216
Manuale CANopen CMMP CANopen per motorcontroller CMMP Manuale 557 347 it 0708NH [723 760]

Manuale CANopen CMMP
CANopen per motorcontroller CMMP
Manuale 557 347 it 0708NH [723 760]


Festo P.BE.CMMP-CO-SW-IT 0708NH 3
Edizione __________________________________________________________ it 0708NH
Denominazione ___________________________________________ P.BE.CMMP-CO-SW-IT
Codice di ordinazione __________________________________________________ 557 347
(Festo AG & Co. KG, D-73726 Esslingen, 2008)
Internet: http://www.festo.com
Mail: [email protected]
È vietata la riproduzione, distribuzione e diffusione a terzi, nonché l'uso arbitrario, totale o parziale del contenuto della presente documentazione senza la preventiva autorizza- zione scritta della Festo. Qualsiasi infrazione comporta il risarcimento di danni. Tutti i diritti riservati, ivi compreso il diritto di deposito brevetti, modelli registrati o di design.

4 Festo P.BE.CMMP-CO-SW-IT 0708NH
Lista delle revisioni
Autore: Festo AG & Co. KG
Titolo del manuale: CANopen per motorcontroller CMMP
Nome del file:
Luogo di memorizzazione del file:
N. prog. Descrizione Indice di revisione Data della modifica
001 Stesura 0708NH 07.03.2008
Marchio di fabbrica
Microsoft and Windows are either registered trademarks or trademarks of Microsoft Corporation in the United States and/or other countries.

INDICE
Festo P.BE.CMMP-CO-SW-IT 0708NH 5
INDICE
1. Informazioni generali .............................................................................................. 9
1.1 Documentazione ................................................................................................... 9
1.2 CANopen ............................................................................................................. 10
2. Norme di sicurezza per attuatori e comandi elettrici ............................................ 11
2.1 Indicazioni generali ............................................................................................. 11
2.2 Pericoli dovuti ad un impiego errato .................................................................... 13
2.3 Norme di sicurezza .............................................................................................. 14
2.3.1 Norme di sicurezza generali ................................................................. 14
2.3.2 Norme di sicurezza durante montaggio e manutenzione ..................... 16
2.3.3 Protezione contro il contatto di componenti elettrici ........................... 18
2.3.4 Protezione contro le scosse elettriche mediante bassa tensione (PELV) ................................................................................................. 20
2.3.5 Protezione contro movimenti pericolosi ............................................... 20
2.3.6 Protezione contro il contatto di componenti caldi ................................ 21
2.3.7 Protezione durante manipolazione e montaggio ................................. 22
3. Cablaggio e disposizione degli attacchi ............................................................... 23
3.1 Occupazione dei pin ............................................................................................ 23
3.2 Indicazioni per il cablaggio .................................................................................. 23
4. Attivazione di CANopen ......................................................................................... 25
4.1 Panoramica ......................................................................................................... 25
5. Procedura di accesso ............................................................................................ 26
5.1 Introduzione ........................................................................................................ 26
5.2 Accesso agliSDO .................................................................................................. 27
5.2.1 Sequenze SDO per lettura e scrittura ................................................... 28
5.2.2 Messaggi di errore SDO ....................................................................... 29
5.2.3 Simulazione degli accessi SDO tramite RS232 ..................................... 30
5.3 Messaggio PDO ................................................................................................... 31
5.3.1 Descrizione degli oggetti ..................................................................... 32
5.3.2 Oggetti per parametrazione PDO ......................................................... 36
5.3.3 Attivazione dei PDO ............................................................................. 42
5.4 Messaggio SYNC ................................................................................................. 42
5.5 Messaggio EMERGENCY ...................................................................................... 43
5.5.1 Panoramica .......................................................................................... 43
5.5.2 Struttura del messaggio EMERGENCY .................................................. 44
5.5.3 Descrizione degli oggetti ..................................................................... 47

INDICE
6 Festo P.BE.CMMP-CO-SW-IT 0708NH
5.6 Gestione della rete (servizio NMT) ....................................................................... 48
5.7 Bootup ................................................................................................................ 51
5.7.1 Panoramica .......................................................................................... 51
5.7.2 Struttura del messaggio Bootup .......................................................... 51
5.8 Heartbeat (Error Control Protocol) ....................................................................... 51
5.8.1 Panoramica .......................................................................................... 51
5.8.2 Struttura del messaggio Heartbeat ...................................................... 52
5.8.3 Descrizione degli oggetti ..................................................................... 52
5.9 Nodeguarding (Error Control Protocol) ................................................................ 53
5.9.1 Panoramica .......................................................................................... 53
5.9.2 Struttura dei messaggi Nodeguarding ................................................. 53
5.9.3 Descrizione degli oggetti ..................................................................... 54
5.9.4 Oggetto 100Dh: life_time_factor .......................................................... 55
6. Impostare parametri ............................................................................................. 56
6.1 Caricare e memorizzare set di parametri ............................................................. 56
6.1.1 Panoramica .......................................................................................... 56
6.1.2 Descrizione degli oggetti ..................................................................... 58
6.2 Impostazioni di compatibilità .............................................................................. 59
6.2.1 Panoramica .......................................................................................... 59
6.2.2 Descrizione degli oggetti ..................................................................... 59
6.3 Fattori di conversione (Factor Group) .................................................................. 61
6.3.1 Panoramica .......................................................................................... 61
6.3.2 Descrizione degli oggetti ..................................................................... 62
6.4 Parametri del modulo terminale .......................................................................... 71
6.4.1 Panoramica .......................................................................................... 71
6.4.2 Descrizione degli oggetti ..................................................................... 71
6.5 Regolatore di corrente e adattamento del motore ............................................... 79
6.5.1 Panoramica .......................................................................................... 79
6.5.2 Descrizione degli oggetti ..................................................................... 79
6.6 Regolatore di velocità .......................................................................................... 87
6.6.1 Panoramica .......................................................................................... 87
6.6.2 Descrizione degli oggetti ..................................................................... 87
6.7 Regolatore di posizione (Position Control Function) ............................................ 89
6.7.1 Panoramica .......................................................................................... 89
6.7.2 Descrizione degli oggetti ..................................................................... 91
6.8 Limitazione del valore nominale ........................................................................ 101
6.8.1 Descrizione degli oggetti ................................................................... 101
6.9 Adattamenti dell'encoder .................................................................................. 104
6.9.1 Panoramica ........................................................................................ 104
6.9.2 Descrizione degli oggetti ................................................................... 104

INDICE
Festo P.BE.CMMP-CO-SW-IT 0708NH 7
6.10 Emulazione dell'encoder incrementale .............................................................. 109
6.10.1 Panoramica ........................................................................................ 109
6.10.2 Descrizione degli oggetti ................................................................... 109
6.11 Modulazione del valore nominale/effettivo ....................................................... 110
6.11.1 Panoramica ........................................................................................ 110
6.11.2 Descrizione degli oggetti ................................................................... 111
6.12 Ingressi analogici .............................................................................................. 114
6.12.1 Panoramica ........................................................................................ 114
6.12.2 Descrizione degli oggetti ................................................................... 114
6.13 Ingressi e uscite digitali ..................................................................................... 116
6.13.1 Panoramica ........................................................................................ 116
6.13.2 Descrizione degli oggetti ................................................................... 116
6.14 Finecorsa / Interruttori di riferimento ................................................................ 120
6.14.1 Panoramica ........................................................................................ 120
6.14.2 Descrizione degli oggetti ................................................................... 120
6.15 Campionamento di posizioni ............................................................................. 123
6.15.1 Panoramica ........................................................................................ 123
6.15.2 Descrizione degli oggetti ................................................................... 124
6.16 Azionamento del freno ...................................................................................... 127
6.16.1 Panoramica ........................................................................................ 127
6.16.2 Descrizione degli oggetti ................................................................... 127
6.17 Informazioni sulle unità ..................................................................................... 128
6.17.1 Descrizione degli oggetti ................................................................... 128
6.18 Gestione degli errori .......................................................................................... 135
6.18.1 Panoramica ........................................................................................ 135
6.18.2 Descrizione degli oggetti ................................................................... 135
7. Controllo dell'unità (Device Control) .................................................................. 138
7.1 Diagramma di stato (State Machine) ................................................................. 138
7.1.1 Panoramica ........................................................................................ 138
7.1.2 Diagramma di stato del motorcontroller (State Machine) .................. 139
7.1.3 Controlword (parola di comando) ...................................................... 143
7.1.4 Lettura dello stato del motorcontroller .............................................. 147
7.1.5 Statuswords (parole di stato) ............................................................ 148
7.1.6 Descrizione di altri oggetti ................................................................. 155

INDICE
8 Festo P.BE.CMMP-CO-SW-IT 0708NH
8. Modi operativi ..................................................................................................... 158
8.1 Impostazione del modo operativo ..................................................................... 158
8.1.1 Panoramica ........................................................................................ 158
8.1.2 Descrizione degli oggetti ................................................................... 158
8.2 Modo operativo corsa di riferimento (Homing Mode) ........................................ 160
8.2.1 Panoramica ........................................................................................ 160
8.2.2 Descrizione degli oggetti ................................................................... 161
8.2.3 Sequenze della corsa di riferimento ................................................... 166
8.2.4 Controllo della corsa di riferimento .................................................... 171
8.3 Modo operativo posizionamento (Profile Position Mode) .................................. 172
8.3.1 Panoramica ........................................................................................ 172
8.3.2 Descrizione degli oggetti ................................................................... 172
8.3.3 Descrizione del funzionamento .......................................................... 177
8.4 Interpolated Position Mode ............................................................................... 179
8.4.1 Panoramica ........................................................................................ 179
8.4.2 Descrizione degli oggetti ................................................................... 179
8.4.3 Descrizione del funzionamento .......................................................... 186
8.5 Modo operativo regolazione della velocità (Profile Velocity Mode) ................... 188
8.5.1 Panoramica ........................................................................................ 188
8.5.2 Descrizione degli oggetti ................................................................... 190
8.6 Rampe di velocità .............................................................................................. 197
8.7 Modo operativo regolazione della coppia (Profile Torque Mode) ...................... 200
8.7.1 Panoramica ........................................................................................ 200
8.7.2 Descrizione degli oggetti ................................................................... 201
9. Indice analitico ................................................................................................... 206

1. Informazioni generali
Festo P.BE.CMMP-CO-SW-IT 0708NH 9
1. Informazioni generali
1.1 Documentazione
Il presente manuale descrive come il motorcontroller della serie CMMP può essere contemplato in un ambiente di rete CANopen. Vengono descritte l'impostazione dei parametri fisici, l'attivazione del protocollo CANopen, l'integrazione nella rete CAN e la comunicazione con il motorcontroller. È destinato alle persone che hanno già acquisito familiarità con la serie di motorcontroller.
Riporta norme di sicurezza da osservare.
Ulteriori informazioni sono riportate nei seguenti manuali della serie di prodotti CMMP:
- Messa in servizio del ‚motorcontroller CMMP‛: Descrizione della funzionalità delle unità e delle funzioni software del firmware, compresa la comunicazione RS232. Descrizione del software di parametrazione con istruzioni per la prima messa in servizio di un motorcontroller della serie CMMP.
- Descrizione del ‚motorcontroller CMMP‛: Descrizione dei dati tecnici e della funzionalità delle unità nonché indicazioni per l'installazione e l'esercizio del motorcontroller CMMP.
Informazioni sulla versione
La versione hardware indica la data della parte meccanica ed elettronica. La versione firmware indica la data del sistema operativo.
Per l'indicazione della data vedi:
- Versione hardware e firmware nel software di parametrazione con collegamento attivo sotto ‚dati delle unità‛.
Firmware Hardware Software di parametrazione Note
V 1.0

1. Informazioni generali
10 Festo P.BE.CMMP-CO-SW-IT 0708NH
1.2 CANopen
CANopen è uno standard elaborato dall'associazione ‚CAN in Automation‛, nella quale sono organizzati numerosi produttori di apparecchiature. Questo standard ha pressoché
sostituito i protocolli CAN specifici dei produttori finora utilizzati. Così l'utilizzatore finale dispone di un'interfaccia di comunicazione indipendente dai produttori.
Presso questa associazione si possono acquistare, tra l'altro, i manuali qui riportati:
CiA Draft Standard 201 … 207
In queste opere vengono trattate le basi generali e l'incorporazione dello standard CANopen nel modello a strati OSI. I punti essenziali di questo libro vengono presentati nel presente manuale CANopen, così in genere non è necessario acquistare il DS201 … 207.
CiA Draft Standard 301
In questa opera vengono descritti la struttura fondamentale dell'indice oggetti di una unità CANopen e l'accesso a quest'ultima. Inoltre vengono concretizzate le affermazioni del DS201 … 207. Gli elementi dell'indice oggetti richiesti per le serie di motorcontroller CMMP e i relativi metodi di accesso vengono descritti nel presente manuale. L'acquisto del DS301 è opportuno però non assolutamente necessario.
CiA Draft Standard 402
Questo libro tratta l'implementazione concreta di CANopen nei regolatori dell'attuatore.
Si consiglia di acquistare questa opera sebbene tutti gli oggetti implementati vengono documentati e descritti brevemente anche nel presente manuale CANopen.
Indirizzo di riferimento:
CAN in Automation (CiA) International Headquarter Am Weichselgarten 26 D-91058 Erlangen
Tel.: 09131-601091
Fax: 09131-601092
www.can-cia.de
L'implementazione CANopen del motorcontroller si basa sulle seguenti norme:
[1] - ] CiA Draft Standard 301, versione 4.02, 13. febbraio 2002
[2] - ] CiA Draft Standard Proposal 402, versione 2.0, 26. luglio 2002

2. Norme di sicurezza per attuatori e comandi elettrici
Festo P.BE.CMMP-CO-SW-IT 0708NH 11
2. Norme di sicurezza per attuatori e comandi elettrici
2.1 Indicazioni generali
Festo AG & Co. KG non assume alcuna responsabilità per danni imputabili alla non osservanza delle indicazioni di pericolo riportate nelle presenti istruzioni d'uso.
Nota
Prima della messa in servizio leggere le Norme di sicurezza per attuatori e comandi elettrici da pagina 11.
Se la documentazione non viene capita perfettamente in questa lingua, allora si prega di contattare e informare il fornitore.
Il funzionamento perfetto e sicuro del motorcontroller presuppone un trasporto, magazzinaggio, montaggio e installazione appropriati ed eseguiti a regola d'arte nonché manovra e manutenzione accurate.
Nota
Per gli interventi sugli impianti elettrici impiegare solo personale addestrato e qualificato.
Personale addestrato e qualificato
Secondo questo manuale o le indicazioni di pericolo sul prodotto, le persone addette alle operazioni di installazione, montaggio, messa in funzione e funzionamento del motorcontroller sono sufficientemente informate in merito alle avvertenze e misure
precauzionali riportate nelle presenti istruzioni d'uso e dispongono di una qualificazione adeguata alle loro attività.
- Formazione professionale e addestramento o autorizzazione di attivare e disattivare, collegare a massa apparecchiature/sistemi secondo gli standard della tecnica di sicurezza nonché di contrassegnarli opportunamente in funzione delle esigenze di lavoro.
- Formazione professionale o addestramento secondo gli standard della tecnica di sicurezza per quanto riguarda manutenzione e impiego dell'equipaggiamento di sicurezza.
- Addestramento per il primo soccorso.
Per evitare lesioni personali e/o danni materiali, leggere le seguenti avvertenze prima di avviare l'impianto.

2. Norme di sicurezza per attuatori e comandi elettrici
12 Festo P.BE.CMMP-CO-SW-IT 0708NH
Osservare sempre le norme di sicurezza.
Non cercare di installare o avviare il motorcontroller senza prima aver letto attentamente tutte le norme di sicurezza inerenti attuatori e comandi elettrici riportate in questo manuale.
Leggere queste norme di sicurezza e tutte le indicazioni utente prima di operare con il motorcontroller.
Rivolgersi al rappresentante di vendita responsabile se queste indicazioni utente per il motorcontroller non fossero disponibili.
Per garantire un funzionamento sicuro e affidabile del motorcontroller, richiedere la spedizione immediata di questa documentazione al responsabile (responsabili).
Consegnare le presenti norme di sicurezza anche nel caso in cui il motorcontroller venisse venduto, noleggiato e/o consegnato a terzi.
Per motivi di sicurezza e di garanzia non è permesso aprire il motorcontroller.
Una configurazione eseguita a regola d'arte costituisce la condizione per un funzionamento perfetto del motorcontroller!
Avvertenza
PERICOLO !
Un impiego inappropriato del motorcontroller e la non osservanza delle indicazioni di pericolo qui riportate nonché interventi non corretti nel dispositivo di sicurezza possono provocare danni materiali, lesioni personali, scosse elettriche o persino la morte nei casi estremi.

2. Norme di sicurezza per attuatori e comandi elettrici
Festo P.BE.CMMP-CO-SW-IT 0708NH 13
2.2 Pericoli dovuti ad un impiego errato
Avvertenza
PERICOLO !
Elevata tensione elettrica e notevole corrente di lavoro!
Pericolo di morte o gravi lesioni personali dovuti alle scosse elettriche!
Avvertenza
PERICOLO !
Elevata tensione elettrica dovuta al collegamento errato!
Pericolo di morte o lesioni personali dovuti alle scosse elettriche!
Avvertenza
PERICOLO !
Le superfici dei corpi delle apparecchiature possono essere calde!
Pericolo di lesioni! Pericolo di ustioni!
Avvertenza
PERICOLO !
Movimenti pericolosi!
Pericolo di morte, gravi lesioni personali o danni materiali dovuti ai movimenti accidentali dei motori!

2. Norme di sicurezza per attuatori e comandi elettrici
14 Festo P.BE.CMMP-CO-SW-IT 0708NH
2.3 Norme di sicurezza
2.3.1 Norme di sicurezza generali
Avvertenza
Il motorcontroller corrisponde alla classe di sicurezza IP20 e alla classe di inquinamento 1.
Assicurarsi che l'ambiente soddisfi la classe di sicurezza o la classe di inquinamento.
Avvertenza
Utilizzare solo accessori e parti di ricambio approvati dal costruttore.
Avvertenza
Collegare i motorcontroller alla rete secondo le norme EN e prescrizioni VDE (associazione elettrotecnica tedesca) in modo che possano essere staccati con dispositivi di disattivazione appropriati (ad es. interruttore principale, contattore, interruttore di potenza).
Il motorcontroller può essere protetto con un interruttore FI a tensione universale (RCD = Residual Current protective Device) di 300 mA.
Avvertenza
Per la commutazione dei contatti di comando si consiglia di utilizzare contatti dorati o quelli con un'elevata pressione.
A titolo precauzionale bisogna adottare misure di soppressione dei disturbi per gli impianti di commutazione, ad es. contattori e relè con elementi RC o cablare dei diodi.
Osservare le prescrizioni e norme di sicurezza vigenti nel paese in cui viene utilizzata l'apparecchiatura.
2. Norme di sicurezza per attuatori e comandi elettrici
Festo P.BE.CMMP-CO-SW-IT 0708NH 15
Avvertenza
Osservare le condizioni ambientali specificate nella documentazione del prodotto.
Non sono permesse applicazioni critiche per la sicurezza, a meno che non siano state approvate esplicitamente dal produttore.
Le indicazioni per una installazione con compatibilità elettro- magnetica sono riportate nel manuale di prodotto della serie CMMP.
Il costruttore dell'impianto o della macchina è responsabile dell'osservanza dei valori limite richiesti dalle prescrizioni nazionali.
Avvertenza
Le caratteristiche tecniche e condizioni di collegamento/ installazione per il motorcontroller sono riportate in questo manuale di prodotto e devono essere osservate assolutamente.
Avvertenza
PERICOLO !
Osservare le prescrizioni di installazione e norme di sicurezza durante gli interventi sugli impianti ad alta tensione (ad es. DIN, VDE, EN, IEC o altre direttive nazionali e internazionali).
La non osservanza di queste prescrizioni può comportare la morte, lesioni personali o notevoli danni materiali.
Sono valide, tra l'altro, le seguenti norme senza pretesa di completezza:
- VDE 0100 Disposizioni per l'installazione di impianti ad alta
tensione fino a 1000 Volt
- EN 60204 Equipaggiamento elettrico di macchine
- EN 50178 Equipaggiamento di impianti ad alta tensione con apparecchiature elettroniche

2. Norme di sicurezza per attuatori e comandi elettrici
16 Festo P.BE.CMMP-CO-SW-IT 0708NH
2.3.2 Norme di sicurezza durante montaggio e manutenzione
In ogni caso per le operazioni di montaggio e manutenzione dell'impianto sono valide le prescrizioni in materia DIN, VDE, EN e IEC, nonché tutte le norme di sicurezza e
antinfortunistiche statali e locali. Il costruttore dell'impianto o il committente devono garantire l'osservanza di queste direttive.
Avvertenza
Il motorcontroller può essere impiegato, revisionato e/o riparato solo da personale addestrato e qualificato per gli interventi sulle apparecchiature elettriche o per il lavoro con quest'ultime.
Per evitare incidenti, lesioni personali e/o danni materiali:
Avvertenza
Il freno di arresto del motore in dotazione di serie o un freno esterno azionato dal regolatore dell'attuatore non sono adatti per la protezione personale!
Inoltre assicurare gli assi verticali contro la caduta o l'abbassamento dopo lo spegnimento del motore, ad es. mediante:
- bloccaggio meccanico dell'asse verticale, - dispositivo di frenatura/ritenuta/bloccaggio o - compensazione sufficiente del peso dell'asse.
Avvertenza
Il reostato di frenatura esterno o interno è sotto tensione durante l'esercizio e può condurre tensione pericolosa del circuito intermedio fino a circa 5 minuti dopo l'arresto del motorcontroller. Al contatto questa tensione può causare la morte o gravi lesioni personali.
Prima di eseguire le operazioni di manutenzione, assicurarsi che l'alimentazione elettrica sia disinserita e bloccata e che il circuito intermedio sia scaricato.
Diseccitare l'equipaggiamento elettrico agendo sull'interruttore principale e poi bloccarlo per evitare inserimenti accidentali, aspettare che il circuito intermedio sia scaricato per: - gli interventi di manutenzione e riparazione
- le operazioni di pulizia - lunghe interruzioni d'esercizio.

2. Norme di sicurezza per attuatori e comandi elettrici
Festo P.BE.CMMP-CO-SW-IT 0708NH 17
Avvertenza
Procedere accuratamente durante le operazioni di montaggio. Sia al momento del montaggio sia durante il funzionamento successivo dell'attuatore, assicurarsi che nel motorcontroller non cadano trucioli di foratura, polvere metallica o pezzi di montaggio (viti, dadi, ritagli di conduttori).
Inoltre assicurarsi che l'alimentazione di tensione esterna dell'unità di comando (24 V) sia disinserita.
Disattivare l'alimentazione di tensione dell'unità di potenza sempre prima di disinserire l'alimentazione di 24 V dell'unità di comando.
Avvertenza
Eseguire gli interventi in prossimità della macchina solo quando l'alimentazione di corrente alternata o continua è disinserita e bloccata.
Moduli terminali disinseriti o abilitazione del regolatore disattivata non sono bloccaggi appropriati. In caso di guasto può verificarsi una traslazione accidentale dell'attuatore.
Avvertenza
Eseguire la messa in servizio con i motori che girano a vuoto per evitare danni meccanici, ad es. dovuti al senso di rotazione errato.
Avvertenza
In linea di massima le apparecchiature elettroniche non sono a prova di guasto.
L'utilizzatore è tenuto a traslare l'impianto in uno stato sicuro in caso di disfunzione di una apparecchiatura elettrica.
Avvertenza
PERICOLO !
Il motorcontroller e soprattutto il reostato di frenatura esterno o interno possono assumere elevate temperature, che al contatto possono provocare gravi ustioni personali.

2. Norme di sicurezza per attuatori e comandi elettrici
18 Festo P.BE.CMMP-CO-SW-IT 0708NH
2.3.3 Protezione contro il contatto di componenti elettrici
Questa sezione tratta solo apparecchiature e componenti dell'attuatore con tensioni oltre 50 Volt. Al contatto, le parti con tensione superiore a 50 Volt possono costituire un
pericolo per le persone e possono provocare scosse elettriche. Durante il funzionamento delle unità elettriche determinati componenti sono necessariamente sotto tensione pericolosa.
Avvertenza
Tensione che può essere mortale!
Elevata tensione elettrica!
Pericolo di morte e di lesioni per effetto delle scosse elettriche o gravi lesioni personali!
In ogni caso per l'esercizio sono valide le prescrizioni in materia DIN, VDE, EN e IEC, nonché tutte le norme di sicurezza e antinfortunistiche statali e locali. Il costruttore dell'impianto o il committente devono garantire l'osservanza di queste direttive.
Avvertenza
Prima della messa in funzione montare sulle apparecchiature le apposite coperture e i dispositivi di protezione contro il contatto.
Per le unità incorporate garantire la protezione contro il contatto diretto dei componenti elettrici per mezzo di un corpo esterno, ad es. un armadio elettrico.
Osservare le prescrizioni VGB4!
Avvertenza
Collegare il conduttore di protezione dell'equipaggiamento elettrico e delle apparecchiature alla rete di alimentazione sempre in modo fisso.
La corrente di dispersione è maggiore di 3,5 mA dato il filtro di rete incorporato!
Avvertenza
Per il collegamento del conduttore di protezione osservare, secondo la norma EN 60617, la sezione minima in rame prescritta in tutto il suo svolgimento!

2. Norme di sicurezza per attuatori e comandi elettrici
Festo P.BE.CMMP-CO-SW-IT 0708NH 19
Avvertenza
Prima della messa in funzione collegare, anche per eseguire brevi misurazioni e controlli, sempre il conduttore di protezione a tutte le apparecchiature elettriche secondo lo schema o collegarlo con il filo di massa.
Altrimenti sul corpo contenitore possono manifestarsi elevate tensioni che provocano scosse elettriche.
Avvertenza
Non toccare i punti di collegamento elettrici dei componenti quando sono attivati.
Avvertenza
Prima di accedere ai componenti elettrici con tensione superiore a 50, staccare l'apparecchiatura dalla rete o dalla sorgente di tensione.
Bloccare per evitare inserimenti accidentali.
Avvertenza
Al momento dell'installazione tenere presente l'intensità della tensione del circuito intermedio soprattutto riguardo a isolamento e misure di protezione.
Garantire un collegamento a massa e un dimensionamento dei conduttori a regola d'arte nonché apposite misure di protezione contro i cortocircuiti.
Avvertenza
L'apparecchiatura dispone di un circuito a scarica rapida per il circuito intermedio secondo EN 60204 (vedi punto 6.2.4). Tuttavia la scarica rapida può essere inefficace in determinate combinazioni di unità, soprattutto nel collegamento in parallelo di diversi motorcontroller nel circuito intermedio o in un reostato di frenatura non collegato. Poi dopo lo spegnimento i motorcontroller possono essere sotto tensione pericolosa fino a 5 minuti (carica residua del condensatore).

2. Norme di sicurezza per attuatori e comandi elettrici
20 Festo P.BE.CMMP-CO-SW-IT 0708NH
2.3.4 Protezione contro le scosse elettriche mediante bassa tensione (PELV)
Collegamenti e morsetti con tensioni comprese fra 5 e 50 Volt sul motorcontroller sono
voltaggi di protezione che sono realizzati a prova di scariche elettriche secondo le norme qui riportate:
- International: IEC 60364-4-41
- Paesi europei della UE: EN 50178/1998, punto 5.2.8.1
Avvertenza
PERICOLO !
Elevata tensione elettrica dovuta al collegamento errato!
Pericolo di morte o di lesioni dovuto alle scosse elettriche!
Su attacchi e morsetti con tensioni 0 … 50 Volt collegare solo apparecchiature, componenti elettrici e conduttori dotati di basso voltaggio di protezione (PELV = Protective Extra Low Voltage).
Collegare solo tensioni e circuiti elettrici provvisti di disinserzione sicura dai voltaggi pericolosi.
Una disinserzione sicura può essere realizzata utilizzando ad esempio trasformatori di separazione, fotoaccoppiatori affidabili o funzionamento a batteria senza rete.
2.3.5 Protezione contro movimenti pericolosi
I movimenti pericolosi possono essere provocati dall'azionamento errato dei motori collegati. Le cause possono essere molteplici:
- cablaggio sporco o errato
- errori durante l'impiego dei componenti
- errori nei trasduttori di misura e generatori di segnali
- componeti difettosi o non con compatibilità elettromagnetica
- errori nel software del sistema di controllo host.
Questi errori possono verificarsi immediatamente dopo l'avviamento o dopo un indeterminato periodo di tempo durante l'esercizio.
I sistemi di monitoraggio presenti nei componenti escludono ampiamente una funzione
errata negli attuatori collegati. Tuttavia non bisogna confidare unicamente in questi fatti riguardo alla protezione delle persone, soprattutto il pericolo di lesioni e/o danni materiali. Fino al momento in cui i sistemi di monitoraggio incorporati non vengono attivati non si possono escludere in ogni caso movimenti errati dell'attuatore, la cui entità dipende dal tipo di comando e dalle condizioni d'esercizio.

2. Norme di sicurezza per attuatori e comandi elettrici
Festo P.BE.CMMP-CO-SW-IT 0708NH 21
Avvertenza
PERICOLO !
Movimenti pericolosi!
Pericolo di morte, pericolo di lesioni, gravi lesioni personali o danni materiali!
Per i motivi summenzionati bisogna garantire la protezione delle persone eseguendo dei controlli o adottando dei provvedimenti che sono prioritari per l'impianto. I quali vengono contemplati dal costruttore in base alle condizioni specifiche dell'impianto sulla scorta di un'analisi dei pericoli ed errori. A questo proposito vengono incluse anche le norme di sicurezza valide per l'impianto. La macchina può eseguire movimenti accidentali o possono verificarsi altre funzioni errate disinserendo, bypassando o non attivando i dispositivi di sicurezza.
2.3.6 Protezione contro il contatto di componenti caldi
Avvertenza
PERICOLO !
Le superfici dei corpi delle apparecchiature possono essere calde!
Pericolo di lesioni! Pericolo di ustioni!
Avvertenza
Pericolo di ustioni!
Non toccare la superficie del corpo contenitore in prossimità delle sorgenti termiche calde!
Prima di intervenire, lasciar raffreddare le apparecchiature disattivate per 10 minuti.
Pericolo di ustioni se si toccano i componenti caldi dell'equipaggia- mento (ad es. il corpo contenitore) in cui sono presenti termodispersori e resistenze.

2. Norme di sicurezza per attuatori e comandi elettrici
22 Festo P.BE.CMMP-CO-SW-IT 0708NH
2.3.7 Protezione durante manipolazione e montaggio
La manipolazione e il montaggio di determinati pezzi e componenti in un modo non appropriato può causare delle lesioni in condizioni sfavorevoli.
Avvertenza
PERICOLO !
Pericolo di lesioni dovuto ad un impiego non corretto!
Lesioni personali in seguito a schiacciamento, tagli e urti!
A questo proposito sono valide le norme di sicurezza generali:
Avvertenza
Osservare le prescrizioni d'installazione e norme di sicurezza generali relative a impiego e montaggio.
Utilizzare dispositivi di montaggio e trasporto adatti. Prevenire il pericolo di schiacciamenti e contusioni adottando
misure appropriate. Utilizzare solo attrezzi adatti. Impiegare attrezzi speciali se
prescritto.
Impiegare dispositivi di sollevamento e attrezzi a regola d'arte. Se necessario utilizzare un equipaggiamento di protezione
adeguato (ad es. occhiali, scarpe di sicurezza e guanti). Non sostare sotto i carichi pendenti. Per evitare il pericolo di scivolamento, eliminare immediata-
mente i liquidi fuoriusciti sul pavimento.

3. Cablaggio e disposizione degli attacchi
Festo P.BE.CMMP-CO-SW-IT 0708NH 23
3. Cablaggio e disposizione degli attacchi
3.1 Occupazione dei pin
L'interfaccia CAN è già incorporata nel motorcontroller nella serie di apparecchiature CMMP e quindi sempre disponibile.
La connessione CAN-Bus è stata realizzata a norma come connettore D-SUB a 9 poli (sul lato del controller).
Fig. 3.1: Connettore CAN per CMMP
Attenzione
Cablaggio CAN-Bus
Per cablare il motorcontroller tramite il CAN-Bus, osservare assolutamente le informazioni e indicazioni qui riportate per poter realizzare un sistema stabile e senza inconvenienti. Se il cablaggio non è stato eseguito correttamente, allora sul CAN-Bus possono verificarsi delle anomalie durante l'esercizio che disattivano con un errore il motorcontroller per motivi di sicurezza.
Resistenza terminale 120
Nelle unità della serie CMMP non è incorporata alcuna resistenza terminale.
3.2 Indicazioni per il cablaggio
Il CAN-Bus offre una possibilità semplice e affidabile per intercollegare in rete tutti i componenti di un impianto. Tuttavia a condizione che vengano osservate tutte le istruzioni di cablaggio qui riportate.
Fig. 3.2: Esempio di cablaggio

3. Cablaggio e disposizione degli attacchi
24 Festo P.BE.CMMP-CO-SW-IT 0708NH
- Connettere insieme a forma di linea i singoli nodi della rete in modo da collegare a doppino il cavo CAN da controller a controller (vedi Fig. 3.2).
- Su ogni estremità del cavo CAN deve essere presente una resistenza terminale esattamente di 120 ±5 %. In genere nelle schede CAN o in un PLC è già incorporata
una simile resistenza terminale, che deve essere contemplata in maniera adeguata.
- Per il cablaggio utilizzare un cavo schermato esattamente con due coppie di conduttori intrecciati.
Utilizzare una coppia di conduttori intrecciati per il collegamento di CAN-H e CAN-L. Per CAN-GND utilizzare insieme i conduttori dell'altra coppia.
Il cavo viene schermato in tutti i nodi sui collegamenti CAN-Shield.
Alla fine di questo capitolo è riportata una tabella con le caratteristiche dei cavi utilizzati.
- Si sconsiglia di utilizzare connettori intermedi per il cablaggio CAN-Bus. Tuttavia se questi fossero necessari, allora utilizzare corpi contenitori in metallo per collegare la schermatura del cavo.
- Per mantenere il più possibile minimo il collegamento delle interferenze, non installare i cavi del motore parallelamente ai conduttori di segnale. Installare i cavi osservando le specifiche. Schermare e collegare a massa i cavi in modo appropriato.
- Per ulteriori informazioni relative all'installazione di un cablaggio CAN-Bus esente da
interferenze si rimanda alla Controller Area Network protocol specification, versione 2.0
dell'azienda Robert Bosch GmbH, 1991.
- Caratteristiche del cavo CAN-Bus:
2 paia da 2 conduttori intrecciati, d 0,22 mm2
Schermato
Resistenza del doppino < 0,2 /m
Impendenza caratteristica 100 … 120

4. Attivazione di CANopen
Festo P.BE.CMMP-CO-SW-IT 0708NH 25
4. Attivazione di CANopen
4.1 Panoramica
Attivare l'interfaccia CAN con il protocollo CANopen una solo volta tramite l'interfaccia seriale del motorcontroller. Attivare il protocollo CAN tramite la finestra CAN-Bus del software di parametrazione.
Impostare complessivamente 3 parametri diversi.
- Baudrate
Questo parametro determina la baudrate in kBaud utilizzata sul CAN-Bus. Tenere presente che le elevate baudrate richiedono una lunghezza minima del cavo.
- Numero di nodo base
Per ottenere una identificazione univoca nella rete bisogna assegnare un numero di nodo ad ogni utente, il quale può comparire solo una volta. L'apparecchiatura viene indirizzata tramite questo numero.
- Protocollo
Per la comunicazione tramite il CAN-Bus sono disponibili i seguenti profili: - protocollo CANopen secondo DS301 con profilo di applicazione DSP402 o - il profilo di posizionamento Festo FHPP.
Tenere presente che i parametri menzionati possono essere modificati solo se il protocollo è disattivato.
Dopo un reset, tenere presente che la parametrazione della funzionalità CANopen viene conservata solo se il set di parametri del motorcontroller è stato salvato.

5. Procedura di accesso
26 Festo P.BE.CMMP-CO-SW-IT 0708NH
5. Procedura di accesso
5.1 Introduzione
CANopen offre una possibilità semplice e standardizzata di accedere ai parametri del motorcontroller (ad es. alla corrente max. del motore). Perciò ad ogni parametro (oggetto CAN) è assegnato un numero univoco (indice e subindice). La totalità dei parametri impostabili viene definita indice degli oggetti.
In sostanza per l'accesso agli oggetti CAN tramite il CAN-Bus sono disponibili due metodi: Un tipo di accesso confermato in cui il motorcontroller tacita ogni accesso ai parametri (tramite i cosiddetti SDO) e un tipo di accesso non confermato in cui non viene eseguita la tacitazione (tramite i cosiddetti PDO).
Control unit
CMMPAccess form control unit
Acknowledge from motor controller
SDO
Control unit
CMMP
Confirmation from motor controller
PDO (Transmit-PDO)
Control unit
CMMP
Process data from control unit
PDO (Receive- PDO)
Fig. 5.1: Procedura di accesso
In genere il motorcontroller viene parametrato ed anche controllato tramite l'accesso agli SDO. Inoltre per casi d'applicazione speciali sono definiti altri tipi di messaggi (i cosiddetti oggetti di comunicazione), che vengono trasmessi dal motorcontroller o dal controllore host.
SDO Service Data Object Vengono utilizzati per la normale parametrazione del motorcontroller
PDO Process Data Object È possibile lo scambio rapido dei dati di processo (ad es. velocità effettiva)
SYNC Synchronisation Message Sincronizzazione di diversi nodi CAN
EMCY Emergency Message Trasmissione di messaggi di errore
NMT Network Management Servizio di rete: si può ad esempio agire contemporaneamente su tutti i nodi CAN
HEARTBEAT Error Control Protocol Monitoraggio degli utenti di comunicazione mediante messaggi periodici
5. Procedura di accesso
Festo P.BE.CMMP-CO-SW-IT 0708NH 27
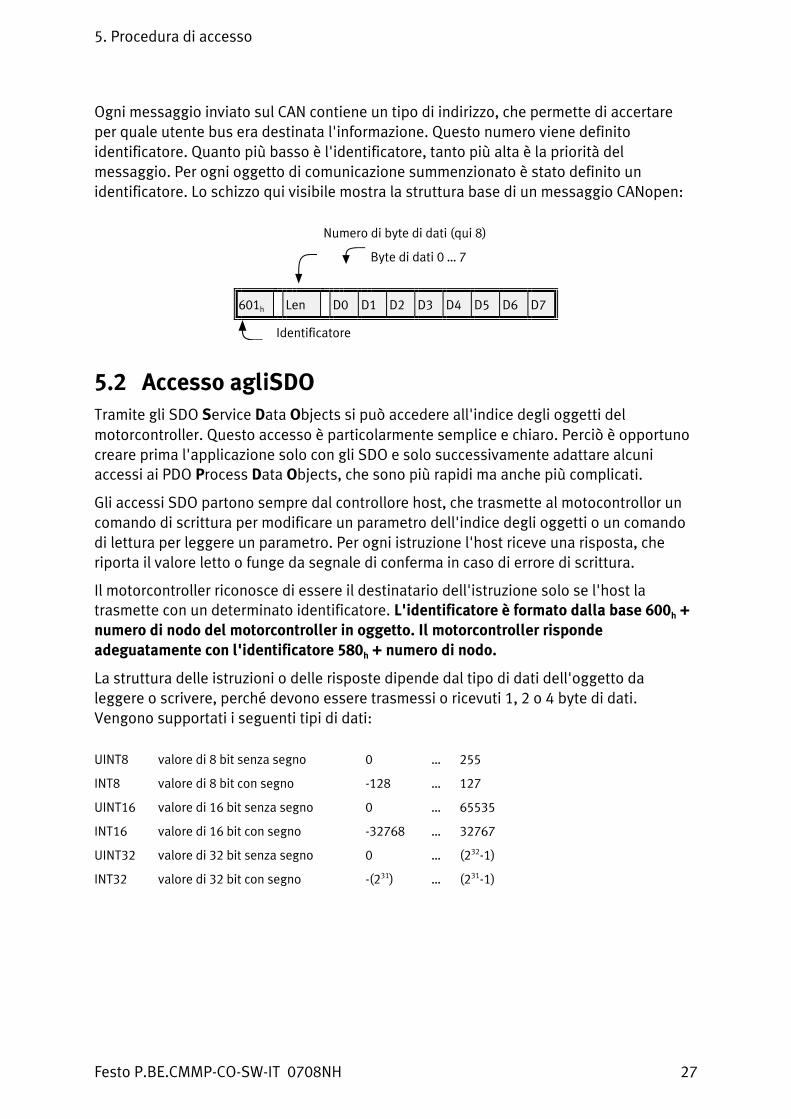
Ogni messaggio inviato sul CAN contiene un tipo di indirizzo, che permette di accertare per quale utente bus era destinata l'informazione. Questo numero viene definito identificatore. Quanto più basso è l'identificatore, tanto più alta è la priorità del
messaggio. Per ogni oggetto di comunicazione summenzionato è stato definito un identificatore. Lo schizzo qui visibile mostra la struttura base di un messaggio CANopen:
Numero di byte di dati (qui 8)
Byte di dati 0 … 7
601h Len D0 D1 D2 D3 D4 D5 D6 D7
Identificatore
5.2 Accesso agliSDO
Tramite gli SDO Service Data Objects si può accedere all'indice degli oggetti del
motorcontroller. Questo accesso è particolarmente semplice e chiaro. Perciò è opportuno creare prima l'applicazione solo con gli SDO e solo successivamente adattare alcuni accessi ai PDO Process Data Objects, che sono più rapidi ma anche più complicati.
Gli accessi SDO partono sempre dal controllore host, che trasmette al motocontrollor un comando di scrittura per modificare un parametro dell'indice degli oggetti o un comando
di lettura per leggere un parametro. Per ogni istruzione l'host riceve una risposta, che riporta il valore letto o funge da segnale di conferma in caso di errore di scrittura.
Il motorcontroller riconosce di essere il destinatario dell'istruzione solo se l'host la trasmette con un determinato identificatore. L'identificatore è formato dalla base 600h +
numero di nodo del motorcontroller in oggetto. Il motorcontroller risponde
adeguatamente con l'identificatore 580h + numero di nodo.
La struttura delle istruzioni o delle risposte dipende dal tipo di dati dell'oggetto da leggere o scrivere, perché devono essere trasmessi o ricevuti 1, 2 o 4 byte di dati. Vengono supportati i seguenti tipi di dati:
UINT8 valore di 8 bit senza segno 0 … 255
INT8 valore di 8 bit con segno -128 … 127
UINT16 valore di 16 bit senza segno 0 … 65535
INT16 valore di 16 bit con segno -32768 … 32767
UINT32 valore di 32 bit senza segno 0 … (232-1)
INT32 valore di 32 bit con segno -(231) … (231-1)

