CÁLCULO I Santiago Relos Departamento de Matemáticas Facultad de Ciencias y Tecnología Universidad Mayor de San Simón Departamento de Ciencias Exactas Universidad Privada Boliviana Cochabamba, Bolivia 2007
Transcript
CÁLCULO I
Santiago RelosDepartamento de Matemáticas
Facultad de Ciencias y TecnologíaUniversidad Mayor de San SimónDepartamento de Ciencias ExactasUniversidad Privada Boliviana
En la larga historia de los números se pueden ver varias formas de introducir el estudio de losnúmeros reales. Matemáticos como Karl Weierstrass (1815-1897), George Cantor (1845-1918)y Richard Dedekind (1831-1916) se dedicaron a esta tarea. En 1889 el matemático italianoGuiseppe Peano (1858-1932) da un listado de cinco axiomas para los enteros positivos. Eneste capítulo se da una breve introducción del sistema de los números reales.
1.1.1 Axiomas iniciales
El Sistema de números reales es un conjunto R cuyos elementos se llaman números. Seasume la existencia de dos operaciones llamadas adición y multiplicación denotados por +y · respectivamente tal que para cada par de números x y y formamos la suma x + y quenuevamente es un número, similarmente formamos el producto x ·y (o xy) y nuevamente es unnúmero. Lo anterior se indica diciendo que R es cerrado para la operación suma y producto.Aceptamos que la suma y producto están univocamente determinadas, esto es, x + y, y xyson únicos. En R se satisfacen los siguientes axiomas:
• Axioma 1 Conmutatividad. Para todo x, y ∈ R
x+ y = y + x, xy = yx
• Axioma 2 Asociatividad. Para todo x, y, z ∈ R
x+ (y + z) = (x+ y) + z, x(yz) = (xy)z
• Axioma 3 Distributividad. Para todo x, y, z ∈ R
x(y + z) = xy + xz
7
8 CAPÍTULO 1. LOS NÚMEROS REALES (EN PRUEBA)
• Axioma 4(a) Existencia de la identidad. Existe un elemento en R denotado por 1 (esllamado uno) tal que para todo x ∈ R
x · 1 = x
• Axioma 4(b) Existencia del neutro. Existe un elemento en R denotado por 0 (esllamado cero) tal que para todo x ∈ R
x+ 0 = x
• Axioma 5 Existencia de negativos. Para cada número x, existe un número y tal que
x+ y = 0
• Axioma 6 Existencia de recíprocos. Para cada número x �= 0, existe un número y talque
xy = 1
Todas las leyes del álgebra elemental pueden deducirse a partir de los anteriores axiomas.A continuación se muestran las más usuales.
Ley de cancelación
Teorema 1.1 Si a+ b = a+ c, entonces b = c, en particular, esto muestra que el número 0del axioma 4(b) es único.
Demostración. Supóngase que a+ b = a+ c. Por el axioma 5 existe un númeroy tal que a+ y = 0. Puesto que la suma está univocamente determinada se tieney+(a+ b) = y+(a+ c). Usando el axioma 2: (y + a)+ b = (y + a)+ c, de donde0+b = 0+c, y por el axioma 4(b) b = c. Observemos que si existe un otro número0′ tal que 0′ + x = x para todo número x, entonces en particular 0′ + 0 = 0, perotambién por el axioma 4(b) 0+ 0 = 0, luego 0′+0 = 0+ 0, de donde 0′ = 0. Estomuestra que el cero definido en el axioma 4(b) es único.�
Posibilidad de sustracción
Teorema 1.2 Dados los números a, b existe un único número x tal que a + x = b. Estenúmero se denota con b− a. En particular 0− a se escribe como −a y es llamado Negativode a (también se llama menos de a).
Demostración. Existe un número y tal que a+ y = 0. Sea x = b+ y, entonces
a+ x = a+ (b+ y)
Ahora usando los axiomas 1 y 2 se deduce a+x = b+(a+ y) , por tanto a+x = b+0,esto es, a+ x = b.�
Observación. Observemos que a+ (−a) = 0.
1.1. LA RECTA REAL 9
Teorema 1.3 Para todo a, b ∈ R, b− a = b+ (−a).
Demostración. Sea x = b − a, por definición de sustracción b = x + a. Seay = b+ (−a), entonces
y + a = [b+ (−a)] + a = b+ [(−a) + a] = b+ 0 = b
de este resultado junto con x+ a = b se concluye que x+ a = y+ a. Por la ley decancelación se tiene x = y, esto prueba el teorema.�
Teorema 1.4 Para todo a ∈ R se tiene − (−a) = a.
Demostración. Se tiene a + (−a) = 0, luego por definición a = 0 − (−a), dedonde el resultado sigue.
�
Teorema 1.5 Para todo a ∈ R se cumple a · 0 = 0.
Teorema 1.6 Para todo a, b ∈ R se tiene a (−b) = −ab.
Demostración. ab+ a (−b) = a [b+ (−b)] = a0 = 0, luego a (−b) = −ab.�
Teorema 1.7 Para todo a, b, c ∈ R se verifica a (b− c) = ab− ac.
Demostración. a (b− c) = a [b+ (−c)] = ab+ a (−c) = ab− ac.�
Ley de cancelación para la multiplicación
Teorema 1.8 Si ab = ac y a �= 0, entonces b = c. (En particular esto muestra que el número1 definido en 4(a) es único).
Demostración. Supongamos que ab = ac. Por el axioma 6 existe un número ytal que ay = 1, por tanto y(ab) = y(ac), esto es, (ya)b = (ya)c, luego 1b = 1c, dedonde b = c.�
10 CAPÍTULO 1. LOS NÚMEROS REALES (EN PRUEBA)
Posibilidad de división
Teorema 1.9 Dados a, b con a �= 0, existe exactamente un x ∈ R tal que ax = b. El número
x es denotado porb
ao b/a y es llamado cociente de b y a, en particular,
1
aes denotado por
a−1 y es llamado el recíproco de a.
Teorema 1.10 Si a �= 0, entoncesb
a= ba−1.
Teorema 1.11 Si a �= 0, entonces (a−1)−1= a.
Teorema 1.12 Si ab = 0, entonces a = 0 o b = 0.
Teorema 1.13 Si b �= 0 y d �= 0, entoncesa
b+c
d=ad+ bc
bd.
Teorema 1.14 Si b �= 0 y d �= 0, entoncesa
b· cd=a · cb · d .
Teorema 1.15 Si b �= 0, c �= 0 y d �= 0, entonces
a
bc
d
=ad
bc
Ejercicios propuestos
1. Pruebe los teoremas que no presentan demostración
Probar los siguientes resultados
2. −0 = 0.3. 1−1 = 1.
4. − (a+ b) = −a− b.5. − (a− b) = −a+ b.6. (a− b) + (b− c) = (a− c).7. Si b �= 0 y a �= 0, entonces (ab)−1 = a−1b−1.
8. Si b �= 0, −(ab
)=
(−ab
)=
(a
−b
).
9. Si b �= 0 y d �= 0, entonces ab− c
d=ad− bcbd
.
10.a
b=c
dsi y solamente si ad = bc, bd �= 0.
1.1. LA RECTA REAL 11
1.1.2 Axiomas de orden
Los axiomas del 1 al 6 no dicen nada sobre ”comparar ” los números en el sentido de ”quenúmero es más grande que otro” cuando se toman dos números. En esta sección se presentanaxiomas que permitirán, en el anterior sentido, comparar dos números.
Supondremos la existencia de un subconjunto R+ ⊂ R llamado el conjunto de los númerospositivos que satisface los siguientes axiomas:
Axioma 7. Si x, y ∈ R+ entonces x+ y ∈ R+ y xy ∈ R+.Axioma 8. Para cada real x : o x = 0 o x ∈ R+ o −x ∈ R+ de manera excluyente,es decir, se cumple una y solamente una de las afirmaciones.
Se definen ahora los símbolos < (menor), > (mayor), ≤ (menor o igual) y ≥ (mayor oigual).
x < y significa y − x ∈ R+y > x significa x < yx ≤ y significa x < y ∨ x = yy ≥ x significa x ≤ y
Si x > 0, claramente que x ∈ R+, esto es, x es positivo si y solo si x > 0. Si x ≥ 0 diremosque x es no negativo. Si x < 0 diremos que x es negativo, el conjunto de los reales negativosse denota con el símbolo R− y está definido por:
R− ={−x : x ∈ R+
},
los números x ≤ 0 se llaman no positivos.Las propiedades más importantes que son consecuencia de los anteriores axiomas se pre-
sentan en los siguientes teoremas.
Ley de la tricotomia
Teorema 1.16 Para dos números reales arbitrarios a, b ocurre exactamente una de las si-guientes afirmaciones: a = b o a < b, o b < a.
Demostración. Sigue del axioma 8 con x = b− a.�
Ley transitiva
Teorema 1.17 Si a < b y b < c, entonces a < c.
12 CAPÍTULO 1. LOS NÚMEROS REALES (EN PRUEBA)
Otros resultados
Teorema 1.18 Si a < b y c es un número arbitrario, entonces a+ c < b+ c.
Demostración. Sean x = b+ c, y = a+ c. De esto se obtiene x− y = b− a > 0,luego x− y > 0, es decir x > y, esto prueba el teorema.�
Teorema 1.19 Si a < b y c > 0, entonces ac < bc.
Teorema 1.20 Si a < b y c < 0, entonces ac > bc.
Demostración. Si a < b, b−a ∈ R+. Por otra parte si c < 0, −c ∈ R+ por tanto(−c) (b− a) = ac− bc ∈ R+, esto es, ac > bc.
�
Teorema 1.21 Si a �= 0, entonces a2 > 0.
Teorema 1.22 1 > 0.
Teorema 1.23 Si a < b, entonces −a > −b. En particular si a < 0, entonces −a > 0.
Teorema 1.24 Si ab > 0, entonces a y b ambos son positivos o ambos negativos.
Demostración. Supongamos que la conclusión del teorema es falsa, sin pérdidade generalidad podemos suponer que a < 0 y b > 0. De este hecho tenemos−a > 0 luego (−a) b = − (ab) > 0, esto es contradictorio, luego a y b son ambospositivos o ambos negativos.�
Teorema 1.25 Si a < b y c < d, entonces a+ c < b+ d.
1.2. INTERVALOS 13
Ejercicios propuestos
1. Pruebe los teoremas que no presentan demostración.
Probar:
2. No existe un número real a tal que a2 + 1 = 0.
3. La suma de dos números negativos es negativo.
4. Si a > 0, entonces1
a> 0; si a < 0, entonces
1
a< 0.
5. Si 0 < a < b, entonces 0 < b−1 < a−1.
6. Si a ≤ b y b ≤ c, y a = c, entonces b = c.
7. Para todo a, b se tiene a2 + b2 ≥ 0. Si a y b no son ambos cero, entonces a2 + b2 > 0
8. No existe un número real a tal que x ≤ a para todo real x.
9. Si x tiene la propiedad de que 0 ≤ x ≤ h para cada real positivo h, entonces x = 0.
10. Si b ≥ 0, entonces x2 > b si y solamente si x >√b o x < −
√b.
11. Si b ≥ 0, entonces x2 < b si y solamente si o −√b < x <
√b.
1.1.3 Números Naturales, Enteros y Racionales
Existen en R ciertos subconjuntos cuya existencia no se demuestra en este texto por nocorresponder a un primer curso de Cálculo, estos conjuntos son los Naturales, Enteros yRacionales que se representan respectivamente por N, Z, Q. Estos conjuntos son:N = {1, 2, 3, 4, ...}Z = {...,−4,−3,−2,−1, 0, 1, 2, 3, 4, ...}Q =
{p
q: p, q ∈ Z ∧ q �= 0
}
Observemos que N ⊂ Z ⊂ Q ⊂ R. Los números que están en R pero no en Q se llamannúmeros irracionales, este conjunto se representa por Qc. En el apéndice I se prueba queQc �= ∅.
Para un estudio completo de los números reales es necesario enunciar un ultimo axioma,este es llamado el axioma del supremo que se puede ver en el apéndice I.
1.2 Intervalos
En cálculo, los conjuntos de uso más frecuente son los intervalos, estos se definen comoconjuntos que satisfacen ciertas desigualdades.
14 CAPÍTULO 1. LOS NÚMEROS REALES (EN PRUEBA)
Definición 1.26 (Intervalo abierto) Dados dos números a, b tales que a < b. El conjunto{x ∈ R : a < x < b} se llama intervalo abierto y se denota con (a, b), esto es,
(a, b) = {x ∈ R : a < x < b} ,
su representación gráfica es:
a b
observemos que los números a y b no pertenecen al conjunto (a, b). También notemos que sia = b, se tiene (a, b) = ∅.
Definición 1.27 (Intervalo cerrado) Dados dos números a, b tales que a ≤ b. El conjunto{x ∈ R : a ≤ x ≤ b} se llama intervalo cerrado y se denota con [a, b], esto es,
[a, b] = {x ∈ R : a ≤ x ≤ b} ,
este conjunto se puede representar gráficamente del siguiente modo
a b
observemos que los números a y b pertenecen al conjunto [a, b].
Definición 1.28 (Intervalo semi-abierto o semi-cerrado) Dados dos números a, b talesque a ≤ b. Los conjuntos
[a, b) = {x ∈ R : a ≤ x < b} y(a, b] = {x ∈ R : a < x ≤ b}
se llaman intervalos semi-abiertos o semi-cerrados. Gráficamente se representan respectiva-mente por:
a b
a b
De manera similar definimos los intervalos infinitos:
(a,∞) = {x ∈ R : x > a}[a,∞) = {x ∈ R : x ≥ a}(−∞, b) = {x ∈ R : x < b}(−∞, b] = {x ∈ R : x ≤ b}(−∞,∞) = R,
1.2. INTERVALOS 15
estos intervalos respectivamente se representan gráficamente por:
a ∞
a ∞
−∞ b
−∞ b
∞−∞
Ejercicios propuestos
En los siguientes ejercicios realizar las operaciones que se indican
1. (0, 3) ∩ (1, 5) Sol.: (1, 3)
2.{[1
2, 3
]∪ [4, 10)
}∩ [2, 8) Sol.: [2, 3] ∪ [4, 8)
3.[1
2, 3
]∩ [4, 10) ∩ [2, 8) Sol.: ∅
4.[1
2, 3
]∪ {[4, 10) ∩ [2, 8)} Sol.:
[1
2, 3
]∪ [4, 8)
5.(√2, 6)∩(π2, 10)
Sol.:(π2, 6)
6. {(2, 6) ∪ (6, 8]} ∩[
4,
√200
2
]
Sol.: [4, 6) ∪ (6, 8]
7. ∩∞k=1[1 +
1
k, 5 +
1
4
]Sol.:
[2,21
4
]
8. ∩∞k=1[1− 1
k, 5 +
1
4
]Sol.:
(1,21
4
]
16 CAPÍTULO 1. LOS NÚMEROS REALES (EN PRUEBA)
1.3 Valor absoluto
El valor absoluto de un número es la distancia del número al cero, así el valor absoluto de5 es 5, similarmente, puesto que la distancia de −5 a 0 es 5, el valor absoluto de −5 es 5.De esta definición intuitiva deducimos que el valor absoluto de un número es un número nonegativo. A continuación definimos formalmente el concepto de valor absoluto.
Definición 1.29 El valor absoluto de un número real a se define por la regla:
|a| ={
a si a ≥ 0−a si a < 0
Ejemplo 1.1 |5| = 5, |−7| = − (−7) = 7, |0| = 0
De la definición anterior se deduce inmediatamente el siguiente teorema:
Teorema 1.30 Para cualquier a ∈ R se tiene:
1. |a|2 = a2,
2. |a| = |−a|,
3. − |a| ≤ a ≤ |a|.
El valor absoluto además tiene las siguientes propiedades
|a| ≥ 0|a| = 0 si y solo si a = 0|a+ b| ≤ |a|+ |b| para cualesquiera a, b ∈ R|ab| = |a| |b|
Establecemos estas propiedades en los siguientes teoremas. Se demuestran algunas, dejandoal lector la demostración de las restantes.
Teorema 1.31 Para cualquier a ∈ R, |a| ≥ 0.
Teorema 1.32 |a| = 0 si y solo si a = 0.
Desigualdad triangular
Teorema 1.33 |a+ b| ≤ |a|+ |b| para cualesquiera a, b ∈ R
luego: |a− b| ≤ |a|+ |b| .Teorema 1.34 Sea x, k ∈ R, k > 0, entonces |x| ≤ k, si y solamente si
−k ≤ x ≤ k.
Teorema 1.35 Sea x, k ∈ R, k > 0, entonces |x| ≥ k, si y solamente si
x ≤ −k o x ≥ k.
Teorema 1.36 Para cualesquiera a, b ∈ R, |a− b| ≥ |a| − |b|.
Demostración. En la demostración se hace uso de la desigualdad triangular.
|a| = |(a− b) + (b)|≤ |a− b|+ |b|
luego |a− b| ≥ |a| − |b|.�
Teorema 1.37 Para cualesquiera a, b ∈ R, | |a| − |b| | ≤ |a− b|.
Demostración.Por el teorema anterior |a| − |b| ≤ |a− b|. Por otra parte
|b| − |a| ≤ |b− a|= |a− b|
de donde − |a− b| ≤ |a| − |b|, de estos resultados se tiene
− |a− b| ≤ |a| − |b| ≤ |a− b| ,esto es:
||a| − |b|| ≤ |a− b| .�
18 CAPÍTULO 1. LOS NÚMEROS REALES (EN PRUEBA)
Teorema 1.38 Para todo a, b ∈ R, |a+ b| ={
a+ b si a ≥ −b−a− b si a < −b
Ejercicios resueltos
Ejercicio 1.1 Resolver |3x+ 5| = 2.
Solución. Por definición de valor absoluto tenemos
|3x+ 5| ={3x+ 5 si 3x+ 5 ≥ 0− (3x+ 5) si 3x+ 5 < 0
o bien
|3x+ 5| =
3x+ 5 si x ≥ −53
− (3x+ 5) si x < −53
El número −53divide a la recta real en dos intervalos, a saber,
(−∞,−5
3
)y[−53,∞). por
tanto tenemos dos casos a discutir:
(a) x ∈(−∞,−5
3
). En este caso la ecuación a resolver es
− (3x+ 5) = 2
resolviendo, encontramos la solución x = −73∈(−∞,−5
3
).
(b) x ∈[−53,∞). En este caso la ecuación a resolver es
3x+ 5 = 2
resolviendo, encontramos la solución x = −1 ∈[−53,∞).
De (a) y (b) concluimos que la solución es el conjunto{−73,−1}.
Método abreviado. Consiste en ignorar los intervalos en donde se está trabajando. Enel ejemplo tenemos dos posibilidades:
(a) 3x+5 < 0. En este caso se tiene − (3x+ 5) = 2, de donde x = −73, este número satisface
la ecuación dada.
1.3. VALOR ABSOLUTO 19
(b) 3x + 5 ≥ 0. En este caso se tiene 3x + 5 = 2, de donde x = −1, este número tambiénsatisface la ecuación dada.
De (a) y (b) la solución es el conjunto{−73,−1}.
Ejercicio 1.2 Resolver |x2 − 4x+ 3| = 3.
Solución. Usaremos el método abreviado. Tenemos dos casos a discutir:
(a) x2−4x+3 < 0, en este caso |x2 − 4x+ 3| = − (x2 − 4x+ 3) , por tanto la ecuación dadase puede escribir como:
−(x2 − 4x+ 3
)= 3,
esto es,x2 − 4x+ 6 = 0.
La última ecuación encontrada no tiene raíces, por tanto, en este caso la solución es ∅.
(b) x2 − 4x+ 3 ≥ 0, en este caso |x2 − 4x+ 3| = x2 − 4x+ 3, por tanto la ecuación dada sepuede escribir como
x2 − 4x+ 3 = 3,esto es,
x2 − 4x = 0.La última ecuación encontrada tiene por solución al conjunto {0, 4}. Los elementos deeste conjunto satisfacen la ecuación dada, por tanto la solución al problema es ∅∪{0, 4} ={0, 4} .
Ejercicios propuestos
1. Demostrar los teroremas que no presentan demostración.
2. Resolver: |x2 − x− 2| = 2,Sol. : x =
1
2+1
2
√17, x =
1
2− 12
√17, x = 0, x = 1.
3. Resolver: |x+ 1|+ 2x− 5 = x,Sol. : x = 2.
4. Resolver:2 + |4x− 2|
3x= 1,
Sol. : ∅
20 CAPÍTULO 1. LOS NÚMEROS REALES (EN PRUEBA)
5. Resolver: |x2 + 4x− 22| = 1,Sol. : x = −2 + 3
√3, x = −2− 3
√3, x = 3, x = −7.
6. Resolver:|x2 + 4x− 10|
2x= 1,
Sol.: x =√19− 3, x =
√11− 1.
7. Resolver: |x+ 1|+ |x+ 2|+ |x+ 3| = 6,Sol : x = 0, x = −4.
8. Resolver: |x2 − 1|+ |x2 − 4| = 5,Sol.: x = ±
√5, x = 0.
9. Resolver: |x2 − 1|+ |x2 − 2| = 3,Sol.: x = ±
√3, x = 0.
10. Resolver: |x3|+ x− 10 = 0,Sol. : x = 2.
11. Si |a|+ |b|+ |c| = 0, entonces a = b = c = 0
12. Demostrar: |ab| = |a| |b|
13. Demostrar: |an| = |a|n
14. Demostrar: ||a| − |b|| ≤ |a− b|
1.4 Resolución de desigualdades con una variable
Resolver una desigualdad es encontrar valores que satisfacen la desigualdad dada, estoes, al reemplazar dichos valores en lugar de la variable se obtiene una afirmación verdadera.En esta sección, via ejercicios, se darán algunas técnicas para resolver desigualdades.
Definición 1.39 (puntos clave) Dada una expresión φ (x), denominaremos los puntos clavede φ en un intervalo (L,U) a L, U y aquellos puntos que cumplen una de las siguientescondiciones.
1. las x de (L,U) tal que φ (x) no está definida.
2. Las raíces de φ, esto es, los puntos r en donde φ (r) = 0.
Observación. Si no se dice nada acerca del intervaloen donde se encuentra definida φ se asume L = −∞, U =∞.
Dos puntos clave a, b serán llamados sucesivos si entre a y b no existe otro punto clave.
1.4. RESOLUCIÓN DE DESIGUALDADES CON UNA VARIABLE 21
Teorema 1.40 Sea φ (x) una expresión algebraica en la variable x. Sea (a, b) un intervaloformado con dos puntos clave sucesivos de φ. Entonces φ (x) es estrictamente positiva onegativa en todo el intervalo (a, b) .
Ejemplo 1.2 Consideremos φ (x) = 2x + 4. Los puntos clave son −∞,−2,∞. Por tantopodemos formar los siguientes intervalos: (−∞,−2) y (−2,∞). Por el teorema precedente φserá positiva o negativa en cada uno de los intervalos, así es suficiente averiguar el signo enalgún punto de cada uno de los intervalos.
1. Intervalo (−∞,−2) . Tomemos el punto −10 ∈ (−∞,−2) , en este punto
φ (−10) = 2 (−10) + 4 = −16 < 0,
por tanto en (−∞,−2) se tiene: 2x+ 4 < 0.
2. Intervalo (−2,∞) . Tomemos el punto 0 ∈ (−2,∞) , en este punto
φ (0) = 2 (0) + 4 = 4 > 0,
por tanto en (−2,∞) se tiene: 2x+ 4 > 0.
Presentamos a continuación el resumen del análisis anterior
∞− ∞-2
- - - - - - - - - - - - - - + + + + + + + + + +
+42
deSignos
x
Observación. Los puntos que se toman son arbitrarios, solo hay que cuidar que seencuentren dentro del intervalo que se está analizando.
Ejemplo 1.3 Consideremos φ (x) =x
x2 − 9 . Los puntos clave son
−∞,−3, 0, 3,∞.
Por tanto se tienen los siguientes intervalos a analizar:
1. Intervalo (−∞,−3) . Con x = −10 : φ (−10) = −10100− 9 < 0.
2. Intervalo (−3, 0) . Con x = −2 : φ (−2) = −24− 9 > 0.
3. Intervalo (0, 3) . Con x = 2 : φ (2) =2
4− 9 < 0.
4. Intervalo (3,∞) . Con x = 10 : φ (10) =10
100− 9 > 0.
22 CAPÍTULO 1. LOS NÚMEROS REALES (EN PRUEBA)
En el siguiente cuadro presentamos el resumen del análisis anterior.
∞− ∞+ + + + + - - - - - - - - - - + + + +
3− 30
−9
deSignos
2x
x- - - - - - - -
Observación. Debemos observar que los signos van intercalados, esto en general no escierto, como se muestra en el siguiente ejemplo.
Ejemplo 1.4 Sea φ (x) = (x− 5)2 (x+ 3) . Los puntos clave son
−∞,−3, 5,∞.
Por tanto los intervalos a analizar son:
1. Intervalo (−∞,−3) : Tomamos x = −10 y entonces φ (−10) = −1575 < 0
2. Intervalo (−3, 5) : Tomamos x = 0 y entonces φ (0) = 25 > 0.
3. Intervalo (5,∞) : Tomamos x = 10 y entonces φ (10) = 325 > 0.
Así tenemos:
∞− ∞+ + + + + + +
3− 5 ( ) ( )
+− 35
deSignos2xx
- - - - - - - - + + + + + + +
Ejemplo 1.5 Consideremos ahora el siguiente problema: Resolver
x2 − 5x− 1 > 0.
Sea φ (x) =x2 − 5x− 1 , los puntos clave son
−∞,−√5, 1,
√5,∞
Así tenemos 4 casos:
1. Intervalo(−∞,−
√5): Con x = −10, φ (−10) = 100−5
−10−1 < 0.
2. Intervalo(−√5, 1): Con x = 0, φ (0) = 5 > 0.
3. Intervalo(1,√5): Con x = 2, φ (2) = 4−5
2−1 < 0.
4. Intervalo(√5,∞
): Con x = 10, φ (10) = 100−5
10−1 > 0.
1.4. RESOLUCIÓN DE DESIGUALDADES CON UNA VARIABLE 23
Presentamos a continuación un resumen:
∞− ∞+ + + + + + + + - - - - - - - + + + + +
5− 51
−−1
5
deSignos2
x
x- - - - - - - -
Por tanto la solución al problema dado es el conjunto de puntos en donde φ es mayor a cero,esto es: (
−√5, 1)∪(√5,∞
).
Ejercicios resueltos
Ejercicio 1.3 Resolver 2x2 + x− 6 ≥ 0
Solución. Factorizando
2x2 + x− 6 = (x+ 2) (2x− 3) ,
así los puntos clave de φ (x) = 2x2 + x− 6 son
−∞, −2, 3/2, ∞
1. Intervalo (−∞.− 2) : Con x = −10 se tiene φ (−10) = (−10 + 2) (−20− 3) > 0.
2. Intervalo (−2, 3/2) : Con x = 0 se tiene φ (0) = (2) (−3) < 0.
3. Intervalo (3/2,∞) : Con x = 10 se tiene φ (10) = (10 + 2) (20− 3) > 0.
∞− ∞-2
+ + + + + + - - - - - - - - - - - - - + + + + + +
23
−+ 62
deSignos2 xx
Por otra parte los números −2 y 32son soluciones del problema, por tanto la solución del
Por lo anterior y tomando en cuenta que la desigualdad es del tipo ≥ la solución es:
(−∞, 0) ∪ [1/2, 1) ∪ [2,∞) .
Ejercicios propuestos
Resolver:
1. 2x3 − 7x2 − 5x+ 4 > 0. Sol.:(−1, 1
2
)∪ (4,∞) .
2. (4x− 15)3 (x− 1) < 0. Sol.:(1,15
4
).
3. 9x4 − 36x3 + 47x2 − 24x ≥ −4, Sol. :(−∞, 1
3
]∪[2
3, 1
]∪ [2,∞) .
4.x
x2 + 1+1
2x− x ≥ 0, Sol.: (−∞,−1] ∪ (0, 1]
5.1
x− x
x− 2 ≤ 0, Sol. : (−∞, 0) ∪ (2,∞)
6.x
x2 + 1+1
2x≥ 1, Sol. : (0, 1]
7. x4 − 9 ≥ 7., Sol.: (−∞,−2] ∪ [2,∞)
8.x2 + x− 9
x> 1. Sol.: (−3, 0) ∪ (3,∞) .
9. (x− 1) (x− 2)(1− 1
x
)> 0. Sol.: (−∞, 0) ∪ (2,∞) .
26 CAPÍTULO 1. LOS NÚMEROS REALES (EN PRUEBA)
10.1
x− 2 +2x
x− 1 − 1 ≥ 0. Sol.:(−∞,−
√3]∪ (2,∞) ∪
(1,√3].
11. x6 + 4x2 − 5 ≤ 0. Sol.: [−1, 1] .
12.1
x+2
x2> 3. Sol.:
(−23, 0
)∪ (0, 1) .
13.1
x4+1
x3+1
x2> 0. Sol.: x �= 0.
14. x2 − 3x2
x− 1 < 0. Sol.: (1, 4) .
15.(x2 − 1) (x2 − 4)
x2 − 9 ≤ 0. Sol.: (−3, 2] ∪ [−1, 1] ∪ [2, 3) .
16.1
x+
1
x− 2 < 0. Sol.: (−∞, 0) ∪ (1, 2)
17.1
x+
1
x− 2 +1
x− 4 < 0. Sol.: (−∞, 0) ∪(2− 2
√33, 2)∪(2 + 2
√33, 4).
18. Resolver la desigualdad ax2 + bx+ c ≤ 0 donde a > 0. Considere los siguientes casos:
(a) ax2 + bx+ c = a (x− r1) (x− r2) donde r1, r2 ∈ R y r1 < r2.
(b) ax2 + bx+ c = a (x− r1) (x− r2) donde r1, r2 ∈ R y r1 = r2.
(c) b2 − 4ac < 0.
19. Resolver:1
x− 1
x2< a, donde a es un número real no nulo.
1.5 Desigualdades con valor absoluto
Cuando se presentan desigualdades en donde se presentan expresiones con valor absoluto. Lospuntos se encuentran convirtiendo la desigualdad en otra donde no figuren valores absolutos.
Ejemplo 1.6 Eliminaremos el valor absoluto en la expresión |x− 5|+2. Usando la definiciónde valor absoluto obtenemos:
|x− 5|+ 2 ={− (x− 5) + 2 si x ∈ (−∞, 5)x− 5 + 2 si x ∈ [5,∞) ,
esto es,
|x− 5|+ 2 ={−x+ 7 si x ∈ (−∞, 5)x− 3 si x ∈ [5,∞)
observemos que al eliminar el valor absoluto la expresión dada se convierte en dos expresioneslibres de valor absoluto.
1.5. DESIGUALDADES CON VALOR ABSOLUTO 27
Ejemplo 1.7
|3x+ 11| |x| |x− 8| =
− (3x+ 11) (−x) [− (x− 8)] x ∈(−∞,−11
3
)
(3x+ 11) (−x) [− (x− 8)] x ∈[−113, 0
)
(3x+ 11) (x) [− (x− 8)] x ∈ [0, 8)(3x+ 11) (x) (x− 8) x ∈ [8,∞)
,
simplificando se tiene:
|3x+ 11| |x| |x− 8| =
−x (3x+ 11) (x− 8) x ∈(−∞,−11
3
)
x (3x+ 11) (x− 8) x ∈[−113, 0
)
−x (3x+ 11) (x− 8) x ∈ [0, 8)x (3x+ 11) (x− 8) x ∈ [8,∞)
o más compactamente:
|3x+ 11| |x| |x− 8| =
−x (3x+ 11) (x− 8) x ∈(−∞,−11
3
)∪ [0, 8)
x (3x+ 11) (x− 8) x ∈[−113, 0
)∪ [8,∞)
Ejercicios resueltos
Ejercicio 1.6 Resolver |x+ 2|+ |x− 2|+ x− 5 ≥ 0Solución. Usando la definición de valor absoluto, la expresión situada a la izquierda de ladesigualdad se puede escribir como:
realizando operaciones algebraicas, lo anterior queda:
|x+ 2|+ |x− 2|+ x− 5 =
−x− 5 x ∈ (−∞,−2)x− 1 x ∈ [−2, 2)3x− 5 x ∈ [2,∞)
,
encontramos ahora las soluciones en los intervalos (−∞,−2), [−2, 2), [2,∞). Luego de estola solución final será la unión de las soluciones encontradas en cada uno de los intervalosmensionados.
(a) Caso x ∈ (−∞,−2) . En este caso con φ1 (x) = −x− 5 los puntos clave de φ1 son
−∞,−5,−2.Procedemos a analizar los intervalos:
28 CAPÍTULO 1. LOS NÚMEROS REALES (EN PRUEBA)
1. Intervalo (−∞,−5) : Con x = −10, φ1 (−10) = 10− 5 > 0.2. Intervalo (−5,−2) : Con x = −3, φ1 (−3) = − (−3)− 5 < 0.
Observando además que φ1 (−5) = 0, la solución es
(−∞,−5] .
(b) Caso x ∈ [−2, 2) . En este caso con φ2 (x) = x− 1 los puntos clave son
−2, 1, 2
1. Intervalo (−2, 1) : Con x = 0, φ2 (0) = 0− 1 < 0.2. Intervalo (1, 2) : Con x = 1.5, φ2 (1.5) = 1.5− 1 > 0
Tomando en cuenta que φ2 (1) = 0, la solución es
[1, 2) .
(c) Caso x ∈ [2,∞) . En este caso con φ3 (x) = 3x− 5 los puntos clave son:
2,∞
(observemos que 5/3 no es un punto clave ¿Porque?), así se tiene que analizar un solointervalo:
Intervalo (2,∞) : Con x = 4, φ3 (4) = 12− 5 > 0.Además observamos que φ3 (2) = 1 > 0, por tanto la solución es
[2,∞) .
De lo anterior concluimos que la solución es:
(−∞,−5] ∪ [1, 2) ∪ [2,∞) = (−∞,−5] ∪ [1,∞) .
Gráfico de |x+ 2|+ |x− 2|+ x− 5 es:
522 −+−++ xxx
y
5− 2 x
6
13−
1.5. DESIGUALDADES CON VALOR ABSOLUTO 29
Ejercicio 1.7 Resolver |x+ 2| − |x− 2|+ x2 ≤ 0.
Solución. Nuevamente la expresión de la izquierda de la desigualdad se puede escribirde la siguiente manera
|x+ 2| − |x− 2|+ x2 =
x2 − 4 x ∈ (−∞,−2)x2 + 2x x ∈ [−2, 2)x2 + 4 x ∈ [2,∞)
(a) x ∈ (−∞,−2) . En este caso con φ1 = x2 − 4, los puntos clave son −∞,−2. En el únicointervalo a analizar con x = −10 encontramos φ1 (−10) = 100 − 4 > 0, por tanto, eneste caso la solución es
∅.
(b) x ∈ [−2, 2) . Con φ2 (x) = x2 + 2x, los puntos clave son −2, 0, 2.
1. Intervalo (−2, 0) : Con x = −1, φ2 (−1) = 1− 2 < 0.2. Intervalo (0, 2) : Con x = 1, φ2 (1) = 1 + 2 > 0.
Tomando en cuenta que x = −2 y x = 0 son soluciones del problema, la soluciónes
[−2, 0]
(c) x ∈ [2,∞) . En este caso claramente x2 + 4 > 0 para todo x ∈ [2,∞) , así en este caso lasolución es
∅.
De lo anterior concluimos que la solución es
∅ ∪ [−2, 0] ∪ ∅ = [−2, 0]
El gráfico de |x+ 2| − |x− 2|+ x2 es:
2− 2
222 xxx +−−+
y
x
8
30 CAPÍTULO 1. LOS NÚMEROS REALES (EN PRUEBA)
Ejercicio 1.8 Resolver|x+ 2| − |x− 2|+ x2
x− 5 ≤ 0.
Solución. Resolviendo como en el anterior caso encontramos que la solución es el con-
x2 − 2x− 3 si x ∈ (−∞,−1] ∪ [3,∞)− (x2 − 2x− 3) (−1, 3)
luego
∣∣x2 − 2x− 3∣∣− x2 =
{x2 − 2x− 3− x2 si x ∈ (−∞,−1) ∪ [3,∞)− (x2 − 2x− 3)− x2 si x ∈ [−1, 3)
realizando operaciones algebraicas lo anterior queda como
∣∣x2 − 2x− 3∣∣− x2 =
{−2x− 3 si x ∈ (−∞,−1) ∪ [3,∞)−2x2 + 2x+ 3 si x ∈ [−1, 3)
(a) x ∈ (−∞,−1] ∪ [3,∞) . Sea φ1 (x) = −2x− 3, los puntos clave son
−∞,−3/2,−1, 3,∞
1. Intervalo (−∞,−3/2) : Con x = −2, φ1 (−2) = 4− 3 > 0.2. Intervalo (−3/2,−1) : Con x = −1.2, φ1 (−1.2) = 2.4− 3 < 0.3. Intervalo (3,∞) : Con x = 5 : φ1 (5) = −10− 3 < 0.
1.5. DESIGUALDADES CON VALOR ABSOLUTO 31
Así la solución es:(−∞,−3/2] .
(notemos que −3/2 es solución del problema)
(b) x ∈ [−1, 3) . Sea φ2 (x) = −2x2 + 2x+ 3 = 0, los puntos clave son
−1, 1−√7
2,1 +
√7
2, 3
1. Intervalo(−1, 1−
√7
2
): Con x = −0.9, φ2 (−0.9) = −0.42 < 0.
2. Intervalo(1−√7
2, 1+
√7
2
): Con x = 0, φ2 (0) = 3 > 0.
3. Intervalo(1+√7
2, 3): Con x = 2, φ2 (2) = −8 + 4 + 3 < 0.
Así la solución en este caso es:[1−
√7
2,1 +
√7
2
]
.
(nuevamente debe notar que los extremos del anterior intervalo son soluciones delproblema)
De (a) y (b) la solución es(−∞,−3
2
]∪[1−
√7
2,1 +
√7
2
]
Ejercicio 1.10 Resolver:|x− 14|x2 − 4 + 5 ≥ 0.
Solución. Usando la definición de valor absoluto encontramos
|x− 14|x2 − 4 + 5 =
−x+ 14x2 − 4 + 5 si x ∈ (−∞, 14)
x− 14x2 − 4 + 5 si x ∈ [14,∞)
(a) x ∈ (−∞, 14) . En este caso la desigualdad queda como:
−x+ 14x2 − 4 + 5 =
(5x− 6) (x+ 1)x2 − 4 ≥ 0,
con φ1 (x) =(5x− 6) (x+ 1)
x2 − 4 , los puntos clave son:
−∞,−2,−1, 65, 2, 14
Con estos puntos analizamos los siguientes intervalos:
32 CAPÍTULO 1. LOS NÚMEROS REALES (EN PRUEBA)
1. (−∞,−2) : Con x = −3, φ1 (−3) =(−15− 6) (−3 + 1)
9− 4 > 0.
2. (−2,−1) : Con x = −1.5, φ1 (−1.5) =(−7.5− 6) (−1.5 + 1)
(1.52 − 4) < 0.
3.(−1, 6
5
): Con x = 0, φ1 (0) =
(−6) (1)−4 > 0
4.(65, 2): Con x = 1.5, φ1 (1.5) =
(7.5− 6) (1.5 + 1)1.52 − 4 < 0
5. (2, 14) : Con x = 10, φ1 (10) =(50− 6) (10 + 1)
100− 4 > 0
observemos además que 65es solución del problema, así la solución en este caso es:
(−∞,−2) ∪(−1, 6
5
]∪ (2, 14)
(b) x ∈ [14,∞) . En este caso la desigualdad queda como:
x− 14x2 − 4 + 5 =
5x2 + x− 34x2 − 4 ≥ 0
Las raíces de φ2 (x) =5x2 + x− 34(x− 2) (x+ 2) son −2.709.. y 2.5095 que caen fuera del intervalo
en donde se está trabajando por tanto los únicos puntos clave son 14, ∞. En el únicointervalo a analizar tomamos x = 20 y entonces φ2 (20) > 0, por otra parte x = 14 essolución del problema, por tanto la solución en este caso es
[14,∞) .
De (a) y (b) concluimos que la solución es:
(−∞,−2) ∪[−1, 6
5
]∪ (2, 14) ∪ [14,∞) ,
esto es,
(−∞,−2)∪[−1, 6
5
]∪ (2,∞) .
1.5. DESIGUALDADES CON VALOR ABSOLUTO 33
Ejercicios propuestos
Resolver las siguientes desigualdades.
1.
∣∣∣∣1
x+ 1
∣∣∣∣ < 1,
Sol.: (−∞,−2) ∪ (0,∞).
2.x |x− 3| − |x+ 3||x2 − 4| − 4 > 0 en el intervalo [0,∞)
Sol.:(0,√8)∪[2 +
√7,∞
)
3.|2x+ 3| − x |x|
|x− 1| > 0
Sol.: (−∞, 1) ∪ (1, 3)
4.|x− 5|x− 2 + x− 5 ≥ 0,
Sol.: (2, 3] ∪ [5,∞) .
5. |x+ 1|+ x |x− 5| − 2 ≤ 0.Sol.:
(−∞, 3− 2
√2].
6. |2x− 1|+ |4x− 5| − 8 ≥ 0.
Sol.:(−∞,−1
3
]∪[7
3,∞).
7.3 + |2x+ 5|+ x
x≥ 3,
Sol. : (0,∞).
8. −6 + |3x− 1|x− 2x > 0,Sol. : (2,∞).
9. |2x+ 1|+ 3x− |5x− 3| > 3,
Sol. :(1
2,∞).
10. |2x+ 1| − 3x− |5x− 3| < 0,
Sol. :(−∞, 1
2
)∪(2
3,∞).
11. |x2 − 4|+ 3x ≤ 5,
Sol.:
(−3− 3
√5
2,3−
√5
2
)
.
34 CAPÍTULO 1. LOS NÚMEROS REALES (EN PRUEBA)
12. |x2 − 9| − 2 |x|+ x < 10,
Sol.:
(−3−
√85
2,1 +
√77
2
)
13.|x (x+ 3)||x+ 1| ≥ 2,
Sol.:
(
−∞, −5−√17
2
]
∪ [−2,−1) ∪(
−1, −5 +√17
2
]
∪ [1,∞)
14.|2x| − 5 |x+ 2|+ x2 − x
|x|+ x > x,
Sol.: ∅
15.|x− 2| − |x+ 2|
x< 0,
Sol. : (−∞, 0) ∪ (0,∞)
16. |x|+ |x+ 1| ≤ 2,
Sol.:[−32,1
2
]
17. |x|+ |x+ 1|+ |x+ 2| ≤ 4,
Sol. :[−73,1
3
].
18. |x|+ |x+ 1|+ |x+ 2|+ |x+ 3| ≤ 7,
Sol. :[−134,1
4
]
19.∑n
k=0 |x+ k| ≤n (n+ 1)
2+ 1, n ∈ N.
Sol.: (Conjetura: ¿Es la solución el intervalo[−n (n+ 1) + 1
n+ 1,1
n+ 1
]?
20. |x|7 + |x5 − 1| ≥ 0,Sol. : R
21. |x|+ |x− 1|+ x < 0,Sol. : ∅
22. |x| − |x− 1|+ x ≥ 0,
Sol. :[1
3,∞)
1.5. DESIGUALDADES CON VALOR ABSOLUTO 35
23.1
|x| − x2 ≥ 0,
Sol. : [−1, 0) ∪ (0, 1]
24.1
|x| − |x|+ 1 ≤ 0,
Sol. :
(
−∞, −1−√5
2
]
∪[1 +
√5
2,∞)
25.
∣∣∣∣x−1
2
∣∣∣∣+ 2x > 2,
Sol. :(56,∞)
26. x2 + |x2 − 4x+ 3|+ |x| − 3 ≤ 0,
:Sol.:[0,6
5
]
27. 2x |x| − |x2 − 1| − 3x+ 1 ≥ 0,
Sol.:[−12− 16
√33, 0
]∪ {1} ∪ [2,∞)
28.|x|
|x2 + 1| +1
2 |x| − 1 ≥ 0,
Sol.: [−1, 0) ∪ (0, 1]
29.1
|x+ 1| −1
|x| +1
|x− 1| ≥ 0,
Sol.:(−∞,−1) ∪(−1, 1−
√2]∪[−1 +
√2, 1)∪ (1,∞)
30.x+ x− 22 + |x− 3| < 3,
Sol.: R
31.1
|x+ 1| +1
x≥ 2,
Sol. :(−12− 12
√3,−1
)∪(−1,−1
2
√2
]∪(0,1
2
√2
]
32. |x7 + 33x2 + 27|+ |x|+ x6 < 0,Sol. : ∅.
33.|2x− 1|+ 2x− 1|x+ 1|+ x+ 1 > 0
Sol.:[1
2,∞)
36 CAPÍTULO 1. LOS NÚMEROS REALES (EN PRUEBA)
Capítulo 2
Funciones
2.1 Introducción
El concepto de función fué introducida en matemáticas por Leibniz. En esta sección se daráuna descripción intuitiva del concepto de Función.
Sean X,Y conjuntos. Una función es una correspondencia de los elementos de X con loselementos de Y tal que a cada x ∈ X le corresponde uno y solamente un elemento de Y.
Ejemplo 2.1 Sea X un conjunto de personas, Y = Z, (recuerde Z es el conjunto de enteros).Consideremos la siguiente correspondencia entre estos dos conjuntos: A cada persona de Xle corresponde su edad. Claramente esta correspondencia es una función.
Ejemplo 2.2 Sea X = N, Y un conjunto de familias de cierta comunidad. Consideremosla siguiente correspondencia: A cada número de n ∈ N le corresponde una familia de Y conexactamente n miembros. Esta correspondencia en general no es una función pues puedenexistir familias con el mismo número de miembros.
Ejercicio 2.1 Si X es el conjunto de todas las familias y Y = N ¿es función la siguientecorrespondencia?: A cada familia le corresponde el número de miembros de la familia.
Notación Para denotar una función usaremos letras como f, g u otra letra. Si x ∈ X y a xle corresponde y ∈ Y , y la letra usada es f escribiremos
f(x) = y ó xf→ y
37
38 CAPÍTULO 2. FUNCIONES
y diremos que la ”imagen” de x por la función f es f(x).
�
�
�
�
�
�
�
�
X Y
�� �
�f
x f(x)
Para decir que f es una función de X en Y escribiremos f : X → Y , el conjunto X sellamará dominio de f y se denotará con Df , el conjunto Y se llamará codominio de f y sedenotará con Cf . Los valores de y ∈ Y tales que son imagenes de algún x ∈ X forman elconjunto que se llamará rango de f y se denotará con Rf , es claro que Rf ⊂ Cf . Gráficamente:
�
�
�
�
�
�
�
�
DominioRango
Observemos que ningún elemento del dominio de una función puede carecer de imagen.Finalmente observemos que una función1 f : X → Y consta de tres partes:
1Formalmente una función se define de la siguiente manera:Sean X,Y conjuntos. Una función f de X en Y denotado por f : X → Y es el conjunto de pares ordenados
f = {(x, f (x)) : x ∈ Df}
tales que:
• Para todo x ∈ X, existe un y ∈ Y tal que f (x) = y
• Para cualesquiera x0, x1 ∈ X, si x0 = x1 entonces f (x0) = f (x1) .
Observemos que f ⊂ X × Y , además claramente: (x, y) ∈ f significa y = f(x).
2.1. INTRODUCCIÓN 39
1. El conjunto X llamado dominio,
2. el conjunto Y llamado codominio y
3. una regla que permita asociar, de modo bien determinado (único) un elemento x ∈ Xcon un elemento y = f(x) ∈ Y .
Ejemplo 2.3 Sea P el conjunto de todos los polígonos del plano, R el conjunto de númerosreales y f : P → R una función que asocia a cada polígono x en P su área f(x).
Ejemplo 2.4 Sea R+el conjunto de los reales positivos, C el conjunto de cuadrados en elplano. f : R+ → C es la correspondencia que a cada x ∈ R+ le hace corresponder uncuadrado en C tal que su área sea x. Es claro que f no puede ser función pues por ejemplopara x = 1 se tienen varios cuadrados como imagen como se muestra a continuación.
�
�1
�
�R2
R+
1
2
3
1
�f
������
�������
�������������
Del gráfico f(1) es el cuadrado con vértices (0,0), (1,0), (1,1), (0,1), pero también f(1) puedeser el cuadrado con vertices (0,2), (1,2), (1,3), (0,3) pues ambos cuadrados tienen área iguala 1.
Ejemplo 2.5 Sean X = Y = R, considérese la función que asigna a cada elemento x de X elelemento x2 de Y , entonces tenemos f(x) = x2 para cada x ∈ R. El gráfico en coordenadas
40 CAPÍTULO 2. FUNCIONES
cartesianas es:
-1.5 -1 -0.5 0 0.5 1 1.5
0.6
1
1.6
2
x
y
( ) 2xxf =
Ejercicio 2.2 Dar un ejemplo de una correspondencia de conjuntos que no sea función.Solución. Sea A = {a, b, c}, B = {u, v}. Consideremos la correspondencia
a �−→ ub �−→ vc �−→ uc �−→ v
No puede ser función pues f(c) = u y f(c) = v, asi el elemento c tendría dos imagenes, lo queno está de acuerdo con la definición de función.
Ejercicio 2.3 Sea X = {a, b, c, d, }, Y = {u, v,w}, ¿es función la siguiente correspondencia?
�
�
�
�
�
�
�
�
X Ya� � u
b� � v
c� � w
d�
Solución: No puede ser función pues d ∈ X no tiene imagen en Y . Si asignamos f(d) = w
2.1. INTRODUCCIÓN 41
obtenemos:
�
�
�
�
�
�
�
�
X Ya� � u
b� � v
c� � w
d������������
que es una función. Intuitivamente observemos que del codominio X no pueden salir ”dosflechas” de un mismo elemento, sin embargo a un elemento de Y pueden llegarle ”más de unaflecha ” sin perder la condición de función.
Ejercicio 2.4 Sea f la correspondencia de números reales definida por f(x) =√4− x2, en-
contrar Df , Cf y Rf y bosquejar el gráfico de f .
Solución.Cálculo del dominio. Es claro que toda la recta real R no puede ser el dominio de f
pues por ejemplo x = 5 no tiene imagen, ya que f(5) =√4− 25 =
√−21, luego f(5) no
puede existir. Para encontrar el Df encontramos los valores de x tales que√4− x2 exista,
esto ocurre cuando
4− x2 ≥ 0,
es decir cuando −2 ≤ x ≤ 2, luego Df = [−2, 2].El codominio. El codominio de f es el conjunto Cf = R.Cálculo del rango. El rango está formado por los puntos y ∈ Cf tales que existe x ∈ Df
y f(x) = y. Puesto que f(x) =√4− x2 tenemos y =
√4− x2 para x ∈ [−2, 2]. De la
igualdad y =√4− x2 despejamos la variable x obteniendo x =
√4− y2 que existe solamente
si y ∈ [−2, 2] como por la definición de esta función y ≥ 0, el rango de f es Rf = [0, 2].Bosquejamos ahora la gráfica. La gráfica se bosqueja encontrando, como es usual, la imagende algunos puntos, mientras mas puntos se tome se tendrá un mejor bosquejo de la gráfica.Para el ejemplo tomamos los siguientes puntos mostrados en forma tabular.
42 CAPÍTULO 2. FUNCIONES
x f (x)−2 0.0000−1.8 0.8718−1.6 1.2000−1.4 1.4283−1.2 1.6000−1.0 1.7321−0.8 1.8330−0.6 1.9079−0.4 1.9596−0.2 1.99000.0 2.0000
x f (x)2 0.00001.8 0.87181.6 1.20001.4 1.42831.2 1.60001.0 1.73210.8 1.83300.6 1.90790.4 1.95960.2 1.99000.0 2.0000
-2 -10
1 2
1
2
x
( ) 24 xxf −=y
Ejercicio 2.5 Sea f(x) =1
x, encontrar Df , Cf y Rf y bosquejar la gráfica.
Solución. f(x) =1
xestá definida para todo número real exepto para x = 0, luego Df =
R− {0}. El codominio es Cf = R. El rango Rf es R− {0} pues el 0 es el único elemento deCf que no tiene una preimagen, esto es, no existe x ∈ Df tal que f(x) = 0. La gráfica es:
�
�X
Y
2.1. INTRODUCCIÓN 43
Ejercicio 2.6 Hallar el dominio de f(x) =√3 + x+ 4
√7− x.
Solución. Puesto que la raíz n−enésima de números negativos cuando n es par no existeen el sistema de números reales, el dominio de f estará dado por los valores de x tales que3 + x ≥ 0 y 7− x ≥ 0.La solución para la primera desigualdad es [−3,∞) y para la segunda es (−∞, 7], por tantoel dominio de f es Df = (−∞, 7] ∩ [−3,∞) = [−3, 7].
Ejercicio 2.7 Hallar el dominio de la función f(x) =1
3√x− 1 , y bosquejar la gráfica.
Solución. El denominador existe para todo valor de x, pero se anula en x = 1, así Df =R− {1}.
Solución. Puesto que 3√−x existe para todo número real, analizamos
√x
x2 − 4 , esta raíz
cuadrada existe six
x2 − 4 ≥ 0, esto es cuando x ∈ (−2, 0] ∪ (2,∞), así el dominio es Df =
(−2, 0] ∪ (2,∞) .
