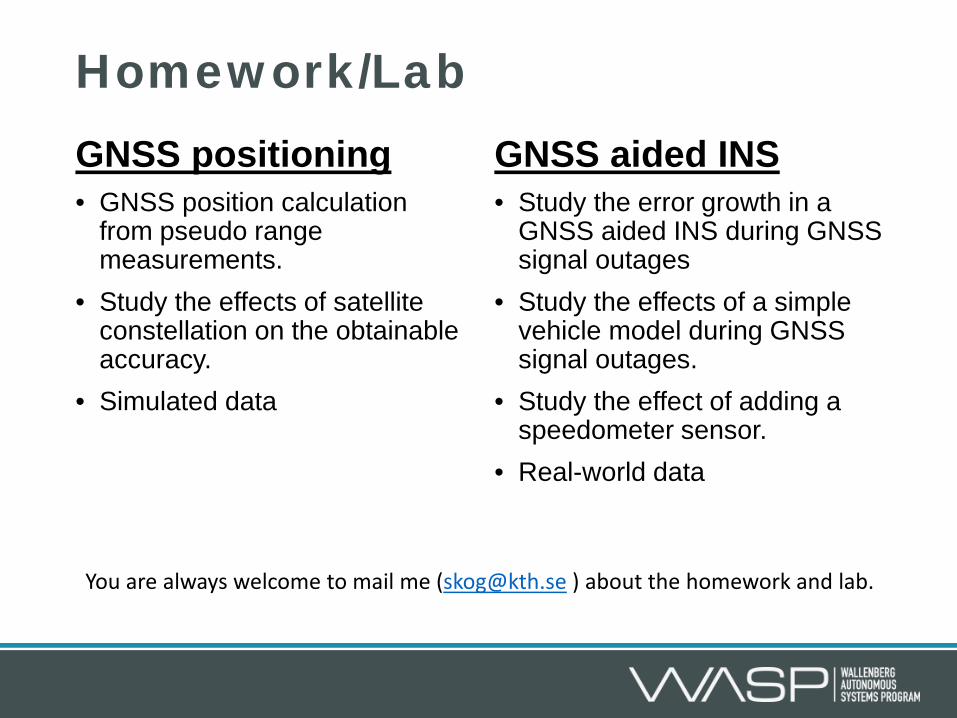
GNSS positioning • GNSS position calculation
from pseudo range measurements.
• Study the effects of satellite constellation on the obtainable accuracy.
• Simulated data
GNSS aided INS • Study the error growth in a
GNSS aided INS during GNSS signal outages
• Study the effects of a simple vehicle model during GNSS signal outages.
• Study the effect of adding a speedometer sensor.
• Real-world data
Homework/Lab
You are always welcome to mail me ([email protected] ) about the homework and lab.

