5. Procedura di accesso
28 Festo P.BE.CMMP-CO-SW-IT 0708NH
5.2.1 Sequenze SDO per lettura e scrittura
Per leggere o scrivere oggetti di questi tipi di numeri, utilizzare le sequenze riportate qui appresso. I comandi per scrivere un valore nel motorcontroller iniziano con una
identificazione diversa a seconda del tipo di dati. Invece l'identificazione di risposta è sempre la stessa. Le istruzioni di lettura iniziano sempre con la stessa identificazione e il motorcontroller risponde in modo diverso a seconda del tipo di dati restituiti. I numeri sono in notazione esadecimale.
UINT8 / INT8
Istruzioni di lettura Istruzioni di scrittura
Low Byte dell'indice principale
(esad)
Identificazione per 8 bit
High Byte dell'indice
principale (esad)
Subindice (esad)
Comando 40h IX0 IX1 SU 2Fh IX0 IX1 SU DO
Risposta: 4Fh IX0 IX1 SU D0 60h IX0 IX1 SU
UINT16 / INT16 Identificazione per 8 bit Identificazione per 16 bit
Comando 40h IX0 IX1 SU 2Bh IX0 IX1 SU DO D1
Risposta: 4Bh IX0 IX1 SU D0 D1 60h IX0 IX1 SU
UINT32 / INT32 Identificazione per 16 bit Identificazione per 32 bit
Comando 40h IX0 IX1 SU 23h IX0 IX1 SU DO D1 D2 D3
Risposta: 43h IX0 IX1 SU D0 D1 D2 D3 60h IX0 IX1 SU
Identificazione per 32 bit
ESEMPIO
UINT8 / INT8
Lettura di oggetti 6061_00h
Dati di restituzione: 01h
Scrittura di oggetti 1401_02h
Dati: EFh
Comando 40h 61h 60h 00h 2Fh 01h 14h 02h EFh
Risposta: 4Fh 61h 60h 00h 01h 60h 01h 14h 02h
UINT16 / INT16
Lettura di oggetti 6041_00h
Dati di restituzione: 1234h
Scrittura di oggetti 6040_00h
Dati: 03E8h
Comando 40h 41h 60h 00h 2Bh 40h 60h 00h E8h 03h
Risposta: 4Bh 41h 60h 00h 34h 12h 60h 40h 60h 00h
UINT32 / INT32
Lettura di oggetti 6093_01h
Dati di restituzione:
12345678h
Scrittura di oggetti 6093_01h
Dati: 12345678h
Comando 40h 93h 60h 01h 23h 93h 60h 01h 78h 56h 34h 12h
Risposta: 43h 93h 60h 01h 78h 56h 34h 12h 60h 93h 60h 01h

5. Procedura di accesso
Festo P.BE.CMMP-CO-SW-IT 0708NH 29
Attenzione
In ogni caso bisogna attendere la tacitazione dal parte del motorcontroller!
Si possono trasmettere altre richieste solo se il motorcontroller ha tacitato la richiesta.
5.2.2 Messaggi di errore SDO
In caso di errore durante la lettura o scrittura (ad es. perché il valore scritto è troppo grande), allora il motorcontroller risponde con un messaggio di errore al posto della tacitazione.
Comando … IX0 IX1 SU … … … …
Risposta: 80h IX0 IX1 SU F0 F1 F2 F3
Identificazione
errore
Codice di errore
(4 byte)
Codice di errore F3 F2 F1 F0
Significato
05 03 00 00h Errore di protocollo: il Toggle Bit non è stato modificato
05 04 00 01h Errore di protocollo: client/server command specifier non valido o ignoto
06 06 00 00h Accesso errato a causa di un problema hardware *1)
06 01 00 00h Il tipo di accesso non viene supportato
06 01 00 01h Accesso di lettura a un oggetto che può essere solo scritto
06 01 00 02h Accesso di scrittura a un oggetto che può essere solo letto
06 02 00 00h L'oggetto indirizzato non esiste nell'indice
06 04 00 41h L'oggetto non può essere mappati in un PDO (ad es. oggetto "ro" in RPDO)
06 04 00 42h La lunghezza degli oggetti mappati nel PDO supera la lunghezza PDO
06 04 00 43h Errore di parametro generale
06 04 00 47h Overflow di una grandezza interna/errore generale
06 07 00 10h Errore di protocollo: la lunghezza del parametro di servizio non concorda
06 07 00 12h Errore di protocollo: la lunghezza del parametro di servizio è eccessiva
06 07 00 13h Errore di protocollo: la lunghezza del parametro di servizio è insufficiente
06 09 00 11h Il subindice indirizzato non esiste
06 09 00 30h I dati superano il campo di valori dell'oggetto
06 09 00 31h I dati sono troppo grandi per l'oggetto
06 09 00 32h I dati sono troppo piccoli per l'oggetto
06 09 00 36h Il limite superiore è più piccolo del limite inferiore
08 00 00 20h Non è possibile trasmettere o memorizzare i dati *1)
08 00 00 21h Non è possibile trasmettere o memorizzare i dati perché il regolatore funziona
localmente

5. Procedura di accesso
30 Festo P.BE.CMMP-CO-SW-IT 0708NH
Codice di errore F3 F2 F1 F0
Significato
08 00 00 22h Non è possibile trasmettere o memorizzare i dati perché il regolatore non è nello stato
corretto *3)
08 00 00 23h Non è presente alcun oggetto nell'Object Dictionary *2)
*1) Vengono restituiti secondo DS301 in caso di accesso errato ai store_parameters / restore_parameters.
*2) Questo errore viene ad es. restituito se un altro sistema bus controlla il motorcontroller o l'accesso ai
parametri non è permesso.
*3) ‚Stato‛ deve essere inteso in senso generale: può trattarsi di un modo operativo errato o anche di un
modulo tecnologico non disponibile o un inconveniente simile.
5.2.3 Simulazione degli accessi SDO tramite RS232
Il firmware del motorcontroller permette di simulare gli accessi SDO tramite l'interfaccia RS232. Così nella fase di test gli oggetti possono, dopo la scrittura mediante il CAN-Bus, essere letti e controllati tramite l'interfaccia RS232. Così la creazione dell'applicazione viene facilitata utilizzando il terminale CI del software di parametrazione. La sintassi delle istruzioni è:
Istruzioni di lettura Istruzioni di scrittura
UINT8 / INT8
Indice principale (esad.)
Subindice (esad)
Comando ? XXXX SU = XXXX SU: WW
Risposta: = XXXX SU: WW = XXXX SU: WW
UINT16 / INT16 8 bit di dati (esad)
Comando ? XXXX SU = XXXX SU: WWWW
Risposta: = XXXX SU: WWWW = XXXX SU: WWWW
UINT32 / INT32 16 bit di dati (esad)
Comando ? XXXX SU = XXXX SU: WWWWWWWW
Risposta: = XXXX SU: WWWWWWW = XXXX SU: WWWWWWWW
32 bit di dati (esad)
Tenere presente di immettere le istruzioni come carattere senza alcun spazio.
Errore di lettura Errore di scrittura
Comando ? XXXX SU = XXXX SU: WWWWWWWW1)
Risposta: ! FFFFFFFF ! FFFFFFFF
32 bit codice di errore
F3F2F1F0 secondo cap. 5.2.2
32 bit codice di errore
F3 F2 F1 F0 secondo cap. 5.2.2
1) In caso di errore la risposta è strutturata in modo uguale per tutte e 3 le istruzioni di scrittura
(8, 16, 32 bit).
Immettere le istruzioni come carattere senza alcun spazio.

5. Procedura di accesso
Festo P.BE.CMMP-CO-SW-IT 0708NH 31
Attenzione
Non utilizzare mai queste istruzioni di test nelle applicazioni!
L'accesso tramite l'interfaccia RS232 serve solo per scopi di test e non è adatto per una comunicazione in tempo reale.
Inoltre la sintassi delle istruzioni di test può essere modificata in qualsiasi momento.
5.3 Messaggio PDO
I PDO (Process Data Objects) permettono di trasmettere i dati in funzione dell'evento. Il
PDO trasmette uno o più parametri definiti in precedenza. Diversamente da un SDO, la tacitazione non viene eseguita durante la trasmissione di un PDO. Perciò dopo l'attivazione del PDO, tutti i destinatari devono essere in grado di elaborare in qualsiasi momento i PDO eventualmente in arrivo. In genere ciò comporta un notevole carico di software nel calcolatore host. A questo svantaggio viene contrapposto il vantaggio per il
fatto che il calcolatore host non deve interrogare ciclicamente i parametri trasmessi tramite un PDO, il che determina una notevole riduzione del carico CAN-Bus.
ESEMPIO
Il calcolatore host vorrebbe sapere quando il motorcontroller ha
ultimato il posizionamento da A a B.
Utilizzando gli SDO, il motorcontroller deve interrogare continuamente
l'oggetto statusword, ad es. ogni millisecondo, e così carica
eccessivamente la capacità del bus.
Utilizzando un PDO, il motorcontroller viene parametrato già all'inizio
dell'applicazione in modo da trasmettere, ad ogni modifica dell'oggetto
statusword, un PDO in cui è contenuto l'oggetto statusword.
Così invece di interrogare continuamente, al calcolatore host viene
inviato automaticamente un apposito messaggio non appena si è verificato
l'evento.
Viene fatta una distinzione fra i seguenti tipi di PDO:
Transmit PDO (T PDO) Controller Host Il motorcontroller trasmette il PDO quando si
verifica un determinato evento
Receive PDO (R PDO) Host Controllore Il motorcontroller analizza il PDO quando si verifica un determinato evento
Il motorcontroller dispone di quattro PDO di trasmissione e di quattro PDO di ricezione.
Nei PDO si possono mappare pressoché tutti gli oggetti dell'indice, cioè il PDO contiene – come dati – ad es. il valore effettivo della velocità, il valore effettivo della posizione o simile. Prima, però, bisogna comunicare al motorcontroller quali dati vengono trasmessi perché il PDO contiene solo dati utili e non informazioni relative al tipo di parametro. Nell'esempio qui riportato il valore effettivo della posizione e il valore effettivo della velocità vengono trasmessi rispettivamente nei byte di dati 0 … 3 del PDO e nei byte 4 … 7.

5. Procedura di accesso
32 Festo P.BE.CMMP-CO-SW-IT 0708NH
Numero di byte di dati (qui 8)
Inizio valore effettivo della
velocità (D4 … D7)
181h Len D0 D1 D2 D3 D4 D5 D6 D7
Identi-
ficatore
Inizio valore effettivo della
posizione (D0 … D3)
In questo modo è possibile definire pressoché qualsiasi telegramma di dati. Nei capitoli successivi vengono descritte le impostazioni necessarie.
5.3.1 Descrizione degli oggetti
Identificatore del PDO
COB_ID_used_by_PDO
Nell'oggetto COB_ID_used_by_PDO registrare l'identificatore su
cui deve essere trasmesso o ricevuto il rispettivo PDO. Se il bit 31 è impostato, allora il relativo PDO è disattivato. Si tratta della preimpostazione per tutti i PDO.
La COB-ID può essere modificata solo se il PDO è disattivato, cioè se il bit 31 è impostato. Perciò si può scrivere un identificatore diverso da quello impostato nel regolatore solo se contempo- raneamente è settato il bit 31.
Il bit 30 impostato durante la lettura dell'identificatore indica che non è possibile interrogare l'oggetto tramite un Remoteframe. Questo bit viene ignorato durante la scrittura ed è sempre impostato al momento della lettura.
Numero di oggetti da trasmettere
number_of_mapped_objects
Questo oggetto indica quanti oggetti devono essere mappati nel relativo PDO. Osservare le restrizioni qui elencate:
Si possono mappare massimo 4 oggetti per ogni PDO.
Un PDO deve disporre di massimo 64 bit (8 byte).

5. Procedura di accesso
Festo P.BE.CMMP-CO-SW-IT 0708NH 33
Oggetti da trasmettere
first_mapped_object … fourth_mapped_object
Per ogni oggetto contenuto nel PDO bisogna comunicare al
motorcontroller il relativo indice, il subindice e la lunghezza. L'indicazione della lunghezza deve concordare con quella riportata nell'Object Dictionary. Non è possibile mappare parti di un oggetto.
Le informazioni sulla mappatura presentano il seguente formato:
Indice principale dell'oggetto da mappare (esad)
Subindice dell'oggetto da mappare (esad)
Lunghezza
dell'oggetto xxx_mapped_object Index
(16 bit)
Subindice
(8 bit)
Lunghezza
(8 bit)
Per facilitare l'operazione di mappatura, procedere nel modo seguente:
1. Il numero di oggetti mappati viene impostato su 0.
2. I parametri first_mapped_object … fourth_mapped_object possono essere descritti (in questo momento non è importante la lunghezza totale degli oggetti).
3. Il numero di oggetti mappati viene impostato su un valore fra 1 … 4. Ora la lunghezza di tutti questi oggetti non deve superare 64 bit.
Tipo di trasmissione transmission_type und inhibit_time
Per ogni PDO si può definire quale evento determina l'emissione (Transmit-PDO) o l'analisi (Receive-PDO) di un messaggio.
Valore Significato Permesso per
01h – F0h SYNC-Message
Il valore numerico indica quanti messaggi SYNC
devono essere arrivati prima che il PDO venga
- trasmesso (T-PDO) o
- analizzato (R-PDO)
TPDO
RPDO
FEh Ciclico
Il Transfer-PDO viene aggiornato ciclicamente dal
motorcontroller e trasmesso. Il lasso di tempo
viene stabilito dall'oggetto inhibit_time
Invece i Receive-PDO vengono analizzati
direttamente dopo la ricezione
TPDO
(RPDO)

5. Procedura di accesso
34 Festo P.BE.CMMP-CO-SW-IT 0708NH
Valore Significato Permesso per
FFh Cambiamento
Il Transfer-PDO viene trasmesso se nei dati del
PDO è cambiato minimo 1 bit
Inoltre con inhibit_time si può stabilire l'intervallo
di tempo minimo fra l'invio di due PDO in passi di
100 µs
TPDO
Non è permesso utilizzare tutti gli altri valori.
Mascheramento transmit_mask_high und transmit_mask_low
Selezionando ‚Cambiamento‛ come transmission_type, allora il
TPDO viene sempre trasmesso se cambia minimo 1 bit del TPDO. Tuttavia molto spesso bisogna trasmettere il TPDO solo se determinati bit sono cambiati. Perciò il TPDO può essere dotato di
una maschera: solo i bit del TPDO impostati su ‚1‛ nella maschera vengono applicati per l'analisi, ossia per verificare se il PDO è cambiato. Questa funzione è specifica del costruttore, quindi tutti i bit delle maschere sono impostati come valore default.
5. Procedura di accesso
Festo P.BE.CMMP-CO-SW-IT 0708NH 35
ESEMPIO
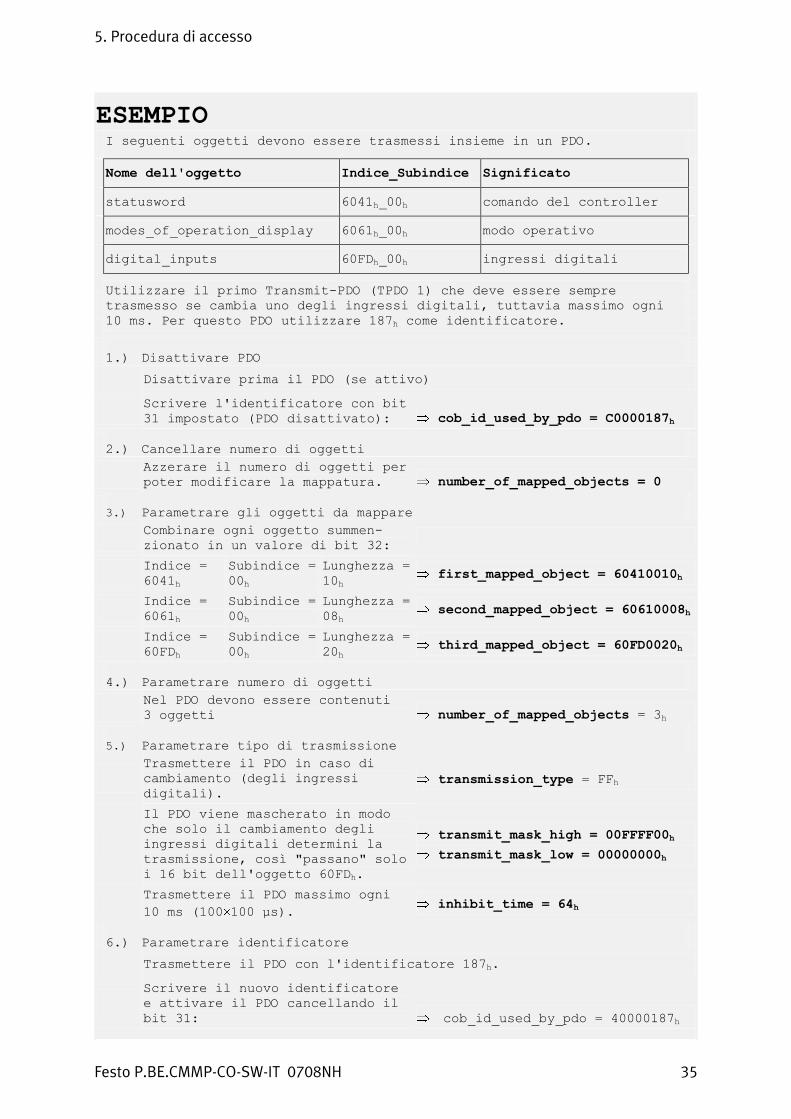
I seguenti oggetti devono essere trasmessi insieme in un PDO.
Nome dell'oggetto Indice_Subindice Significato
statusword 6041h_00h comando del controller
modes_of_operation_display 6061h_00h modo operativo
digital_inputs 60FDh_00h ingressi digitali
Utilizzare il primo Transmit-PDO (TPDO 1) che deve essere sempre
trasmesso se cambia uno degli ingressi digitali, tuttavia massimo ogni
10 ms. Per questo PDO utilizzare 187h come identificatore.
1.) Disattivare PDO
Disattivare prima il PDO (se attivo)
Scrivere l'identificatore con bit
31 impostato (PDO disattivato): cob_id_used_by_pdo = C0000187h
2.) Cancellare numero di oggetti
Azzerare il numero di oggetti per
poter modificare la mappatura. number_of_mapped_objects = 0
3.) Parametrare gli oggetti da mappare
Combinare ogni oggetto summen-
zionato in un valore di bit 32:
Indice =
6041h
Subindice =
00h
Lunghezza =
10h first_mapped_object = 60410010h
Indice =
6061h
Subindice =
00h
Lunghezza =
08h second_mapped_object = 60610008h
Indice =
60FDh
Subindice =
00h
Lunghezza =
20h third_mapped_object = 60FD0020h
4.) Parametrare numero di oggetti
Nel PDO devono essere contenuti
3 oggetti number_of_mapped_objects = 3h
5.) Parametrare tipo di trasmissione
Trasmettere il PDO in caso di
cambiamento (degli ingressi
digitali).
transmission_type = FFh
Il PDO viene mascherato in modo
che solo il cambiamento degli
ingressi digitali determini la
trasmissione, così "passano" solo
i 16 bit dell'oggetto 60FDh.
transmit_mask_high = 00FFFF00h
transmit_mask_low = 00000000h
Trasmettere il PDO massimo ogni
10 ms (100 100 µs). inhibit_time = 64h
6.) Parametrare identificatore
Trasmettere il PDO con l'identificatore 187h.
Scrivere il nuovo identificatore
e attivare il PDO cancellando il
bit 31: cob_id_used_by_pdo = 40000187h

5. Procedura di accesso
36 Festo P.BE.CMMP-CO-SW-IT 0708NH
Tenere presente che la parametrazione dei PDO può essere generalmente modificata solo se lo stato di rete (NMT) non è operazionale. Vedi anche capitolo 0.
5.3.2 Oggetti per parametrazione PDO
Nei motorcontroller della serie CMMP sono disponibili complessivamene 4 Transmit-PDO e 4 Receive-PDO. I singoli oggetti per parametrare questi PDO sono uguali per i 4 TPDO e i 4 RPDO. Perciò qui appresso viene riportata esplicitamente solo la descrizione dei parametri dei primi TPDO. Può essere utilizzata anche per gli altri PDO, che qui di seguito sono elencati sotto forma di tabella.
Index 1800h
Name transmit_pdo_parameter_tpdo1
Object Code RECORD
No. of Elements 3
Sub-Index 01h
Description cob_id_used_by_pdo_tpdo1
Data Type UINT32
Access rw
PDO Mapping no
Units --
Value Range 181h … 1FFh, bit 30 e 31 possono essere impostati
Default Value C0000181h
Sub-Index 02h
Description transmission_type_tpdo1
Data Type UINT8
Access rw
PDO Mapping no
Units --
Value Range 0 … 8Ch, FEh, FFh
Default Value FFh
Sub-Index 03h
Description inhibit_time_tpdo1
Data Type UINT16
Access rw
PDO Mapping no

5. Procedura di accesso
Festo P.BE.CMMP-CO-SW-IT 0708NH 37
Units 100 µs (i.e. 10 = 1ms)
Value Range --
Default Value 0
Index 1A00h
Name transmit_pdo_mapping_tpdo1
Object Code RECORD
No. of Elements 4
Sub-Index 00h
Description number_of_mapped_objects_tpdo1
Data Type UINT8
Access rw
PDO Mapping No
Units --
Value Range 0 … 4
Default Value vedi tabella
Sub-Index 01h
Description first_mapped_object_tpdo1
Data Type UINT32
Access rw
PDO Mapping no
Units --
Value Range --
Default Value vedi tabella
Sub-Index 02h
Description second_mapped_object_tpdo1
Data Type UINT32
Access rw
PDO Mapping no
Units --
Value Range --
Default Value vedi tabella

5. Procedura di accesso
38 Festo P.BE.CMMP-CO-SW-IT 0708NH
Sub-Index 03h
Description third_mapped_object_tpdo1
Data Type UINT32
Access rw
PDO Mapping no
Units --
Value Range --
Default Value vedi tabella
Sub-Index 04h
Description fourth_mapped_object_tpdo1
Data Type UINT32
Access rw
PDO Mapping no
Units --
Value Range --
Default Value vedi tabella
Tenere presente che il gruppo di oggetti transmit_pdo_parameter_xxx e transmit_pdo_mapping_xxx possono essere solo descritti se il PDO è disattivato (bit 31 impostato in cob_id_used_by_pdo_xxx)
1. Transmit-PDO Index Comment Type Acc. Default Value
1800h_00h number of entries UINT8 ro 03 h
1800h_01h COB-ID used by PDO UINT32 rw C0000181h
1800h_02h transmission type UINT8 rw FFh
1800h_03h inhibit time (100 µs) UINT16 rw 0000h
1A00h_00h number of mapped objects UINT8 rw 01h
1A00h_01h first mapped object UINT32 rw 60410010h
1A00h_02h second mapped object UINT32 rw 00000000h
1A00h_03h third mapped object UINT32 rw 00000000h
1A00h_04h fourth mapped object UINT32 rw 00000000h

5. Procedura di accesso
Festo P.BE.CMMP-CO-SW-IT 0708NH 39
2. Transmit-PDO Index Comment Type Acc. Default Value
1801h_00h number of entries UINT8 ro 03 h
1801h_01h COB-ID used by PDO UINT32 rw C0000281h
1801h_02h transmission type UINT8 rw FFh
1801h_03h inhibit time (100 µs) UINT16 rw 0000h
1A01h_00h number of mapped objects UINT8 rw 02h
1A01h_01h first mapped object UINT32 rw 60410010h
1A01h_02h second mapped object UINT32 rw 60610008h
1A01h_03h third mapped object UINT32 rw 00000000h
1A01h_04h fourth mapped object UINT32 rw 00000000h
3. Transmit-PDO Index Comment Type Acc. Default Value
1802h_00h number of entries UINT8 ro 03 h
1802h_01h COB-ID used by PDO UINT32 rw C0000381h
1802h_02h transmission type UINT8 rw FFh
1802h_03h inhibit time (100 µs) UINT16 rw 0000h
1A02h_00h number of mapped objects UINT8 rw 02h
1A02h_01h first mapped object UINT32 rw 60410010h
1A02h_02h second mapped object UINT32 rw 60640020h
1A02h_03h third mapped object UINT32 rw 00000000h
1A02h_04h fourth mapped object UINT32 rw 00000000h
4. Transmit-PDO Index Comment Type Acc. Default Value
1803h_00h number of entries UINT8 ro 03 h
1803h_01h COB-ID used by PDO UINT32 rw C0000481h
1803h_02h transmission type UINT8 rw FFh
1803h_03h inhibit time (100 µs) UINT16 rw 0000h
1A03h_00h number of mapped objects UINT8 rw 02h
1A03h_01h first mapped object UINT32 rw 60410010h
1A03h_02h second mapped object UINT32 rw 606C0020h
1A03h_03h third mapped object UINT32 rw 00000000h
1A03h_04h fourth mapped object UINT32 rw 00000000h

5. Procedura di accesso
40 Festo P.BE.CMMP-CO-SW-IT 0708NH
tpdo_1_transmit_mask
Index Comment Type Acc. Default Value
2014h_00h number of entries UINT8 ro 02 h
2014h_01h tpdo_1_transmit_mask_low UINT32 rw FFFFFFFFh
2014h_02h tpdo_1_transmit_mask_high UINT32 rw FFFFFFFFh
tpdo_2_transmit_mask
Index Comment Type Acc. Default Value
2015h_00h number of entries UINT8 ro 02 h
2015h_01h tpdo_2_transmit_mask_low UINT32 rw FFFFFFFFh
2015h_02h tpdo_2_transmit_mask_high UINT32 rw FFFFFFFFh
tpdo_3_transmit_mask
Index Comment Type Acc. Default Value
2016h_00h number of entries UINT8 ro 02 h
2016h_01h tpdo_3_transmit_mask_low UINT32 rw FFFFFFFFh
2016h_02h tpdo_3_transmit_mask_high UINT32 rw FFFFFFFFh
tpdo_4_transmit_mask
Index Comment Type Acc. Default Value
2017h_00h number of entries UINT8 ro 02 h
2017h_01h tpdo_4_transmit_mask_low UINT32 rw FFFFFFFFh
2017h_02h tpdo_4_transmit_mask_high UINT32 rw FFFFFFFFh
1. Receive-PDO Index Comment Type Acc. Default Value
1400h_00h number of entries UINT8 ro 02 h
1400h_01h COB-ID used by PDO UINT32 rw C0000201h
1400h_02h transmission type UINT8 rw FFh
1600h_00h number of mapped objects UINT8 rw 01h
1600h_01h first mapped object UINT32 rw 60400010h
1600h_02h second mapped object UINT32 rw 00000000h
1600h_03h third mapped object UINT32 rw 00000000h
1600h_04h fourth mapped object UINT32 rw 00000000h

5. Procedura di accesso
Festo P.BE.CMMP-CO-SW-IT 0708NH 41
2. Receive-PDO Index Comment Type Acc. Default Value
1401h_00h number of entries UINT8 ro 02 h
1401h_01h COB-ID used by PDO UINT32 rw C0000301h
1401h_02h transmission type UINT8 rw FFh
1601h_00h number of mapped objects UINT8 rw 02h
1601h_01h first mapped object UINT32 rw 60400010h
1601h_02h second mapped object UINT32 rw 60600008h
1601h_03h third mapped object UINT32 rw 00000000h
1601h_04h fourth mapped object UINT32 rw 00000000h
3. Receive-PDO Index Comment Type Acc. Default Value
1402h_00h number of entries UINT8 ro 02 h
1402h_01h COB-ID used by PDO UINT32 rw C0000401h
1402h_02h transmission type UINT8 rw FFh
1602h_00h number of mapped objects UINT8 rw 02h
1602h_01h first mapped object UINT32 rw 60400010h
1602h_02h second mapped object UINT32 rw 607A0020h
1602h_03h third mapped object UINT32 rw 00000000h
1602h_04h fourth mapped object UINT32 rw 00000000h
4. Receive-PDO Index Comment Type Acc. Default Value
1403h_00h number of entries UINT8 ro 02 h
1403h_01h COB-ID used by PDO UINT32 rw C0000501h
1403h_02h transmission type UINT8 rw FFh
1603h_00h number of mapped objects UINT8 rw 02h
1603h_01h first mapped object UINT32 rw 60400010h
1603h_02h second mapped object UINT32 rw 60FF0020h
1603h_03h third mapped object UINT32 rw 00000000h
1603h_04h fourth mapped object UINT32 rw 00000000h
5. Procedura di accesso
42 Festo P.BE.CMMP-CO-SW-IT 0708NH
5.3.3 Attivazione dei PDO
Il motorcontroller è in grado di trasmettere o ricevere i PDO solo se sono realizzati i punti qui elencati:
- L'oggetto number_of_mapped_objects deve essere non uguale a zero.
- Nell'oggetto cob_id_used_for_pdos deve essere cancellato il bit 31.
- Lo stato di comunicazione del motorcontroller deve essere operazionale
(vedi capitolo 5.6, ‚Gestione della rete: servizio NMT‛).
Deve essere realizzato il punto qui riportato per poter parametrare i PDO:
- Lo stato di comunicazione del motorcontroller non deve essere operazionale.
5.4 Messaggio SYNC
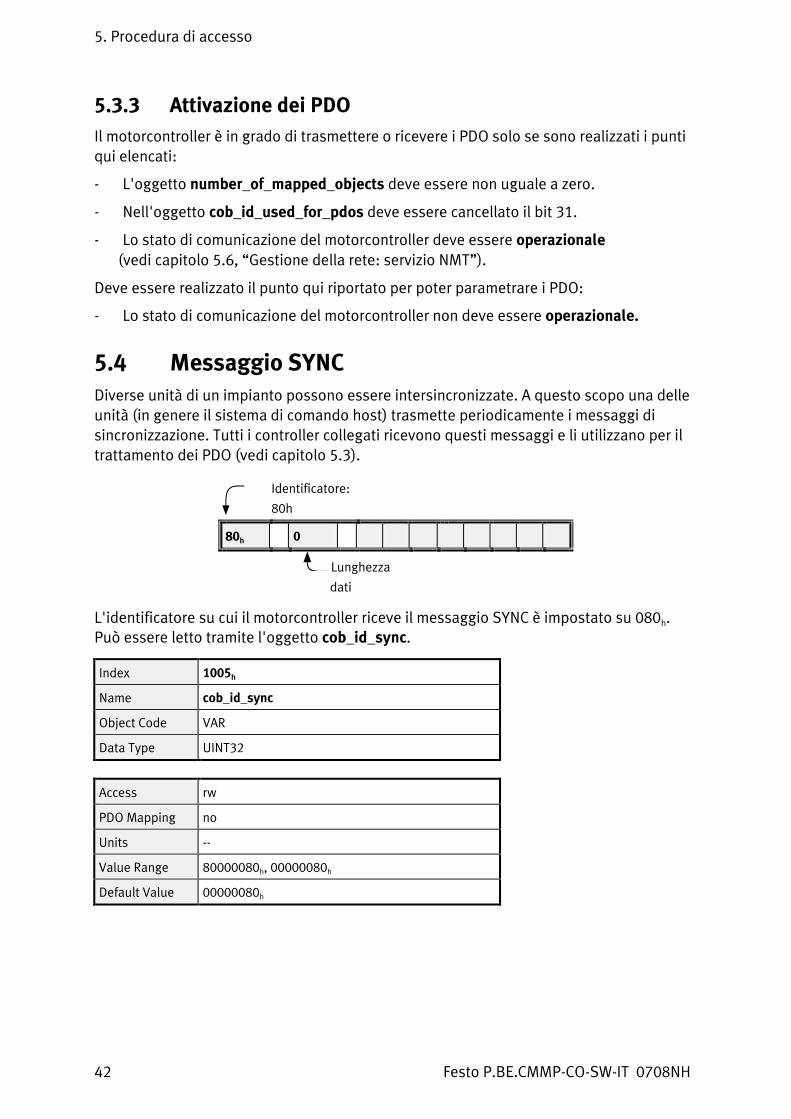
Diverse unità di un impianto possono essere intersincronizzate. A questo scopo una delle unità (in genere il sistema di comando host) trasmette periodicamente i messaggi di sincronizzazione. Tutti i controller collegati ricevono questi messaggi e li utilizzano per il trattamento dei PDO (vedi capitolo 5.3).
Identificatore:
80h
80h 0
Lunghezza
dati
L'identificatore su cui il motorcontroller riceve il messaggio SYNC è impostato su 080h. Può essere letto tramite l'oggetto cob_id_sync.
Index 1005h
Name cob_id_sync
Object Code VAR
Data Type UINT32
Access rw
PDO Mapping no
Units --
Value Range 80000080h, 00000080h
Default Value 00000080h

5. Procedura di accesso
Festo P.BE.CMMP-CO-SW-IT 0708NH 43
5.5 Messaggio EMERGENCY
Il motorcontroller monitora il funzionamento dei moduli più importanti, ossia alimenta- zione di tensione, modulo terminale, analisi del resolver e slot tecnologici. Inoltre
vengono controllati continuamente il motore (temperatura, resolver) e i finecorsa. Anche le parametrazioni errate possono determinare messaggi di errore (divisione per zero ecc.). In caso di errore sul display del motorcontroller appare il relativo numero. In caso di più messaggi di errore contemporaneamente, allora sul display appare sempre l'informazione con la massima priorità (il numero più piccolo).
5.5.1 Panoramica
Il regolatore trasmette di messaggio di EMERGENZA in caso di errore o se l'errore viene tacitato. L'identificatore di questo messaggio è composto dall'identificatore 80h e dal numero di nodo del regolatore in oggetto.
Error free
Error occured
0
4
32
1
Dopo un reset, il regolatore è nello stato ‚Error free‛ (che eventualmente abbandona immediatamente perché sin dall'inizio è presente un errore). Sono possibili le seguenti transizioni di stato:
Nr. Causa Significato
0 Inizializzazione ultimata
1 Errore Non era presente alcun errore ed ora si verifica un errore. Viene
trasmesso un telegramma EMERGENCY con il codice dell'errore che si è
verificato
2 Tacitazione errori Si cerca di tacitare gli errori (vedi capitolo 7.1.5), però non tutte le cause
sono eliminate
3 Errore È già presente un errore e si verifica un secondo errore. Viene trasmesso
un telegramma EMERGENCY con il codice del nuovo errore
4 Tacitazione errori Si cerca di tacitare gli errori e tutte le cause sono eliminate. Viene
trasmesso un telegramma EMERGENCY con il codice di errore 0000
Tab. 5.1: Eventuali transizioni di stato

5. Procedura di accesso
44 Festo P.BE.CMMP-CO-SW-IT 0708NH
5.5.2 Struttura del messaggio EMERGENCY
Al momento dell'errore il motorcontroller trasmette un messaggio di EMERGENZA. L'identificatore di questo messaggio è composto dall'identificatore 81h e dal numero di
nodo del motorcontroller in oggetto.
Il messaggio di EMERGENZA è formato da 8 byte di dati, i primi due byte contengono un error_code, che sono riportati nella tabella seguente. Il terzo byte contiene un altro codice
di errore (oggetto 1001h). I rimanenti 5 byte contengono degli zeri.
Identificatore:
80h + numero
di nodo
error_code
error_register
(obj. 1001h)
81h 8 E0 I1 R0 0 0 0 0 0
Lunghezza
dati
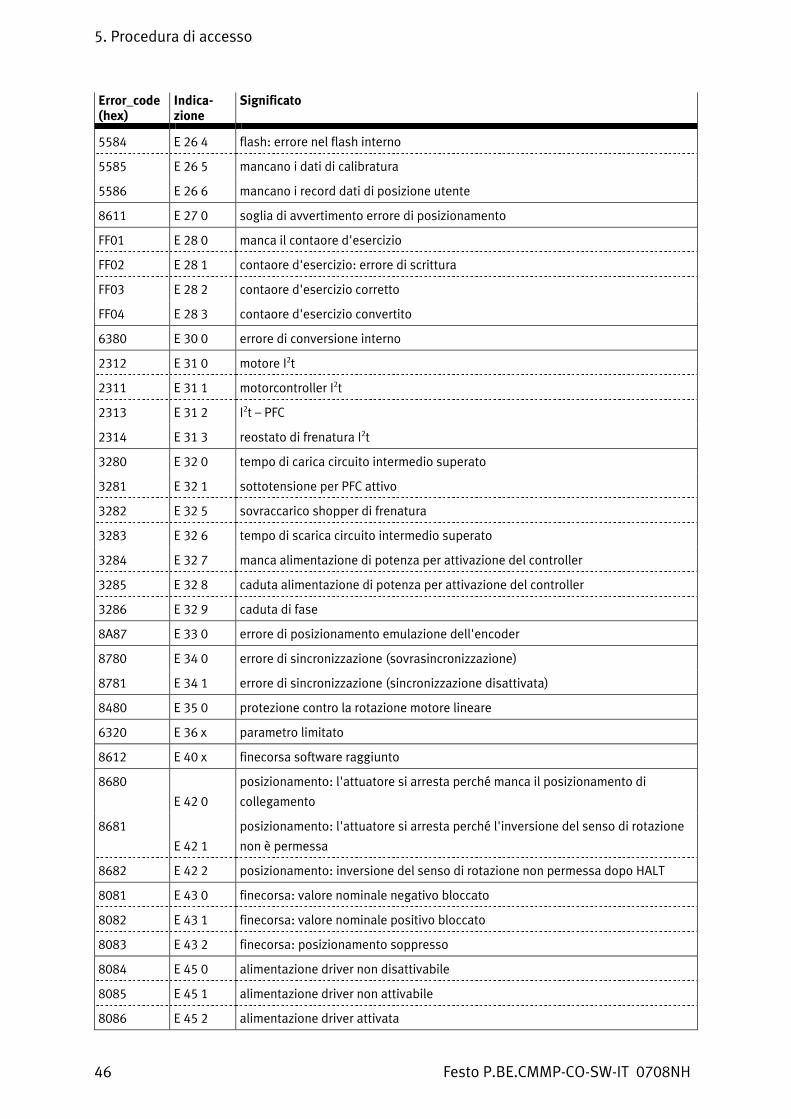
Possono verificarsi i codici di errore qui elencati:
Error_code (hex)
Indica- zione
Significato
0000 -- regolatore senza errori
6180 E 01 0 stack overflow
3220 E 02 0 sottotensione circuito intermedio
4310 E 03 x sovratemperatura motore
4210 E 04 0 sovratemperatura unità di potenza
4280 E 04 1 sovratemperatura circuito intermedio
5114 E 05 0 caduta tensione interna 1
5115 E 05 1 caduta tensione interna 2
5116 E 05 2 caduta alimentazione driver
5410 E 05 3 sottotensione I/O digitali
5410 E 05 4 sovracorrente I/O digitali
2320 E 06 x cortocircuito modulo terminale
3210 E 07 0 sovratensione
7380 E 08 0 errore resolver
7382 E 08 2 errore segnali di traccia Z0 trasduttore incrementale
7383 E 08 3 errore segnali di traccia Z1 trasduttore incrementale
7384 E 08 4 errore segnali di traccia trasduttore incrementale digitale
7385 E 08 5 errore segnali di traccia segnali del trasduttore Hall trasduttore incrementale
7386 E 08 6 errore di comunicazione resolver
7387 E 08 7 ampiezza del segnale traccia incrementale errata
7388 E 08 8 errore interno del resolver

5. Procedura di accesso
Festo P.BE.CMMP-CO-SW-IT 0708NH 45
Error_code (hex)
Indica- zione
Significato
7389 E 08 9 il resolver su X2b non viene supportato
73A1 E 09 0 set di parametri del resolver tipo CMMP
73A2 E 09 1 non è possibile decodificare il set di parametri del resolver
73A3 E 09 2 set di parametri del resolver: versione non nota
73A4 E 09 3 set di parametri del resolver: struttura dei dati difettosa
73A5 E 09 7 EEPROM resolver protetta da scrittura
73A6 E 09 9 EEPROM resolver troppo piccola
8A80 E 11 0 corsa di riferimento: errore allo start
8A81 E 11 1 errore durante corsa di riferimento
8A82 E 11 2 corsa di riferimento: errore impulso dello zero
8A83 E 11 3 corsa di riferimento: time-out
8A84 E 11 4 corsa di riferimento: finecorsa errato / non valido
8A85 E 11 5 corsa di riferimento: I2t / errore di posizionamento
8A86 E 11 6 corsa di riferimento: fine del percorso di ricerca
8180 E 12 0 CAN-Bus: numero di nodo doppio
8120 E 12 1 errore di comunicazione CAN: BUS OFF
8181 E 12 2 errore di comunicazione CAN durante trasmissione
8182 E 12 3 errore di comunicazione CAN durante ricezione
6185 E 15 0 divisione per 0
6186 E 15 1 superamento del campo (overflow/underflow)
6181 E 16 0 errata esecuzione del programma
6182 E 16 1 interrupt illegale
6187 E 16 2 errore di inizializzazione
6183 E 16 3 stato imprevisto
8611 E 17 x superamento valore limite errore di posizionamento
5280 E 21 1 errore 1 misurazione della corrente U
5281 E 21 1 errore 1 misurazione della corrente V
5282 E 21 2 errore 2 misurazione della corrente U
5283 E 21 3 errore 2 misurazione della corrente V
6080 E 25 0 tipo di unità non valida
6081 E 25 1 tipo di unità non supportata
6082 E 25 2 revisione hardware non supportata
6083 E 25 3 funzione limitata dell'unità
5580 E 26 0 manca il set di parametri utente
5581 E 26 1 errore cumulativo di controllo
5582 E 26 2 flash: errore durante scrittura
5583 E 26 3 flash: errore durante cancellazione
5. Procedura di accesso
46 Festo P.BE.CMMP-CO-SW-IT 0708NH
Error_code (hex)
Indica- zione
Significato
5584 E 26 4 flash: errore nel flash interno
5585 E 26 5 mancano i dati di calibratura
5586 E 26 6 mancano i record dati di posizione utente
8611 E 27 0 soglia di avvertimento errore di posizionamento
FF01 E 28 0 manca il contaore d'esercizio
FF02 E 28 1 contaore d'esercizio: errore di scrittura
FF03 E 28 2 contaore d'esercizio corretto
FF04 E 28 3 contaore d'esercizio convertito
6380 E 30 0 errore di conversione interno
2312 E 31 0 motore I2t
2311 E 31 1 motorcontroller I2t
2313 E 31 2 I2t – PFC
2314 E 31 3 reostato di frenatura I2t
3280 E 32 0 tempo di carica circuito intermedio superato
3281 E 32 1 sottotensione per PFC attivo
3282 E 32 5 sovraccarico shopper di frenatura
3283 E 32 6 tempo di scarica circuito intermedio superato
3284 E 32 7 manca alimentazione di potenza per attivazione del controller
3285 E 32 8 caduta alimentazione di potenza per attivazione del controller
3286 E 32 9 caduta di fase
8A87 E 33 0 errore di posizionamento emulazione dell'encoder
8780 E 34 0 errore di sincronizzazione (sovrasincronizzazione)
8781 E 34 1 errore di sincronizzazione (sincronizzazione disattivata)
8480 E 35 0 protezione contro la rotazione motore lineare
6320 E 36 x parametro limitato
8612 E 40 x finecorsa software raggiunto
8680
E 42 0
posizionamento: l'attuatore si arresta perché manca il posizionamento di
collegamento
8681
E 42 1
posizionamento: l'attuatore si arresta perché l'inversione del senso di rotazione
non è permessa
8682 E 42 2 posizionamento: inversione del senso di rotazione non permessa dopo HALT
8081 E 43 0 finecorsa: valore nominale negativo bloccato
8082 E 43 1 finecorsa: valore nominale positivo bloccato
8083 E 43 2 finecorsa: posizionamento soppresso
8084 E 45 0 alimentazione driver non disattivabile
8085 E 45 1 alimentazione driver non attivabile
8086 E 45 2 alimentazione driver attivata

5. Procedura di accesso
Festo P.BE.CMMP-CO-SW-IT 0708NH 47
Error_code (hex)
Indica- zione
Significato
7580 E 60 0 ethernet I
7581 E 61 0 ethernet II
F080 E 80 0 overflow regolatore di corrente – IRQ
F081 E 80 1 overflow regolatore del numero di giri – IRQ
F082 E 80 2 overflow regolatore di posizione – IRQ
F083 E 80 3 overflow interpolatore – IRQ
F084 E 81 4 overflow low level – IRQ
F085 E 81 5 overflow MDC – IRQ
5080 E 90 x errore hardware
6000 E 91 0 errore di inizializzazione interno
5.5.3 Descrizione degli oggetti
Oggetto 1003h: pre_defined_error_field
Il rispettivo error_code dei messaggi di errore viene registrato anche in una memoria a
quattro livelli. Questa è strutturata come un registro a scorrimento, così nell'oggetto 1003h_01h (standard_error_field_0) è registrato sempre l'ultimo errore che si è verificato. Tramite un accesso di lettura all'oggetto 1003h_00h (pre_defined_error_field) si può
stabilire quanti messaggi sono archiviati momentaneamente nella memoria errori, la quale viene cancellata scrivendo il valore 00h nell'oggetto 1003h_00h (pre_defined_
error_field). Per poter riattivare il modulo terminale del motorcontroller dopo un errore, eseguire anche una tacitazione (vedi capitolo 7.1: ‚Cambiamento di stato 15‛).
Index 1003h
Name pre_defined_error_field
Object Code ARRAY
No. of Elements 4
Data Type UINT32
Sub-Index 01h
Description standard_error_field_0
Access ro
PDO Mapping no
Units --
Value Range --
Default Value --

5. Procedura di accesso
48 Festo P.BE.CMMP-CO-SW-IT 0708NH
Sub-Index 02h
Description standard_error_field_1
Access ro
PDO Mapping no
Units --
Value Range --
Default Value --
Sub-Index 03h
Description standard_error_field_2
Access ro
PDO Mapping no
Units --
Value Range --
Default Value --
Sub-Index 04h
Description standard_error_field_3
Access ro
PDO Mapping no
Units --
Value Range --
Default Value --
5.6 Gestione della rete (servizio NMT)
La gestione della rete permette di pilotare tutte le unità CANopen. Perciò l'identificatore è riservato con la massima priorità (000h).
Tramite il servizio NMT si possono trasmettere istruzioni a uno o a tutti i regolatori. Ogni istruzione è formata da due byte, il primo contiene il codice operativo di istruzione (command specifier, CS) e il secondo l'indirizzo del nodo (node id, NI) del regolatore in
oggetto. Tramite l'indirizzo del nodo ‚zero‛ si possono attivare tutti i nodi presenti nella
rete. Così è possibile che in tutte le apparecchiature venga ad esempio attivato contemporaneamente un reset. I regolatori non tacitano le istruzioni NMT. Solo indirettamente è possibile dedurre una esecuzione riuscita (ad es. tramite il messaggio Bootup dopo un reset).