44 CAPÍTULO 2. FUNCIONES
2.2 Funciones Especiales
2.2.1 Función Identidad
Sea X un conjunto. La función i : X → X definida por i(x) = x se llama función identidad.Para esta función Di = Ri. Si X = R, la gráfica es:
�
�X
Y
������������
2.2.2 Funcion Constante
Sea X un conjunto, Y = R, c ∈ R. La función definida por f(x) = c para todo x ∈ X seconoce como función constante, aquí Df = X, Cf = R, Rf = {c}. Si X = R su grafico es:
Sea f : R → R definida por f(x) = ax + b, con a, b ∈ R, se llama función lineal y para estafunción Df = Cf = Rf = R. La gráfica de f(x) = 3x+ 1, es:
�
�X
Y
-1
1
13
2.2.5 Función Potencia
La función f : R→ R definida por f(x) = xn, con n entero positivo, se llama función potencia.Para esta función Df = R, Cf = R, Rf = R
+si n es par y Rf = R si n es impar. Las gráficas
46 CAPÍTULO 2. FUNCIONES
para n par y n impar tienen la siguiente forma, respectivamente:
-2 -1 0 1 2
1
2
3
4
-2 -1 0 1 2
-5
-3
-1
1
3
5
2xy =
100xy =3xy =
101xy =
x
y
x
y
2.2.6 Función Polinomial
La función polinómica Pn : R→ R de grado n está definido por:
Pn(x) = cnxn + cn−1x
n−1 + ...+ c1x+ c0 =n∑
k=0
cn−kxn−k
Donde cn �= 0. Para la función polinómica DPn = CPn = R.Para obtener la forma de la gráfica de la función polinomial es útil la siguiente propiedad
de los polinomios, llamada: propiedad asintòtica.Propiedad asintótica.Para valores |x| muy grandes:
cnxn + cn−1x
n−1 + ... + c1x+ c0 � cnxn
Ejemplo 2.6 Si f (x) = x6 − 14x4 + 49x2 − 36 para valores grandes de x se tiene:
x x6 − 14x4 + 49x2 − 36 x6
10 864864 106
100 9. 98600× 1011 1012
1000 9. 99986× 1017 1018
10000 9. 99999× 1023 1024
100000 1. 0× 1030 1030
El comportamiento asintótico muestra que las gráficas de los polinomios de grado par,para valores x muy grandes, se parecen a la gráfica de la función potencia xn para n par,para x cerca de cero se comportará de acuerdo al número de raíces que tenga el polinomio.Un comportamiento análogo se tiene para polinomios de grado impar. A continuación semuestran gráficos para explicar este comportamiento.
Las funciones trigonométricas son sin x, cosx, tan x, cot x ,secx, cscx. Las gráficas de estasfunciones se muestran a continuación.
)sen(xy =
y
x
1−
1
π202π
23ππ
( )xy cos=
π22
3ππ2π0
1
1−
y
x
48 CAPÍTULO 2. FUNCIONES
-6
-4
-2
0
2
4
6
2π
23ππ π2
( )xy tan=
x
y
2π
23π π20 π x
5
5−
y
( )xy cot=
Otras funciones trigonométricas son las inversas de las anteriores como el arcoseno, arco-coseno, arcotangente, que se denotan respectivamente como arcsin x, arccosx, arctan x, etc.Estas funciones se estudian más adelante.
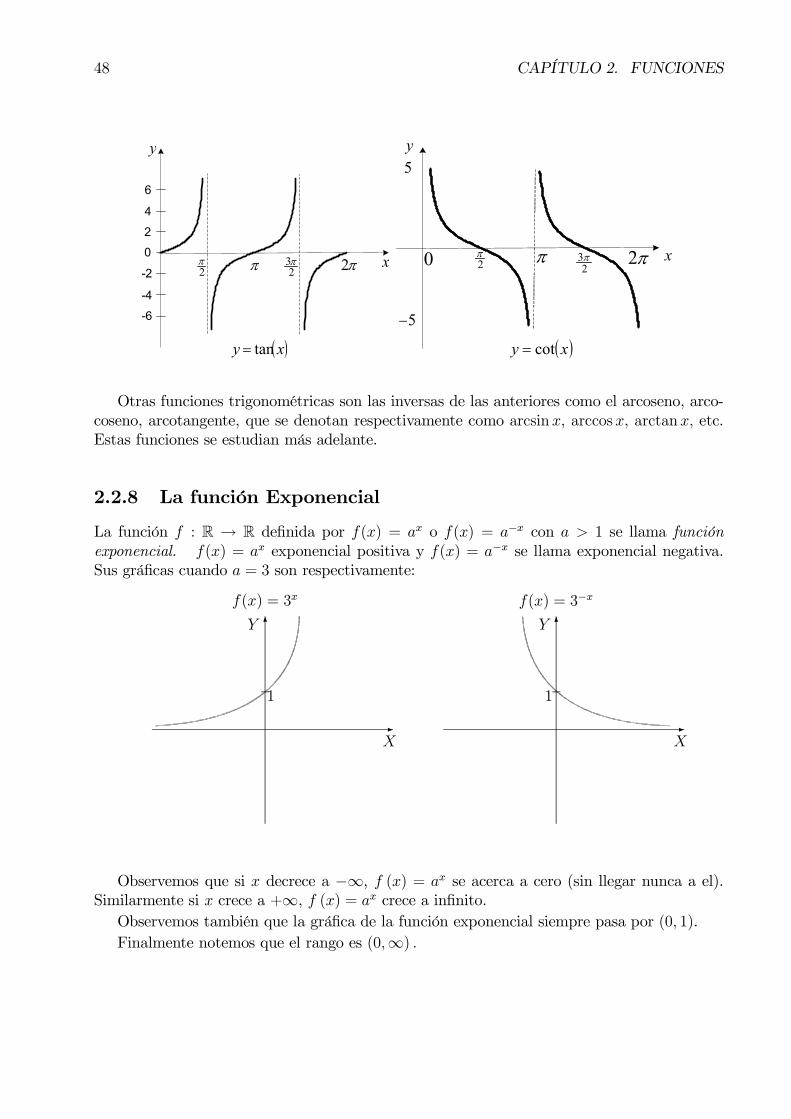
2.2.8 La función Exponencial
La función f : R → R definida por f(x) = ax o f(x) = a−x con a > 1 se llama funciónexponencial. f(x) = ax exponencial positiva y f(x) = a−x se llama exponencial negativa.Sus gráficas cuando a = 3 son respectivamente:
�
�X
Y
1
f(x) = 3x
�
�X
Y
1
f(x) = 3−x
Observemos que si x decrece a −∞, f (x) = ax se acerca a cero (sin llegar nunca a el).Similarmente si x crece a +∞, f (x) = ax crece a infinito.
Observemos también que la gráfica de la función exponencial siempre pasa por (0, 1).Finalmente notemos que el rango es (0,∞) .
2.2. FUNCIONES ESPECIALES 49
2.2.9 La función Logarítmica
La función f : R+ → R definida por f(x) = loga x se llama logaritmo de x en base a, aquísuponemos que a > 1. El logaritmo de x en base a es un número y tal que ay = x, esto es,las expresiones
y = loga x y ay = x
son equivalentes.El dominio de la función logaritmo es R+ y el codominio R. Algunas propiedades de la funciónlogaritmo son:
• a) loga a = 1
• b) loga 1 = 0
• c) loga(xz) = loga x+ loga z
• d) loga(x
z) = loga x− loga z
• e) loga(xz) = z · loga x
La gráfica de la función logaritmo tiene el siguiente aspecto:
�
�X
Y
1
f(x) = logax
Las bases más usadas son a = 10 y a = e � 2.718282. Si a = 10 se escribe log x en vez delog10 x y se conoce con el nombre de logaritmo decimal. Si a = e se escribe ln x en vez deloge x y se llama logaritmo neperiano o natural.
2.2.10 La función mayor entero
f : R → R definida por f(x) = [x] se conoce con el nombre de función mayor entero. [x] esel mayor entero menor o igual a x asi [2.3] = 2, [−4.37] = −5, [1] = 1, etc.
50 CAPÍTULO 2. FUNCIONES
Para esta función Df = R, Rf = Z.
�
�X
Y
f(x) = [x]
−2 −1 0 1 2
−2
−1
1
2
����
��
����
2.2.11 Funciones Hiperbólicas
Funciones hiperbólicas son el seno hiperbólico, coseno hiperbólico, tangente hiperbólico, etc.Se definen estas funciones como:
sinh x =ex − e−x2
coth x =1
tanhx=ex + e−x
ex − e−x , x �= 0
cosh x =ex + e−x
2sech x =
1
cosh x=
2
ex + e−x
tanh x =sinhx
cosh x=ex − e−xex + e−x
csch x =1
sinh x=
2
ex − e−x , x �= 0
A continuación se presenta un bosquejo del gráfico de las funciones coseno hiperbólico y senohiperbólico:
�
�X
Y
cosh(x)
1
�
�X
Y
senh(x)
2.3. OPERACIONES CON FUNCIONES 51
Ejercicios propuestos
1. Graficar f (x) = xn cuando n = 2, 3, 4, 5, 6, 7, 8.
2. Graficar las funciones cosx, tanx, secx, cscx, cotx.
3. Graficar f (x) = tanh x, cothx, sechx, cschx.
4. Graficar f (x) = 2x y 2−x.
5. Graficar f (x) = log 12
x. (El logaritmo de x en base 12)
2.3 Operaciones con funciones
En esta sección se definen las siguientes operaciones: suma, resta, producto, división y com-posición. Antes de empezar con este tema se define la igualdad de funciones.
Definición 2.1 Dos funciones f y g son iguales, lo que escribimos f = g si tienen un mismodominio D y f(x) = g(x) para todo x ∈ D.
2.3.1 Suma y Resta
Sean f y g funciones con dominios Df y Dg respectivamente, entonces f + g y f − g sonfunciones con dominio Df ∩Dg y reglas de correspondencia.
Ejemplo 2.7 Sean f, g : R → R definidas por f(x) = −x2 − x, g(x) = x2 − 2, entonces lafunción h = f + g está definida por h(x) = f (x) + g (x) = −x − 2, observemos además queel dominio de h es R .
2.3.2 Producto y División
Sean f y g funciones con dominios Df , y Dg respectivamente, entonces fg es una función condominio Df ∩Dg con la regla de correspondencia
(fg)(x) = f(x)g(x)
f
ges una función con dominio Df ∩ (Dg − {x : g(x) = 0}) y la regla de correspondencia
(f
g
)(x) =
f(x)
g(x)
52 CAPÍTULO 2. FUNCIONES
Ejemplo 2.8 Sean f, g : R→ R definidas por f(x) = x+ 2, g(x) = 2 (x− 1) ,entonces(fg) (x) = f (x) g (x) = 2(x+ 2)(x− 1).
Por otra parte (f
g
)(x) =
f (x)
g (x)=
x+ 2
2x− 2 .
Un caso particular muy importante es cuando f es una función constante, digamos f(x) =c, entonces (cf) (x) = cf (x). En particular si c = −1, se tiene (−f) (x) = −f (x).Ejemplo 2.9 Sea f(x) = x2 + x− 2, entonces (−f) (x) = −x2 − x+ 2.
2.3.3 Recíproco de una función
Consideremos ahora el problema siguiente : Dado f , encontrar g tal que fg = 1 (la función
constante 1). Por definición (fg) (x) = f (x) · g (x) ,esto sugiere definir g como g(x) =1
f(x),
claro esta para puntos x en donde f(x) �= 0. La función g se conoce como el recíproco de f .
Ejemplo 2.10 Si f(x) = x2 + x− 2, entonces el reciproco es g(x) =1
x2 + x− 2 .
2.3.4 Composición de Funciones
Definición 2.2 Sean g y f funciones, la composición de g con f , denotada por f ◦ g (se lee”g compuesta con f ”) es la función cuyo dominio es el conjunto
A = {x ∈ Dg : g(x) ∈ Df}cuya regla de correspondencia es (f ◦ g)(x) = f(g (x)).
El siguiente esquema ilustra la anterior definición.
�
�
�
�
�
�
�
�
�
�
�
�
X Y Z
�
g f
fog
x g(x) f(g(x))� �
2.3. OPERACIONES CON FUNCIONES 53
Aquí suponemos que g tiene dominio en X y rango en Y y f tiene dominio en Y y rangoen Z, entonces f ◦ g tiene dominio en X y rango en Z. El dominio de f ◦ g son los elementosde X cuya imagen g (x) está en Df .
Ejemplo 2.11 Consideremos las funciones:
�
�
�
�
�
�
�
�
g f
1
2
3
4
-20
1
358
0
1
5
8
6
8
10
12
14
ZWYX
�
�
�
�
�
�
�
�
Para este ejemplo A = {x ∈ Dg : g(x) ∈ Df} = {2, 3}, Luego tenemos
a) Graficar f y gb) Calcular f + g y f − gc) Calcular fgd) Calcular f ◦ g
2.3. OPERACIONES CON FUNCIONES 55
Solución. a)
�
�
�����
�
��
-5
-1
4
10
2 5
�
�
��
4
9
��
3
b) Observemos que Df = [0, 5] , Dg = [0, 6], luego Df+g = [0, 5]. Dividimos el intervalo [0, 5]en los intervalos [0, 2] , (2, 3) , [3, 5], luego:
(f + g)(x) =
x2 + 3x+ 4 si x ∈ [0, 2]x2 − x+ 1 si x ∈ (2, 3)−x+ 5 si x ∈ [3, 5]
(f − g)(x) =
−x2 + 3x+ 4 si x ∈ [0, 2]−x2 − x+ 1 si x ∈ (2, 3)−x− 3 si x ∈ [3, 5]
c)
(fg)(x) = f(x)g(x) =
(3x+ 4)x2 si x ∈ [0, 2](−x+ 1)x2 si x ∈ (2, 3)(−x+ 1)4 si x ∈ [3, 5]
d)
(f ◦ g)(x) =
f(x2) si x ∈[0,√2]
f(x2) si x ∈ (√2,√5)
f (4) si x ∈ [3, 5]=
3x2 + 4 si x ∈[0,√2]
−x2 + 1 si x ∈ (√2,√5)
−4 si x ∈ [3, 5]
Ejercicio 2.12 Calcular f ◦ g y g ◦ f si f : R→ R y g : R→ R son definidos por f(x) = x2
y g(x) = cosx.Solución.
(g ◦ f)(x) = g(f(x))= g(x2)= cosx2
(f ◦ g)(x) = f(g(x)= f(cosx)= (cosx)2
= cos2 x
56 CAPÍTULO 2. FUNCIONES
Las gráficas que a continuación se presentan, muestran que cosx2 �= cos2 x
�
�X
Y
cos(x2)
�
�X
Y
cos2x
Ejercicio 2.13 Sean f(x) = |x| , g(x) = sen x, calcular f ◦ g y g ◦ f .Solución.
(f ◦ g)(x) = f(g(x))= f(sen x)= |sen x|
y(g ◦ f)(x) = g(f(x))
= g(|x|)= sen |x|
2.4 La Inversa de una Función
En esta sección discutiremos el siguiente problema: Dada una función f encontrar una funcióng tal que f ◦ g = g ◦ f = I. Tal función se llamará inversa de f .
• ¿Siempre existe la función inversa?,
• ¿Cuales son las condiciones para la existencia de la función inversa?
• Finalizaremos esta sección presentando algunos teoremas sobre funciones inversas.
Previo a la discusión de la inversa de una función se dan las siguientes definiciones.
2.4.1 Funciones Inyectivas y Sobreyectivas
Definición 2.4 (Función Inyectiva). Sea f : X → Y . La función f se llama funcióninyectiva si para todo x0, x1 ∈ X con x0 �= x1 se tiene f(x0) �= f(x1).o equivalentemente f es inyectiva si f(x0) = f(x1) implica x0 = x1.
Obs. f no es inyectiva si dos elementos distintos tienen la misma imagen.
2.4. LA INVERSA DE UNA FUNCIÓN 57
Ejemplo 2.13 La función f : R → R definida por f(x) = x + 3 es inyectiva, en efecto sif(x0) = f(x1) tenemos x0 + 3 = x1 + 3 de donde x0 = x1, lo que muestra que f es inyectiva.
Ejemplo 2.14 La función g : R → R definida por f(x) = x2 no es inyectiva pues parax0 = −2 , x1 = 2 x0 �= x1 ∧ f(x0) = 4 = f(x1).
Las funciones inyectivas se conocen tambien como funciones uno a uno.Interpretación geométricaGeométricamente una función f es inyectiva si toda recta paralela al eje X corta a la
gráfica de f en un solo punto; como consecuencia de lo anterior una función no es inyectivasi existe una paralela al aje X que corta la gráfica de f en más de un punto.
�
�
Función no inyectiva
Definición 2.5 (Función Sobreyectiva) Una función f : X → Y es llamada sobreyectivasi todo y ∈ Y , es imagen de algún x ∈ X.
Observemos que una función f no es sobreyectiva si algún elemento de Y no tiene prei-magen.
Ejemplo 2.15 Sea f la función:
�
�
�
�
�
�
�
�
X Y1� � 1
2� � 3
3� � 5
4������������
2
6
�f
58 CAPÍTULO 2. FUNCIONES
f no es sobreyectiva, pues existen elementos de Y , como y = 2 ∈ Y , para los cuales no existeun x ∈ X tales que f(x) = 2.
Ejemplo 2.16 La función f : R→ R definida por f(x) = x3−1 es sobreyectiva. En efecto seay ∈ Y , y buscaremos x ∈ X tal que f(x) = y. De esta igualdad se tiene x3−1 = y, despejandox tenemos x = 3
√y + 1, este valor de x es el buscado pues f(x) =
(3√y + 1
)3 − 1 = y.
Observemos que si una función no es sobreyectiva, se puede construir un codominio ade-cuado de manera que la función sea sobreyectiva. Esto se logra eliminando los elementos queno tengan preimagen. Asi en el primer ejemplo podemos volver a definir la función comosigue:
�
�
�
�
�
�
�
�
X Y1� � 1
2� � 3
3� � 5
4������������
�f
Aqui claramente f es sobreyectiva, notemos que esta función no es 1-1, asi pues, ser sobre-yectiva no implica ser inyectiva, también, ser inyectiva no implica ser sobreyectiva.
Definición 2.6 (Imagen de un Conjunto) Sea f : X → Y una función y sea A ⊂ X. Laimagen de A por la función f , escrito f(A) es el conjunto
f(A) = {f(x) : x ∈ A} . = {y ∈ Y : f(x) = y, x ∈ A}si un elemento pertenece a la imagen de A escribimos
y ∈ f(A)⇔ (∃x, x ∈ A)(f(x) = y)
Algunas consecuencias de esta definición se enuncian en el siguiente teorema.
Teorema 2.7 Sea f : X → Y una función, y sean A,B subconjuntos de X, entonces:a) f(A ∪ B) = f(A) ∪ f(B)b) f(A ∩B) ⊂ f(A) ∩ f(B)c) A ⊂ B ⇒ f(A) ⊂ f(B)d) f(∅) = ∅
Teorema 2.8 Sea f : X → Y una función. f es sobreyectiva si y solamente si f(X) = Y .
Definición 2.9 Si f : X → Y es inyectiva y sobreyectiva f es biyectiva.
2.4. LA INVERSA DE UNA FUNCIÓN 59
2.4.2 Inversa de una función
Consideremos la función f : X → Y biyectiva, la función inversa de f , denotada por f−1 esla función de Y en X tal que:
f−1 ◦ f = IX f ◦ f−1 = IY
donde IX es la identidad en X e IY es la identidad en Y . Si y = f (x) entonces x = f−1 (y) .
Ejemplo 2.17 Consideremos la función f : R → R dada por f(x) = 2x − 1 entonces f esbiyectiva y la inversa es f−1(x) = 1
2(x+ 1), en efecto
(f ◦ f−1) (x) = f (f−1(x))= f
(12(x+ 1)
)
= 2(12(x+ 1)
)− 1 = x
y(f−1 ◦ f) (x) = f−1 (f(x))
= f−1 (2x− 1)= 1
2(2x− 1 + 1) = x
Ejemplo 2.18 La función:
�
�
�
�
�
�
�
�
X Y1
2
3
4
6
�f
�������������������
�
es sobreyectiva pero no inyectiva, luego no puede tener inversa, pues
�
�
�
�
�
�
�
�
Y X�f−1
4
6
�
������
����
�
12
3
No es función ya que 6 ∈ Y tiene dos imagenes, 2 y 3.
A continuación algunos teoremas sobre composición e inversa.
Teorema 2.10 Sean f y g funciones inyectivas, entonces f ◦ g es inyectiva.
60 CAPÍTULO 2. FUNCIONES
Demostración. Supongamos que
x0,x1 ∈ Dg y (f ◦ g)(x0) = (f ◦ g)(x1)
entoncesf(g(x0)) = f(g(x1))
Puesto que f es inyectiva g(x0) = g(x1), puesto que g es también es inyectivax0 = x1, luego f ◦ g es inyectiva.�
Teorema 2.11 Sean f y g funciones sobreyectivas,entonces f ◦ g es sobreyectiva.
Demostración. Sea z0 ∈ Rf , puesto que f es sobreyectiva existe y0 ∈ Df tal quef(y0) = z0. Por ser g sobreyectiva existe x0 ∈ Dgtal que g(x0) = y0. Claramente
(f ◦ g)(x0) = f(g(x0)) = f(y0) = z0.
Esto muestra que f ◦ g es sobreyectiva.
�
Teorema 2.12 Si f y g son invertibles (tienen inversa) entonces f ◦ g es invertible y
(f ◦ g)−1 = g−1 ◦ f−1.
Demostración. Por los teoremas anteriores f ◦ g es biyectiva, luego (f ◦ g)−1existe, luego
(f ◦ g) ◦ (f ◦ g)−1(x) = xpara todo x ∈ Rf , entonces
[f−1 ◦ (f ◦ g) ◦ (f ◦ g)−1
](x) = f−1(x)
pero f−1 ◦ f = I, por tanto
[g ◦ (f ◦ g)−1
](x) = f−1(x)
y aplicando la función g−1 se obtiene
[g−1 ◦ g ◦ (f ◦ g)−1
](x) = (g−1 ◦ f−1)(x)
de donde:(f ◦ g)−1(x) = (g−1 ◦ f−1)(x).
�
2.4. LA INVERSA DE UNA FUNCIÓN 61
Teorema 2.13 Dada una función f : X → Y , se tiene:a) Para A y B subconjuntos arbitrarios de X, f(A)− f(B) ⊂ f(A−B)b) Si f es inyectiva entonces para cualquiera A y B subconjuntos de X, f(A−B) = f(A)−f(B).
Demostración. Ejercicio.
Teorema 2.14 La función f : X → Y es inyectiva si y solamente si f(Ac) = (f(A))c paratodo A ⊂ X.
Definición 2.15 (Imagen Inversa de un Conjunto). Sea f : X → Y una función. SiB ⊂ Y definimos la imagen inversa de B como el conjunto
f−1(B) = {x ∈ X : f(x) ∈ B}
Teorema 2.16 Sea f : X → Y una función, entonces:a) para todo A ⊂ X, (f−1 ◦ f)(A) ⊂ Ab) f es inyectiva si y solamente si para todo A ⊂ X, (f−1 ◦ f)(A) = A.
Teorema 2.17 Sea f : X → Y una función, entonces:a) para todo B ⊂ Y , (f ◦ f−1) ⊂ Bb) f es sobreyectiva si y solamente si (f ◦ f−1)(B) = B para todo B ⊂ Y .
Teorema 2.18 Sea f : X → Y una función , sean B y C subconjuntos de Y , entonces:
• a) f−1(B ∪ C) = f−1(B) ∪ f−1(C)
• b) f−1(B ∩ C) = f−1(B) ∩ f−1(C)
• c) f−1(Bc) = (f−1(B))c
• d) Si B ⊂ C entonces f−1(B) ⊂ f−1(C)
• e) f−1(Y ) = X
• f) f−1(∅) = ∅.
2.4.3 Funciones trigonométricas inversas
Son las siguientes:arco seno arcsin xarco coseno arccosxarco tangente arctan xarco cotangente arccotxarco secante arcsecxarco cosecante arccscx
62 CAPÍTULO 2. FUNCIONES
Acontinuación se presenta la gráfica de la función arctan x
�
�X
Y
f(x) = arctan(x)
2.4.4 Funciones Hiperbólicas inversas
A continuación se presentan las funciones hiperbólicas inversas.
todas estas funciones, pueden expresarse en función del logaritmo como se ve a continuaciónen la siguiente tabla:
arcsenh x = ln(x+
√x2 + 1
)x ∈ R
arccosh x = ln(x+
√x2 − 1
)x ≥ 1
arctanh x =1
2ln
(1 + x
1− x
)x ∈ (−1, 1)
arccoth x =1
2ln
(1 + x
1− x
)x /∈ [−1, 1]
arcsech x = ln
(1 +
√1− x2x
)x ∈ (0, 1]
arccsch x = ln
(1
x+
√1 + x2
|x|
)
x �= 0
a continuación de demuestran algunas de éstas fórmulas.
2.5. FUNCIONES CRECIENTES Y DECRECIENTES 63
• Función arcsenh x. Sea y = arcsenh x, entonces senh y = x, luego:
x =1
2
(ey − e−y
)
por tanto: 2x = ey − e−y, multiplicando a ambos miembros por ey y ordenando seencuentra:
e2y − 2xey − 1 = 0despejando ey se tiene:
ey =1
2
(2x±
√4x2 + 4
)= x±
√x2 + 1,
claramente x <√x2 + 1 luego debemos tomar el signo positivo pues ey es siempre
positivo, con esta aclaración:
y = ln(x+
√x2 + 1
)
Válido para todo x, así
arcsenh x = ln(x+
√x2 + 1
)
• Función arctanh x. Sea y = arctanh x, entonces: tanh y = x de donde
ey − e−yey + e−y
= x,
esto es, ey − e−y = xey + xe−y, multiplicando por ey y ordenando:
e2y (1− x) = 1 + x
despejando y :
y =1
2ln
(1 + x
1− x
)
que es válido para los x que satisfacen la desigualdad1 + x
1− x > 0, esto es: x ∈ (−1, 1) .
2.5 Funciones Crecientes y Decrecientes
Definición 2.19 (Función creciente). Sea f : X ⊂ R → Y ⊂ R . Se dice que f escreciente si para cualesquiera x0 y x1 en X tal que x0 < x1 se tiene f(x0) ≤ f(x1).Si reemplazamos el símbolo ≤ (menor o igual) por < (menor ) la función f se llama estric-tamente creciente.
Ejemplo 2.19 La función f(x) = [x] es creciente y f(x) = x3 es estrictamente creciente.
64 CAPÍTULO 2. FUNCIONES
Definición 2.20 (Función decreciente). Sea f : X ⊂ R → Y ⊂ R . Se dice que f esdecreciente si para cualesquiera x0, x1 ∈ X tal que x0 < x1 se tiene f(x0) ≥ f(x1).Si reemplazamos el simbolo ≥ (mayor o igual) por > (mayor) la función f se llama estricta-mente decreciente.
Ejemplo 2.20 f(x) = −x+ 1 es estrictamente decreciente.
�
�X
Y
Función creciente�
�X
Y
Función decreciente
Teorema 2.21 Sea f : X → Y una función estrictamente creciente o estrictamente decre-ciente. Entonces f es inyectiva.
Demostración Sean x0 y x1 puntos distintos en X. Sin perdida de generalidadpodemos suponer x0 < x1, luego f(x0) < f(x1) o f(x0) > f(x1), en todo casof(x0) �= f(x1), así, f es inyectiva.�
Teorema 2.22 Sea f : X → Y una función estrictamente creciente o estrictamente decre-ciente. Entonces f−1 esta definida en el rango de f, en particular si f es sobreyectiva f−1
esta definida en Y .
Ejemplo 2.21 La función f(x) = loga x con a > 1, es estrictamente creciente f : R+ → R.Luego f−1 : R→ R+ existe. La inversa está definida por f−1(x) = ax.
Ejercicios resueltos
Ejercicio 2.14 Sea f : R → R definida por f(x) = x2 + 1. Discutir la inyectividad, sobre-yectividad y la inversa.
2.6. FUNCIONES ACOTADAS 65
Solución.Inyectividad. f no es inyectiva pues para −1 y 1 en el dominio de f se tiene f(−1) =
f(1) = 2 siendo que −1 �= 1.Sobreyectividad. f tampoco es sobreyectiva pues para 0 ∈ Cf no existe preimagen ya queno existe x ∈ Df tal que f(x) = x2 + 1 = 0.De lo anterior deducimos que f−1 no puede definirse con el dominio y codominio dados. Sinembargo redefinamos f del siguiente modo:
f : R+ ∪ {0} → [1,∞) yf(x) = x2 + 1.
Mostraremos que ahora f si es biyectiva, esto es, inyectiva y sobreyectiva.Inyectividad. Sean x0, x1 ∈ R+ ∪ {0} y supongamos que
f(x0) = f(x1),
entoncesx20 + 1 = x21 + 1,
luego x0 = x1, notemos que x0 = −x1 tambien es una solución pues x20 + 1 = (−x1)2 + 1 =x21+1, esto no es posible pues en tal caso o x0 o x1 no es elemento de R+∪{0}, de lo anteriorf debe ser inyectiva.Sobreyectividad. Sea y0 ∈ [1,∞), luego de y0 = x20 + 1 obtenemos x0 =
√y0 − 1 asi existe
x0 =√y0 − 1 tal que f(x0) = y0 y esto muestra que f es sobreyectiva.
Por lo anterior f es biyectiva y f−1 existe.Cálculo de la inversa. Para encontrar la regla de correspondencia de f−1 se prosigue
como sigue: Hacemosf(x) = y
y se obtiene la ecuacióny = x2 + 1,
despejando x obtenemosx =
√y − 1
y se define la función inversa como
f−1(x) =√x− 1
Observemos que f−1 : [1,∞)→ R+ ∪ {0}.
2.6 Funciones acotadas
Definición 2.23 Una función f con dominio Df es acotada en Df si el conjunto
{f(x) : x ∈ Df}
es acotado, esto es, f es acotada en Df si existe un número k > 0 tal que |f(x)| ≤ k paratodo x ∈ Df , en tal caso k se llamará cota de f en el dominio Df .
66 CAPÍTULO 2. FUNCIONES
Nótese que si la funciòn f es acotada, entonces la gráfica de f en el dominio Df está dentrola franja dada por las rectas y = −k y y = k.
x
( ) fDxkxf ∈∀≤
( )baDf ,=
ky −=
ky =
ba
y
Teorema 2.24 Sea f : [a, b]→ R, creciente o decreciente entonces f es acotada en [a, b].
Demostración: a) Caso f creciente. En este caso claramente f(a) ≤ f(x) ≤f(b) para todo x ∈ [a, b]. Tomando k = max {|f(a)| , |f(b)|} se tiene |f(x)| ≤ k.b) Caso f decreciente. Se muestra como en el caso (a)
�
Ejemplo 2.22 Sea f(x) = 2x+3, definida en {x : |x− 3| ≤ 1}, entonces −2 ≤ x ≤ 4. Comof es creciente en R, es en particular creciente en [−2, 4], luego f(−2) ≤ f(x) ≤ f(4) esto es,−1 ≤ f(x) ≤ 11, de donde |f(x)| < 11 para todo x ∈ [−2, 4].
Ejemplo 2.23 Sea f(x) = 12x2 − 22x definida en [0, 2]. En este caso f(0) = 0 y f(2) = 4.Decir 0 ≤ f(x) ≤ 4 para todo x en [0, 2 ] no es verdadero, pues por ejemplo 1 ∈ [0, 2] perof(1) = −10 y no es cierto que 0 ≤ −10 ≤ 4.Esto por supuesto no contradice el teorema anterior pues f(x) = 12x2 − 22x no es crecienteni decreciente en [0, 2]. Para acotar esta función procedemos como sigue:
Puesto que x ∈ [0, 2] , claramente |x| ≤ 2, luego
|f (x)| =∣∣12x2 − 22x
∣∣
≤ 12 |x|2 + 22 |x|≤ 12
(22)+ 22 (2) = 92,
así la cota buscada es 92.
En los siguientes ejercicios se dan otros métodos para acotar funciones.
2.6. FUNCIONES ACOTADAS 67
Ejercicios resueltos
Ejercicio 2.15 Acotar f(x) = x2 + 1 en (−1, 1).Solución. Observemos que para cualquier x ∈ (−1, 1) se tiene |x| < 1, luego
|f(x)| = |x2 + 1|≤ |x|2 + 1= 1 + 1 = 2
Luego f(x) esta acotado por 2, es decir |f(x)| < 2 para todo x ∈ (−1, 1).Ejercicio 2.16 Acotar f(x) = x3 − 3x2 + 2x+ 5 en el conjunto {x : |x− 4| < 1}.Solución. Observemos que si x ∈ {x : |x− 4| < 1} , entonces: 3 < x < 5.
Método 1. De
3 < x < 5,
concluimos con |x| < 5, por tanto|f(x)| = |x3 − 3x2 + 2x+ 5|
Luego |f(x)| < 266 para x ∈ Df .Usando el Método 3 del ejercicio anterior se puede mejorar esta cota.
Ejercicio 2.18 Acotar f(x) = x3 − x+ cosx para los números x tales que |x+ 2| < 3.Método 1. Si |x+ 2| < 3 se tiene −5 < x < 1, luego |x| < 5, con este resultado escribimos
Consideremos la función f : R → R definida por f(x) = x − [x] cuya gráfica se muestra acontinuación.([x] es el mayor entero menor o igual a x.)
101−
y
x22−
( ) [ ]xxxf −=
1
5.0
5.0
Con puntos ”cercanos a 0.5” construimos la siguiente tabla:
x f(x)0.498 0.4980.499 0.4990.5 0.50.501 0.5010.502 0.502
podemos observar que para ”puntos cercanos” a 0.5 las imágenes estan ”cerca” de f(0.5) =0.5.
69
70 CAPÍTULO 3. LÍMITES Y CONTINUIDAD
Con ”puntos cercanos a 1” se construye la siguiente la tabla:
x f(x)0.998 0.9980.999 0.9991.0 0.1.001 0.0011.002 0.002
observemos que para valores ”cercanos” a x = 1 las imagenes cambian abruptamente de0.999 a 0. con esto se ratifica lo que geométricamente se ve en el gráfico de f . En el gráfico,la función f no tiene trazo continuo cerca de x = 1, observemos también que el trazo escontinuo cerca de x = 0.5. Así diremos, aunque imprecisamente, que una funciónes continua en un punto x = a si su gráfico tiene trazo continuo para ”valorescercanos” de a, en caso contrario es discontinua. Observemos que con la noción antesdada f es discontinua en cualquier entero n.
La anterior discusión carece de rigurosidad, se ha hablado de conceptos como ”cerca” o”valores cercanos”. En las siguientes secciones se dan los fundamentos rigurosos de continui-dad.
Ejercicios propuestos1. Realizar el gráfico de la función f(x) = [x]. ¿Tiene trazo continuo?
2. Realizar el gráfico de la función f(x) = x2 − [x]. Calcular tablas para valores cercanosa x = 2 y x = 1.5. ¿En que puntos es discontinua f?
3. Sea f(x) =1
x. ¿Es f continua en x = 0?
4. Sea f(x) ={x3 si x ∈ (−∞, 1]−2x+ 3 si x ∈ (1,∞) .
¿Es f continua en x = 1?
5. Sea f(x) =1
x2. ¿Es f continua en x = 0?
3.2 Límite de una Función
En esta sección se da la definición de límite, definición empleada fundamentalmente pararealizar demostraciones de teoremas centrales del cálculo.
Para futura discusión se requiere la siguiente definición.
Definición 3.1 (Vecindad de un Punto). Sea p un punto. Cualquier intervalo abiertoque contiene p es llamado una vecindad de p.
3.2. LÍMITE DE UNA FUNCIÓN 71
Ejemplo 3.1 Los siguientes intervalos son vecindades de p = 1 : (0, 2), (0.4, 0.7), (1− ε, 1 + ε)para ε > 0.
Una vecindad de p se denotará con el símbolo Vp o V (p). Un caso particular es cuandoV (p) = (p− ε, p+ ε) , entonces la vecindad se denotará con V (p, ε). Observemos que
así dado ε > 0 el conjunto de los x que satisfacen |x− p| < ε es una vecindad de p.Observación. Una vecindad de p de la forma (p− ε, p+ ε) es un intervalo abierto centrado
en p y radio ε.
3.2.1 Definición de Límite
Definición 3.2 Sea I una vecindad de p, sea f una función definida en I, a excepción quizásde p (f no necesariamente definida en p). Se dice que
limx→p
f (x) = L
Si para todo ε > 0, existe δ > 0 tal que
si 0 < |x− p| < δ entonces |f (x)− L| < ε.
Observación. En términos de vecindades lo anterior significa que si x se encuentra en lavecindad V (p, δ) entonces f (x) se encuentra en la vecindad V (L, ε) .
A veces, escribiremos x − p → 0 en lugar de x → p. Con h = x − p, así son que sonequivalentes
limx→p
f (x) = L y limh→0
f(p+ h) = L
que se conoce como cambio de variable.La definición intuitivamente establece que puntos cercanos a p tienen sus imágenes cercanas
o iguales a L. Por otra parte L no será el límite de f (x) en x = p si algún elemento ”cerca”a p tiene imagen ”lejos” de L.
Para mostrar que el límite de una función en cierto punto p, digamos es L, es necesarioestimar inicialmente este valor y para eso es conveniente evaluar la función en puntos cadavez más cercanos al punto p y observar a que valor se acercan las imágenes. Dicho valor es,posiblemente, el límite buscado.
A continuación se muestra gráficos para ilustrar el hecho de que un número L es el límite
72 CAPÍTULO 3. LÍMITES Y CONTINUIDAD
y cuando no lo es.
pε−p ε+p
( ) Lxfpx
=→
lim ( ) Lxfpx
≠→
lim
x
y ( )xf
L
ε+L
ε−L
x
y
( )xf
x
( )xf
x
( )xf
L
ε+L
ε−L
ε−p ε+pp
Ejemplo 3.2 Consideremos la función f (x) = 3x − 1, entonces podemos probar que limx→1
f (x) = 2, en efecto, para ε > 0 existe δ =ε
3tal que si |x− 1| < δ entonces
|f(x)− 2| = |3x− 1− 2|= 3 |x− 1|< 3δ = 3
ε
3= ε,
esto es, |f(x)− 2| < ε. En particular con ε = 0.3 tenemos δ =ε
3= 0.1. Nótese que para
puntos cercanos de 1, sus imágenes están cerca de 2.
Ejemplo 3.3 Sea la función f (x) = x+1, entonces limx→1
f (x) �= 3, esto es, limx→1
f (x) no puede
ser 3, en efecto, si ε = 0.5 , para todo δ > 0 existen valores como x0 tales que |x0 − 1| < δ y|f(x0)− 3| > 0.5, por ejemplo si δ >= 0.2 podemos tomar x0 = 1.1. Claramente |x0 − 1| < δy |f (x0)− 3| = |2.1− 3| = 0.9 > 0.5.
Existen funciónes como f (x) = [x] en los cuales la función está definida en un punto perono existe el límite en dicho punto. Por ejemplo, si x = 1, f (1) = 1 pero el límite no es L = 1como se muestra en la siguiente figura. Sin embargo, podemos decir cuál es el límite por laizquierda y cual por la derecha, para precisar esto, se dan las correspondientes definiciones:
y
1−
( ) [ ]xxf =
0 3212−
2−
1−
2
1
x
3.2. LÍMITE DE UNA FUNCIÓN 73
3.2.2 Límites Laterales
Definición 3.3 El límite lateral por la derecha de una función f en un punto p denotado porlimx→p+
f (x) es definido como:
limx→p+
f (x) = L
si para para todo ε > 0 existe δ > 0 tal que si
0 < x− p < δ entonces |f (x)− L| < ε.
La expresión x→ p+ significa que se toman valores cercanos a p por la derecha.
Ejemplo 3.4 Sea f (x) = [x] , entonces limx→1+
f (x) = 1.
Ahora definimos el límite lateral por la izquierda
Definición 3.4 El límite lateral por la izquierda de una función f en un punto p denotadopor lim
x→p−f (x) es definido como:
limx→p−
f (x) = L
si para todo ε > 0 existe δ > 0 tal que si
−δ < x− p < 0 entonces |f (x)− L| < ε
Ejemplo 3.5 Consideremos la función f definida por f (x) = [x], entonces limx→1−
f (x) = 0.
Respecto de los lìmites laterales se tienen los siguientes resultados.
Teorema 3.5 Si limx→p
f (x) existe entonces los lìmites laterales en x = p existen y son iguales.
El anterior teorema en su forma contrapositiva dice que ”Si los límites laterales deuna función en un punto p son distintos, el límite en p no existe”.
Ejemplo 3.6 Sea f (x) = [x], entonces para todo entero n, limx→n+
f (x) = n, y limx→n−
f (x) =
n− 1, luego si n es un entero, el límite limx→n
f (x) no existe.
74 CAPÍTULO 3. LÍMITES Y CONTINUIDAD
3.2.3 Propiedades de Límites
Teorema 3.6 El límite de una constante es la misma constante.
Demostración. Sea f (x) = k para todo x ∈ Df . probaremos que para a ∈ Df
se cumplelimx→a
f (x) = k,
en efecto si ε > 0, |f (x)− k| = |k − k| = 0 < ε, así para todo ε > 0 existe δ > 0,tal que si |x− a| < δ entonces |f (x)− k| < ε. (observemos que en este casoparticular δ puede ser cualquier número positivo).�
Teorema 3.7 Si limx→p
f (x) existe, este es único.
Demostración. Supongamos que L1 y L2 son los límites de f (x) cuando x→ p.Entonces si ε > 0 existe δ > 0 tal que si |x− p| < δ se tiene |f (x)− L1| <
Puesto que ε es arbitrario, debemos tener |L1 − L2| = 0; de este resultado L1 = L2.�
Teorema 3.8 Sean f y g funciones tales que limx→p
f (x) = A y limx→p
g (x) = B, entonces:
(i) limx→p
(f (x)± g (x)) = A±B(ii) lim
x→pf (x) g (x) = AB
(iii) limx→p
f (x)
g (x)=A
Bsi B �= 0.
Demostración.
(i) Si ε > 0, existen δ1 y δ2 > 0 tales que si |x− p| < δ1 y |x− p| < δ2 se tiene
|f (x)−A| < ε
2y |f (x)−B| < ε
2luego
|f (x)± g (x)− (A±B)| ≤ |f (x)− A|+ |g (x)−B|
<ε
2+ε
2= ε
por tanto |f (x)± g (x)| < ε siempre que |x− p| < δ donde δ = min {δ1, δ2}.
3.2. LÍMITE DE UNA FUNCIÓN 75
(ii) Para demostrar esta parte, escribimos
|f (x) g (x)− AB| = |f (x) (g (x)−B) +B (f (x)− A)| se ha sumado yrestado Bf (x)
≤ |f (x)| |g (x)−B|+ |B| |f (x)− A|Si x → p es claro que g (x) − B → 0, y f (x) − A → 0, así si |f (x)| no se hacegrande |f (x) g (x)− AB| → 0, mostraremos que efectivamente |f(x)| no se hacearbitrariamente grande. Para el número 1, existe δ3 > 0 tal que si
|x− p| < δ3, entonces |f (x)−A| < 1,puesto que |f (x)| = |f (x)−A+ A| se tiene |f (x)| ≤ |f (x)− A| + |A| de donde|f (x)| ≤ 1 + |A|.Por otra parte, para ε > 0 existen δ1 > 0 y δ2 > 0 tales que
luego |f (x) g (x)− AB| < ε siempre que |x− p| < δ, donde δ = min {δ1, δ2, δ3}.
(iii) Puesto quef (x)
g (x)=f (x)
B· B
g (x)es suficiente probar que lim
x→p
B
g (x)= 1, porque
entonces:
limx→p
f (x)
g (x)=limx→p
f (x)
B· limx→p
B
g (x)=A
B
Sin pérdida de generalidad, supongamos que B > 0. Para ε > 0 existe δ1 tal
que |g(x)−B| < εB
2, siempre que |x− p| < δ1. También existe un δ2 tal que
|g(x)−B| < B
2. Eligiendo δ = min {δ1, δ2}, se tiene:
|g (x)−B| < εB
2y |g(x)−B| < B
2
siempre que |x− p| < δ. De la segunda desigualdad, obtenemos |g(x)| > B
2de
donde1
|g(x)| <2
Bfinalmente
∣∣∣∣B
g (x)− 1∣∣∣∣ =
|g(x)−B||g(x)| <
εB
2· 2B= ε
76 CAPÍTULO 3. LÍMITES Y CONTINUIDAD
luego
∣∣∣∣B
g (x)− 1∣∣∣∣ < ε siempre que |x− p| < δ, esto prueba (iii).
�
Corolario 3.9 Si k es una constante, entoncesi) lim
x→p(k + f (x)) = k+ lim
x→pf (x)
ii) limx→p
k · f (x) = k· limx→p
f (x).
Demostración: Se sigue del teorema previo con g (x) = k.
Teorema 3.10 (Teorema del emparedado) Si f (x) ≤ g (x) ≤ h (x) en algún dominio, ylimx→p
f (x) =limx→p
h (x) = L entonces limx→p
g (x) = L.
Demostración. Ejercicio.
3.3 Un algoritmo para demostrar Límites
Supóngase que se desea mostrar:limx→p
f (x) = L.
Para aplicar la definición en términos de ε y δ debemos probar que dado un ε > 0, es posibleencontrar un δ > 0 tal que si 0 < |x− p| < δ para x ∈ Df , entonces |f(x)− L| < ε oequivalentemente |f(x)− L| < ε siempre que 0 < |x− p| < δ, x ∈ Df .
En esta sección, se dará un algoritmo general para encontrar δ dado ε. (se sugiere, paraesta parte, repasar la sección sobre cotas de una función del capítulo precedente)
• 1) Se da ε > 0. A partir de este momento ε se considera fijo.
• 2) De |f (x)− L| se obtiene :
|f (x)− L| ≤ |x− p| |g (x)| .
• 3) Se supone |x− p| < q, donde q es un número elegido de modo que la vecindad V (p, q)se encuentre en el dominio. Luego se procede a la acotación de g (x) en el conjunto
{x : |x− p| < q} ,
obteniendose |g(x)| ≤M , M > 0.
• 4) Se toma δ = min{q,ε
M
}, así encontramos el δ buscado.
3.3. UN ALGORITMO PARA DEMOSTRAR LÍMITES 77
• 5) Fin
Justificación Procedemos a justificar el anterior algoritmo.Sea ε > 0, de |f (x)− L| factorizamos |x− p| y obtenemos |f (x)− L| = |x− p| |g (x)|.
Procedemos a la acotación de g (x) en el dominio {x : |x− p| < q} donde q es un número arbitrario.Se tiene ahora
|f(x)− L| ≤ |x− p| |g(x)| ≤ |x− p|Msiempre que 0 < |x− p| < q. Por otra parte, debemos tener
|f(x)− L| ≤ |x− p|M < ε,
luego |x− p| < ε
M, pero también |x− p| < q. Por tanto tomamos δ = min
{q,ε
M
}y entonces
tenemos |f(x)− L| ≤ |x− p|M < ε siempre que |x− p| < δ.Observaciones
• (1) Observemos que lo anterior, depende de la acotación de g (x) en el conjunto {x : |x− p| < q}para algún q.
• (2) Debemos observar también que el algoritmo ε− δ no dice como encontrar el númeroL, lo que hace es permitirnos mostrar si es o no evidente que L es el límite de la funciónf en el punto dado p.
Ejercicios resueltosEjercicio 3.1 Demostrar que lim
x→3f (x) = 34, donde f (x) = x3 + x2 − x+ 1.
Solución. Con L = 34 se tiene:
• Paso 1. Sea ε > 0.
• Paso 2.f (x)− L = x3 + x2 − x+ 1− 34
= x3 + x2 − x− 33= (x− 3) (x2 + 4x+ 11)
de lo anterior f (x)− L = (x− 3) g (x), donde g (x) = (x2 + 4x+ 11).• Paso 3. Procedemos ahora a acotar g en algún intervalo abierto que contenga al puntox = 3. Acotemos en la vecindad V (3, 1) = {x : |x− 3| < 1}. Si x ∈ V (3, 1) , entoncesobviamente |x− 3| < 1, luego:
• Paso 3. Acotemos g en el conjunto V (2, 1) = {x : |x− 2| < 1} de esto tenemos |x| =|x− 2 + 2| ≤ |x− 2|+ |2| < 1 + 2 = 3, es decir, |x| < 3, por tanto
(x4 + 2x3 − x2 − 2x) = 0 : usar V (−1, 1)En los siguientes ejercicios dar las razones por las cuales el límite dado no es correcto.
15. limx→2(x2 − 4) = 1.
16. limx→π/2
sin x = 0.
3.4 La Definición de Continuidad de una Función
Consideremos la función f definida en R cuya regla de correspondencia es
f (x) =
{5 x �= 110 x = 1
�
� �1
10
5
Y
X
Podemos observar que limx→1
f (x) = 5 �= f (1). En general si limx→p
f(x) = L, no tenemos
necesariamente que L = f(p), si éste es el caso y f(p) está definida diremos que la función escontinua. Para mayor precisión definimos la:
3.4.1 Continuidad en un Punto
Definición 3.11 (Continuidad en un punto). Una función f es continua en un punto psi
a) f está definida en pb) lim
x→pf(x) = f(p)
Es claro que la parte (b) es equivalente a: para todo ε > 0 existe δ > 0 tal que si |x− p| < δentonces |f(x)− f(p)| < ε.
84 CAPÍTULO 3. LÍMITES Y CONTINUIDAD
Una función f es discontinua si no cumple alguna de las condiciones (a) o (b) de ladefinición.
Observación. Claramente si f es contínua en p debemos tener:
limx→p+
f (x) = limx→p−
f (x)
Ejemplo 3.7 La función f definida por f(x) = x2 es continua en x = 1, pues f(1) = 1 ylimx→1
f(x) = 1 = f(1).
Ejemplo 3.8 La función f definida por f(x) = [x] no es continua en x = 1 pues el límite enx = 1 no existe.
Ejemplo 3.9 La función f definida por f(x) =1
x2no es continua en x = 0 pues, lim
x→0
1
x2no
existe.
�
�X
Y
f(x) = 1x2
Definición 3.12 (Continuidad en un conjunto) f : X → Y es continua en X si f escontinua en todo punto p ∈ X.
Ejemplo 3.10 La función f definida por f(x) =1
x2es continua en R− {0}, pero no en R.
A continuación se presentan los teoremas más importantes sobre continuidad.
Teorema 3.13 Sean f y g funciones continuas en un punto p. Entonces la suma f + g, ladiferencia f − g y el producto fg son continuas en p. Si g(p) �= 0 entonces f/g es tambiéncontinua en p.
Teorema 3.14 Supongamos que f es continua en p y g es continua en f(p). Entonces g ◦ fes continua en p.
3.4. LA DEFINICIÓN DE CONTINUIDAD DE UNA FUNCIÓN 85
Demostración: Sin pérdida de generalidad podemos suponer que Rf = Dg = B,
esto es, Df−→
f Bg−→Cg.
Sea ε > 0. Al ser g continua en f (p), existe ε1 > 0 tal que
|g (y)− g (f (p))| < ε
siempre que |y − f (p)| < ε1. Usando la continuidad de f en p, existe δ > 0 talque
|f (x)− f (p)| < ε1
siempre que |x− p| < δ. Luego para ε > 0 existe δ tal que
siempre que |x− p| < δ. Esto muestra que g ◦ f es continua en p.�
Ejemplo 3.11 Sea h(x) = cosx2. Con f(x) = x2 y g(x) = cosx tenemos h(x) = (g ◦ f)(x).Puesto que cosx y x2 son continuas en todo R, h es continua en todo R.
Ejemplo 3.12 Sea h(x) =1
(x− 2)2 , con f(x) = (x − 2)2 y g(x) =1
x, tenemos h(x) =
(g ◦ f)(x). La función f(x) es continua en x = 2 pero f(2) = 0 y g no es continua en f(2) yh no es continua en x = 2.
Teorema 3.15 Los polinomios son funciones continuas en toda la recta real.
La demostración es un ejercicio. Observemos que si p es un polinomio en x, entonces paratodo p se tiene: lim
x→pf (x) = f (p) .
Corolario 3.16 Si p (x) y q (x) son polinomios, entonces el cocientep (x)
q (x)es continua en
todo p tal que q (p) �= 0.
3.4.2 Preservación del signo en funciones continuas
El siguiente teorema cuya interpretación geométrica es evidente es de grán aplicación en elCálculo y en general en el análisis.
Teorema 3.17 Sea f continua en c y supongamos que f(c) �= 0. Entonces existe un intervalo(c− δ, c+ δ) en la que f tiene el mismo signo que f(c).
Demostración: Supongamos que f(c) > 0. Por la continuidad de f , con ε =f(c)
2, existe δ > 0 tal que
|f(x)− f(c)| < 12f(c)
86 CAPÍTULO 3. LÍMITES Y CONTINUIDAD
siempre que |x− c| < δ, luego
1
2f (c) < f (x) <
2
3f (c)
siempre que c− δ < x < c+ δ. Por tanto f(x) > 0 en (c− δ, c+ δ).Si f(c) < 0, tomamos ε = −f (c)
2.
�
3.4.3 Teorema de Bolzano
Teorema 3.18 (Teorema de Bolzano1). Sea f continua en el intervalo cerrado [a, b] ysupongamos que f (a) y f (b) tienen signos opuestos. Entonces existe al menos un punto en(a, b) tal que f (c) = 0.
3.4.4 El teorema del Valor Intermedio
Teorema 3.19 (Teorema del Valor Intermedio). Sea f continua en [a, b]. Sean x1, x2puntos en [a, b] tales que x1 < x2 tal que f(x1) �= f(x2). Entonces para cada valor y0 en-tre f(x1) y f(x2) existe x0 ∈ (x1, x2) tal que f(x0) = y0.