5. Procedura di accesso
Festo P.BE.CMMP-CO-SW-IT 0708NH 49
Struttura del messaggio NMT:
Identificatore:
000h
Codice di istruzione
Node ID
000h 2 CS NI
Lunghezza
dati
Gli stati per lo stato NMT del nodo CANopen sono definiti in un diagramma. Tramite il byte CS nel messaggio NMT si possono attivare le variazioni di stato, che sono orientate
sostanzialmente allo stato di destinazione.
NMT-State machine Significato CS Stato di destinazione
2 Bootup -- Pre-Operational 7Fh
3 Start Remote Node 01h Operational 05h
4 Enter Pre-Operational 80h Pre-Operational 7Fh
5 Stop Remote Node 02h Stopped 04h
6 Start Remote Node 01h Operational 05h
7 Enter Pre-Operational 80h Pre-Operational 7Fh
8 Stop Remote Node 02h Stopped 04h
9 Reset Communication 82h Reset Communication *1)
10 Reset Communication 82h Reset Communication *1)
11 Reset Communication 82h Reset Communication *1)
12 Reset Application 81h Reset Application *1)
13 Reset Application 81h Reset Application *1)
14 Reset Application 81h Reset Application *1)
*1) Lo stato di destinazione definitivo è Pre-Operational (7Fh), perché
le transizioni 15, 16 e 2 vengono eseguite automaticamente dal
regolatore.
Tab. 5.2: NMT-State machine
Tutte le altre transizioni di stato vengono eseguite automaticamente dal regolatore, ad es. perché l'inizializzazione è ultimata.
Nel parametro NI bisogna specificare il numero di nodo del regolatore oppure zero se si
devono indirizzare tutti i nodi presenti nella rete (Broadcast). Determinati oggetti di comunicazione non possono essere utilizzati in funzione dello stato NMT: così, ad esempio, è assolutamente necessario impostare lo stato NMT su operational in modo che
il regolatore possa trasmettere i PDO.
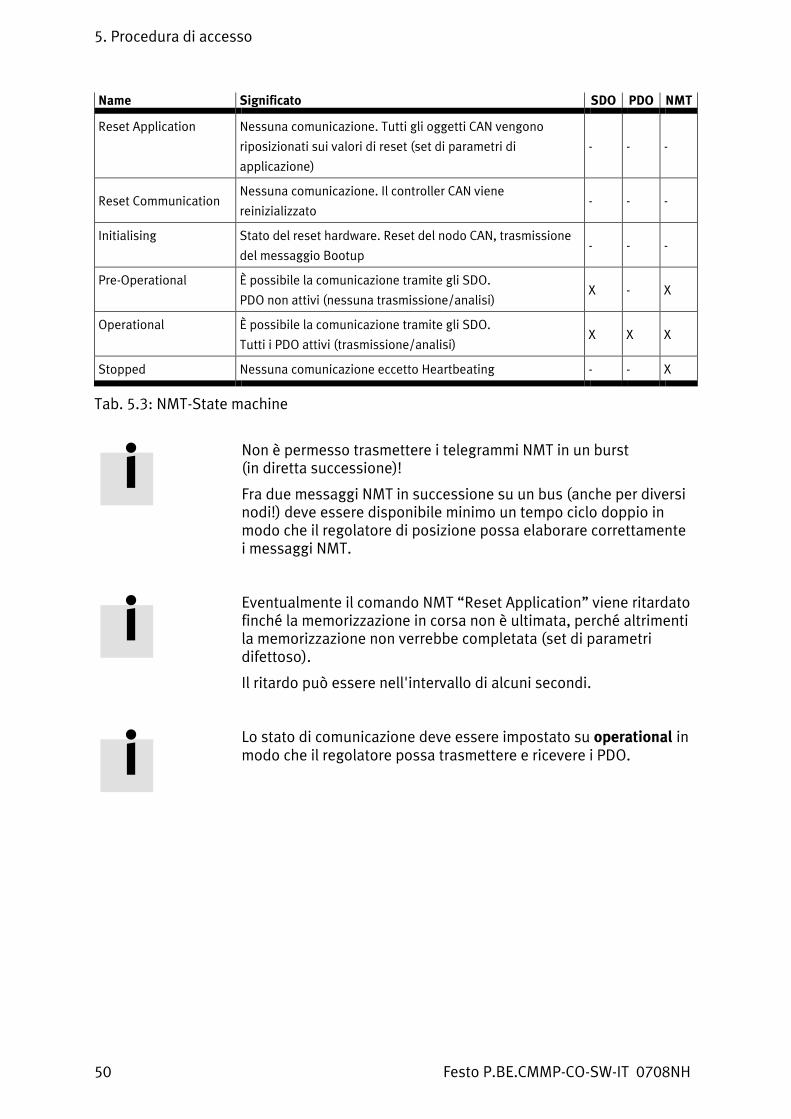
5. Procedura di accesso
50 Festo P.BE.CMMP-CO-SW-IT 0708NH
Name Significato SDO PDO NMT
Reset Application Nessuna comunicazione. Tutti gli oggetti CAN vengono
riposizionati sui valori di reset (set di parametri di
applicazione)
- - -
Reset Communication Nessuna comunicazione. Il controller CAN viene
reinizializzato - - -
Initialising Stato del reset hardware. Reset del nodo CAN, trasmissione
del messaggio Bootup - - -
Pre-Operational È possibile la comunicazione tramite gli SDO.
PDO non attivi (nessuna trasmissione/analisi) X - X
Operational È possibile la comunicazione tramite gli SDO.
Tutti i PDO attivi (trasmissione/analisi) X X X
Stopped Nessuna comunicazione eccetto Heartbeating - - X
Tab. 5.3: NMT-State machine
Non è permesso trasmettere i telegrammi NMT in un burst (in diretta successione)!
Fra due messaggi NMT in successione su un bus (anche per diversi nodi!) deve essere disponibile minimo un tempo ciclo doppio in modo che il regolatore di posizione possa elaborare correttamente i messaggi NMT.
Eventualmente il comando NMT ‚Reset Application‛ viene ritardato finché la memorizzazione in corsa non è ultimata, perché altrimenti la memorizzazione non verrebbe completata (set di parametri difettoso).
Il ritardo può essere nell'intervallo di alcuni secondi.
Lo stato di comunicazione deve essere impostato su operational in modo che il regolatore possa trasmettere e ricevere i PDO.

5. Procedura di accesso
Festo P.BE.CMMP-CO-SW-IT 0708NH 51
5.7 Bootup
5.7.1 Panoramica
Dopo l'inserimento dell'alimentazione di tensione o dopo un reset, il regolatore segnala la fine della fase di inizializzazione con un messaggio Bootup. Poi il regolatore è nello stato NMT preoperational (vedi capitolo 5.6 ‚Gestione della rete: servizio NMT‛)
5.7.2 Struttura del messaggio Bootup
Il messaggio Bootup è strutturato in modo pressoché identico al seguente messaggio Heartbeat.
Viene trasmesso solo uno zero al posto dello stato NMT.
Identificatore:
700h + numero
di nodo
Identificazione messaggio
Bootup
701h 1 0
Lunghezza
dati
5.8 Heartbeat (Error Control Protocol)
5.8.1 Panoramica
Si può attivare il cosiddetto protocollo Heartbeat per monitorare la comunicazione fra slave (attuatore) e master: l'attuatore trasmette ciclicamente dei messaggi al master, il quale può controllare se questi messaggi appaiono periodicamente e quindi adottare apposite misure se essi non arrivano. I due protocolli non possono essere attivi contemporaneamente perché i telegrammi Heartbeat ed anche Nodeguarding (vedi capitolo 5.9) vengono trasmessi con l'identificatore 700h + numero di nodo.
Se i due protocolli vengono attivati contemporaneamente, allora è attivo solo il protocollo Heartbeat.

5. Procedura di accesso
52 Festo P.BE.CMMP-CO-SW-IT 0708NH
5.8.2 Struttura del messaggio Heartbeat
Il telegramma Heartbeat viene trasmesso con l'identificatore 700h + numero di nodo.
Contiene solo 1 byte di dati utili e lo stato NMT del regolatore (vedi capitolo 5.6
‚Gestione della rete: servizio NMT‛).
Identificatore:
700h + numero
di nodo
Stato NMT
701h 1 N
Lunghezza
dati
N Significato
04h Stopped
05h Operational
7Fh Pre-Operational
5.8.3 Descrizione degli oggetti
Oggetto 1017h: producer_heartbeat_time
Per attivare la funzionalità Heartbeat, definire il tempo fra due telegrammi Heartbeat tramite l'oggetto producer_heartbeat_time.
Index 1017h
Name producer_heartbeat_time
Object Code VAR
Data Type UINT16
Access rw
PDO no
Units ms
Value Range 0 … 65535
Default Value 0
Il producer_heartbeat_time può essere memorizzato nel set di parametri. Se il regolatore viene avviato con un producer_heartbeat_time non uguale a zero, allora il messaggio
Bootup viene considerato il primo Heartbeat.
Il regolatore può essere utilizzato solo in funzione di Heartbeat Producer. Perciò l'oggetto 1016h (consumer_heartbeat_time) è implementato solo per motivi di compatibilità e
riproduce sempre 0.
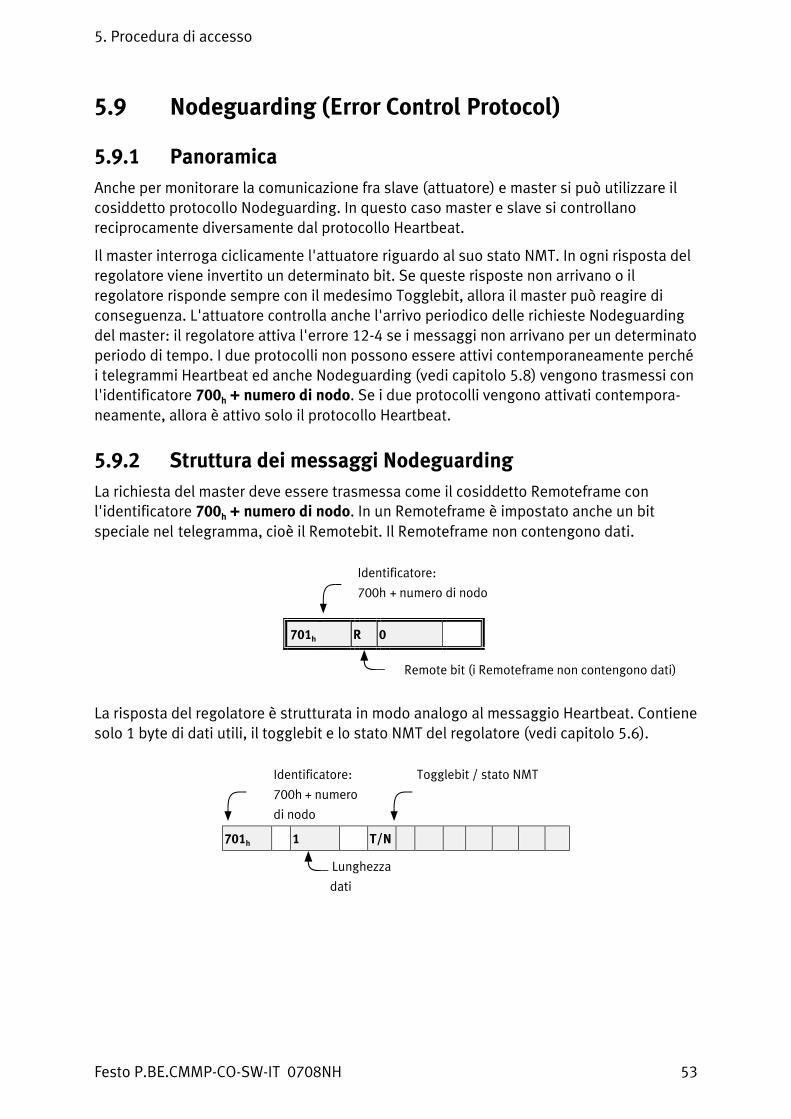
5. Procedura di accesso
Festo P.BE.CMMP-CO-SW-IT 0708NH 53
5.9 Nodeguarding (Error Control Protocol)
5.9.1 Panoramica
Anche per monitorare la comunicazione fra slave (attuatore) e master si può utilizzare il cosiddetto protocollo Nodeguarding. In questo caso master e slave si controllano reciprocamente diversamente dal protocollo Heartbeat.
Il master interroga ciclicamente l'attuatore riguardo al suo stato NMT. In ogni risposta del regolatore viene invertito un determinato bit. Se queste risposte non arrivano o il regolatore risponde sempre con il medesimo Togglebit, allora il master può reagire di conseguenza. L'attuatore controlla anche l'arrivo periodico delle richieste Nodeguarding del master: il regolatore attiva l'errore 12-4 se i messaggi non arrivano per un determinato periodo di tempo. I due protocolli non possono essere attivi contemporaneamente perché i telegrammi Heartbeat ed anche Nodeguarding (vedi capitolo 5.8) vengono trasmessi con l'identificatore 700h + numero di nodo. Se i due protocolli vengono attivati contempora-
neamente, allora è attivo solo il protocollo Heartbeat.
5.9.2 Struttura dei messaggi Nodeguarding
La richiesta del master deve essere trasmessa come il cosiddetto Remoteframe con l'identificatore 700h + numero di nodo. In un Remoteframe è impostato anche un bit
speciale nel telegramma, cioè il Remotebit. Il Remoteframe non contengono dati.
Identificatore:
700h + numero di nodo
701h R 0
La risposta del regolatore è strutturata in modo analogo al messaggio Heartbeat. Contiene solo 1 byte di dati utili, il togglebit e lo stato NMT del regolatore (vedi capitolo 5.6).
Identificatore:
700h + numero
di nodo
Togglebit / stato NMT
701h 1 T/N
Lunghezza
dati
Remote bit (i Remoteframe non contengono dati)

5. Procedura di accesso
54 Festo P.BE.CMMP-CO-SW-IT 0708NH
Il primo byte di dati (T/N) è strutturato nel modo seguente:
Bit Valore Name Significato
7 80h toggle_bit Cambia con ogni telegramma
0 … 6 7Fh nmt_state 04h Stopped
05h Operational
7Fh Pre-Operational
Il tempo di monitoraggio per le richieste del master è parametrabile. Il monitoraggio inizia con la prima richiesta Remote ricevuta del master. A partire da questo momento le richieste Remote devono arrivare prima che scada il tempo di monitoraggio impostato, altrimenti viene attivato l'errore 12-4.
Il togglebit viene risettato tramite il comando NMT Reset Communication. Perciò è
cancellato nella prima risposta del regolatore.
5.9.3 Descrizione degli oggetti
Oggetto 100Ch: guard_time
Per attivare il monitoraggio Nodeguarding, parametrare il tempo max. fra due richieste
Remote del master. Questo tempo viene determinato nel regolatore dal prodotto di guard_time (100Ch) e life_time_factor (100Dh). Perciò si consiglia di descrivere con 1 il life_time_factor e poi di assegnare direttamente il tempo in millisecondi tramite il guard_time.
Index 100Ch Name guard_time
Object Code VAR
Data Type UINT16
Access rw
PDO Mapping no
Units ms
Value Range 0 … 65535
Default Value 0

5. Procedura di accesso
Festo P.BE.CMMP-CO-SW-IT 0708NH 55
5.9.4 Oggetto 100Dh: life_time_factor
Si consiglia di descrivere con 1 il life_time_factor e di assegnarlo direttamente tramite il guard_time.
Index 100Dh
Name life_time_factor
Object Code VAR
Data Type UINT8
Access rw
PDO Mapping no
Units --
Value Range 0, 1
Default Value 0
Tab. degli identificatori
La seguente tabella fornisce un quadro generale degli identificatori utilizzati.
Tipo di oggetto Identificatore (esadecimale) Note
SDO (host su controller) 600h +numero di nodo
SDO (controller su host) 580h +numero di nodo
TPDO1 181h Valori standard
All'occorrenza possono essere
modificati
TPDO2 281h
TPDO3 381h
TPDO4 481h
RPDO1 201h
RPDO2 301h
RPDO3 401h
RPDO4 501h
SYNC 080h
EMCY 080h + numero di nodo
HEARTBEAT 700h + numero di nodo
NODEGUARDING 700h + numero di nodo
BOOTUP 700h + numero di nodo
NMT 000h

6. Impostare parametri
56 Festo P.BE.CMMP-CO-SW-IT 0708NH
6. Impostare parametri Occorre adattare numerosi parametri al motore utilizzato e all'applicazione specifica prima che il motorcontroller possa eseguire le funzioni richieste (regolazione della
coppia/velocità, posizionamento). Si consiglia di procedere osservando la successione riportata nei capitoli seguenti. Al termine dell'impostazione dei parametri vengono descritti il sistema di comando delle apparecchiature e l'impiego dei singoli modi operativi.
Il display a 7 segmenti visualizza una ‚A‛ (Attention) se il motorcontroller non è stato ancora parametrato in modo appropriato. Se il motorcontroller deve essere parametrato completamente tramite CANopen, allora descrivere l'oggetto 6510h_C0h per sopprimere questa indicazione (vedi pagina 134 Oggetto 6510h_C0h: commissioning_state).
Nell'indice degli oggetti sono presenti, oltre ai parametri qui descritti dettagliatamente, altri parametri che devono essere implementati secondo CANopen. Però in genere non contengono informazioni che possono essere utilizzate in modo appropriato per la creazione di una applicazione con la serie CMMP. Eventualmente leggere le specifiche di simili oggetti in [1] e [2] (vedi pagina 10).
6.1 Caricare e memorizzare set di parametri
6.1.1 Panoramica
Il motorcontroller dispone di tre set di parametri.
- Set di parametri corrente
Questo set è registrato nella memoria volatile (RAM) del motorcontroller. Può essere letto e scritto a piacere con il software di parametrazione o tramite il CAN-Bus. All'avviamento del motorcontroller, il set di parametri di applicazione viene copiato nel set di parametri corrente.
- Set di parametri default
In questo caso si tratta di un set immutabile prestabilito dal costruttore secondo lo standard. Mediante una operazione di scrittura nell'oggetto CANopen 1011h_01h (restore_all_default_parameters), il set di parametri default può essere copiato nel set di parametri corrente. Questa operazione di copiatura è possibile solo se il modulo
terminale è disattivato.
- Set di parametri di applicazione Il set di parametri corrente può essere salvato nella memora flash non volatile.
L'operazione di memorizzazione viene attivata con un accesso di scrittura all'oggetto CANopen 1010h_01h (save_all_parameters). All'avvimento del motorcontroller il il set
di parametri di applicazione viene copiato nel set di parametri corrente.

6. Impostare parametri
Festo P.BE.CMMP-CO-SW-IT 0708NH 57
La grafica seguente mostra la correlazione fra i singoli set di parametri.
Default parameter set Application-specific parameter set
CANopenObject 1011
System switched on
CANopenObject 1010
Current parameter set
Fig. 6.1: Correlazione fra set di parametri
Sono possibili due concetti diversi per gestire i set di parametri.
1. Il set di parametri viene creato con il software di parametrazione e trasferito completamente nei singoli controller. Seguendo questa procedura bisogna solo
impostare gli oggetti tramite il CAN-Bus, accessibili unicamente attraverso CANopen. Lo svantaggio consiste nel fatto che è necessario un software di parametrazione per
la messa in funzione di una nuova macchina o in caso di riparazione (sostituzione del
controller). Perciò questa procedura è consigliabile solo per pezzi singoli.
2. Questa variante si basa sul fatto che la maggior parte dei set di applicazione specifici differiscono solo in alcuni parametri dal set default. Così è possibile che il set di
parametri corrente venga ricreato tramite il CAN-Bus dopo ogni avviamento dell'impianto. A questo scopo il sistema di comando host richiama prima il set di
parametri default (richiamo dell'oggetto CANopen 1011h_01h (restore_all_default_
parameters). Poi vengono trasmessi solo gli oggetti che differiscono. L'intera
operazione dura meno di 1 secondo per ogni controller. Questa procedura offre il vantaggio di funzionare anche nei controller non parametrati, quindi non costituiscono un problema la messa in funzione di nuovi impianti o la sostituzione di singoli controller e il software di parametrazione non è necessario. Si consiglia di impiegare questo metodo.
Avvertenza
Prima di avviare il modulo terminale, assicurarsi che il controller contenga veramente i parametri richiesti.
Un controller parametrato erratamente può girare in modo incontrollato e quindi causare danni a persone o cose.

6. Impostare parametri
58 Festo P.BE.CMMP-CO-SW-IT 0708NH
6.1.2 Descrizione degli oggetti
Oggetto 1011h: restore_default_parameters
Index 1011h
Name restore_parameters
Object Code ARRAY
No. of Elements 1
Data Type UINT32
Sub-Index 01h
Description restore_all_default_parameters
Access rw
PDO Mapping no
Units --
Value Range 64616F6Ch ("load")
Default Value 1 (read access)
L'oggetto 1011h_01h (restore_all_default_parameters) permette di trasferire il set di
parametri corrente in uno stato definito. Perciò copiare il set di parametri default nel set
di parametri corrente. L'operazione di copiatura viene attivata tramite un accesso di
scrittura a questo oggetto, per cui assegnare la stringa ‚load‛ in forma esadecimale come record di dati.
Questa istruzione viene eseguita solo se il modulo terminale è disattivato. In caso contrario viene generato l'errore SDO ‚Impossibile trasferire o memorizzare dati perché il motorcontroller non è nello stato corretto‛. Trasmettendo l'identificazione errata viene generato l'errore ‚Impossibile trasferire o memorizzare dati‛. Accedendo con lettura all'oggetto viene restituito un 1 per indicare che il reset sui valori default viene supportato.
In questo caso restano invariati i parametri della comunicazione CAN (numero del nodo, baudrate e modo operativo) e numerose impostazioni del resolver (che richiedono parzialmente un reset per essere attivate).

6. Impostare parametri
Festo P.BE.CMMP-CO-SW-IT 0708NH 59
Oggetto 1010h: store_parameters
Index 1010h
Name store_parameters
Object Code ARRAY
No. of Elements 1
Data Type UINT32
Sub-Index 01h
Description save_all_parameters
Access rw
PDO Mapping no
Units --
Value Range 65766173h ("save")
Default Value 1
Se il set default deve essere trasferito nel set di applicazione, allora richiamare anche l'oggetto 1010h_01h (save_all_parameters).
Se l'oggetto viene scritto tramite un SDO, la reazione default fa sì che all'SDO venga risposto immediatamente. Così la risposta riflette la fine dell'operazione di memorizzazione.
Tuttavia la reazione può essere modificata tramite l'oggetto 6510h_F0h
(compatibility_control).
6.2 Impostazioni di compatibilità
6.2.1 Panoramica
È stato inserito l'oggetto compatibility_control per poter essere compatibili con
implementazioni CANopen precedenti (ad es. anche in altre serie di unità) e poter eseguire modifiche e correzioni rispetto a DSP402 e DS301. Questo oggetto fornisce 0 nel set di parametri default, cioè la compatibilità con versioni precedenti. Per le nuove applicazioni si consiglia di impostare bit definiti allo scopo di permettere un'elevata concordanza con gli standard menzionati.
6.2.2 Descrizione degli oggetti
Oggetti trattati in questo capitolo
Index Oggetto Name Tipo Attr.
6510h_F0h VAR compatibility_control UINT16 rw

6. Impostare parametri
60 Festo P.BE.CMMP-CO-SW-IT 0708NH
Oggetto 6510h_ F0h: compatibility_control
Sub-Index F0h
Description compatibility_control
Data Type UINT16
Access rw
PDO Mapping no
Units --
Value Range 0 … 1FFh, vedi tabella
Default Value 0
Bit Valore Name
0 0001h homing_method_scheme*
1 0002h reserved
2 0004h homing_method_scheme
3 0008h reserved
4 0010h response_after_save
5 0020h reserved
6 0040h homing_to_zero
7 0080h device_control
8 0100h reserved
Bit 0 homing_method_scheme*
Il bit ha lo stesso significato del bit 2 ed è presente per motivi di compatibilità. Impostando il
bit 2 viene impostato anche questo bit e viceversa.
Bit 1 reserved
Il bit è riservato. Non può essere impostato.
Bit 2 homing_method_scheme
Se questo bit è impostato, i metodi della corsa di riferimento 32 … 35 sono numerati secondo
DSP402, in caso contrario la numerazione è compatibile con implementazioni precedenti
(vedi anche capitolo 0). Impostando questo bit viene impostato anche il bit 0 e viceversa.
Bit 3 reserved
Il bit è riservato. Non può essere impostato.
Bit 4 response_after_save
Se questo bit è impostato, la risposta viene trasmessa su save_all_parameters solo se la
memorizzazione è stata ultimata. Questa operazione può durare parecchi secondi, il che può
eventualmente determinare un time-out nel sistema di comando. Se il bit è cancellato, la
risposta è immediata, tuttavia tenere presente che la memorizzazione non è ancora ultimata.

6. Impostare parametri
Festo P.BE.CMMP-CO-SW-IT 0708NH 61
Bit 5 reserved
Il bit è riservato. Non può essere impostato.
Bit 6 homing_to_zero
Finora una corsa di riferimento sotto CANopen è formata solo da 2 fasi (corsa di ricerca e corsa di
scorrimento). Poi l'attuatore non trasla sulla posizione zero determinata (che ad es. tramite
l'homing_offset può essere spostata rispetto alla posizione di riferimento trovata).
Impostando questo bit, la reazione standard viene modificata e l'attuatore aggiunge alla corsa di
riferimento una corsa su zero. Vedi anche capitolo 8.2 Modo operativo corsa di riferimento
(Homing Mode)
Bit 7 device_control
Se questo bit è impostato, il bit 4 dello statusword (voltage_enabled) viene emesso secondo
DSP402 v2.0.
Inoltre lo stato FAULT_REACTION_ACTIVE è distinguibile dalla stato FAULT.
Vedi capitolo 7.
Bit 8 reserved
Il bit è riservato. Non può essere impostato.
6.3 Fattori di conversione (Factor Group)
6.3.1 Panoramica
I motorcontroller vengono utilizzati in numerosi casi d'impiego: come attuatore diretto, con meccanismo a valle, per attuatori lineari ecc. Per permettere una parametrazione semplice per tutti questi casi d'impiego, il motorcontroller può essere parametrato utilizzando i Factor Group in modo che l'utilizzatore possa immettere o leggere sulla presa di moto tutte le grandezze direttamente nelle unità desiderate, come il numero di giri (ad es. su un attuatore lineare i valori di posizione in millimetri e velocità in millimetri/ secondo). Poi con l'ausilio dei Factor Group il motorcontroller converte le immissioni in unità interne. Per ogni grandezza fisica (posizione, velocità e accelerazione) è disponibile un fattore di conversione per adattare le unità dell'utilizzatore alla propria applicazione. Le unità impostate con i Factor Group vengono generalmente chiamate position_units, speed_units o acceleration_units. Lo schizzo qui visibile illustra la funzione dei Factor
Group.

6. Impostare parametri
62 Festo P.BE.CMMP-CO-SW-IT 0708NH
Fig. 6.2: Factor Group
Tutti i parametri vengono memorizzati nelle unità interne del motorcontroller e convertiti con l'ausilio dei Factor Group solo al momento della scrittura o lettura.
Perciò i Factor Group dovrebbero essere impostati prima della parametrazione e non
modificati durante una parametrazione.
In condizione standard, i Factor Group sono impostati sulle unità qui elencate:
Grandezza Denominazione Unità Spiegazione
lunghezza position_units incrementi 65536 incrementi/giro
velocità speed_units min-1 giri/minuto
accelerazione acceleration_units (min-1)/s aumento del numero di giri/secondo
6.3.2 Descrizione degli oggetti
Oggetti trattati in questo capitolo
Index Oggetto Name Tipo Attr.
6093h ARRAY position_factor UINT32 rw
6094h ARRAY velocity_encoder_ factor UINT32 rw
6097h ARRAY acceleration_factor UINT32 rw
607Eh VAR polarity UINT8 rw

6. Impostare parametri
Festo P.BE.CMMP-CO-SW-IT 0708NH 63
Oggetto 6093h: position_factor
L'oggetto position_factor serve per convertire tutte le unità di lunghezza dell'applicazione dalle position_units all'unità interna incrementi (65536 incrementi corrispondono a
1 giro). È formato da numeratore e denominatore.
Fig. 6.3: Quadro riassuntivo: Factor Group
Index 6093h
Name position_factor
Object Code ARRAY
No. of Elements 2
Data Type UINT32
Sub-Index 01h
Description numerator
Access rw
PDO Mapping yes
Units --
Value Range --
Default Value 1
Sub-Index 02h
Description divisor
Access rw
PDO Mapping yes
Units --
Value Range --
Default Value 1

6. Impostare parametri
64 Festo P.BE.CMMP-CO-SW-IT 0708NH
Nella formula di calcolo del position_factor entrano le seguenti grandezze:
gear_ratio Rapporto di trasmissione fra giri su entrata movimento (GON) e giri su uscita movimento (GOFF)
feed_constant Rapporto fra giri su uscita movimento (GOFF) e movimento in position_units (ad es. 1 giro = 360° gradi)
Il calcolo del position_factor viene eseguito con la seguente formula:
position_factor = nummerator
= gear_ratio x 65536
divisor feed_constant
Il position_factor deve essere scritto nel motorcontroller separatamente secondo
numeratore e denominatore. Perciò può essere necessario portare la frazione su numeri interi moltiplicando numeratore e denominatore per uno stesso numero.
Il position_factor non deve essere maggiore di 224
ESEMPIO
Prima bisogna definire l'unità richiesta (colonna 1) e le posizioni dopo la
virgola (DV), nonché determinare il fattore di trasmissione ed eventualmente la
costante di avanzamento dell'applicazione. Poi questa costante di avanzamento
viene rappresentata nelle unità di posizione desiderate (colonna 2).
Infine inserire tutti i valori nella formula e calcolare la frazione.
1.) Unità desiderata su uscita movimento (position_units)
2.) Feed_constant: Quante position_units sono 1 giro (GOFF)
3.) Fattore di trasmissione (gear_ratio): GON per GOFF
4.) Inserire i valori nella formula
1. 2. 3. 4. RISULTATO
accorciato
Incrementi, 0 DV
Inc.
1 GOFF =
65536 inc 1/1
Ink
Ink
U
Ink
U
Ink
U
U
1
1
1
65536
655361
1
num:1 1
div:1 1
Gradi, 1 DV
1/10 gradi
(°/10)
1 GOFF =
3600 °/10
1/1 1010
1
3600
655361
1
3600
65536 Ink
U
U
Ink
U
U
num:4096 4096
div:225 225

6. Impostare parametri
Festo P.BE.CMMP-CO-SW-IT 0708NH 65
Giri, 2 DV
1/100 giri
(G/100)
1 GOFF =
100 G/100
1/1 100
U100
U
Ink
U
U
Ink
U
U
100
65536
1
001
655361
1
num:16384 16384
div:25 25
2/3 100100
1
001
655363
2
UU
Ink
U
U
Ink
U
U
300
131072
num:32768 32768
div:75 75
mm, 1 DV
1/10 mm
(mm/10)
63.15 mm/G
1 GOFF =
631.5 mm/10
4/5
10mm
10mm
Ink
U
U
Ink
U
U
31575
2621440
1
631.5
655365
4
num:524288 524288
div:6315 6315
6094h: velocity_encoder_factor
L'oggetto velocity_encoder_factor serve per convertire tutti i valori di velocità dell'applicazione dalle speed_units all'unità interna giri per 4096 minuti. È formato da
numeratore e denominatore.
Index 6094h
Name velocity_encoder_factor
Object Code ARRAY
No. of Elements 2
Data Type UINT32
Sub-Index 01h
Description numerator
Access rw
PDO Mapping yes
Units --
Value Range --
Default Value 1000h
Sub-Index 02h
Description divisor
Access rw
PDO Mapping yes
Units --
Value Range --
Default Value 1

6. Impostare parametri
66 Festo P.BE.CMMP-CO-SW-IT 0708NH
In linea di massima il calcolo del velocity_encoder_factor è formato da due parti: un fattore di conversione di unità di lunghezza interne in position_units e un fattore di
conversione in unità di tempo interne in unità definite dall'utente (ad es. da secondi a minuti). La prima parte corrisponde al calcolo del position_factor, invece per la seconda
parte viene aggiunto un fattore supplementare.
time_factor_v Rapporto fra unità di tempo interna e unità di tempo definita dall'utente (ad es. 1 min = 1/4096 4096 min)
gear_ratio Rapporto di trasmissione fra giri su entrata movimento (GON) e giri su uscita movimento (GOFF)
feed_constant Rapporto fra giri su uscita movimento (GOFF) e movimento in position_units (ad es. 1 giro = 360° gradi)
Il calcolo del velocity_encoder_factor viene eseguito con la seguente formula:
Velocity_encoder_factor = nummerator
= gear_ratio x time_factor_v
divisor feed_constant
Il velocity_encoder_factor non deve essere maggiore di 224
Anche il velocity_encoder_factor viene scritto, come il position_factor, nel
motorcontroller separato secondo numeratore e denominatore. Perciò può essere necessario portare la frazione su numeri interi moltiplicando numeratore e denominatore per uno stesso numero.

6. Impostare parametri
Festo P.BE.CMMP-CO-SW-IT 0708NH 67
ESEMPIO
Prima bisogna definire l'unità richiesta (colonna 1) e le posizioni dopo
la virgola (DV), nonché determinare il fattore di trasmissione ed
eventualmente la costante di avanzamento dell'applicazione. Poi questa
costante di avanzamento viene rappresentata nelle unità di posizione
desiderate (colonna 2). In seguito convertire l'unità di tempo desiderata
nell'unità di tempo del motorcontroller (colonna 3).
Infine inserire tutti i valori nella formula e calcolare la frazione.
1.) Unità desiderata su uscita movimento (speed_units)
2.) Feed_constant: Quante position_units sono 1 giro (GOFF)?
3.) time_factor_v: Unità di tempo desiderata per ogni unità di tempo
interna
4.) Fattore di trasmissione (gear_ratio) GON per GOFF
5.) Inserire i valori nella formula
1. 2. 3. 4. 5. RISULTATO
accorciato
G/min 0 DV G/min
1 GOFF =
1 GOFF
1 min
1
=
4096 min4096
1
1/1 min
U
4096minU
min1
4096min1
1
4096
U
U
U
U
1
1
1
4096
1
1
num:4096 4096
div:1 1
G/min 2 DV
1/100 G/min
(G/100 min)
1 GOFF =
100 G/100
1 min
1
=
4096 min4096
1
2/3 100min
U
4096minU
min1
4096min1
300
8192
U
U
U
100U
1
100
1
4096
3
2
num:2048 2048
div:75 75
°/s 1 DV
1/10 °/s
(°/10s)
1 GOFF =
3600 °/10
1 s
1
=
60 min
1
=60·40
96 min4096
1
1/1 10s10
U
U
U
3600
245760 4096minU
min1
4096min1
1
3600
1
409660
1
1
num:1024 1024
div:15 15
mm/s 1 DV
1/10 mm/s
(mm/10s)
63.15 mm/G
1 GOFF =
631.5 mm/10
1 s
1
=
60 min
1
= 60·4096
min4096
1
4/5 s10
mm
min4096U
s1
4096min1
6315
1966080
U
U
U
10mm
1
5.631
1
409660
5
4
num:131072 131072
div:412 421

6. Impostare parametri
68 Festo P.BE.CMMP-CO-SW-IT 0708NH
Oggetto 6097h: acceleration_factor
L'oggetto acceleration_factor serve per convertire tutti i valori di accelerazione dell'applicazione dalle acceleration_units alle unità interne giri per minuto per
256 secondi. È formato da numeratore e denominatore.
Index 6097h
Name acceleration_factor
Object Code ARRAY
No. of Elements 2
Data Type UINT32
Sub-Index 01h
Description numerator
Access rw
PDO Mapping yes
Units --
Value Range --
Default Value 100h
Sub-Index 02h
Description divisor
Access rw
PDO Mapping yes
Units --
Value Range --
Default Value 1
Anche il calcolo del acceleration_factor è formato da due parti: un fattore di conversione di unità di lunghezza interne in position_units e un fattore di conversione di unità di
tempo interne al quadrato in unità al quadrato definite dall'utente (ad es. da secondi2 a minuti2). La prima parte corrisponde al calcolo del position_factor, invece per la seconda
parte viene aggiunto un fattore supplementare.
time_factor_a Rapporto fra unità di tempo interna al quadrato e unità di tempo al quadrato definita dall'utente (ad es. 1 min2 = 1 min 1 min = 60 s 1 min = 60/256 256 min s)
gear_ratio Rapporto di trasmissione fra giri su entrata movimento (GON) e giri su uscita movimento (GOFF)
feed_constant Rapporto fra giri su uscita movimento (GOFF) e movimento in position_units (ad es. 1 giro = 360° gradi)

6. Impostare parametri
Festo P.BE.CMMP-CO-SW-IT 0708NH 69
Il calcolo del acceleration_factor viene eseguito con la seguente formula:
acceleration_factor = nummerator
= gear_ratio x time_factor_a
divisor feed_constant
Anche l'acceleration_factor viene scritto nel motorcontroller separatamente secondo
numeratore e denominatore, così la frazione deve essere eventualmente moltiplicata per lo stesso numero.
ESEMPIO
Prima bisogna definire l'unità richiesta (colonna 1) e le posizioni dopo
la virgola (DV), nonché determinare il fattore di trasmissione ed
eventualmente la costante di avanzamento dell'applicazione. Poi questa
costante di avanzamento viene rappresentata nelle unità di posizione
desiderate (colonna 2). In seguito convertire l'unità di tempo desiderata2
nell'unità di tempo2 del motorcontroller (colonna 3). Infine inserire
tutti i valori nella formula e calcolare la frazione.
1.) Unità desiderata su uscita movimento (acceleration_units)
2.) Feed_constant: Quante position_units sono 1 giro (GOFF)?
3.) time_factor_a: Unità di tempo desiderata 2 per ogni unità di tempo
interna 2
4.) Fattore di trasmissione (gear_ratio) GON per GOFF
5.) Inserire i valori nella formula
1. 2. 3. 4. 5. RISULTATO
accorciato
G/min/s 0 DV
U/min s
1 GOFF = 1 smin
1
=
256 s256
min
1
1/1
sminU
s256minU
smin1
s min 2561
1
256
U
U
U
U
1
1
1
256
1
1
num: 256 1 GOFF div: 1
°/s² 1 DV
1/10 °/s²
(°/10s²)
1 GOFF =
3600 °/10
12s
1
=
60 smin
1
=
60·256 s256
min
1
1/1 2s 10
s256minU
1
smin 2561
3600
15360
U
U
U
10
s
1
3600
1
25660
1
1
2
num: 64 div: 15

6. Impostare parametri
70 Festo P.BE.CMMP-CO-SW-IT 0708NH
G/min² 2 DV
1/100 G/min²
(G/100 min²)
1 GOFF =
100 G/100
12min
1
=
60
1
s
min
1
=
60
256
s256
min
1
2/3 2min 100
U
s 256min
U
min1
smin 2561
18000
512
U
U
U
U
1
100
60
256
3
2
100
2
num: 32 div: 1125
mm/s² 1 DV
1/10 mm/s²
(mm/10s²)
63.15 mm/G
1 GOFF =
631.5 mm/10
12s
1
=
60 smin
1
=
60·256 s256
min
1
4/5 2s 10
mm
s 256min
U
s1
smin 2561
6315
122880
U
U
U
mm
1
5.631
1
25660
5
4
10
2
num: 8192 div: 421
Oggetto 607Eh: polarity
Il segno aritmetico dei valori di posizione e velocità del motorcontroller può essere impostato con l'apposito polarity_flag, la cui funzione consiste nell'invertire il senso di rotazione del motore con gli stessi valori nominali.
Nella maggior parte delle applicazioni è opportuno impostare il position_polarity_flag e il velocity_polarity_flag sullo stesso valore.
L'impostazione del polarity_flag condiziona solo i parametri durante la lettura e scrittura. Non vengono modificati i parametri già presenti nel motorcontroller.
Index 607Eh
Name polarity
Object Code VAR
Data Type UINT8
Access rw
PDO Mapping yes
Units --
Value Range 40h, 80h, C0h
Default Value 0
Bit Valore Name Significato
6 40h velocity_polarity_flag 0: multiply by 1 (default)
1: multiply by -1 (invers)
7 80h position_polarity_flag 0: multiply by 1 (default)
1: multiply by -1 (invers)

6. Impostare parametri
Festo P.BE.CMMP-CO-SW-IT 0708NH 71
6.4 Parametri del modulo terminale
6.4.1 Panoramica
La tensione di rete viene alimentata tramite un circuito di precarica nel modulo terminale. Inserendo l'alimentazione di potenza, la corrente di entrata viene limitata e la carica controllata. Una volta precaricato il circuito intermedio, il circuito di carica viene bypassato. Questo stato costituisce una premessa per impartire l'abilitazione al regolatore. La tensione di rete raddrizzata viene livellata con i condensatori del circuito intermedio. Da quest'ultimo viene alimentato il motore tramite gli IGBT. Nel modulo terminale sono incorporate una serie di funzioni di sicurezza che possono essere parzialmente parametrate: Logica di abilitazione del regolatore (abilitazione software e hardware) Monitoraggio della sovracorrente Monitoraggio della sovratensione/sottotensione del circuito intermedio Monitoraggio dell'unità di potenza.
6.4.2 Descrizione degli oggetti
Index Oggetto Name Tipo Attr.
6510h VAR drive_data
Oggetto 6510h_10h: enable_logic
Per poter attivare il modulo terminale del motorcontroller, impostare gli ingressi digitali ‚abilitazione modulo terminale‛ e ‚abilitazione regolatore‛: l'abilitazione del modulo terminale agisce direttamente sui segnali di pilotaggio dei transistori di potenza, che sono in grado di interrompere i segnali anche se il microprocessore è difettoso. Così la
disattivazione dell'abilitazione del modulo quando il motore è in funzione determina l'arresto senza decelerazione del motore o questo viene arrestato solo tramite il freno eventualmente presente. L'abilitazione del regolatore viene elaborata dal microcontroller del motorcontroller. Disattivando questo segnale, il motorcontroller reagisce in modo diverso a seconda del modo operativo.
- Esercizio di posizionamento e funzionamento a velocità regolata
Una volta disattivato il segnale, il motore viene decelerato con una rampa di frenatura definita. Il modulo terminale viene disinserito solo se il numero di giri del motore è inferiore a 10 min-1 e ha azionato il freno di arresto eventualmente presente.
- Esercizio a coppia regolata
Il modulo terminale viene disinserito immediatamente dopo la disattivazione del segnale. Contemporaneamente viene azionato un freno di arresto eventualmente presente. Di conseguenza il motore si arresta senza decelerazione o viene arrestato tramite il freno.

6. Impostare parametri
72 Festo P.BE.CMMP-CO-SW-IT 0708NH
Avvertenza
Tensione che può essere mortale!
I due segnali non garantiscono che il motore sia diseccitato.
Durante il funzionamento del motorcontroller tramite il CAN-Bus i due ingressi digitali abilitazione modulo terminale e abilitazione regolatore possono essere applicati insieme
su 24 V e l'abilitazione può essere pilotata tramite il CAN-Bus. Perciò impostare l'oggetto 6510h_10h (enable_logic) su due. Per motivi di sicurezza questa operazione viene
eseguita automaticamente all'attivazione di CANopen (anche dopo un reset del motorcontroller).
Index 6510h
Name drive_data
Object Code RECORD
No. of Elements 51
Sub-Index 10h
Description enable_logic
Data Type UINT16
Access rw
PDO Mapping no
Units --
Value Range 0 … 2
Default Value 2
Valore Significato
0 ingressi digitali abilitazione modulo terminale
+ abilitazione regolatore
1 ingressi digitali abilitazione modulo terminale
+ abilitazione regolatore + RS232
2 ingressi digitali abilitazione modulo terminale
+ abilitazione regolatore + CAN
Oggetto 6510h_30h: pwm_frequency
Le perdite di commutazione del modulo terminale sono proprorzionali alla frequenza di commutazione dei transistori di potenza. Da alcune unità della serie CMMP si può prelevare un po' più di potenza dimezzando la normale frequenza PWM. Però in questo modo aumenta l'ondulazione della corrente determinata dal modulo terminale. La commutazione è possibile solo se il modulo terminale è disattivato.

6. Impostare parametri
Festo P.BE.CMMP-CO-SW-IT 0708NH 73
Sub-Index 30h
Description pwm_frequency
Data Type UINT16
Access rw
PDO Mapping no
Units --
Value Range 0, 1
Default Value 0
Valore Significato
0 frequenza normale del modulo terminale
1 mezza frequenza del modulo terminale
Oggetto 6510h_3Ah: enable_enhanced_modulation
Con l'oggetto enable_enhanced_modulation si può attivare la modulazione sinusoidale
ampliata, che permette di utilizzare meglio la tensione del circuito intermedio e quindi di aumentare il numero di giri di circa il 14 %. È svantaggiosa in determinate applicazioni perché il comportamento di regolazione e il funzionamento rotondo del motore peggio-
rano leggermente quando il numero di giri è minimo. L'accesso in scrittura è possibile solo se il modulo terminale è disattivato. Per confermare la modifica, salvare il set di parametri ed eseguire un reset.
Sub-Index 3Ah
Description enable_enhanced_modulation
Data Type UINT16
Access rw
PDO Mapping no
Units --
Value Range 0, 1
Default Value 0
Valore Significato
0 modulazione sinusoidale ampliata OFF
1 modulazione sinusoidale ampliata ON
La modulazione sinusoidale ampliata viene attivato solo dopo un reset. Così memorizzare prima il set di parametri (save_all_parameters) e poi eseguire un reset.

6. Impostare parametri
74 Festo P.BE.CMMP-CO-SW-IT 0708NH
Oggetto 6510h_31h: power_stage_temperature
La temperatura del modulo terminale può essere rilevata tramite l'oggetto power_stage_
temperature. Il modulo terminale viene disattivato e appare un messaggio di errore se la
temperatura indicata nell'oggetto 6510h_32h (max_power_stage_temperature) viene
superata.
Sub-Index 31h
Description power_stage_temperature
Data Type INT16
Access ro
PDO Mapping yes
Units °C
Value Range --
Default Value ..
Oggetto 6510h_32h: max_power_stage_temperature
La temperatura del modulo terminale può essere rilevata tramite l'oggetto 6510h_31h (power_stage_temperature). Il modulo terminale viene disattivato e appare un messaggio
di errore se la temperatura indicata nell'oggetto max_power_stage_temperature viene
superata.
Sub-Index 32h
Description max_power_stage_temperature
Data Type INT16
Access ro
PDO Mapping no
Units °C
Value Range 100
Default Value in funzione dell'unità
Tipo di unità Valore
CMMP-AS-C2-3A 100 °C
CMMP-AS-C5-3A 80 °C
CMMP-AS-C5-11A-P3 4O
CMMP-AS-C10-11A-P3 80 °C
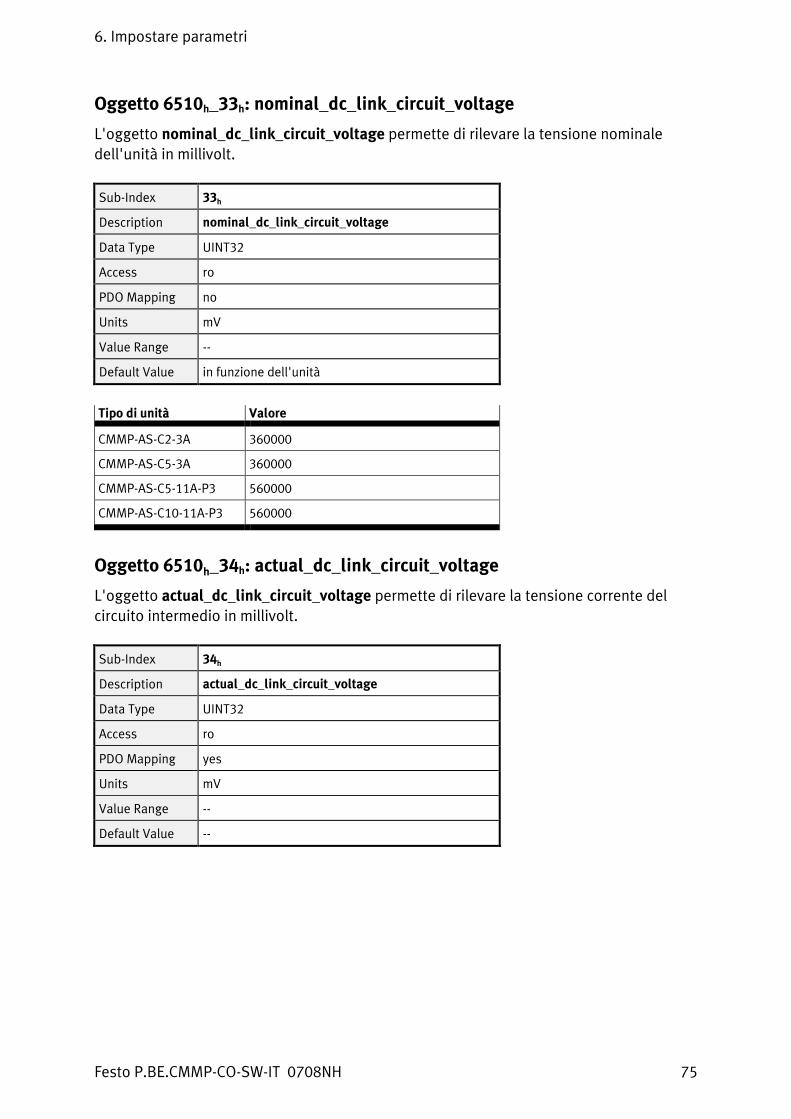
6. Impostare parametri
Festo P.BE.CMMP-CO-SW-IT 0708NH 75
Oggetto 6510h_33h: nominal_dc_link_circuit_voltage
L'oggetto nominal_dc_link_circuit_voltage permette di rilevare la tensione nominale
dell'unità in millivolt.
Sub-Index 33h
Description nominal_dc_link_circuit_voltage
Data Type UINT32
Access ro
PDO Mapping no
Units mV
Value Range --
Default Value in funzione dell'unità
Tipo di unità Valore
CMMP-AS-C2-3A 360000
CMMP-AS-C5-3A 360000
CMMP-AS-C5-11A-P3 560000
CMMP-AS-C10-11A-P3 560000
Oggetto 6510h_34h: actual_dc_link_circuit_voltage
L'oggetto actual_dc_link_circuit_voltage permette di rilevare la tensione corrente del
circuito intermedio in millivolt.
Sub-Index 34h
Description actual_dc_link_circuit_voltage
Data Type UINT32
Access ro
PDO Mapping yes
Units mV
Value Range --
Default Value --

6. Impostare parametri
76 Festo P.BE.CMMP-CO-SW-IT 0708NH
Oggetto 6510h_35h: max_dc_link_circuit_voltage
L'oggetto max_dc_link_circuit_voltage specifica da quale tensione del circuito
intermedio il modulo terminale viene disattivato immediatamente per motivi di sicurezza e
appare un messaggio di errore.
Sub-Index 35h
Description max_dc_link_circuit_voltage
Data Type UINT32
Access ro
PDO Mapping no
Units mV
Value Range --
Default Value in funzione dell'unità
Tipo di unità Valore
CMMP-AS-C2-3A 460000
CMMP-AS-C5-3A 460000
CMMP-AS-C5-11A-P3 800000
CMMP-AS-C10-11A-P3 800000
Oggetto 6510h_36h: min_dc_link_circuit_voltage
Il motorcontroller dispone di una unità di monitoraggio per la sottotensione, che può essere attivata tramite l'oggetto 6510h_37h (enable_dc_link_undervoltage_error). L'oggetto 6510h_36h (min_dc_link_circuit_voltage) specifica fino a quale tensione
inferiore del circuito intermedio il motorcontroller deve funzionare. Al di sotto di questa tensione appare l'errore E 02-0 se questo è stato attivato con l'oggetto successivo.
Sub-Index 36h
Description min_dc_link_circuit_voltage
Data Type UINT32
Access rw
PDO Mapping no
Units mV
Value Range 0…1000000
Default Value 0

6. Impostare parametri
Festo P.BE.CMMP-CO-SW-IT 0708NH 77
Oggetto 6510h_37h: enable_dc_link_undervoltage_error
Con l'oggetto enable_dc_link_undervoltage_error si può attivare l'unità di monitoraggio per la sottotensione. Nell'oggetto 6510h_36h (min_dc_link_circuit_voltage) specificare
fino a quale tensione inferiore del circuito intermedio il motorcontroller deve funzionare.
Sub-Index 37h
Description enable_dc_link_undervoltage_error
Data Type UINT16
Access rw
PDO Mapping no
Units --
Value Range 0, 1
Default Value 0
Valore Significato
0 errore sottotensione OFF (reazione AVVERTENZA)
1 errore sottotensione ON (reazione ABILITAZIONE
REGOLATORE OFF)
L'errore 02-0 viene attivato modificando la reazione all'errore. Le reazioni che determinano l'arresto dell'attuatore vengono restituite come ON, tutte le altre come OFF.
Vengono impostate le reazioni all'errore AVVERTENZA e ABILITAZIONE REGOLATORE OFF descrivendo rispettivamente con 0 e 1.
Vedi anche capitolo 6.18 ‚Gestione degli errori‛.
Oggetto 6510h_40h: nominal_current
L'oggetto nominal_current permette di rilevare la corrente nominale dell'unità.
Contemporaneamente si tratta del valore limite superiore che può essere scritto nell'oggetto 6075h (motor_rated_current).
Sub-Index 40h
Description nominal_current
Data Type UINT32
Access ro
PDO Mapping no
Units mA
Value Range --
Default Value in funzione dell'unità

6. Impostare parametri
78 Festo P.BE.CMMP-CO-SW-IT 0708NH
Tipo di unità Valore
CMMP-AS-C2-3A 2500
CMMP-AS-C5-3A 5000
CMMP-AS-C5-11A-P3 2500
CMMP-AS-C10-11A-P3 5000
In funzione del tempo ciclo del regolatore e della frequenza di clock del modulo terminale vengono visualizzati eventualmente altri valori in seguito alla riduzione delle prestazioni.
Oggetto 6510h_41h: peak_current
L'oggetto peak_current permette di rilevare la corrente di picco dell'unità.
Contemporaneamente si tratta del valore limite superiore che può essere scritto nell'oggetto 6073h (max_current).
Sub-Index 41h
Description peak_current
Data Type UINT32
Access ro
PDO Mapping no
Units mA
Value Range --
Default Value in funzione dell'unità
Tipo di unità Valore
CMMP-AS-C2-3A 5000
CMMP-AS-C5-3A 10000
CMMP-AS-C5-11A-P3 7500
CMMP-AS-C10-11A-P3 15000
In funzione del tempo ciclo del regolatore e della frequenza di clock del modulo terminale vengono visualizzati eventualmente altri valori in seguito alla riduzione delle prestazioni.

6. Impostare parametri
Festo P.BE.CMMP-CO-SW-IT 0708NH 79
6.5 Regolatore di corrente e adattamento del motore
Attenzione
Impostazioni errate dei parametri dei regolatori e limitatori di corrente possono danneggiare irreparabilmente il motore ed eventualmente anche il motorcontroller entro breve tempo!
6.5.1 Panoramica
Il set di parametri del motorcontroller deve essere adattato per il motore collegato e il set di cavi utilizzato. I parametri in oggetto sono i seguenti:
Corrente nominale in funzione del motore
Capacità di sovraccarico in funzione del motore
Numero di poli in funzione del motore
Regolatore di corrente in funzione del motore
Senso di rotazione in funzione del motore e della sequenza delle fasi nel cavo del motore e resolver
Angolo offset in funzione del motore e della sequenza delle fasi nel cavo del
motore e resolver
Definire questi dati con il software di parametrazione al momento di impiegare un tipo di motore per la prima volta. Il set di parametri sono registrati sul CD di installazione per la serie di motori EMMS-AS Festo. Altri set sono riportati su Internet all'indirizzo www.festo.com/download.
Tenere presente che senso di rotazione e angolo offset dipendono anche dal set di cavi utilizzato. Perciò i set di parametri funzionano solo se il cablaggio è identico.
Attenzione
Può verificarsi una autoeccitazione nel cavo del motore o resolver se la sequenza delle fasi è girata, in questo caso non è possibile regolare il numero di giri. Il motore può girare in modo incontrollato!
6.5.2 Descrizione degli oggetti
Index Oggetto Name Tipo Attr.
6075h VAR motor_rated_current UINT32 rw
6073h VAR max_current UINT16 rw
604Dh VAR pole_number UINT8 rw
6410h RECORD motor_data rw
60F6h RECORD torque_control_parameters rw

6. Impostare parametri
80 Festo P.BE.CMMP-CO-SW-IT 0708NH
Oggetti trattati in altri capitoli
Index Oggetto Name Tipo Capitolo
2415h RECORD current_limitation 6.8 Limitazione del valore nominale
Oggetto 6075h: motor_rated_current
Questo valore è riportato sulla targhetta di identificazione del motore e viene immesso nell'unità ‚milliampere‛. Viene assunto sempre il valore effettivo (RMS). Non è possibile prestabilire una corrente superiore alla corrente nominale del motorcontroller (6510h_40h:
nominal_current).
Index 6075h
Name motor_rated_current
Object Code VAR
Data Type UINT32
Access rw
PDO Mapping yes
Units mA
Value Range 0 … nominal_current
Default Value 296
Se l'oggetto 6075h (motor_rated_current) viene scritto con un nuovo valore, allora bisogna riparametrare anche l'oggetto 6073h (max_current).
Oggetto 6073h: max_current
In genere i servomotori possono essere sovraccaricati per un determinato periodo. Con questo oggetto viene impostata la corrente max. ammissibile del motore, che si riferisce alla corrente nominale (oggetto 6075h: motor_rated_current) e viene impostata in
millesimi. L'intervallo di valori viene limitato verso l'alto dalla corrente max. del controller (oggetto 6510h_41h: peak_current). Molti motori possono essere sovraccaricati
brevemente del fattore 2. In questo caso scrivere il valore 2000 in questo oggetto.
L'oggetto 6073h (max_current) può essere scritto solo se in precedenza è stato descritto correttamente l'oggetto 6075h (motor_rated_current).

6. Impostare parametri
Festo P.BE.CMMP-CO-SW-IT 0708NH 81
Index 6073h
Name max_current
Object Code VAR
Data Type UINT16
Access rw
PDO Mapping yes
Units per thousands of rated current
Value Range --
Default Value 2023
Oggetto 604Dh: pole_number
Il numero di poli del motore è riportato nel foglio dati o nel software di parametrazione. Il numero è sempre pari. Spesso viene specificata la coppia di poli invece del numero di poli. Perciò il numero di poli corrisponde alla coppia di poli doppia.
L'oggetto non viene modificato tramite restore_default_parameters.
Index 604Dh
Name pole_number
Object Code VAR
Data Type UINT8
Access rw
PDO Mapping yes
Units --
Value Range 2 … 254
Default Value 4 (secondo INIT!)
Oggetto 6410h_03h: iit_time_motor
In genere i servomotori possono essere sovraccaricati per un determinato periodo. Tramite questo oggetto viene specificato quanto tempo il motore collegato può essere alimentato con la corrente indicata nell'oggetto 6073h (max_current). Al termine del
tempo IIT la corrente viene limitata automaticamente al valore specificato nell'oggetto 6075h (motor_rated_current) per proteggere il motore. L'impostazione standard è di
2 secondi e vale per quasi tutti i motori.
Index 6410h
Name motor_data
Object Code RECORD
No. of Elements 5

6. Impostare parametri
82 Festo P.BE.CMMP-CO-SW-IT 0708NH
Sub-Index 03h
Description iit_time_motor
Data Type UINT16
Access rw
PDO Mapping no
Units ms
Value Range 0 … 10000
Default Value 2000
Oggetto 6410h_04h: iit_ratio_motor
L'oggetto iit_ratio_motor permette di rilevare il carico max. corrente della limitazione I2t in
millesimi.
Sub-Index 04h
Description iit_ratio_motor
Data Type UINT16
Access ro
PDO Mapping no
Units millesimi
Value Range --
Default Value --
Oggetto 6510h_38h: iit_error_enable
Tramite l'oggetto iit_error_enable viene definita la reazione del motorcontroller quando si verifica la limitazione I2t. Appare solo nello statusword o viene attivato l'errore E 31-0.
Index 6510h
Name drive_data
Object Code RECORD
No. of Elements 51
Sub-Index 38h
Description iit_error_enable
Data Type UINT16
Access rw
PDO Mapping no
Units --
Value Range 0, 1
Default Value 0

6. Impostare parametri
Festo P.BE.CMMP-CO-SW-IT 0708NH 83
Valore Significato
0 errore I2t OFF (priorità AVVERTENZA) (priorità AVVERTENZA)
1 errore I2t ON (priorità ABILITAZIONE REGOLATORE OFF) (priorità ABILITAZIONE REGOLATORE OFF)
L'errore 31-0 viene attivato modificando la reazione all'errore. Le reazioni che determinano l'arresto dell'attuatore vengono restituite come ON, tutte le altre come OFF.
Vengono impostate le reazioni all'errore AVVERTENZA e ABILITAZIONE REGOLATORE OFF descrivendo rispettivamente con 0 e 1. Vedi capitolo 6.18 ‚Gestione degli errori‛.
Oggetto 6410h_10h: phase_order
Nella sequenza di fase (phase_order) vengono contemplate le torsioni fra cavo del motore
e cavo del resolver. È riportata nel software di parametrazione. Uno zero e un uno corrispondono rispettivamente a ‚destra‛ e ‚sinistra‛.
Sub-Index 10h
Description phase_order
Data Type INT16
Access rw
PDO Mapping yes
Units --
Value Range 0, 1
Default Value 0
Valore Significato
0 destra
1 sinistra
Oggetto 6410h_11h: encoder_offset_angle
Nei servomotori utilizzati sono presenti dei magneti permanenti sul rotore, che generano un campo magnetico il cui orientamento allo statore dipende dalla posizione del rotore. Per la commutazione elettronica, il motorcontroller deve regolare il campo elettro- magnetico dello statore sempre nell'angolo corretto rispetto a questo campo magnetico permanente. A questo scopo determina continuamente la posizione del rotore con un resolver.
L'orientamento del resolver al campo magnetico permanente deve essere registrato nell'oggetto encoder_offset_angle. Questo angolo può essere determinato con il
software di parametrazione. L'angolo determinato con il software è nel campo di ±180°. Eseguire la conversione procedendo nel modo seguente:
encoder_offset_angle = “angolo offset del resolver” 32767
180°
L'oggetto non viene modificato tramite restore_default_parameters.

6. Impostare parametri
84 Festo P.BE.CMMP-CO-SW-IT 0708NH
Index 6410h
Name motor_data
Object Code RECORD
No. of Elements 5
Sub-Index 11h
Description encoder_offset_angle
Data Type INT16
Access rw
PDO Mapping yes
Units …
Value Range -32767 … 32767
Default Value E000h (-45°) (secondo INIT!)
Oggetto 6410h_14h: motor_temperature_sensor_polarity
Questo oggetto permette di definire se utilizzare un contatto normalmente chiuso o un contatto normalmente aperto in funzione di sensore termico digitale del motore.
Sub-Index 14h
Description motor_temperatur_sensor_polarity
Data Type INT16
Access rw
PDO Mapping yes
Units --
Value Range 0, 1
Default Value 0
Valore Significato
0 contatto n.c.
1 contatto n.a.

6. Impostare parametri
Festo P.BE.CMMP-CO-SW-IT 0708NH 85
Oggetto 6510h _2Eh: motor_temperature
Questo oggetto permette di leggere la temperatura corrente del motore se è collegato un sensore termico analogico. In caso contrario l'oggetto è indefinito.
Index 6510h
Name drive_data
Object Code RECORD
No. of Elements 51
Sub-Index 2Eh
Description motor_temperature
Data Type INT16
Access ro
PDO Mapping yes
Units °C
Value Range --
Default Value --
Oggetto 6510h_2Fh: max_motor_temperature
Avviene una reazione secondo la gestione degli errori (errore 3-0, sovratemperatura motore analogico) se la temperatura del motore definita in questo oggetto viene superata. Viene trasmesso un messaggio Emergency se è parametrata una reazione che determina l'arresto dell'attuatore.
Per la parametrazione della gestione errori vedi capitolo 0.
Sub-Index 2Fh
Description max_motor_temperature
Data Type INT16
Access rw
PDO Mapping no
Units °C
Value Range 20 … 300
Default Value 100
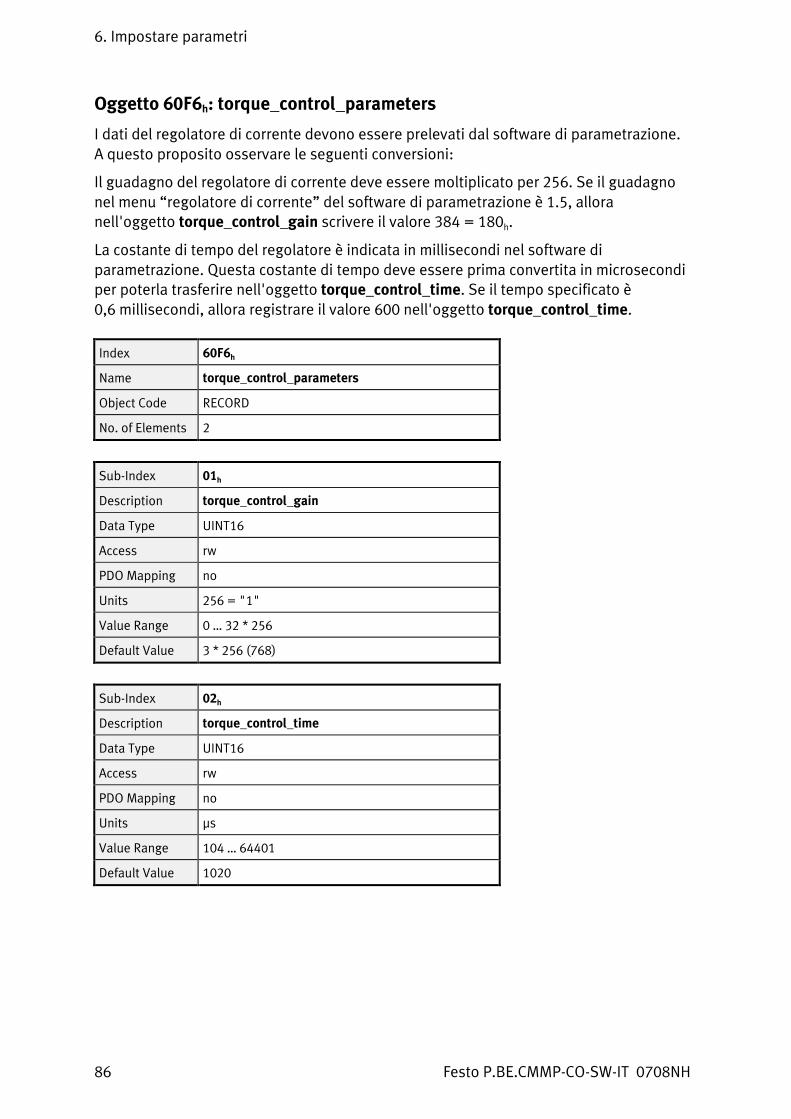
6. Impostare parametri
86 Festo P.BE.CMMP-CO-SW-IT 0708NH
Oggetto 60F6h: torque_control_parameters
I dati del regolatore di corrente devono essere prelevati dal software di parametrazione. A questo proposito osservare le seguenti conversioni:
Il guadagno del regolatore di corrente deve essere moltiplicato per 256. Se il guadagno nel menu ‚regolatore di corrente‛ del software di parametrazione è 1.5, allora nell'oggetto torque_control_gain scrivere il valore 384 = 180h.
La costante di tempo del regolatore è indicata in millisecondi nel software di parametrazione. Questa costante di tempo deve essere prima convertita in microsecondi per poterla trasferire nell'oggetto torque_control_time. Se il tempo specificato è 0,6 millisecondi, allora registrare il valore 600 nell'oggetto torque_control_time.
Index 60F6h
Name torque_control_parameters
Object Code RECORD
No. of Elements 2
Sub-Index 01h
Description torque_control_gain
Data Type UINT16
Access rw
PDO Mapping no
Units 256 = "1"
Value Range 0 … 32 * 256
Default Value 3 * 256 (768)
Sub-Index 02h
Description torque_control_time
Data Type UINT16
Access rw
PDO Mapping no
Units µs
Value Range 104 … 64401
Default Value 1020
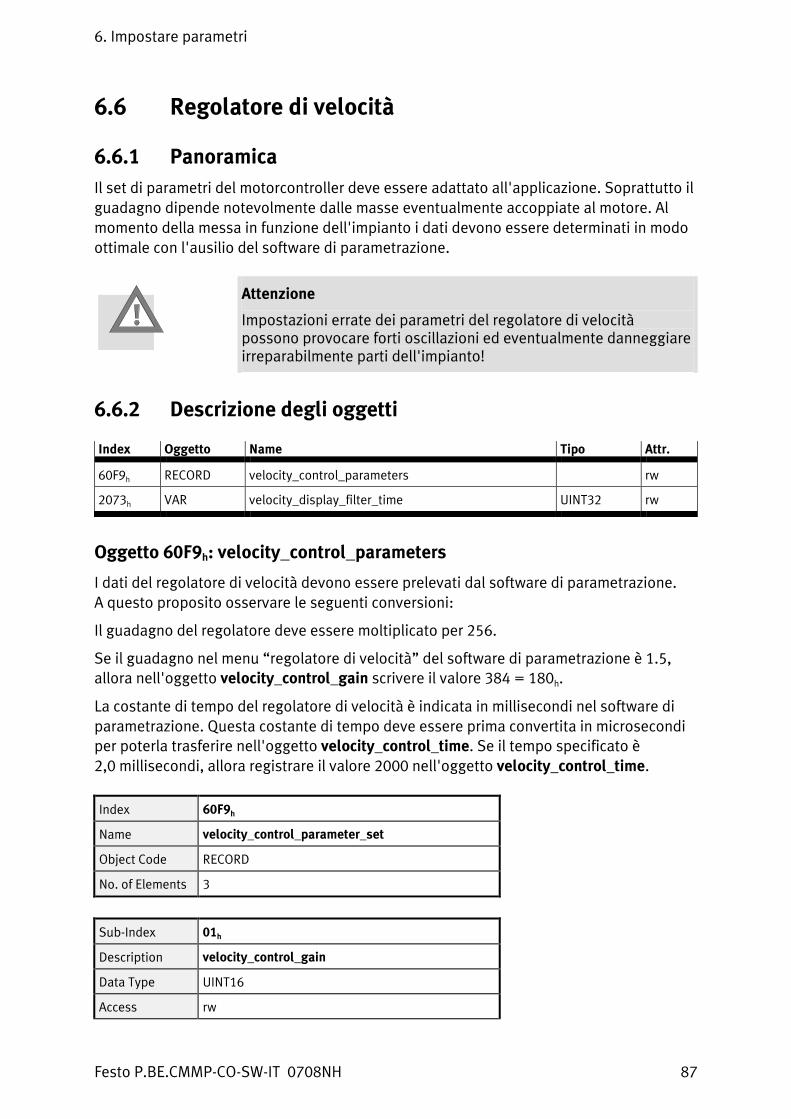
6. Impostare parametri
Festo P.BE.CMMP-CO-SW-IT 0708NH 87
6.6 Regolatore di velocità
6.6.1 Panoramica
Il set di parametri del motorcontroller deve essere adattato all'applicazione. Soprattutto il guadagno dipende notevolmente dalle masse eventualmente accoppiate al motore. Al momento della messa in funzione dell'impianto i dati devono essere determinati in modo ottimale con l'ausilio del software di parametrazione.
Attenzione
Impostazioni errate dei parametri del regolatore di velocità possono provocare forti oscillazioni ed eventualmente danneggiare irreparabilmente parti dell'impianto!
6.6.2 Descrizione degli oggetti
Index Oggetto Name Tipo Attr.
60F9h RECORD velocity_control_parameters rw
2073h VAR velocity_display_filter_time UINT32 rw
Oggetto 60F9h: velocity_control_parameters
I dati del regolatore di velocità devono essere prelevati dal software di parametrazione. A questo proposito osservare le seguenti conversioni:
Il guadagno del regolatore deve essere moltiplicato per 256.
Se il guadagno nel menu ‚regolatore di velocità‛ del software di parametrazione è 1.5, allora nell'oggetto velocity_control_gain scrivere il valore 384 = 180h.
La costante di tempo del regolatore di velocità è indicata in millisecondi nel software di parametrazione. Questa costante di tempo deve essere prima convertita in microsecondi per poterla trasferire nell'oggetto velocity_control_time. Se il tempo specificato è 2,0 millisecondi, allora registrare il valore 2000 nell'oggetto velocity_control_time.
Index 60F9h
Name velocity_control_parameter_set
Object Code RECORD
No. of Elements 3
Sub-Index 01h
Description velocity_control_gain
Data Type UINT16
Access rw
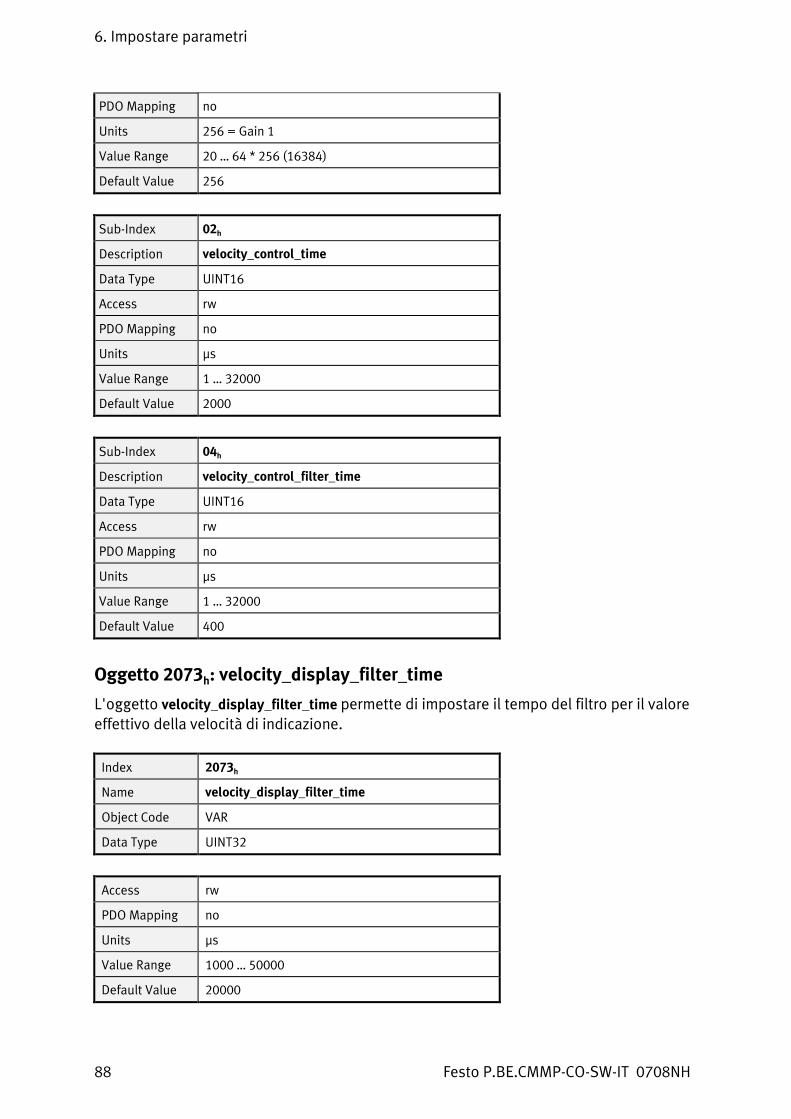
6. Impostare parametri
88 Festo P.BE.CMMP-CO-SW-IT 0708NH
PDO Mapping no
Units 256 = Gain 1
Value Range 20 … 64 * 256 (16384)
Default Value 256
Sub-Index 02h
Description velocity_control_time
Data Type UINT16
Access rw
PDO Mapping no
Units µs
Value Range 1 … 32000
Default Value 2000
Sub-Index 04h
Description velocity_control_filter_time
Data Type UINT16
Access rw
PDO Mapping no
Units µs
Value Range 1 … 32000
Default Value 400
Oggetto 2073h: velocity_display_filter_time
L'oggetto velocity_display_filter_time permette di impostare il tempo del filtro per il valore effettivo della velocità di indicazione.
Index 2073h
Name velocity_display_filter_time
Object Code VAR
Data Type UINT32
Access rw
PDO Mapping no
Units μs
Value Range 1000 … 50000
Default Value 20000

6. Impostare parametri
Festo P.BE.CMMP-CO-SW-IT 0708NH 89
Tenere presente che l'oggetto velocity_actual_value_filtered viene utilizzato per la protezione contro la rotazione. Se il tempo del filtro è eccessivo, l'errore di rotazione viene identificato solo al momento della decelerazione.
6.7 Regolatore di posizione (Position Control Function)
6.7.1 Panoramica
In questo capitolo vengono descritti tutti i parametri che sono necessari per il regolatore di posizione. Sull'ingresso del regolatore è presente il valore nominale della posizione (position_demand_value) del generatore di curve di traslazione. Inoltre il valore effettivo della posizione (position_actual_value) viene introdotto dal trasduttore angolare
(resolver, trasduttore incrementale ecc.). Il comportamento del regolatore può essere condizionato impostando dei parametri. È possibile limitare la grandezza di uscita (control_effort) per poter mantenere stabile il circuito di regolazione della posizione. La
grandezza di uscita viene introdotta nel regolatore di velocità come valore nominale del numero di giri. Nel Factor Group tutte le grandezze d'ingresso e di uscita vengono
convertite dalle unità specifiche dell'applicazione nelle rispettive unità interne del regolatore.
In questo capitolo sono definite le seguenti sottofunzioni:
1. Errore di posizionamento (Following_Error) L'errore di posizionamento è lo scostamento del valore effettivo (position_actual_
value) dal valore nominale (position_demand_value). Se per un determinato spazio di
tempo questo errore di posizionamento è maggiore di quanto indicato nella finestra (following_error_window), allora il bit 13 following_error viene impostato nell'oggetto statusword. Lo spazio di tempo ammissibile può essere prestabilito tramite l'oggetto following_error_time_out.
1
following_error_window(6065
h)
0
-following_error_window(6065
h)
following_error_time_out(6066
h)
statusword, Bit 13 (6041h)
time
position_difference = position_demand_value (6062 ) - position_actual_value (6064 )
h h
t
t
t
Fig. 6.4: Errore di posizionamento – Prospetto delle funzioni

6. Impostare parametri
90 Festo P.BE.CMMP-CO-SW-IT 0708NH
La Fig. 6.5 mostra come è definita la funzione della finestra per il messaggio ‚errore di posizionamento‛. Simmetricamente attorno alla posizione nominale (position_demand_value) xi è definito il campo fra xi-x0 e xi+x0. Le posizioni xt2 e xt3
sono ad es. al di fuori di questa finestra (following_error_window). Se l'attuatore esce da questa finestra e non ritorna nel tempo prestabilito nell'oggetto following_error_
time_out, allora il bit 13 following_error viene impostato nello statusword.
Fig. 6.5: Errore di posizionamento
2. Posizione raggiunta (Position Reached)
Questa funzione permette di definire una finestra di posizione attorno alla posizione di arrivo (target_position). Se la posizione effettiva dell'attuatore è in questo campo per un determinato periodo di tempo – position_window_time –, allora il relativo bit 10 (target_reached) viene impostato nell'oggetto statusword.
1
position_window(6067
h)
0
- position_window(6067
h)
position_window_time(6068
h)
statusword, Bit 10 (6041h)
time
position_difference = position_demand_value (6062 ) - position_actual_value (6064 )
h h
Fig. 6.6: Posizione raggiunta – Prospetto delle funzioni
La Fig. 6.7 mostra come è definita la funzione della finestra per il messaggio ‚posizione raggiunta‛. Simmetricamente attorno alla posizione di arrivo (target_position) xi è
definito il campo di posizione fra xi-x0 e xi+x0. Le posizioni xt0 e xt1 sono ad es. dentro
questa finestra (position_window). Se l'attuatore è in questa finestra, allora viene avviato un timer nel motorcontroller. Se questo timer raggiunge il tempo prestabilito nell'oggetto
position_window_time e durante questo periodo l'attuatore è ininterrottamente nel campo valido fra xi-x0 e xi+x0, allora il bit 10 target_reached viene impostato nello
statusword. Il bit 10 ed anche il timer vengono azzerati non appena l'attuatore esce dal
campo ammissibile.