Demostración. Sin pérdida de generalidad supongamos que
f(x1) < y0 < f(x2)
Sea g(x) = f(x)− y0, es claro que g es continua en [a, b], además
g(x1) = f(x1)− y0 < 0y
g(x2) = f(x2)− y0 > 0,entonces por el Teorema de Bolzano existe c ∈ (x1, x2) tal que g(c) = 0, por tantof(c)− y0 = 0 de donde f(c) = y0.�
A continuación se presenta un teorema que garantiza la existencia de raices n-ésimas.
Teorema 3.20 Si n es un entero positivo y si a > 0, entonces existe exactamente un númeropositivo b tal que bn = a.
Demostración: Sea c un número tal que 0 < a < c, c > 1 consideremos lafunción f : [0, c]→ R definida por f(x) = xn, es claro que f(0) = 0 < f(c) = cn,además puesto que c > 1 se tiene c < cn luego 0 < a < cn. Por el Teorema delValor Intermedio existe b ∈ (0, c) tal que f(b) = a, esto es, bn = a. El número bes único pues f es inyectiva al ser f estrictamente creciente.
�
1Bernhard Bolzano 1781-1848, hijo de un comerciante en obras de arte nació en Praga, Bohemia (Checos-lovaquia). Aunque se ordenó como sacerdote hizo importantes contribuciones a las matemáticas.
3.4. LA DEFINICIÓN DE CONTINUIDAD DE UNA FUNCIÓN 87
Ejercicios resueltosEjercicio 3.8 Mostrar que f (x) = xn, es continua en todo p.
Solución. Tenemos f (p) = pn, además fácilmente se muestra:
limx→p
xn = pn,
luego f es continua en p.
Ejercicio 3.9 Encontrar el valor de T tal que la función f definida por
f(x) =
{x2 − x− 2 si x < 2x− T + 1 si x ≥ 2
sea continua en todo su dominio.
Solución. Queda claro que x2−x−2 es continua en (−∞, 2) y x−T es continua en [2,∞)para cualquier T . Sin embargo f(x) no necesariamente es continua en x = 2, por ejemplo siT = 0 se tiene
f(x) =
{x2 − x− 2 si x < 2x+ 1 si x ≥ 2
limx→2−
f (x) = limx→2−
x2 − x− 2 = 0,y
limx→2+
f (x) = limx→2+
x+ 1 = 3,
así limx→2−
f(x) �= limx→2+
f(x), esto muestra que para T = 0, f no es continua en x = 2. Si
deseamos que f sea continua en x = 2 debemos tener los límites laterales iguales en x = 2,esto es,
limx→2−
f(x) = limx→2+
f(x)
pero:limx→2−
f(x) = 0 y limx→2+
f(x) = 3− T,
luego debemos tener 0 = 3−T de donde T = 3, así f es continua en x = 2 siempre que T = 3.
�
�X
Y
����
���
T=0
−1 1 2
3
2
1
�
�X
Y
����
���
T=3
−1 1 2
3
2
1
88 CAPÍTULO 3. LÍMITES Y CONTINUIDAD
Ejercicio 3.10 Encontrar el valor de k tal que la función definida por
f(x) =
{x2 + (k − 1)x si x < 1
−32x2 +
11
2x− (2 + k) si x ≥ 1
es continua.Solución. Claramente f es continua en todo punto x �= 1, analizamos el caso x = 1.
limx→1−
f(x) = 1 + (k − 1) = k
y
limx→1+
f(x) = −32+11
2− (2 + k) = 2− k.
Para que f sea continua en x = 1, los límites laterales deben ser iguales, es decir, k = 2− k,de donde k = 1.Así
f(x) =
{x2 si x < 1
−32x2 +
11
2x− 3 si x ≥ 1
es continua en x = 1 y con ello continua en todo el dominio.
Ejercicios propuestos1. Demostrar que f (x) = x3 − 2 es continua en todo número real.
2. Sea
f (x) =
x2 − 9x− 3 si x �= 3A si x = 3
¿Para que valor de A esta función es continua en todo su dominio?. Sol. A = 6.
3. Sea
f (x) =
−2x+ 5 si x ∈ (−∞, 0)A+ 2 si x ∈
[0,5
2
)
4x−B si x ∈[5
2, 10
]
¿Para que valores de A y B la función dada es continua en todo su dominio? Sol.A = 3, B = 5.
4. ¿Para que valores de T la siguiente función es continua en todo su dominio?
f (x) =
{T 2x2 + x− 1 si x ∈ (−∞, 1)x− 5 si x ∈ [1,∞)
Sol. No existen.
3.5. CÁLCULO DE LÍMITES 89
5. ¿Para que valores de K la siguiente función es continua en x = 5?
f (x) =
{ 4x+ 5
K + xsi x ∈ (0, 5)
K2 + x si x ∈ [5,∞)
Sol. K ∈{
0,−5±
√5
2
}
.
3.5 Cálculo de Límites
3.5.1 El símbolo ∞• Si el valor numérico de una variable x va tomando valores positivos mayores a cualquiervalor asignado de antemano, se dice que x tiende a infinito y se escribe:
x→∞.
• Si el valor numérico de una variable x va tomando valores negativos menores a cualquiervalor asignado de antemano, se dice que x tiende a menos infinito y se escribe:
x→ −∞.
• Se escribe:limx→a
f (x) =∞
si f (x) va tomando valores mayores a cualquier valor asignado de antemano a medidaque x se aproxima al valor a, es claro que lim
x→af (x) no existe, pero por abuso de lenguaje
se escribe de esa manera. Una situación similar se tiene para el caso −∞.
Ejemplo 3.13 Si x solo toma valores positivos:
limx→0
a
x=
{∞ si a > 0−∞ si a < 0
3.5.2 Indeterminaciones
Para el cálculo de límites en el caso de funciones continuas se procede por evaluación directaexcepto. En el caso de funciones no continuas se puede tener una de las siguientes fomasluego de realizar la evaluación:
0
0, 1∞, 00, ∞−∞
tales casos se llamarán indeterminaciones.
90 CAPÍTULO 3. LÍMITES Y CONTINUIDAD
3.5.3 El paso al límite
Si en la expresión limx→p
f (x), calculamos f(p), diremos que hemos hecho la operación paso al límite,
si este paso nos lleva a una indeterminación entonces, antes del ”paso al límite”, pueden em-plearse todas las operaciónes algebraicas que se deseen y requieran, de manera que se eliminela indeterminación, si es posible.
Técnicamente si el paso al límite en limx→p
f (x) no puede realizarse reemplazamos f por una
función continua igual a f a excepción del punto p.
Ejercicios resueltosEjercicio 3.11 Calcular lim
x→5x3 − x2 + 3x+ 6
Solución. limx→5(x3 − x2 + 3x+ 6) = 125− 25 + 15 + 6 = 121, en este ejercicio, el paso al
límite es inmediato.
Ejercicio 3.12 Calcular limx→4
x− 4x2 − 11x+ 28
Solución. En este ejercicio, no podemos hacer el paso al límite, pues tendríamos0
0que
no está definido, sin embargo:
x− 4x2 − 11x+ 28 =
x− 4(x− 4) (x− 7) =
1
x− 7 ,
la cancelación del factor x − 4 es válida, pues x → 4 quiere decir x tiende a 4, sin llegarnunca a el, luego
limx→4
x− 4x2 − 11x+ 28 =limx→4
1
x− 7 =1
4− 7 = −1
3.
Ejercicio 3.13 Calcular limx→3
9− x25−
√x2 + 16
.
Solución. Aquí, el paso al límite, tampoco puede hacerse, pues tenemos0
0. Sin em-
bargo podemos usar técnicas algebraicas para romper con la indeterminación. Sea L =limx→3
3.5. CÁLCULO DE LÍMITES 91
9− x25−
√x2 + 16
, entonces
L = limx→3
(9− x2)(5 +
√x2 + 16
)(5−
√x2 + 16
) (5 +
√x2 + 16
)multiplicando y dividiendo
por(5 +
√x2 + 16
)
= limx→3
(9− x2)(5 +
√x2 + 16
)
25− (x2 + 16)
= limx→3
(9− x2)(5 +
√x2 + 16
)
9− x2 se cancela (9− x2)
= limx→3
(5 +
√x2 + 16
)
= 5 +√32 + 16 = 10
Ejercicio 3.14 Calcular limx→2
x− 2√x2 − 4
Solución. En este ejercicio el paso al límite no puede hacerse inmediatamente, antes deello procedemos a realizar algunas operaciones algebraicas.
limx→2
x− 2√x2 − 4
= limx→2
1√(x− 2)(x+ 2)(x− 2)2
= limx→2
1√x+ 2
x− 2
= limx→2
√x− 2√x+ 2
= 0
Ejercicio 3.15 Calcular limx→2
4− x23−
√x2 + 5
Solución.
limx→2
4− x23−
√x2 + 5
= limx→2
(4− x2)(3 +
√x2 + 5
)(3−
√x2 + 5
) (3 +
√x2 + 5
)
= limx→2
(4− x2)(3 +
√x2 + 5
)
4− x2= lim
x→2
(3 +
√x2 + 5
)= 6
Ejercicio 3.16 Calcular limx→−1
x2 + 3x+ 2
x2 + 4x+ 3
92 CAPÍTULO 3. LÍMITES Y CONTINUIDAD
Solución.
limx→−1
x2 + 3x+ 2
x2 + 4x+ 3= lim
x→−1
(x+ 1)(x+ 2)
(x+ 1)(x+ 3)
= limx→−1
x+ 2
x+ 3=1
2
Ejercicio 3.17 Calcular limh→0
(x+ h)3 − x3h
Solución.
limh→0
(x+ h)3 − x3h
= limh→0
x3 + 3x2h+ 3xh2 + h3 − x3h
= limh→0
h(3x2 + 3xh+ h2)
h
= limh→0
(3x2 + 3xh+ h2) = 3x2
Ejercicio 3.18 Calcular limx→1
x− 1√x2 + 3− 2
Solución.
limx→1
x− 1√x2 + 3− 2
= limx→1
(x− 1)(√x2 + 3 + 2)
(√x2 + 3− 2)(
√x2 + 3 + 2)
= limx→1
(x− 1)(√x2 + 3 + 2)
(x2 − 1)
= limx→1
√x2 + 3 + 2
x+ 1= 2
Ejercicio 3.19 Calcular limx→3
25− x25−
√x2 + 16
.
Solución. Evaluando el numerador en 3, obtenemos 25 − 32 = 16 de la misma manera,evaluamos el denominador en 3 y obtenemos 5−
√32 + 16 = 0, luego
limx→3
25− x25−
√x2 + 16
=16
0=∞.
Ejercicio 3.20 Calcular limx→3
9− x210−
√x2 + 16
.
Solución.
limx→3
9− x210−
√x2 + 16
=9− 32
10−√32 + 16
=0
5= 0.
3.5. CÁLCULO DE LÍMITES 93
Ejercicios propuestosCalcular los siguientes límites:
1. limx→0
x10 − x+ 1x2 − 1 Sol.: −1
2. limx→0
3x − 3−x3x + 3−x
Sol.: 0
3. limx→2
x2 − 4x2 − 5x+ 6 Sol.:−4
4. limx→1
x− 1√x2 + 8− 3
Sol.: 3
5. limx→0
{x x > 0x+ 1 x ≤ 0 Sol.: No existe.
6. limx→7
5−√3x+ 4
x2 − 49 Sol.: − 3
140.
7. limx→27
x− 273√x− 3 Sol.: 27.
8. limx→a
√x−√ax− a Sol:
1
2√a.
9. limx→a
x1/n − a1/nx− a =
a1
n
na
10. limx→3
√x2 − 2x+ 6−
√x2 + 2x− 6
x2 − 4x+ 3 Sol.: −13.
11. limx→1
√x+ 1−
√x2 + 1
x− 1 Sol.: −14
√2.
12. limx→
√2
x2 − 2√x2 + 2− 2
Sol.: 4
13. limx→2
√x2 − 2−
√2√
x3 − 4− 2Sol.:1
3
√2
14. limh→0
√(1 + h)3 + 5h+ 6−
√7
hSol.:
4
7
√7.
94 CAPÍTULO 3. LÍMITES Y CONTINUIDAD
15. limx→2
3√x5 − 3
√32
x− 2 Sol.:5
63√32
(Sug. (a− b) =(a1/3 − b1/3
) (a2/3 + a1/3b1/3 + b2/3
))
16. limx→5
√x+ x−
√5− 5
x− 5 Sol.: 1 +1
10
√5.
17. limx→a
√x+ x−√a− a
x− a Sol.: 12
2√a+ 1√a
.
18. limh→0
(7 + h)n − 7nh
, n ∈ N Sol.: n7n−1.
19. limx→2
3√256x− 8x− 2 Sol.:
4
3.
20. limx→−2
√−x3 + 2x− 2√
x2 + 5−√3x+ 15
Sol.:15
7.
21. limx→2
x− 2√x2 + 5− 3
Sol.:3
2.
22. limx→3
√x− 1−
√x2 − 4x+ 5
x− 3 Sol.:−14
√2
23. limx→3
√2x2 − 2− 4x2 − 2x− 3 Sol.:
3
8.
24. Determinar los valores de a y b de modo que la función dada sea continua en x = 8.
f (x) =
3− (3x+ 3)1/3a (x1/3 − 2) si x < 8
ab si x = 8
2
|2x− 7| b si x > 8
Sol. a = 2, b = −1/3.
3.6 Otros límites
3.6.1 Límites trigonométricos
Los límites básicos para calcular límites en donde intervienen funciones trigonométricas son
limx→p
sen x y limx→p
cosx,
las funciones seno y coseno son continuas en R, luego limx→p
sen x = sen p, limx→p
cosx = cos p.
3.6. OTROS LÍMITES 95
Teorema 3.21
limx→0
sen x
x= 1
Demostración: Consideremos la circunferencia de radio 1:
������������������
O
x
A
B
P
Q
�
del gráfico podemos deducir:
Area ∆OQP ≤ Area sector OAP ≤ Area ∆OAB, (3.1)
∴1
2·OQ ·QP ≤ 1
2· 1 ·AP ≤ 1
2·OA · AB
∴1
2cosx senx ≤ 1
2x ≤ 1
2tan x
De lo anterior obtenemos :sen x
x≤ 1
cosxy y cosx ≤ sen x
x,
por tanto
cosx ≤ sen xx
≤ 1
cosx,
luego tomando límite cuando x→ 0 y por el teorema del emparedado:
1 ≤limx→0
senx
x≤ 1,
esto prueba el teorema.
�
96 CAPÍTULO 3. LÍMITES Y CONTINUIDAD
Corolario 3.22
limx→0
1− cosxx
= 0.
Demostración:
limx→0
1− cosxx
= limx→0
(1− cosx)(1 + cosx)x(1 + cosx)
= limx→0
1− cos2 xx(1 + cosx)
= limx→0
(sen xx
)( sen x
1 + cosx
)
= limx→0
senx
xlimx→0
sen x
1 + cosx= 1 · 0 = 0
Ejercicios resueltosEjercicio 3.21 Calcular los siguientes límites
1. limx→0
sen 2x
x
2. limx→0
tan 2x
sen x
3. limx→0
sen 5x
sen x
4. limx→0
sen 5x− sen 3xx
5. limx→0
1− cosxx2
Solución.
1. limx→0
sen 2x
x= 2· lim
x→0
sen 2x
2x= 2 · 1 = 2.
3.6. OTROS LÍMITES 97
2. Usaremos las identidades: sen 2x = 2 cosx senx, cos 2x = cos2 x− sen2 x.
limx→0
tan 2x
senx= lim
x→0
sen 2x
senx cos 2x
= limx→0
2 cosx sen x
senx(cos2 x− sen2 x)
= limx→0
2 cosx
cos2 x− sen2 x = 2
Otro método:Para x próximo a cero senx = x, luego
limx→0
tan 2x
sen x= lim
x→0
sen 2x
cos 2x.1
x
= 2· limx→0
sen 2x
2x.1
cos 2x= 2
3.
limx→0
sen 5x
sen x= 5 lim
x→0
(sen 5x) / (5x)
(sen x) /x
= 5 limx→0
sen 5x
5xlimx→0
1
(sinx/x)
= 5
4.
limx→0
sen 5x− sen 3xx
= 5 limx→0
sen 5x
5x− 3· lim
x→0
sen 3x
3x= 5− 3 = 2
5.
limx→0
1− cosxx2
= limx→0
(1− cosx) (1 + cos x)x2(1 + cosx)
= limx→0
1− cos2 xx2(1 + cosx)
= limx→0
(sen xx
)2( 1
1 + cosx
)
=(limx→0
sen x
x
)2. limx→0
1
1 + cosx
= 1/2
98 CAPÍTULO 3. LÍMITES Y CONTINUIDAD
Ejercicio 3.22 Calcular limx→0+
x√1− cosx
Solución.
limx→0+
x√1− cosx = lim
x→0+
√x2(1 + cosx)
(1− cosx)(1 + cosx)
= limx→0+
√x2(1 + cosx)
1− cos2 x
= limx→0+
√√√√√1 + cosx(sen2 x
x2
) =√2
Ejercicio 3.23 Calcular limx→π/3
1− 2 cosxsen(x− π
3
) .
Solución. Se tiene cosπ
3=1
2, sen
π
3=
√3
2, Hacemos el cambio h = x − π
3. Entonces si
x→ π3, h→ 0, luego
limx→π/3
1− 2 cosxsen(x− π
3
) = limh→0
1− 2 cos(h+ π
3
)
senh
= limh→0
1− 2[cosh cos π
3− senh sen π
3
]
senh
= limh→0
1− cosh+√3 senh
senh
= limh→0
(1− coshsenh
+√3
)
= limh→0
((1− cosh) (1 + cosh)senh (1 + cosh)
+√3
)
= limh→0
(senh
1 + cosh+√3
)
=√3
Ejercicios propuestosHallar:
3.6. OTROS LÍMITES 99
1. limx→0
x− sin√2x
7x+ sin 4xSol.: 1
11− 1
11
√2.
2. limx→0
5− 5 cos 2x+ sin 4xx
Sol.: 4.
3. limx→0
tan ax
xSol.: a.
4. limx→3(x− 3) cscπx Sol.: −1
π.
5. limx→a
cosx− cos ax− a Sol.: − sin a.
6. limx→−2
tan πx
x+ 2Sol.: π.
7. limx→π
tanx− x2 + π2x− π Sol.: 1− 2π.
8. limx→π/4
sin x− cosx1− tan x Sol.: −1
2
√2.
9. limx→π/3
1− 2 cosxsin (x− π/3) Sol.:
√3.
10. limx→0
tan x− sin xx3
Sol.: 12.
11. limx→0
sin (a+ x)− sin (a− x)x
Sol.: 2 cos a.
12. limx→1(1− x) tan πx
2Sol.: 2
π.
13. limx→0
1− sin x2
π − x Sol.: 1π
14. limx→π/3
1− 2 cos xπ − 3x Sol.: −1
3
√3
15. limx→0
cos 2mx− cos 3nxx2
Sol.: −2m2 + 92n2.
16. limx→0
sinmx2 − sinnx2x2
Sol.: m− n.
17. limx→0
1− cosxsin x
Sol.: 0.
18. limx→π/2
cosx
1 + sin xSol.: 0.
100 CAPÍTULO 3. LÍMITES Y CONTINUIDAD
19. limx→2
4− x2sin πx
Sol.: − 4π.
20. limx→0
x− sin 3xx+ sin 4x
Sol.: −25.
21. limx→2
2−√2x
1− cos√x− 2 Sol.: −1.
22. limx→π
1−√cos (x− π)(x− π)2
Sol.: 14.
23. limx→π
√1− sin x−
√1 + sin x
x− π Sol.: 1.
24. Encontrar los valores de A y B tales que la siguiente función sea continua en todo sudominio
(a)
f (x) =
Asin x− sin 2
x− 2 si x ∈ [1.8, 2)
B +tanπ (x− 4)
x− 2 si x ∈ (2, 2.5]
(b)
f (x) =
Asin x− sin 2
x− 2 si x ∈ [1.8, 2)C si x = 2
B +tanπ (x− 4)
x− 2 si x ∈ (2, 2.5]
C un número real.
Sol.
(a) Todo A,B ∈ R.(b) Todos los puntos que satisfacen A cos 2−B = π.
3.7 Límites con Infinito
Definición 3.23 Se dice que limx→p
f(x) = ∞ si para todo M > 0 es posible encontrar δ > 0
tal que si0 < |x− p| < δ entonces f(x) > M
Intuitivamente esto significa que cuando x se aproxima a p (por la izquierda o la derecha) lasimágenes f (x) se hacen arbitrariamente grandes.
3.7. LÍMITES CON INFINITO 101
Ejemplo 3.14 limx→0
1
x2=∞, en efecto dado M > 0 se tiene f(x) > M ,
1
x2> M , |x| < 1√
M,
así se toma δ =1√M
.
Definición 3.24 Se dice que limx→p
f(x) = −∞ si para todo M < 0 es posible encontrar δ > 0
tal que si0 < |x− p| < δ entonces f(x) < M
Definición 3.25 limx→∞
f(x) = A si para todo ε > 0 es posible encontrar M > 0 tal que
x > M entonces |f(x)− A| < ε
Ejemplo 3.15 limx→∞
(1
x2+ 1
)= 1, en efecto, dado ε > 0 existe M =
1√εtal que si x > M,
entonces
|f(x)−A| =∣∣∣∣1
x2+ 1− 1
∣∣∣∣
=
∣∣∣∣1
x2
∣∣∣∣ =1
x2
<1
M2= ε.
Definición 3.26 limx→∞
f(x) =∞ si para todo M > 0 es posible encontrar N > 0 tal que
x > N entonces |f(x)| > M
Ejemplo 3.16 limx→∞
x2 = ∞, en efecto dado M > 0 se tiene |x2| = |x|2 > M , de donde
x >√M , luego tomamos N =
√M .
Los teoremas sobre límites (suma, resta, división y multiplicación) dados an-teriormente no necesariamente son válidos cuando los límites involucrados soninfinitos.
Ejemplo 3.17 Sean f (x) = x2 + 4, g (x) = x2, claramente
limx→∞
f (x) =∞, limx→∞
g (x) =∞,
también es claro quelimx→∞
(f (x)− g (x)) = limx→∞
4 = 4,
aquí no es válido el hecho que el límite de una diferencia es la diferencia de límites, esto es,
limx→∞
(f (x)− g (x)) �= limx→∞
f (x)− limx→∞
g (x)
si los límites involucrados son infinitos.
102 CAPÍTULO 3. LÍMITES Y CONTINUIDAD
Ejercicios resueltosEjercicio 3.24 Si n es un entero positivo, demostrar que lim
x→∞
1
xn= 0.
Solución. Sea ε > 0. Tenemos:∣∣∣∣1
xn
∣∣∣∣ =1
|x|n < ε,
de esta desigualdad encontramos |x| > 1
(ε)1/n. Haciendo M = ε−1/n, tenemos que efectiva-
mente ∣∣∣∣1
xn
∣∣∣∣ < ε,
siempre que |x| > M . Esto prueba que limx→∞
1
xn= 0.
Ejercicio 3.25 Calcular limx→∞
2x+ 1√2x2 − 2x+ 5
.
Solución. Al hacer el paso al límite encontramos ∞∞ , es decir una indeterminación. Via
operaciones algebraicas rompemos la indeterminación. Dividiendo numerador y denominadorpor x tenemos
limx→∞
2x+ 1√2x2 − 2x+ 5
= limx→∞
2 + 1/x√2− 2/x+ 5/x2
pero limx→∞
1
x= lim
x→∞
1
x2= 0, por tanto:
limx→∞
2x+ 1√2x2 − 2x+ 5
=2√2
Ejercicio 3.26 Calcular limx→∞
√x
√x+√x+
√x.
Solución.
limx→∞
√x
√x+√x+
√x= lim
x→∞
1√√√√1 +
√1
x+
√1
x3
= 1
Ejercicio 3.27 Si an y bp son números no nulos, discutir el límite:
Solución. veamos tres casos:(a) n = p. En este caso dividiendo numerador y denominador por xn tenemos:
Λ = limx→∞
1
xna0 +
1
xn−1a1 + · · ·+
1
xan−1 + an
1
xnb0 +
1
xn−1b1 + · · ·+
1
xap−1 + bp
=anbp
(b) Si n < p, p− n > 0. Dividiendo numerador y denominador por xp encontramos
Λ = limx→∞
1
xpa0 +
1
xp−1a1 + · · ·+
1
xp−n+1an−1 +
1
xp−nan
1
xpb0 +
1
xp−1b1 + · · ·+
1
xan−1 + bp
=0
bp= 0
observemos que todos los sumandos del numerador son nulos.(c) Si n > p se tiene Λ = +∞ o −∞.
Ejercicio 3.28 Calcular limx→∞
5x100 + x3 + 7
10x500 + 25.
Solución. Dividiendo numerador y denominador por x500 tenemos
limx→∞
5x100 + x3 + 7
10x500 + 25= lim
x→∞
1
x4005 +
1
x497+
1
x5007
10 +1
x50025
=0
10= 0
Ejercicio 3.29 Calcular limx→∞
x10 + x3 + 7
10x10 + 25.
Solución. Dividiendo numerador y denominador por x10 tenemos
limx→∞
x10 + x3 + 7
10x10 + 25= lim
x→∞
1 +1
x7+1
x107
10 +1
x1025
=1
10
Ejercicio 3.30 Calcular Λ = limx→∞
√x2 + 2x+ 3−
√x2 − 2x+ 3.
104 CAPÍTULO 3. LÍMITES Y CONTINUIDAD
Ejercicio 3.31 En este caso el límite es del tipo ∞ − ∞, es decir una indeterminación.Procedemos como sigue.
Λ = limx→∞
(√x2 + 2x+ 3−
√x2 − 2x+ 3
)√x2 + 2x+ 3 +
√x2 − 2x+ 3√
x2 + 2x+ 3 +√x2 − 2x+ 3
= limx→∞
4x√x2 + 2x+ 3 +
√x2 − 2x+ 3
= limx→∞
4√1 + 2/x+ 3/x2 +
√1− 2/x+ 3/x2
= 2
Ejercicio 3.32 Sea r un número tal que |r| < 1, entonces
limn→∞
rn = 0
La demostración es inmediata.
Ejercicio 3.33 Sea r un número tal que |r| < 1, para todo natural n definimos:
Sn = 1 + r + r2 + · · ·+ rn, (1)
entonceslimn→∞
Sn =1
1− rDemostración. Multiplicamos (1) por r
rSn = r + r2 + r3 + · · ·+ rn+1 (2)
restando (2) de (1) y despejando Sn tenemos
Sn =1
1− r(1− rn+1
)
si n tiende a ∞ y tomando en cuenta que limn→∞
rn+1 = 0, encontramos
limn→∞
Sn =1
1− r
Ejercicios propuestosCalcular los siguientes límites:
1. limx→∞
(√x+ 1−√x
)Sol.: 0.
2. limx→∞
(√2x2 −
√2x2 − 6x
)Sol.: 3
2
√2.
3.8. UN LÍMITE NOTABLE 105
3. limx→∞
1 + x+ 3x3 + x+ x5
1 + x5Sol.: 1.
4. limx→∞
3√x2 + 1
x+ 1Sol.: 0.
5. limx→∞
10 + x3√x+ 2x
Sol.: 12.
6. limx→∞
3x2 + 74√x8 + x+ 5 + 4x
Sol.: 3.
7. limx→∞
3√x3 + x+ 1
x+ 1Sol.: 1.
8. limx→∞
(x+ 2) (x2 − 5) (x2 + x+ 1)(x4 + 1) (x+ 25)
Sol.: 1.
9. limx→∞
4x + 5x+1
4x + 5xSol.: 5.
10. limx→∞
ax + (a+ 1)x+1
ax + (a+ 1)xdonde a es un número real. ¿El límite existe para todo a ∈ R?.
11. limx→∞
(√x− a−√x
)donde a es un número real.
3.8 Un límite notable
Presentamos a continuación un límite muy importante en Cálculo. La demostración de esteresultado (que puede omitirse sin pérdida de continuidad en el curso) se presenta en el apéndice2.Teorema 3.27
limx→∞
(1 +
1
x
)x= e
Corolario 3.28
limx→0(1 + x)1/x = e
Demostración. Si u = 1/x, entonces: x = 1/u por otra parte si x toma valorespositivos y x→ 0 entonces u→∞, luego:
limx→0(1 + x)1/x = lim
u→∞
(1 +
1
u
)u= e
�
106 CAPÍTULO 3. LÍMITES Y CONTINUIDAD
Corolario 3.29 Para todo a ∈ R
limx→0(1 + ax)1/x = ea
Demostración. Con u = ax, claramente si x→ 0 se tiene u→ 0 luego:
limx→0(1 + ax)1/x = lim
u→0(1 + u)a/u
=(limu→0(1 + u)1/u
)a
= ea
�
Corolario 3.30 Para todo a ∈ R
limx→∞
(1 +
a
x
)x= ea
Demostración. Sea u =1
x, es claro que si x→∞ se tiene u→ 0 por tanto:
limx→∞
(1 +
a
x
)x= lim
u→0(1 + au)1/u
= ea
�
Corolario 3.31
limx→0
ex−1x
= 1
Demostración. Mostraremos que
limx→0
x
ex−1 = 1
haciendo el cambio u = ex−1, encontramos x = ln (1 + u), además notemos quesi x→ 0, entonces u→ 0, por tanto
limx→0
x
ex−1 = limu→0
1
uln (1 + u)
= ln
limu→0(1 + u)
1
u
= ln (e) = 1
eso prueba el teorema.�
3.8. UN LÍMITE NOTABLE 107
Ejercicios resueltosEjercicio 3.34 Mostrar que si b �= 0 :
limx→0
ebx − 1x
= b
Solución. Sea u = bx, entonces si x→ 0 se tiene u→ 0, por tanto
limx→0
ebx − 1x
= b limx→0
eu − 1u
= b
Ejercicio 3.35 Mostrar que
limx→0
ax − 1x
= ln a
Solución. Para la solución usamos el ejercicio previo.
limx→0
ax − 1x
= limx→0
e(ln a)x − 1x
= ln a
Ejercicio 3.36 Calcular limx→∞
(1 +
1
x
)3x.
Solución.
limx→∞
(1 +
1
x
)3x=
[limx→∞
(1 +
1
x
)x]3
= e3
Ejercicio 3.37 Calcular limx→∞
(x+ 5
x− 2
)x+3.
Solución. Se tienex+ 5
x− 2 = 1 +7
x− 2
haciendo u =x− 27
encontramos x + 3 = 7u + 5, además si x tiende a ∞ tabién u tiende a
∞, luego:
limx→∞
(x+ 5
x− 2
)x+3= lim
x→∞
(1 +
7
x− 2
)x+3
= limu→∞
(1 +
1
u
)7u+5
=
[limu→∞
(1 +
1
u
)u]7limu→∞
(1 +
1
u
)5
= e7
Observación. Si bién en cambio de variable facilita el cálculo del límite, a menudo puedeomitirse.
108 CAPÍTULO 3. LÍMITES Y CONTINUIDAD
Ejercicio 3.38 Calcular limx→∞
(x− 1x+ 1
)x.
Solución. Tenemos:x− 1x+ 1
= 1− 2
x+ 1
entonces:
limx→∞
(x− 1x+ 1
)x= lim
x→∞
(1− 2
x+ 1
)x
= limx→∞
[(1 +
−2x+ 1
)x+1]x/(x+1)
=
[
limx→∞
(1 +
−2x+ 1
)x+1] limx→∞
x/(x+1)
= e−2
Observación. Un cambio de variable facilitaria el cálculo del límite. El lector deberá juzgarel uso o no de una nueva variable.
Ejercicio 3.39 Calcular limx→0(cos x)
1
x .
Solución. Escribimos cos x = 1 + (cosx− 1).
limx→0(cosx)
1
x = limx→0[1 + (cosx− 1)]
1
x
= limx→0
(1 + (cosx− 1))1
cosx− 1
cosx− 1x
= limx→0
(1 + (cosx− 1))1
cosx− 1
limx→0
cosx− 1x
= e0 = 1
debe recordarse que limx→0
cosx− 1x
= 0.
Ejercicios propuestosCalcular los siguientes límites:
3.8. UN LÍMITE NOTABLE 109
1. limx→∞
(x2 + x+ 1
x2 − x
)xSol.: e2.
2. limx→0(1 + sinx)
1
x Sol.: e .
3. limx→0(cosx)
1
x2 Sol.: e−1
2 .
4. limx→∞
(cos m
x
)xSol.: 1.
5. limx→π/2
(1 + cos x)3 secx Sol.: e3 .
6. limx→0
a5x − a3xx
Sol.: 2 ln a.
7. limx→∞
(x2
x2 + x− 1
)xSol.: e−1 .
8. limx→∞
(x2 + 3x+ 1
x2 + 2x
)3xSol.: e3.
9. limx→∞
(2x2 + x− 22x2 − x− 1
)7(2x+1)Sol.: e14.
10. limx→∞
(1 +
3x2 + x
x3 − 1
)(x2+x+1)/xSol.: e3.
11. limx→∞
(1 +
2√x3 − 1
) 1
2
√(x2+x+1)(4x−2)
Sol.: e2.
12. limx→∞
(1 +
3√x2 − 4
)− 1
6(x+2)
Sol.: e−1/2.
13. limx→∞
(√x2 − 9 +
√x+ 1√
x2 − 9
)5√x+3Sol.: e5.
14. limx→∞
(x4 + x3 + x2 − 8
x4 + x2
)x2/(2x−4)Sol.: e1/2.
15. limx→∞
(x3 − x2 − 5x+ 16
x3 − 5x
)(x2−√5x)/(x+4)
Sol.: e−1.
16. limx→0(1 + sinx)1/(3x) Sol.: e
1
3
110 CAPÍTULO 3. LÍMITES Y CONTINUIDAD
17. limx→0
(x+ 1− cosx
x
)(3 sinx)/(1−cos x)Sol.: e3.
18. limx→0
(sin x
x
)(sinx cos x)/(sinx−x)Sol.: e.
Para calcular los siguientes límites estudie su forma antes de aplicar los resultados quese obtuvieron en esta sección.
19. limx→0
(sin 4x
−x
)x+2Sol.: 16.
20. limx→∞
(4x− 56x+ 2
)x2Sol.: 0.
21. limx→∞
(1
x2 + 1
) 3x
2x+ 1 Sol.: 0.
Capítulo 4
Cálculo Diferencial
4.1 La Derivada de una función
Sea A un intervalo abierto, f : A→ R. Sea x ∈ A. Definimos el cociente de Newton de f enel punto x como:
f (x+ h)− f (x)h
donde h es positivo o negativo, pero no 0. Gráficamente el cociente de Newton da la pendientede la recta secante que pasa por los puntos (x, f (x)) y (x+ h, f (x+ h)) .
x
yhx+
( )hxf +
( )xf
x
El límite del cociente de Newton cuando h se aproxima a cero, si existe, se llama ”derivadade f en el punto x”, denotamos esto con f ′ (x) y leemos ”f prima de x”. Definimos esto acontinuación.
Definición 4.1 (Derivada) Sea x ∈ Df . La derivada f ′ (x) se define por
f ′ (x) = limh→0
f (x+ h)− f (x)h
siempre que tal límite exista. Si tal límite existe diremos que:
f es derivable en x o f es diferenciable en x.
111
112 CAPÍTULO 4. CÁLCULO DIFERENCIAL
El número f ′ (x) es también llamado ”razón de cambio de f en x.”
Si el límite
limh→0
f (x+ h)− f (x)h
no existe, diremos que f no es derivable en x.
Ejemplo 4.1 Sea f : R → R definida por f (x) = x2 − 2x + 1, el cociente de Newton parax = 3 es:
f (3 + h)− f (3)h
=
[(3 + h)2 − 2 (3 + h) + 1
]− [32 − 2 (3) + 1]
h
=2 (3)h+ h2 − 2h
h
= 2 (3) + h− 2luego:
f ′ (3) =limh→0
f (3 + h)− f (3)h
=limh→0
(2 (3)− 2 + h) = 2 (3)− 2 = 4,por tanto f es diferenciable en x = 3. Se puede probar que en cualquier punto x la derivadaes f ′ (x) = 2x− 2.Ejemplo 4.2 (Derivada de la función constante) Sea f (x) = c, entonces:
f ′ (x) = limh→0
f (x+ h)− f (x)h
= limh→0
c− ch
= limh→0
0
= 0
por tanto la derivada de la función constante es 0.
Ejemplo 4.3 (Derivada de la función valor absoluto) Sea f(x) =| x |. Veremos trescasos.
(a) Si x > 0, en este caso, puesto que h→ 0, podemos suponer que x+ h > 0, entonces:
f ′ (x) = limh→0
f(x+ h)− f(x)h
= limh→0
|x+ h| − |x|h
= limh→0
x+ h− xh
= limh→0
h
h= lim
h→01
= 1
4.1. LA DERIVADA DE UNA FUNCIÓN 113
(b) Si x > 0, en este caso puesto, que h→ 0, podemos suponer que x+ h < 0, entonces:
f ′ (x) = limh→0
f(x+ h)− f(x)h
= limh→0
|x+ h| − |x|h
= limh→0
− (x+ h)− (−x)h
= limh→0
−hh
= limh→0
(−1)= −1
(c) Si x = 0 :f(0 + h)− f(0)
h=| h |h
Observemos que
limh→0+
| h |h= 1 y lim
h→0−| h |h= −1,
luego, el límite limh→0
f(0 + h)− f(0)h
no existe. Por tanto f ′(0) no existe.
x
y
x
y
1−1−
1
1
xy = 0, ≠= xyx
x
Observemos que esta función es continua en cero, pero no tiene derivada en este punto.La derivada de la función valor absoluto se puede expresar como:
f ′ (x) =|x|x, x �= 0.
Teorema 4.2 Si f ′ (p) existe, entonces la función f es continua en x = p.
Observación. Nótese que el recíproco del anterior teorema no necesariamente es cierto,por ejemplo la función valor absoluto es continua en x = 0 pero f ′ (0) no existe, por tanto:Continuidad no implica diferenciabilidad.
114 CAPÍTULO 4. CÁLCULO DIFERENCIAL
4.2 Símbolos para representar la derivada
Dada una función y = f (x), se pueden usar uno los siguientes símbolos para representarf ′ (x):
• Dxf (x) = f ′ (x)
• Df (x) = f ′ (x)
• dy
dx= f ′ (x) , aquí el símbolo
dy
dxno debe mirarse como una fracción, es la derivada de
y = f (x) con respecto a x. No referiremos a esto como la notación diferencial parala derivada.
• df (x)
dx= f ′ (x) .
4.3 Los 10 resultados fundamentales del Cálculo
En cálculo se tienen diez resultados fundamentales, a saber:La derivada de las funciones
xa, a ∈ Rcos (x)sin (x)ex
ln (x)
y las reglas conocidas como:
regla de la sumaregla de la restaregla del productoregla del cocienteregla de la cadena
Con estos diez resultados es posible derivar cualquier función.
4.3.1 Primer resultado fundamental
Sea f(x) = xn con n un entero positivo. Calculamos el cociente de Newton:
f ′ (x) = limh→0
f(x+ h)− f(x)h
= limh→0
(x+ h)n − xnh
= limh→0
(nxn−1 +
n(n− 1)2!
xn−2h+ ...+ hn−1)
= nxn−1
4.3. LOS 10 RESULTADOS FUNDAMENTALES DEL CÁLCULO 115
En notación diferencial con y = xn, tenemosdy
dx= nxn−1 o equivalentemente
d
dx(xn) = nxn−1
Se puede probar que para cualquier a ∈ R
Primer resultado fundamental → d
dx(xa) = axa−1
Debemos notar que los dominios donde la derivada existe dependeran de los valores de a.
Ejemplo 4.4 •(x2)′= 2x
(√x)′=(x1
2
)′=1
2x1−
1
2 =1
2√x, x ∈ (0,∞)
(3√x)′=(x1
3
)′=1
3x1−
1
3 =1
33√x2, x ∈ R−{0}
4.3.2 Segundo resultado fundamental
Sea f (x) = sin x, entonces
f ′ (x) = limh→0
f(x+ h)− f(x)h
= limh→0
sin (x+ h)− sin (x)h
= limh→0
1
h(sinx cos h+ cosx sin h− sin x)
= limh→0
((cosx)
(sin h
h
)− (sin x)
(1− cos h
h
))
= cos x
por tanto:
Segundo resultado fundamental → d
dx(sin x) = cosx
4.3.3 Tercer resultado fundamental
Sea f (x) = cosx, entonces
f ′ (x) = limh→0
f(x+ h)− f(x)h
116 CAPÍTULO 4. CÁLCULO DIFERENCIAL
= limh→0
cos (x+ h)− cos (x)h
= limh→0
1
h(cosx cos h− sinx sin h− cosx)
= limh→0
((− sin x)
(sin h
h
)− (cosx)
(1− cos h
h
))
= − sin x
por tanto:
Tercer resultado fundamental → d
dx(cosx) = − sinx
4.3.4 Cuarto resultado fundamental
Antes de deducir la derivada de la función logaritmo, recordemos que
limu→0
(1 + u)1/u = e
Sea f la función definida en (0,∞) por f(x) = ln x.
f ′ (x) = limh→0
f(x+ h)− f(x)h
= limh→0
ln(x+ h)− lnxh
= limh→0ln
(1 +
h
x
)1h
= limh→0ln
(1 +
h
x
) 1
(h/x)
=1
x
por tanto:
Cuarto resultado fundamental → d
dx(lnx) =
1
x
4.3.5 Quinto resultado fundamental
Recordemos que
limh→0
eh−1h
= 1
Con este resultado encontraremos la derivada de la función exponencial.
4.3. LOS 10 RESULTADOS FUNDAMENTALES DEL CÁLCULO 117
Sea f(x) = ex .
f ′ (x) = limh→0
f (x+ h)− f(x)h
= limh→0
ex+h − exh
= limh→0(ex)
(eh − 1h
)
= ex
Luego:
Quinto resultado fundamental → d
dx(ex) = ex
4.3.6 Sexto a noveno resultados fundamentales
Teorema 4.3 Si f y g son funciones definidas en un intervalo común. En cada punto en
donde f y g son derivables, se tiene que f + g, f − g, f · g yf
gson derivables (para f/g se
requiere que g no sea nulo en el punto en cuestión). Se verifica:
Sexto resultado fundamental → (f + g)′ (x) = f ′ (x) + g′ (x)
Séptimo resultado fundamental → (f − g)′ (x) = f ′ (x)− g′ (x)
Octavo resultado fundamental → (fg)′ (x) = f ′ (x) g (x) + f (x) g′ (x)
Noveno resultado fundamental →(fg
)′(x) =
f ′ (x) g (x)− f (x) g′ (x)(g (x))2
, g (x) �= 0.
Demostración: Se prueban el sexto y noveno resultados.El cociente de Newton para la función f + g en un punto x es
(f + g) (x+ h)− (f + g) (x)h
=f (x+ h) + g (x+ h)− (f (x) + g (x))
h
=f (x+ h)− f (x)
h+g (x+ h)− g (x)
h,
tomando el límite h→ 0:
(f + g)′ (x) = f ′ (x) + g′ (x) .
118 CAPÍTULO 4. CÁLCULO DIFERENCIAL
Para el caso del cociente se tiene(f
g
)(x+ h)−
(f
g
)(x)
h=
f (x+ h)
g (x+ h)− f (x)
g (x)
h
=f (x+ h) g (x)− f (x) g (x+ h)
hg(x+ h)g(x),
sumando y restando f (x) g (x) en el numerador y distribuyendo h encontramos:(f
g
)(x+ h)−
(f
g
)(x)
h=
f (x+ h)− f (x)h
g(x)− f(x)g (x+ h)− g (x)h
g (x+ h) g(x),
tomando el límite h→ 0 se encuentra:(f
g
)′(x) =
f ′ (x) g (x)− f (x) g′ (x)[g (x)]2
.
�
4.3.7 Decimo resultado fundamental (La regla de la cadena)
Teorema 4.4 Sea U (x) = f [g (x)]. Supóngase que g es derivable en x, y que la función fes derivable en g (x), entonces U es derivable en x con derivada:
U ′ (x) = f ′ [g (x)] · g′ (x) .
Demostración. El cociente de Newton es
U (x+ h)− U (x)h
=f [g (x+ h)]− f [g (x)]
h
Sea z = g (x) y k = g (x+ h)− g (x), entonces k depende de h, ademàs k → 0 sih→ 0. Con este cambio el cociente de Newton queda
U (x+ h)− U (x)h
=f (z + k)− f (z)
h
y si k �= 0 podemos escribir
U (x+ h)− U (x)h
=f (z + k)− f (z)
h· kh
Tomando el límite h→ 0, es claro que k → 0, entonces:
limh→0
U (x+ h)− U (x)h
= limk→0
f (z + k)− f (z)h
limh→0
k
h
= f ′ (z) limh→0
g (x+ h)− g (x)h
= f ′ (z) g′ (x)
= f ′ [g (x)] g′ (x) ,
4.3. LOS 10 RESULTADOS FUNDAMENTALES DEL CÁLCULO 119
es decir U ′ (x) = f ′ [g (x)] g′ (x), esto demuestra el teorema.�
Observación. En la anterior demostración, se supone que k �= 0, ¿Que sucede si k = 0?,pues si k = 0 , la anterior demostración no es válida, sin embargo se puede demostrar que elteorema en tal caso subsiste (Para una demostración ver el libro: Cálculo I, de Serge Lang).
En notación diferencial, la regla de la cadena se escribe como
dU
dx=df
dg· dgdx
Observemos que la anterior fórmula nos dice: Derive primero f respecto de g, estoes, mirando g como una variable. Luego derive g respecto a x.
Ejemplo 4.5 Hallar la derivada de U (x) =√x2 + cosx.
Solución. La función U (x) puede escribirse como U (x) = f [g (x)] en donde
f (x) =√x y g (x) = x2 + cos x
derivando encontramos
f ′ (x) =1
2√x
y g′ (x) = 2x− sen x
y entonces
f ′ [g (x)] =1
2√g (x)
=1
2√x2 + cosx
.
Luego por la regla de la cadena
U ′ (x) = f ′ [g (x)] g′ (x) =1
2√x2 + cos x
(2x− sen x) .
Método abreviado. Miramos a x2 + cosx como una variable, entonces la derivada de√x2 + cosx respecto de x2 + cosx es:
1
2√x2 + cosx
. por otra parte la derivada de x2 + cosx
respecto de x es: 2x− sen x, por tanto:
f ′ (x) =1
2√x2 + cosx
(2x− sen x) .
Ejemplo 4.6 g (x) = sen (x2).
120 CAPÍTULO 4. CÁLCULO DIFERENCIAL
Solución. Miramos x2 como una variable, entonces la derivada de sen (x2) respecto de x2
es cos (x2) . Por otra parte la derivada de x2 respecto de x es 2x, luego
f ′ (x) = cos(x2)2x = 2x cos
(x2).
Ejemplo 4.7 h (x) = ecos(√x2+5) .
Solución. Usamos el método abreviado.
h′ (x) =[ecos(
√x2+5)
]′
= ecos(√x2+5) [cos
(√x2 + 5
)]′
= ecos(√x2+5) [− sin
(√x2 + 5
)] [√x2 + 5
]′
= − ecos(√x2+5) sin
(√x2 + 5
) 1
2√x2 + 5
(x2 + 5)′
= − ecos(√x2+5) sin
(√x2 + 5
) 1
2√x2 + 5
(2x)
4.4 Derivadas con funciones trigonométricas
4.4.1 Derivada de la función tangente
Sea f (x) = tan x, entonces f (x) =sen x
cosx. Usando Las propiedades fundamentales encontra-
mos:
f ′ (x) =(senx)′ (cosx)− (senx) (cos x)′
(cosx)2
=(cosx) (cosx)− (sen x) (− senx)
(cosx)2
=cos2 x+ sen2 x
cos2 x
= sec2 x.
.
En notación diferenciald
dx(tan x) = sec2 x
4.4.2 Derivada de la función cotangente
Sea la función f(x) = cotx. Con el procedimiento anterior encontramos que:
f ′(x) = − csc2 x.
4.4. DERIVADAS CON FUNCIONES TRIGONOMÉTRICAS 121
En notación diferenciald
dx(cot x) = − csc2 x
4.4.3 Derivada de la función secante
Sea la función f(x) = secx. Su derivada es:
f ′(x) = secx tanx.
En notación diferenciald
dx(secx) = secx tan x.
4.4.4 Derivada de la función cosecante
La derivada de la función f(x) = cscx es:
f ′ (x) = − cscx cotx.En notación diferencial
d
dx(cscx) = − cscx cotx.
Ejercicio 4.1 f (x) = cosx sen x− x2.Solución.
f ′ (x) = (cosx)′ sen x+ cosx (sen x)′ − (x2)′
= − sen x sen x+ cosx cosx− 2x= − sen2 x+ cos2 x− 2x
Ejercicio 4.2 f (x) =cosx− sen xtan x−√x .
Solución. Escribamos f (x) del siguiente modo f (x) =cosx− sen xtan x− x 1
2
, luego
f ′ (x) =(cosx− sen x)′
(tanx− x 1
2
)− (cosx− sen x)
(tan x− x 1
2
)′
(tanx− x 1
2
)2
=(− sen x− cosx)
(tan x− x 1
2
)− (cosx− sen x)
(sec2 x− 1
2x−
1
2
)
(tan x− x 1
2
)2
122 CAPÍTULO 4. CÁLCULO DIFERENCIAL
Ejercicio 4.3 g (x) = tan2 x+ sen2 x.
Solución. Escribimos g (x) = [tan x]2 + [sen x]2 luego
g′ (x) = 2 [tan x] (tan x)′ + 2 [sen x] (sen x)′
= 2 tan x sec2 x+ 2 senx cosx
= 2 (tanx sec2 x+ sen x cosx) .
Ejercicio 4.4 h (x) = cos x cscx+ 7√x.
Solución.
h′ (x) = (cosx cscx)′ + (7√x)
′
= (cosx)′ cscx+ cosx (cscx)′ + 7 (√x)
′
= − sin x cscx + cosx (− cscx cot x) + 7
2√x
= − sin x cscx − cosx cscx cotx+ 7
2√x
= − sin x cscx − cot2 x+7
2√x
= − csc2 x+ 7
2√x
Observemos que h (x) = cosx cscx+ 7√x = cot x+ 7
√x, luego h′ (x) = − csc2 x+ 7
2√x.
Ejercicio 4.5 Calcular la derivada de f (x) = |cosx|+ |x| |sin x| en el intervalo [−π, π] .Solución. La función f se puede escribir como
f (x) =
{− cosx+ x sin x x ∈ [−π,−π/2) ∪ [π/2, π)cosx+ x sin x x ∈ [−π/2, π/2]
Luego la derivada es:
f (x) =
{sin x+ sin x+ x cosx x ∈ [−π,−π/2) ∪ [π/2, π)− sin x+ sin x+ x cosx x ∈ [−π/2, π/2]
Por tanto:
f ′ (x) = −|cosx|cosx
sin x+|x|x|sin x|+ |x| |sinx|
sinxcosx.
4.4. DERIVADAS CON FUNCIONES TRIGONOMÉTRICAS 123
Ejercicios propuestos
Calcular la derivada de las siguientes funciones:
1. l (x) =1
cos3 xSol.:
3
cos4 xsin x
2. g (x) =x6 + cosx− sin xtanx− x4/7
Sol.:6x5 − sinx− cosxtan x− ( 7√x)4
− x6 + cosx− sin x(tan x− ( 7√x)4
)2
(
sec2 x− 4
7 ( 7√x)3
)
.
3. u (x) = cosx− |x| sin x. Sol.: − sin x− |x|xsin x− |x| cosx
4. s (x) = sin x cos (x (x3 − 5x+ 9))Sol.: cosx cosx (x3 − 5x+ 9)− sin x sin (x (x3 − 5x+ 9)) ·(x3 − 5x+ 9 + x (3x2 − 5)) .
Ejercicio 4.10 Sea a > 0. Calcular la derivada de f (x) = ax.Solución. Nótese que f (x) = ex ln a, por tanto:
f ′ (x) = ex ln a (x ln a)′
= ex ln a ln a
= ax ln a.
126 CAPÍTULO 4. CÁLCULO DIFERENCIAL
Ejercicios propuestos
Calcular la derivada de:
1. f (x) = sin (x2 + tan x) Sol.: (cos (x2 + tanx)) (2x+ sec2 x) .
2. h (x) = cos[5√ln (x4 − x6)
]Sol.: −1
5
sin(ln
1
5 (x4 − x6))
ln4
5 (x4 − x6)4x3 − 6x5x4 − x6 .
3. u (t) = ecos{ln[t2+tan t]}
Sol.:−ecos(ln(t2+tan t)) (sin (ln (t2 + tan t))) 2t+ sec2 t
t2 + tan t.
4. g (x) =
√√√√cosx+ sin x
Sol.:1
16(
16√(cosx+ sin x)
)15 (− sin x+ cos x) .
5. f (x) = cos√x2 + ln (sin (x2 + x)) + arctan x
Sol.: −12
sin√(x2 + ln (sin (x2 + x)) + arctanx)
√(x2 + ln (sin (x2 + x)) + arctan x)
g (x)
donde:
g (x) =
(2x+
(cos(x2 + x
)) 2x+ 1
sin (x2 + x)+
1
x2 + 1
)
6. f (x) = arctan(sin√x1000 + ex
)
Sol.: 12
cos√x1000 + ex√
x1000 + ex1000x999 + ex
1 + sin2√x1000 + ex
.
7. f (x) = cos (cos (cosx))
Sol.: − sin (cos (cosx)) sin (cosx) sin x.
8. f (x) = cos (sin (cosx))
Sol.: sin (sin (cosx)) cos (cosx) sin x.
9. f (x) = sinh(ln x+ tan
(√x+ 1
))
Sol.:(cosh
(ln x+ tan
√x+ 1
))(1x+ 1
2
sec2√x+ 1√
x+ 1
).