6. Impostare parametri
Festo P.BE.CMMP-CO-SW-IT 0708NH 91
Fig. 6.7: Posizione raggiunta
6.7.2 Descrizione degli oggetti
Oggetti trattati in questo capitolo
Index Oggetto Name Tipo Attr.
202Dh VAR position_demand_sync_value INT32 ro
2030h VAR set_position_absolute INT32 wo
6062h VAR position_demand_value INT32 ro
6063h VAR position_actual_value* INT32 ro
6064h VAR position_actual_value INT32 ro
6065h VAR following_error_window UINT32 rw
6066h VAR following_error_time_out UINT16 rw
6067h VAR position_window UINT32 rw
6068h VAR position_window_time UINT16 rw
607Bh ARRAY position_range_limit INT32 rw
60FAh VAR control_effort INT32 ro
60FBh RECORD position_control_parameter_set rw
60FCh VAR position_demand_value* INT32 ro
6510h_20h VAR position_range_limit_enable UINT16 rw
6510h_22h VAR position_error_switch_off_limit UINT32 rw
Oggetti trattati in altri capitoli
Index Oggetto Name Tipo Capitolo
607Ah VAR target_position INT32 1.1 Modo operativo posizionamento
607Ch VAR home_offset INT32 8.2 Corsa di riferimento
607Dh VAR software_position_limit INT32 1.1 Modo operativo posizionamento
607Eh VAR polarity UINT8 0 Fattori di conversione
6093h VAR position_factor UINT32 0 Fattori di conversione
6094h ARRAY velocity_encoder_factor UINT32 0 Fattori di conversione

6. Impostare parametri
92 Festo P.BE.CMMP-CO-SW-IT 0708NH
Index Oggetto Name Tipo Capitolo
6096h ARRAY acceleration_factor UINT32 0 Fattori di conversione
6040h VAR controlword INT16 7.1.3 Controlword (parola di comando)
6041h VAR statusword UINT16 7.1.5 Statusword (parola di stato)
Oggetto 60FBh: position_control_parameter_set
Il set di parametri del motorcontroller deve essere adattato all'applicazione. Al momento della messa in funzione dell'impianto i dati del regolatore di posizione devono essere determinati in modo ottimale con l'ausilio del software di parametrazione.
Attenzione
Impostazioni errate dei parametri del regolatore di posizione possono provocare forti oscillazioni ed eventualmente danneggiare irreparabilmente parti dell'impianto!
Il regolatore confronta la posizione nominale con la posizione effettiva e dalla differenza forma una velocità di correzione contemplando il guadagno ed eventualmente l'integratore (oggetto 60FAh: control_effort). La velocità di correzione viene introdotta nel
regolatore di velocità. Il regolatore di posizione è relativamente lento rispetto al
regolatore di corrente e di velocità. Perciò funziona internamente con modulatori, cosicché il lavoro di stabilizzazione viene ridotto e quindi è in grado di pendolare rapidamente.
In genere come regolatore di posizione è sufficiente un elemento proporzionale. Il guadagno del regolatore deve essere moltiplicato per 256. Se il guadagno nel menu ‚regolatore di posizione‛ del software di parametrazione è 1.5, allora nell'oggetto position_control_gain scrivere il valore 384.
In genere non è necessario l'integratore per il regolatore. Poi scrivere il valore ‚zero‛ nell'oggetto position_control_time. Altrimenti bisogna convertire la costante di tempo in
microsecondi. Se il tempo specificato è 4,0 millisecondi, allora registrare il valore 4000 nell'oggetto position_control_time.
Il regolatore converte in velocità di correzione significative anche le variazioni di posizione minime, quindi in caso di una piccola anomalia (ad es. breve bloccaggio dell'impianto) potrebbero verificarsi processi di stabilizzazione troppo intensi con velocità molto elevate. Tutto ciò deve essere evitato se l'uscita del regolatore viene limitata appropriatamente tramite l'oggetto position_control_v_max (ad es. 500 min-1).
Con l'oggetto position_error_tolerance_window si può definire la grandezza della
differenza di posizione entro cui il regolatore non interviene (campo morto). L'oggetto può essere impiegato per la stabilizzazione se nell'impianto è ad esempio disponibile dello spazio.
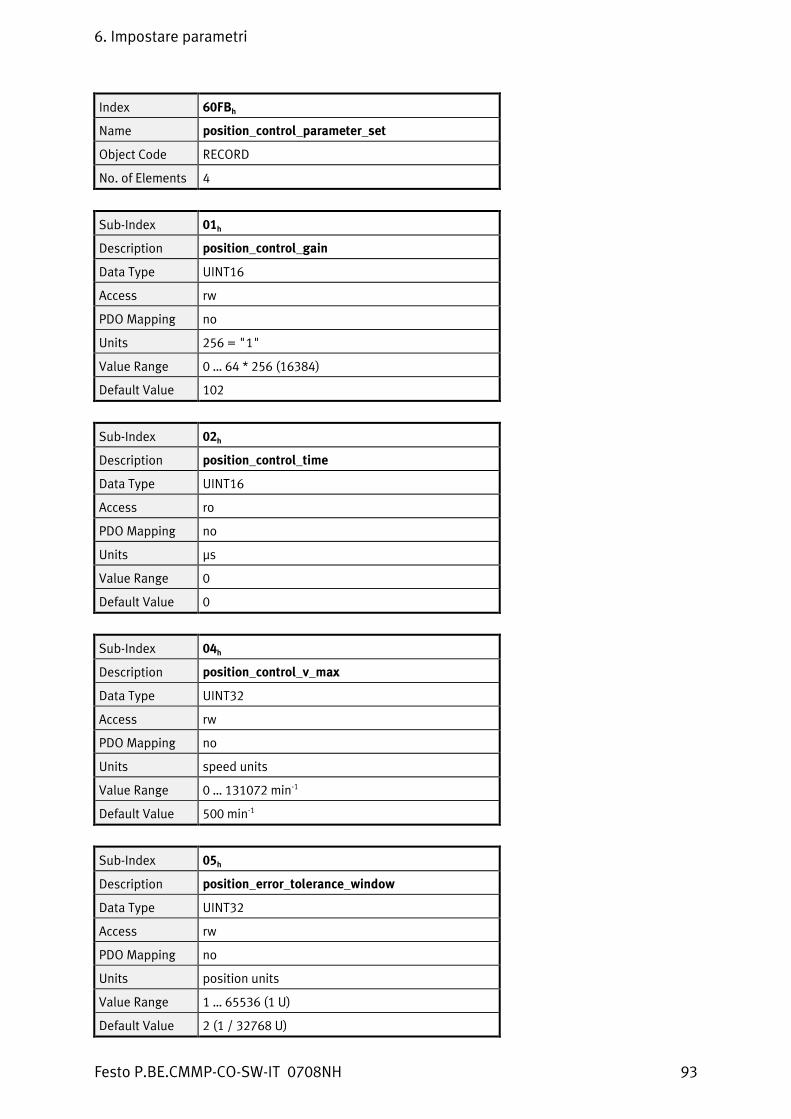
6. Impostare parametri
Festo P.BE.CMMP-CO-SW-IT 0708NH 93
Index 60FBh
Name position_control_parameter_set
Object Code RECORD
No. of Elements 4
Sub-Index 01h
Description position_control_gain
Data Type UINT16
Access rw
PDO Mapping no
Units 256 = "1"
Value Range 0 … 64 * 256 (16384)
Default Value 102
Sub-Index 02h
Description position_control_time
Data Type UINT16
Access ro
PDO Mapping no
Units µs
Value Range 0
Default Value 0
Sub-Index 04h
Description position_control_v_max
Data Type UINT32
Access rw
PDO Mapping no
Units speed units
Value Range 0 … 131072 min-1
Default Value 500 min-1
Sub-Index 05h
Description position_error_tolerance_window
Data Type UINT32
Access rw
PDO Mapping no
Units position units
Value Range 1 … 65536 (1 U)
Default Value 2 (1 / 32768 U)

6. Impostare parametri
94 Festo P.BE.CMMP-CO-SW-IT 0708NH
Oggetto 6062h: position_demand_value
Questo oggetto permette di leggere il valore nominale corrente della posizione. Questa posizione viene immessa nel regolatore dal generatore di curve di traslazione.
Index 6062h
Name position_demand_value
Object Code VAR
Data Type INT32
Access ro
PDO Mapping yes
Units position units
Value Range --
Default Value --
Oggetto 202Dh: position_demand_sync_value
Questo oggetto permette di leggere la posizione nominale dell'encoder di sincronizza- zione, che viene definita tramite l'oggetto 2022h synchronization_encoder_select
(vedi capitolo 0). Questo oggetto viene specificato in unità definite dall'utente.
Index 202Dh
Name position_demand_sync_value
Object Code VAR
Data Type INT32
Access ro
PDO Mapping no
Units position units
Value Range --
Default Value --
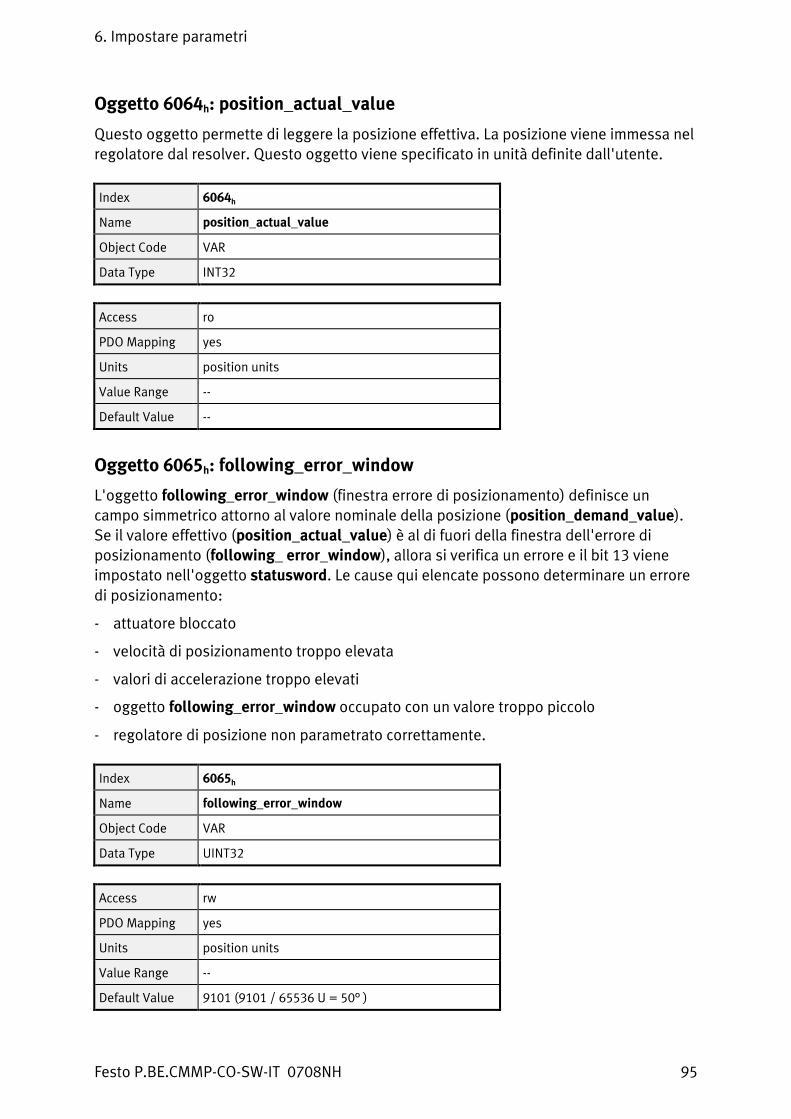
6. Impostare parametri
Festo P.BE.CMMP-CO-SW-IT 0708NH 95
Oggetto 6064h: position_actual_value
Questo oggetto permette di leggere la posizione effettiva. La posizione viene immessa nel regolatore dal resolver. Questo oggetto viene specificato in unità definite dall'utente.
Index 6064h
Name position_actual_value
Object Code VAR
Data Type INT32
Access ro
PDO Mapping yes
Units position units
Value Range --
Default Value --
Oggetto 6065h: following_error_window
L'oggetto following_error_window (finestra errore di posizionamento) definisce un campo simmetrico attorno al valore nominale della posizione (position_demand_value).
Se il valore effettivo (position_actual_value) è al di fuori della finestra dell'errore di posizionamento (following_ error_window), allora si verifica un errore e il bit 13 viene impostato nell'oggetto statusword. Le cause qui elencate possono determinare un errore
di posizionamento:
- attuatore bloccato
- velocità di posizionamento troppo elevata
- valori di accelerazione troppo elevati
- oggetto following_error_window occupato con un valore troppo piccolo
- regolatore di posizione non parametrato correttamente.
Index 6065h
Name following_error_window
Object Code VAR
Data Type UINT32
Access rw
PDO Mapping yes
Units position units
Value Range --
Default Value 9101 (9101 / 65536 U = 50° )

6. Impostare parametri
96 Festo P.BE.CMMP-CO-SW-IT 0708NH
Oggetto 6066h: following_error_time_out
Se si verifica un errore di posizionamento più lungo di quello definito in questo oggetto, il relativo bit 13 following_error viene impostato nello statusword.
Index 6066h
Name following_error_time_out
Object Code VAR
Data Type UINT16
Access rw
PDO Mapping yes
Units ms
Value Range 0 … 27314
Default Value 0
Oggetto 60FAh: control_effort
La grandezza di uscita del regolatore di posizione può essere letta tramite questo oggetto. Questo valore viene introdotto internamente nel regolatore di velocità come valore
nominale.
Index 60FAh
Name control_effort
Object Code VAR
Data Type INT32
Access ro
PDO Mapping yes
Units speed units
Value Range --
Default Value --

6. Impostare parametri
Festo P.BE.CMMP-CO-SW-IT 0708NH 97
Oggetto 6067h: position_window
Con l'oggetto position_window viene definito un campo simmetrico attorno alla posizione di arrivo (target_position). La posizione di arrivo (target_position) è raggiunta se il valore
effettivo (position_actual_value) è entro questo campo per un determinato tempo.
Index 6067h
Name position_window
Object Code VAR
Data Type UINT32
Access rw
PDO Mapping yes
Units position units
Value Range --
Default Value 1820 (1820 / 65536 U = 10° )
Oggetto 6068h: position_window_time
Se la posizione effettiva dell'attuatore è all'interno della finestra (position_window), cioè
per il tempo come definito in questo oggetto, allora il relativo bit 10 target_reached viene impostato nello statusword.
Index 6068h
Name position_window_time
Object Code VAR
Data Type UINT16
Access rw
PDO Mapping yes
Units ms
Value Range --
Default Value 0
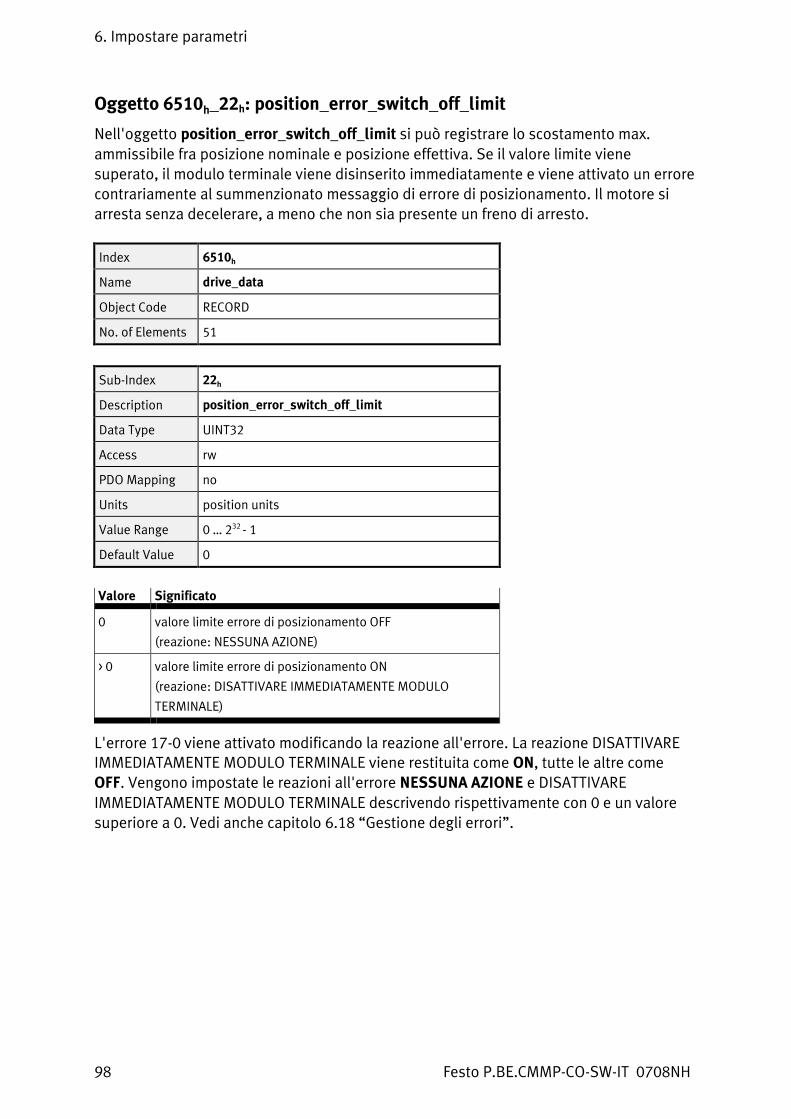
6. Impostare parametri
98 Festo P.BE.CMMP-CO-SW-IT 0708NH
Oggetto 6510h_22h: position_error_switch_off_limit
Nell'oggetto position_error_switch_off_limit si può registrare lo scostamento max.
ammissibile fra posizione nominale e posizione effettiva. Se il valore limite viene
superato, il modulo terminale viene disinserito immediatamente e viene attivato un errore contrariamente al summenzionato messaggio di errore di posizionamento. Il motore si arresta senza decelerare, a meno che non sia presente un freno di arresto.
Index 6510h
Name drive_data
Object Code RECORD
No. of Elements 51
Sub-Index 22h
Description position_error_switch_off_limit
Data Type UINT32
Access rw
PDO Mapping no
Units position units
Value Range 0 … 232 - 1
Default Value 0
Valore Significato
0 valore limite errore di posizionamento OFF
(reazione: NESSUNA AZIONE)
> 0 valore limite errore di posizionamento ON
(reazione: DISATTIVARE IMMEDIATAMENTE MODULO
TERMINALE)
L'errore 17-0 viene attivato modificando la reazione all'errore. La reazione DISATTIVARE IMMEDIATAMENTE MODULO TERMINALE viene restituita come ON, tutte le altre come OFF. Vengono impostate le reazioni all'errore NESSUNA AZIONE e DISATTIVARE
IMMEDIATAMENTE MODULO TERMINALE descrivendo rispettivamente con 0 e un valore superiore a 0. Vedi anche capitolo 6.18 ‚Gestione degli errori‛.

6. Impostare parametri
Festo P.BE.CMMP-CO-SW-IT 0708NH 99
Oggetto 607Bh: position_range_limit
Il gruppo di oggetti position_range_limit contiene due sottoparametri che limitano il
campo numerico dei valori di posizione. Superando uno di questi limiti, il valore di
posizione salta automaticamente nell'altro limite. Ciò permette di parametrare i cosiddetti assi rotanti. Perciò bisogna specificare i limiti che fisicamente devono corrispondere alla medesima posizione, ad es. 0° e 360°.
Per attivare questi limiti, selezionare un modo dell'asse rotante tramite l'oggetto 6510h_20h (position_range_limit_enable).
Index 607Bh
Name position_range_limit
Object Code ARRAY
No. of Elements 2
Data Type INT32
Sub-Index 01h
Description min_position_range_limit
Access rw
PDO Mapping yes
Units position units
Value Range ..
Default Value --
Sub-Index 02h
Description max_position_range_limit
Access rw
PDO Mapping yes
Units position units
Value Range ..
Default Value ..

6. Impostare parametri
100 Festo P.BE.CMMP-CO-SW-IT 0708NH
Oggetto 6510h_20h: position_range_limit_enable
L'oggetto position_range_limit_enable permette di attivare i limiti di campo definiti tramite l'oggetto 607Bh. Sono possibili diversi modi.
Selezionando il modo ‚corsa più breve‛, i posizionamenti verso la destinazione vengono eseguiti sempre sul percorso più breve. L'attuatore adatta automaticamente il segno aritmetico della velocità di traslazione. Nei due modi ‚senso di rotazione fisso‛ il posizionamento viene eseguito solo nella direzione specificata nel modo.
Index 6510h
Name drive_data
Object Code RECORD
No. of Elements 51
Sub-Index 20h
Description position_range_limit_enable
Data Type UINT16
Access rw
PDO Mapping no
Units --
Value Range 0 … 5
Default Value 0
Valore Significato
0 Spento
1 corsa più breve (per motivi di compatibilità)
2 corsa più breve
3 riservato
4 senso di rotazione fisso "positivo"
5 senso di rotazione fisso "negativo"

6. Impostare parametri
Festo P.BE.CMMP-CO-SW-IT 0708NH 101
Oggetto 2030h: set_position_absolute
L'oggetto set_position_absolute permette di spostare la posizione effettiva rilevabile
senza che cambi la posizione fisica. L'attuatore non esegue alcun movimento.
Se è collegato un sistema assoluto, lo spostamento della posizione viene memorizzato nell'encoder purché il sistema permetta la registrazione. In questo caso lo spostamento della posizione resta immutato anche dopo un reset. L'operazione di memorizzazione si svolge in background indipendentemente da questo oggetto. Vengono memorizzati anche i parametri con i valori correnti.
Index 2030h
Name set_position_ absolute
Object Code VAR
Data Type INT32
Access wo
PDO Mapping no
Units position units
Value Range --
Default Value --
6.8 Limitazione del valore nominale
6.8.1 Descrizione degli oggetti
Oggetti trattati in questo capitolo
Index Oggetto Name Tipo Attr.
2415h RECORD current_limitation rw
2416h RECORD speed_limitation rw
Oggetto 2415h: current_limitation
Con il gruppo di oggetti current_limitation si può limitare la corrente massima per il
motore nei modi operativi profile_position_mode, interpolated_position_mode, homing_mode e velocity_mode, per cui ad esempio è possibile realizzare un regime di velocità a coppia limitata. L'origine del valore nominale della coppia di limitazione viene prestabilito tramite l'oggetto limit_current_input_channel. In questo caso si può
scegliere fra l'impostazione di un valore nominale diretto (valore fisso) o l'impostazione tramite un ingresso analogico. Tramite l'oggetto limit_current vengono prestabiliti, in
funzione dell'origine scelta, la coppia di limitazione (origine = valore fisso) o il fattore di scalatura per gli ingressi analogici (origine = ingresso analogico).

6. Impostare parametri
102 Festo P.BE.CMMP-CO-SW-IT 0708NH
Nel primo caso la limitazione avviene direttamente sulla corrente in mA proporzionale alla coppia, nel secondo caso la corrente viene specificata in mA, che deve corrispondere ad una tensione applicata di 10 V.
Index 2415h
Name current_limitation
Object Code RECORD
No. of Elements 2
Sub-Index 01h
Description limit_current_input_channel
Data Type UINT8
Access rw
PDO Mapping no
Units --
Value Range 0 … 4
Default Value 0
Sub-Index 02h
Description limit_current
Data Type INT32
Access rw
PDO Mapping no
Units mA
Value Range --
Default Value 0
Valore Significato
0 nessuna limitazione
1 AIN0
2 AIN1
3 AIN2
4 fieldbus (selettore B)

6. Impostare parametri
Festo P.BE.CMMP-CO-SW-IT 0708NH 103
Oggetto 2416h: speed_limitation
Con il gruppo di oggetti speed_limitation si può limitare la velocità max. del motore nel
modo operativo profile_torque_mode, per cui è possibile realizzare un regime di coppia a
velocità limitata.. L'origine del valore nominale della velocità di limitazione viene prestabilita tramite l'oggetto limit_speed_input_channel. In questo caso si può scegliere
fra l'impostazione di un valore nominale diretto (fisso) o l'impostazione tramite un ingresso analogico. Tramite l'oggetto limit_speed vengono prestabiliti, in funzione
dell'origine scelta, la velocità di limitazione (valore fisso) o il fattore di scalatura per gli ingressi analogici (origine = ingresso analogico). Nel primo caso la limitazione avviene direttamente sulla velocità specificata, nel secondo caso viene specificata la velocità che deve corrispondere ad una tensione applicata di 10 V.
Index 2416h
Name speed_limitation
Object Code RECORD
No. of Elements 2
Sub-Index 01h
Description limit_speed_input_channel
Data Type UINT8
Access rw
PDO Mapping no
Units --
Value Range 0 … 4
Default Value 0
Sub-Index 02h
Description limit_speed
Data Type INT32
Access rw
PDO Mapping no
Units speed units
Value Range --
Default Value --
Valore Significato
0 nessuna limitazione
1 AIN0
2 AIN1
3 AIN2
4 fieldbus (selettore B)

6. Impostare parametri
104 Festo P.BE.CMMP-CO-SW-IT 0708NH
6.9 Adattamenti dell'encoder
6.9.1 Panoramica
Questo capitolo descrive la configurazione dell'ingresso del resolver X2A, X2B e dell'ingresso incrementale X10.
Attenzione
L'attuatore può girare in modo incontrollato e parti dell'impianto possono essere danneggiate irreparabilmente se le impostazioni del resolver sono errate.
6.9.2 Descrizione degli oggetti
Oggetti trattati in questo capitolo
Index Oggetto Name Tipo Attr.
2024h RECORD encoder_x2a_data_field ro
2024h_01h VAR encoder_x2a_resolution UINT32 ro
2024h_02h VAR encoder_x2a_numerator INT16 rw
2024h_03h VAR encoder_x2a_divisor INT16 rw
2025h RECORD encoder_x10_data_field ro
2025h_01h VAR encoder_x10_resolution UINT32 rw
2025h_02h VAR encoder_x10_numerator INT16 rw
2025h_03h VAR encoder_x10_divisor INT16 rw
2025h_04h VAR encoder_x10_counter UINT32 ro
2026h RECORD encoder_x2b_data_field ro
2026h_01h VAR encoder_x2b_resolution UINT32 rw
2026h_02h VAR encoder_x2b_numerator INT16 rw
2026h_03h VAR encoder_x2b_divisor INT16 rw
2026h_04h VAR encoder_x2b_counter UINT32 ro
Oggetto 2024h: encoder_x2a_data_field
Nel record encoder_x2a_data_field sono raggruppati dei parametri che sono necessari
per il funzionamento del resolver sul connettore X2A.
Numerose impostazioni del resolver vengono attivate solo dopo un reset, perciò è opportuno selezionare e impostare gli encoder tramite il software di parametrazione. Sotto CANopen è possibile leggere o modificare le seguenti impostazioni:

6. Impostare parametri
Festo P.BE.CMMP-CO-SW-IT 0708NH 105
L'oggetto encoder_x2a_resolution specifica quanti incrementi vengono generati dall'-
encoder per ogni giro o unità di lunghezza. In questo caso viene restituito sempre 65536 in quanto sull'ingresso X2A vengono collegati solo resolver che vengono analizzati con 16 bit. Con gli oggetti encoder_x2a_numerator e encoder_x2a_divisor si può contemplare
un eventuale riduttore (anche con segno aritmetico) fra albero motore ed encoder.
Index 2024h
Name encoder_x2a_data_field
Object Code RECORD
No. of Elements 3
Sub-Index 01h
Description encoder_x2a_resolution
Data Type UINT32
Access ro
PDO Mapping no
Units incrementi (4 * numero a trattino)
Value Range --
Default Value 65536
Sub-Index 02h
Description encoder_x2a_numerator
Data Type INT16
Access rw
PDO Mapping no
Units --
Value Range -32768 … 32767 (eccetto 0)
Default Value 1
Sub-Index 03h
Description encoder_x2a_divisor
Data Type INT16
Access rw
PDO Mapping no
Units --
Value Range 1 … 32767
Default Value 1

6. Impostare parametri
106 Festo P.BE.CMMP-CO-SW-IT 0708NH
Oggetto 2026h: encoder_x2b_data_field
Nel record encoder_x2b_data_field sono raggruppati dei parametri che sono necessari
per il funzionamento del resolver sul connettore X2B.
L'oggetto encoder_x2b_resolution specifica quanti incrementi vengono generati
dall'encoder per ogni giro (negli encoder incrementali ciò corrisponde al quadruplo del numero e virgola o dei periodi/giro).
L'oggetto encoder_x2b_counter fornisce il numero di incrementi contati. Perciò fornisce
valori fra 0 e il numero di incrementi impostati -1.
Con gli oggetti encoder_x2b_numerator e encoder_x2b_divisor si può contemplare un
riduttore fra albero motore e l'encoder collegato su X2b.
Index 2026h
Name encoder_x2b_data_field
Object Code RECORD
No. of Elements 4
Sub-Index 01h
Description encoder_x2b_resolution
Data Type UINT32
Access rw
PDO Mapping no
Units incrementi (4 * numero a trattino)
Value Range dipende dall'encoder utilizzato
Default Value dipende dall'encoder utilizzato
Sub-Index 02h
Description encoder_x2b_numerator
Data Type INT16
Access rw
PDO Mapping no
Units --
Value Range -32768 … 32767
Default Value 1

6. Impostare parametri
Festo P.BE.CMMP-CO-SW-IT 0708NH 107
Sub-Index 03h
Description encoder_x2b_divisor
Data Type INT16
Access rw
PDO Mapping no
Units --
Value Range 1 … 32767
Default Value 1
Sub-Index 04h
Description encoder_x2b_counter
Data Type UINT32
Access ro
PDO Mapping yes
Units incrementi (4 * numero a trattino)
Value Range 0 … (encoder_x2b_resolution - 1)
Default Value --
Oggetto 2025h: encoder_x10_data_field
Nel record encoder_X10_data_field sono raggruppati dei parametri che sono necessari
per l'ingresso incrementale X10. In questo caso è possibile collegare un encoder incrementale digitale o segnali incrementali emulati, ad es. di un altro CMMP. I segnali di ingresso tramite X10 possono essere utilizzati in funzione di valore nominale o valore effettivo. Ulteriori informazioni su questo argomento sono riportate nel capitolo 6.11.
Nell'oggetto encoder_X10_resolution bisogna specificare quanti incrementi vengono
generati dall'encoder per ogni giro del medesimo. Ciò corrisponde al quadruplo del numero e virgola. L'oggetto encoder_X10_counter fornisce il numero di incrementi contati
(fra 0 e il numero di incrementi impostati -1).
Con gli oggetti encoder_X10_numerator ed encoder_X10_divisor si può contemplare un
eventuale riduttore (anche con segno aritmetico).
Utilizzando il segnale X10 come valore effettivo ciò corrispondebbe ad un riduttore fra il motore e l'encoder collegato su X10, che è montato sulla presa di forza. Utilizzando il segnale X10 come valore nominale, è possibile realizzare rapporti di trasmissione fra
master e slave.
Index 2025h
Name encoder_x10_data_field
Object Code RECORD
No. of Elements 4

6. Impostare parametri
108 Festo P.BE.CMMP-CO-SW-IT 0708NH
Sub-Index 01h
Description encoder_x10_resolution
Data Type UINT32
Access rw
PDO Mapping no
Units incrementi (4 * numero a trattino)
Value Range dipende dall'encoder utilizzato
Default Value dipende dall'encoder utilizzato
Sub-Index 02h
Description encoder_x10_numerator
Data Type INT16
Access rw
PDO Mapping no
Units --
Value Range -32768 … 32767 (eccetto 0)
Default Value 1
Sub-Index 03h
Description encoder_x10_divisor
Data Type INT16
Access rw
PDO Mapping no
Units --
Value Range 1 … 32767
Default Value 1
Sub-Index 04h
Description encoder_x10_counter
Data Type UINT32
Access ro
PDO Mapping yes
Units incrementi (4 * numero a trattino)
Value Range 0 … (encoder_x10_resolution - 1)
Default Value --

6. Impostare parametri
Festo P.BE.CMMP-CO-SW-IT 0708NH 109
6.10 Emulazione dell'encoder incrementale
6.10.1 Panoramica
Questo gruppo di oggetti permette di parametrare l'uscita dell'encoder incrementale X11. Così sotto CANopen è possibile parametrare le applicazioni master-slave in cui l'uscita X11 del master è collegata all'ingresso X10 dello slave.
6.10.2 Descrizione degli oggetti
Oggetti trattati in questo capitolo
Index Oggetto Name Tipo Attr.
2028h VAR encoder_emulation_resolution INT32 rw
201Ah RECORD encoder_emulation_data ro
201Ah_01h VAR encoder_emulation_resolution INT32 rw
201Ah_02h VAR encoder_emulation_offset INT16 rw
Oggetto 201Ah: encoder_emulation_data
Il record oggetti encoder_emulation_data raggruppa tutte le possibilità d'impostazione
per l'uscita dell'encoder incrementale X11.
L'oggetto encoder_emulation_resolution permette di impostare liberamente il numero di
incrementi emessi (= numero a trattino quadruplo) come quadruplo di 4. In una applicazione master-slave questo numero deve corrispondere all'encoder_X10_resolution dello slave per realizzare un rapporto di 1:1.
Con l'oggetto encoder_emulation_offset si può spostare la posizione dell'impulso zero
emesso rispetto alla posizione zero dell'encoder del valore effettivo.
Index 201Ah
Name encoder_emulation_data
Object Code RECORD
No. of Elements 2
Sub-Index 01h
Description encoder_emulation_resolution
Data Type INT32
Access rw
PDO Mapping no
Units incrementi (4 * numero a trattino)
Value Range 4 * (1 … 8192)
Default Value 4096

6. Impostare parametri
110 Festo P.BE.CMMP-CO-SW-IT 0708NH
Sub-Index 02h
Description encoder_emulation_offset
Data Type INT16
Access rw
PDO Mapping no
Units 32767 = 180°
Value Range -32768 … 32767
Default Value 0
Oggetto 2028h: encoder_emulation_resolution
L'oggetto encoder_emulation_resolution è presente solo per motivi di compatibilità. Corrisponde all'oggetto 201Ah_01h.
Index 2028h
Name encoder_emulation_resolution
Object Code VAR
Data Type INT32
Access rw
PDO Mapping no
Units vedi 201Ah _ 01h
Value Range vedi 201Ah _ 01h
Default Value vedi 201Ah _ 01h
6.11 Modulazione del valore nominale/effettivo
6.11.1 Panoramica
I seguenti oggetti permettono di modificare l'origine del valore nominale e l'origine del valore effettivo. Come standard, il motorcontroller utilizza l'ingresso per l'encoder del motore X2A o X2B come valore effettivo per il regolatore di posizione. Utilizzando un encoder esterno, ad es. a valle di un riduttore, il valore di posizione alimentato tramite X10 può essere modulato come valore effettivo per il regolatore.Inoltre tramite X10 è
possibile modulare i segnali in arrivo (ad es. di un secondo controller) come valore nominale supplementare, per cui vengono realizzati modi operativi sincroni.

6. Impostare parametri
Festo P.BE.CMMP-CO-SW-IT 0708NH 111
6.11.2 Descrizione degli oggetti
Oggetti trattati in questo capitolo
Index Oggetto Name Tipo Attr.
2021h VAR position_encoder_selection INT16 rw
2022h VAR synchronisation_encoder_selection INT16 rw
2023h VAR synchronisation_filter_time UINT32 rw
202Fh RECORD synchronisation_selector_data ro
202Fh_07h VAR synchronisation_main UINT16 rw
Oggetto 2021h: position_encoder_selection
L'oggetto position_encoder_selection specifica l'ingresso dell'encoder che viene
utilizzato per determinare la posizione effettiva (encoder del valore effettivo). Questo valore può essere modificato per passare alla regolazione di posizione tramite un encoder esterno (collegato sulla presa di forza). Inoltre è possibile commutare fra X10 e gli ingressi (X2A / X2B) selezionati come encoder di commutazione. Selezionando uno degli ingressi X2A / X2B come encoder del valore effettivo della posizione, allora utilizzare quello che viene impiegato in funzione di encoder di commutazione. Selezionando l'altro encoder, si
passa automaticamente all'encoder di commutazione.
Index 2021h
Name position_encoder_selection
Object Code VAR
Data Type INT16
Access rw
PDO Mapping no
Units --
Value Range 0 … 2 (vedi tabella)
Default Value 0
Valore Denominazione
0 X2A
1 X2B
2 X10
Come encoder del valore effettivo della posizione è possibile selezionare solo fra l'ingresso X10 e il rispettivo encoder di commutazione X2A o X2B. Non è possibile utilizzare la configura- zione X2A come encoder di commutazione e X2B come encoder del valore effettivo della posizione, o viceversa.
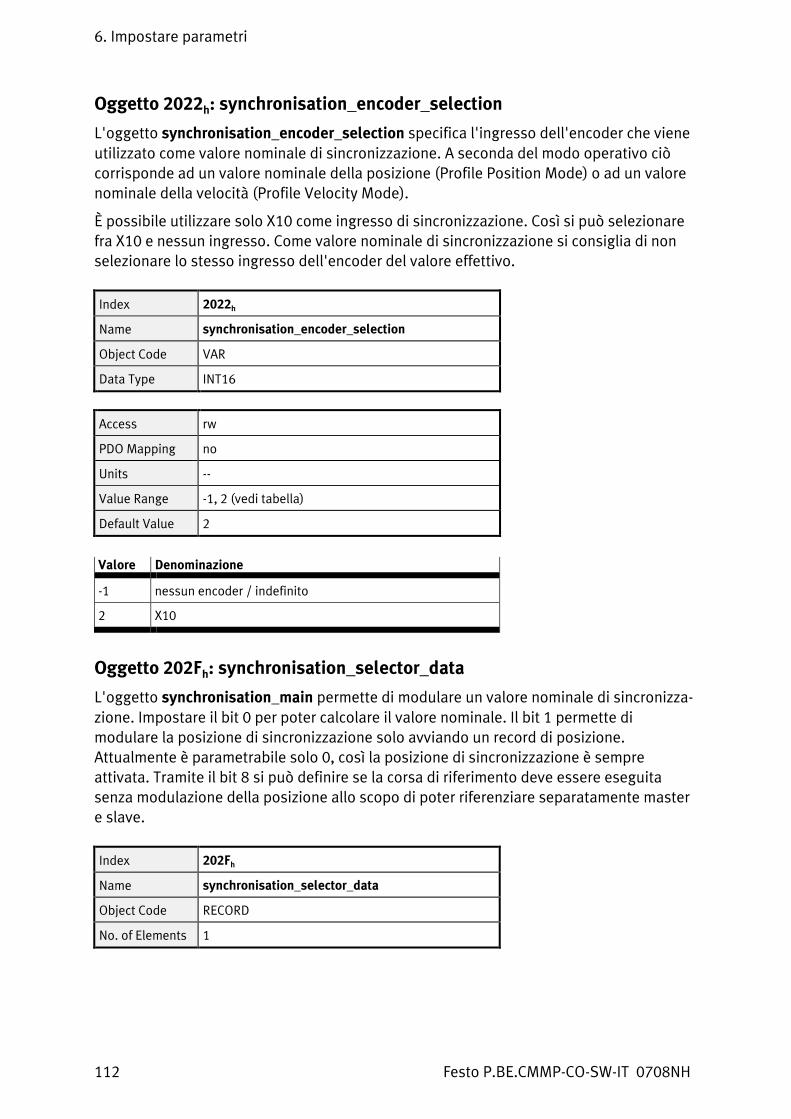
6. Impostare parametri
112 Festo P.BE.CMMP-CO-SW-IT 0708NH
Oggetto 2022h: synchronisation_encoder_selection
L'oggetto synchronisation_encoder_selection specifica l'ingresso dell'encoder che viene
utilizzato come valore nominale di sincronizzazione. A seconda del modo operativo ciò
corrisponde ad un valore nominale della posizione (Profile Position Mode) o ad un valore nominale della velocità (Profile Velocity Mode).
È possibile utilizzare solo X10 come ingresso di sincronizzazione. Così si può selezionare fra X10 e nessun ingresso. Come valore nominale di sincronizzazione si consiglia di non selezionare lo stesso ingresso dell'encoder del valore effettivo.
Index 2022h
Name synchronisation_encoder_selection
Object Code VAR
Data Type INT16
Access rw
PDO Mapping no
Units --
Value Range -1, 2 (vedi tabella)
Default Value 2
Valore Denominazione
-1 nessun encoder / indefinito
2 X10
Oggetto 202Fh: synchronisation_selector_data
L'oggetto synchronisation_main permette di modulare un valore nominale di sincronizza-
zione. Impostare il bit 0 per poter calcolare il valore nominale. Il bit 1 permette di modulare la posizione di sincronizzazione solo avviando un record di posizione. Attualmente è parametrabile solo 0, così la posizione di sincronizzazione è sempre attivata. Tramite il bit 8 si può definire se la corsa di riferimento deve essere eseguita senza modulazione della posizione allo scopo di poter riferenziare separatamente master e slave.
Index 202Fh
Name synchronisation_selector_data
Object Code RECORD
No. of Elements 1

6. Impostare parametri
Festo P.BE.CMMP-CO-SW-IT 0708NH 113
Sub-Index 07h
Description synchronisation_main
Data Type UINT16
Access rw
PDO Mapping no
Units --
Value Range vedi tabella
Default Value --
Bit Valore Significato
0 0001h 0: sincronizzazione inattiva
1: sincronizzazione attiva
1 0002h ‚sega volante‛ non possibile
8 0100h 0: sincronizzazione durante la corsa di riferimento
1: nessuna sincroniz. durante la corsa di riferimento
Oggetto 2023h: synchronisation_filter_time
L'oggetto synchronisation_filter_time permette di definire la costante di tempo di un
filtro PT1 con cui viene livellata la velocità di sincronizzazione. Ciò può essere necessario soprattutto se i numeri a trattino sono piccoli, perché già modifiche minime del valore di ingresso comportano velocità elevate. D'altra parte se i tempi del filtro sono elevati, la velocità dell'attuatore non è eventualmente sufficiente per seguire un segnale di ingresso dinamico.
Index 2023h
Name synchronisation_filter_time
Object Code VAR
Data Type UINT32
Access rw
PDO Mapping no
Units µs
Value Range 10 … 50000
Default Value 600
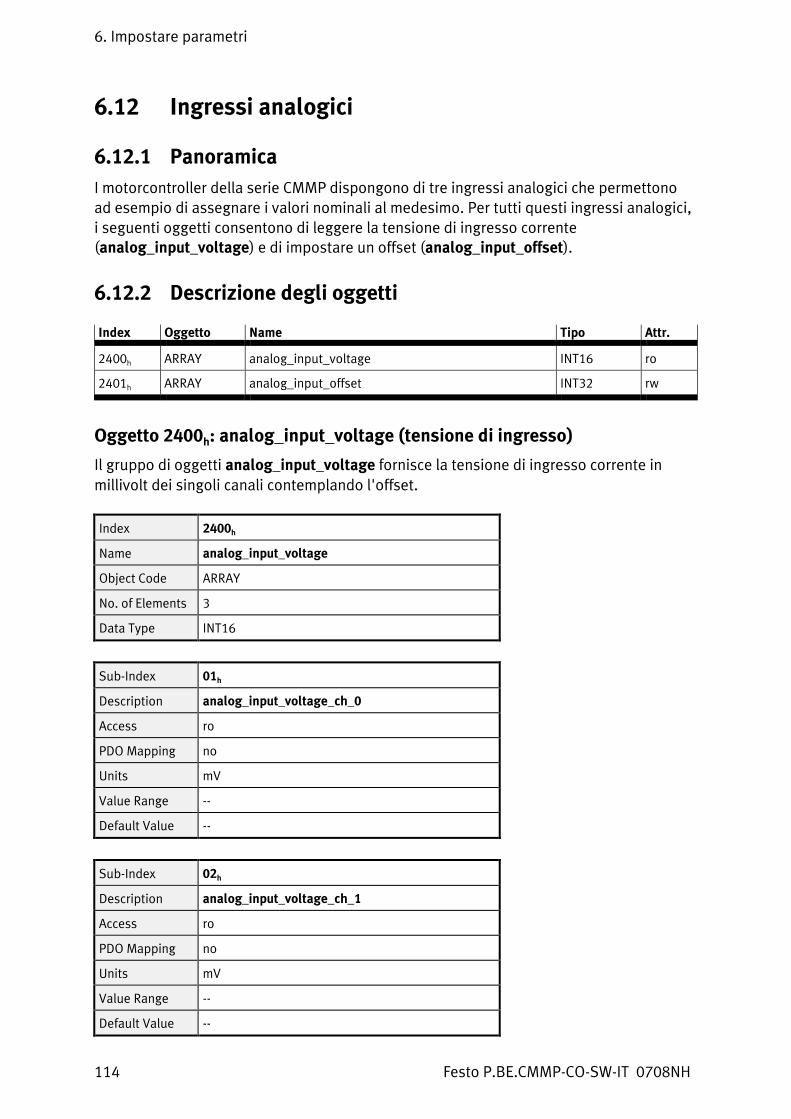
6. Impostare parametri
114 Festo P.BE.CMMP-CO-SW-IT 0708NH
6.12 Ingressi analogici
6.12.1 Panoramica
I motorcontroller della serie CMMP dispongono di tre ingressi analogici che permettono ad esempio di assegnare i valori nominali al medesimo. Per tutti questi ingressi analogici, i seguenti oggetti consentono di leggere la tensione di ingresso corrente (analog_input_voltage) e di impostare un offset (analog_input_offset).
6.12.2 Descrizione degli oggetti
Index Oggetto Name Tipo Attr.
2400h ARRAY analog_input_voltage INT16 ro
2401h ARRAY analog_input_offset INT32 rw
Oggetto 2400h: analog_input_voltage (tensione di ingresso)
Il gruppo di oggetti analog_input_voltage fornisce la tensione di ingresso corrente in
millivolt dei singoli canali contemplando l'offset.
Index 2400h
Name analog_input_voltage
Object Code ARRAY
No. of Elements 3
Data Type INT16
Sub-Index 01h
Description analog_input_voltage_ch_0
Access ro
PDO Mapping no
Units mV
Value Range --
Default Value --
Sub-Index 02h
Description analog_input_voltage_ch_1
Access ro
PDO Mapping no
Units mV
Value Range --
Default Value --