10. f (x) =[[cosx+ [ln (x10 + tan x)]
10]10]10
4.6. DERIVADA DE LAS FUNCIONES HIPERBÓLICAS 127
Sol.:u (x) v (x)w (x)
donde:
u (x) = 10
[[cosx+ [ln (x10 + tan x)]
10]10]9
v (x) = 10[cosx+ [ln (x10 + tan x)]
10]9
w (x) =
[− sin x+ 10 [ln (x10 + tanx)]9 10x
9 + sec2 x
x10 + tan x
]
4.6 Derivada de las funciones hiperbólicas
Recordemos que
senh x = 12(ex − e−x) cosh x = 1
2(ex + e−x) tanh x =
senh x
cosh x
csch x =1
senh xsech x =
1
cosh xcoth x =
1
tanh x
Con éstas fórmulas es fácil deducir:
(senh x)′ = cosh x(cosh x)′ = senh x(tanhx)′ = sech2 x(coth x)′ = − csch2 x(sech x)′ = − tanh x sech x(csch x)′ = − coth x cschx
4.7 Derivada de la función inversa
Sea f una función biyectiva en algún dominio. Sea g la función inversa de f , y :f ′ [g (x)] �= 0entonces:
f [g (x)] = x
yf ′ [g (x)] · g′ (x) = 1,
luego:
g′ (x) =1
f ′ [g (x)],
es decir,
(f −1)′(x) =
1
f ′ [g (x)] .
Una aplicación del anterior proceso se presenta en la siguiente sección.
128 CAPÍTULO 4. CÁLCULO DIFERENCIAL
4.7.1 Derivadas de funciones trigonométricas inversas
• a) Derivada de la función arcsen xSea f (x) = arcsen x. Por definición se tiene sen (f (x)) = x, derivando a ambos ladosobtenemos
cos (f (x)) f ′ (x) = 1,
de donde:
f ′ (x) =1
cos (f (x))
=1
√1− sen2 (f (x))
=1√1− x2
es decir,
d
dx(arcsen x) =
1√1− x2
De manera similar encontramos las siguientes derivadas:
• b)
d
dx(arccosx) = − 1√
1− x2
• c)
d
dx(arctanx) =
1
1 + x2
• d)
d
dx(arccotx) = − 1
1 + x2
• e)
d
dx(arcsecx) = ± 1
x√x2 − 1
{+ si x > 1− si x < −1
• f)
d
dx(arccscx) = ∓ 1
x√x2 − 1
{− si x > 1+ si x < −1
4.8. TABLA GENERALIZADA DE DERIVADAS CON NOTACIÓN DIFERENCIAL 129
4.7.2 Derivadas de las funciones hiperbólicas inversas
Recordemos las formulas trigonométricas hiperbólicas inversas.
senh−1 x = ln(x+
√x2 + 1
), x ∈ R
cosh−1 x = ln(x+
√x2 − 1
), x ≥ 1
tanh−1 x = 12ln(1+x1−x), |x| < 1
coth−1 x = 12ln(x+1x−1), |x| > 1
sech−1 x = ln(1+√1−x2x
), 0 < x ≤ 1
csch−1 x = ln(1x+ 1
|x|√x2 + 1
), x �= 0
Derivando obtenemos las siguientes fórmulas:
d
dx
(senh−1 x
)=
1√1 + x2
d
dx
(cosh−1 x
)=
1√x2 − 1
d
dx
(tanh−1 x
)=
1
1− x2 , |x| < 1d
dx
(coth−1 x
)=
1
1− x2 , |x| > 1d
dx
(sech−1 x
)= − 1
x√1− x2
d
dx
(csch−1 x
)= − 1
x√1 + x2
Obsérvese que la derivada de tanh−1 x es una expresión igual a la derivada de coth−1 x,la diferencia está en sus dominios, pues la primera tiene validez en |x| < 1 y la segunda en|x| > 1.
4.8 Tabla generalizada de derivadas con notación dife-rencial
Usando la regla de la cadena podemos construir la siguiente tabla, en cada caso u es unafunción de la variable x, esto es, u = u (x).
Función Derivada
ua aua−1du
dx, para todo a ∈ R
eu eudu
dx
ln u1
u
du
dx
130 CAPÍTULO 4. CÁLCULO DIFERENCIAL
Función Derivada
sin u cos udu
dx
cosu − sin u dudx
tan u sec2 udu
dx
cotu − csc2 u dudx
secu secu tanudu
dx
cscu − cscu cot u dudx
Función Derivada
arcsen u1√1− u2
du
dx
arccosu − 1√1− u2
du
dx
arctanu1
1 + u2du
dx
arccot u − 1
1 + u2du
dx
arcsecu ± 1
u√u2 − 1
du
dx
{+ si u > 1− si u < −1
arccscu ∓ 1
u√u2 − 1
du
dx
{− si u > 1+ si u < −1
Función Derivada
(senh u)′ coshudu
dx
(cosh u)′ senh udu
dx
(tanh u)′ sech2 udu
dx
(coth u)′ − csch2 u dudx
(sech u)′ − tanh u sech u dudx
(csch u)′ − coth x csch u dudx
4.8. TABLA GENERALIZADA DE DERIVADAS CON NOTACIÓN DIFERENCIAL 131
Función Derivada
senh−1 u1√1 + u2
du
dx
cosh−1 u1√
u2 − 1du
dx
tanh−1 u1
1− u2du
dx, |u| < 1
coth−1 u1
1− u2du
dx, |u| > 1
sech−1 u − 1
u√1− u2
du
dx
csch−1 u − 1
u√1 + u2
du
dx
Ejercicios propuestos
Comprobar los siguientes resultados
1.d
dx(arcsin (arctan (x2 + 1))) =
2√(1− arctan2 (x2 + 1))
x
1 + (x2 + 1)2.
2.d
dx(ln (arccos (
√x))) = − 1
2√(1− x)√x arccos√x
.
3.d
dx
(√arcsec (tan x)
)=
1
2√arcsec (tan x)
sec2 x
tan x√tan2 x− 1
.
4.d
dx
(earctan(x
5−5x))=
5x4 − 51 + (x5 − 5x)2
earctan(x5−5x) .
5.d
dt
(√arccsc (ln (t2 − 3t))
)= u (t), donde
u (t) = − 1
2√arccsc (ln (t2 − 3t))
2t− 3(t2 − 3t) (ln (t2 − 3t))
√ln2 (t2 − 3t)− 1
.
6.d
dt(tarccot t) = tarccot t
(− 11+t2
ln t+arccot t
t
).
7.d
dt
(t√arcsec(t2+1)
)= u (t), donde
u (t) = t√arcsec(1+t2) ·
t
(1 + t2)√arcsec (1 + t2)
√(1 + t2)2 − 1
ln t+
√arcsec (1 + t2)
t
132 CAPÍTULO 4. CÁLCULO DIFERENCIAL
8.d
dx(sin (arcsec
√x)) = cos (arcsec
√x)
1
2x√x− 1 .
9.d
dx(sinh (arcsec
√x)) =
cosh (arcsec√x)
2x√x− 1
10.d
dx
(sinh−1 (cosx+ tan (x2 + 1))
)=
− sin x+ 2 (sec2 (x2 + 1))x√(1 + (cosx+ tan (x2 + 1))2
) .
4.9 Derivadas de Orden Superior
Si una función f es derivable en x, y su derivada f ′ es derivable en x, la derivada de f ′ sellama segunda derivada de f en x y se escribe con una de las siguientes notaciones:
f ′′ (x) ó f (2) (x) ód2f
dx2
Se puede hablar en general de una derivada n-ésima, esto, se denota con una de las siguientesnotaciónes
f (n) (x) ódnf
dxn
Debemos observar que en general para un entero positivo k se tiene:
d
dx
(dkf
dxk
)=dk+1f
dxk+1
También (f (k) (x)
)′= f (k+1) (x)
Ejercicios resueltos
Ejercicio 4.11 Sea f (x) =1
x, encontrar todas las derivadas de f .
f ′ (x) = − 1x2,
f ′′ (x) =1 · 2x3
,
f ′′′ (x) = f (3) = −1 · 2 · 3x4
· · ·De lo anterior, inductivamente se puede probar que
f (n) (x) = (−1)n n!
xn+1
4.9. DERIVADAS DE ORDEN SUPERIOR 133
Ejercicio 4.12 Sea la función f (x) = u [v (x)], encontrard2f
dx2.
Solución. Comodf
dx=du
dv
dv
dx, entonces
d2f
dx2=
d
dx
(df
dx
)
=d
dx
(du
dv
dv
dx
)
=d
dx
(du
dv
)dv
dx+du
dv
d
dx
(dv
dx
)
=d
dv
(du
dv
)dv
dx
dv
dx+du
dv
(d2v
dx2
)
=
(d2u
dv2
)(dv
dx
)2+
(du
dv
)(d2v
dx2
)
Otro método: f (x) = u [v (x)], entonces f ′ (x) = u′ [v (x)] v′ (x), luego
Ejercicio 4.13 Sea f (x) = cos [x2 + 1], encontrar f ′′ (x).
Solución. f ′ (x) = − sen (x2 + 1) (2x), entonces
f ′′ (x) = [− sen (x2 + 1)]′ (2x) + [− sen (x2 + 1)] (2x)′
= [− cos (x2 + 1) (2x)] (2x)− sen (x2 + 1) 2= −4x2 cos (x2 + 1)− 2 sen (x2 + 1)
Ejercicio 4.14 Sea g (x) = xx, encontrar g′′ (x).
Solución. ln g (x) = x ln x, derivandog′ (x)
g (x)= lnx+ 1, de donde:
g′ (x) = xx (ln x+ 1)
derivando nuevamente:
g′′ (x) = (xx)′ (ln x+ 1) + xx (ln x+ 1)′
= xx (ln x+ 1) (lnx+ 1) + xx(1x
)
= xx (ln x+ 1)2 +xx
x
134 CAPÍTULO 4. CÁLCULO DIFERENCIAL
Ejercicio 4.15 Encontrar un polinomio P de segundo grado tal que P (1) = 1, P ′ (1) = 3 yP ′′ (1) = 4.Solución. Sea
P (x) = ax2 + bx+ c,
se tiene P ′ (x) = 2ax+ b y P ′′ (x) = 2a.Usando las condiciónes del problema, formamos el siguiente sistema de ecuaciónes
a+ b+ c = 12a+ b = 32a = 4
,
resolviendo, encontramos a = 2, b = −1, c = 0, luego, el polinomio buscado es:
P (x) = 2x2 − x.Ejercicio 4.16 Sea Y = u (x) v (x), encontrar:
(a) Y ′′
(b) Y (n)
Solución. Por comodidad escribiremos simplemente u y v en lugar de u (x) y v (x) .(a)
Y ′ = u′ v + u v′,
entoncesY ′′ = u′′v + u′v′ + u′v′ + uv′′
= u′′v + 2u′v′ + uv′′
(b) Por inducción, se puede probar que
Y (n) =n∑
k=0
(n
k
)u(n−k)v(k),
aqui(n
k
)=
n!
k! (n− k)! y convenimos que u(0) = u, también v(0) = v, esto es, la derivada de
orden cero de una función es la misma función.
Ejercicio 4.17 Calcular la n-ésima derivada de f (x) = cosx+ sen x.
Solución.f ′ (x) = − senx+ cosxf ′′ (x) = − cosx− sen xf ′′′ (x) = + sen x− cosxf (iv) (x) = cosx+ sen x,
de esto podemos deducir:
f (n) (x) =
{(−1)n2 cosx+ (−1)n2 sen x; para n par
(−1)n+12 senx+ (−1)n+32 cosx; para n impar
4.10. DERIVACIÓN IMPLÍCITA 135
Ejercicios propuestos
1. Calcular f (n) (x) . si:
(a) f (x) = eax, siendo a una constante.
Sol.: aneax.
(b) f (x) = bax, siendo a, b constantes con b > 0.
(c) f (x) = cosx
Sol.:
(−1)n+12 sin x, n impar
(−1)n2 cosx, n par
(d) f (x) = sin x
(e) f (x) = ln (x)
(f) f (x) = ln (x+ 1)
2. Sea f (x) = aex + bx2 + cx, encontrar los valores de a, b y c si se sabe que f (0) = 1 yf ′ (0) = 2, f ′′ (0) = 3.
Sol.:a = 1, b = 1, c = 1.
4.10 Derivación Implícita
Consideremos la ecuación algebraica F (x, y) = c, bajo ciertas condiciónes, la anterior expre-sión, define una función y = f (x). En esta sección, discutiremos la forma de encontrar
y′ (x) =df (x)
dx
a partir deF (x, y) = c,
sin necesidad de despejar y de la mencionada ecuación.
Ejemplo 4.8 La ecuación x2 + y2 = 1 define, entre otras, las siguientes funciones:
f (x) =√1− x2
yg (x) = −
√1− x2
4.10.1 Cálculo de y ′
Para encontrar y′ a partir de F (x, y) = c usamos la regla de la cadena. En particularrecordemos que si y = y (x) y u = H(y) entonces por la regla de la cadena
du
dx=du
dy
dy
dx
136 CAPÍTULO 4. CÁLCULO DIFERENCIAL
Ejercicios resueltos
Ejercicio 4.18 Encontrar y′ =dy
dx, si x2 + y2 = 1.
Solución. Observemos que:d
dx(x2) = 2x
d
dx(y2) = 2yy′
d
dx(1) = 0,
por tanto la derivada a ambos lasos de
x2 + y2 = 1
da:2x+ 2yy′ = 0.
Despejando y′, obtenemos
y′ = −xy.
Nótese que y′ no existe en los puntos (1, 0) y (−1, 0).
Ejercicio 4.19 Encontrar y′ si 2x2√y − y2 = 5.
Solución. Derivando respecto a x en ambos lados de la igualdad dada obtenemos :
Suponer que las siguientes ecuaciones definen implícitamente una función y = f (x) . Hallarsu derivada.
1. xy3 + cos y = 1
Sol.:y′ = − y3
3xy2 − sin y .
2. xy + 5√ln yx3 = 5
Sol.: y′ = −y + 15
(ln
1
2 y)x2
x+5
2 ln1
2 y
x3
y
.
3. xy2 − arctan(
1√x2 + y2
)
+ sin (xy) = 0
Sol. : y′ = −y2 +
1√x2 + y2 (x2 + y2 + 1)
x+ (cosxy) y
2xy +1
√x2 + y2 (x2 + y2 + 1)
y + (cosxy)x.
4. xg (y) + yf (x) = 0;
Sol.: y′ = −g (y) + yf′ (x)
xg′ (y) + f (x).
138 CAPÍTULO 4. CÁLCULO DIFERENCIAL
5. sin (xy) + sin (x2y2) = 0
Sol : y′ = −(cosxy) y + 2 (cosx2y2)xy2
(cosxy)x+ 2 (cos x2y2) x2y.
6. arcsec(y + exy) = 0.
Sol : −y exy
1 + xexy.
7. (xy + yx) = 1.
Sol :− xy yx+ yx ln y
xy lnx+ yxx
y
8. cos (xy)− sin (xy) = 5.
Sol :− (sin xy) y + (cosxy) y(sinxy) x+ (cosxy)x
9. sin(exy
2
)+ tan (y + x) = 0.
Sol :−
(cos(exy
2
))y2exy
2
+ sec2 (y + x)
2 (cos (exy2))xyexy2 + sec2 (y + x)
10.arcsin (xy)
x2y2 − cos (xy) = 1.
Sol :−y(x2y2−cos(xy))√
1−x2y2+ (2xy2 + y sin (xy)) arcsin (xy)
x(x2y2−cos(xy))√1−x2y2
− (2x2y + x sin (xy)) arcsin (xy)
4.11 La recta tangente y normal
Sea f una función diferenciable en x0. La recta tangente a la gráfica de f en el punto(x0, f (x0)) es la recta que pasa por este punto con pendiente f ′ (x0) , esto es,
y = f ′ (x0) (x− x0) + f (x0)
es la ecuación de la recta tangente a la gráfica de f en (x0, f (x0)) .
4.11. LA RECTA TANGENTE Y NORMAL 139
x
yRecta tangente
Recta normal( )( )00, xfx
0x
( )0xf
Por otra parte es claro que la recta normal al gráfico de f en (x0, f (x0)) es:
y = − 1
f ′ (x0)(x− x0) + f (x0) .
Ejercicios resueltos
Ejercicio 4.22 Sea f la función definida por f (x) = −x2 + 2x, determinaremos la ecuaciónde la recta tangente y normal a la gráfica de f en x = 3
2. Calculando f ′(x) encontramos:
f ′(x) = −2x+ 2,
entonces f ′(32
)= −1, por otra parte f
(32
)= −9
4+ 3 = 3
4luego la ecuación de la recta
tangente a la gráfica de f en(32, f(32
))=(32, 34
)es:
y = f ′(32
) (x− 3
2
)+ f(32
)
= −1(x− 3
2
)+(34
)
= −x+ 94
por otra parte la recta normal tiene por ecuación:
y = 1
(x− 3
2
)+3
4
= x− 34
140 CAPÍTULO 4. CÁLCULO DIFERENCIAL
x
y
0
( )43
23,1
21
49+−= xy
43−= xy
xxy 22 +−=
Recta normal
Recta tangente
Ejercicio 4.23 Encuentre las ecuaciones de la recta tangente y normal a la gráfica de f (x) =sin x en el punto
(π/3,
√3/2).
Solución. f ′ (x) = cosx, luego la pendiente de la recta tangente en el puntodado es:
mT = f ′ (π/3) =1
2
por tanto la ecuación de la recta tangente es:
y =1
2(x− π/3) +
√3/2
=1
2x− 1
6π +
1
2
√3
Por otra parte la pendiente de la recta normal es mN = − 1
mT
= −2, luego la
ecuación de la recta normal es:
y = −2 (x− π/3) +√3/2
= −2x+ 23π +
1
2
√3
x
y
π
π
( )23,
3π
0
( )xy sin=
3221
32 ++−= πxy
321
61
21 ++= πxy
4.11. LA RECTA TANGENTE Y NORMAL 141
Ejercicio 4.24 Sea f (x) = 15x5 + 1
2x4 − 14
3x3 + x2 − 15x. Encontrar los puntos de la gráfica
de f en donde la tangente es horizontal.
Solución. Derivando y factorizando:
f ′ (x) = (x− 3)(x2 + 1
)(x+ 5)
Los puntos en donde la derivada es nula son x = 3 y x = −5. Por tanto los puntosen donde la tangente es horizontal son:
(3,−729
10
)y(−5, 2225
6
).
x
y
35
−
62225,5
50−
200
400
0
−
10729,3
( ) xxxxxxf 15233
144215
51 −+−+=
Ejercicio 4.25 Hallar las ecuaciones de las tangentes a la curva 9x2 + 16y2 = 52 paralelas ala recta 9x− 8y = 1.
Solución. La pendiente de la recta es: m =9
8. Por otra parte de 9x2+16y2 = 52
se obtiene 9x+ 16yy′ = 0 de donde:
y′ = − 9x16y
(1)
Puesto que la pendiente debe ser 9/8 se tiene: − 9x16y
=9
8lo que da:
−x = 2y. (2)
Multiplicando por 2 a ambos lados de (2) y elevando al cuadrado:
4x2 = 16y2,
este resultado junto a 9x2 + 16y2 = 52 da:
4x2 = 52− 9x2
142 CAPÍTULO 4. CÁLCULO DIFERENCIAL
resolviendo la ecuación se obtiene: x = −2 y x = 2. Reemplazando estos valoresen (2):
x = −2 : y = 1
x = 2 : y = −1
Por tanto las rectas tangentes buscadas son:
• Por el punto (−2, 1) : y = 9x+ 268
• Por el punto (2,−1) : y = 9x− 268
x
y
( )1,2 −
( )1,2−
3−
2−
3
2
52169 22 =+ yx2698 −=− xy
2698 =− xy 189 =− yx
Ejercicios propuestos
1. Encuentre las ecuaciones de la recta tangente y normal a la gráfica de la función en elpunto indicado:
(a) f (x) = arctan x en x = 1. Sol. y =1
2(x− 1) + π
4, y = −2 (x− 1) + π
4
(b) f (x) = (x3 + 2)5 en (−1, 1) .
2. Hallar las rectas tangentes de pendiente 1 a la circunferencia
x2 + y2 − 10x+ 2y + 18 = 0.
Sol.: y = x− 10, y = x− 2.
3. Sea f (x) =1
3x3 − x + 1. Encontrar los puntos x en donde la pendiente de la recta
tangente a la gráfica de f sea (a) 1, (b) −1. Sol.: (a) ±√2 (b) 0
4.12. LA DIFERENCIAL 143
4. Sea f (x) = x2 + ax+ b. Encontrar todos los valores de a y b tales que la línea y = 2xes tangente a la gráfica de f en (2, 4) . Sol.: a = −2, b = 4
5. Encontrar valores de a, b, c para que los gráficos de los polinomios f (x) = x2+ ax+ b yg (x) = x3 − c que se intersectan en (1, 2) tengan la misma tangente en tal punto. Sol.:a = 1, b = 0, c = −1.
6. Demostrar que la ecuación de la tangente a la parábola y2 = 4px en un punto (x0, y0)de ella es yy0 = 2p (x+ x0)
7. Demostrar que las ecuaciones de las tangentes a la elipse b2x2+a2y2 = a2b2 de pendienteigual a m, son y = mx±
√a2m2 + b2.
8. Dada la hipérbola b2x2 − a2y2 = a2b2, demostrar que (a) la ecuación de la tangente enun punto (x0, y0) de ella es b2x0x−a2y0y = a2b2. (b) las ecuaciones de las tangentes conpendiente m son y = mx±
√a2m2 − b2.
4.12 La diferencial
4.12.1 Incrementos
Si una variable cambia de valor de x0 a x, la diferencia x−x0 se llama incremento de la variabley se denota con∆x. Si y = f (x) y hay un cambio de x0 a x, la diferencia f (x)−f (x0) se llamaincremento en la variable dependiente y, tal incremento se denota por: ∆y. Resumiendo:
∆x = x− x0∆y = f (x)− f (x0) = f (x0 +∆x)− f (x0)
Dependiento de la ubicación de x0 y y0 = f (x0) los incrementos pueden ser positivos onegativos. A continuación se presenta una ilustración.
x
y
( )00, yx
( )yx,
y∆
x∆x0x
Observemos que
lim∆x→0
∆y
∆x= lim
x→x0
f (x)− f (x0)x− x0
144 CAPÍTULO 4. CÁLCULO DIFERENCIAL
= lim∆x→0
f (x0 +∆x)− f (x0)∆x
= f ′ (x0)
4.12.2 Diferenciales
Considérese una función y = f (x) y x0 un punto del dominio en donde f ′ (x0) existe, entoncesen una vecindad pequeña de x0, la recta tangente a f en (x0, f (x0)) cuya ecuación es:
g (x)− f (x0) = f ′ (x0) (x− x0)
se aproxima ”bién ” a f . Con ∆x = x− x0, podemos formemos la aplicación
T (∆x) = f ′ (x0)∆x
tal aplicación se llama la diferencial de y, por abuso de lenguaje es usual escribir dx en lugarde ∆x.
Definición 4.5 (Diferencial) Dada una función y = f (x) la diferencial de y en un punto xes:
dy = f ′ (x) dx.
La diferencial de la variable dependiente y no es igual a su incremento. Considérese porejemplo la función y = f (x) = x2, como f ′ (x) = 2x, debemos tener:
dy = f ′ (x) dx
pero
∆y = f (x+∆x)− f (x)= (x+∆x)2 − x2= 2x∆x+ (∆x)2
= 2x dx+ (dx)2
obsérvese, sin embargo, que si dx está próximo de cero la diferencial ∆y y dy estarán muypróximos.
4.12.3 La notación diferencial para la derivada
Con la discusión de las dos secciones anteriores se justifica la notación:
dy
dx= f ′ (x) ,
como sabemos esto se lee ”la derivada de y = f (x) respecto de x es f ′ (x)”. La notación
dy = f ′ (x) dx podría sugerir que se ha despejado dy de la ecuacióndy
dx= f ′ (x), esto, si bién
funciona, no es cierto puesdy
dxno es una fracción.
4.12. LA DIFERENCIAL 145
4.12.4 Reglas para el cálculo de las diferenciales
Todas las regla de derivadas se cumplen para diferenciales.
1. d (c) = 0, c una constante
2. d (cu) = cdu
3. d (uv) = u dv + v du
4. d (u/v) =v du− u dv
v2
Ejemplo 4.9 La diferencial de y = cosx2 es:
dy =(cosx2
)′dx = −2x sin x2dx.
Ejemplo 4.10 La diferencial de y = tan x es
dy = (tanx)′ dx = sec2 x dx.
146 CAPÍTULO 4. CÁLCULO DIFERENCIAL
Capítulo 5
Aplicaciones de la Derivada (enprueba)
5.1 Máximos y Mínimos
5.1.1 Introducción
La idea central que más se explotará en este capítulo, es la interpretación geométrica de laderivada. Geométricamente si f ′(x0) = 0 para algún x0 ∈ Df , la recta tangente que pasa por(x0, f(x0)) es paralela al eje de las absisas. En la siguiente gráfica f ′ (c1) = 0 y f ′ (c2) = 0.
x
y
1c
2c
( )( )11, cfc
( )( )22, cfc
Si f ′(c) =∞ (o −∞) la recta tangente es paralela al eje de las ordenadas. En la ilustraciónque sigue f ′ (c) =∞.
x
( ) ∞=cf '
c
y
147
148 CAPÍTULO 5. APLICACIONES DE LA DERIVADA (EN PRUEBA)
Para fijar mejor las ideas, en esta sección se dan algunas definiciones y presentan algunosteoremas preliminares que serán importantes para las próximas secciones.
Definición 5.1 (Máximo y Mínimo)
• Sea S ⊂ R y f : S → R. Si existe x1 ∈ S tal que f(x1) ≥ f(x) para todo x ∈ S, diremosque f(x1) es el máximo de f en S.
• Si existe x0 ∈ S tal que f(x0) ≤ f(x) para todo x ∈ S, diremos que f(x0) es el mínimode f en S.Observemos que f (x0) es una cota inferior y f (x1) es una cota superior de la funciònf en el dominio S.
Definición 5.2 (Máximo y Mínimo Local). Sea S ⊂ R y f : S → R una función.
• f tiene un máximo local en un punto c ∈ S si existe un intervalo abierto G tal que f(c)es un máximo de f en S ∩G.
• f tiene un mínimo local en un punto c ∈ S si existe un intervalo abierto G tal que f(c)es un mínimo de f en S ∩G.
y
b xa
5c
4c3c
2c1c
p
Sea S = [a, b], f : S → R cuya gráfica se muestra arriba. Entonces se tiene:
• (a) en x = a : máximo =f(a), en tal punto se tiene también un máximo local
• (b) en x = c1 : mínimo local =f(c1)
• (c) en x = c2 : máximo local= f(c2)
• (d) en x = c3 : mínimo =f(c3), en dicho punto se tiene también un mínimo local
• (e) en x = p no se tiene ni máximo ni mínimo local.
• (f) en x = c4 : máximo local =f(c4)
5.1. MÁXIMOS Y MÍNIMOS 149
• (g) en x = c5 : mínimo local = f(c5),
• (h) en x = b : máximo local =f(b)
Los máximos o mínimos pueden no existir, considérese por ejemplo f : [−1, 1]− {0} → R
definida por f(x) =1
x2no posee un máximo, aunque si tiene mínimo local en x = −1 y x = 1.
x
y
100
1− 10
60
20
( )2
1
xxf =
El siguiente teorema da las condiciones bajo las cuales una función siempre tiene unmáximo y un mínimo.
Teorema 5.3 Sea f : [a, b]→ R una función continua. Entonces existen puntos x0,x1 ∈ [a, b]tales que f (x0) es el mínimo de f en [a, b] y f (x1) es el máximo de f en [a, b].
Teorema 5.4 Sea f : (a, b) → R, sea c ∈ (a, b). Supóngase que f ′(c) existe y f(c) es elmáximo o mínimo local de f en (a, b), entonces f ′(c) = 0.
Demostración: Supongamos que f(c) es el mínimo de f en (a, b), la demostraciónpara el caso de que f(c) sea un máximo es análoga.
c
( )cf
hc+ hc+
y
x
( )hcf +
( )hcf +
0<h 0>h
a b
Es claro que para cualquier h (positivo o negativo suficientemente cerca de cero)se tiene f(c + h) ≥ f(c), luegoSi h > 0
limh→0+
=f(c+ h)− f(c)
h≥ 0.
150 CAPÍTULO 5. APLICACIONES DE LA DERIVADA (EN PRUEBA)
Si h < 0
limh→0−
=f(c + h)− f(c)
h≤ 0.
Pero por hipótesis f ′(c) existe, esto es,
limh→0+
f(c+ h)− f(c)h
= limh→0−
f(c+ h)− f(c)h
Por tanto necesariamente f ′(c) = 0.�
Comentarios
• (1) El recíproco del Teorema no es necesariamente válido, esto es, si f ′(c) = 0 paraalgún c ∈ (a, b) no necesariamente f(c) es un máximo o mínimo local de f en (a, b).Por ejemplo la función f : (0, 2) → R definido por f(x) = (x − 1)3, tiene derivadaf ′(x) = 3(x − 1)2 y f ′(1) = 0 sin embargo f(1) no es máximo ni el mínimo local de fen (0, 2).
x
y
1
1
20
1−
( ) ( )31−= xxf
• (2) Una hipótesis importante es la suposición c ∈ (a, b), esto es, c no puede ser ni a ni b.Si c tomara uno de los valores extremos del intervalo [a, b] el teorema no necesariamentees cierto. Por ejemplo f : [0, 2]→ R definida por f(x) = x2 − 3x+ 2 tiene un máximolocal en x = 0, pero f ′ (x) = 2x− 3 y f ′(0) = −3 �= 0.
x
y
1
2
20
( ) 232 +−= xxxf
5.1. MÁXIMOS Y MÍNIMOS 151
• (3) La contrarrecíproca del teorema se expresa de la siguiente manera. Si f ′(c) �= 0entonces en c ∈ (a, b) f no puede tener un máximo o mínimo.
La observación (3) es la clave para futura discusión, pues si estamos interesadosen encontrar los máximos y mínimos locales de una función (en el interior de sudominio), debemos buscarlos en el conjunto:
{x : f ′(x) = 0} ,
claramente esto es una grán ventaja.
abierto fD
( ){ }0': =xfx
( ){ }0': ≠xfx
De existir máximos o mínimos locales deben encontrarse en este subconjunto del dominio
Aquí no pueden encontrarseni máximos ni mínimos locales
5.1.2 Puntos críticos
Definición 5.5 Los puntos críticos de una función son:
• (a) Los extremos del intervalo donde está definida la función, si estas existen.
• (b) Los valores x tales que f ′(x) = 0.
• (c) Los valores donde f ′ no está definida.
Ejemplo 5.1 Consideremos la función f : [−3, 5)→ R definido por f (x) = x2 − 4x.Derivando: f ′ (x) = 2x − 4. Resolviendo f ′ (x) = 0 obtenemos x = 2, por tanto los puntoscríticos de f son:
x = −3 (Extremo del intervalo donde se define la función)x = 2 (Sol de f ′ (x) = 0).
5.1.3 Funciones crecientes, decrecientes y derivada
La siguiente proposición muestra la relación que existe entre funciones crecientes y decre-cientes con la derivada.
Proposición 5.6 Sea S un intervalo, f : S → R una función diferenciable en S. Entonces:
152 CAPÍTULO 5. APLICACIONES DE LA DERIVADA (EN PRUEBA)
1. Si f es creciente (estrictamente creciente) en S, entonces f ′(x) ≥ 0 (f ′(x) > 0) paratoda x ∈ S en donde f ′(x) existe.
2. Si f es decreciente (estrictamente decreciente) en S, entonces f ′(x) ≤ 0 (f ′(x) < 0)para toda x ∈ S en donde existe f ′(x).
Demostración. Supongamos que f es creciente en S. Sea x ∈ S, por hipótesisf ′(x) existe. Por definición
f ′(x) =limh→0
f(x+ h)− f(x)h
,
puesto que f ′(x) existe, los límites laterales del cociente de Newton cuando h→ 0+
y h→ 0− existen y son iguales a f ′ (x), luego podemos escribir:
f ′(x) = limh→0+
f(x+ h)− f(x)h
,
puesto que h > 0, x < x + h, entonces usando la hipótesis de que f es creciente
tenemos f(x) ≤ f(x + h) luegof(x+ h)− f(x)
h≥ 0 , para toda h > 0, esto
muestra que:
f ′(x) = limh→0+
f(x+ h)− f(x)h
≥ 0
esto prueba la primera parte. La demostración de la segunda parte es similar.
�
Comentario
La recíproca de la anterior proposición es cierta, esto es, si f ′ (x) ≥ 0 en algún dominio S,la función es creciente en dicho dominio. Si f ′ (x) > 0, la función es esctrictamente crecienteen el dominio S. Similarmente Si f ′ (x) ≤ 0 en algún dominio S, la función es decreciente, sif ′ (x) < 0, la función es esctrictamente decreciente en el dominio S.
Ejercicios resueltos
Ejercicio 5.1 • (a) Determinar si f (x) = 2x+ sinx es creciente, decreciente o no tieneninguna de estas propiedades.
• (b) ¿Puede f tener más de una raíz?.
Solución.
5.1. MÁXIMOS Y MÍNIMOS 153
• (a)Derivando obtenemosf ′ (x) = 2 + cosx
como sabemos, para cualquier número x, cos x es un número que pertenece al intervalo[−1, 1] , eso nos permite concluir que f ′ (x) = 2 + cosx es siempre un número positivo,esto es, f ′ (x) > 0, es decir, la función f es estrictamente creciente en toda la recta realR.
�
�X
Y
-4 -2 0 2 4
8642
-2-4-6-8
• (b)Una raíz es 0 pues f (0) = 0, x = 0, debe ser la única raíz ya que la función esestrictamente creciente (véase el gráfico).
Ejercicio 5.2 Sea f (x) = x− sin x, muestre que(a) sin x ≤ x para x ∈ [0,∞) .(b) x ≤ sinx para x ∈ (−∞, 0] .Solución. Tenemos f ′ (x) = 1− cosx, además cosx ∈ [−1, 1] para cualquier número x, estomuestra que f ′ (x) = 1 − cosx ≥ 0, es decir, f es creciente en (−∞,∞) . Por otra partef (0) = 0, luego:
• (a) Si x ≥ 0, tenemos f (x) ≥ 0, esto es, x− sin x ≥ 0 de donde
sin x ≤ x
• (b) Se muestra como en (a)
Ejercicios propuestos1. (a) Demuestre que la ecuación 5x− 4 cosx = 0 tiene exactamente una solución.
(b) Halle el intervalo específico que contenga la solución.
2. Si f (x) = x3 + 3x+ k, muestre que f (x) = 0 tiene exactamente una solución real paracualquier valor de k.
3. Sea f (x) = x2 + cosx.
154 CAPÍTULO 5. APLICACIONES DE LA DERIVADA (EN PRUEBA)
(a) Mostrar que f es decreciente en (−∞, 0] y creciente en [0,∞] .(b) Calcular los números x tales que f ′ (x) = 0.
(c) Puede tener raices la función f?.
(d) Bosquejar la gráfica.
4. Sea f (x) = 14x4 − 1
3x3 − 3x2.
(a) Hallar números x tales que f ′ (x) = 0.
(b) Hallar los intervalos de crecimiento y decrecimiento.
(c) Bosquejar la gráfica de la función.
5. Calcular los intervalos de crecimiento y decrecimiento de la función f definida porf (x) =
√3 + sin (x) .
6. Lo mismo que en el anterior ejercicio si f (x) = x2 + ln(xa
). Discutir los casos a > 0 y
a < 0.
5.1.4 Criterio de la primera derivada
Definición 5.7 Si f ′(x) ≥ 0 en algún intervalo S diremos que f ′(x) tiene signo + en S y sif ′(x) ≤ 0 en el intervalo S, diremos que f ′(x) tiene signo − en S.
Observación. Si f es contínua en algún intervalo abierto S y f ′(x) cambia de signo en S,digamos de + a − (la función f pasa de creciente a decreciente) es claro que en algún puntode S f tiene un máximo, si cambia de − a +, es claro que en algún punto de S, la función ftiene un mínimo. A continuación se ilustra el primer caso.
�
�
f ′ > 0 f ′ < 0
5.1. MÁXIMOS Y MÍNIMOS 155
La anterior observación se formaliza en el siguiente criterio.Sea f : (a, b) → R, una función contínua y diferenciable. Para encontrar los máximos y
mínimos locales de f seguimos el siguiente proceso.
• (1) Resolver f ′(x) = 0, los valores encontrados más los valores en donde f ′(x) no estádefinida son los puntos críticos (Si el intervalo es cerrado en a o b, tales puntos tambiénson puntos críticos de f).
• (2) Los valores encontrados en (1) se representan en la recta real formandose intervalos.
• (3) Se calcula el signo de f ′(x) en cada uno de los intervalos formados en (2).
• (4) Para cada punto crítico x0 se tiene:a) f tiene un máximo en x0 si f ′ pasa de + a −b) f tiene un mínimo en x0 si f ′ pasa de − a +c) si f ′ no cambia de signo, x0 f no tiene ni máximo ni mínimo en x0.
• Si los puntos a y b estuvieran en el intervalo, esto es, f definida en [a, b] , en tales puntossiempre se tienen máximos o mínimos locales. Por ejemplo se tendrá un máximo localsi f es decreciente en [a, a+ ε] para ε suficientemente pequeño.
El máximo absoluto es:
max {f (p) : p es un punto crítico}
El mínimo absoluto es:
min {f (p) : p es un punto crítico}
Ejemplo 5.2 Dada la función f : [−5, 6)→ R definida por
f(x) = 2x3 − 3x2 − 12x
calcular:
• a) Puntos críticos.
• b) Intervalos en donde f es creciente y decreciente.
• c) Máximos, mínimos, máximos locales, mínimos locales.
Solución:
• a)f ′(x) = 6x2 − 6x− 12 = 6(x+ 1)(x− 2).
Resolviendo f ′(x) = 0 obtenemos x = −1, x = 2 estos son los primeros puntos críticos,también es un punto crítico x = −5, luego los puntos críticos en [−5, 6) son: x = −5,x = −1, x = 2. Observemos que x = 6 no es punto crítico pues no pertenece al dominio.
156 CAPÍTULO 5. APLICACIONES DE LA DERIVADA (EN PRUEBA)
• b) Representamos los puntos críticos en la recta real para analizar el signo de f ′ en cadaintervalo que se forma
�−5 −1 2 6
Como −1 y −2 son raíces de f ′(x) = 6 (x+ 1) (x− 2) es fácil averiguar el signo de f ′(x)en los intervalos formados.
f ′(x) > 0 en [−5,−1).
f ′(x) < 0 en (−1, 2).
f ′(x) > 0 en (2, 6).
Resumimos lo anterior en el siguiente diagrama
MinMax[ -5,-1) (-1,2) (2,6)
f ′ > 0 f ′ < 0 f ′ > 0
+ - +
f crecientef decreciente f creciente
• c) De lo anterior concluimos:
— x = −5 mínimo local f(−5) = −265,x = −1 máximo local f(−1) = +7x = 2 mínimo local = f(2) = −20.El mínimo absoluto ocurre en x = −5 y es f(−5) = −275, no existe máximoabsoluto.
5.2. TEOREMAS DE VALOR MEDIO 157
• La siguiente gráfica corresponde a f (x) = 2x3 − 3x2 − 12x
�
�
−5 −1 2 6
−20
−10
10
20
Observación. Si x = 6 estuviera en el dominio, f (6) sería un máximo local y a la vezun máximo absoluto.
Ejercicios propuestos1. En los siguientes ejercicios y en el intervalo indicado hallar (i) puntos críticos, (ii)
Intervalos de crecimiento y decrecimiento, (iii) Máximos y mínimos locales.
2. Sean f g funciones derivables en (a, b) . Supongamos que f ′ (x) > g′ (x) en (a, b) y queexiste un número c en este intervalo tal que f (c) = g (c) . Demostrar que si x ∈ (a, b) ,entonces f (x) > g (x) si x > c, y f (x) < g (x) si x < c.
5.2 Teoremas de Valor Medio
En esta sección se presentan resultados que permiten probar un segundo criterio para de-terminar máximos y mínimos locales. La importancia de los resultados que se presentannaturalmente va más alla de las aplicaciones que se dan.
158 CAPÍTULO 5. APLICACIONES DE LA DERIVADA (EN PRUEBA)
Teorema 5.8 (De Rolle). Sea f : [a, b] → R continua en [a, b] y diferenciable en (a, b) talque f (a) = f (b) = 0. Entonces existe c ∈ (a, b) tal que
f ′ (c) = 0 .
Demostracion. Si f (x) = 0 para todo x ∈ (a, b) no hay nada que mostrar puescualquier punto c ∈ [a, b] satisface la conclusión del teorema.
Supongamos que existe un punto x ∈ (a, b) tal que f (x) �= 0. Como f es continuaen [a, b] existe un máximo o un mínimo de f en (a, b) (el máximo o mínimo nopuede ocurrir en a o b). Si existe un máximo concluimos que existe c ∈ (a, b) talque f (c) es el máximo de f en (a, b), y entonces f ′ (c) = 0.
Llegamos a la misma conclusión si c es un mínimo.�
Geométricamente esto significa que existe un punto c ∈ (a, b) tal que la recta tangente ala curva en (c, f (c)) es paralela al eje X (de las absisas).
�
�
a c b
f
(c, f(c))
Teorema de Rolle
Teorema 5.9 (De Valor Medio). Sea f : [a, b] → R, continua en [a, b] y diferenciable en(a, b). Entonces existe c ∈ (a, b) tal que:
f ′ (c) =f (b)− f (a)
b− aDemostración: Consideremos la función
F (x) = f (x)− f (b)− f (a)b− a (x− a)− f (a)
Observemos que F (a) = F (b) = 0, además F es continua en [a, b] y diferenciableen (a, b) ya que f lo es. Por el Teorema de Rolle existe c ∈ (a, b) tal que F ′ (c) = 0.Por otra parte:
F ′(x) = f ′(x)− f(b)− f(a)b− a ,
5.2. TEOREMAS DE VALOR MEDIO 159
luego:
F ′ (c) = f ′ (c)− f (b)− f (a)b− a = 0,
es decir
f ′ (c) =f (b)− f (a)
b− a .
�
Geométricamente esto significa que existe un punto en c ∈ (a, b) tal que la recta tangentea la curva en (c, f (c)) es paralela al segmento que va desde f (a) hasta f (b) , ilustramos estoen la siguiente gráfica.
�
���
����
����
����
����
����
����
����
�����
a c b
f
(c, f(c))
Teorema del Valor medio
�
Teorema 5.10 (De Cauchy). Sean f, g : [a, b] → R continuas en [a, b] y diferenciables en(a, b) . Supóngase además que g′(x) �= 0 para todo x ∈ (a, b). Entonces:(1) g (a) �= g (b) y(2) existe c ∈ (a, b) tal que
f ′ (c)
g′ (c)=f (b)− f (a)g (b)− g (a)
Demostración. Si g (a) = g (b) , el teorema del valor medio da una contradicción,tal contradicción prueba (1). La demostración de (2) es análoga a la demostracióndel Teorema del valor medio considerando la función
F (x) = f (x)− f (b)− f (a)g (b)− g (a) (g (x)− g (a))− f (a) .
�
160 CAPÍTULO 5. APLICACIONES DE LA DERIVADA (EN PRUEBA)
Ejercicios resueltos
Ejercicio 5.3 Sea f (x) = x3+x, definida en [0, 2] . Encontrar el valor c ∈ (0, 2) , que satisfaceel teorema del valor medio.
Solución. f ′ (x) = 3x2 + 1, el valor de c debe satisfacer la ecuación
f ′ (c) =f (2)− f (0)2− 0 ,
luego:
3c2 + 1 =[23 + 2]−
[(0)3 + 0
]
2= 5,
resolviendo encontramos c = 23
√3.
Notemos que c = −23
√3 no es una solución, pues no pertenece al intervalo (0, 2) . A continua-
ción se muestran las gráficas de la función f y la recta secante.
�
�X
Y
���������
10
0 2
f(x) = x3 + x
�
�X
Y
f(x) = x2/3
Ejercicio 5.4 Sea f (x) = x2/3 definida en [−1, 1] . ¿Existe un valor c ∈ (−1, 1) que satisfaceel teorema del valor medio?.
Solución. Tenemos f ′ (x) = 23x−1/3. Observemos que f (−1) = f (1) = 1., Si existe c ∈
(−1, 1) que satisface el teorema del valor medio debemos tener.
f ′ (c) =f (1)− f (−1)1− (−1)
es decir2
3c−1/3 = 0
esta ecuación no tiene solución, luego no existe c ∈ (−1, 1) que satisface el teorema del valormedio.Comentario. Observemos que la conclusión anterior no contradice al teorema del valormedio, ¿Porque?.
5.2. TEOREMAS DE VALOR MEDIO 161
Ejercicio 5.5 • (a) Si 0 < a < b, demostrar que 1− a
b< ln
(b
a
)<b
a− 1.
• (b)Utilizar el resultado de (a) para mostrar que 1/6 < ln 1.2 < 1/5.
Solución.
• (a) Sea f (x) = ln x, definida en [a, b] . Claramente f satisface las hipótesis del teoremadel valor medio, entonces existe un número c ∈ (a, b) tal que
f ′ (c) =f (b)− f (a)
b− a
puesto que f ′ (x) =1
x1
c=ln b− ln ab− a =
ln (b/a)
b− aes decir
ln
(b
a
)=b− ac
(1)
Por otra parte a < c < b, es decir1
b<1
c<1
a, también es claro que b− a > 0, luego
b− ab
<b− ac
<b− aa
de este resultado se obtiene:
1− a
b<b− ac
<b
a− 1 (2)
por tanto reemplazando el resultado de (1) en (2)
1− a
b< ln
(b
a
)<b
a− 1
• (b) Con a = 5 y b = 6 tenemos 1/6 < ln 1.2 < 1/5.
Ejercicios propuestos1. Verificar el teorema del Valor Medio para f (x) = x3 − x2 definido en [1, 2] .
2. Sea f (x) = 3− 3 (x− 1)2/3 definido en [0, 2]. ¿Es aplicable el teorema de Rolle?.
3. Demostrar que π/6 +√3/15 < arcsin 0.6 < π/6 + 1/8. Sug. Trabaje en
[1
2,3
5
].
162 CAPÍTULO 5. APLICACIONES DE LA DERIVADA (EN PRUEBA)
4. (a) Demostrar que si 0 < a < b
b− a1 + b2
< arctan b− arctan a < b− a1 + a2
(b) Mostrar queπ
4+3
25< arctan
4
3<π
4+1
6
Sug.: Considerar la función f definida por f (x) = arctan x.
5. Demostrar que entre dos raices reales de ex sin x − 1 = 0 hay al menos una raíz deex cosx+ 1 = 0.Sug.: Aplicar el teorema de del valor medio a la función definida por e−x− sinx.
6. Aplicar el teorema del valor medio para mostrar que si 0 < x < 1 se cumple
x < arcsin x <x√1− x2
7. Sea f una función definida en un intervalo cerrado [a, b] con a < b. Demostrar que sif ′ (x) = 0 para todo x del dominio, entonces f debe ser la función constante.
8. ¿En que punto la tangente a la parábola f (x) = −x2 + 8x − 15 es paralela a la rectax+ 2y − 5 = 0?, ¿en que punto punto perpendicular?..
5.3 Criterio de la segunda derivada
En esta sección se discute un criterio para decidir si en un punto crítico existe un máximo oun mínimo. Iniciamos esta sección dando algunas definiciones.
Definición 5.11 (Cóncava hacia arriba).Sea f : (a, b) → R. La función f es concavahacia arriba si para puntos cualesquiera a1, b1 en (a, b)
f(x) ≤ f(b1)− f(a1)b1 − a1
(x− a1) + f(a1),
para todo x ∈ (a1, b1).
5.3. CRITERIO DE LA SEGUNDA DERIVADA 163
�
�
������
������
����
x b1a1
f(x)
f(b1)
f(b1)−f(a1)b1−a1 (x− a1) + f(a1)
f(a1)
CONCAVA HACIA ARRIBAY
X
Definición 5.12 (Cóncava Hacia Abajo).Sea f : (a, b) → R una función f es cóncavahacia abajo si para puntos cualesquiera a1, b1 en (a, b)
f(x) ≥ f(b1)− f(a1)b1 − a1
(x− a1) + f(a1),
para todo x ∈ (a1, b1).
�
�x b1a1
f(x)
f(b1)
f(b1)−f(a1)b1−a1 (x− a1) + f(a1)
f(a1)
CONCAVA HACIA ABAJOY
X
Teorema 5.13 Sea f : [a, b]→ R, una función tal que f ′′ existe en (a, b).
1. Si f ′′(x) > 0 en (a, b) entonces f es cóncava hacia arriba en (a, b).
2. Si f ′′(x) < 0 en (a, b) entonces f es cóncava hacia abajo en (a, b).
164 CAPÍTULO 5. APLICACIONES DE LA DERIVADA (EN PRUEBA)
Demostración: Sean a1, b1 puntos cualesquiera en (a, b) tales que a1 < b1.
� �a a1 x b1 b
Tómese un punto arbitrario x ∈ (a1, b1) como se muestra en la gráfica. mostrare-mos que
f(x) ≤ f(b1)− f(a1)b1 − a1
(x− a1) + f(a1)
�
�
������
������
����
x b1a1
f(x)
f(b1)
f(b1)−f(a1)b1−a1 (x− a1) + f(a1)
f(a1)
Es claro que f es continua y diferenciable en los intervalos [a1, x] y [x, b1] (Recor-demos que la existencia de la derivada en un conjunto implica la continuidad enel conjunto), luego por teorema del Valor Medio existen c1 ∈ (a1, x) y c2 ∈ (x, b1)tales que
f ′(c1) =f(x)− f(a)
x− a y f ′(c2) =f(b)− f(x)
b− x .
Ahora usaremos la hipótesis de que f ′′(x) > 0 para todo x ∈ (a, b). De estahipótesis concluimos que f ′ es creciente en (a1, b1). Puesto que c1 < c2 debemostener f ′(c1) < f ′(c2), por tanto
f(x)− f(a1)x− a1
<f(b1)− f(x)
b1 − x
de éste último resultado se obtiene:
f(x) <f(b1)− f(a1)
b1 − a1(x− a1) + f(a1).
Esto prueba la primera parte del teorema. De manera similar se prueba el casof ′′(x) < 0.
�
5.3. CRITERIO DE LA SEGUNDA DERIVADA 165
Ejemplo 5.3 Sea f : (0,∞)→ R, una función definida por f(x) =1
x. Puesto que f ′′(x) =
2
x3
se tiene f ′′(x) > 0 en (0,∞), luego f(x) = 1
xes cóncava hacia arriba en (0,∞). Por otra
parte f ′′ (x) < 0 en (−∞, 0) , luego f(x) = 1xes cóncava hacia abajo en (−∞, 0).
�
�X
Y
Ejemplo 5.4 Consideraremos la función f : R→ R definida por
f(x) = ax2 + bx+ c,
tenemos, f ′′(x) = 2a, entonces f es cóncava hacia arriba en R si a > 0 y es cóncava haciaabajo si a < 0. A continuación se ilustran los casos a > 0 y a < 0 respectivamente.
�
�X
Y�
�X
Y
a > 0 a < 0
Teorema 5.14 Sea f : [a, b] → R continua en [a, b]. Sea c un punto crítico de f en (a, b) yf ′ (c) = 0. Supongamos también que f ′′ existe en (a, b). Entonces
166 CAPÍTULO 5. APLICACIONES DE LA DERIVADA (EN PRUEBA)
(a) Si f ′′(x) < 0 en (a, b) f tiene un máximo local en c.
(b) Si f ′′(x) > 0 en (a, b) f tiene un mínimo local en c.
Demostración.
(a) Si f ′′(x) < 0 en (a, b), f ′(x) es estrictamente decreciente en (a, b) pero a < c < b yf ′(c) = 0, luego f ′ cambia de positivo a negativo, por tanto por el criterio de la primeraderivada f tiene un máximo en x = c.
(b) Se prueba como en (a)
�
Para terminar esta sección se da un criterio muy importante sobre máximos y mínimosllamado Criterio de la segunda derivada.
Corolario 5.15 (Criterio de la Segunda Derivada). Sea f : [a, b] → R continua en[a, b]. Sea c un punto crítico de f en (a, b) y f ′ (c) = 0. Entonces
(a) Si f ′′(c) < 0 en (a, b) f tiene un máximo local en c.
(b) Si f ′′(c) > 0 en (a, b) f tiene un mínimo local en c.
Demostración. Si f ′′(c) �= 0, existe un intervalo abierto (a, b) que contiene a cen donde f ′′(x) �= 0 y tiene el mismo signo de f ′′(c) mas aún, si además f ′(c) = 0usando el teorema f tiene un máximo local o un mínimo local en c dependiendosi f ′′(c) < 0 o f ′′(c) > 0.
�
Nos falta aún una inquietud, ¿qué conclusión sacamos si f ′′(c) = 0, si f ′′(c) no estádefinida?. En este caso el criterio falla. Sin embargo si la curva pasa de cóncava hacia arribaa cóncava hacia abajo diremos que c es un punto de inflexión.
Ejemplo 5.5 Consideremos la función f : R→ R definida por
f(x) = x+1
x.
Tenemos f ′(x) = 1 − 1
x2resolviendo f ′(x) = 0 encontramos los puntos x = 1, x = −1,
observemos que f ′(x) no está definida en x = 0, luego los puntos críticos son: x = −1, x = 0,x = 1.Se tiene también f ′′(x) =
1
x3, luego f ′′(−1) = −1 < 0, f ′′(1) = 1 > 0 y f ′′(0) no está definida.
Conclusión.
• mínimo local en x = 1, el mínimo local es f(1) = 2,
5.3. CRITERIO DE LA SEGUNDA DERIVADA 167
• máximo local en x = −1, el máximo local es f(−1) = −2,
• Punto de inflexión en x = 0.(En este punto f ′′ no está definida y f cambia de concavidadalrededor de este punto)
�
�X
Y
f(x) = x+ 1x
−1 1
Ejercicios propuestos
En los siguientes ejercicios, encontrar (a) puntos críticos, (b) máximos y mínimos, (c) inter-valos de crecimiento y decrecimiento, (d) intervalos de concavidad, (e) puntos de inflexión,(f) gráfica de la función.
1. f (x) = xx
Sol.: (a) e−1
2. f (x) = 15x5 + x4 − 4
3x3 + 2x2 − 5x
Sol: (a) −5, 1
3. f (x) = x2 − 54x
Sol.: (a) −3.
4. f (x) = 8 + x1/4
5. f (x) = 14x4 − 5
36x3 − 1
16x2 + 1
24x
Sol.:(a) 12, 14,−1
3
6. f (x) = x4/5 (x2 − 2) .
Sol. (a) ±27
√7
7. f (x) =−11 + x2
. Sol. (a) 0
168 CAPÍTULO 5. APLICACIONES DE LA DERIVADA (EN PRUEBA)
5.4 Problemas sobre Máximos y Mínimos
5.4.1 Problemas Geométricos
Para resolver este tipo de problemas conviene recordar las siguientes fórmulas:
• 1) Triángulo de altura h y base b
bh21Area=
h
b
• 2) Círculo de radio r
r rπ2 nciaCircunfere
de Longitud
=2 Area rπ=
• 3) Sector circular de ángulo α: (α medido en radianes)
r α221 Area r=
rα arco
de Longitud
=
α r
• 4) Trapecio de bases b y B con altura h:
B
( )bBh += 21 Areah
b
• 5) Cono circular recto de altura h y radio basal r:
5.4. PROBLEMAS SOBRE MÁXIMOS Y MÍNIMOS 169
r
h
grπ lateral Area =
g2 basal Area rπ=
2 totalArea rgr ππ +=
hr231 Volumen π=
• 6) Esfera de radio r:
r
24 Superficie rπ=3
34 Volumen rπ=
• 7) Cilindro de radio de base r y altura h:
r
h
2 basal Superficie rπ=
rhπ2 lateral Superficie =
hr 2 Volumen π=
También es necesario recordar las propiedades de semejanza de triángulos.
γβ α w
c
v
b u
a
α
β
γ
w
c
v
b
u
a ==
A
UVWABC ∆≡∆
W
V
U
C
B
170 CAPÍTULO 5. APLICACIONES DE LA DERIVADA (EN PRUEBA)
Ejercicio 5.6 Un triángulo isósceles es inscrito en un círculo de radio r que es conocido (verfigura). Si el ángulo 2α está entre 0 y 1
2π, encontrar el valor más grande del perímetro del
triángulo. Dar detalles de su razonamiento.
αx
r
h
A0
C
EB
Solución. Sea x el lado igual del triángulo y 2h la base. El perímetro del triánguloestá dado por P = 2x + 2h. Puesto que A,B,C son puntos de un semicírculo, el triánguloABC es un triángulo rectángulo. También por construcción el triángulo AEC es un triángulorectángulo, entonces:
En el ∆AEC : sinα =CE
AC=h
x
En el ∆ABC : cosα =AC
AB=
x
2r
por tanto: x = 2r cosα, h = 2r cosα senα, y
P (α) = 4r cosα + 4r cosα sinα, DP =[0,π
4
].
Derivando se encuentra:
P ′ (α) = 4r(− sinα− sin2 α + cos2 α
).
Resolviendo la ecuación P ′ (α) = 0 se obtienen los puntos: α = 16π y α = 3
por tanto en α = 16π se encuentra un máximo, el valor máximo de P es P
(16π)= 3r
√3. Por
tanto el valor más grande del perímetro del triángulo isosceles inscrito en la circunferencia deradio r es 3r
√3.
Ejercicio 5.7 Pruebe que de todos los rectángulos de área dada, el cuadrado es el que tienemenor perímetro.
5.4. PROBLEMAS SOBRE MÁXIMOS Y MÍNIMOS 171
Solución. Sea x, y los lados del rectángulo de área dada a, es decir xy = a.
x
y
ayx =
El perímetro está dado por P = 2 (x+ y) . A partir de xy = a se encuentra y = a/x, portanto el perímetro se puede escribir como:
P (x) = 2(x+
a
x
), DP = (0,∞) ,
derivando se obtiene;P ′ (x) = 2
(1− a
x2
),
resolviendo P ′ (x) = 0 se encuentra x =√a, (x = −√a /∈ DP ). La segunda derivada es:
P ′′ (x) =4a
x3,
luego P ′′ (√a) = 4a
(√a)
3 > 0, luego en x =√a se tiene un mínimo. Finalmente y =
a√a=√a,
luego x = y =√a, esto muestra que efectivamente el rectángulo de menor perímetro con un
área dada es el cuadrado.
Ejercicio 5.8 Hallar las dimensiones del cilindro circular recto de volumen máximo que sepuede inscribir en una esfera de radio R.
Solución. Sea 2h la altura del cilindro y r el radio de su base.
r
h2h R
Del gráfico vemos que:r2 + h2 = R2 (1)
El volumen del cilindro está dado por
V = 2πr2h (2)
172 CAPÍTULO 5. APLICACIONES DE LA DERIVADA (EN PRUEBA)
Despejando r2 de (1) y reemplazando en (2) se tiene el volumen en función de h:
V (h) = 2π(R2h− h3)
Calculamos ahora V ′(h) y V ′′(h)
V ′(h) = 2π(R2 − 3h2)V ′′(h) = −12πh
Resolviendo V ′(h) = 0 encontramos el punto crítico h =√33R. Puesto que V ′′
(√33R)=
−2π√3 < 0, concluimos que V tiene un máximo en h =
√3
3R. Reemplazando h =
√3
3R en
(1) encontramos que r =
√6
3R.
Conclusión: Si la esfera es de radio R el cilindro de máximo volumen que se puedeinscribir en ella tiene:
Altura = 2h =2
3
√3R
Radio =1
3
√6R
Ejercicio 5.9 Hallar la altura y radio de un cilindro de volúmenmáximo que puede inscribirseen un cono circular recto de altura h y radio r.
Solución.
r
D
A
E
C
B
r
D
A
E h
C
B
yx
h
Sean BC = h, AC = r, DE = x, EC = y. Los triángulos ABC y DBE son semejantes,luego:
DE
AC=BE
BC,
por tantox
r=h− yh
(1)
El volumen del cilindro está dado por
V = πx2y (2)
Despejando y de (1) se encuentra y =h
r(r − x); reemplazándolo en (2) obtenemos el volumen
en función de x:
V (x) =πh
r(rx2 − x3), DV = (0, r)
5.4. PROBLEMAS SOBRE MÁXIMOS Y MÍNIMOS 173
Derivando se tiene:
V ′(x) =πh
r(2rx− 3x2)
V ′′ (x) =πh
r(2r − 6x)
De V ′(x) = 0 encontramos x = 0 y x = 23r. El punto x = 0 no pertenece al dominio. Con
x = 23r se encuentra V ′′
(23r)= −2πh < 0. Concluimos que V tiene un máximo en x = 2
3r.
Finalmente reeemplazando x = 23r, en y =
h
r(r − x) se tiene y = 1
3h.
Conclusión:Radio del cilindro: x = 2
3r
Altura del cilindro: y = 13h
Volumen máximo: V = πx2y = π(23r)2 (1
3h)= 4
27πr2h.
5.4.2 Problemas de construcción
Ejercicio 5.10 Se debe construir una caja de base cuadrada, abierta en su parte superior.El área del material con que se va a construir la caja debe ser de 100 cm2. ¿Cuáles deben sersus dimensiones para que su volumen sea el máximo posible?
Solución.
x
y
x
Sean x, y el lado de la base y la altura respectivamente. El volumen está dado por
V = x2y (1)
Puesto que el área total de la caja debe ser 100 cm2, debemos tener:
x2 + 4xy = 100. (2)
De (2) se encuentra
y =100− x24x
(3)
reemplazando en (1) se encuentra:
V (x) =1
4
(100x− x3
), DV = (0,∞) (4)
174 CAPÍTULO 5. APLICACIONES DE LA DERIVADA (EN PRUEBA)
Derivando:
V ′ (x) =1
4
(100− 3x2
)
V ′′ (x) = −32x
De V ′ (x) = 0, encontramos el único punto crítico x = 103
√3. Puesto que V ′′
(103
√3))−5
√3 < 0
concluimos con que V tiene un máximo en x = 103
√3, reemplazando este valor en (3) se
encuentra y =100−( 103
√3)2
4( 103√3)
= 53
√3.
Conclusión.Lado de la base x = 10
3
√3
Altura: y = 53
√3
Volumen máximo: V =(103
√3)2 (5
3
√3)= 500
9
√3.
Ejercicio 5.11 Una pieza de alambre de longitud L se corta en dos partes, con una de ellasse forma un triángulo equilátero y con la otra una circunferencia. ¿Cómo se debe cortar elalambre para que la suma de las áreas sea mínima?
Solución.
x21
xx
23
r
Sea x el lado del triángulo y r el radio de la circunferencia. El área total es
A =1
4
√3x2 + πr2 (1)
El perímetro del triángulo es 3x y la longitud de la circunferencia es 2πr. Puesto que lalongitud total del alambre es L se debe tener:
3x+ 2πr = L (2)
Despejando x de (2) y reemplazando en (1) obtenemos el área en función de r.
x =L− 2πr3
(3)
A(r) =1
36
√3 (L− 2πr)2 + πr2, DA =
(0,L
2π
)((4))
Derivando tenemosA′(r) = π
9
√3 (−L+ 2πr) + 2πr
A′′(r) = π9
√3 (2π) + 2π
5.4. PROBLEMAS SOBRE MÁXIMOS Y MÍNIMOS 175
Resolviendo A′(x) = 0 encontramos el punto crítico r =
√3L
18 + 2√3π
∈ DA. Puesto que
A′′(r) > 0 para toda r, en particular es positivo para el punto crítico encontrado. Concluimosque en el punto crítico encontrado, la función A tiene un mínimo.
Conclusión.Lado del triángulo: x =
L− 2πr3
=3L
9 + π√3≈ 0. 20774L
Radio de la circunferencia: r =
√3L
18 + 2√3π
≈ 0.05 9968L.
Area mínima A
( √3L
18 + 2√3π
)
= 34L2
3√3 + π
(9 + π
√3)2 .
Un ejemplo numérico.
cm10=Lcm0774.2=x
cm59968.0=r
2cm 99842 mínima Area .A=
Ejercicio 5.12 Una ventana tiene la forma de un rectángulo coronado por un semicírculocon diámetro igual a la base del rectángulo. Hallar las dimensiones de la ventana cuando elperímetro es p metros y el área es la mayor posible.
Solución.
r
r
r2
h
Sean h la altura del rectángulo y 2r la base del rectángulo, por lo tanto r es el radio de lasemicircunferencia. El perímetro total de la ventana está dado por
2h+ 2r + πr = p (1)
El área total esA = 2rh+
1
2πr2 (2)
176 CAPÍTULO 5. APLICACIONES DE LA DERIVADA (EN PRUEBA)
Despejando h de (1) y reemplazándolo en (2) obtenemos el área en función de r
h =p− 2r − πr
2(3)
A(r) = pr − 2r2 − 12πr2 (4)
Derivando:A′(r) = p− 4r − πrA′′(r) = −4− π
Resolviendo A′(r) = 0 encontramos r =p
4 + π, en este punto crítico, A tiene un máximo pues
A′′(r) < 0 para todo r.Conclusión.Radio de la semi circunferencia: r =
p
4 + π
Altura del rectángulo: h =p
4 + π
Área de la ventana: A =p2
2(4 + π).
Ejercicio 5.13 Se tiene que hacer un depósito sin tapa de base cuadrada con una capacidadde V cm3. ¿Qué dimensiones debe tener el depósito de manera que el área sea mínima?
Solución.
x
y
x
Sean x el lado de la base, y la altura del depósito. El volumen del depósito viene dado por:
V = x2y (1)
El área total que se requiere para la construcción es la suma del área de la base (x2) más lasuma de las áreas laterales (4xy), esto es,
A = x2 + 4xy (2)
Despejando y de (1) y reemplazándolo en (2) obtenemos el área en función de x,
y =V
x2(3)
A = x2 +4V
x(4)
5.4. PROBLEMAS SOBRE MÁXIMOS Y MÍNIMOS 177
Derivando obtenemos:
A′(x) = 2x− 4Vx2
A′′
(x) = 2 +8V
x3.
Resolviendo A′(x) = 0 encontramos x = 3√2V , observemos que en x = 0 A′ no está definida,
luego los puntos críticos son x = 0 y x = 3√2V . Sin embargo x = 0 no es una solución
aceptable pues en tal caso el volumen V es cero. En x = 3√2V se tiene un mínimo pues
A′′( 3√2V ) = 6 > 0.
Conclusión:Lado de la base: x = 3
√2V
Altura: y =V
x2= 3
√V
4Area total: A = 3(4V 2)
1
3 .
Ejercicio 5.14 En un almacen se va a abrir un pasillo perpendicular a uno ya existente de8 metros de ancho. ¿Qué ancho debe darse al pasillo para que una varilla de 27 metros delargo pueda moverse de un pasillo a otro en una posición horizontal?
Solución.
A R
Q
θ
B
8
P
y
y−27
θ
yPB −= 27
xAR=
x
8=BQ
yAP=
Sea x el ancho del pasillo a construir. En la figura AB es la varilla de 27 metros. De la
figura sen θ =x
y, cos θ =
8
27− y . De estas igualdades se obtiene
y =x
sen θ
27− y =8
cos θ;
sumando miembro a miembro se encuentra:
x
sen θ+
8
cos θ= 27. (1)
Despejando x tenemos el ancho del pasillo como función de θ
x(θ) = 27 sen θ − 8 tan θ (2)
Derivando:x′(θ) = 27 cos θ − 8 sec2 θx′′(θ) = −27 sen θ − 16 sec2 θ tan θ
178 CAPÍTULO 5. APLICACIONES DE LA DERIVADA (EN PRUEBA)
Resolviendo x′(θ) = 0 se encuentra cos θ = 23, de esto encontramos sen θ =
√53
y tan θ =√52.
Para este ángulo x′′(θ) < 0, luego x tiene un máximo en θ = arccos(23).
Conclusión.Ancho del pasillo: x = 27
(√53
)− 8(√
52
)= 5
√5 m.
5.4.3 Problemas de costos
Ejercicio 5.15 Una distribuidora tiene la siguiente política de venta de cierto componenteelectrònico. Si el pedido es menor o igual a 100 cajas el costo es de $US 10 por caja. Porcada 25 cajas adicionales se tiene una rebaja de un 5%. ¿Cuál es el pedido que produce elmáximo valor de la venta?.
Solución. Sea x el número de cajas de un pedido. Si x ≤ 100 el costo por caja es $US10 y el importe de la venta es 10x dólares. Si x > 100 (x toma valores 125, 150, ....), el costopor caja es
10− (0.05) (10)(x− 10025
)= 10− 0.5
(x− 10025
)
Si V es el importe de la venta tendremos:
V (x) =
10x si x ≤ 100[10− 0.5
(x− 10025
)]x si x ≥ 100
La parte que nos interesa de esta función es cuando x ≥ 100. Para encontrar un puntoextremo encontramos V ′(x), para x ≥ 100, luego de esto resolvemos V ′(x) = 0.
V ′(x) = 10− 0.525(2x− 100) .
V ′′ (x) = −0.5 (2)25
< 0 para todo x
Resolviendo V ′(x) = 0, obtenemos x = 300, (aquí, V debe tener un màximo ¿porque?) conlo que el importe de la venta es V (300) = 1800.
1800
1000
450300100 x
( )xV
0
Nota: Observemos que hemos supuesto que V (x) es contínua siendo que en realidad nolo es. Sin esta consideraciòn, como sabemos, no podríamos derivar la función V (x).
5.4. PROBLEMAS SOBRE MÁXIMOS Y MÍNIMOS 179
Ejercicio 5.16 Una entidad bancaria tiene las siguientes tarifas: p Bs por cada mil paraoperaciones de hasta M Bs. Para la cantidad que sobrepase esta cifra, disminuye la tasaanterior en r Bs por cada mil. Hallar la operación óptima de manera que el beneficio delbanco sea máximo.¿Cuál es la operación óptima si p = 30, M = 50000, r = 0.375?
Solución: Sea x la cantidad en Bs de la operación buscada. Si x ≤M el beneficio para el
banco espx
1000. Si x > M la tasa es p− r (x−M)
1000por cada mil que excede aM (por ejemplo
si x =M + 1000, la tasa es p− r), luego el beneficio en este caso es:
pM
1000+
(p− r(x−M)
1000
)(x−M1000
).
Si B es la función del beneficio:
B(x) =
px
1000si x ≤M
pM
1000+
(p− r(x−M)
1000
)(x−M1000
)si x ≥M
Si x ≥M ,
B′(x) =1
1000
(p− 2r(x−M)
1000
).
Resolviendo B′(x) = 0 se encuentra x =M+500p
r. Este punto es un máximo pues B′′(x) < 0
para todo x ≥ M. Si M = 50000, p = 30 y r = 0.375, el banco obtiene el beneficio máximo
cuando x = 50000 +500 (30)
0.375= 90000 .
Ejercicio 5.17 Un minero desea abrir un túnel desde un punto A hasta un punto B situado80 metros más abajo de A y 240 metros más al este de el. Debajo el nivel de A es roca; arribade este nivel es tierra blanda. Si el costo de construcción del túnel es $US 30 por metro linealen tierra blanda y $US 78 en roca, hállase el costo del túnel de manera que este sea mínimo.
Solución. Sea x la parte del tunel por tierra blanda, y la parte del tunel por roca, comose ilustra en el siguiente gráfico.
( )22 24080 xy −+=
x
BD
CA
E
x−240
80 80
240
180 CAPÍTULO 5. APLICACIONES DE LA DERIVADA (EN PRUEBA)
En el gràfico AE = CD = 80, EB = 240, DB = 240−x. Por las condiciones del problema,el costo C es:
C = 30x+ 78y, ((1))
puesto quey =
√802 + (240− x)2 ((2))
se tiene el costo en funciòn de la variable x
C ′(x) = 30− 78(240− x)√802 + (240− x)2
Derivando se obtiene:
C ′(x) = 30− 78(240− x)√802 + (240− x)2
Resolviendo C ′(x) = 0, obtenemos x =620
3, reemplazando este valor en (1) se tiene y =
260
3.
Por tanto el costo es:
C = 30
(620
3
)+ 78
(260
3
)= 12960.
Ejercicios propuestos
1. Encontrar el área del mayor triángulo isósceles que tenga un perímetro de 18 cm. (Sol:área=9
√3).
2. Probar que de todos los triángulos rectángulos con la misma hipotenusa, el de áreamáxima es el isósceles.
3. Un tanque debe tener un volumen dado V y la forma de un cilindro circular recto consemiesferas agregadas en sus extremos. El material para los extremos cuesta dos vecesmás por unidad cuadrada de lo que cuesta el de los lados. Hallar las dimensiones máseconómicas.
Sol.: radio=123
√3V2π, altura=2 3
√3V2π.
4. De una lámina circular de radio r se quiere recortar un sector circular para construirun cono circular recto. Hallar el ángulo de corte θ de modo que el volumen del cono seamáximo.
Sol.: θ = 2π√
23.
5. Un tronco de un arbol que mide h metros, tiene la forma de un cono truncado. Losdiámetros de sus bases miden 2b y 2a metros respectivamente. Se debe cortar una vigade sección transversal cuadrada cuyo eje coincide con el eje del tronco y cuyo volumensea el mayor posible. ¿que dimensiones debe tener la viga? (se supone que a, b y h sonconocidos)
(Sug. Sea 2x la longitud del lado de la base y y la altura, por semejanza de triángulosh−yy= x−a
b−x )
5.4. PROBLEMAS SOBRE MÁXIMOS Y MÍNIMOS 181
Sol.: x = 23b, y = hb
3(b−a) .
6. (a) ¿Cómo deberían elegirse dos números no negativos cuya suma sea 1 para maximizarla suma de sus cuadrados?, (b) ¿Y para minimizar la suma de sus cuadrados?. Sol.: (a)0, 1. (b) 1/2, 1/2.
7. Cómo deberían elegirse dos números no negativos cuya suma sea 1 para
(a) maximizar el producto del cuadrado de uno de ellos por el cubo del otro. Sol.: 2/5
(b) minimizar el anterior producto. Sol.: 0, 1
8. Hallar puntos de la hipérbola x2 − y2 = a2 más cercanos al punto (0, b) donde b > 0.
Sol.:(±12
√4a2 + b2, 1
2b)
9. Considere la curva de ecuación y2 + x− 192= 0
(a) Hallar puntos de la curva que se encuentren a la menor distancia del origen.
(b) Hallar los puntos de curva que se encuentren a la menor distancia del origen cuandoy ∈ [−1, 1] .(c) Hallar los puntos de curva que se encuentren a la mayor distancia del origen cuandoy ∈ [−1, 1] .Sol. (a)
(12,±3)(b)(172,±1)(c)(192, 0).
10. Se debe construir una lata cilíndrica (con tapa) de a unidades cúbicas de volumen demanera que se gaste el menor material posible. ¿cual debe ser la relación entre la alturah y el radio r de la base para que esto ocurra?. (Sol: h = 2r). (Considere que el volumenbuscado es a unidades cúbicas)
11. Encontrar la ecuación de la recta que pasa por (3,4) y forma con el primer cuadranteun triángulo de área mínima. (Sol: 4x+ 3y − 24 = 0).
12. Un rectángulo tiene dos de sus vértices sobre el eje X y los otros dos están respecti-vamente sobre las rectas y = x y 4y + 5x = 20. Hallar el valor y para que el área delrectángulo sea máximo. (Sol: 10/9).
13. Una hoja de papel tiene a unidades cuadradas de material impreso, con márgenes su-perior e inferior de 4 unidades, y márgenes laterales de 2 unidades. Determinar cualesdeben ser las dimensiones de la hoja para que se use la menor cantidad de papel. (Sol:
base=8 +
√2a
2, altura=8 +
√2a ).
14. Determinar la superficie lateral del cilindro recto de área máxima que puede ser inscritoen un cono circular recto de radio basal b y altura a. (Sol: área= abπ/2.).
15. Un alambre de longitud L, es cortado en dos partes, con una parte se forma un cuadradoy con la otra una circunferencia. ¿De que modo debe ser cortado para que la suma de
las áreas sea mínima?. (Sol: Para la circunferencia:Lπ
4 + π, para el cuadrado
4L
4 + π).
182 CAPÍTULO 5. APLICACIONES DE LA DERIVADA (EN PRUEBA)
16. Un punto movil P describe la curva y = 4/x, x > 0. Determinar la distancia mínimade P al origen. (Sol: 2
√2).
17. Se necesita construir un embudo cónico cuya generatriz debe ser igual a 20 cm. ¿Cuál
debe ser la altura del embudo para que el volumen sea el mayor posible?. (Sol:20√3
3).
18. Hallar un punto sobre la parábola y = 4 − x2, tal que la recta tangente en el segundocuadrante y los ejes coordenados determinen un triángulo de área mínima. (Sol: x =−√4/3).
19. Si un punto de una elipse inscrito en un semicírculo, está sobre el diámetro y tiene otrosdos puntos sobre la semicircunferencia en posición simétrica . Demostrar que su área
será un máximo igual a2πr2
3√3, donde r es el radio de la circunferencia. (Sug. sean a, b los
semiejes de la elipse de centro (0, b) , la intersección de la elipse y la semicircunferenciadebe ser única en el primer cuadrante, esto da una relación entre a y b)
x
y
rr−
r
20. Un cono recto circular va a ser circunscrito en una esfera de radio conocido. Encontrarla razón de la altura y el radio de la base del cono de volumen mínimo. (Sol: 2
√2).
21. Demostrar que el triángulo isósceles de área máxima que puede inscribirse en una cir-cunferencia es un triángulo equilátero.
22. Un cono es cortado por un plano paralelo a su base. ¿ A que distancia de la base debeser hecho el corte, para que el cono recto de base en la sección determinada por el cortey de vértice en el centro de la base del cono dado tenga volumen máximo?. (Sol: 1/3de la altura del cono).
23. Hallar el área mínima del triángulo isósceles circunscrito a la elipse b2x2 + a2y2 = a2b2
cuyo lado desigual es paralelo al eje X. (Sol: altura 3b, base 2a√3, área 3ab
√3). (Sug.
Considere un punto (u, v) de la elipse en el primer cuadrante, calcule la recta tangentea la elipse que pasa por este punto. La intersección de esta recta con el eje Y permitecalcular la altura, la intersección de la recta tangente con la recta y = −b permitecalcular la base)
24. La curva del costo total de un producto esta dado por y = 15x − 8x2 + 2x3, en dondey representa el costo total y x representa la cantidad producida. Suponga que lascondiciones del mercado indican que deben producirse entre 3 y 10 unidades. Determine
5.4. PROBLEMAS SOBRE MÁXIMOS Y MÍNIMOS 183
la cantidad para el cual el costo medio es mínimo. (Sug. Costo medio y =y
x. Sol: y = 9,
para x = 3).
25. Un fabricante produce miniaturas que vende al precio de $US 3 por unidad, hasta 1000unidades. Por cada 100 unidades adicionales el precio se reduce en 6 centavos por ciento.¿De que magnitud es el pedido que produce el máximo valor en dólares?. (Sol: 3500).
26. Hallar la longitud de la varilla más larga que se puede transportar horizontalmenteen la esquina que une un corredor de 8m de ancho con otro de 4m de ancho.(Sol:4(1 + 41/3
)3/2).
����������������
4
8
27. Un fabricante puede vender n artículos por semana a p dólares por artículo, donden = 125−p. El costo para producir n artículos es 110−100−n2/2 dólares. Encuéntreseel precio que maximiza su beneficio.
28. Una ventana esta hecha de un rectángulo y de un triángulo equilátero. ¿Cuales debenser las dimensiones de la ventana para maximizar el área si el perímetro es fijo?.
29. Cuando una luz proveniente de un punto luminoso choca con una superficie plana,la intensidad de la iluminación es proporcional al coseno del ángulo de incidencia einversamente proporcional al cuadrado de la distancia respecto a la fuente. ¿A quealtura debe estar colocada una luz por encima del centro de un círculo de 12 pies deradio para obtener la mejor iluminación a lo largo de la circunferencia?
���������
θ
y
12
184 CAPÍTULO 5. APLICACIONES DE LA DERIVADA (EN PRUEBA)
30. Sean P,Q puntos del plano en el mismo lado del eje de las x. Sea R un punto sobre eleje de las x (ver figura). Demostrar que la suma de las distancias PR y QR es mínimacuando los ángulos θ1 y θ2 son iguales.
����
����
���
P Q
y2
θ2
a− xx R��
θ1
y1
��
31. Los investigadores de fisiología celular intentan determinar la permeabilidad de unacélula a varios compuestos si la concentración al exterior de una célula se mantiene enun nivel fijo. Si
A = superficie de la célula
V = volumen de la célula
k >= es la constante de permeabilidad
x ≥ representa la concentración del compuesto dentro de la célula, entonces se tiene elsiguiente modelo, que con frecuencia se utiliza en la práctica:
dx
dt= k
A
V(c− x) .
• (a) Suponiendo x (0) < c, determinar la máxima concentración posible en lacélula.
• ¿Puede probar que la respuesta en (a) es realmente un máximo?
• ¿Cuál es la concentración mínima posible?, ¿Porque?.
Sol.: (a) x = c, (b) Aplicar el criterio de la segunda derivada, (c) cuando x = 0.
32. Un agitador AB de longitud 2l (ver figura), se apoya sobre el fondo y el borde de unacápsula de porcelana; suponiendo que no existiera rozamiento, la varilla se moveria hastaalcanzar una posición de equilibrio. Sabiendo que el centro de gravedad, en el estadode equilibrio estable, adquiere la posición más baja de entre todas las que puede tomar,
5.5. LA DERIVADA COMO RAZÓN DE CAMBIO 185
se pide la posición de equilibrio de la varilla AB.
��
���
��
��
���
E
C
A
B
θ
(Sug.: Si C es el centro de gravedad de AB, la distancia y = EC será máxima en laposición de equilibrio buscada. Calcule y en función del ángulo θ)
Sol.: cos θ =l
8r±√
l2
64r2+1
2.
5.5 La Derivada como Razón de Cambio
Sea y = y(x), y x = x(t), esto es y es una función de x y x es una función de t. La expresióndx
dtse llama razón de cambio de x respecto a t. Por la regla de la cadena tenemos:
dy
dt=dy
dx· dxdt
A continuación se presentan aplicaciones de la razón de cambio.
Ejercicios resueltos
Ejercicio 5.18 Una escalera de 20 metros se apoya contra un edificio. Hallar:a) La velocidad a la que se mueve el extremo superior cuando el inferior se aleja del edificio
a una velocidad de 2 metros por segundo y se encuentra a una distancia de él de 12 metros.b) La velocidad a la que disminuye la pendiente.
Solución.
A
y20
C
B
x
θ
x2=dtdx
186 CAPÍTULO 5. APLICACIONES DE LA DERIVADA (EN PRUEBA)
(a) Sea AB = 20, la longitud de la escalera, y = CB la altura del extremo superior de laescalera al piso, x = AC la distancia del extremo inferior de la escalera a la pared. Entonces
y =√400− x2 (1)
m = tan θ =y
x(2)
aquí m es la pendiente que forma la escalera con el piso. Nótese que x = x (t) y y = y (t) , esdecir son funciones dependientes de la variable t. Derivando en (1) respecto de t se encuentra:
dy
dt=
−x√400− x2
dx
dt
Como dato se tiene que dxdt= 2, por otra parte se pide calcular dy
dtcuando x = 12, por tanto:
dy
dt=
−12√400− (12)2
(2) = −32,
esto muestra que el extremo superior baja a una velocidad de 32metros por segundo, (el signo
menos indica que la altura disminuye).(b) En (2) derivando m respecto de t se encuentra:
dm
dt=
xdydt− y dx
dt
x2
=xdydt−√400− x2 dx
dt
x2
reemplazando x = 12, dxdt= 2 y dy
dt= −3
2se tiene:
dm
dt=
(12)(−32
)−√400− (12)2 (2)
(12)2
= −2572
lo que muestra que la pendiente disminuye a una velocidad de 2572
metros por segundo.
Ejercicio 5.19 Se arroja una piedra a un lago, causando ondas circulares. Si, después de tsegundos, el radio de una de las ondas es 40t cm, encuentre la razón de cambio con respectoa t del área del círculo formado por la onda en t = 1.
Solución.
r
5.5. LA DERIVADA COMO RAZÓN DE CAMBIO 187
Se tiene r = r(t) = 40t, por tanto el área en cualquier instante t está dado por:
A = πr2
LuegodA
dt= 2πr
dt
dt
Pero drdt= 40 (en cualquier instante t), además en t = 1, se tiene r = 40, por tanto:
dA
dt= 2π (40) (40)
= 3200π cm2/seg.
Ejercicio 5.20 Dos automóviles parten simultáneamente desde un punto A. Uno de ellos sedirige hacia el oeste a 60 km/h, y el otro se dirige hacia el norte a 35 Km/h. ¿A que velocidadaumenta la distancia entre ambos 3 horas después?.
Solución. Sea x la distancia recorrida por el primer automovil en un tiempo t, y ladistancia recorrida por el segundo automovil en un tiempo t, es claro que x = x (t) y y = y (t),entonces
dx
dt= 60 (1)
ydy
dt= 35 (2)
La distancia entre los dos vehículos es
D =√x2 + y2.
luego
dD
dt=xdx
dt+ y
dy
dt√x2 + y2
de (1) deducimos que en 3 horas el automovil recorrerá x = 3 (60), similarmente de (2)deducimos que el automovil en 3 horas recorrerá y = 3 (35). Por tanto
dD
dt=
3 (60) 60 + 3 (35) 35√(3 (60))2 + (3 (35))2
= 5√193
lo anterior nos dice que la distancia entre los automóviles crece a razón de 5√193 Km/h.
188 CAPÍTULO 5. APLICACIONES DE LA DERIVADA (EN PRUEBA)
Ejercicios propuestos
1. Un globo se eleva de la tierra desde una distancia de 100 m respecto de un observador,a razón de 50 m/min. ¿Con que rapidez crece el ángulo de elevación de la línea que uneal observador con el globo cuando éste está a una altura de 100 m.?.
2. Un avión vuela horizontalmente a una altura de 4400 m. alejándose respecto a unobservador. Cuando el ángulo de elevación es π/4, el ángulo decrece a razón de 0.05rad/seg. ¿Cuán es la rapidéz del avión en ese instante?.Sol.: 440 pies/seg.
3. Una torre está al final de una calle Un hombre va en un automovil hacia la torre arazón de 50 m/seg. La torre tiene 500 m de altura. ¿con que rapidéz crece el ángulosubtendido por la torre y el ojo del hombre cuando éste se encuentra a 1000 m de latorre?.Sol.: 0, 02 rad/seg.
4. Un carro de la policia se aproxima a una intersección a 80 pies/seg. Cuando está a200 pies de este punto, un carro cruza la intersección, viajando en ángulo recto conrespecto a la dirección en que viaja el carro de la policia, a al velocidad de 60 pies/seg.Si el policia dirige el rayo de luz de su faro hacia el segundo carro, ¿con que velocidadgirará el rayo de luz 2 segundos después, suponiendo que ambos carros mantengan susvelocidades originales?.
5. Un peso es jalado a lo largo de un piso horizontal mediante una cuerda que pasa porun gancho situado a 6 pies sobre el piso. Si la cuerda es jalada sobre el gancho a lavelocidad de 1 pie/seg, encontrar una expresión para la razón de cambio del ángulo θ,formado por la cuerda y el piso, como función del ángulo θ.
Sol.:dθ
dt= 1
6sen θ tan θ.
6. Un hombre parado en un punto fijo de un muelle, jala un pequeño bote. El muelle estáa 20 pies sobre el nivel del agua. Si el hombre jala la cuerda a 2 pies/seg, ¿con quevelocidad crecerá el ángulo que la cuerda forma con el agua, cuando la distancia desdeel hombre hasta el bote sea de 50 pies?.
7. Un helicóptero despega a 1000 pies de un observador y se eleva verticalmente a 20pies/seg. ¿A que velocidad cambiará el ángulo de elevación del helicóptero respecto alobservador cuando el helicóptero esté a 800 pies sobre el suelo?.
Sol.:1
82rad/seg.
8. Supóngase que se filtra un líquido a partir de un resíduo sólido en un filtro cónico de60 cm de radio y 20 cm de altura. ¿Con que rapidéz cambia el nivel del líquido en elfiltro si se introduce tal líquido a razón de 5 cm3/min?. (Sug. Considere el cono con elvértice hacia abajo).
Sol.:dh
dt=
−59πh2
.
5.6. LÍMITES INDETERMINADOS 189
9. El costo que tiene una compañia al fabricar x relojes eléctricos por mes es
c (x) = 15000 + 5x
dólares. El precio está determinado por la demanda y está dado por la ecuación
p (x) = 15− x
10000,
donde x es el número de relojes fabricados y vendidos por més. Hallar la rapidéz decambio con respecto al tiempo del costo, del ingreso y de la utilidad por mes, consi-derando que se aumenta la producción en 5000 relojes al mes y que ahora es de 20000relojes mensuales.Sol.: $25000/mes, $55000/mes, $30000/mes.
5.6 Límites Indeterminados
En esta sección, se usan derivadas en el cálculo de límites para algunos casos particularesconocidos como indeterminaciones.
5.6.1 La indeterminación 00
Diremos que un límite es del caso 00si en el límite
limx→a
f (x)
g (x)
se cumple limx→a
f (x) = 0 y limx→a
g (x) = 0. Iniciamos este estudio con el siguiente teorema.
Teorema 5.16 (Regla de L’Hopital)
(1) Sean f, g : [a, b] → R, continuas en [a, b] tales que f ′ y g′ existen para x ∈ (a, b), cong′(x) �= 0. Supóngase que
limx→a
f (x) = 0, limx→a
g (x) = 0, y limx→a
f ′ (x)
g′ (x)= L
entonces:
limx→a
f (x)
g (x)=limx→a
f ′ (x)
g′ (x)= L.
(2) Sean f, g funciones definidas para valores x suficientemente grandes tales que f ′ y g′
existen en el dominio común de f y g. Si g′(x) �= 0 y
limx→∞
f (x) = 0, limx→∞
g (x) = 0, y limx→∞
f ′ (x)
g′ (x)= L
entonces:
limx→∞
f (x)
g (x)= limx→∞
f ′ (x)
g′ (x)= L.
190 CAPÍTULO 5. APLICACIONES DE LA DERIVADA (EN PRUEBA)
(3) Sean f, g funciones definidas para valores −x suficientemente grandes tales que f ′ y g′
existen en el dominio común de f y g. Si g′(x) �= 0 y
limx→−∞
f (x) = 0, limx→−∞
g (x) = 0, y limx→−∞
f ′ (x)
g′ (x)= L
entonces:
limx→−∞
f (x)
g (x)= limx→−∞
f ′ (x)
g′ (x)= L.
Demostración. Se demuestra la parte (1). Las partes (2) y (3) quedan comoejercicio.
(1) Sea x ∈ (a, b). Las hipótesis del Teorema de Cauchy se satisfacen en el intervalo [a, x],luego existe c ∈ (a, x) tal que:
f (x)− f (a)g (x)− g (a) =
f ′ (c)
g′ (c)
puesto que f y g son continuas y limx→a
f (x) = 0, limx→a
g (x) = 0 se tiene f (a) = g (a) = 0.
Con estas consideraciones:f (x)
g (x)=f ′(c)
g′(c)
Claramente si x→ a, entonces debe verificarse c→ a, luego
limx→a
f (x)
g (x)=limc→a
f ′(c)
g′(c)=limx→a
f ′(x)
g′(x)= L.
(2) Sug. Considere limu→0+
f (1/u)
g (1/u).
�
(Nótese que para cualquier función h se verifica: limx→a
claramente es una indeterminación 00. Se cumplen también hipótesis de la Regla de L’Ho-
pital, luego:
limx→2
f (x)
g (x)= lim
x→2
f ′ (x)
g′ (x)
= limx→2
6x+ 2
2x− 1=
14
3.
5.6. LÍMITES INDETERMINADOS 191
Ejercicio 5.22 Calcular limx→0
x− tan xx− sin x .
Solución. Nuevamente es un caso 00. Por la Regla de L’Hopital con
f (x) = x− tan x, y g (x) = x− sin x
tenemos:
limx→0
f (x)
g (x)= lim
x→0
f ′ (x)
g′ (x)
= limx→0
1− sec2 x1− cosx
el último límite encontrado es nuevamente un caso 00, aplicamos muevamente la regla de L’
Hopital
limx→0
f (x)
g (x)= lim
x→0
1− sec2 x1− cosx
= limx→0
−2 secx (secx tan x)sinx
=limx→0
−2 sec3 x
= −2.
Ejercicio 5.23 Calcular limx→0
1− e5√x
√x+ x
.
Solución. En este ejercicio conviene hacer un cambio de variable. Sea u =√x, con este
cambio el límite dado queda
limx→0
1− e5√x
√x+ x
=limu→0
1− e5uu+ u2
.
Aplicando la regla de L’ Hopital:
limu→0
1− e5uu+ u2
=limu→0
−5 e5u1 + 2u
= −5.
Ejercicio 5.24 Calcular limx→0
arcsin 2x− 2 arcsin xx3
.
Solución. Aplicando la regla de L’ Hopital:
limx→0
arcsin 2x− 2 arcsin xx3
=2
3limx→0
(1− 4x2)−1/2 − (1− x2)−1/2x2
=1
3limx→0
4(1− 4x2
)−3/2 −(1− x2
)−3/2
= 1.
(En este ejercicio se ha aplicado la regla de L’ Hopital dos veces).
192 CAPÍTULO 5. APLICACIONES DE LA DERIVADA (EN PRUEBA)
Ejercicio 5.25 Calcular limx→π
2
ln (− cos 2x)1 + cos 2x
.
Solución. Notemos que cos (π) = −1. Aplicando la regla de L’ Hopital encontramos:
limx→π
2
ln (− cos 2x)1 + cos 2x
= limx→π
2
2 sin 2x
− cos 2x−2 sin 2x
= limx→π
2
1
cos 2x
= −1.
Ejercicio 5.26 Calcular limx→∞
π
2− arctan x
sin1
x
.
Solución.
limx→∞
π
2− arctan x
sin1
x
= limx→∞
− 1
1 + x2(cos1
x
)(− 1x2
)
= 1.
Ejercicio 5.27 Calcular limx→∞
1(π2− arctanx
)x.
Solución. El límite dado se escribe como: limx→∞
1
x(π2− arctan x
) que es una indetermina-
ción 00, aplicamos entonces la regla de L’ Hopital:
limx→∞
1x(π
2− arctan x
) = limx→∞
− 1x2
− 1
1 + x2
= 1.
5.6.2 La indeterminación ∞∞
En este caso aplicamos el siguiente teorema que es una extensión de la regla de Hopital.
Teorema 5.17 (Regla de L’Hopital para el caso∞∞). Sean f y g definidas y diferen-
ciables para todo x mayor que un entero fijo. Supóngase que
limx→∞
f (x) =∞, limx→∞
g (x) =∞, y limx→∞
f ′ (x)
g′ (x)= L
entonces:
limx→∞
f (x)
g (x)= limx→∞
f ′ (x)
g′ (x)= L
Observación. El teorema sigue siendo válido si reemplazamos x→∞ por x→ a.
5.6. LÍMITES INDETERMINADOS 193
Ejercicios resueltos
Ejercicio 5.28 Calcular limx→∞
ln x
x.
Solución.
limx→∞
ln x
x= lim
x→∞
1/x
1= 0.
Ejercicio 5.29 Calcular limx→∞
xn
ex, donde n es un número natural.
Solución.
limx→∞
xn
ex= lim
x→∞
nxn−1
ex
= limx→∞
n (n− 1) xn−2ex
= . . .
= limx→∞
n!
ex= 0
Ejercicio 5.30 Calcular limx→∞
cosh (x+ 1)
ex.
Solución. Por definición
cosh (x+ 1) =1
2
(ex+1+e−x−1
)
luego
limx→∞
cosh (x+ 1)
ex= 1
2limx→∞
ex+1+e−x−1
ex
= 12limx→∞
(e+ e−2x−1)
=e
2.
En el anterior ejercicio no se emplea la regla de L’ Hopital, si se emplera, nunca prodríamosromper la indeterminación. Asi pues, en algunos casos la regla de Hopital no dá ningúnresultado.
Ejercicio 5.31 Calcular limx→π/2−
tan x
ln cosx.
Solución.
limx→π/2−
tan x
ln cosx= lim
x→π/2−
sec2 x− sin xcosx
= − limx→π/2−
secx
sin x= −∞.
194 CAPÍTULO 5. APLICACIONES DE LA DERIVADA (EN PRUEBA)
Ejercicio 5.32 Calcular limx→0
cot 2x
cot 4x.
Solución. Este límite es del caso ∞∞ , luego aplicando la regla de L’Hopital:
limx→0
cot 2x
cot 4x= lim
x→0
−2 csc2 (2x)−4 csc2 (4x)
podemos observar que el nuévo límite es otra vez del caso ∞∞ . Si seguimos aplicando L’Hopital
seguiremos obteniendo indefinidamente el caso ∞∞ , es decir, el límite no pierde su calidad de
indefinida. Sin embargo con una pequeña modificación podremos resolver el problema, enefecto:
limx→0
cot 2x
cot 4x= lim
x→0
tan 4x
tan 2x= lim
x→0
4 sec2 4x
2 sec2 2x= 2
5.6.3 Indeterminaciones 0 · ∞ e ∞−∞Estos casos se reducen a uno de los casos estudiados arriba.
Ejercicios resueltos
Ejercicio 5.33 Calcular limx→0
(1
x− 1
ex−1
).
Solución. Es un caso ∞−∞.
limx→0
(1
x− 1
ex−1
)= lim
x→0
(ex−1− xx (ex−1)
)
el límite de la derecha es del tipo 00. Aplicando Hopital tenemos
limx→0
(1
x− 1
ex−1
)= lim
x→0
ex−1ex−1 + x ex
= limx→0
ex
2 ex+x ex
= 12
Ejercicio 5.34 limx→1
(1
lnx− x
x− 1
).
Solución. Es un caso ∞−∞
. limx→1
(1
ln x− x
x− 1
)= lim
x→1
x− 1− x ln x(x− 1) ln x
este último límite es del tipo 00. Aplicando dos veces la regla de L’ Hopital:
limx→1
(1
ln x− x
x− 1
)= lim
x→1− ln x
ln x+(x− 1)x
= limx→1
− x ln x
x ln x+ x− 1
5.6. LÍMITES INDETERMINADOS 195
nuevamente el último límite es del tipo 00, aplicando otra vez la regla de L’ Hopital:
limx→1
(1
lnx− x
x− 1
)= − lim
x→1
1 + lnx
1 + ln x+ 1
= −12
Ejercicio 5.35 limx→0(x− arcsin x) csc3 x.
Solución. Es del caso 0 · ∞.
limx→0(x− arcsin x) csc3 x = lim
x→0
(x− arcsin x)sin3 x
(tipo 00)
= limx→0
1− 1√1− x2
3 sin2 x cosx
= limx→0
(1− x2)1/2 − 13 (1− x2)1/2 sin2 x cosx
el resultado encontrado es nuevamente del tipo 00, aplicando una vez más la regla de L’
Hopital encontramos:
limx→0(x− arcsinx) csc3 x = −1
6
5.6.4 Casos 00, ∞0, 1∞
Ejercicios resueltos
En este caso se toma el logaritmo natural y entonces se transforma el límite dado a la forma0 · ∞.
Ejercicio 5.36 Calcular limx→0
xx.
Solución. Es del caso 00. Sabemos que ln xx = x ln x, calculamos ahora el límite
limx→0
x ln x
éste límite es de la forma 0 · ∞ que se puede transformar al caso 00o∞∞ .
limx→0
x ln x = limx→0
ln x
1/xtipo
∞∞
= limx→0
1/x
−1/x2 = limx→0−x= 0
196 CAPÍTULO 5. APLICACIONES DE LA DERIVADA (EN PRUEBA)
de este resultado encontramos:
limx→0
xx = limx→0ex lnx
= elimx→0
x lnx
= e0 = 1
Ejercicio 5.37 Calcular limx→0(1− 2x)1/x.
Solución. Es del caso 1∞. Calculamos el límite limx→0ln (1− 2x)1/x = lim
x→0
1
xln (1− 2x), este
es un caso ∞ · 0.
limx→0
1
xln (1− 2x) = lim
x→0
ln (1− 2x)11/x
, caso 00
= limx→0
−21− 2x1
= −2,
Con este resultado:limx→0(1− 2x)1/x = lim
x→0e1
xln(1−2x)
= elimx→0
1
xln(1−2x)
= e−2 .
Ejercicio 5.38 Calcular limx→−π/2−
(tan x)cos x.
Solución. Es del caso ∞0, inicialmente calculamos el siguiente límite
limx→−π/2−
cos x (ln tan x) = limx→−π/2−
ln tan x
secx
= limx→−π/2−
sec2 x
tan xsecx tan x
= limx→−π/2−
cosx
sin2 x= 0
de esto se deduce:
limx→−π/2−
(tan x)cos x = elim
x→−π/2−cos x(ln tanx)
= e0 = 1.
5.6. LÍMITES INDETERMINADOS 197
Ejercicios propuestos
Calcular:
1. limx→0(cos 2x)
3
x2 Sol.: e−6.
2. limx→0
tan x− xx− sinx Sol.: 2.
3. limx→π/2
ln sin x
(π − 2x)2Sol.:−1
8.
4. limθ→0
θ − arcsin θsin3 θ
Sol.:−16.
5. limy→0
ey +cos y − 2ln (1 + y)
Sol.:1.
6. limy→0
ey +sin y − 1ln (1 + y)
Sol.:2.
7. limφ→π
4
sec2 φ− 2 tanφ1 + cos 4φ
Sol.: 12.
8. limy→0
tan y − sin ysin3 y
Sol.: 12
9. limx→2
√16x− x4 − 2 3
√4x
2−√√
2x3Sol.: 32
9
10. limx→3
√3x−
√12− x
2x− 3√19− 5x Sol.: 8
69
11. limx→a
xp − apxq − aq , a > 0, p, q ∈ N. Sol.: p
qap−q.
12. limx→0
x cosx− sin xx3
Sol.: −13.
13. limx→0
x− sin xx3
Sol.:16.
198 CAPÍTULO 5. APLICACIONES DE LA DERIVADA (EN PRUEBA)
200 CAPÍTULO 5. APLICACIONES DE LA DERIVADA (EN PRUEBA)
47. limx→∞
(7x+ 1)x−3
= e7.
48. limx→2(x/2)
1
2−x = e−1
2 .
49. limx→∞
(cos(5x
)x2)= e−
25
2 .
50. limx→0(1− cosx) x
x−1 = 1.
51. limx→0
(3x − 4x5x − 6x
)= ln 3−ln 4
ln 5−ln 6
52. limx→0
(etanx − ex
x3
)= 1
3
53. limx→0+
(xe
1
x
)=∞
54. limx→0
(1
x2− cot2 x
)= 2
3
5.7 Trazado de curvas algebraicas
Con los resultados relativos a límites, máximos, mínimos y concavidad de las funciones, másalgunas definiciones que se dan en esta sección se puede dibujar con bastante precisión elgráfico de curvas algebraicas, con este propósito pondremos especial interés en los siguientesaspectos:
1. Simetria.
2. Intersecciones con los ejes.
3. Campo de variación.
4. Comportamiento cuando x tiende a infinito o menos infinito.
5. Asíntotas verticales, horizontales y oblicuas.
6. Puntos críticos y de inflexión.
7. Regiones de crecimiento y decrecimiento.
8. Máximos y mínimos.
9. Concavidad, esto nos dice como va doblándose la curva.
Aunque la técnica para dibujar cualquier función es siempre la misma, en esta secciónpondremos énfasis en graficar curvas algebraicas de la forma.
ayn + (bx+ c) yn−1 +(dx2 + ex+ f
)yn−2 + · · ·+ pn (x) = 0,
donde pn (x) es un polinomio de grado n.
5.7. TRAZADO DE CURVAS ALGEBRAICAS 201
5.7.1 Simetría
Una curva es simétrica con respecto:
1. Al eje x si su ecuación no varia al cambiar y por −y
2. Al eje y si su ecuación no varia al cambiar x por −x.
3. Al origen si la ecuación no cambia al cambiar x por −x y y por −y simultáneamente.
4. A la recta y = x si la ecuación no cambia al intercambiar x por y.
Ejemplo 5.6 xy4 + xy2 − 1 = 0 es simétrica respecto del eje x pero no respecto del eje y.
�X
Y �
xy4 + xy2 − 1 = 0
En el caso de funciones se tiene la siguiente definición de simetria.
Definición 5.18 (Funciónes pares e impares) Una función f es par si para todo x,−x ∈Df se verifica f (x) = f (−x) . Una función f es impar si para todo x,−x ∈ Df se verificaf (−x) = −f (x) .
Ejemplo 5.7 Sea f : R→ R, definida por f (x) = x2 (x2 − 4) , sea x ∈ R, entonces:
f (−x) = (−x)2((−x)2 − 4
)
= x2 (x2 − 4)= f (x)
202 CAPÍTULO 5. APLICACIONES DE LA DERIVADA (EN PRUEBA)
por tanto f (−x) = f (x) , esto es, la función f es par.
�
�X
Y
−2 2
10
−4
f(x) = x2(x2 − 4)
La ventaja de reconocer que una función sea par, radica en el hecho de que es suficientegraficar la función en la parte positiva del dominio, pues para graficar en la parte negativa sehace simplemente una reflexión del gráfico ya trazado con respecto al eje Y.
Ejemplo 5.8 Sea f : R→ R, definida por f (x) = x3 − 4x, sea x ∈ R, entonces:
por tanto f (−x) = −f (x) , esto es, la función f es impar.
�
�X
Y
−2 2
10
−4
f(x) = x3 − 4x
nuevamente, se tiene una ventaja al reconocer una función impar, una vez que se ha trazadola gráfica en la parte positiva, se hace una reflexión con respecto al origen para obtener lagráfica en la parte negativa.
5.7. TRAZADO DE CURVAS ALGEBRAICAS 203
Muchas funciones no son pares ni impares, por ejemplo x3 − x2, no es par ni impar, sinembargo está formado por partes pares e impares, su parte par es −x2, y su parte impar x3.En general si f es una función su parte par está dado por:
u (x) =f (x) + f (−x)
2
y su parte impar por:
v (x) =f (x)− f (−x)
2es claro que f (x) = u (x) + v (x) .
Ejemplo 5.9 Sea f (x) = ex, la parte par de f es u (x) = 12(ex + e−x) y su parte impar es
v (x) = 12(ex − e−x) .