6. Impostare parametri
Festo P.BE.CMMP-CO-SW-IT 0708NH 115
Sub-Index 03h
Description analog_input_voltage_ch_2
Access ro
PDO Mapping no
Units mV
Value Range --
Default Value --
Oggetto 2401h: analog_input_offset (offset ingressi analogici)
Il gruppo di oggetti analog_input_offset permette di impostare o leggere la tensione
offset in millivolt per i relativi ingressi. Con l'ausilio dell'offset si può stabilizzare un'eventuale tensione continua adiacente. Un offset positivo compensa una tensione di ingresso positiva.
Index 2401h
Name analog_input_offset
Object Code ARRAY
No. of Elements 3
Data Type INT32
Sub-Index 01h
Description analog_input_offset_ch_0
Access rw
PDO Mapping no
Units mV
Value Range -10000 … 10000
Default Value 0
Sub-Index 02h
Description analog_input_offset_ch_1
Access rw
PDO Mapping no
Units mV
Value Range -10000 … 10000
Default Value 0

6. Impostare parametri
116 Festo P.BE.CMMP-CO-SW-IT 0708NH
Sub-Index 03h
Description analog_input_offset_ch_2
Access rw
PDO Mapping no
Units mV
Value Range -10000 … 10000
Default Value 0
6.13 Ingressi e uscite digitali
6.13.1 Panoramica
Tutti gli ingressi digitali del motorcontroller e quasi tutte le uscite digitali possono essere rispettivamente letti e impostate a piacere. Inoltre alle uscite digitali del motorcontroller si possono assegnare dei messaggi di stato.
6.13.2 Descrizione degli oggetti
Oggetti trattati in questo capitolo
Index Oggetto Name Tipo Attr.
60FDh VAR digital_inputs UINT32 ro
60FEh ARRAY digital_outputs UINT32 rw
2420h RECORD digital_output_state_mapping ro
2420h_01h VAR dig_out_state_mapp_dout_1 UINT8 rw
2420h_02h VAR dig_out_state_mapp_dout_2 UINT8 rw
2420h_03h VAR dig_out_state_mapp_dout_3 UINT8 rw
Oggetto 60FDh: digital_inputs
Gli ingressi digitali possono essere letti tramite l'oggetto 60FDh.
Index 60FDh
Name digital_inputs
Object Code VAR
Data Type UINT32

6. Impostare parametri
Festo P.BE.CMMP-CO-SW-IT 0708NH 117
Access ro
PDO Mapping yes
Units --
Value Range secondo tabella in basso
Default Value 0
Bit Valore Ingresso digitale
0 00000001h finecorsa negativo
1 00000002h finecorsa positivo
2 00000004h interruttore di riferimento
3 00000008h interlock – (manca l'abilitazione del regolatore
o del modulo terminale)
16 … 23 00FF0000h riservato
24 … 27 0F000000h DIN0 … DIN3
28 10000000h DIN8
29 20000000h DIN9
Oggetto 60FEh: digital_outputs
L'oggetto 60FEh permette di pilotare le uscite digitali. Perciò nell'oggetto digital_outputs_mask specificare quali uscite digitali devono essere pilotate. Poi le uscite selezionate si possono impostare a piacere tramite l'oggetto digital_outputs_data.
Tenere presente che durante il pilotaggio delle uscite digitali si può verificare un ritardo fino a 10 ms. Rileggendo l'oggetto 60FEh si può stabilire quando le uscite vengono
effettivamente impostate.
Index 60FEh
Name digital_outputs
Object Code ARRAY
No. of Elements 2
Data Type UINT32
Sub-Index 01h
Description digital_outputs_data
Access rw
PDO Mapping yes
Units --
Value Range --
Default Value (in funzione dello stato del freno)

6. Impostare parametri
118 Festo P.BE.CMMP-CO-SW-IT 0708NH
Sub-Index 02h
Description digital_outputs_mask
Access rw
PDO Mapping yes
Units --
Value Range --
Default Value 00000000h
Bit Valore Uscita digitale
0 00000001h 1 = azionare freno
16 … 23 0E000000h riservato
25 … 27 0E000000h DOUT1 … DOUT3
Avvertenza
Se l'azionamento del freno è attivato tramite digital_output_mask, il freno di arresto viene ventilato manualmente cancellando il bit 0 in digital_output_data!
Questo inconveniente può provocare una caduta dell'asse in caso di assi pendenti.
Oggetto 2420h: digital_output_state_mapping
Il gruppo di oggetti digital_outputs_state_mapping permette di emettere diversi
messaggi di stato del motorcontroller tramite le uscite digitali.
Perciò per le uscite digitali integrate del motorcontroller è disponibile un proprio
subindice per ogni uscita. Così per ogni uscita è presente un byte in cui è registrato il numero di funzione.
Se a una uscita digitale è stata assegnata una simile funzione e poi l'uscita viene attivata o disattivata direttamente tramite digital_outputs (60FEh), allora anche l'oggetto digital_outputs_state_mapping viene impostato su OFF (0) od ON (12).
Index 2420h
Name digital_outputs_state_mapping
Object Code RECORD
No. of Elements 5

6. Impostare parametri
Festo P.BE.CMMP-CO-SW-IT 0708NH 119
Sub-Index 01h
Description dig_out_state_mapp_dout_1
Data Type UINT8
Access rw
PDO Mapping no
Units --
Value Range 0 … 16, vedi tabella
Default Value 0
Sub-Index 02h
Description dig_out_state_mapp_dout_2
Data Type UINT8
Access rw
PDO Mapping no
Units --
Value Range 0 … 16, vedi tabella
Default Value 0
Sub-Index 03h
Description dig_out_state_mapp_dout_3
Data Type UINT8
Access rw
PDO Mapping no
Units --
Value Range 0 … 16, vedi tabella
Default Value 0

6. Impostare parametri
120 Festo P.BE.CMMP-CO-SW-IT 0708NH
Valore Denominazione
0 off (l'uscita è low)
1 posizione Xnom. = Xarrivo
2 posizione Xeff. = Xarrivo
3 riservato
4 percorso residuo
5 corsa di riferimento attiva
6 velocità di riferimento raggiunta
7 monitoraggio I²t attivo
8 errore di posizionamento
9 sottotensione circuito intermedio
10 freno di arresto ventilato
11 modulo terminale attivo
12 on (l'uscita è high)
13 riservato
14 riservato
15 motore lineare identificato
16 posizione di riferimento valida
6.14 Finecorsa/Interruttori di riferimento
6.14.1 Panoramica
Per definire la posizione di riferimento del motorcontroller si possono utilizzare finecorsa (limit switch) o interruttori (homing switch). Ulteriori informazioni relative agli eventuali metodi della corsa di riferimento sono riportate nel capitolo 8.2, Modo operativo corsa di riferimento (Homing Mode).
6.14.2 Descrizione degli oggetti
Index Oggetto Name Tipo Attr.
6510h RECORD drive_data rw
Oggetto 6510h_11h: limit_switch_polarity
La polarità dei finecorsa può essere programmata tramite l'oggetto 6510h_11h (limit_switch_polarity). Per i finecorsa di apertura introdurre uno ‚0‛ in questo oggetto e
un ‚1‛ quando si utilizzano contatti di chiusura.

6. Impostare parametri
Festo P.BE.CMMP-CO-SW-IT 0708NH 121
Index 6510h
Name drive_data
Object Code RECORD
No. of Elements 51
Sub-Index 11h
Description limit_switch_polarity
Data Type INT16
Access rw
PDO Mapping no
Units --
Value Range 0, 1
Default Value 1
Valore Significato
0 contatto n.c.
1 contatto n.a.
Oggetto 6510h_12h: limit_switch_selector
L'oggetto 6510h_12h (limit_switch_selector) permette di scambiare l'assegnazione dei
finecorsa (negativo, positivo) senza dover eseguire modifiche sul cablaggio. Introdurre un uno per scambiare l'assegnazione dei finecorsa.
Sub-Index 12h
Description limit_switch_selector
Data Type INT16
Access rw
PDO Mapping no
Units --
Value Range 0, 1
Default Value 0
Valore Significato
0 DIN6 = E0 (finecorsa negativo)
DIN7 = E1 (finecorsa positivo)
1 DIN6 = E1 (finecorsa positivo)
DIN7 = E0 (finecorsa negativo)
Tab. 6.1: Scambiare l'assegnazione dei finecorsa

6. Impostare parametri
122 Festo P.BE.CMMP-CO-SW-IT 0708NH
Oggetto 6510h_14h: homing_switch_polarity
La polarità dell'interruttore di riferimento può essere programmata tramite l'oggetto 6510h_14h (homing_switch_polarity). Per un interruttore di apertura introdurre uno ‚0‛ in
questo oggetto e un ‚1‛ quando si utilizzano contatti di chiusura.
Sub-Index 14h
Description homing_switch_polarity
Data Type INT16
Access rw
PDO Mapping no
Units --
Value Range 0, 1
Default Value 1
Valore Significato
0 contatto n.c.
1 contatto n.a.
Oggetto 6510h_13h: homing_switch_selector
L'oggetto 6510h_13h (homing_switch_selector) definisce se utilizzare DIN8 o DIN9 in
funzione di interruttore di riferimento.
Sub-Index 13h
Description homing_switch_selector
Data Type INT16
Access rw
PDO Mapping no
Units --
Value Range 0, 1
Default Value 0
Valore Significato
0 DIN9
1 DIN8

6. Impostare parametri
Festo P.BE.CMMP-CO-SW-IT 0708NH 123
Oggetto 6510h_15h: limit_switch_deceleration
L'oggetto limit_switch_deceleration definisce l'accelerazione con cui si decelera se
durante l'esercizio normale viene raggiunto il finecorsa (rampa di stop d'emergenza del
finecorsa).
Sub-Index 15h
Description limit_switch_deceleration
Data Type INT32
Access rw
PDO Mapping no
Units acceleration units
Value Range 0 … 3000000 min-1/s
Default Value 2000000 min-1/s
6.15 Campionamento di posizioni
6.15.1 Panoramica
La serie CMMP permette di memorizzare il valore effettivo della posizione sul fronte di risalita o di discesa di un ingresso digitale. Poi questo valore di posizione può ad es. essere letto per il calcolo all'interno di un sistema di comando.
Tutti gli oggetti necessari sono raggruppati nel record sample_data. L'oggetto sample_mode definisce il tipo di campionamento: è opportuno registrare solo un unico
evento di campionamento o si deve campionare continuamente ? Tramite l'oggetto sample_status si può interrogare il sistema di comando per accertare se si è verificato un
evento di campionamento. Questa condizione viene segnalata da un bit settato, che può essere visualizzato nello statusword se l'oggetto sample_status_mask è impostato in
maniera adeguata.
L'oggetto sample_control serve per controllare l'attivazione dell'evento di campiona-
mento ed infine si possono leggere le posizioni campionate tramite gli oggetti sample_position_rising_edge e sample_position_falling_edge.
L'ingresso digitale da utilizzare può essere definito con il software di parametrazione sotto ‚parametri / IO / ingressi digitali / ingresso di campionamento‛.

6. Impostare parametri
124 Festo P.BE.CMMP-CO-SW-IT 0708NH
6.15.2 Descrizione degli oggetti
Oggetti trattati in questo capitolo
Index Oggetto Name Tipo Attr.
204Ah RECORD sample_data ro
204Ah_01h VAR sample_mode UINT16 rw
204Ah_02 VAR sample_status UINT8 ro
204Ah_03h VAR sample_status_mask UINT8 rw
204Ah_04h VAR sample_control UINT8 wo
204Ah_05h VAR sample_position_rising_edge INT32 ro
204Ah_06h VAR sample_position_falling_edge INT32 ro
Oggetto 204Ah: sample_data
Index 204Ah Name sample_data
Object Code RECORD
No. of Elements 6
Con il seguente oggetto si può selezionare se ad ogni evento di campionamento bisogna determinare la posizione (campionamento continuo) o se il campionamento deve essere bloccato dopo un evento finché non viene sbloccato nuovamente. Tenere presente che anche un rimbalzo può attivare i due fronti!
Sub-Index 01h
Description sample_mode
Data Type UINT16
Access rw
PDO Mapping no
Units --
Value Range 0 … 1, vedi tabella
Default Value 0
Valore Denominazione
0 campionamento continuo
1 autolock sampling
Il seguente oggetto mostra un nuovo evento di campionamento.

6. Impostare parametri
Festo P.BE.CMMP-CO-SW-IT 0708NH 125
Sub-Index 02h
Description sample_status
Data Type UINT8
Access ro
PDO Mapping yes
Units --
Value Range 0 … 3, vedi tabella
Default Value 0
Bit Valore Name Descrizione
0 01h falling_edge_occurred = 1: nuova posizione di campionamento (fronte di discesa)
1 02h rising_edge_occurred = 1: nuova posizione di campionamento (fronte di risalita)
Il seguente oggetto permette di definire i bit dell'oggetto sample_status, che devono
determinare anche l'impostazione del bit 15 dello statusword. In tal modo nello statusword normalmente da trasferire è presente l'informazione ‚Sample-Event occurred‛, così il sistema di comando deve leggere l'oggetto sample_status sono in
questo caso per eventualmente accertare quale fronte si è verificato.
Sub-Index 03h
Description sample_status_mask
Data Type UINT8
Access rw
PDO Mapping yes
Units --
Value Range 0 … 1, vedi tabella
Default Value 0
Bit Valore Name Descrizione
0 01h rising_edge_visible se rising_edge_occured = 1 => parola di stato bit 15 = 1
1 02h falling_edge_visible se falling_edge_occured = 1 => parola di stato bit 15 = 1
L'impostazione di un bit in sample_control risetta il relativo bit di stato in sample_status
e riattiva il campionamento in caso di ‚Autolock-Sampling‛.

6. Impostare parametri
126 Festo P.BE.CMMP-CO-SW-IT 0708NH
Sub-Index 04h
Description sample_control
Data Type UINT8
Access wo
PDO Mapping yes
Units --
Value Range 0 … 1, vedi tabella
Default Value 0
Bit Valore Name Descrizione
0 01h falling_edge_enable campionamento con fronte di discesa
1 02h rising_edge_enable campionamento con fronte di risalita
I seguenti oggetti contengono le posizioni campionate.
Sub-Index 05h
Description sample_position_rising_edge
Data Type INT32
Access ro
PDO Mapping yes
Units position units
Value Range --
Default Value --
Sub-Index 06h
Description sample_position_falling_edge
Data Type INT32
Access ro
PDO Mapping yes
Units position units
Value Range --
Default Value --

6. Impostare parametri
Festo P.BE.CMMP-CO-SW-IT 0708NH 127
6.16 Azionamento del freno
6.16.1 Panoramica
I seguenti oggetti permettono di parametrare il modo in cui il motorcontroller aziona un freno di arresto eventualmente incorporato nel motore. Il freno viene sempre sbloccato non appena l'abilitazione del regolatore viene attivata. Per i freni dotati di una notevole forza d'inerzia meccanica si può parametrare un tempo di ritardo affinché siano innestati prima che il modulo terminale venga disattivato (abbassamento di assi verticali). Questo ritardo viene parametrato tramite l'oggetto brake_delay_time. Attivando l'abilitazione del regolatore, il valore nominale della velocità viene attivato solo dopo il brake_delay_time
e il disinserzione della regolazione viene ritardata di questo tempo disattivando l'abilitazione del regolatore (vedi schizzo).
Speed command value
Internal controller release
Speed actual value
DIN5 Controller release
Holding brake released
0
1
0
+
0
-
+
0
-
1
1
0
tF tF
tF: Run delay
Fig. 6.8: Funzione del ritardo del freno (con regolazione della velocità/posizionamento)
6.16.2 Descrizione degli oggetti
Index Oggetto Name Tipo Attr.
6510h RECORD drive_data rw
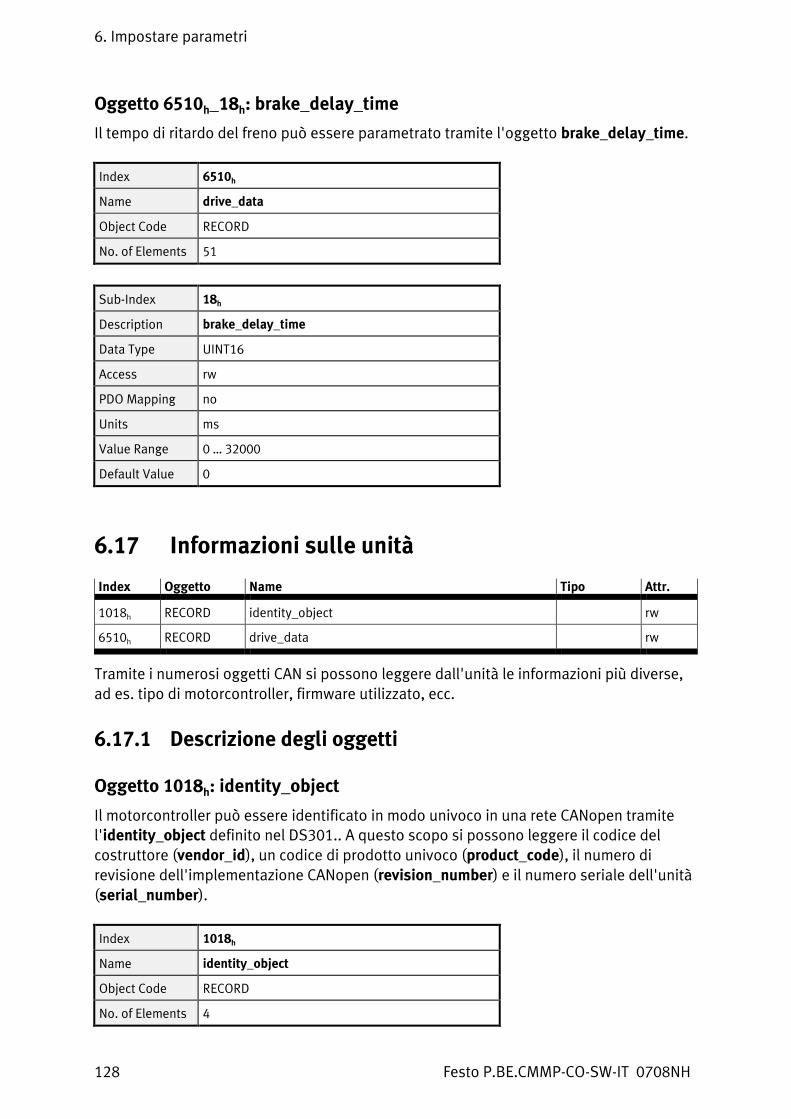
6. Impostare parametri
128 Festo P.BE.CMMP-CO-SW-IT 0708NH
Oggetto 6510h_18h: brake_delay_time
Il tempo di ritardo del freno può essere parametrato tramite l'oggetto brake_delay_time.
Index 6510h
Name drive_data
Object Code RECORD
No. of Elements 51
Sub-Index 18h
Description brake_delay_time
Data Type UINT16
Access rw
PDO Mapping no
Units ms
Value Range 0 … 32000
Default Value 0
6.17 Informazioni sulle unità
Index Oggetto Name Tipo Attr.
1018h RECORD identity_object rw
6510h RECORD drive_data rw
Tramite i numerosi oggetti CAN si possono leggere dall'unità le informazioni più diverse, ad es. tipo di motorcontroller, firmware utilizzato, ecc.
6.17.1 Descrizione degli oggetti
Oggetto 1018h: identity_object
Il motorcontroller può essere identificato in modo univoco in una rete CANopen tramite l'identity_object definito nel DS301.. A questo scopo si possono leggere il codice del costruttore (vendor_id), un codice di prodotto univoco (product_code), il numero di revisione dell'implementazione CANopen (revision_number) e il numero seriale dell'unità
(serial_number).
Index 1018h
Name identity_object
Object Code RECORD
No. of Elements 4
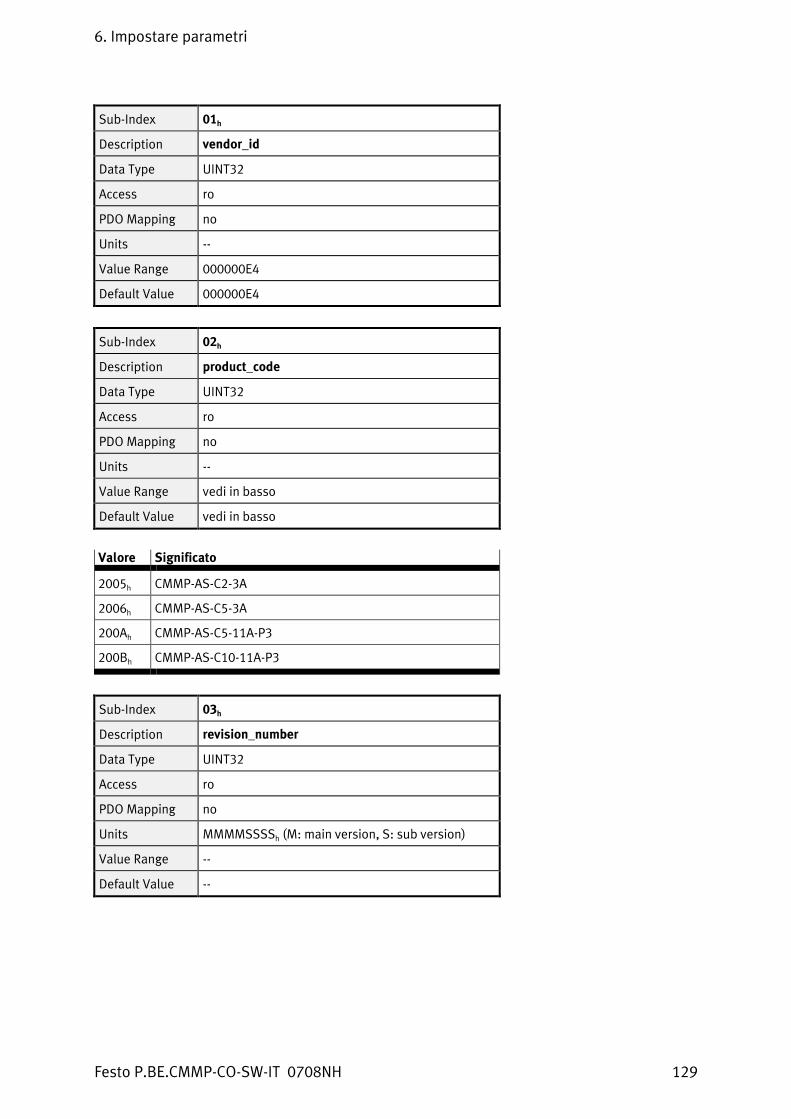
6. Impostare parametri
Festo P.BE.CMMP-CO-SW-IT 0708NH 129
Sub-Index 01h
Description vendor_id
Data Type UINT32
Access ro
PDO Mapping no
Units --
Value Range 000000E4
Default Value 000000E4
Sub-Index 02h
Description product_code
Data Type UINT32
Access ro
PDO Mapping no
Units --
Value Range vedi in basso
Default Value vedi in basso
Valore Significato
2005h CMMP-AS-C2-3A
2006h CMMP-AS-C5-3A
200Ah CMMP-AS-C5-11A-P3
200Bh CMMP-AS-C10-11A-P3
Sub-Index 03h
Description revision_number
Data Type UINT32
Access ro
PDO Mapping no
Units MMMMSSSSh (M: main version, S: sub version)
Value Range --
Default Value --

6. Impostare parametri
130 Festo P.BE.CMMP-CO-SW-IT 0708NH
Sub-Index 04h
Description serial_number
Data Type UINT32
Access ro
PDO Mapping no
Units --
Value Range --
Default Value --
Oggetto 6510h_A0h: drive_serial_number
L'oggetto drive_serial_number permette di leggere il numero seriale del regolatore.
Questo oggetto viene utilizzato per la compatibilità rispetto a versioni precedenti.
Index 6510h
Name drive_data
Object Code RECORD
No. of Elements 51
Sub-Index A0h
Description drive_serial_number
Data Type UINT32
Access ro
PDO Mapping no
Units --
Value Range --
Default Value --
Oggetto 6510h_A1h: drive_type
L'oggetto drive_type permette di leggere il tipo di unità del regolatore. Questo oggetto
viene utilizzato per la compatibilità rispetto a versioni precedenti.
Sub-Index A1h
Description drive_type
Data Type UINT32
Access ro
PDO Mapping no
Units --
Value Range vedi 1018h _ 02h, product_code
Default Value vedi 1018h _ 02h, product_code

6. Impostare parametri
Festo P.BE.CMMP-CO-SW-IT 0708NH 131
Oggetto 6510h_A9h: firmware_main_version
L'oggetto firmware_main_version permette di leggere il numero della versione principale
del firmware (livello di prodotto).
Sub-Index A9h
Description firmware_main_version
Data Type UINT32
Access ro
PDO Mapping no
Units MMMMSSSSh (M: main version, S: sub version)
Value Range --
Default Value --
Oggetto 6510h_AAh: firmware_custom_version
Tramite l'oggetto firmware_custom_version si può leggere il numero di versione della
variante personalizzata del firmware.
Sub-Index AAh
Description firmware_custom_version
Data Type UINT32
Access ro
PDO Mapping no
Units MMMMSSSSh (M: main version, S: sub version)
Value Range --
Default Value --
Oggetto 6510h_ADh: km_release
Tramite il numero di versione del km_release si possono distinguere gli stati firmware del
medesimo livello di prodotto.
Sub-Index ADh
Description km_release
Data Type UINT32
Access ro
PDO Mapping no
Units --
Value Range MMMMSSSSh (M: main version, S: sub version)
Default Value --

6. Impostare parametri
132 Festo P.BE.CMMP-CO-SW-IT 0708NH
Oggetto 6510h_ACh: firmware_type
L'oggetto firmware_type permette di rilevare per quale serie di unità e per quale tipo di
resolver è adatto il firmware caricato. L'interfaccia del resolver non è più inseribile per la
serie CMMP, per cui tutti i bit sono sempre impostati nel parametro G (Fh).
Sub-Index ACh
Description firmware_type
Data Type UINT32
Access ro
PDO Mapping no
Units 000000GXh
Value Range 00000F2h
Default Value 00000F2h
Valore (x) Significato
0h IMD-F
1 h CMMP-AS
2 h CMMP-AS-C2-3A
Oggetto 6510h_B0h: cycletime_current_controller
L'oggetto cycletime_current_controller permette di leggere il tempo ciclo del regolatore
di corrente in microsecondi.
Sub-Index B0h
Description cycletime_current_controller
Data Type UINT32
Access ro
PDO Mapping no
Units µs
Value Range --
Default Value 00000068h

6. Impostare parametri
Festo P.BE.CMMP-CO-SW-IT 0708NH 133
Oggetto 6510h_B1h: cycletime_velocity_controller
L'oggetto cycletime_velocità_controller permette di leggere il tempo ciclo del regolatore
di velocità in microsecondi.
Sub-Index B1h
Description cycletime_velocity_controller
Data Type UINT32
Access ro
PDO Mapping no
Units µs
Value Range --
Default Value 000000D0h
Oggetto 6510h_B2h: cycletime_position_controller
L'oggetto cycletime_position_controller permette di leggere il tempo ciclo del regolatore
di posizione in microsecondi.
Sub-Index B2h
Description cycletime_position_controller
Data Type UINT32
Access ro
PDO Mapping no
Units µs
Value Range --
Default Value 000001A0h
Oggetto 6510h_B3h: cycletime_trajectory_generator
L'oggetto cycletime_trajectory_generator permette di leggere il tempo ciclo del comando
di posizionamento in microsecondi.
Sub-Index B3h
Description cycletime_tracectory_generator
Data Type UINT32
Access ro
PDO Mapping no
Units µs
Value Range --
Default Value 00000341h

6. Impostare parametri
134 Festo P.BE.CMMP-CO-SW-IT 0708NH
Oggetto 6510h_C0h: commissioning_state
L'oggetto commissioning_state viene descritto dal software se determinate
parametrazioni sono state eseguite (ad es. la corrente nominale). Dopo la consegna e restore_default_parameter questo oggetto contiene uno zero. In questo caso sul display
a 7 segmenti del motorcontroller viene visualizzata una ‚A‛ per indicare che questa unità non è stata ancora parametrata. Se il motorcontroller viene parametrato completamente sotto CANopen, allora bisogna impostare minimo un bit in questo oggetto per sopprimere l'indicazione ‚A‛. Naturalmente all'occorrenza è possibile utilizzare questo oggetto per ricordarsi dello stato di parametrazione del controller. In questo caso tenere presente che anche il software di parametrazione accede a questo oggetto.
Sub-Index C0h
Description commisioning_state
Data Type UINT32
Access rw
PDO Mapping no
Units --
Value Range --
Default Value 0
Valore Significato
0 corrente nominale valida
1 corrente max. valida
2 numero di poli del motore valido
3 angolo offset / senso di rotazione validi
4 riservato
5 angolo offset / senso di rotazione trasduttore Hall validi
6 riservato
7 posizione assoluta sistema encoder validi
8 parametri regolatore di corrente validi
9 riservato
10 fisica; unità valide
11 regolatore di velocità valido
12 regolatore di posizione valido
13 parametri di sicurezza validi
14 riservato
15 polarità finecorsa valida
16 … 31 riservato

6. Impostare parametri
Festo P.BE.CMMP-CO-SW-IT 0708NH 135
Attenzione
Questo oggetto non contiene informazioni in merito alla para- metrazione corretta del motorcontroller secondo il motore e l'applicazione, bensì solo riguardo al fatto che i punti summenzio- nati siano stati parametrati almeno una volta dopo la consegna.
“A” sul display a 7 segmenti
Tenere presente che nell'oggetto commissioning_state deve essere impostato almeno un bit per sopprimere la ‚A‛ sul display del motorcontroller.
6.18 Gestione degli errori
6.18.1 Panoramica
I motorcontroller della serie CMMP permettono di cambiare la reazione agli errori di singoli eventi, ad es. quando si verifica un errore di posizionamento. Così il motor- controller reagisce in modo diverso al verificarsi di un determinato evento: è possibile una decelerazione a seconda dell'impostazione, la disattivazione immediata del modulo
terminale però anche solo la visualizzazione di una avvertenza sul display.
Per ogni evento il costruttore ha contemplato una reazione minima che non può essere superata. Così non è possibile riparametrare gli errori ‚critici‛, ad es. 06-0 cortocircuito
modulo terminale perché in questo caso è necessaria una disinserzione immediata per
proteggere il motorcontroller contro eventuali danni irreparabili.
Registrando una reazione più bassa rispetto a quella ammissibile per il relativo errore,
allora il valore viene limitato alla reazione minima consentita.Una lista dei numeri di errore è riportata nel manuale software ‚Motorcontroller CMMP‛.
6.18.2 Descrizione degli oggetti
Oggetti trattati in questo capitolo
Index Oggetto Name Tipo Attr.
2100h RECORD error_management ro
2100_01h VAR error_number UINT8 rw
2100_02h VAR error_reaction_code UINT8 rw
200Fh VAR last_warning_code UINT16 ro

6. Impostare parametri
136 Festo P.BE.CMMP-CO-SW-IT 0708NH
Oggetto 2100h: error_management
Index 2100h
Name error_management
Object Code RECORD
No. of Elements 2
Nell'oggetto error_number specificare il numero di errore principale la cui reazione deve
essere cambiata. In genere il numero va specificato prima della lineetta (ad es. errore 08-2, numero 8). Per gli evenuali numeri di errore vedi anche capitolo 5.5.
Sub-Index 01h
Description error_number
Data Type UINT8
Access rw
PDO Mapping no
Units --
Value Range 1 … 96
Default Value 1
La reazione all'errore può essere cambiata nell'oggetto error_reaction_code. La reazione
minima viene limitata se quella contemplata dal costruttore viene superata. La reazione effettivamente impostata può essere determinata mediante la rilettura.
Sub-Index 02h
Description error_reaction_code
Data Type UINT8
Access rw
PDO Mapping no
Units --
Value Range 0, 1, 3, 5, 7, 8
Default Value dipende dall'error_number
Valore Significato
0 nessuna azione
1 record nel buffer
3 avvertenza sul display a 7 segmenti
5 abilitazione regolatore off
7 freni con corrente max.
8 modulo terminale off
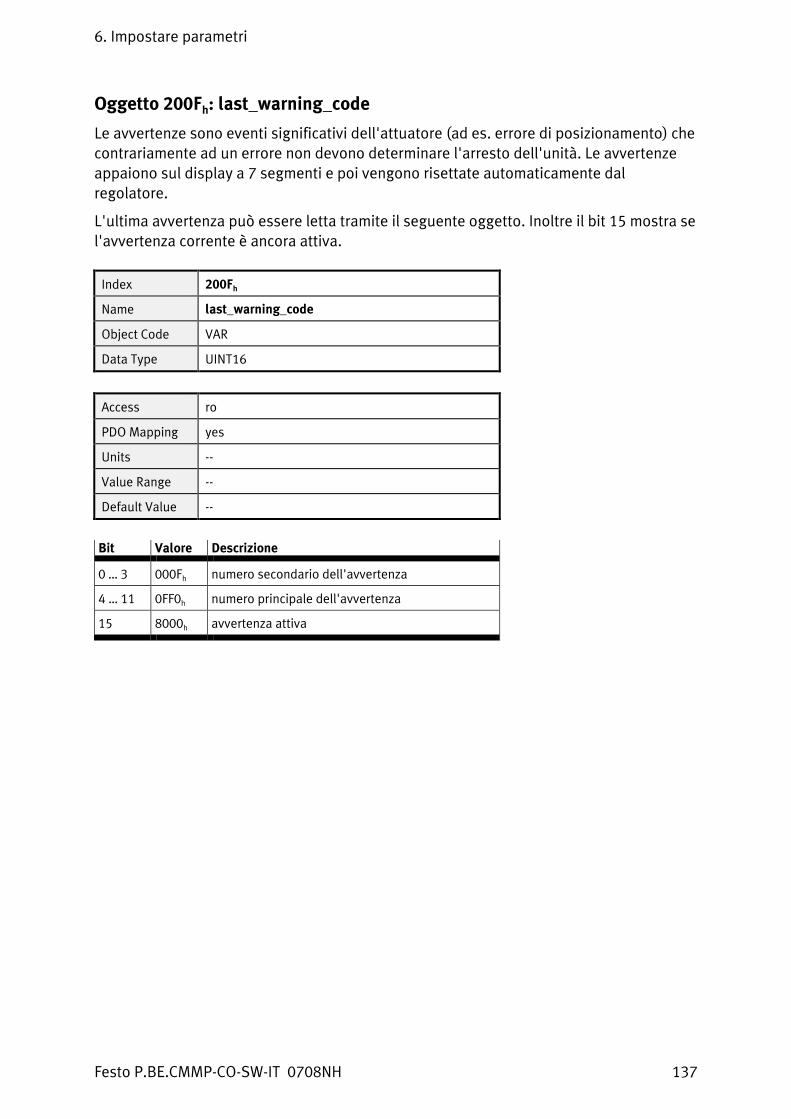
6. Impostare parametri
Festo P.BE.CMMP-CO-SW-IT 0708NH 137
Oggetto 200Fh: last_warning_code
Le avvertenze sono eventi significativi dell'attuatore (ad es. errore di posizionamento) che contrariamente ad un errore non devono determinare l'arresto dell'unità. Le avvertenze
appaiono sul display a 7 segmenti e poi vengono risettate automaticamente dal regolatore.
L'ultima avvertenza può essere letta tramite il seguente oggetto. Inoltre il bit 15 mostra se l'avvertenza corrente è ancora attiva.
Index 200Fh
Name last_warning_code
Object Code VAR
Data Type UINT16
Access ro
PDO Mapping yes
Units --
Value Range --
Default Value --
Bit Valore Descrizione
0 … 3 000Fh numero secondario dell'avvertenza
4 … 11 0FF0h numero principale dell'avvertenza
15 8000h avvertenza attiva

7. Controllo dell'unità (Device Control)
138 Festo P.BE.CMMP-CO-SW-IT 0708NH
7. Controllo dell'unità (Device Control)
7.1 Diagramma di stato (State Machine)
7.1.1 Panoramica
Il seguente capitolo descrive come il motorcontroller viene controllato sotto CANopen, ad es. come viene attivato il modulo terminale e tacitato un errore.
Sotto CANopen il controllo totale del motorcontroller viene realizzato tramite due oggetti: l'host può controllare l'unità tramite il controlword, mentre il relativo stato può essere riletto nell'oggetto statusword. Per la spiegazione del controllo vengono utilizzati i termini
qui elencati:
Stato
(State) Il motorcontroller si trova in diversi stati a seconda se il modulo terminale è attivato o se si è verificato un errore. Gli stati definiti
sotto CANopen vengono descritti nel corso del capitolo.
Esempio: SWITCH_ON_DISABLED
Transizione di stato
(State Transition) Esattamente come gli stati, anche sotto CANopen viene definito come si passa da uno stato ad un altro (ad es. per tacitare un
errore). Le transizioni di stato vengono attivate dall'host mediante l'impostazione di bit nell'oggetto controlword o internamente dal
motorcontroller se questo, ad esempio, identifica un errore.
Comando
(Command) Per attivare le transizioni di stato bisogna impostare determinate combinazioni di bit nel controlword. Una simile combinazione
viene designata ‚comando‛.
Esempio: Enable Operation
Diagramma di stato
(State Machine) Gli stati e le transizioni formano insieme il diagramma di stato, cioè il prospetto di tutti gli stati e delle transizioni possibili.

7. Controllo dell'unità (Device Control)
Festo P.BE.CMMP-CO-SW-IT 0708NH 139
7.1.2 Diagramma di stato del motorcontroller (State Machine)
NOT_READY_TO-SWITCH_ON
SWITCH_ON_DISABLED
READY_TO_SWITCH_ON
SWITCHED_ON
OPERATION_ENABLE
FAULT_REACTION_ACTIVE
FAULT
QUICK_STOP_ACTIVE
0
1
2
3
4 5
6
7
89
10
11
12
13
14
15
Power enabled
(Endstufe an)
Fault
(Fehler)Power disabled
(Endstufe aus)
Fig. 7.1: Diagramma di stato del motorcontroller
Il diagramma di stato può essere suddiviso approssimativamente in tre sezioni: ‚Power Disabled‛ e ‚Power Enabled‛ significano che il modulo terminale è rispettivamente disattivato e attivato. Nella sezione ‚Fault‛ sono raggruppati gli stati necessari per il trattamento degli errori.
Gli stati più importanti del motorcontroller sono evidenziati sul diagramma. Dopo l'avviamento il motorcontroller viene inizializzato e poi raggiunge lo stato SWITCH_ON_DISABLED. In questo stato la comunicazione CAN è completamente funzio-
nante e il motorcontroller può essere parametrato (ad es. impostazione del modo operativo ‚regolazione della velocità‛). Il modulo terminale è disattivato e quindi l'albero può girare liberamente. Attraverso le transizioni di stato 2, 3, 4 – il che equivale in linea di massima all'abilitazione del regolatore CAN – si accede allo stato OPERATION_ENABLE. In
questo stato il modulo terminale è attivato e il motore viene regolato in funzione del modo operativo impostato. Perciò prima assicurarsi che l'attuatore sia parametrato correttamente e che un apposito valore nominale sia uguale a zero.

7. Controllo dell'unità (Device Control)
140 Festo P.BE.CMMP-CO-SW-IT 0708NH
La transizione di stato 9 equivale all'eliminazione dell'abilitazione, cioè un motore ancora in funzione si spegne in modo incontrollato.
Se si verifica un errore, allora si salta infine (indipendentemente da quale stato) nello stato FAULT. A seconda della gravità dell'errore si possono eseguire ancora determinate azioni, ad es. una decelerazione d'emergenza (FAULT_REACTION_ACTIVE).
Per eseguire le transizioni di stato menzionate bisogna impostare determinate combinazioni di bit nel controlword (vedi in basso). I 4 bit inferiori del controlword
vengono analizzati insieme per attivare una transizione di stato. Qui appresso vengono spiegate prima le transizioni più importanti 2, 3, 4, 9 e 15. Una tabella di tutti gli stati e transizioni possibili è riportata alla fine di questo capitolo.
La tabella seguente riporta, nella prima e seconda colonna, rispettivamente la transizione di stato desiderata e le condizioni richieste (il più delle volte un comando tramite l'host, qui incorniciato). Come questo comando viene generato, cioè quali bit devono essere impostati nel controlword, è riportato nella terza colonna (x = non rilevante).
Nr. Viene eseguito se Combinazione di bit (controlword)
Azione
Bit 3 2 1 0
2
Abilitazione modulo terminale e
regolatore disponibile + comando
Shutdown
Shutdown x 1 1 0 Nessuno
3 Comando Switch On Switch On x 1 1 1 Attivazione del modulo
terminale
4 Comando Enable Operation Enable Operation 1 1 1 1 Regolazione secondo il modo
operativo impostato
9 Comando Disable Voltage Disable Voltage x x 0 x
Il modulo terminale viene
bloccato Il motore può girare
liberamente
15 Errore eliminato + comando
Fault Reset Fault Reset Bit 7 = Tacitare errore
Tab. 7.1: Le transizioni di stato più importanti del motorcontroller

7. Controllo dell'unità (Device Control)
Festo P.BE.CMMP-CO-SW-IT 0708NH 141
ESEMPIO Una volta parametrato il motorcontroller, questo deve essere
“abilitato”, cioè bisogna attivare il modulo terminale:
1.) Il motorcontroller è nello stato SWITCH_ON_DISABLED
2.) Il motorcontroller deve passare allo stato OPERATION_ENABLE
3.) Secondo il diagramma di stato (Fig. 7.1) bisogna eseguire le
transizioni 2, 3 e 4
4.) Dalla Tab. 7.1 segue:
Transizione 2: controlword = 0006h Nuovo stato: READY_TO_SWITCH_ON *1)
Transizione 3: controlword = 0007h Nuovo stato: SWITCHED_ON *1)
Transizione 4: controlword = 000Fh Nuovo stato: OPERATION_ENABLE *1) Nota
1.) L'esempio parte dal presupposto che nel controlword non siano
impostati altri bit (per le transizioni sono importanti solo i
bit 0 … 3).
2.) Le transizioni 3 e 4 possono essere raggruppate impostando il
controlword direttamente su 000Fh. Il bit 3 impostato non è
rilevante per la transizione di stato 2.
*1) L'host deve aspettare finché non sarà possibile rileggere lo stato
nello statusword, che verrà descritto dettagliatamente nelle pagine
successive.
Diagramma di stato: stati
Nella tabella seguente sono riportati tutti gli stati e il relativo significato.
Name Significato
NOT_READY_TO_SWITCH_ON Il motorcontroller esegue un autotest. La comunicazione CAN non
funziona ancora
SWITCH_ON_DISABLED Il motorcontroller ha terminato l'autotest. La comunicazione CAN è
possibile
READY_TO_SWITCH_ON Il motorcontroller aspetta finché gli ingressi digitali ‚abilitazione modulo
terminale e regolatore‛ non sono applicati su 24 V (logica di abilitazione
regolatore ‚ingresso digitale e CAN‛)
SWITCHED_ON *1) Il modulo terminale è attivato
OPERATION_ENABLE *1) Il motore è sotto tensione e viene regolato in funzione del modo operativo
QUICKSTOP_ACTIVE *1) Viene eseguita la funzione Quick Stop (vedi: quick_stop_option_code).
Il motore è sotto tensione e viene regolato secondo la funzione Quick Stop

7. Controllo dell'unità (Device Control)
142 Festo P.BE.CMMP-CO-SW-IT 0708NH
Name Significato
FAULT_REACTION_ACTIVE *1) Si è verificato un errore. In caso di errori critici si passa immediatamente
allo stato Fault. Altrimenti viene eseguita l'azione prestabilita nel
fault_reaction_option_code. Il motore è sotto tensione e viene regolato
secondo la funzione Fault Reaction
FAULT Si è verificato un errore. Il motore è diseccitato
*1) Il modulo terminale è attivato
Diagramma di stato: transizioni di stato
Nella tabella seguente sono riportati tutti gli stati e il relativo significato.
Nr. Viene eseguito se Combinazione di bit (controlword)
Azione
Bit 3 2 1 0
0 Attivato o reset eseguito Transizione interna Eseguire l'autotest
1 Autotest riuscito Transizione interna Attivazione della comunicaz. CAN
2
Abilitazione modulo terminale
e regolatore disponibile +
comando Shutdown
Shutdown x 1 1 0 -
3 Comando Switch On Switch On x 1 1 1 Attivazione del modulo terminale
4 Comando Enable Operation Enable Operation 1 1 1 1 Regolazione secondo il modo
operativo impostato
5 Comando Disable Operation Disable Operation 0 1 1 1 Il modulo terminale viene bloccato
Il motore può girare liberamente
6 Comando Shutdown Shutdown x 1 1 0 Il modulo terminale viene bloccato
Il motore può girare liberamente
7 Comando Quick Stop Quick Stop x 0 1 x -
8 Comando Shutdown Shutdown x 1 1 0 Il modulo terminale viene bloccato
Il motore può girare liberamente
9 Comando Disable Voltage Disable Voltage x x 0 x Il modulo terminale viene bloccato
Il motore può girare liberamente
10 Comando Disable Voltage Disable Voltage x x 0 x Il modulo terminale viene bloccato
Il motore può girare liberamente
11 Comando Quick Stop Quick Stop x 0 1 x Viene avviata una decelerazione
secondo quick_stop_ option_code
12 Decelerazione terminata o
comando Disable Voltage Disable Voltage x x 0 x
Il modulo terminale viene bloccato
Il motore può girare liberamente
13 Errore Transizione interna
In caso di errori non critici reazione
secondo fault_reaction_option_
code. In caso di errori critici segue
transizione 14

7. Controllo dell'unità (Device Control)
Festo P.BE.CMMP-CO-SW-IT 0708NH 143
Nr. Viene eseguito se Combinazione di bit (controlword)
Azione
Bit 3 2 1 0
14 Trattamento errori terminato Transizione interna Il modulo terminale viene bloccato
Il motore può girare liberamente
15 Errore eliminato + comando
Fault Reset Fault Reset Bit 7 =
Tacitare l'errore (con fronte di
risalita)
Attenzione
Modulo terminale bloccato…
…significa che i semiconduttori di potenza (transistor) non vengono più azionati. Il motore si spegne in modo incontrollato senza decelerare se questo stato viene accettato quando esso è in funzione. Un freno meccanico eventualmente presente viene azionato automaticamente. Il segnale non garantisce che il motore sia effettivamente diseccitato.
Attenzione
Modulo terminale attivato…
…significa che il motore viene azionato e regolato in funzione del modo operativo scelto. Un freno meccanico eventualmente presente viene sbloccato automaticamente. L'attuatore può reagire in modo incontrollato in caso di difetto o parametrazione errata (corrente del motore, numero di poli, angolo offset del resolver ecc.).
7.1.3 Controlword (parola di comando)
Oggetto 6040h: controlword
Il controlword permette di modificare lo stato corrente del motorcontroller o di attivare
direttamente una determinata azione (ad es. start della corsa di riferimento). La funzione dei bit 4, 5, 6 e 8 dipende dal modo operativo corrente (modes_of_operation) del
motorcontroller (per la descrizione vedi capitolo successivo).

7. Controllo dell'unità (Device Control)
144 Festo P.BE.CMMP-CO-SW-IT 0708NH
Index 6040h
Name controlword
Object Code VAR
Data Type UINT16
Access rw
PDO Mapping yes
Units --
Value Range --
Default Value 0
Bit Valore Funzione
0 0001h
Controllo delle transizioni di stato
(questi bit vengono analizzati insieme)
1 0002h
2 0004h
3 0008h
4 0010h new_set_point / start_homing_operation / enable_ip_mode
5 0020h change_set_immediatly
6 0040h absolute / relative
7 0080h reset_fault
8 0100h Halt
9 0200h reserved – set to 0
10 0400h reserved – set to 0
11 0800h reserved – set to 0
12 1000h reserved – set to 0
13 2000h reserved – set to 0
14 4000h reserved – set to 0
15 8000h reserved – set to 0
Tab. 7 2: Occupazione dei bit del controlword
Come già descritto dettagliatamente, le transizioni di stato possono essere eseguite con i bit 0 … 3. I comandi necessari vengono rappresentati nuovamente in un prospetto. Il comando Fault Reset viene generato tramite un cambio positivo del fronte (da 0 a 1) del
bit 7.

7. Controllo dell'unità (Device Control)
Festo P.BE.CMMP-CO-SW-IT 0708NH 145
Comando Bit 7 Bit 3 Bit 2 Bit 1 Bit 0
0080h 0008h 0004h 0002h 0001h
Shutdown 1 1 0
Switch On 1 1 1
Disable Voltage 0
Quick Stop 0 1
Disable Operation 0 1 1 1
Enable Operation 1 1 1 1
Fault Reset
Tab. 7 3: Prospetto di tutti i comandi (x = non rilevante)
Alcune modifiche di stato richiedono un determinato periodo di tempo, perciò tutte le modifiche attivate dal controlword devonoessere rilette tramite lo statusword. Si può scrivere un altro comando tramite il controlword solo se è possibile leggere lo stato richiesto anche nello statusword.
Qui di seguito vengono descritti i restanti bit del controlword. Alcuni bit hanno un significato diverso a seconda del modo operativo (modes_of_operation), cioè se il
motorcontroller viene ad esempio regolato in funzione della velocità o della coppia.
Bit 4 In funzione dei modes_of_operation
new_set_point Nel Profile Position Mode
Un fronte di risalita segnala al motorcontroller che deve essere assunto un nuovo comando di traslazione. Vedi assolutamente anche capitolo 1.1.
start_homing_operation Nell'Homing Mode
Un fronte di risalita determina lo start della corsa di riferimento parametrata. Un fronte di discesa interrompe anzitempo una corsa di riferimento in svolgimento.
enable_ip_mode Nell'Interpolated Position Mode
Impostare questo bit se bisogna analizzare il record dati di interpolazione. Viene tacitato nello statusword tramite il bit ip_mode_active. Vedi
assolutamente anche capitolo 8.4.

7. Controllo dell'unità (Device Control)
146 Festo P.BE.CMMP-CO-SW-IT 0708NH
Bit 5 change_set_immediatly Solo nel Profile Position Mode
Se questo bit non è impostato, allora viene elaborato – per un nuovo comando di traslazione –
prima un bit eventualmente attivo e solo dopo viene iniziato quello nuovo. Con bit impostato, un posizionamento in svolgimento viene interrotto immediatamente e sostituito con il nuovo comando di traslazione. Vedi assolutamente anche capitolo 1.1.
Bit 6 relative Solo nel Profile Position Mode
Con bit impostato, il motorcontroller occupa la posizione di arrivo (target_position) del
comando di traslazione corrente sulla posizione nominale (position_demand_value) del
regolatore.
Bit 7 reset_fault
Transitando da zero a uno, il motorcontroller cerca di tacitare gli errori presenti, il che riesce
solo se è stata eliminata la causa dell'errore.
Bit 8 In funzione dei modes_of_operation
halt Nel Profile Position Mode
Il posizionamento in corso viene interrotto se il bit è impostato. La decelerazione viene eseguita con il profile_deceleration. Al termine del processo il bit target_reached viene impostato nello statusword. La cancellazione del bit non ha
alcun effetto.
halt Nel Profile Velocity Mode
La velocità viene azzerata con bit impostato. Le decelerazione viene eseguita con il profile_
deceleration. Il motorcontroller accelera
nuovamente cancellando il bit.
halt Nel Profile Torque Mode
La coppia viene azzerata con bit impostato, il che accade con il torque_slope. Il motorcon-
troller accelera nuovamente cancellando il bit.
halt Nell'Homing Mode
La corsa di riferimento in corso viene interrotta se il bit è impostato. La cancellazione del bit non ha alcun effetto.

7. Controllo dell'unità (Device Control)
Festo P.BE.CMMP-CO-SW-IT 0708NH 147
7.1.4 Lettura dello stato del motorcontroller
In modo simile alla combinazione di più bit del controlword che permette di attivare diverse transizioni di stato, quindi combinando diversi bit dello statusword si può rilevare
in quale stato si trova il motorcontroller.
La tabella seguente elenca gli stati possibili del diagramma e la relativa combinazione di bit con la quale vengono visualizzati nello statusword.
Stato Bit 6 Bit 5 Bit 3 Bit 2 Bit 1 Bit 0 Maschera Valore
0040h 0020h 0008h 0004h 0002h 0001h
Not_Ready_To_Switch_On 0 0 0 0 0 004Fh 0000h
Switch_On_Disabled 1 0 0 0 0 004Fh 0040h
Ready_to_Switch_On 0 1 0 0 0 1 006Fh 0021h
Switched_On 0 1 0 0 1 1 006Fh 0023h
OPERATION_ENABLE 0 1 0 1 1 1 006Fh 0027h
QUICK_STOP_ACTIVE 0 0 0 1 1 1 006Fh 0007h
Fault_Reaction_Active 0 1 1 1 1 004Fh 000Fh
Fault 0 1 1 1 1 004Fh 0008h
FAULT (secondo DS402) 1) 0 1 0 0 0 004Fh 0008h
Tab. 7.4: Stato dell'unità (x = non rilevante)
ESEMPIO L'esempio succitato mostra quali bit devono essere impostati nel
controlword per poter abilitare il motorcontroller. Ora si deve leggere
il nuovo stato scritto dallo statusword.
Transizione da SWITCH_ON_DISABLED a OPERATION_ENABLE:
1.) Scrivere la transizione di stato 2 nel controlword
2.) Aspettare finché lo stato READY_TO_SWITCH_ON non viene visualizzato
nello statusword
Transiz. 2: controlword = 0006h Aspettare finché (statusword & 006Fh)
= 0021h *1)
3.) Le transizioni di stato 3 e 4 possono essere scritte a gruppi nel
controlword
4.) Aspettare finché lo stato OPERATION_ENABLE non viene visualizzato
nello statusword
Transiz. 3+4: controlword = 000Fh Aspettare finché (statusword & 006Fh)
= 0027h *1)
Nota
L'esempio parte dal presupposto che nel controlword non siano impostati
altri bit (per le transizioni sono importanti solo i bit 0 … 3).
*1
Per l'identificazione degli stati bisogna analizzare anche bit non
impostati (vedi tabella). Perciò lo statusword deve essere mascherato
in modo appropriato.

7. Controllo dell'unità (Device Control)
148 Festo P.BE.CMMP-CO-SW-IT 0708NH
7.1.5 Statuswords (parole di stato)
Oggetto 6041h: statusword
Index 6041h
Name statusword
Object Code VAR
Data Type UINT16
Access ro
PDO Mapping yes
Units --
Value Range --
Default Value --
Bit Valore Funzione
0 0001h
stato del motorcontroller (vedi Tab. 7.4)
(questi bit vengono analizzati insieme)
1 0002h
2 0004h
3 0008h
4 0010h voltage_enabled
5 0020h stato del motorcontroller (vedi Tab. 7.4)
6 0040h
7 0080h warning
8 0100h drive_is_moving
9 0200h remote
10 0400h target_reached
11 0800h internal_limit_active
12 1000h set_point_acknowledge / speed_0 /
homing_attained / ip_mode_active
13 2000h following_error / homing_error
14 4000h manufacturer_statusbit
15 8000h attuatore con riferimento definito
Tab. 7 5: Occupazione dei bit nello statusword
I bit dello statusword non sono bufferizzati. Rappresentano lo stato corrente dell'unità.

7. Controllo dell'unità (Device Control)
Festo P.BE.CMMP-CO-SW-IT 0708NH 149
Nello statusword vengono visualizzati diversi eventi oltre allo stato del motorcontroller,
cioè ad ogni bit è assegnato un determinato evento, ad es. l'errore di posizionamento. I singoli bit hanno il seguente significato:
Bit 4 voltage_enabled
Questo bit è impostato se i transistor del modulo -terminale sono attivati.
Se nell'oggetto 6510h _ F0h (compatibility_control) è impostato il bit 7, vale (vedi capitolo 6.2):
Questo bit è impostato se i transistor del modulo terminale sono attivati attivati.
Avvertenza
Il motore può essere sotto tensione nonostante un difetto.
Bit 5 quick_stop
Se il bit è cancellato, l'attuatore esegue un Quick Stop secondo quick_stop_option_code.
Bit 7 warning
Questo bit indica che un senso di rotazione è bloccato perché uno dei finecorsa è scattato. L'inibizione del valore nominale viene cancellata nuovamente tacitando l'errore (vedi controlword, fault_reset).
Bit 8 drive_is_moving specifico del costruttore
Questo bit viene impostato – indipendentemente dai modes_of_operation – se la velocità effettiva corrente (velocity_actual_value) dell'attuatore è al di fuori della relativa finestra di tolleranza (velocity_threshold).
Bit 9 remote
Questo bit indica che il modulo terminale del motorcontroller può essere abilitato tramite la rete CAN.
È settato se la logica di abilitazione del regolatore è impostata adeguatamente tramite l'oggetto enable_logic.

7. Controllo dell'unità (Device Control)
150 Festo P.BE.CMMP-CO-SW-IT 0708NH
Bit 10 In funzione dei modes_of_operation
target_reached Nel Profile Position Mode
Il bit viene impostato se la posizione di arrivo corrente è stata raggiunta e la posizione corrente (position_
actual_value) si trova nella finestra parametrata (position_window).
Inoltre viene settato se l'attuatore si arresta quando il bit Halt è impostato.
Viene cancellato non appena viene prestabilito un nuovo arrivo.
target_reached Nel Profile Velocity Mode
Il bit viene impostato se la velocità (velocity_actual_value) dell'attuatore è nella finestra di tolleranza (velocity_window, velocity_
window_time).
Bit 11 internal_limit_active
Questo bit indica che la limitazione I2t è attiva.
Bit 12 In funzione dei modes_of_operation
set_point_
acknowledge
Nel Profile Position Mode
Questo bit viene impostato se il motorcontroller ha identificato il bit settato new_set_point nel controlword. Viene cancellato nuovamente dopo che il bit new_set_point è stato azzerato nel controlword.
Vedi assolutamente anche capitolo 8.3.
speed_0 Nel Profile Velocity Mode
Questo bit viene impostato se la velocità effettiva corrente (velocity_actual_value) dell'attuatore è
nella relativa finestra di tolleranza (velocity_threshold).
homing_attained Nell'Homing Mode
Questo bit viene impostato se la corsa di riferimento è stata ultimata senza errori.

7. Controllo dell'unità (Device Control)
Festo P.BE.CMMP-CO-SW-IT 0708NH 151
ip_mode_active Nell'Interpolated Position Mode
Questo bit indica che l'interpolazione è attiva e che i relativi record di dati vengono analizzati. Viene impostato se ciò è stato richiesto dal bit enable_ip_
mode nel controlword. Vedi assolutamente anche
capitolo 8.4.
Bit 13 In funzione dei modes_of_operation
following_error Nel Profile Position Mode
Questo bit viene impostato se la posizione effettiva corrente (position_actual_value) differisce dalla posizione nominale (position_demand_value) in
modo tale che la differenza è fuori dalla finestra di tolleranza parametrata (following_error_window, following_error_ time_out).
homing_error Nell'Homing Mode
Questo bit viene impostato se la corsa di riferimento viene interrotta (bit Halt), entrambi i finecorsa
reagiscono contemporaneamente o la corsa di ricerca
già eseguita è superiore allo spazio di posizionamento prestabilito (min_position_limit, max_position_
limit).
Bit 14 manufacturer_
statusbit
specifico del costruttore
Il significato di questo bit è configurabile. Può essere impostato se un bit qualsiasi del
manufacturer_statusword_1 viene settato o risettato. Vedi anche capitolo 7.1.5 Oggetto 2000h
Bit 15 trigger_result specifico del costruttore
Il significato di questo bit è configurabile. Viene settato se si è verificato un evento di campionamento e la relativa maschera è impostata in maniera adeguata. Vedi anche capitolo 6.15.
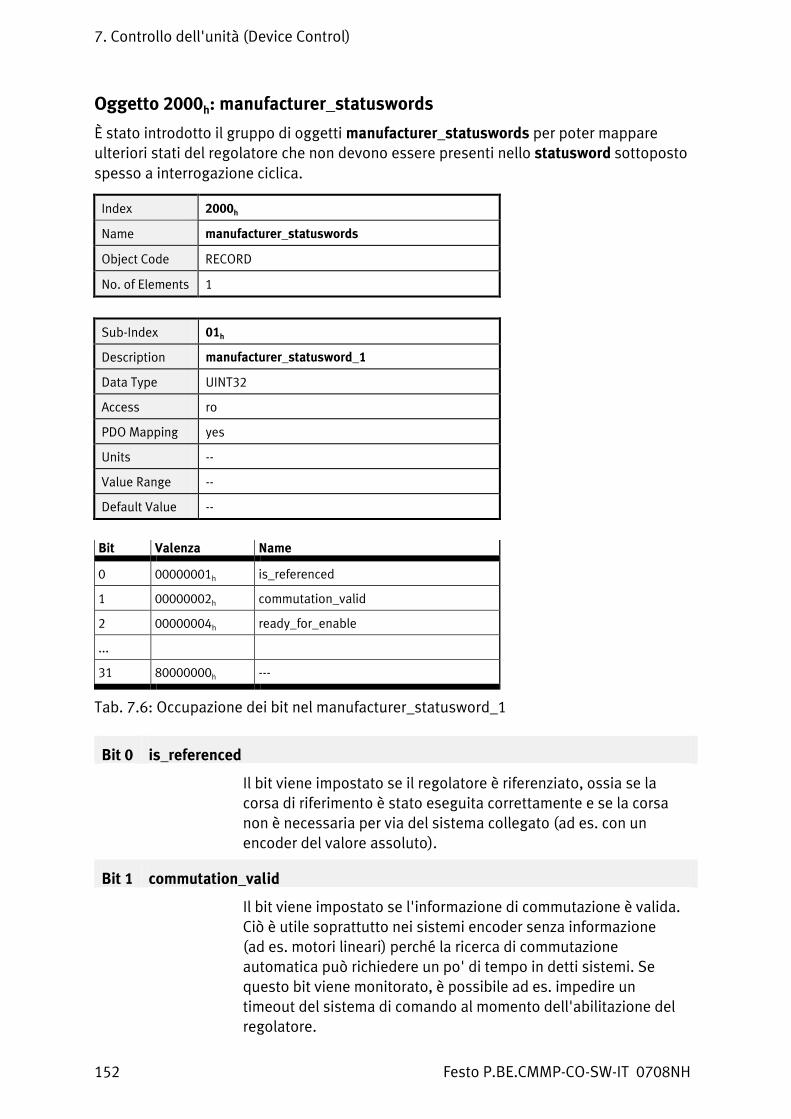
7. Controllo dell'unità (Device Control)
152 Festo P.BE.CMMP-CO-SW-IT 0708NH
Oggetto 2000h: manufacturer_statuswords
È stato introdotto il gruppo di oggetti manufacturer_statuswords per poter mappare ulteriori stati del regolatore che non devono essere presenti nello statusword sottoposto
spesso a interrogazione ciclica.
Index 2000h
Name manufacturer_statuswords
Object Code RECORD
No. of Elements 1
Sub-Index 01h
Description manufacturer_statusword_1
Data Type UINT32
Access ro
PDO Mapping yes
Units --
Value Range --
Default Value --
Bit Valenza Name
0 00000001h is_referenced
1 00000002h commutation_valid
2 00000004h ready_for_enable
...
31 80000000h ---
Tab. 7.6: Occupazione dei bit nel manufacturer_statusword_1
Bit 0 is_referenced
Il bit viene impostato se il regolatore è riferenziato, ossia se la corsa di riferimento è stato eseguita correttamente e se la corsa non è necessaria per via del sistema collegato (ad es. con un encoder del valore assoluto).
Bit 1 commutation_valid
Il bit viene impostato se l'informazione di commutazione è valida. Ciò è utile soprattutto nei sistemi encoder senza informazione (ad es. motori lineari) perché la ricerca di commutazione automatica può richiedere un po' di tempo in detti sistemi. Se questo bit viene monitorato, è possibile ad es. impedire un timeout del sistema di comando al momento dell'abilitazione del regolatore.

7. Controllo dell'unità (Device Control)
Festo P.BE.CMMP-CO-SW-IT 0708NH 153
Bit 2 ready_for_enable
Il bit viene impostato se tutte le condizioni sono realizzate per
abilitare il regolatore e manca solo l'abilitazione del medesimo. Devono essere soddisfatte le condizioni qui riportate:
- L'attuatore è senza errori
- Il circuito intermedio è caricato
- L'analisi del resolver è pronta. Nessun processo è attivo (ad es. trasmissione seriale) che possa impedire l'abilitazione
- Non è attivo alcun processo bloccante (ad es. l'identificazione automatica dei parametri del motore).
Con l'ausilio degli oggetti manufacturer_status_masks e manufacturer_status_invert si possono inserire uno o più bit dei manufacturer_statuswords nel bit 14 (manufacturer_ statusbit) dello statusword (6041h). Tutti i bit del manufacturer_ statusword_1 possono essere invertiti in manufacturer_status_invert_1 tramite il bit corrispondente. Così è possibile monitorare anche i bit sullo stato ‚risettato‛. I bit vengono mascherati dopo l'inversione, cioè il bit viene analizzato solo se il bit corrispondente è impostato in manufacturer_status_mask_1. Se dopo la mascheratura è impostato ancora un bit, allora viene impostato anche il bit 14 dello statusword.
La figura qui visibile schematizza la procedura:
Bit Bit Bit Bit Bit Bit Bit Bit Bit Bit
0 1 1 3 4 … … 27 28 29 30 31
1 1 1 1 0 0 0 0 0 0 manufacturer_status- word_1 2000h_01h
0 0 1 1 0 … … 0 1 1 0 0 manufacturer_status_
invert_1 200Ah_01h = 1 1 0 0 0 … … 0 1 1 0 0
0 1 0 1 0 … … 0 0 1 0 0 manufacturer_status_
mask_1 2005h_01h = 0 1 0 0 0 … … 0 0 1 0 0
oppure
Bit Bit Bit Bit Bit Bit Bit Bit Bit Bit Bit Bit Bit Bit Bit Bit
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
X X X X X X X X X X X X X X 1 X statusword 6041h_00h

7. Controllo dell'unità (Device Control)
154 Festo P.BE.CMMP-CO-SW-IT 0708NH
ESEMPIO
A) Il bit 14 dello statusword deve essere impostato se
l'attuatore è riferenziato. L'attuatore riferenziato è il bit 0 del manufacturer_statusword_1
manufacturer_status_invert = 0x00000000 manufacturer_status_mask = 0x00000001 (bit 0)
B) Il bit 14 dello statusword deve essere impostato se
l'attuatore non ha una posizione di commutazione valida
La posizione di commutazione valida è il bit 1 del
manufacturer_statusword_1
Questo bit deve essere invertito in modo che venga
impostato se l'informazione di commutazione non è valida:
manufacturer_status_invert = 0x00000002 (bit 1)
manufacturer_status_mask = 0x00000002 (bit 1)
C) Il bit 14 dello statusword deve essere impostato se
l'attuatore non è pronto per l'abilitazione O se esso è
riferenziato
La posizione di commutazione valida è il bit 2 del
manufacturer_statusword_1
L'attuatore riferenziato è il bit 0. Il bit 2 deve essere
invertito in modo che venga impostato se l'attuatore non
è pronto per l'abilitazione:
manufacturer_status_invert = 0x00000004 (bit 2)
manufacturer_status_mask = 0x00000005 (bit 2, bit 0)
Oggetto 2005h: manufacturer_status_masks
Questo gruppo di oggetti permette di definire quali bit impostati dei manufacturer_
statuswords vengono inseriti nello statusword. Vedi anche capitolo 7.1.5.
Index 2005h
Name manufacturer_status_masks
Object Code RECORD
No. of Elements 1
Sub-Index 01h
Description manufacturer_status_mask_1
Data Type UINT32
Access rw
PDO Mapping yes
Units --
Value Range --
Default Value 0x00000000

7. Controllo dell'unità (Device Control)
Festo P.BE.CMMP-CO-SW-IT 0708NH 155
Oggetto 200Ah: manufacturer_status_invert
Questo gruppo di oggetti permette di definire quali bit dei manufacturer_statuswords
vengono inseriti invertiti nello statusword. Vedi anche capitolo 7.1.5.
Index 200Ah
Name manufacturer_status_invert
Object Code RECORD
No. of
Elements 1
Sub-Index 01h
Description manufacturer_status_invert_1
Data Type UINT32
Access rw
PDO Mapping yes
Units --
Value Range --
Default Value 0x00000000
7.1.6 Descrizione di altri oggetti
Oggetti trattati in questo capitolo
Index Oggetto Name Tipo Attr.
605Bh VAR shutdown_option_code INT16 rw
605Ch VAR disable_operation_option_code INT16 rw
605Ah VAR quick_stop_option_code INT16 rw
605Eh VAR fault_reaction_option_code INT16 rw

7. Controllo dell'unità (Device Control)
156 Festo P.BE.CMMP-CO-SW-IT 0708NH
Oggetto 605Bh: shutdown_option_code
Con l'oggetto shutdown_option_code viene prestabilità la reazione del motorcontroller durante la transizione di stato 8 (da OPERATION ENABLE a READY TO SWITCH ON).
L'oggetto mostra la reazione implementata del motorcontroller. Non è possibile apportare modifiche.
Index 605Bh
Name shutdown_option_code
Object Code VAR
Data Type INT16
Access rw
PDO Mapping no
Units --
Value Range 0
Default Value 0
Valore Significato
0 il modulo terminale viene disattivato, il motore può girare
liberamente
Oggetto 605Ch: disable_operation_option_code
Con l'oggetto disable_operation_option_code viene prestabilita la reazione del motorcontroller durante la transazione di stato 5 (da OPERATION ENABLE a SWITCHED
ON). L'oggetto mostra la reazione implementata del motorcontroller. Non è possibile
apportare modifiche.
Index 605Ch
Name disable_operation_option_code
Object Code VAR
Data Type INT16
Access rw
PDO Mapping no
Units --
Value Range -1
Default Value -1
Valore Significato
-1 freni con quickstop_deceleration

7. Controllo dell'unità (Device Control)
Festo P.BE.CMMP-CO-SW-IT 0708NH 157
Oggetto 605Ah: quick_stop_option_code
Con il parametro quick_stop_option_code viene prestabilita la reazione del motorcontroller in caso di Quick Stop. L'oggetto mostra la reazione implementata del
motorcontroller. Non è possibile apportare modifiche.
Index 605Ah
Name quick_stop_option_code
Object Code VAR
Data Type INT16
Access rw
PDO Mapping no
Units --
Value Range 2
Default Value 2
Valore Significato
2 freni con quickstop_deceleration
Oggetto 605Eh: fault_reaction_option_code
Con l'oggetto fault_reaction_option_code viene prestabilita la reazione del motorcontroller in caso di errore (fault). Nella serie CMMP la reazione dipende dal
rispettivo errore, perciò non è possibile parametrare questo oggetto, il quale restituisce sempre 0. Per cambiare la reazione ai singoli errori vedi capitolo 6.18
Gestione degli errori.
Index 605Eh
Name fault_reaction_option_code
Object Code VAR
Data Type INT16
Access rw
PDO Mapping no
Units --
Value Range 0
Default Value 0

8. Modi operativi
158 Festo P.BE.CMMP-CO-SW-IT 0708NH
8. Modi operativi
8.1 Impostazione del modo operativo
8.1.1 Panoramica
Il motorcontroller può essere settato su numerosi modo operativi. Solo alcuni sono specificati dettagliatamente sotto CANopen:
- esercizio a coppia regolata - profile torque mode
- esercizio a velocità regolata - profile velocity mode
- corsa di riferimento - homing mode
- processo di posizionamento - profile position mode
- impostazione sincrona della posizione - interpolated position mode
8.1.2 Descrizione degli oggetti
Oggetti trattati in questo capitolo
Index Oggetto Name Tipo Attr.
6060h VAR modes_of_operation INT8 wo
6061h VAR modes_of_operation_display INT8 ro
Oggetto 6060h: modes_of_operation
L'oggetto modes_of_operation permette di impostare il modo operativo del
motorcontroller.
Index 6060h
Name modes_of_operation
Object Code VAR
Data Type INT8
Access rw
PDO Mapping yes
Units --
Value Range 1, 3, 4, 6, 7
Default Value --

8. Modi operativi
Festo P.BE.CMMP-CO-SW-IT 0708NH 159
Valore Significato
1 Profile Position Mode (regolatore di posizione con esercizio di posizionamento)
3 Profile Velocity Mode (regolatore di velocità con rampa del valore nominale)
4 Torque Profile Mode (regolatore di coppia con rampa del valore nominale)
6 Homing Mode (corsa di riferimento)
7 Interpolated Position Mode
Il modo operativo corrente può essere letto solo nell'oggetto modes_of_operation_display!
Un cambio del modo operativo può richiedere un po' di tempo, perciò bisogna aspettare finché il nuovo modo selezionato non appare nell'oggetto modes_of_operation_display.
Oggetto 6061h: modes_of_operation_display
Nell'oggetto modes_of_operation_display si può leggere il modo operativo corrente del motorcontroller. Impostando un modo operativo tramite l'oggetto 6060h, allora vengono
eseguiti - oltre al modo operativo vero e proprio - anche gli inserimenti del valore nominale (selettori del valore nominale), che sono necessari per il funzionamento del motorcontroller sotto CANopen. Questi sono:
Selettore Profile Velocity Mode Profile Torque Mode
A valore nominale della velocità (fieldbus 1) valore nominale della coppia (fieldbus 1)
B eventualmente limitazione della coppia non attivato
C valore nominale della velocità (sincrona) non attivato
Inoltre viene attivata sempre la rampa del valore nominale. Uno dei modi operativi CANopen viene restituito solo se questi inserimenti sono stati impostati nel modo summenzionato. Se ad esempio queste impostazioni vengono modificate con il software di parametrazione, allora viene restituito un relativo modo operativo ‚User‛ per indicare che i selettori sono stati modificati.
Index 6061h
Name modes_of_operation_display
Object Code VAR
Data Type INT8
Access ro
PDO Mapping yes
Units --
Value Range vedi tabella
Default Value 3

8. Modi operativi
160 Festo P.BE.CMMP-CO-SW-IT 0708NH
Valore Significato
-1 Modo operativo non noto / cambio del modo operativo
-11 User Position Mode
-13 User Velocity Mode
-14 User Torque Mode
1 Profile Position Mode (regolatore di posizione con esercizio di posizionamento)
3 Profile Velocity Mode (regolatore di velocità con rampa del valore nominale)
4 Torque Profile Mode (regolatore di coppia con rampa del valore nominale)
6 Homing Mode (corsa di riferimento)
7 Interpolated Position Mode
Il modo operativo può essere impostato solo tramite l'oggetto modes_of_operation. Un cambio del modo operativo può richiedere un po' di tempo, perciò bisogna aspettare finché il nuovo modo selezionato non appare nell'oggetto modes_of_operation_ display. Durante questo intervallo può apparire brevemente ‚modo operativo non valido‛ (-1).
8.2 Modo operativo corsa di riferimento (Homing Mode)
8.2.1 Panoramica
In questo capitolo viene descritta la ricerca della posizione iniziale da parte del motor- controller (chiamati anche punto base, punto di riferimento o punto zero). Esistono diversi metodi per determinare questa posizione, ossia utilizzare dei finecorsa alla fine del campo di posizionamento oppure un interruttore di riferimento (interruttore del punto zero) all'interno del percorso di traslazione possibile. Per realizzare una riproducibilità possibilmente elevata, si può includere l'impulso zero del resolver utilizzato (encoder incrementale ecc.) per alcuni metodi.
Fig. 8.1: Corsa di riferimento
L'utilizzatore può determinare la velocità, l'accelerazione e il tipo di corsa di riferimento. Con l'oggetto home_offset si può spostare la posizione zero dell'attuatore su un punto
qualsiasi.

8. Modi operativi
Festo P.BE.CMMP-CO-SW-IT 0708NH 161
Esistono due velocità della corsa di riferimento. La velocità di ricerca più elevata (speed_during_search_for_switch) viene utilizzata per trovare il finecorsa o l'interruttore
di riferimento. Poi per poter determinare esattamente la posizione del relativo fronte di commutazione, si passa alla velocità lentissima (speed_during_search_for_zero).
Se l'attuatore non deve essere riferenziato nuovamente ma bisogna impostare solo la posizione su un valore assegnato, allora si può utilizzare l'oggetto 2030h (set_position_
absolute). Vedi Oggetto 2030h: set_position_absolute a pagina 101.
In genere sotto CANopen la corsa sulla posizione zero non è parte integrante della corsa di riferimento. Se al motorcontroller sono note tutte le grandezze necessarie (ad es. perché conosce già la posizione dell'impulso zero), allora non viene eseguito alcun movimento fisico.
Questa reazione può essere modificata tramite l'oggetto 6510h_F0h
(compatibility_control, vedi capitolo 6.2), così viene eseguita sempre una corsa su zero.
8.2.2 Descrizione degli oggetti
Oggetti trattati in questo capitolo
Index Oggetto Name Tipo Attr.
607Ch VAR home_offset INT32 rw
6098h VAR homing_method INT8 rw
6099h ARRAY homing_speeds UINT32 rw
609Ah VAR homing_acceleration UINT32 rw
2045h VAR homing_timeout UINT16 rw
Oggetti trattati in altri capitoli
Index Oggetto Name Tipo Capitolo
6040h VAR controlword UINT16 7.1.3 Controlword (parola di comando)
6041h VAR statusword UINT16 7.1.5 Statusword (parola di stato)

8. Modi operativi
162 Festo P.BE.CMMP-CO-SW-IT 0708NH
Oggetto 607Ch: home_offset
L'oggetto home_offset definisce lo spostamento della posizione zero rispetto alla
posizione di riferimento determinata.
Home
Position
home_offset
Zero
Position
Fig. 8.2: Home Offset
Index 607Ch
Name home_offset
Object Code VAR
Data Type INT32
Access rw
PDO Mapping yes
Units position units
Value Range --
Default Value 0
Oggetto 6098h: homing_method
Per la corsa di riferimento è disponibile una serie di metodi diversi. Tramite l'oggetto homing_method si può selezionare la variante richiesta per l'applicazione. Per la corsa di
riferimento sono possibili 4 segnali: il finecorsa negativo e positivo, l'interruttore di riferimento e l'impulso zero (periodico) del resolver. Inoltre il motorcontroller è in grado di riferenziarsi completamente sulla battuta negativa o positiva senza segnale supplementare. Se tramite l'oggetto homing_method viene determinato un metodo di
riferenziamento, allora eseguire le seguenti impostazioni:
- l'origine di riferimento (finecorsa negativo/positivo, interruttore di riferimento, battuta negativa/positiva)
- la direzione e lo svolgimento della corsa di riferimento
- il tipo di analisi dell'impulso zero del resolver utilizzato.
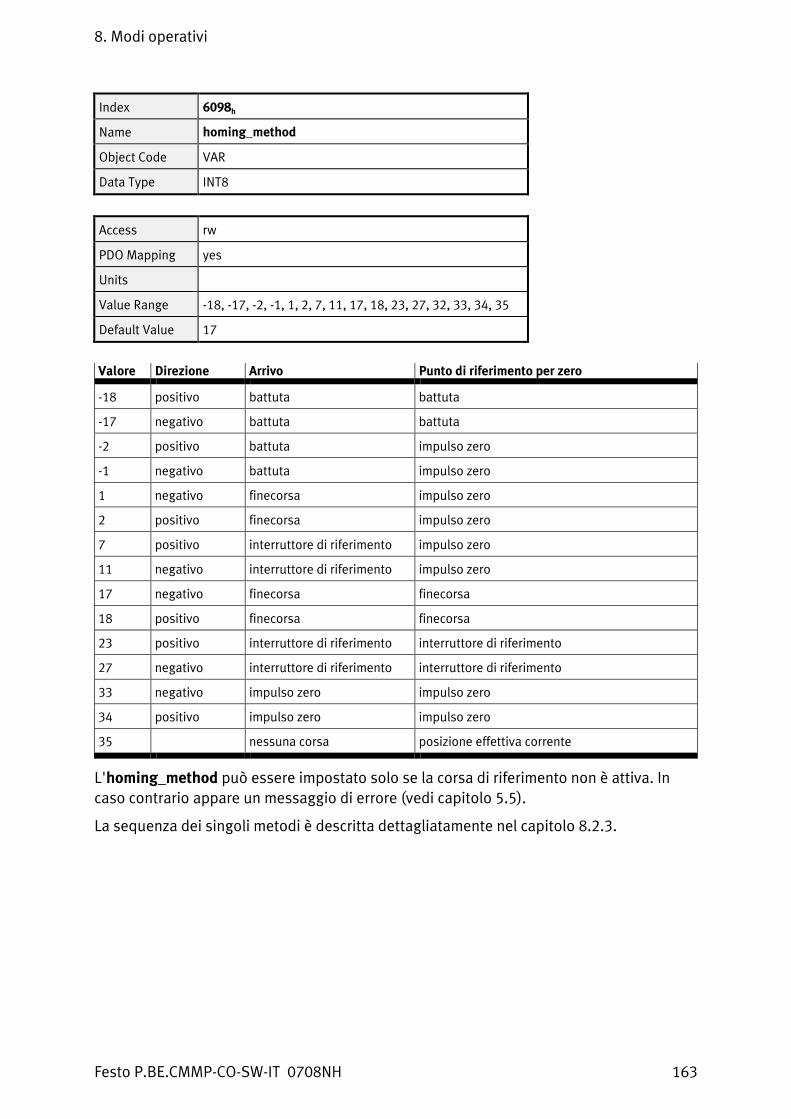
8. Modi operativi
Festo P.BE.CMMP-CO-SW-IT 0708NH 163
Index 6098h
Name homing_method
Object Code VAR
Data Type INT8
Access rw
PDO Mapping yes
Units
Value Range -18, -17, -2, -1, 1, 2, 7, 11, 17, 18, 23, 27, 32, 33, 34, 35
Default Value 17
Valore Direzione Arrivo Punto di riferimento per zero
-18 positivo battuta battuta
-17 negativo battuta battuta
-2 positivo battuta impulso zero
-1 negativo battuta impulso zero
1 negativo finecorsa impulso zero
2 positivo finecorsa impulso zero
7 positivo interruttore di riferimento impulso zero
11 negativo interruttore di riferimento impulso zero
17 negativo finecorsa finecorsa
18 positivo finecorsa finecorsa
23 positivo interruttore di riferimento interruttore di riferimento
27 negativo interruttore di riferimento interruttore di riferimento
33 negativo impulso zero impulso zero
34 positivo impulso zero impulso zero
35 nessuna corsa posizione effettiva corrente
L'homing_method può essere impostato solo se la corsa di riferimento non è attiva. In
caso contrario appare un messaggio di errore (vedi capitolo 5.5).
La sequenza dei singoli metodi è descritta dettagliatamente nel capitolo 8.2.3.

8. Modi operativi
164 Festo P.BE.CMMP-CO-SW-IT 0708NH
Oggetto 6099h: homing_speeds
Questo oggetto determina le velocità che vengono utilizzate durante la corsa di riferimento.
Index 6099h
Name homing_speeds
Object Code ARRAY
No. of Elements 2
Data Type UINT32
Sub-Index 01h
Description speed_during_search_for_switch
Access rw
PDO Mapping yes
Units speed units
Value Range --
Default Value 100 min-1
Sub-Index 02h
Description speed_during_search_for_zero
Access rw
PDO Mapping yes
Units speed units
Value Range --
Default Value 10 min-1
Impostando il bit 6 nell'oggetto compatibility_control (vedi capitolo 6.2) viene eseguita una corsa su zero dopo la corsa di riferimento.
Se questo bit è impostato e l'oggetto speed_during_search_for_switch viene descritto, allora vengono descritte sia la velocità per la ricerca dell'interruttore sia la velocità per la corsa sullo zero.