Ejercicios resueltos
1. Clasificar las siguientes curvas (simetrías)
(a) x3y + x2y2 + xy = 1
(b) x2y4 + x2y2 = 1
2. Clasificar (decir si son pares o impares) las funciones definidas por
(a) f (x) = x2 + x sin x
(b) g (x) = x2 + sinx
(c) h (x) = tan (x) + cosx
(d) f (x) = x3 sinx− cosx(e) s (x) = ln (x)
(f) u (x) = ex+ ln x
3. Hallar las partes pares e impares de:
(a) f (x) = ex+sin x
(b) g (x) = tan x+ x2
(c) h (x) = 5x4 + 4x3 + 3x2 + 2x+ 1
4. Demostrar que la suma de funciones pares (impares) es par (impar).
5. Demostrar que el producto de una función par con una impar es impar.
6. Demostrar que el producto de funciones impares es par.
7. Demostrar que el producto de una función par con una par es par.
8. Demostrar que la división de una función par con una par es par.
9. Demostrar que la división de una función par con una impar es impar.
204 CAPÍTULO 5. APLICACIONES DE LA DERIVADA (EN PRUEBA)
5.7.2 Intersecciones con los ejes
Sea C una curva definida implícitamente por una expresión algebraica en las variables x, y.La intersecciones con el eje X se encuentran haciendo y = 0. Similarmente las interseccionescon el eje Y se encuentran haciendo x = 0.
Ejemplo 5.10 Hallar las intersecciones con los ejes de la función definida implícitamente por
(x− 2)(x2 − 9
2y2)= 9
• (Intersección con el eje X). Haciendo y = 0, tenemos x2 (x− 2)− 9 = 0, cuya únicasolución real es: x = 3, es decir, la gráfica de la función corta al eje X en el punto 3,dicho de otra manera, el gráfico pasa por el punto (3, 0).
• (Intersección con el eje Y). Haciendo x = 0, tenemos y2 − 1 = 0, las soluciones sony = −1 y y = 1, es decir, la gráfica corta al eje Y en el punto −1 y 1, dicho de otramanera, el grafico pasa por (0,−1) y (0, 1) .
Ejercicios propuestos
En los siguientes ejercicios calcular las intersecciones con los ejes:
1. x2 + 2x+ y2 = 0Sol.: Eje X : x = 0, x = −2. Eje Y : y = 0.
2. (x− 2)2 + (3y − 5)2 = 9Sol.: Eje X : no existen, Eje Y : y = 1
3
(5±
√5).
3. (x− 2)2 + (y − 5)2 = 25Sol.: Eje X : x = 2 Eje Y : y = 5 +
√21, y = 5−
√21.
4. y (x2 − 1) = x− 2,Sol.: Eje X : x = 2, Eje Y : y = 2.
5. x2y2 + xy − 2x+ y = 2.Sol.: Eje X : x = −1, eje Y : y = 2.
5.7.3 Campo de variación
Si (x, y) es un punto de la gráfica de una función:
• El campo de variación en el eje X es el conjunto
VX = {x ∈ R : y existe}
• El campo de variación en el eje Y es el conjunto
VY = {y ∈ R : x existe}
5.7. TRAZADO DE CURVAS ALGEBRAICAS 205
Ejemplo 5.11 Hallar los campos de variación de la curva dada por
x2 − 2x+ y2 + 6y = 6.
Despejando x e y encontramos
y = −3±√16− (x− 1)2
x = 1±√16− (y + 3)2
podemos observar que y existe si y solamente si
16− (x− 1)2 ≥ 0,
resolviendo la desigualdad encontramos −3 ≤ x ≤ 5, así el campo de variación de x es elintervalo Vx = [−3, 5] . Similarmente podemos observar que x existe si y solamente si
16− (y + 3)2 ≥ 0,
resolviendo ésta desigualdad encontramos que el campo de variación de y es el intervaloVy = [−7, 1] .
5.7.4 Comportamiento cuando x→ −∞ y x→∞Si tenemos una función f definida para números suficientemente ”lejos” de 0, obtenemosinformación sustancial investigando como se comporta la función cuando x→ −∞ o cuandox → ∞. El comportamiento de muchas funciones ya se sabe, así sin x se comporta en formaoscilante, sin embargo no todas las funciones tienen ese comportamiento. En esta sección viaejemplos veremos el comportamiento de algunas funciones.
Ejemplo 5.12 Consideremos el polinomio f definido por
f (x) = x2 − 2x+ 5,
este polinomio se puede escribir en la siguiente forma
f (x) = x2(1− 2
x+5
x2
).
observemos que :
limx→∞
(1− 2
x+5
x2
)= 1
limx→∞
x2 = ∞
esto nos dice que el comportamiento de f (x) cuando x→∞ es parecido al comportamientode x2, esto es, f (x)→∞ cuando x→∞. De modo similar podemos concluir que f (x)→∞cuando x→ −∞
206 CAPÍTULO 5. APLICACIONES DE LA DERIVADA (EN PRUEBA)
Observación. Con un argumento análogo al anterior podemos discutir el comportamientode cualquier polinomio.
Ejemplo 5.13 Consideremos la función:
f (x) =x2 − 1x2 − 2x
dividiendo numerador y denominador por x2:
f (x) =1− 1/x21− 2/x
es claro que:limx→∞
f (x) = 1
así cuando x→∞, f (x)→ 1.Demanera similar podemos mostrar que si x→ −∞, f (x)→ 1.Geométricamente esto significa que los puntos f (x) tales que x es un número mucho mayorque cero y números x mucho menores que cero están cerca del la recta y = 1.
5.7.5 Asíntotas
Estudiaremos la asíntotas de la curva dada por:
ayn + (bx+ c) yn−1 +(dx2 + ex+ f
)yn−2 + · · ·+ pn (x) = 0, (i)
Sea (x, f (x)) un punto de la curva, entonces:
• Una recta dada por x = a, es llamada una Asíntota Vertical si |f (x)| toma valoresarbitrariamente grandes cuando x→ a por la derecha y por la izquierda.
• Una recta dada por y = a, es llamada Asíntota Horizontal si la diferencia
f (x)− a→ 0
para valores de x arbitrariamente grandes positiva o negativamente.
• Una recta dada por y = mx+ b es una Asíntota oblicua si la diferencia
f (x)−mx− b→ 0
para valores de x arbitrariamente grandes positiva o negativamente.
Para calcular las asíntotas procedemos de la siguiente manera
• Cálculo de las asíntotas verticales. La curva (i) tiene asíntotas verticales si elcoeficiente a de yn es función de la variable x. A cada factor lineal de la forma (x− a)le corresponde una asíntota vertical x = a.
5.7. TRAZADO DE CURVAS ALGEBRAICAS 207
• Calculo de las asíntotas horizontales. Escribimos (i) en la forma
axn + (by + c)xn−1 +(dy2 + ey + f
)xn−2 + · · ·+ qn (y) = 0, (ii)
si a es función de la variable y. A cada factor lineal de la forma (y − a) le correspondeuna asíntota horizontal y = a.
• Cálculo de las asíntotal oblicuas. Se sustituye y por mx+ b en la ecuación (i) paraobtener
anxn + an−1x
n−1 + · · ·+ a1x+ a0 = 0. (iii)
Resolvemos ahora el sistemaan = 0an−1 = 0
del anterior sistema encontramos los valores de m y b. Para cada par de valores m, btenemos la asíntota oblicua y = mx+ b.Si an−1 = 0 se resuelve el sistema
an = 0
an−2 = 0.
Ejemplo 5.14 Encontraremos las asíntotas de la curva definida por
y2 − x2 + xy2 = 0• Asíntotas verticales. Escribimos la ecuación en la siguiente forma
(x+ 1) y2 − x2 = 0,observamos que el coeficiente de mayor potencia de y es (x+ 1), de esto concluimos quetenemos una asíntota vertical en x+ 1 = 0, esto es x = −1.
• Asíntotas horizontales. Escribimos la ecuación en la forma
−x2 + xy2 + y2 = 0,observamos que el coeficiente de mayor potencia de x no es una función de y y por tantono tiene factores lineales en la variable y. De esto concluimos que no existen asíntotashorizontales.
• Asíntotas oblicuas. Reemplazamos y por mx + b en la ecuación dada obteniendosucesivamente:
(mx+ b)2 − x2 + x (mx+ b)2 = 0
m2x2 + 2mxb+ b2 − x2 + x(m2x2 + 2mxb+ b2
)= 0
m2x2 + 2mxb+ b2 − x2 +m2x3 + 2mbx2 + b2x = 0
m2x3 +(m2 + 2mb− 1
)x2 +
(2mb+ b2
)+ b2 = 0
de la última ecuación encontramos el sistema
m2 = 0
m2 + 2mb− 1 = 0,
este sistema no tiene solución, esto prueba que la curva no puede tener asíntotas oblicuas.
208 CAPÍTULO 5. APLICACIONES DE LA DERIVADA (EN PRUEBA)
Ejercicios resueltos
Ejercicio 5.39 Estudiar y representar la curva dada por
x3 − x2y + y = 0 (i)
Solución. Seguiremos todos los pasos dados en esta sección para representar la curva.
1. Simetria. Reemplazando y por −y obtenemos x3 + x2y − y = 0 que naturalmente noes igual a la ecuación (i), por tanto la curva no es simétrica respecto al eje x. Podemosprobar que no es simétrica respecto al eje y, podemos probar también que la curva essimétrica respecto del origen.
Por otra parte despejando y encontramos:
y = f (x) =x3
x2 − 1Reemplazando −x por x :
f (−x) = (−x)3
(−x)2 − 1= − x3
x2 − 1 = −f (x)
Lo anterior muestra que y = f (x) es impar.
2. Intersecciones. Haciendo y = 0, la ecuación (i) se reduce a:
x3 = 0
cuya solución es x = 0.Haciendo x = 0, la ecuación (i) se reduce a
y = 0
cuya solución es y = 0. De lo anterior concluimos que las intersecciones son:
• Con el eje X : x = 0.
• Con el eje Y : y = 0.Por tanto la curva pasa por el punto (0, 0) .
3. Campo (rango) de variación. De (i) despejando y encontramos:
y =x3
x2 − 1 .
El rango de variación de x esta formado por los números x para los cuales y existe, estose da cuando x �= 1 y x �= −1, es decir cuando x ∈ R−{1,−1} (Los reales menos losnúmeros 1 y −1).Por otra parte la ecuación x3− x2y+ y = 0, considerado como polinomio de grado 3 enla variable x siempre tiene al menos una raíz real cualquiera sea el valor de y, de estodeducimos que el rango de variacíon de y es R.
5.7. TRAZADO DE CURVAS ALGEBRAICAS 209
4. Comportamiento cuando x→∞ y x→ −∞. Calculamos los siguientes límites:
• limx→∞
x3
x2 − 1 =∞.
• limx→−∞
x3
x2 − 1 = −∞.
5. Asíntotas.
• Asíntotas verticales. Escribimos la ecuación dada como:(−x2 + 1
)y + x3 = 0
igualamos a cero el coeficiente de la potencia más alta de y, y encontramos
−x2 + 1 = 0,
de esto deducimos que la curva tiene asíntotas en x = −1 y x = 1. Para realizarel gráfico observamos el comportamiento de f a la izquierda y a la derecha de losanteriores puntos.
limx→−1−
x3
x2 − 1 = −∞
limx→−1+
x3
x2 − 1 = ∞
limx→1−
x3
x2 − 1 = −∞
limx→1+
x3
x2 − 1 = ∞
Asíntotas horizontales. La ecuación dada es
x3 − x2y + y = 0,
observamos que el coeficiente de mayor grado de x es 1(una constante), luego lacurva no tiene asíntotas horizontales.
• Asíntotas oblicuas. En la ecuación (i) reemplazamos y por mx + b obteniendosucesivamente:
x3 − x2 (mx+ b) +mx+ b = 0
(1−m)x3 + (−b) x2 +mx+ b = 0.
De la última ecuación resulta el siguiente sistema:
1−m = 0
−b = 0
resolviendo tenemos m = 1 y b = 0. Por tanto la única asíntota oblicua es y = x.
210 CAPÍTULO 5. APLICACIONES DE LA DERIVADA (EN PRUEBA)
6. Puntos críticos. Derivando:
f (x) =x3
x2 − 1 ,
tenemos:
f ′ (x) =3x2 (x2 − 1)− x3 (2x)
(x2 − 1)2
=x2 (x2 − 3)(x2 − 1)2
Resolviendo f ′ (x) = 0 encontramos x = 0, x = −√3 y x =
√3, luego el conjunto de
puntos críticos es: {0,−
√3,√3,−1, 1
}.
Observación. Los puntos −1 y 1 son puntos críticos pues en esos puntos f ′ no estádefinida.
7. Regiones de crecimiento y decrecimiento. Se calcula el signo de la derivada de f.Recordemos que la derivada es:
f ′ (x) =x2 (x2 − 3)(x2 − 1)2
.
Observamos que el denominador (si x �= ±1) es siempre un número positivo, luego essuficiente analizar el numerador x2 (x2 − 3) . Un simple cálculo algebraico muestra que
x2(x2 − 3
)es{≥ 0 si x ∈
(−∞,−
√3]∪[√3,∞
)
≤ 0[−√3,√3]− {−1, 1} ,
de esto concluimos:
• f es creciente en(−∞,−
√3]∪[√3,∞
).
• f es decreciente en[−√3,√3]. Está claro que excluimos los puntos −1 y 1.
8. Máximos y mínimos locales. Con los resultados correspondientes a crecimientopodemos concluir con lo siguiente:
• f pasa de creciente a decreciente en −√3, luego f tiene un máximo local en x =
−√3.
• f pasa de decreciente a creciente en√3, luego f tiene un mínimo local en x =
√3.
• Alrededor de x = 0 la función es decreciente y por tanto no podemos afirmar queen x = 0 se tenga o no un máximo o mínimo local.
9. Máximos y mínimos absolutos (globales). No existen pues si x→∞, f (x)→∞y si x→ −∞ se tiene f (x)→ −∞.
5.7. TRAZADO DE CURVAS ALGEBRAICAS 211
10. Concavidad. La segunda derivada es
f ′′ (x) =2x (x2 + 3)
(x2 − 1)3.
Se observa que en x = 0 se tiene f ′′ (0) = 0, de este hecho concluimos que f tiene unpunto de inflexión en x = 0 (La concavidad cambia alrededor del cero). Se observaademás que:
• f ′′ (x) < 0 en (−∞, 1) , luego f es cóncava hacia abajo en (−∞, 1) .• f ′′ (x) > 0 en (−1, 0), luego f es cóncava hacia arriba en (−1, 0) .• f ′′ (x) < 0 en (0, 1) , luego f es cóncava hacia abajo en (0, 1) .
• f ′′ (x) > 0 en (1,∞) , luego f es cóncava hacia arriba en (1,∞) .
11. Gráfica de la función. Toda la información obtenida hasta ahora nos permite bos-quejar la curva.
�
�X
Y
−2 2
10
−4
f(x) = x3
x2−1
Ejercicio 5.40 Estudiar y representar la curva dada por
y3 (x− 1) = x. (i)
Solución. Nuevamente seguiremos todos los pasos dados en esta sección para representarla curva.
1. Simetria. La curva no es simétrica a ninguno de los ejes.
2. Intersecciones con los ejes. Haciendo y = 0, obtenemos
x = 0.
Haciendo x = 0 obtenemosy = 0.
Así, los puntos de intersección son
212 CAPÍTULO 5. APLICACIONES DE LA DERIVADA (EN PRUEBA)
• Con el eje X : x = 0.
• Con el eje Y : y = 0.Esto muestra que la curva pasa por (0, 0) .
3. Campo de variación. Despejando y de la ecuación (i):
y = 3
√x
x− 1 ,
de donde deducimos que el campo de variación de x es el conjunto R − {1} . Por otraparte despejando x encontramos
x =y3
y3 − 1 ,
de donde deducimos que el campo de variación de y es R− {1} .4. Comportamiento cuando x→ ±∞. Calculamos los siguientes límites:
• limx→∞
3
√x
x− 1 = 1 y
• limx→∞
3
√x
x− 1 = 1
5. Asíntotas.
• Asíntotas verticales. Se escribe la expresión dada como un polinomio en la variabley
y3 (x− 1) = x,
igualando a cero el coeficiente de más alta potencia tenemos
x− 1 = 0,de esto deducimos que la curva tiene una asíntota en x = 1. Para bosquejar elgráfico cerca el punto x = 1 calculamos los siguientes límites
limx→1−
3
√x
x− 1 = −∞
limx→1+
3
√x
x− 1 =∞
• Asíntotas horizontales. Se escribe la expresión dada como un polinomio en lavariable x
x(y3 − 1
)− y3 = 0,
el coeficiente de la más alta potencia es y3 − 1, igualando a cero tenemos
y3 − 1 = 0,resolviendo obtenemos y = 0 (la única solución real), de esto deducimos que lacurva tiene una asíntota horizontal en y = 1.
5.7. TRAZADO DE CURVAS ALGEBRAICAS 213
• Asíntotas oblicuas. Reemplazamos en (i) y por mx+ b obteniendo sucesivamente:
(mx+ b)3 (x− 1) = x,
desarrollando obtenemos
m3x4 −(m3 − 3m2b
)x3 −
(3mb2 − b3 − 1
)x− b3 = 0,
Igualando a 0 los coeficientes de más alta potencia tenemos
m3 = 0m3 − 3m2b = 0,
de lo anterior concluimos que m = 0, esto muestra que la curva dada no tieneasíntotas oblícuas.
6. Puntos críticos. Derivando
y = f (x) = 3
√x
x− 1 ,
obtenemosf ′ (x) = − 1
3 ( 3√x)2(
3√(x− 1)
)4 ,
al resolver y′ = 0, encontramos que no tenemos ninguna solución, es decir no tenemospuntos críticos de la forma f ′ (x) = 0. Sin embargo f ′ no está definida en x = 1, luegoel conjunto de puntos críticos es el conjunto unitario
{1} .
7. Regiones de crecimiento y decrecimiento. Del resultado anterior deducimos quela derivada y′ > 0 en toda la recta real (excepto x = 0 y x = 1), esto nos permiteconcluir que la curva es decreciente en (−∞, 1) y (1,∞) .
8. Máximos y mínimos locales y absolutos (globales). No existen
9. Concavidad. La segunda derivada es
f ′′ (x) =2
9
3x− 1( 3√x)5(
3√(x− 1)
)7 ,
resolviendo f ′′ (x) = 0, obtenemos x = 1/3, también podemos ver que la segundaderivada f ′′ no está definida en x = 0 y x = 1, de esto concluimos que el conjunto depuntos de inflexión es
{0, 1/3, 1}analizando los signos que asume f ′′ en los intervalos (−∞, 0) , (0, 1/3) , (1/3, 1) y (1,∞)tenemos respectivamente
214 CAPÍTULO 5. APLICACIONES DE LA DERIVADA (EN PRUEBA)
• (−∞, 0) : f ′′ < 0, luego en este intervalo f es concava hacia abajo.
• (0, 1/3) : f ′′ > 0, luego en este intervalo f es cócava hacia arriba.
• (1/3, 1) : f ′′ < 0, luego en este intervalo f es cócava hacia abajo.
• (1,∞) : f ′′ > 0, luego en este intervalo f es cócava hacia arriba.
10. Bosquejo del gráfico de la función.
�
�13
1
−2−1/3
1
Ejercicios propuestos
Estudiar y representar la curva dada por:
1. yx2 − y = −2x3.
2. (x− 2)2 y = 1.
3. y2 (x2 − 1) = (x2 + 1) .
4. (4− x2) y = x4.
5. x2 − y2 + 2y = 1.
6. y2 = (x− 1) (x+ 4) .
7. y3 = 4x2 (9− x2) .
8. (x2 + y2)2 = 8xy.
9. x3y3 = (x− 4)2 .
10. (x− 5) y2 = x2 (x− 4) .
11. y = ln (x2 − 9) .
12. (x2 − 9) y2 = x (x− 1) .
5.7. TRAZADO DE CURVAS ALGEBRAICAS 215
32 2xyyx −=−
x
y
x
( ) 12 2 =− yx
y
x
y
( ) ( )11 222 +=− xxy
( )( )412 +−= xxy
y
x
1222 =+− yyx
y
x
424 xyx =
−
y
x
( ) xyyx 8222 =+ ( )233 4−= xyx
xx
yy
( ) ( )19 22 −=− xxyx
x
y
( )9ln 2 −= xy
x
y
( ) ( )45 22 −=− xxyx
x
y
( )223 94 xxy −=
y
x
216 CAPÍTULO 5. APLICACIONES DE LA DERIVADA (EN PRUEBA)
Capítulo 6
Cálculo Integral
6.1 Sumas
En este capítulo se presentan teoremas que muestran la relación entre la diferenciación y laintegración y hasta cierto punto muestran que la operación de integración es la operación”inversa de la derivación”. La conexión entre derivadas e integrales, cuestión no tan obvia,está dado por el Teorema Fundamental del Cálculo que es consecuencia, como veremosluego, de la continuidad y el teorema de valor medio.
Iniciamos esta sección recordando algunos resultados de álgebra.
6.1.1 Sumatorias
Si n es un entero positivo y a1, a2, ......, an son números, entonces la suma de los números akse escribe como:
n∑
k=1
ak = a1 + a2 + ......+ an
el símbolon∑
k=1
ak se lee ”sumatoria de ak, de k = 1 hasta k = n”
Ejemplo 6.1
4∑
k=1
7k2 = 7(12)+ 7(22)+ 7(32)+ 7(42)
3∑
k=1
k + 1
k=1 + 1
1+2 + 1
2+3 + 1
3
5∑
k=1
k2
n=12
n+22
n+32
n+42
n+52
n
Las propiedades más importantes de la sumatoria se muestran en el siguiente teorema.
217
218 CAPÍTULO 6. CÁLCULO INTEGRAL
Teorema 6.1 Para cualquier entero positivo n.
a)n∑
k=1
cak = cn∑
k=1
ak, donde c una constante
b)n∑
k=1
(ak + bk) =n∑
k=1
ak +n∑
k=1
bk
c)n∑
k=1
(ak − ak−1) = an − a0. (Propiedad telescópica)
d)n∑
k=1
c = nc.
Usando las anteriores propiedades e Inducción Matemática es posible demostrar lossiguientes resultados:
Proposición 6.2 1.n∑
k=1
k =1
2n (n+ 1)
2.n∑
k=1
k2 =1
6n (2n+ 1) (n+ 1)
3.n∑
k=1
k3 =1
4n2 (n+ 1)2
4.n∑
k=1
k4 =1
30n (2n+ 1) (n+ 1) (3n2 + 3n− 1)
5.
n∑
k=1
k5 =1
12n2 (2n2 + 2n− 1) (n+ 1)2
6.n∑
k=1
k
2k= 2− n+ 2
2n
7.n∑
k=1
sen (2k − 1) x = 1− cos 2nx2 sen x
.
Ejercicios resueltos
Ejercicio 6.1 Sea f(x) = 3x+ 5, calcular:
n∑
k=1
f(xk) yn∑
k=1
f(xk−1),
donde xk = 2 +2k
n.
6.1. SUMAS 219
Solución.n∑
k=1
f(xk) =n∑
k=1
(3xk + 5)
=n∑
k=1
3xk +n∑
k=1
5
= 3n∑
k=1
(2 +
2k
n
)+ 5n
= 3
(
2n+2
n
n∑
k=1
k
)
+ 5n
= 6n+6
n
(n(n+ 1)
2
)+ 5n
= 11n+ 3 (n+ 1)
= 14n+ 3
Asi mismo se prueba:n∑
k=1
f(xk−1) = 14n− 3.
Ejercicio 6.2 Sea f(x) = x2, xk = 2 +k
n, calcular
n∑
k=1
f(xk)
n
Solución.n∑
k=1
f(xk)
n=
1
n
n∑
k=1
f(xk) =1
n
n∑
k=1
(2 +
k
n
)2
=1
n
n∑
k=1
(4 +
4k
n+k2
n2
)
=1
n
(
4n+4
n
n∑
k=1
k +1
n2
n∑
k=1
k2
)
= 4 +4
n2
n∑
k=1
k +1
n3
n∑
k=1
k2
= 4 +4
n2n (n+ 1)
2+1
n3n (n+ 1) (2n+ 1)
6
= 4 + 2 +2
n+1
3+1
2n+1
6n2
=19
3+5
2n+1
6n2
220 CAPÍTULO 6. CÁLCULO INTEGRAL
Ejercicios propuestos
Ejercicio 6.3 Sea f(x) = x, xk =5
n, calcular
n∑
k=1
5f(xk)
n
Ejercicio 6.4 Sea f(x) = 2x2 + 5x+ 1, xk = 1 +1
n, calcular
n∑
k=1
f(xk)
n,
n∑
k=1
f(xk−1)
n.
Ejercicio 6.5 Sea f (x) = x3, sea xk = 1 +2k
n, calcular
limn→∞
n∑
k=1
f (xk)2
n
6.1.2 El área como el límite de una suma
En esta sección discutiremos una manera de calcular el área bajo la gráfica de una función.Previamente son necesarias las siguientes definiciones.
Partición de un intervalo
Definición 6.3 (Longitud de un intervalo finito). La longitud de cualquiera de losintervalos (a, b), (a, b], [a, b) y [a, b] es b− a.
Definición 6.4 (Partición). Sean a, b ∈ R, tal que a < b. Consideremos el intervalo cerrado[a, b]. Una partición de [a, b] es un conjunto de puntos
P = {x0, x1, . . . , xn}
tales que a = x0 < x1 < · · · < xn = b.
Ejemplo 6.2 1. (i) P1 ={1, 3
2, 74, 2}es una partición del intervalo [1, 2].
(ii) P2 ={1, 5
4, 64, 74, 2}es otra partición del intervalo [1, 2].
Observemos que las longitudes de los intervalor [xk−1, xk] no necesariamente son iguales.Definimos a continuación la mediada de una partición.
Definición 6.5 (Norma de una partición). Sea P una partición del intervalo cerrado[a, b]. La norma de P , escrito ‖P‖, se define por:
‖P‖ = max {xk − xk−1 : k = 1, 2, . . . , n} ,
así la norma ‖P‖ es la longitud del subintervalo más grande de entre los [xk−1, xk] .
6.1. SUMAS 221
Ejemplo 6.3 Considérese las particiones del intervalo [1, 2]
(i) Si P1 ={1, 3
2, 74, 2}, entonces:
‖P‖ = max
3
2− 1
,7
4− 32, 2− 7
4
=1
2.
(ii) Si P2 ={1, 5
4, 64, 74, 2}, entonces:
‖P‖ = max{5
4− 1, 6
4− 54,7
4− 64, 2− 7
4
}=1
4
Particiones igualmente espaciadas
Considérese el intervalo [a, b] , sea h =b− an
, definimos una partición P por:
xk = a+ kh, k = 0, 1, . . . , n
nótese que para cada k se tiene xk − xk−1 = h, k = 1, 2, . . . , n, por tanto
‖P‖ = h.Finalmente, nótese que para particiones igualmente espaciadas se debe tener ‖P‖ → 0 es
lo mismo que n→∞.
Cálculo de áreas
Planteamos el siguiente problema: Sea f : [a, b]→ R, continua en [a, b] y f (x) ≥ 0 para todox ∈ [a, b]. Se plantea el problema de calcular el área de la región del plano limitada por lasgráficas de:
y = f (x)
y = 0
x = a
x = b,
tal como se muestra en la siguiente gráfica.
a bx
y
( )xfy =ax =
bx =
0=y
222 CAPÍTULO 6. CÁLCULO INTEGRAL
Para resolver el problema se considera la parttición P = {a = x0, x1, ......, xn = b} de [a, b] .En cada intervalo [xk−1, xk] , k = 1, 2, . . . , n se toma el número tk y se construye el rectángulode base xk − xk−1 y altura f (tk) , este rectángulo tiene área igual a f (tk) (xk − xk−1) , portanto, si A es el área buscada, se debe tener:
A �n∑
k=1
f (tk) (xk − xk−1) ,
esto se ilustra en el siguiente gráfico con n = 4
0xa= 4xb=x
y
1x 2x 3x1t 2t 3t 4t
( )1tf
( )2tf
( )3tf( )4tf
Si ‖P‖ → 0, tendremos el área exacta, es decir:
A = lim‖P‖→0
n∑
k=1
f (tk) (xk − xk−1) ,
finalmente definiendo ∆kx = xk − xk−1, una fórmula para el cálculo del área es:
A = lim‖P‖→0
n∑
k=1
f (tk)∆kx .
Con una partición igualmente espaciada:
xk = a+ kh, k = 0, 1, . . . , n
donde h =b− an
, cada intervalo [xk−1, xk] tiene longitud ∆kx = xk − xk−1 = h, tomando
tk = xk, otra fórmula para el cálculo del área es:
A = lim‖P‖→0
n∑
k=1
f (xk)∆kx
= limn→∞
h
n∑
k=1
f (xk) .
6.1. SUMAS 223
Ejercicios resueltos
Ejercicio 6.6 Demostrar que el área de un triángulo de altura p y base q es A = 12pq.
Solución La función que nos servirá para nuestro propósito es f(x) =p
qx definida en el
intervalo [0, q] . El área que nos interesa está bajo la gráfica de f desde 0 hasta q como seobserva en el gráfico.
�
�����
����
����
q
p �
�����
����
����
q
p
x0x1x2 xn−2
xn−1xn
Para este caso:h =
q
nxk = kh
Area ≈ hn∑
k=1
f (xk) = hn∑
k=1
pqxk =
pqh2
n∑
k=1
k
=p
qh2n (n+ 1)
2
=p
2q
( qn
)2(n2 + n)
=pq
2
(1 +
1
n
)
Tomando el límite n→∞ habremos encontrado el área exacta.
Area = limn→∞
pq
2
(1 +
1
n
)
=pq
2
Si p = 7 y q = 4 el área verdadera es Area = 14. La siguiente tabla muestra algunasaproximaciones.
n Area� 14(1 +
1
n
)
1 2810 15.4100 14.141000 14.014100000 14.00014
224 CAPÍTULO 6. CÁLCULO INTEGRAL
Ejercicio 6.7 Sea f(x) = x2, encontrar el área bajo la gráfica de f desde 2 hasta 7.
Solución: f es continua en [2, 7], por tanto podemos aplicar nuestro método de cálculodel área. Para este caso
h =7− 2n
=5
nxk = 2 + kh
luego
Area ≈ hn∑
k=1
f(xk)
= hn∑
k=1
f (2 + kh)
= hn∑
k=1
(4 + 4kh+ k2h2)
= h
(n∑
k=1
4 + 4hn∑
k=1
k + h2n∑
k=1
k2
)
= h
(4n+ 4h
n (n+ 1)
2+ h2
n (n+ 1) (2n+ 1)
6
)
5
n
(4n+ 4
5
n
n (n+ 1)
2+25
n2n (n+ 1) (2n+ 1)
6
)
= 20 +50 (n+ 1)
n+125 (n+ 1) (2n+ 1)
6n2
Tomando el límite n→∞, encontramos:
Area = limn→∞
(20 +
50 (n+ 1)
n+125 (n+ 1) (2n+ 1)
6n2
)
= 20 + 50 +(125) (2)
6
=335
3
Ejercicios propuestos
Calcular el área encerrada por la gráfica de f y el eje X en el intervalo indicado.
1. f(x) = 2x2 + x, [1, 5] Sol.: 2843.
6.1. SUMAS 225
2. f(x) = 12x3, [0, 2] Sol.: 2.
3. f(x) = 1− x2, [−1, 1] Sol.: 43.
4. f (x) = x− x3, [−1, 1] Sol.: 12
5. f (x) = x2 + 2x− 15 y g (x) = 2x+ 1, [0, 2] Sol.: 32− 8/3.
6.1.3 Funciones Integrables y la Integral Definida
En la sección anterior vimos algunos ejemplos en donde fácilmente se calculan áreas bajo lasgráficas de ciertas funciones (polinomios). No es difícil darse cuenta que tal proceso no puedegeneralizarse a cualquier función, entonces, se hace necesario encontrar nuevas técnicas; coneste propósito definimos:
Definición 6.6 (Función integrable). Una función f : [a, b]→ R es integrable sobre [a, b]si existe un número A con la siguiente propiedad:Para todo ε > 0, existe δ > 0 tal que
∣∣∣∣∣
n∑
k=1
f(ξk)∆xk − A∣∣∣∣∣< ε
para toda partición P de [a, b] con ‖P‖ < δ y para cualquier elección ξk ∈ [xk−1, xk].
El número A de la anterior definición, si existe, se llama integral definida de f desdea hasta b, se denota por:
A =
∫ b
a
f(x)dx
Nótese queb∫
a
f(x)dx = lim‖P‖→0
n∑
k=1
f(ξk)∆xk.
La función f se llama integrando, x se llama variable muda o variable de integra-ción, a es el límite inferior y b límite superior.
En la anterior sección vimos que en [2, 7], f(x) = x2, satisface la anterior definición de fun-ción integrable para una partición bien especial y ξk el extremo superior de cada subintervalo,concretamente encontramos:
n∑
k=1
f(ξk)∆xk =335
3+4
n+1
n2→ 335
3,
así: ∣∣∣∣∣
n∑
k=1
f(ξk)∆xk −335
3
∣∣∣∣∣→ 0,
226 CAPÍTULO 6. CÁLCULO INTEGRAL
y entoncesr: ∫ 7
2
x2 dx =335
3
No es intención de este texto la discusión rigurosa de las funciones integrables. no limita-mos a enunciar algunos resultados.
Teorema 6.7 Sea f : [a, b]→ R. Si f es creciente, entonces f es integrable en [a, b].
Teorema 6.8 Sea f : [a, b]→ R. Si f es decreciente, entonces f es integrable en [a, b].
Teorema 6.9 Si f es continua en [a, b], entonces f es integrable en [a, b].
Teorema 6.10 Sea f continua en [a, b] excepto en un número finito de puntos. Si f esacotada entonces f es integrable sobre [a, b].
6.1.4 Propiedades de la Integral Definida
En los siguientes teoremas se enuncian algunas propiedades de la integral definida.
Teorema 6.11 Sean f, g : [a, b]→ R integrables en [a, b] entonces:
1. cf es integrable y ∫ b
a
cf(x)dx = c
∫ b
a
f(x)dx, c ∈ R
2. f + g es integrable y
∫ b
a
(f(x) + g(x)) dx =
∫ b
a
f(x)dx+
∫ b
a
g(x)dx
Teorema 6.12 Si f es integrable en [a, b] , entonces
∫ b
a
f(x)dx = −∫ a
b
f(x)dx
Teorema 6.13 Si f es integrable en [a, b] y m y M son números tales que m ≤ f(x) ≤ Mpara todo x ∈ [a, b], entonces:
m (b− a) ≤∫ b
a
f (x) dx ≤M (b− a)
Teorema 6.14 Si f, g : [a, b] → R son integrables en [a, b] y si f (x) ≤ g (x) para todox ∈ [a, b], entonces: ∫ b
a
f (x) dx ≤∫ b
a
g (x) dx
6.1. SUMAS 227
Teorema 6.15 Si f es integrable en [a, b] y c ∈ [a, b], entonces:∫ b
a
f (x) dx =
∫ c
a
f (x) dx+
∫ b
c
f (x) dx.
Teorema 6.16 Si f es integrable en [a, b], entonces f es acotada en dicho intervalo.
Teorema 6.17 (Teorema de Bliss) Sean f, g : [a, b] → R funciones continuas en [a, b] .Sea
P = {a = x0, x1, . . . , xn = b}una partición de [a, b]. En cada intervalo [xk−1, xk] elijamos puntos ck y c′k. Entonces si‖P‖ → 0
n∑
k=1
f (ck) g (c′k)∆kx =
∫ b
a
f (x) g (x) dx
Demostración. Escribimosn∑
k=1
f (ck) g (c′k)∆kx =
n∑
k=1
f (ck) g (ck)∆kx−n∑
k=1
f (ck) {g (ck)− g (c′k)}∆kx.
• Puesto que ‖P‖ → 0 concluimos que ck → c′k. Por la continuidad de g tenemos g (ck)→g (c′k) , es decir, g (ck)− g (c′k)→ 0.
• Por otra parte es claro, por definición de integral, que si ‖P‖ → 0 se tienen∑
k=1
f (ck) g (ck)∆kx =
∫ b
a
f (x) g (x) dx.
De lo anterior concluimos que si ‖P‖ → 0 se verifican∑
k=1
f (ck) g (c′k)∆kx =
n∑
k=1
f (ck) g (ck)∆kx =
∫ b
a
f (x) g (x) dx.
�
Notas.
1. Observemos que el teorema es cierto si ck = c′k. El valor del teorema reside en el hechode que no importa que valor se tome en cada subintervalo [xk−1, xk] , el resultado es elmismo que cuando coinciden.
2. Obsérvese también que ‖P‖ → 0 significa que el número de elementos en la particióncrece indefinidamente, es decir, n → ∞, por tanto la conclusión del teorema puedeexpresarse también de la siguiente manera:
limn→∞
n∑
k=1
f (ck) g (c′k)∆kx =
∫ b
a
f (x) g (x) dx.
228 CAPÍTULO 6. CÁLCULO INTEGRAL
6.1.5 La primitiva de una función
En esta sección respondemos a la siguiente cuestión: Dada una función f (x) ¿que funciónF (x) habría que derivar para encontrar f (x) ?
Definición 6.18 (Primitiva de una función) Una función F tal que F ′ = f se llamaprimitiva de f . F es llamada también la antiderivada de f.
Ejemplo 6.4 Sea f (x) = x2. Una primitiva es F (x) = 13x3 pues:
F ′ (x) = x2 = f (x) .
(Obsérvese que otra primitiva es F (x) = 13x3 + C, donde C es cualquier constante)
Ejemplo 6.5 Sea f (x) = cosx+ sen x. Una primitiva es F (x) = senx− cosx.
Proposición 6.19 Sean F1 (x), F2 (x) primitivas de f (x), entonces estas difieren solo enuna constante, esto es,
F1 (x) = F2 (x) + C, C ∈ R
Demostración: Sea F (x) = F1 (x)− F2 (x), derivando:
F ′ (x) = F ′1 (x)− F ′2 (x) = f (x)− f (x) = 0,
luego F (x) debe ser una constante. Esto muestra la proposición.También muestra que si F (x) es la primitiva de f (x), entonces todas las primitivasde f son de la forma F (x) + C, C una constante.
A continuación se muestra una tabla con las primitivas más empleadas:
f (x) F (x)xa 1
axa+1 + C, a �= −1
x−1 ln|x|+ Ccos (ax) 1
asin (ax) + C
sin (ax) −1acos (ax) + C
eax 1aeax + C
6.1.6 El Teorema Fundamental del Cálculo
Hasta ahora no tenemos ningún instrumento para calcular una integral salvo la discusión quese hizo en la sección anterior con referencia al cálculo de áreas, que naturalmente no es nadapráctico cuando la función f(x) es mas o menos complicada. En esta sección se presenta elteorema fundamental del cálculo que liga el Cálculo diferencial con el Cálculo integral.
Teorema 6.20 (Teorema Fundamental del Cálculo, Primera Forma). Sea F (x) unafunción continua, tal que F ′ (x) = f (x). Si f es integrable en [a, b], entonces:
∫ b
a
f (x) dx = F (b)− F (a) .
6.1. SUMAS 229
Demostración: Sea P = {a = x0, x1, · · · , xn = b} una partición de [a, b]. Puestoque f es integrable, para todo ε > 0, existe un número δ > 0 tal que si ‖P‖ < δse tiene: ∣∣∣∣∣
n∑
i=1
f(ξi)∆ix−∫ b
a
f(x)dx
∣∣∣∣∣< ε (1)
para cualquier elección ξi ∈ [xi−1, xi].Puesto que F es una función continua en [a, b] es también continua en cada inter-valo [xi−1, xi]. Aplicando el teorema de valor medio en cada [xi−1, xi] encontramosξi ∈ [xi−1, xi] tal que:
F ′(ξi) =F (xi)− F (xi−1)
xi − xi−1Puesto que F ′ = f y ∆ix = xi − xi−1 se tiene:
F (xi)− F (xi−1) = f(ξi)∆ix
Sumando desde i = 1 hasta i = n se obtiene :n∑
i=1
(F (xi)− F (xi−1)) =n∑
i=1
f(ξi)∆ix.
peron∑
i=1
(F (xi)− F (xi−1)) = (F (x1)− F (x0)) + (F (x2)− F (x1)) + · · ·+ (F (xn)− F (xn−1))
= F (xn)− F (x0)= F (b)− F (a)
de donde deducimos:n∑
i=1
f(ξi)∆ix = F (b)− F (a)
Como lo anterior es cierto para todas las particiones P , a partir de (1), concluimos:∫ b
a
f(x)dx = F (b)− F (a) .
�
Con el objeto de facilitar la notación definimos:
Definición 6.21 Para cualquier función F :
F (x)|ba = F (b)− F (a) ,
por tanto si F es una primitiva de f :∫ b
a
f (x) dx = F (x)|ba .
230 CAPÍTULO 6. CÁLCULO INTEGRAL
Ejemplo 6.6(i) x3 |85 = 83 − 53
(ii) tan x |3ππ = tan(3π)− tan π.
Ejemplo 6.7 Calcular∫ 1
0
x5 dx.
Solución: Con f(x) = x5, una primitiva es:x6
6+ k, luego:
∫ 1
0
x5dx =x6
6+ k
∣∣∣∣1
0
=
(16
6+ k
)−(06
6+ k
)
=1
6
Nótese que el valor de k es irrelevante.
Ejemplo 6.8 Calcular∫ 5
2
(x2 + 2x+ 5) dx.
Solución: Una antiderivada (primitiva) es: F (x) =x3
3+ x2 + 5x, Luego:
∫ 52(x2 + 2x+ 5) dx = x3
3+ x2 + 5x
∣∣∣5
2
=(1253+ 25 + 25
)−(83+ 4 + 10
)
= 2253.
6.1.7 Teorema del Valor Medio para integrales
Usando el Teorema del Valor intermedio se prueba el siguiente teorema.
Teorema 6.22 Sea f una función continua en un intervalo cerrado [a, b], entonces existe unnúmero c ∈ [a, b] tal que: ∫ b
a
f (x) dx = f (c) (b− a) .
Demostración. Puesto que f es continua en [a, b] (un dominio cerrado) la funciónf tiene un máximo y un mínimo en [a, b], esto es, existen números m y M talesque para todo x ∈ [a, b] se verifica:
m ≤ f (x) ≤M.
6.1. SUMAS 231
Aplicando propiedades de integral encontramos:
m ≤ 1
(b− a)
∫ b
a
f (x) dx ≤M,
por tanto el número1
(b− a)
∫ b
a
f (x) dx se encuentra entre los números m y M.
Por el Teorema del valor intermedio, existe un número c ∈ [a, b] tal que:
f (c) =1
(b− a)
∫ b
a
f (x) dx,
es decir: ∫ b
a
f (x) dx = f (c) (b− a)
�
Ejemplo 6.9 Sea f : [1, 2] → R definida por f (x) = 3x2 − 3, encontrar el número c quesatisface el teorema del valor medio para integrales.
Solución. Una antiderivada es F (x) = x3 − 3x, por tanto∫ 2
1
(3x2 − 3
)dx = x3 − 3x
∣∣21= 4,
por tanto usando el Teorema del Valor Medio para integrales tenemos∫ 2
1
f (x) dx = f (c) (b− a) ,
esto es,4 =
(3c2 − 3
)(2− 1) ,
resolviendo encontramos c =√
73� 1.5275. (Se nota que −
√73no puede ser solución pues
−√
73/∈ [1, 2]).
6.1.8 Segunda forma del Teorema Fundamental del Cálculo
Teorema 6.23 Sea f una función continua en el intervalo [a, b] y x ∈ [a, b]. Definimos lafunción F por
F (x) =
∫ x
a
f (t) dt
para todo x ∈ (a, b). Entonces:
F ′ (x) = f (x) .
232 CAPÍTULO 6. CÁLCULO INTEGRAL
Demostración. El cociente de Newton de F en un punto x ∈ [a, b] es
F (x+ h)− F (x)h
=1
h
{∫ x+h
a
f (t) dt−∫ x
a
f (t) dt
}. (i)
Aplicando propiedades de la integral:∫ x+h
a
f (t) dt−∫ x
a
f (t) dt =
∫ x+h
x
f (t) dt,
luego la igualdad (i) queda como:
F (x+ h)− F (x)h
=1
h
{∫ x+h
x
f (t) dt.
}(ii)
Aplicando el teorema del valor medio para integrales a la integral∫ x+hx
f (t) dtexiste c ∈ [x, x+ h] tal que
∫ x+h
x
f (t) dt = f (c)h. (iii)
Sustituyendo el resultado (iii) en (ii):
F (x+ h)− F (x)h
=1
hf (c)h,
es decir,F (x+ h)− F (x)
h= f (c) . (iv)
Notamos ahora que si h→ 0 se tiene c→ x, por tanto:
F ′ (x) = limh→0
F (x+ h)− F (x)h
= limh→0
f (c) = f (x) .
�
Del teorema fundamental del cálculo (primera y segunda forma) concluimos que efectiva-mente que la operación integración es la operación inversa de la diferenciación.
Ejercicios propuestos
1. Demostrar que f definida por f (x) = x2 es integrable en [−1, 1] .
2. Seaf la función máximo entero, es decir, f (x) = [x] . ¿es integrable ésta función en[0, 2]?.
3. Sea f la función definida por f (x) = 1x2, ¿Es f integrable en [−1, 1]?. Si su respuesta
en negativa, ¿en que intervalos f es integrable?
Probar:
6.2. METODOS DE INTEGRACIÓN 233
4.∫ 5
0
(x2 + 1) dx = 1403.
5.∫ π
0
cos x dx = 0.
6.∫ 5
1
xn dx =5n+1 − 1n+ 1
, n un número natural.
7.∫ π
−πsin xdx = 0.
8.∫ π/4
0
(x2 − x+ cosx− sec2 x) dx = 1384
(√2π3 − 6
√2π2 − 192
√2 + 192
)√2
6.2 Metodos de integración
6.2.1 La integral indefinida
Para evaluar una integral, debemos encontrar antes una primitiva y luego sustituir en loslímites apropiados de integración, así si el problema es
∫ 3
1
f (x) dx ,
debemos primero encontrar una función F tal que F ′(x) = f (x) y entonces:∫ 3
1
f (x) dx = F (3)− F (1) .
Toda función integrable tiene infinitas primitivas o antiderivadas ya que a toda antiderivada sepuede añadir una constante y obtener otra antiderivada. La notación usual para representartodas las antiderivadas es:
∫f (x) dx
en la que no hay límites de integración. A esta se llama Integral indefinida de f .
Ejemplo 6.10 Una antiderivada de cosx es sen x, luego todas las antiderivadas de cosx serepresentan por: ∫
cosx dx = sen x+ C
Ejemplo 6.11∫xn dx =
xn+1
n+ 1+ C
234 CAPÍTULO 6. CÁLCULO INTEGRAL
Ejemplo 6.12
∫2x ex
2
dx = ex2
+C
6.2.2 Fórmulas fundamentales de integración
Todas las fórmulas que se dan a continuación se deducen inmediatamente de las fórmulas dederivación.
1.∫un du =
un+1
n+ 1+ C
2.∫1
udu = ln u+ C
3.∫au du =
au
ln a+ C
4.∫eu du = eu+C
5.∫sin u du = − cosu+ C
6.∫cosu du = sen u+ C
7.∫tan u du = − ln |cosu|+ C
8.∫cot u du = ln |sinu|+ C
9.∫secu du = ln |secu+ tan u|+ C
10.∫cscu du = ln |cscu− cot u|+ C
11.∫sec2 du = tan u+ C
12.∫csc2 u du = − cotu+ C
13.∫secu tanu du = secu+ C
14.∫cscu cotu du = − cscu+ C
15.∫
1√a2 − u2
du = arcsinu
a+ C
16.∫
1
a2 + u2du =
1
aarctan
u
a+ C
17.∫
1
u√u2 − a2
du =1
aarcsec
u
a+ C
6.2. METODOS DE INTEGRACIÓN 235
18.∫sinhu du = coshu+ C
19.∫coshu du = sinhu+ C
20.∫sech2 u du = tanh u+ C
21.∫cosh2 u du = coth u+ C
22.∫sech u tanh u du = − sech u+ C
23.∫csch u coth u du = − csch u+ C
24.
∫1√
a2 + u2du = ln
(u+
√a2 + u2
)+ C.
= arcsinh(xa
)+ C.
25.
∫1√
u2 − a2du = ln
(u+
√u2 − a2
)+ C, |u| > a
= arccosh(xa
)+ C.
26.∫
1
a2 − u2 du =
1
2ln
∣∣∣∣a+ u
a− u
∣∣∣∣+ C |u| > a
1
2ln
∣∣∣∣u+ a
u− a
∣∣∣∣+ C |u| < a
27.∫
1
u√a2 − u2
du = −1aln
∣∣∣∣a+
√a2 − u2u
∣∣∣∣+ C, 0 < |u| < a
28.∫
1
u√a2 + u2
du = −1aln
∣∣∣∣∣a+
√a2 + u2
u
∣∣∣∣∣+ C, u �= 0
6.2.3 Integración por sustitución
Considérese la integral:
I =
∫f [g (x)] g′ (x) dx, (1)
haciendo el cambio de variable u = g (x), obtenemos du = g′ (x) dx, con lo que la integral seconvierte en
I =
∫f (u) du.
Esta técnica se llama integración por sustitución. No todas las integrales se encuentran en laforma (1), sin embargo con alguna manipulación algebraica, a veces, es posible llegar a estaforma.
236 CAPÍTULO 6. CÁLCULO INTEGRAL
Ejercicios resueltos
Ejercicio 6.8 Calcular:
I =
∫sin x cosx dx
Solución. Sea u = sin x, entonces du = cosx dx, con esta sustitución la integral se transformaen
I =
∫sin x cosx dx =
∫u du
cuya solución es: I = 12u2+C. La solución se expresa ahora en función de la variable x de la
siguiente forma: ∫sinx cosx dx =
1
2sin2 x+ C
Ejercicio 6.9 Calcular:
I =
∫x2
(x3 + 5)7dx
Solución. Sea u = x3 + 5, entonces du = 3x2 dx, observemos que la expresión 3x2 dx noaparece en la integral dada, sin embargo podemos multiplicar y dividir por 3 obteniendo
I =1
3
∫3x2
(x3 + 5)7dx
sustituyendo u en la última integral:
I =1
3
∫1
u7du,
cuya solución es I = − 118u−6. En función de la variable x queda:
I = − 118
(x3 + 5
)−6.
Ejercicio 6.10 Calcular:
I =
∫1
x ln xdx
Solución. La integral dada se puede escribir como
I =
∫1
lnx
1
xdx.
Sea u = ln x, entonces du =1
xdx, con esta sustitución la integral dada queda:
I =
∫1
udu,
6.2. METODOS DE INTEGRACIÓN 237
cuya solución es:I = ln |u|+ C.
En función de la variable x queda:
I = ln |lnx|+ C.
Ejercicio 6.11 Calcular:
I =
∫e2x
1 + e4xdx
Solución. Sea u = e2x, entonces du = 2 e2x dx. Con este cambio la integral dada queda:
I =1
2
∫1
1 + u2du
cuya solución es:
I =1
2arctanu+ C,
que en función de x es:
I =1
2arctan e2x+C.
Ejercicio 6.12 Calcular:
I =
∫x
√
1 + x2 +√(1 + x2)3
dx
Solución. Sea u = 1 + x2, entonces du = 2x dx. Con este cambio:
I =1
2
∫1
√u+
√u3du =
1
2
∫1
√1 +
√u
1√udu,
hagamos ahora el cambio z =√u, entonces dz =
1
2√udu, por tanto,
I =
∫1√1 + z
dz
esta integral tampoco es directa, hagamos nuevamente otro cambio de variable, sea w = 1+z,entonces dw = dz, luego:
I =
∫1√wdw
la solución es:I = 2
√w + C,
en función de x es:
I = 2
√1 +
√1 + x2 + C
238 CAPÍTULO 6. CÁLCULO INTEGRAL
Ejercicio 6.13 Calcular: ∫1
√(x− a)2 + b2
dx
Solución. Sea u = x− a, entonces du = dx, por tanto:∫
1√(x− a)2 + b2
dx =
∫1√
u2 + b2du
= ln
(x− a+
√(x− a)2 + b2
)+ C.
Ejercicio 6.14 Calcular: ∫1√
ax2 + bx+ cdx
donde ax2 + bx+ c es irreducible.Solución.
ax2 + bx+ c = a
(x2 +
b
ax+
c
a
)
= a
(x2 +
b
ax+
b2
4a2+c
a− b2
4a2
)
= a
((x+
b
2a
)2+4ac− b24a2
)
= a
(x+
b
2a
)2+
(√4ac− b24a2
)2
Observemos que la irreducibilidad implica4ac− b24a2
> 0. Por tanto, aplicando el anterior
resultado se tiene::∫
1√ax2 + bx+ c
dx =1√a
∫1
√√√√(x+
b
2a
)2+
(√4ac− b24a2
)2
=1√aln
x+
b
2a+
√√√√(x+
b
2a
)2+
(√4ac− b24a2
)2
+ C
= .1√aln
(x+
b
2a+1√a
√x2a+ xb+ c
)+ C
Ejercicio 6.15 Calcular:
I =
∫ 1/2
0
3 arcsin x√1− x2
dx
6.2. METODOS DE INTEGRACIÓN 239
Solución. Inicialmente calculamos la integral indefinida F =
∫3 arcsin x√1− x2
dx. Sea u =
arcsin x, entonces du =1√1− x2
dx. Con este cambio la integral queda:
F =
∫3u du =
3
2u2 + C =
3
2(arcsin x)2 + C
por tanto todas las primitivas de
f (x) =3 arcsin x√1− x2
están dados por
F (x) =3
2(arcsin x)2 + C,
luego:I = F (1/2)− F (0)= 3
2
(arcsin 1
2
)2
Observaciones.
• Observemos que al evaluar la integral definida la constante C se anula.
• Existe otra manera de hacer la evaluación al calcular una integral definida en donde seusa un cambio de variable, esto se muestra el siguiente teorema.
Teorema 6.24 (Teorema de sustitución para integrales). Supongamos que g tienederivada continua g′ en un intervalo abierto A, Sea B = {g(x) : x ∈ A} y supongamos que fes contínua en B. Entonces para cada a, b ∈ A
∫ b
a
f [g (t)] g′ (t) dt =
∫ g(b)
g(a)
f (u) du.
La demostración se deja al lector.
Ejercicio 6.16 Calcular I si
I =
∫ π/3
0
sec2 x (secx tan x) dx
Solución. Sea u = secx, entonces du = secx tan x dx, también
si x = 0, u = sec (0) = 1si x = π/3 u = sec (π/3) = 2
Sean u y v funciones que dependen de la variable x. Se ha probado que
d (uv) = u dv + v du.
Integrando
uv =
∫u dv +
∫v du,
esto es, ∫u dv = uv −
∫v du
esta fórmula se llama fórmula de integración por partes.En el fondo esta fórmula dice que si es posible expresar el integrando como u dv, entonces sepuede tener otra expresión para la integral, la nueva expresión puede ser a veces mucho masdifícil de resolver que el problema original, pero en muchos casos es una buena técnica pararesolver problemas de integración.
Ejercicio 6.17 Calcular I =∫lnx dx.
Solución. Seanu = ln x dv = dx
entoncesdu =
1
xdx v = x
luegoI = (ln x) x−
∫x(1xdx)
= x ln x−∫dx
= x ln x− x+ CObservemos el orden en que se realizan las operaciones:
u = ln x dv = dx↘
du =1
xdx ← v = x
242 CAPÍTULO 6. CÁLCULO INTEGRAL
Ejercicio 6.18 Calcular∫sin2 x dx.
Solución. Seanu = sin x dv = sinx dx
entoncesdu = cosx v = − cosx
aplicando la fórmula de integración por partes:∫sin2 x dx = − sinx cosx+
∫cos2 x dx
= − sinx cosx+∫ (1− sin2
)dx
= − sinx cosx+∫dx−
∫sin2 x dx
= − sinx cosx+ x−∫sin2 x dx
de lo anterior deducimos:∫sin2 x dx =
1
2(x− sin x cosx) + C
Ejercicio 6.19 Calcular∫sin x sin 3x dx.
Solución.u = sinx dv = sin 3x dxdu = cosx dx v = −1
3cos 3x
luego ∫sin x sin 3x dx = −1
3sin x cos 3x+ 1
3
∫cos x cos 3x dx (1)
aplicando nuevamente integración por partes
u = cosx dv = cos 3x dxdu = − sin x dx v = 1
3sin 3x
por tanto ∫cosx cos 3x = 1
3cosx sin 3x+ 1
3
∫sin x sin 3x dx (2)
luego de (1) y (2):∫sin x sin 3x dx = 1
8(−3 sinx cos 3x+ cosx sin 3x) + C.
Ejercicio 6.20 Integrando por partes mostrar que:∫sinn x dx = −sin
n−1 x cosx
n+n− 1n
∫sinn−2 x dx
Solución. Con la decomposición u = sinn−1 x y dv = sin x:
u = sinn−1 x dv = sin x dxdu = (n− 1) sinn−2 x cosxdx v = − cosx
6.2. METODOS DE INTEGRACIÓN 243
luego: ∫sinn x dx = − sinn−1 x cosx+ (n− 1)
∫sinn−2 x cos2 x dx
= − sinn−1 x cosx+ (n− 1)∫sinn−2 x
(1− sin2 x
)dx
= − sinn−1 x cosx+ (n− 1)[∫sinn−2 x dx−
∫sinn x dx
]
de lo anterior se deduce:∫sinn x dx = −sin
n−1 x cosx
n+n− 1n
∫sinn−2 x dx.
Ejercicios propuestos
Resolver:
1.∫x cosx dx Sol.: cosx+ x sin x+ C.
2.∫x3 cosx dx Sol.: x3 sinx+ 3x2 cosx− 6 cosx− 6x sin x+ C.
3.∫arctan x dx Sol.: x arctan x− 1
2ln (x2 + 1) + C.
4.∫eax cos bx dx Sol.:
eax (b sin bx+ a cos bx)
a2 + b2+ C.
5.∫eax sin bx dx Sol.:
eax (a sin bx− b cos bx)a2 + b2
+ C.
6.∫x2 lnx2 dx Sol.: 2
3x3 ln x− 2
9x3.
7.∫x arcsin x2 dx Sol.: 1
2x2 arcsin x2 + 1
2
√1− x4 + C.
8.∫ x ex
(1 + x)2dx Sol.:
ex
1 + x+ C.
9.∫sin√2x dx Sol.: sin
√2x−
√2x cos
√2x+ C.
10.∫ 2x
cos2 2xdx Sol.: x tan 2x+ 1
2ln (cos 2x) + C.
11.∫x5 (lnx)2 dx Sol.: 1
6x6 ln2 x− 1
18x6 ln x+ 1
108x6 + C.
12.∫ arcsinx
x2dx Sol.: −1
xarcsin x+ ln
(√1− x2 − 1
x
). Sug. Hacer z = arcsin x.
244 CAPÍTULO 6. CÁLCULO INTEGRAL
13.∫ sin2 x
exdx Sol.:
e−x
2
(cos 2x− 2 sinx
5− 1)+ C.
(Usar una identidad trigonométrica).
14.∫sin (ln x) dx Sol.:
x
2(sin (ln x)− cos (ln x)) + C.
15.∫ x cosxsin2 x
dx Sol.: − x
sin x+ ln (cscx− cot x) + C.
16.∫5x cos x dx Sol.: (ln 5 cosx+ sin x)
5x
ln2 5 + 1
17.∫5x sin x dx Sol.: (− cosx+ ln 5 sinx) 5x
ln2 5 + 1.
18. En la integral∫ 1xdx hacer u =
1
xy dv = dx, entonces: du = − 1
x2dx y v = x. Aplicando
integración por partes: ∫1
xdx = 1 +
∫1
xdx,
¿Esto es contradictorio?.
(Sug. Recordemos que∫f (x) dx es una primitiva de f)
6.2.5 Integrales trigonométricas
En esta sección son útiles las siguientes identidades trigonométricas1. sin (u+ v) = sin u cos v + cosu sin v
2. cos (u+ v) = cosu cos v − sin u sin v
3. tan (u+ v) =tanu+ tan v
1− tan u tan v4. sin2 u+ cos2 u = 15. tan2 u+ 1 = sec2 u6. 1 + cot2 u = csc2 u
7. sin2 u = 12(1− cos 2u)
8. cos2 u = 12(1 + cos 2u)
9. cos 2u = cos2 u− sin2 u10. sin 2u = 2 sinu cosu11. sin u cos v = 1
2[sin (u− v) + sin (u+ v)]
12. sin u sin v = 12[cos (u− v)− cos (u+ v)]
13. cosu cos v = 12[cos (u− v) + cos (u+ v)]
14. 1± sin u = 1± cos(12π − u
)
6.2. METODOS DE INTEGRACIÓN 245
También son útiles las fórmulas de reducción que se pueden demostrar integrando porpartes.
15.∫sinn u du = −sin
n−1 u cosu
n+n− 1n
∫sinn−2 u du
16.∫cosn u du =
cosn−1 u sinu
n+n− 1n
∫cosn−2 u du
17.∫sinn u cosm u du =
sinn+1 u cosm−1 u
n+m+m− 1n+m
∫sinn u cosm−2 du
18.∫sinn u cosm u du = −sin
n−1 u cosm+1 u
n+m+n− 1n+m
∫sinn−2 u cosm du
En las fórmulas (17) y (18) suponemos que n+m �= 0.19.
∫um sin bu du = −u
m
bcos bu+
m
b
∫um−1 cos bu du b �= 0
20.∫um cos bu du =
um
bsin bu− m
b
∫um−1 sin bu du b �= 0
Potencias impares de senos y cosenos
Si la integral es de la forma ∫sin2n+1 u du,
escribimos la integral en la forma∫sin2n u sinu du =
∫ (sin2 u
)nsin u du,
con sin2 u = 1− cos2 x :∫sin2n+1 u du =
∫(1− cos2 u)n sin u du
=n∑
k=0
(nk
)(−1)k
∫cos2k u sin u du,
aquí,(n
k
)=
n!
k! (n− k)! . Sea w = cosu, entonces dw = − sin u du, luego:
∫sin2n+1 u du =
n∑
k=0
(nk
)(−1)k
∫w2k (−dw)
=n∑
k=0
(nk
)(−1)k+1
∫w2k dw
=
n∑
k=0
(nk
)(−1)k+1 1
2k + 1w2k+1 + C
246 CAPÍTULO 6. CÁLCULO INTEGRAL
que en función de la variable u:∫sin2n+1 u du =
n∑
k=0
(nk
)(−1)k+1 1
2k + 1(cosu)2k+1 + C
Una fórmula similar se tiene para el caso de coseno.
Ejercicio 6.21 Calcular∫sin7 x dx.
Solución. Sea w = cosx, entonces dw = − sinx, por tanto∫sin7 x dx =
∫(1− cos2 x)3 sinx dx
=
∫(1− 3 cos2 x+ 3 cos4 x− cos6 x) sin x dx
= −∫(1− 3w2 + 3w4 − w6) dw
= −(w − w3 + 3
5w5 − 1
7w7)+ C
en función de x :∫sin7 x dx = − cosx+ cos3 x− 3
5cos5 x+
1
7cos7 x+ C
Ejercicios propuestos
Probar:
1.∫sin3 5x dx = −1
5cos 5x+ 1
15cos3 5x+ C
2.∫sin7 3x dx = 1
21cos7 3x− 1
5cos5 3x+ 1
3cos3 3x− 1
3cos 3x+ C
3.∫cos7 xdx =−1
7sin7 x+ 3
5sin5 x− sin3 x+ sin x+ C
4.∫x cos5 x2 dx = 1
2
(sinx2 − 2
3sin3 x2 + 1
5sin5 x2
)+ C
5.∫sin3 x cos2 x dx = −1
3cos3 x+ 1
5cos5 x+ C
6.∫x−1 sin3 (ln x3) dx = −1
3cos (3 ln x) + 1
9cos3 (3 lnx) + C
7.∫(1 + cos 3x)3/2 dx = 4
3
√1− cos 3x− 2
9
(√1− cos 3x
)3+ C
6.2. METODOS DE INTEGRACIÓN 247
Potencias pares de senos y cosenos
En estos casos se puede reducir el tamaño de la potencia usando las fórmulas de reducción ousando las formulas (7) y (8).
Ejercicio 6.22 Calcular∫cos2 7x dx.
Solución. Se tiene cos2 7x = 12(1 + cos 14x), luego:
∫cos2 7x dx = 1
2
∫(1 + cos 14x) dx
= 12
(x+ 1
14sin 14x
)
Ejercicio 6.23 Calcular∫sin4 2x dx.
Solución. ∫sin4 2x dx =
∫ [sin2 2x
]2dx
=
∫ [12(1− cos 4x)
]2dx
= 14
∫[1− 2 cos 4x+ cos2 4x] dx
= 14
∫ [1− 2 cos 4x+ 1
2(1 + cos 8x)
]dx
= 14
[x− 1
2sin 4x+ 1
2x+ 1
16sin 8x
]+ C
= 38x− 1
8sin 4x+ 1
64sin 8x+ C,
esto es, ∫sin4 2x dx =
3
8x− 1
8sin 4x+
1
64sin 8x+ C.
Ejercicios propuestos
Probar:
1.∫cos4 x dx = 3
8x+
1
4sin 2x+
1
32sin 4x+ C
2.∫sin6 x dx =
5
16x− 1
4sin 2x+ 3
64sin 4x+
1
48sin3 2x+ C.
3.∫(1− sin 4x)2 dx = 3
2x+
1
2cos 4x− 1
16sin 8x+ C.
4.∫x−1 cos2 (ln x2) dx =
1
4cos 2 (ln x) sin 2 (ln x) +
1
2ln x+ C.
248 CAPÍTULO 6. CÁLCULO INTEGRAL
5.∫sin8 xdx =
1
16
(35
8x− 4 sin x+ 7
8sin 4x+
1
64sin 8x+
2
3sin3 2x
)+ C
Productos de senos y cosenos
En este caso siempre podemos aplicar las fórmulas de redución dados en las fórmulas 15al 18. Sin embargo existen casos en los que podemos manipular algebraicamente y obtenersimplificaciones. Si el integrando es de la forma
sin2k x cos2n−1 x,
o de la forma
sin2k−1 x cos2n x,
con k, n números naturales, se puede simplificar de manera que la nueva integral es fácilmenteresoluble.
Ejercicio 6.24 Calcular∫sin2 x cos3 x dx.
Solución. ∫sin2 x cos3 x dx =
∫sin2 x cos2 x cosx dx
=
∫sin2 x
(1− sin2 x
)cosx dx
=
∫ (sin2 x− sin4 x
)cosx dx
=
∫sin2 x cosx dx−
∫sin4 x cosx dx
= 13sin3 x− 1
5sin5 x+ C
Ejercicio 6.25 Calcular∫sin2 x cos7 x dx.
Solución.∫sin2 x cos7 x dx =
∫sin2 x cos6 x cosx dx
=
∫sin2 x
(1− sin2 x
)3cosx dx
=
∫sin2 x
(1− 3 sin2 x+ 3 sin4 x− sin6 x
)cosx dx
=
∫ (sin2 x− 3 sin4 x+ 3 sin6 x− sin8 x
)cosx dx
= 13sin3 x− 3
5sin5 x+ 3
7sin7 x− 1
9sin9 x+ C
6.2. METODOS DE INTEGRACIÓN 249
Ejercicio 6.26 Calcular∫
cos3 x
1− sin x dx.Solución. ∫
cos3 x
1− sin x dx =
∫cos3 x (1 + sin x)
(1− sin x) (1 + sinx) dx
=
∫cos3 x+ cos3 x sin x
1− sin2 x dx
=
∫cos3 x+ cos3 x sin x
cos2 xdx
=
∫(cosx+ cosx sin x) dx
= sinx+ 12sin2 x+ C
Ejercicios propuestos
Probar:
1.∫sin x cos2 xdx = −1
3cos3 x+ C
2.∫sin 3x cos 8x dx = − 1
22cos 11x+ 1
10cos 5x+ C
3.∫sin2 4x cos2 4x dx = − 1
128sin 16x+ 1
8x+ C
4.∫sin3 x cos3 x dx = 1
4sin4 x− 1
6sin6 x+ C
5.∫sin2 x sin 2x dx = −1
4cos 2x+ 1
16cos 4x+ C
6.∫sin 2x cos2 4x dx = −2
5cos5 2x+ 2
3cos3 2x− 1
2cos 2x+ C
7.∫cos 10x cos 5x dx = 1
10sin 5x+ 1
30sin 15x+ C
8. Calcular:∫sin2n+1 x cosm x dx, m, n ∈ N.
250 CAPÍTULO 6. CÁLCULO INTEGRAL
Producto de seno y coseno con argumentos distintos
Si la integral tiene una de las siguientes formas:∫cosαx sin βx dx
∫cosαx cosβx dx
∫sinαx sin βx dx
puede usarse las siguientes identidades:
sin u cos v = 12[sin (u+ v) + sin (u− v)]
cosu sin v = 12[sin (u+ v)− sin (u− v)]
cosu cos v = 12[cos (u+ v) + cos (u− v)]
sinu sin v = 12[cos (u− v)− cos (u+ v)]
para transformar la integral en una más simple.
Ejercicio 6.27 Calcular∫cos 2x sin 7x dx
Solución.∫cos 2x sin 7x dx =
1
2
∫(sin (9x)− sin (−5x)) dx
=1
2
∫(sin 9x+ sin 5x) dx
=1
2
(−19cos 9x− 1
5cos 5x
)
= − 118cos 9x− 1
10cos 5x+ C
Ejercicio 6.28 Calcular∫sin 5x sin 3x dx
Solución. ∫sin 5x sin 3x dx =
1
2
∫(cos 2x− cos 8x) dx
=1
2
∫cos 2x dx− 1
2
∫cos 8x dx
=1
4sin 2x− 1
16sin 8x+ C
6.2. METODOS DE INTEGRACIÓN 251
Potencias de tangentes
Si la integral es∫tann x dx, escribimos
∫tann x dx =
∫tann−2 x tan2 x dx
=
∫tann−2 x (sec2 x− 1) dx
=
∫tann−2 x sec2 x dx−
∫tann−2 x dx
=1
n− 1 tann−1 x−
∫tann−2 x dx
obteniéndose una reducción. En lo anterior se han empleado los siguientes resultados: Laderivada de tan x es sec2 x y tan2 x = sec2 x− 1.
Ejercicio 6.29 Calcular∫tan3 x dx.
Solución. ∫tan3 x dx =
∫tan x (sec2−1) dx
=
∫(tan x sec2 x− tan x) dx
= 12tan2 x− ln |cosx|+ C
Ejercicio 6.30 Calcular∫tan4 x dx.
Solución. ∫tan4 x dx =
∫tan2 x (sec2−1) dx
=
∫tan2 x sec2 x dx−
∫tan2 x dx
= 13tan3 x−
∫(sec2 x− 1) dx
= 13tan3 x− tan x+ x+ C
Potencias de secantes, cotangentes y cosecantes
Se procede con simplificaciones como en el caso de las tangentes.
252 CAPÍTULO 6. CÁLCULO INTEGRAL
Ejercicio 6.31 Calcular∫sec4 t dt.
Solución. ∫sec4 t dt =
∫sec2 t sec2 t dt
=
∫sec2 t (1 + tan2 t) dt
=
∫sec2 t dt+
∫tan2 t sec2 t dt
= tan t+ 13tan3 t+ C
observemos que sec2 t = 1 + tan2 t.
Ejercicio 6.32 Calcular∫sec3 x dx
Solución. ∫sec3 x dx =
∫secx (1 + tan2 x) dx
=
∫secx dx+
∫secx tan2 x dx
(1)
resolvemos estas integrales por separado.∫secx dx =
∫secx (secx+ tan x)
secx+ tan xdx
=
∫sec2 x+ secx tan x
secx+ tan xdx
= ln |secx+ tan x|
(2)
la otra integral se resuelve por partes
u = tan x dv = secx tan xdv = sec2 x dx v = secx
luego ∫secx tan2 x dx = tan x secx−
∫sec3 x dx (3)
reemplazando los resultados obtenidos (2) y (3) en (1) se tiene:∫sec3 x dx = ln |secx+ tan x|+ tan x secx−
Productos de tangentes, secantes, cotangentes y cosecantes
Ejercicio 6.34 Calcular∫tan4 x sec4 x dx.
Solución. ∫tan4 x sec4 x dx =
∫tan4 x sec2 x sec2 x dx
=
∫tan4 x sec2 x (1 + tan2 x) dx
=
∫tan4 x sec2 x dx+
∫tan6 x sec2 xdx
= 15tan5 x+ 1
7tan7 x+ C
Ejercicios propuestos
Probar:
1.∫cot3 x dx = −1
2cot2 x+ 1
2ln (csc2 x)
2.∫tan5 xdx = 1
4tan4 x− 1
2tan2 x+ 1
2ln (sec2 x) + C.
3.∫tan3 x sec3 x dx = −1
3sec3 x+ 1
5sec5 x+ C.
4.∫cot x csc3 x dx = −1
3csc3 x+ C.
254 CAPÍTULO 6. CÁLCULO INTEGRAL
5.∫tan4 x sec3 xdx =
− 116tan x secx+ 1
24tan3 x secx+ 1
6tan5 x secx+ 1
16ln (secx+ tan x) + C.
Sol. Equiv.116secx tan x− 7
24sec3 x tan x+ 1
6sec5 x tan x+ 1
16ln |secx+ tan x|+ C
6.∫cot3 x csc4 x dx = −1
6cot4 x csc2 x− 1
12cot4 x+ C.
Sol. Equiv. −16csc6 x+
1
4csc4 x+ C.
Aplicando integración por partes deducir las siguientes fórmulas de reducción
7.∫secm u du =
1
m− 1 secm−2 u tanu+
m− 2m− 1
∫secm−2 u du.
8.∫cscm u du = − 1
m− 1 cscm−2 u cot u+
m− 2m− 1
∫cscm−2 u du.
6.2.6 Resumen de las fórmulas de reducción
En lo que sigue m y n son números naturales.
1.∫sinn u du = −sin
n−1 u cosu
n+n− 1n
∫sinn−2 u du
2.∫cosn u du =
cosn−1 u sin u
n+n− 1n
∫cosn−2 u du
3.∫tann x dx =
1
n− 1 tann−1 x−
∫tann−2 x dx
4.∫cotn x dx = − 1
n− 1 cotn−1 x−
∫cotn−2 x dx
5.∫secm u du =
1
m− 1 secm−2 u tan u+
m− 2m− 1
∫secm−2 u du.
6.∫cscm u du = − 1
m− 1 cscm−2 u cot u+
m− 2m− 1
∫cscm−2 u du.
En (7) y (8) m �= −n7.∫sinn u cosm u du =
sinn+1 u cosm−1 u
n+m+m− 1n+m
∫sinn u cosm−2 du
8.∫sinn u cosm u du = −sin
n−1 u cosm+1 u
n+m+n− 1n+m
∫sinn−2 u cosm du
9.∫um sin bu du = −u
m
bcos bu+
m
b
∫um−1 cos bu du b �= 0
10.∫um cos bu du =
um
bsin bu− m
b
∫um−1 sin bu du b �= 0
En (11), (13) m �= 1 y en (12), (14) m �= −1/2
6.2. METODOS DE INTEGRACIÓN 255
11.∫
1
(a2 ± u2)mdu =1
a2
(u
(2m− 2) (a2 ± u2)m−1)+2m− 32m− 2
∫1
(a2 ± u2)m−1du
12.∫(a2 ± u2)m du =
u (a2 ± u2)m2m+ 1
+2ma2
2m+ 1
∫(a2 ± u2) m−1 du
13.∫
1
(u2 − a2)mdu = −1
a2
(u
(2m− 2) (u2 − a2)m−1)+2m− 32m− 2
∫1
(u2 − a2)m−1du
14.∫(u2 − a2)m du = u (u2 − a2)m
2m+ 1− 2ma2
2m+ 1
∫(u2 − a2)m−1 du
15.∫umeaudu =
1
aumeau − m
a
∫um−1eau du
6.2.7 Funciones racionales a dos variables
Una función racional a dos variables F (u, v), es el cociente de dos polinomios en u y en v.
Ejemplo 6.13 F (x, y) =2x2 − xy2 + y3 + 4
x5 + 2xyes una función racional en las variables x, y.
Ejemplo 6.14 F(x,√2x+ 1
)=x3√2x+ 1 +
(√2x+ 1 + 3
)2√2x+ 1− x4 + 10 es una función racional en x
y√2x+ 1.
Ejemplo 6.15 F(x,√x+ 5
)=
√x+
√x+ 5
x2 + 5no es una función racional en x y
√x+ 5,
(¿porque?)
6.2.8 Cambios de variable trigonométricos
Si el integrando es una función racional a dos variables de una de las siguientes formas:
F(u,√a2 − b2u2
)
F(u,√a2 + b2u2
)
F(u,√b2u2 − a2
)
es posible hacer cambios de variable trigonométricos construyendo un triángulo rectángulo.
256 CAPÍTULO 6. CÁLCULO INTEGRAL
Forma F(u,√a2 − b2u2
).
En este caso consideramos el siguiente triángulo:
��������
z
a bu
√a2 − b2u2
Se hace el cambio sin z =bu
a, de donde:
u =a
bsin z
du =a
bcos z dz
√a2 − b2u2 = a cos z
luego:∫F(u,√a2 − b2u2
)du =
∫F(absin z, a cos z
)abcos z dz
donde la integral de la derecha es una integral en términos de cosenos y senos.
Ejercicio 6.35 Calcular∫
x2√9− x2
dx.
Solución.Consideremos el siguiente triángulo
��������
z
3 x
√9− x2 ,
hacemos el cambio sin z = 13x, luego
x = 3 sin zdx = 3 cos z dz√
9− x2 = 3 cos z
6.2. METODOS DE INTEGRACIÓN 257
con este cambio la integral queda:
∫x2√9− x2
dx =
∫(3 sin z)2
3 cos z(3 cos z dz)
= 9
∫sin2 z dz
= 92
∫(1− cos 2z) dz
= 92z − 9
4sin 2z + C
= 92z − 9
2sin z cos z + C
para terminar tomemos en cuenta que z = arcsin(13x)y entonces
∫x2√9− x2
dx = 92arcsin
(13x)− 9
2
x
3
√9− x23
+ C
= 92arcsin
(13x)− 1
2x√9− x2 + C
Forma F(u,√a2 + b2u2
).
En este caso consideramos el siguiente triángulo
��������
z
√a2 + b2u2 bu
a .
el cambio de variable que sugiere el gráfico es: tan z = bua, luego:
u =a
btan z
du =a
bsec2 z dz
√a2 + b2u2 = a sec z
con este cambio de variable tenemos:∫F(u,√a2 + b2u2
)du =
∫F(abtan z, a sec z
)absec2 z dz
donde la integral de la derecha es una integral en términos de tangentes y secantes.
Ejercicio 6.36 Calcular∫ √
4 + x2 dx.
258 CAPÍTULO 6. CÁLCULO INTEGRAL
Solución. Consideramos el siguiente triángulo
��������
z
√4 + x2 x
2
hacemos el cambio tan z =x
2, luego
x = 2 tan zdx = 2 sec2 z dz√
4 + x2 = 2 sec z
con este cambio se tiene∫ √
4 + x2 dx =
∫4 sec3 z dz
= 2 ln |sec z + tan z|+ 2 tan z sec z + C= 2 ln
∣∣∣∣1
2
√4 + x2 +
1
2x
∣∣∣∣+ 2(1
2x
)(1
2
√4 + x2
)
= 2 ln
∣∣∣∣1
2
√4 + x2 +
1
2x
∣∣∣∣+1
2x√4 + x2 + C
Forma F(u,√b2u2 − a2
).
En este caso consideramos el siguiente triángulo
��������
z
bu√b2u2 − a2
a
el cambio de variable que sugiere el gráfico es sec z = bua, luego
u =a
bsec z
du =a
bsec z tan z dz
√b2u2 − a2 = a tan z
con este cambio de variable tenemos:∫F(u,√b2u2 − a2
)du =
∫F(absec z, a tan z
)absec z tan z dz
donde la integral de la derecha es una integral en términos de tangentes y secantes.
6.2. METODOS DE INTEGRACIÓN 259
Ejercicio 6.37 Calcular∫
x2√x2 − 16
dx.
Solución.
En gráfico que corresponde es
��������
z
x√x2 − 16
4
el cambio de variable es sec z =x
4, luego
x = 4 sec zdx = 4 sec z tan z dz√
x2 − 16 = 4 tan z
con este cambio de variable tenemos:∫
x2√x2 − 16
dx =
∫16 sec2 z
4 tan z4 sec z tan z dz
= 16
∫sec3 z dz
= 8 ln |sec z + tan z|+ 8 tan z sec z= 8 ln
∣∣14x+ 1
4
√x2 − 16
∣∣+ 12x√x2 − 16 +K
= 8 ln∣∣x+
√x2 − 16
∣∣+ 12x√x2 − 16 + C
(C = K − 8 ln 4)
Ejercicios propuestos
1.∫(x2 + 1)
3/2dx.
Sol.:14x(√x2 + 1
)3+ 3
8x√x2 + 1 + 3
8ln∣∣√x2 + 1 + x
∣∣+ C.
2.∫ x+ x2√
1− x2dx.
Sol.: −√1− x2 − 1
2x√1− x2 + 1
2arcsin x+ C.
3.∫ x2√
9− x2dx.
Sol.: −12x√9− x2 + 9
2arcsin 1
3x+ C.
260 CAPÍTULO 6. CÁLCULO INTEGRAL
4.∫ 1
x2√x2 − 16
dx
Sol.: 116x
√(x2 − 16) + C.
5.∫ 1(x+ 1
2
)√x2 + x+ 1
dx.
Sol.: 2√33
(ln(2√x2 + x+ 1−
√3)− ln (2x+ 1)
)+ C.
6.∫x3√4− x2dx.
Sol.: −15x2(√4− x2
)3 − 815
(√4− x2
)3+ C.
7.∫ 1
(9 + x2)2dx.
Sol.: 118
x
9 + x2+ 1
54arctan 1
3x+ C.
8.∫ x+ 2
x2 − 6x+ 10dx
Sol.: 12ln (x2 − 6x+ 10) + 5 arctan (x− 3) + C.
9.∫
x+ 2
x2 + 6x+ 10dx
Sol.: 12ln (x2 + 6x+ 10)− arctan (x+ 3) + C.
10.∫√4− x2x
dx.
Sol.:√4− x2 + 2 ln
∣∣∣∣2−
√4− x2x
∣∣∣∣+ C.
11.∫ 1
(9− x2)3/2dx.
Sol.:1
9
x√9− x2
.
12.∫ x2√
x2 − 1dx.
Sol.: 12x√x2 − 1 + 1
2ln(x+
√x2 − 1
)+ C.
13.∫ √
x2 + x+ 5 dx.
Sol.:14(2x+ 1)
√(x2 + x+ 5) + 19
8ln(2√x2 + x+ 5 + 2x+ 1
)+ C.
14.∫ 5√
x2 − 4x+ 9dx.
Sol : 5 ln(√x2 − 4x+ 9 + x− 2
)+ C
6.3. INTEGRACIÓN POR FRACCIONES PARCIALES 261
15.∫ x√1− x2 +
(√1− x2
)3dx.
Sol.: − arctan(√1− x2
)+ C
6.3 Integración por Fracciones Parciales
6.3.1 Preliminares algebraicos
Inicialmente se enuncian sin demostración algunos resultados del álgebra elemental. Como sesabe, si an �= 0, la expresión p (x) = a0 + a1x+ a2x
2 + · · ·+ anxn se llama polinomio en x degrado n.
Teorema 6.25 Todo polinomio a0 + a1x+ a2x2 + · · ·+ anxn tiene a lo sumo n raíces realesdistintas.
Observación. Un polinomio puede no tener raíces reales (Ej. x2 + 1).
Teorema 6.26 Todo polinomio se puede factorizar en factores con coeficientes reales de laforma (Ax+B) y (ax2 + bx+ c2), donde ax2 + bx+ c2 es irreducible, esto es, b2 − 4ac < 0.
En esta sección nos interesan cocientes de polinomios en donde el grado del numerador esestrictamente menor que el grado del denominador; si este no es el caso, por simple divisiónpuede llevarse a la forma de un polinomio más un cociente con la forma deseada.
Ejemplo 6.16
x4 − x2 + 5x2 + 1
= x2 − 2 + 7
x2 + 1
6.3.2 Fracciones parciales
Si enP (x)
Q (x)el grado de P (x) es estrictamente menor que el grado de Q (x) entonces es posible
escribirP (x)
Q (x)como suma de funciones racionales más simples de la forma:
A
ax+ b,
oAx+B
ax2 + bx+ c.
De acuerdo a los factores del polinomio Q (x) podemos tener los siguientes casos:
262 CAPÍTULO 6. CÁLCULO INTEGRAL
Factores lineales: ax+ b
La regla es la siguiente: A cada factor
(ax+ b)m
le corresponde la sumaA1
ax+ b+
A2(ax+ b)
+ · · ·+ Am
(ax+ b)m
en donde los Ai son constantes a determinar
Ejemplo 6.17 Sea f (x) =x2 + 5
(x− 1) (x− 2)2, entonces f se puede expresar como la suma de
expresiones racionales más simples.Al factor (x− 1) le corresponde
B
x− 1 ,
en donde B es una constante a determinar.Al factor (x− 2)2 le corresponde la suma
A1x− 2 +
A2
(x− 2)2,
en donde A1 y A2 son constantes a determinar.Entonces f puede escribirse como
f (x) =B
x− 1 +A1x− 2 +
A2
(x− 2)2
Factores cuadráticos: ax2 + bx+ c
La regla a aplicar es la siguiente: A cada factor(ax2 + bx+ c
)m
le corresponde la suma
A1x+B1ax2 + bx+ c
+A2x+B2
(ax2 + bx+ c)2+ · · ·+ Amx+Bm
(ax2 + bx+ c)m
en donde los Ai, Bi son constantes a determinar.
Ejemplo 6.18 Sea f (x) =x2 + x+ 1
(x2 + x+ 1) (x2 + 1)2, entonces f se puede expresar como
f (x) =Ax+B
x2 + x+ 1+Cx+D
x2 + 1+Ex+ F
(x2 + 1)2
en donde A,B,C,D,E,F son constantes a determinar.
6.3. INTEGRACIÓN POR FRACCIONES PARCIALES 263
6.3.3 Cálculo de constantes en fracciones parciales
Via ejercicios, en esta sección, ilustramos las técnicas para calcular las constantes en fraccionesparciales.
Ejercicio 6.38 Expresar como suma de fracciones parciales la siguiente función racional.
f (x) =x2 + 5
(x− 1) (x− 2)2.
Solución.x2 + 5
(x− 1) (x− 2)2=
A
x− 1 +B
x− 2 +C
(x− 2)2
quitando denominadores
x2 + 5 = A (x− 2)2 +B (x− 1) (x− 2) + C (x− 1) (1)
el resultado mostrado en (1) es una identidad, esto es, (1) es válido para todo x.Metodo general. Realizando operaciones algebraicas en (1) encontramos
x2 + 5 = (A+B) x2 + (−4A− 3B + C)x+ (4A+ 2B − C)
igualando coeficientes encontramos el sistema de ecuaciones:
A+B = 1−4A− 3B + C = 04A+ 2B − C = 5
resoviendo este sistema encontramos A = 6, B = −5, C = 9, por tanto:x2 + 5
(x− 1) (x− 2)2=
6
x− 1 −5
x− 2 +9
(x− 2)2.
Método abreviado. Puesto que (1) es una identidad, es válido para todo x. Sustituimosvalores de x apropiados, buscamos números x tales que se anulen la mayor cantidad de su-mandos que aparecen en (1).Sustituyendo x = 1 en (1):
6 = A
Sustituyendo x = 2 en (1):9 = C
Hasta ahora hemos logrado calcular A y C. No tenemos más valores que anulen algunossumandos de (1). Elegimos ahora un valor arbitrario, digamos x = 0, sustituyendo este valoren (1) encontramos
5 = 4A+ 2B − C
264 CAPÍTULO 6. CÁLCULO INTEGRAL
de donde despejando B tenemos
B =1
2(5− 4A+ C)
luego puesto que A = 6 y C = 9 tenemos B = −5. Este resultado coincide con el encontradoen el método general. En este método elegimos el valor arbitrario x = 0, debe quedar claroque pudimos haber elegido cualquier otro número real.
6.3.4 Integración por Fracciones parciales
La descomposición de una función racional en fracciones parciales puede aplicarse en la reso-lución de integrales en las cuales el integrando es una función racional.
Ejercicio 6.39 Calcular: I =∫
4x
(2x− 1) (2x+ 1)dx.Solución. Aplicando fracciones parciales al integrando:
Solución. El factor x2 + 1 es irreducible por tanto escribimos
x3 + x− 1(x2 + 1)2
=Ax+B
x2 + 1+Cx+D
(x2 + 1)2
quitando denominadores
x3 + x− 1 = (Ax+B)(x2 + 1
)+ (Cx+D) (1)
266 CAPÍTULO 6. CÁLCULO INTEGRAL
ahora no tenemos valores reales que anulen sumandos de (1). Sin embargo puesto que (1)es una identidad podemos tomar algunos valores de x y sustituirlos en (1) para obtener lassuficientes ecuaciones que nos permitirán encontrar los valores de A,B,C,D. Para los valores−1, 0, 1, 2 encontramos respectivamente las siguientes ecuaciones:
−2A+ 2B − C +D = −3B +D = −1
2A+ 2B + C +D = 110A+ 5B + 2C +D = 9
resolviendo encontramos A = 1, B = C = 0, D = −1. Por tanto∫x3 + x− 1(x2 + 1)2
dx =
∫x
x2 + 1dx−
∫1
(x2 + 1)2dx
resolviendo las integrales de la derecha encontramos:∫
x
x2 + 1dx =
1
2ln (x2 + 1)
∫1
(x2 + 1)2dx =
1
2
(x
x2 + 1
)+1
2arctan x
(2)
por tanto∫x3 + x− 1(x2 + 1)2
dx =1
2ln(x2 + 1
)− 12
(x
x2 + 1
)− 12arctan x+ C
Comentario. La segunda integral que aparece (2) puede resolverse con la sustitución x =tan z (que viene de la sustitución trigonométrica).
Ejercicio 6.43 Calcular∫
x3
2x2 − x− 1dx.Solución. En este caso es necesaria una división pues el numerador es de grado mayor
que el denominador. Dividiendo:
x3
2x2 − x− 1 =1
2x+
1
4+
3x+ 1
4 (2x2 − x− 1) ,
Aplicando fracciones parciales al tercer sumando:
3x+ 1
4 (2x2 − x− 1) =1
12 (2x+ 1)+
1
3 (x− 1)por tanto:
∫x3
2x2 − x− 1dx =
∫1
2xdx+
∫1
4dx+
1
12
∫1
2x+ 1dx+
1
3
∫1
x− 1dx
=1
4x2 +
1
4x+
1
24ln |2x+ 1|+ 1
3ln |x− 1|+ C
6.3. INTEGRACIÓN POR FRACCIONES PARCIALES 267
Ejercicios propuestos
Resolver
1.∫
2x+ 4
8x2 − 14x+ 3dx.
Sol.: − 920ln (4x− 1) + 7
10ln (2x− 3) + C.
2.∫
x2 + 1
(x− 2) (x− 3)2dx.
Sol.:5 ln (x− 2)− 10
x− 3 − 4 ln (x− 3)
3.∫
x
(x− 1) (x− 4) (x− 1)2dx.
Sol.:1
6 (x− 1)2+
4
9 (x− 1) −427ln (x− 1) + 4
27ln (x− 4) + C.
4.∫
sin x
cosx (1 + cos2 x)dx.
Sol.: ln
∣∣∣∣∣
√1 + cos2 x
cosx
∣∣∣∣∣+ C.
5.∫
1
(x3 − 1)2dx.
Sol.: f (x) + g (x) donde:
f (x) = − 1
9 (x− 1) −29ln (x− 1) + 1
9ln (x2 + x+ 1)
g (x) = 29
√3 arctan 1
3(2x+ 1)
√3 + 1
9
x− 1x2 + x+ 1
+ C.
6.∫
1
x3 + 1dx.
Sol.: 13ln (x+ 1)− 1
6ln (x2 − x+ 1) + 1
3
√3 arctan 1
3(2x− 1)
√3 + C.
7.∫
1
x3 − 1dx.
Sol.: 13ln (x− 1)− 1
6ln (x2 + x+ 1)− 1
3
√3 arctan 1
3(2x+ 1)
√3 + C.
8.∫
1
x4 + 1dx.
Sol.: 18
√2 ln
x2 + x√2 + 1
x2 − x√2 + 1
+ 14
√2 arctan
(x√2 + 1
)+
14
√2 arctan
(x√2− 1
)+ C.
268 CAPÍTULO 6. CÁLCULO INTEGRAL
Sug:
x4 + 1 =((x2)2+ 2x2 + 1
)− 2x2 =
=(x2 + 1
)2 − 2x2 =(x2 + 1−
√2x)(
x2 + 1 +√2x)
y entonces:1
x4 + 1=
−√2x+ 2
4(x2 −
√2x+ 1
) +√2x+ 2
4(x2 +
√2x+ 1
)
9.∫
1
x6 + 1dx.
Sol.: 13arctan x− 1
12
√3 ln(x2 −
√3x+ 1
)+ 1
6arctan
(2x−
√3)+
112
√3 ln(x2 +
√3x+ 1
)+ 1
6arctan
(2x+
√3)
(Sug.: observe que x6 + 1 =((x2)
3+ 3 (x2)
2+ 3x2 + 1
)− 3 (x4 + x2) )
10.∫
x2 − 8x+ 7(x2 − 7x+ 6)2
dx.
Sol.: 15(x−6) +
625ln (x− 6)− 6
25ln (x− 1) + C.
11.∫
1
x4 − 2x3 + 2x2 − 2x+ 1dx.
Sol.: − 1
2 (x− 1) −12ln (x− 1) + 1
4ln (x2 + 1) + C.
12.∫
x
x6 + x2dx.
Sol.: ln x− 14ln (x4 + 1) + C.
13.∫
x5
x8 + 1dx.
Sol.: 116
√2 ln
x4 − x2√2 + 1
x4 + x2√2 + 1
+ 18
√2 arctan
(x2√2 + 1
)+
18
√2 arctan
(x2√2− 1
)+ C.
14.∫
x2
(x− 1)2dx.
Sol.: x− 1
x− 1 + 2 ln (x− 1) + C.
15.∫
x4
(x2 + 1) (x2 + x+ 1)dx.
Sol.: x− 12ln (x2 + 1)− 2
3
√3 arctan
(√33(2x+ 1)
)+ C.
6.4. FUNCIONES RACIONALES DEL TIPO F(X,√AX +B
)269
6.4 Funciones racionales del tipo F(x,√ax+ b
)
Si F es una función racional en x y√ax+ b. La integral
∫F(x,√ax+ b
)dx
se racionaliza (integrando racional) con el cambio de variable:
t =√ax+ b
del cambio de variable se deduce:
x =t2 − ba
dx =2t
adt
por tanto ∫F(x,√ax+ b
)dx =
∫F
(t2 − ba
, t
)2t
adt
que es una integral con integrando una función racional en la variable t.
Ejercicios resueltos
Ejercicio 6.44 Calcular I =∫x+
√2x+ 1
1 +√2x+ 1
dx =.
Solución. Realizamos el cambio:t =
√2x+ 1
luego:
x =t2 − 12
dx = t dt
sustituyendo en la integral dada:
I =
∫ t2 − 12
+ t
1 + ttdt =
1
2
∫t3 + 2t2 − t
t+ 1dt
dividiendo la integral toma la forma:
I =1
2
∫ (t2 + t− 2 + 2
t+ 1
)dt.
Integrando y reemplazando en la variable x:
I = 12
(13t3 + 1
2t2 − 2t+ 2 ln |t+ 1|
)+ C
= 16
√(2x+ 1)3 + 1
4(2x+ 1)−
√2x+ 1 + ln
(1 +
√2x+ 1
)+ C
270 CAPÍTULO 6. CÁLCULO INTEGRAL
Ejercicio 6.45 Calcular I =∫x2√x+ 1 dx.
Solución. Realizamos el cambio:t =
√x+ 1
de esto obtenemos:x = t2 − 1dx = 2t dt
sustituyendo en la integral dada :
I =
∫ (t2 − 1
)2t 2tdt =
∫ (2t6 − 4t4 + 2t2
)dt
Integrando:I = 2
7t7 − 4
5t5 + 2
3t3 + C
= 27
√(x+ 1)7 − 4
5
√(x+ 1)5 + 2
3
√(x+ 1)3 + C
Ejercicio 6.46 Calcular∫
x√x− 1√
x− 1 + xdx.
Solución. Con el cambio t =√x− 1 se tiene:
x = t2 + 1dx = 2t dt
luego: ∫x√x− 1√
x− 1 + xdx =
∫(t2 + 1) t
t+ t2 + 1(2t dt)
= 2
∫t4 + t2
t2 + t+ 1dt
= 2
∫(t2 − t+ 1) dt− 2
∫1
t2 + t+ 1dt
= 23t3 − t2 + 2t− 4
3
√3 arctan 1
3(2t+ 1)
√3 + C
en función de la variable x la solución es:∫
x√x− 1√
x− 1 + xdx = f (x) + g (x) + C
donde:f (x) = 2
3
(√x− 1
)3 −(√x− 1
)2+ 2
√x− 1
g (x) = −43
√3 arctan
[13
(2√x− 1 + 1
)√3]
6.5. FUNCIONES RACIONALES DEL TIPO F (SINX,COSX) 271
Ejercicios propuestos
Calcular:
1.∫
1√x− 1− 4
√x− 1dx.
Sol.: 4 ln(4√x− 1− 1
)+ 2 4
√x− 1
(4√x− 1 + 2
)+ C
2.∫ √
x+ 1
(√x)3 − x
dx.
Sol.: 4 ln (√x− 1)− lnx+ C.
3.∫x+
√x+ 1√
x+ 1dx.
Sol.: 23
(√x+ 1
)3 − 2√x+ 1 + x+ C.
4.∫ √
2x− 4x
dx.
Sol.: 2√2x− 4− 4 arctan 1
2
√2x− 4 + C.
5.∫ √
x+ 1 + 1√x+ 1−
(√x+ 1
)3dx.
Sol.: −2 ln(√x+ 1− 1
)
6.∫ √
x+ 2
x+ 1dx.
Sol.: 2√x+ 2 + ln
(√x+ 2− 1√x+ 2 + 1
)+ C
6.5 Funciones racionales del tipo F (sinx, cosx)
Si el integrando es una función racional de este tipo, se puede racionalizar con el cambio devariable
t = tanx
2,
de este cambio de variable se obtiene:
sin x =2t
1 + t2
cosx =1− t21 + t2
x = 2arctan t
dx =2
1 + t2dt
272 CAPÍTULO 6. CÁLCULO INTEGRAL
por tanto : ∫F (sin x, cosx) dx =
∫F
(2t
1 + t2,1− t21 + t2
)2
1 + t2dt
que es una función racional en la variable t.
Ejercicios resueltos
Ejercicio 6.47 Calcular I =∫1 + sin x
cosxdx.
Solución. Con el cambio t = tan x2:
I =
∫
1 +
2t
1 + t2
1− t21 + t2
2
1 + t2dt
=
∫2t2 + 4t+ 2
(1− t2) (1 + t2)dt
simplificando y aplicando fracciones parciales:
2t2 + 4t+ 2
(1− t2) (1 + t2) = −2 (t+ 1)2
(t− 1) (t+ 1) (1 + t2) = −2
t− 1 + 2t
1 + t2
luego:
I = −∫
2
t− 1dt+ 2∫
t
1 + t2dt
= −2 ln |t− 1|+ ln (1 + t2) + C= −2 ln
∣∣tan x2− 1∣∣+ ln
(1 + tan2 x
2
)+ C
Ejercicio 6.48 Calcular I =∫secx dx.
Solución. Con el cambio t = tan x2:
I =
∫1
1− t21 + t2
2
1 + t2dt
=
∫ −2t2 − 1dt
aplicando fracciones parciales:
−2t2 − 1 = −
1
t− 1 +1
t+ 1
6.5. FUNCIONES RACIONALES DEL TIPO F (SINX,COSX) 273
luego:
I =
∫− 1
t− 1dt+∫
1
t+ 1dt
= ln
∣∣∣∣t+ 1
t− 1
∣∣∣∣+ C
= ln
∣∣∣∣tan x
2+ 1
tan x2− 1
∣∣∣∣+ C
tomando en cuenta el resultado:
tanx
2=
sin x
1 + cosx
encontramos:I = ln |secx+ tanx|+ C
Ejercicios propuestos
IMPORTANTE: En las soluciones de los siguientes ejercicios t = tan(x2
).
Calcular:
1.∫
5
1 + 5 cosxdx
Sol.:5√6
12ln
(√2t+
√3√
2t−√3
)
+ C
2.∫
cosx
1 + 5 cosxdx
Sol.: 25arctan t+
√660ln
(√2t−
√3√
2t+√3
)
+ C
3.∫
1
1 + sin x+ cosxdx.
Sol.: ln (t+ 1) + C.
4.∫
1
1 + sin2 xdx
Sol.√22arctan
(√2t+ t
)+
√22arctan
(√2t− t
)+ C
274 CAPÍTULO 6. CÁLCULO INTEGRAL
5.∫
cosx
sin x− cos2 xdx.
Sol. : 15
√5 ln
(2 sin x−
√5 + 1
2 sin x+√5 + 1
)
+ C. (Ind. ¿No es mejor hacer el cambio u = sin x?)
6.∫sin x+ cosx
1 + sinxdx.
Sol.: 2 arctan t− ln (t2 + 1) + 2 ln (t+ 1) + 2
t+ 1+ C.
7.∫2 sin x− cosxsin x− 5 cosxdx.
Sol.: 713arctan t+ 9
26ln
(5t+
√26 + 1
t2 + 1
)
+ 926ln(5t−
√26 + 1
)+ C.
8.∫
1
1 +√1− x2
dx.
Sol. arcsin x+
√1− x2 − 1
x.
Capítulo 7
Integrales impropias (en prueba)
Al definir la integral∫ b
a
f (x) dx se ha considerado el intervalo [a, b] finito, esto es, ninguno
de los extremos a o b podian ser infinitos, además f debia ser una función acotada en [a, b] .Por ejemplo no se ha dado ningún significado a integrales como las que siguen:
∫ ∞
0
1
x2 + 1dx
∫ 3
0
1√9− x2
dx
en este capítulo desarrollamos técnicas para resolver este tipo de integrales.
7.1 Integrales impropias de primera clase
7.1.1 Límite superior infinito
Sea f una función integrable en [a, b] para todo b <∞. La integral∫ ∞
a
f (x) dx
se llama integral impropia de primera clase. Si el límite limb→∞
∫ b
a
f (x) dx existe, entonces
la integral impropia se dice convergente y∫ ∞
a
f (x) dx = limb→∞
∫ b
a
f (x) dx.
Si el límite no existe, se dice que la integral impropia es divergente.
Ejemplo 7.1∫ ∞
0
e−xdx = limb→∞
∫ b
0
e−xdx
= limb→∞
−e−x∣∣b0
= limb→∞
(−e−b + 1
)
= 1
275
276 CAPÍTULO 7. INTEGRALES IMPROPIAS (EN PRUEBA)
por tanto la integral es convergente y∫∞0e−xdx = 1
Ejemplo 7.2
∫ ∞
1
1√xdx = lim
b→∞
∫ b
1
1√xdx
= limb→∞
2√x∣∣b1
= limb→∞
(2√b− 2
)
= ∞
por tanto la integral impropia es divergente.
7.1.2 Límite inferior infinito
Sea f una función integrable en [a, b] para todo −∞ < a. entonces la integral
∫ b
−∞f (x) dx
también se llama integral impropia de primera clase. Si lima→−∞
∫ b
a
f (x) dx existe, entonces
la integral impropia se dice convergente y
∫ b
−∞f (x) dx = lim
a→−∞
∫ b
a
f (x) dx
si el límite no existe, la integral se llama divergente.
7.2 Integrales impropias de segunda clase
7.2.1 No acotada en el limite superior
Consideremos ahora una función f que es integrable en [a, b− ε] para todo ε > 0 y no estáacotada en [a, b) , entonces la integral
∫ b−ε
a
f (x) dx
se llama integral impropia de segunda clase. Si
limε→0+
∫ b−ε
a
f (x) dx
existe, la integral impropia se dice convergente, en caso contrario se dice divergente.
7.2. INTEGRALES IMPROPIAS DE SEGUNDA CLASE 277
Ejemplo 7.3
∫ 2
0
1
2− xdx = limε→0+
∫ 2−ε
0
1
2− xdx
= limε→0+
− ln (2− x)|2−ε0
= limε→0+
(− ln (ε) + ln 2)
como el anterior límite no existe, la integral impropia es divergente.
Ejemplo 7.4
∫ 4
0
1√4− xdx = lim
ε→0+
∫ 4−ε
0
1√4− xdx
= limε→0+
−2√4− x
∣∣4−ε0
= limε→0+
(−2√ε+ 4
)
= 4
por tanto la integral impropia es convergente.
7.2.2 No acotada en el limite inferior
Consideremos ahora una función f que es integrable en [a+ ε, b] para todo ε > 0 y no estáacotada en (a, b] , entonces la integral
∫ b
a+ε
f (x) dx
también se llama integral impropia de segunda clase. Si
limε→0+
∫ b
a+ε
f (x) dx
existe, la integral impropia se dice convergente, en caso contrario se dice divergente.
Ejercicios resueltos
Ejercicio 7.1 Calcular∫ ∞
0
1
x2 + 1dx
278 CAPÍTULO 7. INTEGRALES IMPROPIAS (EN PRUEBA)
Solución.
0 1 2 3 4 5 6 7 8 9 10
0.2
0.4
0.6
0.8
1
x
y( )
21
1
xxf
+=
La integral impropia es de primera clase.
∫ ∞
0
1
x2 + 1dx = lim
b→∞
∫ b
0
1
x2 + 1dx
= limb→∞
arctan x|b0= lim
b→∞arctan b
= π/2
así la integral impropia es convergente. Esta integral puede interpretarse como el área bajo
la gráfica de f (x) =1
1 + x2en el intervalo [0,∞) .
Ejercicio 7.2 Calcular: ∫ 1
0
ln xdx
Solución.
0.2 0.4 0.6 0.8 1
-6
-5
-4
-3
-2
-10
1( ) xxf ln=
x
y
La integral es impropia de segunda clase.
∫ 1
0
lnxdx = limε→0+
∫ 1
0+ε
lnx dx
= limε→0+
x ln x− x|1ε= lim
ε→0+(−1− ε ln ε+ ε)
7.2. INTEGRALES IMPROPIAS DE SEGUNDA CLASE 279
Aplicando la recla de Hopital:
limε→0(ε ln ε) = lim
ε→0+ln ε
1/ε
= limε→0+
1/ε
−1/ε2 = limε→0−ε= 0
entonces:∫ 1
0
ln xdx = limε→0+
(−1− ε ln ε+ ε)
= −1− limε→0+
(ε ln ε)
= −1
por tanto la integral dada es convergente.
Ejercicio 7.3 Calcular: ∫ ∞
0
1
(1 + x)2dx
Solución.
0 2 4 6 8 10
0
0.2
0.4
0.6
0.8
1
x
y ( )( )21
1
xxf
+=
La integral impropia es de primera clase.∫ ∞
0
1
(1 + x)2dx = lim
b→∞
∫ b
0
1
(1 + x)2dx
= limb→∞
− 1
1 + x
∣∣∣∣b
0
= limb→∞
(− 1
1 + b+ 1
)
= 1
por tanto la integral impropia converge.
Ejercicio 7.4 Calcular: ∫ ∞
0
1√1 + x
dx
280 CAPÍTULO 7. INTEGRALES IMPROPIAS (EN PRUEBA)
Solución.
0 5 10 15 20
0.2
0.4
0.6
0.8
1( )
xxf
+=
1
1
x
y
La integral es impropia de primera clase:
∫ ∞
0
1√1 + x
dx = limb→∞
∫ b
0
1√1 + x
dx
= limb→∞
2√1 + x
∣∣∣b
0
= limb→∞
(2√1 + b− 2
)
= ∞
por tanto la integral impropia diverge.
Ejercicio 7.5 Calcular: ∫ 5
0
x
(25− x2)3/2dx
Solución.
0 1 2 3 4 5
1
2
3
4
5
xx
y ( ) ( ) 2/3225 x
xxf
−=
La integral impropia es de segunda clase.
∫ 5
0
x
(25− x2)3/2dx = lim
ε→0+
∫ 5−ε
0
x
(25− x2)3/2dx
= limε→0+
1√(25− x2)
∣∣∣∣∣
5−ε
0
7.2. INTEGRALES IMPROPIAS DE SEGUNDA CLASE 281
= limε→0+
1√25− (5− ε)2
− 15
= limε→0+
(1√
10ε− ε2− 15
)
= ∞
por tanto la integral es divergente.
Ejercicio 7.6 Calcular: ∫ ∞
0
e−x sin x dx
Solución.
0 2 4 6 8 10-0.1
0.1
0.2
0.3
0.4
x
( ) ( )xexf x sin−=
x
y
La integral es impropia de primera clase. Un cálculo da:∫e−x sin x dx = −1
2e−x (cosx+ sin x)
luego:
∫ ∞
0
e−x sin x dx = limb→∞
∫ b
0
e−x sin x dx
= limb→∞
−12e−x (cosx+ sin x)
∣∣∣∣b
0
= −12limb→∞
(e−b (cos b+ sin b)− 1
)
=1
2
Ejercicios propuestos
Clasificar y calcular las siguientes integrales impropias.
1.∫ π/2
0
cos−2 x dx Sol. Div.
282 CAPÍTULO 7. INTEGRALES IMPROPIAS (EN PRUEBA)
2.∫ 3
0
1√9− x2
dx Sol.1
2π
3.∫ 4
0
13√x− 1dx Sol.
3
2
(3√9− 1
)(Sug. Existe una discontinuidad en 1)
4.∫ π/2
0
secxdx Sol. Div
5.∫ π/2
0
cosx√1− sin xdx Sol. 2
6.∫ 0
−∞e2xdx Sol.
1
2
7.∫ ∞
−∞
1
e−x + exdx Sol.
1
2π
8.∫ ∞
−∞
1
1 + 4x2dx Sol. π/2
9.∫ ∞
−∞|x| e−x2dx = Sol. 1
10.∫ ∞
2
1
x ln2 xdx Sol. 1
ln 2
11. Demostrar que∫ ∞
0
1
xpdiverge para todos los valores de p.
12. Demostrar que∫ ∞
a
1
xpdx existe para p > 1 y es divergente para p ≤ 1.
13. Demostrar que∫ b
a
1
(x− b)pdx existe para p < 1 y es divergente para p ≥ 1
14. Para cierto real c la integral∫ ∞
2
(cx
x2 + 1− 1
2x+ 1
)dx
converge. Determinar el valor de c y evaluar la integral. Sol. 1/2,1
4ln5
4
15. Para cierto real c la integral∫ ∞
0
(1√
1 + 2x2− c
x+ 1
)dx
converge. Determinar el valor de c y evaluar la integral. Sol.1
2
√2,3√2ln√2
7.2. INTEGRALES IMPROPIAS DE SEGUNDA CLASE 283
16. Para cierto real c la integral∫ ∞
1
(x
2x2 + 2c− c
x+ 1
)dx
converge. Determinar el valor de c y evaluar la integral. Sol.1
2,1
4ln8
3
17. Encontrar los valores de a, b, c tales que∫ ∞
1
(2x2 + bx+ a
x (2x+ a)− 1)dx = 1
Sol. a = b = 2e− 2.
284 CAPÍTULO 7. INTEGRALES IMPROPIAS (EN PRUEBA)
Capítulo 8
Cálculo de áreas planas
En el capítulo 6, la integral estuvo inspirada en el cálculo de áreas. Sabemos que si f : [a, b]→R es una función continua no negativa, el área limitada por:
la curva dada por f , las rectas x = a, x = b y el eje x ,
está dado por:
A =∫ baf (x) dx.
En este capítulo se dan técnicas para calcular áreas encerradas por curvas, tales técnicas sejustifican fácilmente usando la definición de integral.
8.1 Regiones acotadas
Definición 8.1 (Región acotada) Una región R en R2 es acotada si puede inscribirse enel interior de un rectángulo de lados finitos.
Ejemplo 8.1 Considérese las regiones R1 y R2 definidas por:
R1 ={(x, y) : x2 + 1 ≤ y, y ≤ x+ 3
}
R2 = {(x, y) : x+ y ≤ 2}
-1 0 1 2
1
2
3
4
5
-1 0 1 2
1
23+= xy
12 += xy
2=+ yx
xx
yy
Región acotada Región no acotada
RRRR1RRRR2
285
286 CAPÍTULO 8. CÁLCULO DE ÁREAS PLANAS
Definición 8.2 (Región tipo I) Una región acotada es llamada región tipo I, denotado porRX , si es de la forma:
RX = {(x, y) : a ≤ x ≤ b, g (x) ≤ y ≤ h (x)} ,
donde g y h son continuas en [a, b] con g (x) ≤ h (x) para todo x ∈ [a, b] .
Definición 8.3 (Región tipo II) Una región acotada es llamada región tipo II, denotadopor RY , si es de la forma:
RY = {(x, y) : a ≤ y ≤ b, g (y) ≤ x ≤ h (y)} .
donde g y h son continuas en [a, b] con g (y) ≤ h (y) para todo y ∈ [a, b] .
a b
( )xgy =
( )xfy =ax=
bx=
x
y
d
c
( )ygx =
( )yfx =
dy =
cy =x
yRegión tipo I Región tipo II
Toda región acotada puede considerarse como la unión de regiones tipo I o tipo II.
Área de una región tipo I y tipo II. El área de una región tipo I está dadopor:
∫ b
a
(h (x)− g (x)) dx,
y el área de una región tipo II está dado por:
∫ b
a
(h (y)− g (y)) dy.
8.1. REGIONES ACOTADAS 287
Ejercicios resueltos
Ejercicio 8.1 Hallar el área limitada por h (x) = 2x− x2 y el eje x.
0 0.4 0.8 1 1.4 1.8 2
0.2
0.4
0.6
0.8
1
( ) 22 xxxh −=
( ) 0=xg
x
y
Solución. La curva corta al eje x en los puntos 0 y 2. La curva puede considerarse comouna región tipo I en el intervalo [0, 2] con ecuaciones:
y = 0
y = 2x− x2x = 0
x = 2,
Por tanto el área es:
A =
∫ 2
0
(h (x)− g (x)) dx =∫ 2
0
(2x− x2) dx
= x2 − 13x3∣∣20
= 43
Ejercicio 8.2 Hallar el área encerrada por las gráficas de f (x) = 3x2 − 2 y g (x) = x2/3.
Solución. Las dos curvas se intersectan en (−1, 1) y (1, 1) . La región puede considerarsecomo una región tipo I en [−1, 1] con ecuaciones
y = 3x2 − 2y = x2/3
x = −1x = 1,
288 CAPÍTULO 8. CÁLCULO DE ÁREAS PLANAS
.
-1 -0.8 -0.4 0 0.4 0.8 1
-2
-1.5
-1
-0.5
0.5
1
( ) 3/2xxg =
( ) 23 2 −= xxf
x
y
El área se calcula como sigue:
A =
∫ 1
−1(g (x)− f (x)) dx
=
∫ 1
−1
(x2/3 − 3x2 + 2
)dx
=16
5
Observación. El área puede calcularse también como: A = 2∫ 10
(x2/3 − 3x2 + 2
)dx.
Ejercicio 8.3 Hallar el área encerrada por la circunferencia dada por x2 + y2 = R2.
Solución.222 Ryx =+
xR
R−
R−
R
La región del primer cuadrante puede considerarse como una región tipo I en el intervalo[0, R] con ecuaciones:
y = 0
y =√R2 − x2
x = 0
x = R
8.1. REGIONES ACOTADAS 289
Por otra parte el área buscada es cuatro veces el área, que aparece en el primer cuadrante,luego el área total encerrada por la circunferencia es:
A = 4
∫ R
0
√R2 − x2dx (1)
con el cambio x = R sin z, tenemos dx = R cos z dz y√R2 − x2 = R cos z, además
x = 0 ⇒ z = 0x = R ⇒ z = π/2
reemplazando en (1) se tiene:
A = 4R2π/2∫
0
cos2 z dz
= 4R2π/2∫
0
1
2(1 + cos 2z) dz
= 2R2(z +
1
2sin 2z
)∣∣∣∣π/2
0
= 2R2(π2
)
= πR2
Ejercicio 8.4 Hallar el área encerrada por f (x) = x3 y g (x) = x.
Solución. Las curvas se intersectan en (1, 1) , (0, 0) y (−1,−1)
-1 -0.6-0.2
0 0.2 0.6 1
-0.6
-0.2
0.2
0.6
1
1
x
y
( ) xxg =
( ) 3xxf =
�
�X
Y
���������������1 g(x) = x
f(x) = x3
1
−1
−1
���
���
En este caso se tienen dos regiones tipo I. La primera región en [−1, 0] y la segunda en [0, 1] ,
290 CAPÍTULO 8. CÁLCULO DE ÁREAS PLANAS
en ambos casos intervienen las funciones f y g.
A =
∫ 0
−1(f (x)− g (x)) dx+
∫ 1
0
(g (x)− f (x)) dx
=
∫ 0
−1(x3 − x) dx+
∫ 1
0
(x− x3) dx
=1
2.
Ejercicio 8.5 Hallar el área encerrado por f (x) = x3 y g (x) = 3x2 + 10x.
Solución. f y g se intersectan en (−2,−8) , (0, 0) y (5, 125) .
-2 0 2 4 5-8
20
60
100
125
( ) 3xxf =
xx 103 2 +
x
y
El área está dado por:
A =
∫ 0
−2(f (x)− g (x)) dx+
∫ 5
0
(g (x)− f (x)) dx
=
∫ 0
−2(x3 − 3x2 − 10x) dx+
∫ 5
0
(3x2 + 10x− x3) dx
= 4074
Ejercicio 8.6 Hallar la menor área encerrada por las curvas
y2 = −x2 + 8x− 12y2 = 2x− 4
Solución. Las dos curvas se intersectan en los puntos (2, 0) , (4,−2) y (4, 2) . La menor área
8.1. REGIONES ACOTADAS 291
se ilustra en siguiente gráfico.
1 2 3 4 5 6
-2
-1
0
1
2
x
y
0422 =+− xy
0128 22 =++− yxx
El área que aparece por arriba del eje x es igual al área que aparece por debajo, por tanto elárea buscada es
A = 2
∫ 4
2
(√−x2 + 8x− 12−
√2 (x− 2)
)dx
= −163+ 2π.
Ejercicio 8.7 Hallar el área comprendida entre la curva de agnesi y =1
1 + x2y la parábola
y = 12x2
Solución. Graficando:
-1 -0.6 -0.2 0 0.2 0.6 1
0.2
0.6
1
x
y
( ) 221 xxg =
( )21
1
xxf
+=
Observemos que el área a la derecha del eje y es igual al área de la izquierda, luego
A = 2
∫ 1
0
(1
1 + x2− x2
2
)dx
= 2
(arctan x− x3
6
)∣∣∣∣1
0
= 2 (π/4− 1/6)
=π
2− 13.
292 CAPÍTULO 8. CÁLCULO DE ÁREAS PLANAS
Ejercicio 8.8 Hallar el área encerrada por las curvas dadas por
f (x) = x4 − 9x2g (x) = 9− x2
Solución. f y g se intersectan en (−3, 0) y (3, 0) .
-3 -2 -1 0 1 2 3
-20
-15
-10
-5
5
9
x
y
( ) 24 9xxxf −=
( ) 29 xxg −=
A = 2
∫ 3
0
[(9− x2)− (x4 − 9x2)] dx
= 2
∫ 3
0
(9 + 8x2 − x4) dx
= 5045
Ejercicio 8.9 Hallar el área encerrada por las curvas dadas por
f (x) = x3 − 9xg (x) = 4x+ 12
Solución. Los puntos de intersección de las curvas son los puntos (−3, 0) , (−1, 8) y (4, 28)como se muestra en la figura.
-3 -1 0 1 3 4
-10
5
15
28 ( ) 124 += xxg
( ) xxxf 93 −=
x
y
8.1. REGIONES ACOTADAS 293
Observemos que en este se tiene dos regiones tipo I una en [−3,−1] y [1.4] .
A =
∫ −1
−3[(x3 − 9x)− (4x+ 12)] dx+
∫ 4
−1[(4x+ 12)− (x3 − 9x)] dx
=
∫ −1
−3(x3 − 13x− 12) dx+
∫ 4
−1(−x3 + 13x+ 12) dx
= 4074.
Ejercicio 8.10 Hallar el área comprendida entre la parábola x = 9− y2 y la recta x = 2.
Solución. El área buscada se ilustra en la siguiente gráfica. La región puede considerarsecomo región del tipo II.
0 2 4 6 8 9
-3
-2
-1
1
2
3
2=x
29 yx −=
x
y
intersectando las curvas dadas se encuentra:
x = 9− y2x = 2,
resolviendo encontramos los puntos de intersección(2,−
√7)y(2,√7), por tanto:
A =
∫ √7
−√7
(9− y2 − 2) dy
= 2
∫ √7
0
(7− y2) dy
= 2
(7y − 1
3y3)∣∣∣∣
y=√7
y=0
=28
3
√7
Observación. El área puede calcularse también como
A = 2
∫ 9
2
√9− x dx
294 CAPÍTULO 8. CÁLCULO DE ÁREAS PLANAS
Ejercicio 8.11 Calcular el área encerrada por las curvas
x = y2 + 2y − 8x = 2y
Solución. El área buscada puede considerarse como la correspondiente a una región tipo II.Se muestra en la siguiente gráfica
-10 -5 0 5
-4
-3
-1
1
3( )22,24
( )22,24 −−
02 =− yx
0822 =+−− yyx
x
y
Debemos observar que las dos curvas se intersectan en los puntos(−4√2,−2
√2)y(4√2, 2
√2).
El área es:
A =
∫ 2√2
−2√2
[2y − (y2 + 2y − 8)] dy
=
∫ 2√2
−2√2
(−y2 + 8) dy
=[−13y3 + 8y
]2√2−2√2=64
3
√2.
Ejercicios
1. En los siguientes ejercicios hallar el área entre el eje x y la curva dada por y = y (x) .
(a) y = x2 − 2x. Sol. 4/3(b) y = x3 − x. Sol. 1/2(c) y = x−√x. Sol. 1/6(d) y = (x+ 2) (x2 − 1) . Sol. 37/12(e) y = 3
√x− x. Sol. 27/2
2. Hallar el área limitada por las curvas:
(a) y2 = 6x, x2 = 6y. Sol.: 12
(b) xy = a2, y = 0, x = a, x = 2a y a > 0. Sol.: a2 ln 2.
8.1. REGIONES ACOTADAS 295
(c) y = xex, y = 0, x = 4. Sol.: 3e4 + 1.
(d) x2/3 + y2/3 = a2/3, a una constante. Sol.: 3a2π8.
a
a−
a−
a
x
y
3/23/23/2 ayx =+
La curva se llama hipocicloide de cuatro picos.
(e) y = x3, y = 0, x = 1, x = 3. Sol. 20.
(f) y = 4x− x2, y = 0, x = 1, x = 3. Sol. 22/3.
(g) x = 1 + y2, x = 10, Sol.: 36.
(h) x = 3y2 − 9, x = 0, y = 0, y = 1. Sol.: 8.(i) x = y2 + 4y + 2, x = 2. Sol.:32/3.
(j) y = 9− x2, y = x+ 3. Sol.: 125/6.(k) y = 2− x2, y = −x. Sol.:9/2.(l) x2
a2+ y2
b2= 1. Sol.: πab.
(m) y = ex, y = e−x, x = 0, x = 2. Sol.: e2 + 1/e2 − 2.(n) xy = 12, y = 0, x = 1, x = e2. Sol.: 24.
3. En los siguientes ejercicios calcular el área de la región entre los gráficos de f y g sobreel intervalo [a, b] especificado.
(a) f (x) = 4− x2, g (x) = 8− 2x2 , [−2, 2] . Sol.: 32/3(b) f (x) = x3 + x2, g (x) = x3 + 4, [−2, 2] . Sol.: 32/3(c) f (x) = x− x2, g (x) = −x, [0, 2] . Sol.: 4/3(d) f (x) = x1/3, g (x) = x1/2, [0, 1] . Sol.: 1/12
(e) f (x) = x1/3, g (x) = x1/2, [1, 2] . Sol.: 4√23− 3(21/3)
2+ 1
12
(f) f (x) = x1/3, g (x) = x1/2, [0, 2] . Sol.: 4√23− 3(21/3)
2+ 1
6
296 CAPÍTULO 8. CÁLCULO DE ÁREAS PLANAS
(g) f (x) = x1/2, g (x) = x2, [0, 2] . Sol.: 13
(10− 4
√2)
(h) f (x) = x2, g (x) = x+ 1,[−1,(1 +
√5)/2]. Sol.: 1
4
(5√5− 3
)
(i) f (x) = x (x2 − 1) , g (x) = x,[−1,
√2]. Sol.: 7
4
(j) f (x) = |x| , g (x) = x2 − 1, [−1, 1] . Sol.: 73
(k) f (x) = |x− 1| , g (x) = x2 − 2x, [0, 2] . Sol.: 73
(l) f (x) = 2 |x| , g (x) = 1− 3x3,[−√3/3, 1/3
]. Sol.: 9
√3−127
(m) f (x) = |x|+ |x− 1| , g (x) = 0, [−1, 2] . Sol.: 5
4. El gráfico de f (x) = x2 y g (x) = c x3, donde c > 0, intersecta al punto (0, 0) y(1/c, 1/c2) . Encontrar c tal que la región que yace entre esos gráficos sobre el intervalo[0, 1/c] tiene área igual a 2
3.
Sol. 12.
5. Sea f (x) = x − x2, g (x) = ax. Determine a tal que la región sobre el gráfico de g ybajo el gráfico de f tiene área 9
2.
Sol. a = −2.
6. Calcular el área limitada por la cisoide y2 =x3
2a− x y su asíntota x = 2a (a > 0) .
Sol.: πa2.
Capítulo 9
Longitud de Arco
Supóngase que una curva C es generada por la función f definida por y = f (x) desde x = ahasta x = b, en este capítulo se da una fórmula para calcular la longitud de tal curva C.
Teorema 9.1 Sea f una función diferenciable definida en un intervalo cerrado [a, b] . Sea Cla curva generada por f. Entonces la longitud de la curva C está dada por :
L =
∫ b
a
√1 + {f ′ (x)}2 dx.
Demostración. Algunos detalles de la demostración se pueden observar en elsiguiente gráfico.
x
y
kx1−kx bxn =ax =0
yk∆
xk∆
0P1−kP
nP
kP
x
y
ba
Consideremos la partición
P = {a = x0, x1, . . . , xn = b} ,
del intervalo [a, b] . En un intervalo [xk−1, xk] la cuerda que une los puntos Pk−1 yPk, tiene longitud:
Pk−1Pk =
√(∆kx)
2 + (∆ky)2 =
√
1 +
{f (xk−1)− f (xk)
xk−1 − xk
}2∆kx, (i)
297
298 CAPÍTULO 9. LONGITUD DE ARCO
Debe observarse que se han usado las igualdades:
∆kx = xk−1 − xk∆ky = f (xk−1)− f (xk) .
La suma de todas las longitudes Pk−1Pk es una aproximación a la longitud verda-dera. Tendremos la longitud exacta cuando ‖P‖ → 0.
Por otra parte, por el Teorema del Valor Medio aplicado a la función f en elintervalo [xk−1, xk] , existe un número ξk ∈ [xk−1 − xk] tal que
f ′ (ξk) =f (xk−1)− f (xk)
xk−1 − xk. (ii)
Reemplazando (ii) en (i) encontramos
Pk−1Pk =
√1 + {f ′ (ξk)}2∆kx.
Haciendo ‖P‖ → 0 , la longitud de la curva está dada por:
L = lim‖P‖→0
n∑
k=1
√1 + {f ′ (ξk)}2∆kx =
∫ b
a
√1 + {f ′ (x)} dx
�
Ejercicios resueltos
Ejercicio 9.1 Dado f (x) = 14x2 − 1
2ln x, x ∈ [1, 2] , hallar la longitud de arco desde x = 1
hasta x = 2.
Solución.
f ′ (x) =1
2x− 1
2x.
Por tanto:
L =
∫ 2
1
√
1 +
(1
2x− 1
2x
)2dx. (i)
La integral que aparece en (i) se puede escribir como
∫ √
1 +
(1
2x− 1
2x
)2dx =
∫ √
1 +
(x2 − 12x
)2dx (ii)
Con el cambio sec z = x:tan z =
√x2 − 1
sec z tan z dz = dx
299
reemplazando lo anterior en (ii):
∫ √
1 +
(1
2x− 1
2x
)2dx =
∫ √
1 +
(tan2 z
2 sec z
)2sec z tan z dz
= 12
∫ √4 sec2 z + tan4 z tan z dz.
(iii)
Usando la identidad tan2 z = sec2 z − 1 obtenemos 4 sec2 z + tan4 z = (sec2 z + 1)2 , luego:
∫ √1 +(12x− 1
2x
)2dx = 1
2
∫(sec2 z + 1) tan z dz
= 12
(12sec2 z − ln (cos z)
)
= 14x2 − 1
2ln(1x
)+ C
(iv)
Finalmente la longitud de arco es:
L =
∫ 2
1
√
1 +
(1
2x− 1
2x
)2dx
= 14x2 − 1
2ln
(1
x
)∣∣∣∣2
1
= 34+ 1
2ln 2.
Por tanto la longitud buscada es L = 34+ 1
2ln 2 � 1.0966 unidades de longitud..
Ejercicio 9.2 Hallar la longitud del arco de la curva f (x) = 16x3 + 1
2xdesde x = 1 hasta
x = 3.
Solución. La derivada es:
f ′ (x) =1
2x2 − 1
2x2
L =
∫ 3
1
√
1 +
(1
2x2 − 1
2x2
)2dx
=1
2
∫ 3
1
(1 + x4
x2
)dx
=1
2
(− 12x+1
3x3)∣∣∣∣
3
1
= 143.
Por tanto la longitud buscada es 143, esto es, 4.6667 unidades de volumen.
300 CAPÍTULO 9. LONGITUD DE ARCO
Ejercicio 9.3 Hallar la longitud de arco de la curva dada en su forma paramétrica porx = e−t cos t, y = e−t sin t, 0 ≤ t ≤ 4π.Solución. Para resolver este problema observemos que con y = f (x) se obtiene:
∫ √1 + {f ′ (x)}2 dx =
∫ √
1 +
{dy
dx
}2dx
=
∫ √(dx
dt
)2+
(dy
dt
)2dt.
Lo anterior nos da una fórmula para calcular la longitud de arco cuando la curva está en suforma paramétrica. Derivando respecto a la variable t se obtiene:
dx
dt= e−t (− cos t− sin t)
dy
dt= e−t (− sin t+ cos t)
Por tanto: (dx
dt
)2+
(dy
dt
)2= 2e−2t,
luego:
L =
∫ 4π
0
√(dx
dt
)2+
(dy
dt
)2dt.
=√2
∫ 4π
0
e−t dt =√2 (1− e−4π) .
A continuación se muestra la gráfica de esta curva
0 0.2 0.4 0.6 0.8 1
-0.2
0.2
0.4
x
y ( )tt tt sine,cose −−
Ejercicios propuestos
1. En los siguientes ejercicios encontrar la longitud de arco con las condiciones dadas.
(a) y = x3/2, 0 ≤ x ≤ 5.Sol.: 335
27.
301
(b) y = 12(ex + e−x) , 0 ≤ x ≤ 2.
Sol.: 12(e4 − 1) e−2.
(c) y =√36− x2, 0 ≤ x ≤ 4.
Sol.: 6 arcsin (2/3) .
(d) y3 = x2, 0 ≤ x ≤ 8.Sol.: 8
27
(103/2 − 1
).
(e) y2 = 2px, desde el vértice a un extremo del lado recto.Sol.: p
√22+ p
2ln(1 +
√2).
(f) y2/3 + x2/3 = a2/3, a una constante positiva.Sol.: 6a.
Sug. La curva dada se llama astroide (también hipocicloide) y es simétrica conrespecto a los ejes x e y. Su gráfica es:
a
a−
a−
a
x
y
3/23/23/2 ayx =+
(g) y = ln x,√3 ≤ x ≤
√8.
Sol.: 1 + 12ln 3
2.
(h) y = arcsin (e−x) , 0 ≤ x ≤ 1.Sol.: ln
(e+
√e2 − 1
).
(i) La parte cerrada de 9ay2 = x (x− 3a)2 .Sol.: 2a
√3
(j) y = ln(coth x
2
), a ≤ x ≤ b, 0 < a < b.
Sol.: ln(e2b − 1e2a − 1
)+ a− b.
(k) x = a (cos t+ t sin t) , y = a (sin t− t cos t) , desde t = 0 hasta t = T.Sol.: 1
2aT 2.
(l) x = a (2 cos t− cos 2t) , y = a (2 sin t− sin 2t) .Sol.: 16a.
302 CAPÍTULO 9. LONGITUD DE ARCO
(m) x = 5t− 2, y = 2t+ 8 desde t = 1 hasta t = 5.Sol.: 4
√29
2. Expresar la longitud de cada una de las curvas como una integral definida.
(a) Un arco de la gráfica de la función seno.
(b) y =∫ x
1
1tdt desde x = 1
2hasta x = 2.
Capítulo 10
Cálculo de Volúmenes
En este capítulo se dan dos técnicas para calcular volúmenes de sólidos que se forman porrotación de ciertas áreas planas. En ambas técnicas se usa la sencilla idea de aproximar elvolumen mediante cilindros sólidos o cilindros huecos cuyos volúmemes son conocidos. Acontinuación se recuerdan las fórmulas para el cálculo del volumen de un cilindro sólido y uncilindro hueco.
r
h h
2r
1r
hr
h
r
2 Volumen
Altura
Radio
π=
==
( )hrr
h
r
r
21
22
2
1
Volumen
Altura
menor Radio
menor Radio
−=
===
π
• Cilindro sólido (disco). Un cilindro sólido de radio r y altura h tiene volumen = πr2h.
• Cilindro hueco (anillo). Un cilindro hueco de radio menor r1, radio mayor r2 y altura htiene volumen V = π (r22 − r21)h
10.1 Método de los cilindros sólidos
Teorema 10.1 Considérese un área finita del primer cuadrante limitada por:
y = f (x) , x = a, x = b, y = c
Supóngase que dicha área rota al rededor de la recta y = c, generando un sólido de volumenV. Entonces:
V = π
∫ b
a
[f (x)− c]2 dx.
303
304 CAPÍTULO 10. CÁLCULO DE VOLÚMENES
Este método es también conocido como método del disco.
Demostración. Detalles de la demostración se observan en los siguientes gráficos.
a b x
y
cy =
( )xfy =
a b x
y
cy =
( )xfy =
rota queRegión
rotaciónpor obtenido Sólido
ax =0 bxn =x
y
cy =
( )xfy =
1−kx kx
rota que Rectángulo
kξ
( )( )kk f ξξ ,
( ) cf k −= ξ Radio
1 Altura −−=∆= kkk xxx
rotación lapor obtenido Cilindro
Debemos observar que el eje de rotación es parte del área que rota.
Consideremos una partición P = {a = x0, x1, . . . , xn = b} del intervalo [a, b] To-mando un intervalo [xk−1, xk] , se dibuja en el área plana un rectángulo perpen-dicular al eje de rotación. Tal rectángulo tiene base ∆kx = xk − xk−1 y alturaigual a f (ξk)− c, donde ξk ∈ [xk−1, xk] . Al hacer rotar este rectángulo alrededorde la recta y = c se genera un cilindro sólido con las siguientes dimensiones:
Radio = f (ξk)− cAltura = ∆kx,
por tanto el volumen de tal cilindro es
π (f (ξk)− c)2∆kx
10.1. MÉTODO DE LOS CILINDROS SÓLIDOS 305
La suma de los volúmenes de todos los cilindros es una aproximación al volumenbuscado, si V es la aproximación, escribimos:
V ≈n∑
k=1
π [f (ξk)− c]2∆kx
Si ‖P‖ → 0, se debe tener el volumen exacto esto es:
V = lim‖P‖→0
n∑
k=1
π [f (ξk)− c]2∆kx =
∫ b
a
π [f (x)− c]2 dx
Observación. En lo que sigue, en lugar de (ξk, f (ξk)) escribiremos simplemente (x, f (x))o más brevemente (x, y) , también en lugar de ∆kx escribiremos ∆x o más brevemente dx.
Ejemplo 10.1 Calcularemos el volumen que resulta al hacer rotar el área limitada por
f (x) =√x+ 3
x = 0x = 9y = 0
f (x) =√x+ 3 alrededor de la recta y = 0.
Procedemos como en el teorema.
1. Se dibuja el área que va a rotar, en ella se dibuja un rectángulo perpendicular al eje derotación.
0 9
1
2
3
4
5
( ) 3+= xxf
9=x
x
y ( )( )kk f ξξ ,
kξ kx1−kx
xk∆
x
y
0 9
6 6
2. Se puede apreciar que cuando el rectángulo gira alrededor de la recta y = 0 genera uncilindro de:
Radio = f (ξk)Altura = ∆kx
306 CAPÍTULO 10. CÁLCULO DE VOLÚMENES
3. El volumen del cilindro es entonces:
V = π
∫ 9
0
(√x+ 3)
2dx
= π
∫ 9
0
(x+ 6√x+ 9) dx
= 4592π
Observación. Cuando el eje de rotación no es parte de la frontera del área plana arotar, se hace diferencia de volúmenes.
Ejemplo 10.2 Calcularemos el volumen que resulta de hacer rotar el volumen limitado por
y = cos xy = 1/2x = −π/3x = π/3
alrededor de la recta y = 0.
Procedemos del siguiente modo:
1. Observemos que el volumen generado al rotar el área dada tiene un hueco cilíndrico deradio cos (π/3) = 1
2. Calcularemos el volumen V1 sin el hueco y luego calcularemos el
volumen V2 del hueco. El volumen buscado será V = V1 − V2.
03π
3π−
1
x
y
3π
3π− x
y
kξ1−kx
xk∆
kx
( )( )kk f ξξ , ( ) ( )xxf cos=
2=y
2. El volumen V1 se obtiene rotando el área encerrada por:
y = cosxy = 0x = −π
3
x = π3
luego:
V1 = π
∫ π/3
−π/3(cosx)2 dx = 2π
∫ π/3
0
cos2 x dx
10.2. MÉTODO DE LOS CILINDROS HUECOS 307
3. El hueco cilíndrico tiene volumen
V2 = 2π
∫ π/3
0
(1
2
)2dx
4. Por lo tantoV = V1 − V2= 2π
∫ π/3
0
(cos2 x− (1/2)2
)dx
= 2π(12cosx sin x+ 1
4x∣∣π/30
)
= 2π(18
√3 + 1
12π)
10.2 Método de los cilindros huecos
En el método anterior se aproxima al volumen con cilindros sólidos. El método que estudia-remos en ésta sección utiliza aproximaciones usando cilindros huecos (anillos). El siguienteteorema nos dá una fórmula y una técnica para calcular ciertos volúmenes.
Teorema 10.2 Considérese un área finita del primer cuadrante limitada por: las gráficas dey = f (x) , y = 0, x = a, x = b.
x
y ( )xfy =
cx =rotación de Eje
c a b
Supóngase que dicha área rota al rededor de la recta x = c, (c < a) generando un generandoun sólido de volumen V. Entonces
V = 2π
∫ b
a
(x− c) f (x) dx.
Este método se conoce también como método del anillo.
308 CAPÍTULO 10. CÁLCULO DE VOLÚMENES
Demostración. Detalles de la demostración se observan en los siguientes gráficos.
x
y
x
y
1−kx kx1−kx kx
kξ
( )( )kk f ξξ ,( )xfy =
rota que Rectángulocx =rotación de Eje
c
rotación
por obtenido Cilindro
a b c
Consideremos la partición del intervalo [a, b]
P = {a = x0, x1, . . . , xn = b}
Consideremos el rectángulo de base ∆kx = xk − xk−1 y altura f (ξk) , dondeξk ∈ [xk−1, xk] , este rectángulo al rotar alrededor del eje x = c genera un cilindrohueco de :
radio menor = xk−1 − cradio mayor = xk − caltura = f (ξk) ,
el volumen ∆kV de este rectángulo es
∆kV = π((xk − c)2 − (xk−1 − c)2
)f (ξk) . (i)
Consideremos ahora la función g (x) = (x− c)2 definida en [xk−1, xk] , claramenteg es contínua y diferenciable en [xk−1, xk] . Por el teorema del valor medio, existeξ′k ∈ [xk−1, xk] tal que
g (xk)− g (xk−1) =dg (ξ′k)
dx(xk − xk−1) (ii)
Puesto quedg (x)
dx= 2 (x− c) y ∆kx = xk − xk−1, la igualdad (ii) se convierte en
(xk − c)2 − (xk−1 − c)2 = 2 (ξ′k − c)∆kx. (iii)
Reemplazando (iii) en (i) obtenemos
∆kV = 2π (ξ′k − c) f (ξk)∆kx (iv)
10.2. MÉTODO DE LOS CILINDROS HUECOS 309
La suma de los n anillos correspondientes a la partición P es una aproximación alvolumen buscado. Sea V el volumen exacto, entonces:
V ≈ 2πn∑
k=1
(ξ′k − c) f (ξk)∆kx. (v)
Finalmente haciendo ‖P‖ → 0, y usando el teorema de Bliss (ver capítulo 6)tenemos
V = lim‖P‖→0
2πn∑
k=1
(ξ′k − c) f (ξk)∆kx = 2π
∫ b
a
(x− c) f (x) dx.
�
Observación.El número x− c es la distancia del punto (x, y) de la curva al eje de giro, como debe ser
positivo, a veces este x− c se reemplaza con c− x.
Ejemplo 10.3 Se calculará el volumen del toro generado por rotación, alrededor del ejex = 3, de la región limitada por la circunferencia dada por x2 + y2 = 4
Procedemos como en el teorema.
1. Se dibuja el área a rotar y en ella se dibuja un rectángulo que genera un anillo.
2
( )kk f ξξ ,
3
y
xkx1−kx
kξ
3 giro de Eje =x
2. La distancia del punto (x, y) al eje de giro es
3− x,
por otra parte la altura del cilindro hueco que se genera con el rectángulo representativoes 2y.
310 CAPÍTULO 10. CÁLCULO DE VOLÚMENES
3. Por tanto el volumen es
V = 2π
∫ 2
−2(3− x) (2y) dx
= 4π
∫ 2
−2(3− x)
√4− x2 dx
= 4π{32x√4− x2 + 6 arcsin 1
2x+ 1
3
(√4− x2
)3}2
−2
= 4π (6π) = 24π2
4. El volumen es por tanto V = 24π2 unidades de volumen.
Ejercicios resueltosEn los siguientes ejercicios hallar el volumen generado por rotación de un área plana alrededordel eje indicado.
Cilindros sólidos
Ejercicio 10.1 Calcular el volumen determinado por rotación del área encerrada por f (x) =x+ 4 y g (x) = 6x− x2 alrededor del eje X.Solución.
0 1 2 3 4
1
3
5
7
9
x
y
826 xxy −=
4+= xy
0 1 2 3 4
1
3
5
7
9y
x
Las dos curvas se intersectan en x = 1 y x = 4 (ver gráfico), el volumen generado por el áreaencerrada por las curvas se puede calcular como la diferencia de los siguientes volúmenes:
• El volumen V1 generado por rotación del área encerrado por
Curva dada por grectas: x = 1, x = 4, y = 0,
este volumen es V1 = π
∫ 4
1
(g (x))2 dx = π
∫ 4
1
(6x− x2)2 dx.
10.2. MÉTODO DE LOS CILINDROS HUECOS 311
• El volumen V2 generado por rotación del área encerrado por
Curva dada por frectas: x = 1, x = 4, y = 0,
este volumen es V2 = π
∫ 4
1
(f (x))2 dx = π
∫ 4
1
(x+ 4)2 dx
Así el volumen es V = V1 − V2, esto es,
V = π
∫ 4
1
((6x− x2)2 − (x+ 4)2
)dx
= π 3335.
Ejercicio 10.2 Calcular el volumen generado por rotación del área encerrada por f (x) =12(x− 2) , las rectas x = 0 y y = 0 alrededor del eje x.
Solución. EL volumen en este caso es (ver figura)
V = π∫ 20(f (x))2 dx = π
∫ 20
(12(x− 2)
)2dx
= 23π
x
y
x
y
200 2
1−
Ejercicio 10.3 Calcular el volumen que generado por rotación del área encerrada por f (x) =2x, g (x) = 1
x, x = 1 y x = 4 alrededor del eje X.
Solución. El área a rotar se muestra en la siguiente gráfica.
1 2 3 40
1
2
xy
1=
xy
2=
1 2 3 40
1
2
x
y y
x
312 CAPÍTULO 10. CÁLCULO DE VOLÚMENES
El volumen es:
V = π
∫ 4
1
((f (x))2 − (g (x))2
)dx = π
∫ 4
1
((2x
)2 −(1x
)2)dx
= 94π.
Ejercicio 10.4 Hallar el volumen del sólido de revolución formado por rotación del árealimitada por y = 2 + cosx, x = π, x = 10π y el eje x, alrededor del eje x.
Solución. El volumen total es nueve veces el generado por el área encerrada por y = 2+cos x,x = π, x = 2π, es decir:
V = 9π
∫ 2π
π
y2dx
= 9π
∫ 2π
π
(2 + cos x)2 dx
= 812π2.
Cilindros Huecos
Ejercicio 10.5 Calcular el volumen generado por la rotación del área limitada por f (x) =2x− x2, y = 0 alrededor del eje Y .
Solución. Ilustramos el área a rotar en el siguiente gráfico.
�
�0 2
1
La distancia del punto (x, y) de la curva al eje de rotación es x. La altura del cilindro huecoque se genera es y, luego el volumen es
V = 2π∫ 20xy dx = 2π
∫ 20x (2x− x2) dx
= 83π.
Ejercicio 10.6 Calcular el volumen generado por la rotación del área limitada por f (x) =1 + x+ x7, y = 0, x = 0, x = 1 alrededor del eje y.
10.2. MÉTODO DE LOS CILINDROS HUECOS 313
Solución. El área a rotar se muestra en la siguiente gráfica.
�
�10
1
3f(x) = 1 + x+ x7
������
La distancia de un punto (x, y) al eje de rotación es x y la altura del cilindro es y, luego elvolumen es
V = 2π
∫ 1
0
xy dx = 2π
∫ 1
0
x (1 + x+ x7) dx
= 179π.
Ejercicio 10.7 Hallar el volumen del sólido de revolución formado poe rotación del árealimitada por y = 2 + cosx, x = π, x = 10π y el eje X, alrededor del eje X.
Solución. La distancia al eje de rotación de un punto (x, y) de la curva es siempre x y laaltura del cilindro hueco es y, por tanto el volumen es:
V = 2π∫ 10ππ
xydx
= 2π∫ 10ππ
x (2 + cosx) dx= 2π (99π2 + 2)
Ejercicios propuestosEn los siguientes ejercicios calcular el volumen generado por rotación del área que indica.
1. f (x) = 12(ex + e−x) , y = 0, x = 0, x = 2 alrededor del eje X
Sol.: 18π (e8 − 1 + 8e4) e−4.
2. f (x) = 12(ex + e−x) , y = 0, x = 0, x = 2 alrededor del eje Y
Sol.: (e2 − 3e−2 + 2) π
3. f (x) = x3 + 3x2 y g (x) = 10x en el primer cuadrante, alrededor del eje X.
Sol.: 13312105
π.
4. f (x) = x2 − 4, g (x) = 2x+ 4, alrededor de la recta y = −6.Sol.: π 3024
5.
5. x2 − y2 = 16, y = 0, x = 8, eje Y.Sol.: 128
√3π.
314 CAPÍTULO 10. CÁLCULO DE VOLÚMENES
6. x2 − y2 = 16, y = 0, x = 8, eje X.Sol.: 256π/3.
7. x = 9− y2, entre x− y − 7 = 0, x = 0, alrededor del eje Y.Sol.: 963π/5.
8. y = e−x2
, y = 0, x = 0, x = 1, alrededor del eje Y.
Sol.:π (1− e−1) .
Capítulo 11
Apéndice 1
11.1 El axioma del supremo
Los nueve axiomas estudiados en el capítulo 1 dan lugar a todas las propiedades de losnúmeros. Existe un otro axioma que es de fundamental importancia en el análisis. Esteaxioma es el que distingue el sistema de números reales con el sistema de números racionales(el sistema de números racionales satisface todos los axiomas del sistema de números realesexepto el axioma del supremo). Sin este axioma no podría mostrarse, por ejemplo, la existenciade números como
√2.
Antes de discutir el axioma del supremo es necesario introducir algunos conceptos.
Máximo y mínimoSea S un conjunto finito de números reales, entonces en S existen números m y M tales
que m ≤ x ≤ M para todo x ∈ S. m se conoce como el mínimo de S y M el máximo de S.Esta afirmación es un teorema cuya demostración puede verse en ”Curso de Análisis, ElonLages Lima, IMPA, Brasil, 1976”.
Si S es un conjunto infinito de números reales puede que no tenga máximo y tampocotenga mínimo, esto es, no existen números m,M ∈ S tales que m ≤ x ≤M para todo x ∈ S.Por ejemplo si a, b son números reales tales que a < b el conjunto S = {x ∈ R : a < x < b} notiene máximo ni mínimo.
Cota superior
Definición 11.1 Un conjunto de números reales S está acotado superiormente (o tiene cotasuperior) si existe un número c tal que para todo x ∈ S se verifica x ≤ c Tal número se llamaCota superior de S.
Ejemplo 11.1 Sea S = {x ∈ R : a < x < b} , una cota superior es c = b. Cualquier númeromayor a b también es una cota superior de S.
315
316 CAPÍTULO 11. APÉNDICE 1
Cota inferior
Definición 11.2 Un conjunto de números reales S está acotado inferiormente (o tiene cotainferior) si existe un número c tal que para todo x ∈ S se verifica x ≥ c. Tal número se llamaCota inferior de S.
Ejemplo 11.2 Sea S = {x ∈ R : a < x < b} , una cota inferior es c = a. Cualquier númeromenor que a es también una cota inferior de S.
Teorema 11.3 Si una cota superior de S está en S, tal cota es el máximo de S, Similarmentesi una cota inferior está en S, tal cota es el mínimo de S.
Mínima cota superior
Definición 11.4 Un número c es llamado mínima cota superior de un conjunto no vacio Ssi
i) c es una cota superior de Sii) Ningún número menor a c es una cota superior de S.
El siguiente teorema es muy útil cuando se tiene que probar que un número c es unamínima cota superior.
Teorema 11.5 Un número c es la mínima cota superior de un conjunto vacio S si y solo si
i′) c es una cota superior de Sii′) Para cualquier ε > 0, existe s0 ∈ S tal que s0 > c− ε
En lo que sigue la mínima cota superior de un conjunto S se abreviará con mcs(S) y a vecesse dirá simplemente supremo lo que escribiremos sup(S). Si c es el supremo de S escribiremosc = sup(S).
Axioma 10 (el axioma del supremo)Cada conjunto no vacio S de números reales acotado superiormente posee un
supremo, esto es, existe un número c tal que c = sup(S).
Máxima cota inferior
Definición 11.6 Un número c es llamado máxima cota inferior de un conjunto no vacio S si
i) c es una cota inferior de Sii) Níngún número mayor a c es una cota inferior de S.
Al igual que en el caso del supremo se tiene el siguiente teorema.
Teorema 11.7 Un número c es llamado máxima cota inferior de un conjunto no vacio S siy solamente si
i′) c es una cota inferior de Sii′) Para cualquier ε > 0, existe s0 ∈ S tal que s0 < c+ ε
11.1. EL AXIOMA DEL SUPREMO 317
La máxima cota inferior se abreviará con mcm y se llamará ínfimo. Si c es el ínfimo deun conjunto S escribiremos c = inf(S).
Usando el axioma del supremo se puede probar el siguiente teorema.
Teorema 11.8 Cada conjunto de números reales acotado inferiormente posee un ínfimo.
Ejemplo 11.3 El conjunto S = {x ∈ R : 1 ≤ x ≤ 2} está acotado inferior y superiormenteinf (S) = 1, sup (S) = 2.
Ejemplo 11.4 Determinaremos (si existen) el ínfimo y el supremo del siguiente conjunto.
S =
{1
n: n es un entero positivo
}
Escribiendo S por extensión se tiene:
S =
{1
1,1
2,1
4, · · ·},
de esta descripción podemos ”deducír” que inf(S) = 0 y sup(S) = 1.Demostraremos que estas afirmaciones son ciertas.Mostraremos inicialmente que 0 es el ínfimo de S.
• i′) Es claro que 0 < 1npara todo entero n positivo.
• ii′) Para cualquier ε > 0, existe n tal que 1n< ε, en efecto basta tomar n > 1
ε, as
Teorema 11.9 El conjunto P de los enteros positivos 1, 2, 3, . . . , no es acotado porarriba.
Demostración. Supongamos que P es acotado por arriba. Sabemos que P �= ∅ luegopor el axioma del supremo P tiene supremo, sea b = sup(P), luego para todo ε > 0,existe p ∈ P tal que b − ε < p ≤ b. En particular puesto que 1 > 0, existe p ∈ P talque b − 1 < p ≤ b pero entonces p + 1 > b y puesto que p + 1 ∈ P, b no puede sercota superior, esto contradice a la suposición de que b es una cota superior. De estacontradicción concluimos que P no es acotado por arriba.�
La propiedad arquimediana
Teorema 11.10 Para cada real x existe un entero positivo n tal que n > x.
Demostración. Si para cada entero positivo n se tiene n ≤ x tendríamos que elconjunto de los enteros positivos es acotado, en contradicción con el anterior teorema,luego debe existir un entero n tal que n > x.�
318 CAPÍTULO 11. APÉNDICE 1
Teorema 11.11 Si x > 0 y y es un número arbitrario, existe un entero positivo n talque nx > y.
Demostración. Reemplazando x por y/x en el anterior teorema encontramos queexiste un entero positivo n tal que n > y/x de donde nx > y.�
La propiedad descrita en el anterior teorema es llamada Propiedad Arquimediana de losReales.
Teorema 11.12 Para cualquier real x existe un entero m tal que m− 1 ≤ x < m.
Teorema 11.13 Si a, b son números reales cualesquiera tales que a < b, entonces existeun número racional r tal que a < r < b.
Al iniciar esta sección afirmamos que existe una diferencia entre el sistema de númerosreales y el sistema de números racionales, el siguiente ejemplo muestra esta afirmación.
Ejemplo 11.5 Sea S = {x ∈ R : x2 < 2}, este conjunto es acotado por arriba pero notiene supremo en el sistema de números racionales, sin embargo tiene supremo en elsistema de números reales. Mostraremos que el número c tal que c2 = 2 es el supremode S. La técnica será el siguiente: Mostraremos que las posibilidades c2 < 2 y c2 > 2nos llevan a una contradicción y entonces la única posibilidad es c2 = 2.
— (a) Caso c2 < 2. Puesto que 2 < 4 tenemos c2 < 4, por tanto c < 2. Además paran ≥ 2
0 <2− c2n
<2
n≤ 1
Sea b = c+2− c2n
, n ≥ 2, claramente c < b. Además:
b2 =
(c+
2− c2n
)2
= c2 + 2c
(2− c2n
)+
(2− c2n
)2
= c2 +
(2− c2n
)(2c+
2− c2n
)
< c2 +
(2− c2n
)(4 + 1) , n ≥ 2
= c2 + 5
(2− c2n
)
≤ c2 + 2− c2, n ≥ 5= 2,
11.1. EL AXIOMA DEL SUPREMO 319
luego b2 < 2. Ya que c < b tenemos que existe un racional r tal que c < r < b.Entonces r2 < b2 < 2, luego r2 < 2 por tanto r ∈ S, esto contradice al hecho deque c es el supremo de S (pues hemos encontrado el número r ∈ S con la propiedadr > c, as
— (b) Caso c2 > 2. Este caso también lleva a una contradicción, el lector deberáprobar esta afirmación.
— Como los casos (a) y (b) son imposibles, deducimos que c2 = 2. El número c nopuede ser racional, si c fuera racional se obtiene una contradicción, en efecto, sic =
m
n, en donde se supone que m y n son enteros que no tienen ningun factor en
común, tendremos m2 = 2n2 luego n2 es par y por tanto n es par, asi n se puedeescribir como n = 2L para algún entero L, luegom2 = 4L2, de dondem2 = 2 (2L2),esto es, m2 es par, por tanto m es par, as
Ejercicios propuestos1. Demostrar los teoremas que no presentan demostración.
2. Si tres números reales a, x, y satisfacen las desigualdades a ≤ x ≤ a+y
npara
cada n ≥ 1, entonces x = a.3. Probar que si el producto de dos números es par, entonces uno de ellos es par,
en particular si n2 es par entonces n es par.4. Determinar el supremo y el ínfimo, si existen, de los siguientes conjuntos.
a)
{2− 1
n: n es un entero positivo
},
b)
{(−1)n 1
n: n es un entero positivo
}
c)
{n+ (−1) 1
n: n es un entero positivo
}
5. Pruébese que entre dos reales distintos a, b hay infinitos racionales.6. Si S y T son conjuntos de números reales tales que para cualquier x ∈ S existe
un y ∈ T tal que x ≤ y, demuéstrese que sup(S) ≤ sup(T ).7. Si A,B,C son conjuntos de números reales tales que para cada x ∈ A y caday ∈ B existe z ∈ C tal que x + y ≤ z, demuéstrese que sup(A) + sup(B) ≤sup(C).
320 CAPÍTULO 11. APÉNDICE 1
Capítulo 12
Apéndice 2
12.1 Un límite notable
En este apéndice demostramos el siguiente resultado:
limx→∞
(1 +
1
x
)x= e
Empezamos definiendo el concepto de sucesión.
Definición 12.1 Una sucesión s es una función con dominio el conjunto de losenteros positivos y codominio el conjunto de los reales, esto es, s : Z+ → R. Loselementos de la sucesión se denotan por s (n) o simplemente por sn.
Ejemplo 12.1 La sucesion1
1,1
2,1
3, . . . está generado por la función s definida
por s (n) =1
n.
Definición 12.2 Se dice que L es el límite de una sucesión s si
(∀ε > 0)(∃N ∈ Z+
)(n ≥ N ⇒ |s (n)− L| < ε) ,
en tal caso escribimoslimn→∞
s (n) = L.
Definición 12.3 Una sucesión s es acotada si el conjunto
S ={s (n) : n ∈ Z+
}
es acotado.
Definición 12.4 Usa sucesión s es creciente si para n ≤ m, tenemos s (n) ≤ s (m).
321
322 CAPÍTULO 12. APÉNDICE 2
Teorema 12.5 Sea s una sucesión creciente, supongamos que s está acotada su-periormente. Entonces el límite de la sucesión existe y es igual al supremo delconjunto S = {s (n) : n ∈ Z+}.
Demostración. SeaL = supS,
por tanto, dado ε > 0, existe un entero N tal que
L− ε
2< s (N) ≤ L
puesto que la sucesión es creciente, para n ≥ N tenemos
S (N) ≤ s (n)
es claro además que s (n) ≤ L, luego
L− ε
2< s (N) ≤ s (n) ≤ L
de este resultado tenemos− ε2< s (n)− L ≤ 0
de esto deducimos que |s (n)− L| ≤ ε
2< ε. Esto prueba el teorema.
�
Teorema 12.6 Para cualquier entero positivo n.
2 <
(1 +
1
n
)n< 3
Demostración. Por el teorema del binomio para un natural n podemos escribir:
(1 +
1
n
)n=
n∑
k=0
(nk
)(1n
)k
= 1 + 1 +1
2!
(1− 1
n
)+1
3!
(1− 1
n
)(1− 2
n
)
+ · · ·+ 1
n!
(1− 1
n
)(1− 2
n
)(1− n− 1
n
)
< 1 + 1 +1
2!+1
3!+ · · ·+ 1
n!< 3
(12.1)
esto muestra que efectivamente
2 <
(1 +
1
n
)n< 3.
�
12.1. UN LÍMITE NOTABLE 323
Teorema 12.7 El límite
limn→∞
(1 +
1
n
)n
existe.Demostración. Consideremos la sucesión dada por
s (n) =
(1 +
1
n
)n
luego s es una sucesión creciente de números reales. Por el teorema previo s estáacotado superiormente, luego el límite existe y es igual al supremo, es decir,
limn→∞
(1 +
1
n
)n= sup {s (n) : n ∈ Z}
Denotamos a este límite por e. El valor de esta constante es aproximadamentee = 2.718281828 . . .., tenemos entonces
limn→∞
(1 +
1
n
)n= e
�
Teorema 12.8
limx→∞
(1 +
1
x
)x= e
Demostración. Para todo real x existe un entero n tal que
n ≤ x < n+ 1
por tanto (1 +
1
n
)n≤(1 +
1
x
)x<
(1 +
1
n+ 1
)n+1
es claro que si x→∞ también n→∞, también es claro que