8. Modi operativi
Festo P.BE.CMMP-CO-SW-IT 0708NH 165
Oggetto 609Ah: homing_acceleration
L'oggetto homing_acceleration definisce l'accelerazione che viene utilizzata durante la
corsa di riferimento per tutti i processi di accelerazione e decelerazione.
Index 609Ah
Name homing_acceleration
Object Code VAR
Data Type UINT32
Access rw
PDO Mapping yes
Units acceleration units
Value Range --
Default Value 1.000 min-1/s
Oggetto 2045h: homing_timeout
La corsa di riferimento può essere monitorata su un tempo di esecuzione massimo. Perciò specificare il tempo di esecuzione massimo con l'oggetto homing_timeout. Viene attivato
l'errore 11-3 se questo tempo viene superato senza aver terminato la corsa di riferimento.
Index 2045h
Name homing_timeout
Object Code VAR
Data Type UINT16
Access rw
PDO Mapping no
Units ms
Value Range 0 (off), 1 … 65535
Default Value 60000

8. Modi operativi
166 Festo P.BE.CMMP-CO-SW-IT 0708NH
8.2.3 Sequenze della corsa di riferimento
I diversi metodi della corsa di riferimento sono rappresentati nelle figure seguenti. I numeri circoscritti corrispondono al codice da immettere nell'oggetto homing_method.
Metodo 1: finecorsa negativo con analisi dell'impulso zero
In questo metodo l'attuatore trasla a velocità relativamente elevata in direzione negativa finché non raggiunge il finecorsa. Questo processo viene rappresentato nel diagramma mediante il fronte di risalita. Poi l'attuatore retrocede lentamente e cerca la posizione esatta del finecorsa. La posizione zero si riferisce al primo impulso zero del resolver in direzione positiva dal finecorsa.
Fig. 8.3: Corsa di riferimento sul finecorsa negativo con analisi dell'impulso zero
Metodo 2: finecorsa positivo con analisi dell'impulso zero
In questo metodo l'attuatore trasla a velocità relativamente elevata in direzione positiva finché non raggiunge il finecorsa. Questo processo viene rappresentato nel diagramma mediante il fronte di risalita. Poi l'attuatore retrocede lentamente e cerca la posizione esatta del finecorsa. La posizione zero si riferisce al primo impulso zero del resolver in direzione negativa dal finecorsa.
Fig. 8.4: Corsa di riferimento sul finecorsa positivo con analisi dell'impulso zero

8. Modi operativi
Festo P.BE.CMMP-CO-SW-IT 0708NH 167
Metodi 7 e 11: interruttore di riferimento e analisi dell'impulso zero
Questi due metodi utilizzano l'interruttore di riferimento che è attivo solo su una parte del percorso. Questi metodi di riferimento vengono utilizzati soprattutto per le applicazioni
con assi rotanti laddove l'interruttore viene attivato una volta ogni giro.
Con i metodi 7 e 11 l'attuatore tralsa rispettivamente in direzione positiva e poi in direzione negativa. In funzione della direzione di traslazione, la posizione zero si riferisce al primo impulso zero in direzione negativa o positiva dell'interruttore di riferimento. Questa procedura è visibile nelle due figure seguenti.
Fig. 8.5: Corsa di riferimento sull'interruttore con analisi dell'impulso zero per movimento iniziale positivo
Nelle corse di riferimento sull'interruttore, la funzione dei finecorsa consiste nell'invertire la direzione di ricerca. Viene attivato un errore se poi viene raggiunto il finecorsa antistante.
Fig. 8.6: Corsa di riferimento sull'interruttore con analisi dell'impulso zero per movimento iniziale negativo

8. Modi operativi
168 Festo P.BE.CMMP-CO-SW-IT 0708NH
Metodo 17: corsa di riferimento su finecorsa negativo
In questo metodo l'attuatore trasla a velocità relativamente elevata in direzione negativa finché non raggiunge il finecorsa. Questo processo viene rappresentato nel diagramma
mediante il fronte di risalita. Poi l'attuatore retrocede lentamente e cerca la posizione esatta del finecorsa. La posizione zero si riferisce al fronte di discesa del finecorsa negativo.
Fig. 8.7: Corsa di riferimento su finecorsa negativo
Metodo 18: corsa di riferimento su finecorsa positivo
In questo metodo l'attuatore trasla a velocità relativamente elevata in direzione positiva finché non raggiunge il finecorsa. Questo processo viene rappresentato nel diagramma mediante il fronte di risalita. Poi l'attuatore retrocede lentamente e cerca la posizione
esatta del finecorsa. La posizione zero si riferisce al fronte di discesa del finecorsa positivo.
Fig. 8.8: Corsa di riferimento su finecorsa positivo
Metodi 23 e 27: corsa di riferimento su interruttore
Questi due metodi utilizzano l'interruttore di riferimento che è attivo solo su una parte del percorso. Questi metodi di riferimento vengono utilizzati soprattutto per le applicazioni con assi rotanti laddove l'interruttore viene attivato una volta ogni giro.
Con i metodi 23 e 27 l'attuatore tralsa rispettivamente in direzione positiva e poi in direzione negativa. La posizione zero si riferisce al fronte dell'interruttore di riferimento. Questa procedura è visibile nelle due figure seguenti.

8. Modi operativi
Festo P.BE.CMMP-CO-SW-IT 0708NH 169
Fig. 8.9: Corsa di riferimento su interruttore per movimento iniziale positivo
Nelle corse di riferimento sull'interruttore, la funzione dei finecorsa consiste nell'invertire la direzione di ricerca. Viene attivato un errore se poi viene raggiunto il finecorsa antistante.
Fig. 8.10: Corsa di riferimento su interruttore per movimento iniziale negativo
Metodo -1: battuta negativa con analisi dell'impulso zero
In questo metodo l'attuatore trasla in direzione negativa finché non raggiunge la battuta. Durante questo processo l'elemento integrale I2t del motore aumenta a massimo il 90 %. La battuta deve essere dimensionata meccanicamente in modo che non venga danneggiata quando la corrente parametrata è massima. La posizione zero si riferisce al primo impulso zero del resolver in direzione positiva dalla battuta.
Fig. 8.11: Corsa di riferimento su battuta negativa con analisi dell'impulso zero

8. Modi operativi
170 Festo P.BE.CMMP-CO-SW-IT 0708NH
Metodo -2: battuta positiva con analisi dell'impulso zero
In questo metodo l'attuatore trasla in direzione positiva finché non raggiunge la battuta. Durante questo processo l'elemento integrale I2t del motore aumenta a massimo il 90 %.
La battuta deve essere dimensionata meccanicamente in modo che non venga danneggiata quando la corrente parametrata è massima. La posizione zero si riferisce al primo impulso zero del resolver in direzione negativa dalla battuta.
Fig. 8.12: Corsa di riferimento su battuta positiva con analisi dell'impulso zero
Metodo -17: corsa di riferimento su battuta negativa
In questo metodo l'attuatore trasla in direzione negativa finché non raggiunge la battuta. Durante questo processo l'elemento integrale I2t del motore aumenta a massimo il 90 %. La battuta deve essere dimensionata meccanicamente in modo che non venga danneggiata quando la corrente parametrata è massima. La posizione zero si riferisce
direttamente alla battuta.
Fig. 8.13: Corsa di riferimento su battuta negativa
Metodo -18: corsa di riferimento su battuta positiva
In questo metodo l'attuatore trasla in direzione positiva finché non raggiunge la battuta. Durante questo processo l'elemento integrale I2t del motore aumenta a massimo il 90 %. La battuta deve essere dimensionata meccanicamente in modo che non venga danneggiata quando la corrente parametrata è massima. La posizione zero si riferisce direttamente alla battuta.
Fig. 8.14: Corsa di riferimento su battuta positiva
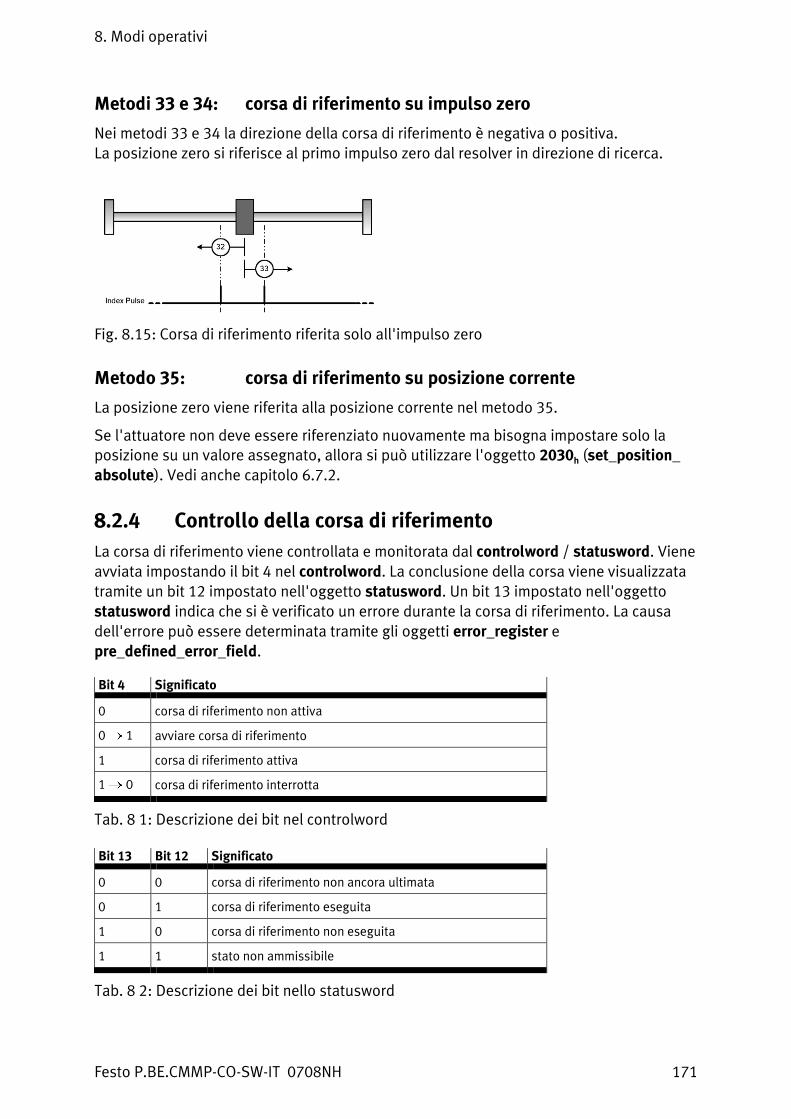
8. Modi operativi
Festo P.BE.CMMP-CO-SW-IT 0708NH 171
Metodi 33 e 34: corsa di riferimento su impulso zero
Nei metodi 33 e 34 la direzione della corsa di riferimento è negativa o positiva. La posizione zero si riferisce al primo impulso zero dal resolver in direzione di ricerca.
Fig. 8.15: Corsa di riferimento riferita solo all'impulso zero
Metodo 35: corsa di riferimento su posizione corrente
La posizione zero viene riferita alla posizione corrente nel metodo 35.
Se l'attuatore non deve essere riferenziato nuovamente ma bisogna impostare solo la posizione su un valore assegnato, allora si può utilizzare l'oggetto 2030h (set_position_
absolute). Vedi anche capitolo 6.7.2.
8.2.4 Controllo della corsa di riferimento
La corsa di riferimento viene controllata e monitorata dal controlword / statusword. Viene avviata impostando il bit 4 nel controlword. La conclusione della corsa viene visualizzata tramite un bit 12 impostato nell'oggetto statusword. Un bit 13 impostato nell'oggetto statusword indica che si è verificato un errore durante la corsa di riferimento. La causa dell'errore può essere determinata tramite gli oggetti error_register e pre_defined_error_field.
Bit 4 Significato
0 corsa di riferimento non attiva
0 1 avviare corsa di riferimento
1 corsa di riferimento attiva
1 0 corsa di riferimento interrotta
Tab. 8 1: Descrizione dei bit nel controlword
Bit 13 Bit 12 Significato
0 0 corsa di riferimento non ancora ultimata
0 1 corsa di riferimento eseguita
1 0 corsa di riferimento non eseguita
1 1 stato non ammissibile
Tab. 8 2: Descrizione dei bit nello statusword

8. Modi operativi
172 Festo P.BE.CMMP-CO-SW-IT 0708NH
8.3 Modo operativo posizionamento (Profile Position Mode)
8.3.1 Panoramica
La struttura di questo modo operativo è visibile in Fig. 8.16. La posizione di arrivo (target_position) viene trasferita al generatore di curve di traslazione, che genera un valore nominale (position_demand_value) per il regolatore di
posizione descritto nel capitolo 6.7 (Position Control Function). Questi due blocchi di funzioni possono essere impostati indipendentemente l'uno dall'altro.
TrajectoryGenerator
PositionControl
Function
LimitFunction
Multiplier position
target_position607Ah
position_demand_value(60FDh)
control_effort(60FAh)
[position units]target_position
(607Ah)
Trajectory Generator
Parameters
Position Control Law Parameters
position_factor(6093h)polarity (607Eh)
position_range_limit(607Bh)
software_position_limit (607Dh)
home_offset(607Ch)
Fig. 8.16: Generatore di curve di traslazione e regolatore di posizione
Tutte le grandezze d'ingresso del generatore vengono convertite nelle unità interne con le grandezze dei Factor-Group (vedi capitolo 6.3). Le grandezze interne vengono contrassegnate con un asterisco e in genere non sono necessarie per l'utente.
8.3.2 Descrizione degli oggetti
Oggetti trattati in questo capitolo
Index Oggetto Name Tipo Attr.
607Ah VAR target_position INT32 rw
6081h VAR profile_velocity UINT32 rw
6082h VAR end_velocity UINT32 rw
6083h VAR profile_acceleration UINT32 rw
6084h VAR profile_deceleration UINT32 rw
6085h VAR quick_stop_deceleration UINT32 rw
6086h VAR motion_profile_type INT16 rw

8. Modi operativi
Festo P.BE.CMMP-CO-SW-IT 0708NH 173
Oggetti trattati in altri capitoli
Index Oggetto Name Tipo Capitolo
6040h VAR controlword INT16 7.1.3 Controlword (parola di comando)
6041h VAR statusword UINT16 7.1.5 Statusword (parola di stato)
605Ah VAR quick_stop_option_code INT16 7.1.6 Descrizione di altri oggetti
607Eh VAR polarity UINT8 6.3 Fattori di conversione
6093h ARRAY position_factor UINT32 6.3 Fattori di conversione
6094h ARRAY velocity_encoder_factor UINT32 6.3 Fattori di conversione
6097h ARRAY acceleration_factor UINT32 6.3 Fattori di conversione
Oggetto 607Ah: target_position
L'oggetto target_position permette di determinare su quale posizione deve traslare il
motorcontroller. Bisogna contemplare anche l'impostazione corrente della velocità, accelerazione, ritardo di decelerazione e tipo di profilo di traslazione (motion_profile_type) ecc. La posizione di arrivo (target_position) viene interpretata come dato assoluto e relativo (controlword, bit 6).
Index 607Ah
Name target_position
Object Code VAR
Data Type INT32
Access rw
PDO Mapping yes
Units position units
Value Range --
Default Value 0

8. Modi operativi
174 Festo P.BE.CMMP-CO-SW-IT 0708NH
Oggetto 6081h: profile_velocity
L'oggetto profile_velocity indica la velocità che in genere viene raggiunta alla fine della rampa di accelerazione durante il posizionamento. L'oggetto profile_velocity viene
specificato in ‚speed units‛.
Index 6081h
Name profile_velocity
Object Code VAR
Data Type UINT32
Access rw
PDO Mapping yes
Units speed_units
Value Range --
Default Value 1000
Oggetto 6082h: end_velocity
L'oggetto end_velocity definisce la velocità che l'attuatore deve avere quando raggiunge
la posizione di arrivo (target_position). Normalmente questo oggetto deve essere
impostato su zero in modo che il motorcontroller si arresti nel momento in cui raggiunge la posizione di arrivo (target_position). Per realizzare posizionamenti perfetti, si può assegnare una velocità che differisce da zero. L'oggetto end_velocity viene specificato nelle stesse unità dell'oggetto profile_velocity.
Index 6082h
Name end_velocity
Object Code VAR
Data Type UINT32
Access rw
PDO Mapping yes
Units speed units
Value Range --
Default Value 0

8. Modi operativi
Festo P.BE.CMMP-CO-SW-IT 0708NH 175
Oggetto 6083h: profile_acceleration
L'oggetto profile_acceleration specifica l'accelerazione con cui si accelera sul valore
nominale. Viene specificato in unità di accelerazione definite dall'utente (acceleration
units) (vedi capitolo 6.3 Factor Group).
Index 6083h
Name profile_acceleration
Object Code VAR
Data Type UINT32
Access rw
PDO Mapping yes
Units acceleration units
Value Range --
Default Value 10000 min-1/s
Oggetto 6084h: profile_deceleration
L'oggetto profile_deceleration specifica l'accelerazione con cui si decelera.
Viene specificato in unità di accelerazione definite dall'utente (acceleration units) (vedi capitolo 6.3 Factor Group).
Index 6084h
Name profile_deceleration
Object Code VAR
Data Type UINT32
Access rw
PDO Mapping yes
Units acceleration units
Value Range --
Default Value 10000 min-1/s

8. Modi operativi
176 Festo P.BE.CMMP-CO-SW-IT 0708NH
Oggetto 6085h: quick_stop_deceleration
L'oggetto quick_stop_deceleration specifica il ritardo di decelerazione con cui il motore si arresta se viene eseguito un Quick Stop (vedi capitolo 7). L'oggetto quick_stop_
deceleration viene specificato nella stessa unità dell'oggetto profile_deceleration.
Index 6085h
Name quick_stop_deceleration
Object Code VAR
Data Type UINT32
Access rw
PDO Mapping yes
Units acceleration units
Value Range --
Default Value 14100 min-1/s
Oggetto 6086h: motion_profile_type
L'oggetto motion_profile_type viene utilizzato per selezionare il tipo del profilo di
posizionamento.
Index 6086h
Name motion_profile_type
Object Code VAR
Data Type INT16
Access rw
PDO Mapping yes
Units --
Value Range 0, 2
Default Value 0
Valore Forma di curva
0 rampa lineare
2 rampa senza strappi

8. Modi operativi
Festo P.BE.CMMP-CO-SW-IT 0708NH 177
8.3.3 Descrizione del funzionamento
Sono possibili due metodi per trasferire una posizione di arrivo al motorcontroller.
Comando di traslazione semplice
Una volta raggiunta la posizione di arrivo, il motorcontroller segnala questo stato all'host con il bit target_reached (bit 10 nell'oggetto statusword). In questo modo operativo il
motorcontroller si arresta quando ha raggiunto la destinazione.
Sequenza di comandi di traslazione
Raggiunta una destinazione, il motorcontroller inizia immediatamente ad avvicinarsi a quella successiva. Questo transizione può avvenire in modo scorrevole senza che esso si arresti nel frattempo.
Questi due metodi vengono controllati tramite i bit new_set_point e change_set_immediatly nell'oggetto controlword e set_point_acknowledge nell'oggetto statusword. Questi bit sono in un rapporto domanda-risposta l'uno rispetto all'altro. Così
è possibile preparare un comando di traslazione mentre l'altro è ancora attivo.
Fig. 8.17: Trasferimento del comando di traslazione da un host
In Fig. 8.17 è visibile come l'host e il motorcontroller possono intercomunicare tramite il CAN-Bus.
Prima vengono trasmessi i dati di posizionamento (posizione di arrivo, velocità di traslazione, velocità finale e accelerazione) al motorcontroller. Una volta scritto completamente il record di dati (1), l'host può avviare il posizionamento impostando il bit new_set_point nel controlword su ‚1‛ (2). Dopo che il motorcontroller ha identificato e
trasferito i nuovi dati nel buffer, esso segnala questa condizione all'host impostando il bit set_point_acknowledge nello statusword (3).
Poi l'host può iniziare a scrivere un nuovo record di dati di posizionamento nel motorcontroller (4) e cancellare nuovamente il bit new_set_point (5). Solo se il
motorcontroller è in grado di accettare un nuovo comando di traslazione (6), esso segnala questo stato mediante uno ‚0‛ nel bit set_point_acknowledge. L'host non può avviare
anticipatamente un nuovo posizionamento (7).

8. Modi operativi
178 Festo P.BE.CMMP-CO-SW-IT 0708NH
In Fig. 8.18 viene avviato un nuovo posizionamento solo dopo aver ultimato completamente quello precedente. A questo scopo l'host analizza il bit target_reached nell'oggetto statusword.
Fig. 8.18: Comando di traslazione semplice
In Fig. 8.19 viene già avviato un nuovo posizionamento, mentre quello precedente è ancora in elaborazione. A questo scopo l'host trasmette la destinazione successiva al motorcontroller se questo segnala, cancellando il bit set_point_acknowledge, che esso
ha letto il buffer e avviato il relativo posizionamento. In questo modo i posizionamenti si
susseguono senza interruzione. Per far sì che il motorcontroller non debba decelerare ogni volta brevemente a zero fra due posizionamenti, si consiglia di scrivere l'oggetto end_velocity con lo stesso valore dell'oggetto profile_velocity per questo modo
operativo.
Fig. 8.19: Sequenza perfetta di comandi di traslazione
Se nel controlword viene impostato, oltre al bit new_set_point, anche il bit change_set_immediately su ‚1‛, allora l'host ordina al motorcontroller di iniziare
immediatamente il nuovo comando di traslazione. In questo caso un comando di traslazione in elaborazione viene interrotto.
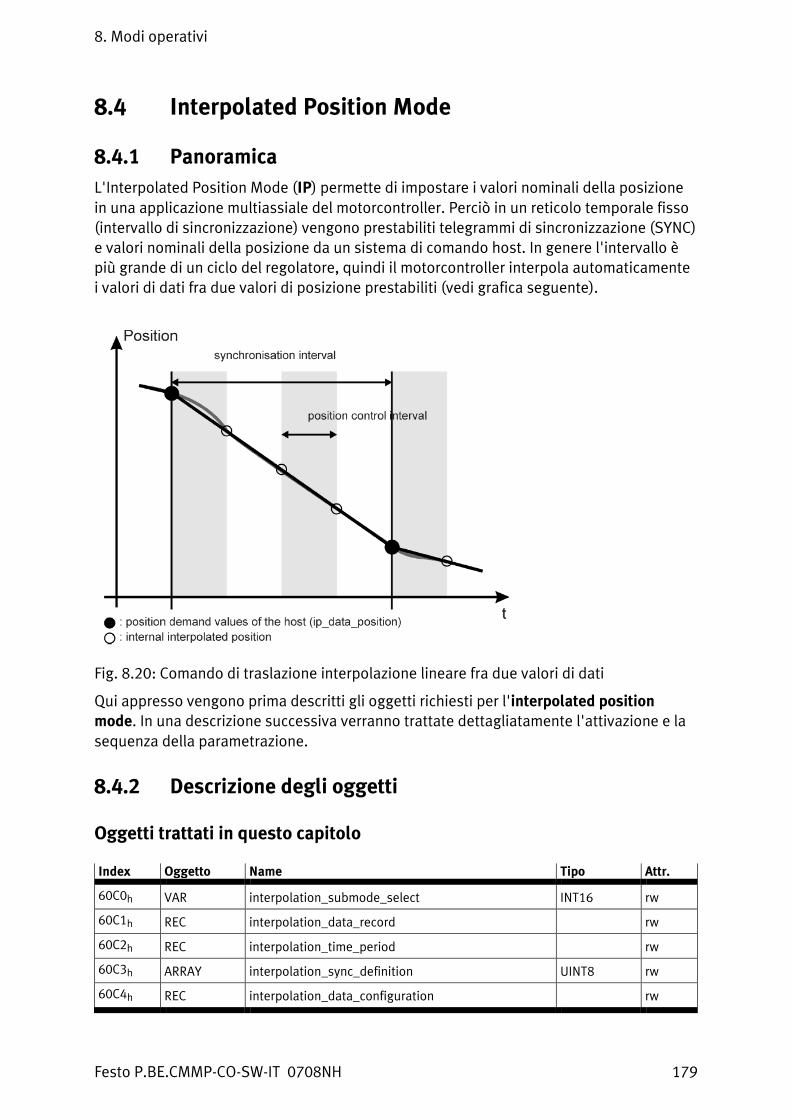
8. Modi operativi
Festo P.BE.CMMP-CO-SW-IT 0708NH 179
8.4 Interpolated Position Mode
8.4.1 Panoramica
L'Interpolated Position Mode (IP) permette di impostare i valori nominali della posizione
in una applicazione multiassiale del motorcontroller. Perciò in un reticolo temporale fisso (intervallo di sincronizzazione) vengono prestabiliti telegrammi di sincronizzazione (SYNC) e valori nominali della posizione da un sistema di comando host. In genere l'intervallo è più grande di un ciclo del regolatore, quindi il motorcontroller interpola automaticamente i valori di dati fra due valori di posizione prestabiliti (vedi grafica seguente).
Fig. 8.20: Comando di traslazione interpolazione lineare fra due valori di dati
Qui appresso vengono prima descritti gli oggetti richiesti per l'interpolated position
mode. In una descrizione successiva verranno trattate dettagliatamente l'attivazione e la
sequenza della parametrazione.
8.4.2 Descrizione degli oggetti
Oggetti trattati in questo capitolo
Index Oggetto Name Tipo Attr.
60C0h VAR interpolation_submode_select INT16 rw
60C1h REC interpolation_data_record rw
60C2h REC interpolation_time_period rw
60C3h ARRAY interpolation_sync_definition UINT8 rw
60C4h REC interpolation_data_configuration rw

8. Modi operativi
180 Festo P.BE.CMMP-CO-SW-IT 0708NH
Oggetti trattati in altri capitoli
Index Oggetto Name Tipo Capitolo
6040h VAR controlword INT16 7.1.3 Controlword (parola di comando)
6041h VAR statusword UINT16 7.1.5 Statusword (parola di stato)
6093h ARRAY position_factor UINT32 0 Fattori di conversione
6094h ARRAY velocity_encoder_factor UINT32 0 Fattori di conversione
6097h ARRAY acceleration_factor UINT32 0 Fattori di conversione
Oggetto 60C0h: interpolation_submode_select
Tramite l'oggetto interpolation_submode_select viene definito il tipo di interpolazione.
Attualmente è disponibile solo la variante specifica del costruttore ‚Interpolazione lineare senza buffer‛.
Index 60C0h
Name interpolation_submode_select
Object Code VAR
Data Type INT16
Access rw
PDO Mapping yes
Units --
Value Range -2
Default Value -2
Valore Tipo di interpolazione
-2 interpolazione lineare senza buffer
Oggetto 60C1h: interpolation_data_record
Il record di oggetti interpolation_data_record rappresenta il record di dati vero e proprio. È formato da una voce per il valore di posizione (ip_data_position) e da una parola di controllo (ip_data_controlword), che specifica se il valore di posizione deve essere
interpretato in modo assoluto o relativo. L’indicazione della parola di controllo è
facoltativa. Se non specificata, allora il valore di posizione viene interpretato come assoluto. Se anche la parola di controllo deve essere specificata, scrivere - per motivi dovuti alla consistenza dei dati - prima il subindice 2 (ip_data_controlword) e poi il subindice 1 (ip_data_position) perché internamente viene attivato il trasferimento di dati con accesso di scrittura a ip_data_position.

8. Modi operativi
Festo P.BE.CMMP-CO-SW-IT 0708NH 181
Index 60C1h
Name interpolation_data_record
Object Code RECORD
No. of Elements 2
Sub-Index 01h
Description ip_data_position
Data Type INT32
Access rw
PDO Mapping yes
Units position units
Value Range --
Default Value --
Sub-Index 02h
Description ip_data_controlword
Data Type UINT8
Access rw
PDO Mapping yes
Units --
Value Range 0, 1
Default Value 0
Valore ip_data_position ist
0 posizione assoluta
1 distanza relativa
Il trasferimento di dati interno viene attivato con l'accesso di scrittura al subindice 1. Inoltre scrivere il subindice 2 – se utilizzato – prima del subindice 1.
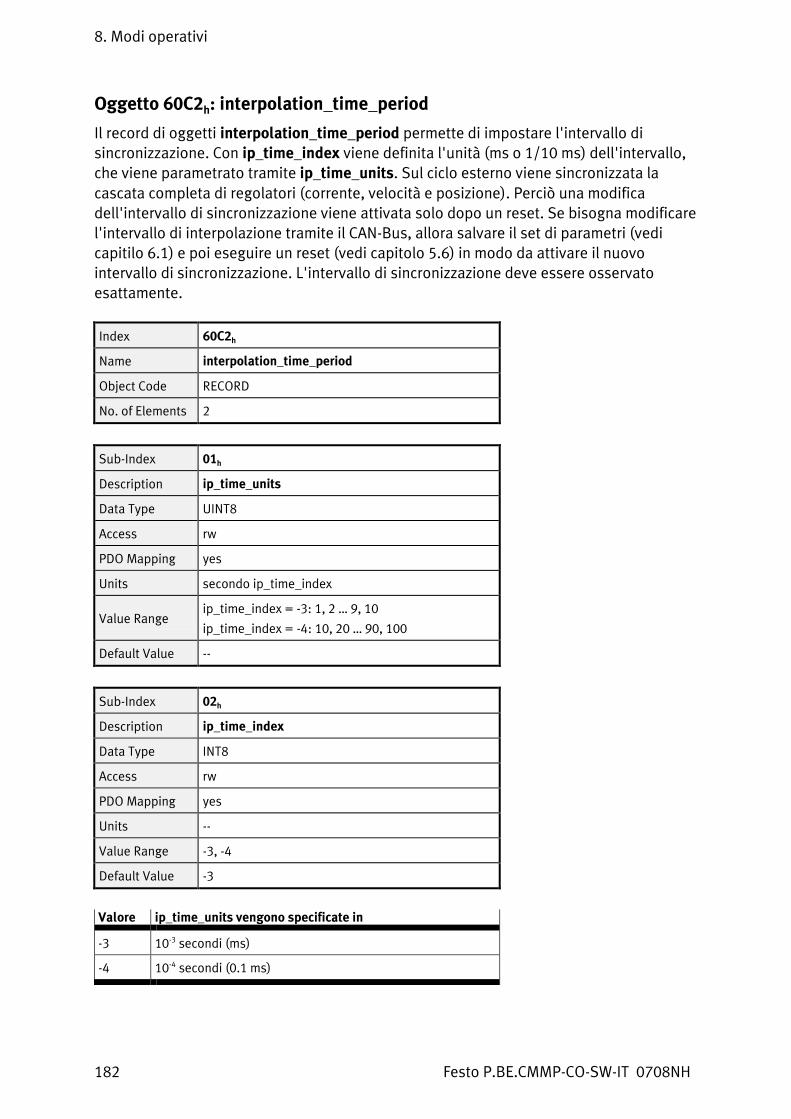
8. Modi operativi
182 Festo P.BE.CMMP-CO-SW-IT 0708NH
Oggetto 60C2h: interpolation_time_period
Il record di oggetti interpolation_time_period permette di impostare l'intervallo di sincronizzazione. Con ip_time_index viene definita l'unità (ms o 1/10 ms) dell'intervallo,
che viene parametrato tramite ip_time_units. Sul ciclo esterno viene sincronizzata la
cascata completa di regolatori (corrente, velocità e posizione). Perciò una modifica dell'intervallo di sincronizzazione viene attivata solo dopo un reset. Se bisogna modificare l'intervallo di interpolazione tramite il CAN-Bus, allora salvare il set di parametri (vedi capitilo 6.1) e poi eseguire un reset (vedi capitolo 5.6) in modo da attivare il nuovo intervallo di sincronizzazione. L'intervallo di sincronizzazione deve essere osservato esattamente.
Index 60C2h
Name interpolation_time_period
Object Code RECORD
No. of Elements 2
Sub-Index 01h
Description ip_time_units
Data Type UINT8
Access rw
PDO Mapping yes
Units secondo ip_time_index
Value Range ip_time_index = -3: 1, 2 … 9, 10
ip_time_index = -4: 10, 20 … 90, 100
Default Value --
Sub-Index 02h
Description ip_time_index
Data Type INT8
Access rw
PDO Mapping yes
Units --
Value Range -3, -4
Default Value -3
Valore ip_time_units vengono specificate in
-3 10-3 secondi (ms)
-4 10-4 secondi (0.1 ms)

8. Modi operativi
Festo P.BE.CMMP-CO-SW-IT 0708NH 183
Una modifica dell'intervallo di sincronizzazione viene attivata solo dopo un reset. Se bisogna modificare l'intervallo di interpolazione tramite il CAN-Bus, salvare il set di parametri e poi eseguire un reset.
Oggetto 60C3h: interpolation_sync_definition
Tramite l'oggetto interpolation_sync_definition vengono prestabiliti il tipo (synchronize_on_group) e il numero (ip_sync_every_n_event) di telegrammi per ogni
intervallo di sincronizzazione. Per la serie CMMP si può impostare solo il telegramma SYNC standard e 1 SYNC per ogni intervallo.
Index 60C3h
Name interpolation_sync_definition
Object Code ARRAY
No. of Elements 2
Data Type UINT8
Sub-Index 01h
Description syncronize_on_group
Access rw
PDO Mapping yes
Units --
Value Range 0
Default Value 0
Valore Significato
0 utilizzare il telegramma SYNC standard
Sub-Index 02h
Description ip_sync_every_n_event
Access rw
PDO Mapping yes
Units --
Value Range 1
Default Value 1

8. Modi operativi
184 Festo P.BE.CMMP-CO-SW-IT 0708NH
Oggetto 60C4h: interpolation_data_configuration
Il record oggetti interpolation_data_configuration permette di configurare il tipo (buffer_organisation) e la grandezza (max_buffer_size, actual_buffer_size) di un buffer
eventualmente presente nonché l'accesso a questo (buffer_position, buffer_clear). La grandezza di un elemento buffer può essere letta tramite l'oggetto size_of_data_record.
Sebbene nel tipo di ‚interpolazione lineare senza buffer‛ non è presente alcun buffer, anche in questo caso bisogna abilitare l'accesso tramite questo oggetto buffer_clear.
Index 60C4h
Name interpolation_data_configuration
Object Code RECORD
No. of Elements 6
Sub-Index 01h
Description max_buffer_size
Data Type UINT32
Access ro
PDO Mapping no
Units --
Value Range 0
Default Value 0
Sub-Index 02h
Description actual_size
Data Type UINT32
Access rw
PDO Mapping yes
Units --
Value Range 0 … max_buffer_size
Default Value 0
Sub-Index 03h
Description buffer_organisation
Data Type UINT8
Access rw
PDO Mapping yes
Units --
Value Range 0
Default Value 0

8. Modi operativi
Festo P.BE.CMMP-CO-SW-IT 0708NH 185
Valore Significato
0 FIFO
Sub-Index 04h
Description buffer_position
Data Type UINT16
Access rw
PDO Mapping yes
Units --
Value Range 0
Default Value 0
Sub-Index 05h
Description size_of_data_record
Data Type UINT8
Access wo
PDO Mapping yes
Units --
Value Range 2
Default Value 2
Sub-Index 06h
Description buffer_clear
Data Type UINT8
Access wo
PDO Mapping yes
Units --
Value Range 0, 1
Default Value 0
Valore Significato
0 cancellare buffer / accesso a 60C1h non permesso
1 accesso a 60C1h abilitato

8. Modi operativi
186 Festo P.BE.CMMP-CO-SW-IT 0708NH
8.4.3 Descrizione del funzionamento
Parametrazione preliminare
Bisogna eseguire diverse impostazioni prima che il motorcontroller possa essere commutato nel modo operativo interpolated position mode. Fra queste vengono annoverati l'impostazione dell'intervallo di interpolazione (interpolation_time_period), cioè il tempo fra due telegrammi SYNC, il tipo di interpolazione (interpolation_
submode_select) e il tipo di sincronizzazione (interpolation_sync_definition). Inoltre occorre abilitare l'accesso al buffer di posizione tramite l'oggetto buffer_clear.
ESEMPIO
Funzione Oggetto CAN / COB
Tipo di
interpolazione
-2 60C0h, interpolation_submode_select = -2
Unità di tempo 0,1 ms 60C2h_02h, interpolation_time_index = -04
Intervallo di tempo 4 ms 60C2h_01h, interpolation_time_units = 40
Salvare parametri 1010h_01h, save_all_parameters
Eseguire reset NMT reset node
Aspettare Bootup messaggio Bootup
Abilitazione buffer 1 60C4h_06h, buffer_clear = 1
Generare SYNC SYNC (reticolo 4 ms)
Attivazione dell'Interpolated Position Mode e sincronizzazione
L'IP viene attivato tramite l'oggetto modes_of_operation (6060h). A partire da questo
momento il motorcontroller cerca di sincronizzarsi sul reticolo temporale esterno, che viene prestabilito tramite i telegrammi SYNC. Se il motorcontroller è riuscito a sincro-nizzarsi, allora esso segnala il modo operativo interpolated position mode nell'oggetto modes_of_operation_display (6061h). Durante la sincronizzazione il motorcontroller segnala modo operativo non valido (-1). Se dopo la sincronizzazione i telegrammi SYNC non vengono trasmessi nel reticolo temporale corretto, il motorcontroller ritorna al modo
operativo non valido.
Il trasferimento dei dati di posizione all'attuatore può iniziare se il modo operativo è stato acquisito. A questo proposito il sistema di comando host legge opportunamente la posizione effettiva corrente dal regolatore e poi la scrive ciclicamente come nuovo valore nominale (interpolation_data_record) nel motorcontroller. Il trasferimento dei dati viene attivato dal motorcontroller tramit i bit Handshake del controlword e dello statusword.
Impostando il bit enable_ip_mode nel controlword, l'host indica che si deve iniziare con
l'analisi dei dati di posizione. I record di dati vengono analizzati solo se il motorcontroller esegue la tacitazione tramite il bit di stato ip_mode_selected nello statusword.
Perciò si ottengono dettagliatamente l'assegnazione e la sequenza qui riportate:

8. Modi operativi
Festo P.BE.CMMP-CO-SW-IT 0708NH 187
Fig. 8.21: Sincronizzazione e abilitazione dei dati
Nr. Evento Oggetto CAN
1 generare messaggi SYNC
2 richiesta del modo operativo ip: 6060h, modes_of_operation = 07
3 aspettare finché modo operativo acquisito 6061h, modes_of_operation_display = 07
4 lettura della posizione effettiva corrente 6064h, position_actual_value
5 riscrittura come posizione nominale corrente 60C1h_01h, ip_data_position
6 start dell'interpolazione 6040h, controlword, enable_ip_mode
7 tacitazione tramite motorcontroller 6041h, statusword, ip_mode_active
8 modifica della posizione nominale corrente secondo
traiettoria
60C1h_01h, ip_data_position
Al termine del processo di traslazione sincrono si può impedire un'ulteriore analisi dei dati di posizione cancellando il bit enable_ip_mode. Poi si può eventualmente passare ad un
altro modo operativo.
8. Modi operativi
188 Festo P.BE.CMMP-CO-SW-IT 0708NH
Interruzione dell'interpolazione in caso di errore
Se una interpolazione in svolgimento (ip_mode_active impostato) viene interrotta a causa
di una anomalia del controller, l'attuatore reagisce dapprima come è stato specificato per
i singoli errori (ad es. eliminazione dell'abilitazione del regolatore e passaggio allo stato SWICTH_ON_DISABLED).
Poi l'interpolazione può essere proseguita solo eseguendo una nuova sincronizzazione perché bisogna riportare il motorcontroller nello stato OPERATION_ENABLE, per cui il bit ip_mode_active viene cancellato.
8.5 Modo operativo regolazione della velocità (Profile Velocity Mode)
8.5.1 Panoramica
Il funzionamento a velocità regolata (Profile Velocity Mode) include le sottofunzioni qui elencate:
- Generazione del valore nominale tramite generatore di rampe
- Rilevamento della velocità tramite resolver mediante differenziazione
- Regolazione della velocità con segnali di input/output appropriati
- Limitazione del valore nominale di coppia (torque_demand_value)
- Monitoraggio della velocità effettiva (velocity_actual_value) con funzione a
finestra/soglia
Il significato dei seguenti parametri è descritto nel capitolo ‚Posizionamento‛ (Profile Position Mode): profile_acceleration, profile_deceleration, quick_stop.

8. Modi operativi
Festo P.BE.CMMP-CO-SW-IT 0708NH 189
Fig. 8.22: Struttura del funzionamento a velocità regolata (Profile Velocity Mode)

8. Modi operativi
190 Festo P.BE.CMMP-CO-SW-IT 0708NH
8.5.2 Descrizione degli oggetti
Oggetti trattati in questo capitolo
Index Oggetto Name Tipo Attr.
6069h VAR velocity_sensor_actual_value INT32 ro
606Ah VAR sensor_selection_code INT16 rw
606Bh VAR velocity_demand_value INT32 ro
202Eh VAR velocity_demand_sync_value INT32 ro
606Ch VAR velocity_actual_value INT32 ro
606Dh VAR velocity_window UINT16 rw
606Eh VAR velocity_window_time UINT16 rw
606Fh VAR velocity_threshold UINT16 rw
6080h VAR max_motor_speed UINT32 rw
60FFh VAR target_velocity INT32 rw
Oggetti trattati in altri capitoli
Index Oggetto Name Tipo Capitolo
6040h VAR controlword INT16 7.1.3 Controlword (parola di comando)
6041h VAR statusword UINT16 7.1.5 Statusword (parola di stato)
6063h VAR position_actual_value* INT32 6.7 Regolatore di posizione
6071h VAR target_torque INT16 8.7 Regolatore di coppia
6072h VAR max_torque_value UINT16 8.7 Regolatore di coppia
607Eh VAR polarity UINT8 6.3 Fattori di conversione
6083h VAR profile_acceleration UINT32 1.1 Posizionamento
6084h VAR profile_deceleration UINT32 1.1 Posizionamento
6085h VAR quick_stop_deceleration UINT32 1.1 Posizionamento
6086h VAR motion_profile_type INT16 1.1 Posizionamento
6094h ARRAY velocity_encoder_factor UINT32 6.3 Fattori di conversione

8. Modi operativi
Festo P.BE.CMMP-CO-SW-IT 0708NH 191
Oggetto 6069h: velocity_sensor_actual_value
L'oggetto velocity_sensor_actual_value permette di leggere il valore di un eventuale
trasduttore di velocità in unità interne. Per la serie CMMP si può collegare un trasduttore
separato. Perciò per determinare il valore effettivo della velocità, utilizzare sempre l'oggetto 606Ch.
Index 6069h
Name velocity_sensor_actual_value
Object Code VAR
Data Type INT32
Access ro
PDO Mapping yes
Units U / 4096 min
Value Range --
Default Value --
Oggetto 606Ah: sensor_selection_code
Con questo oggetto si può selezionare il sensore di velocità. Attualmente non è previsto un sensore separato. Perciò si può selezionare solo il resolver standard.
Index 606Ah
Name sensor_selection_code
Object Code VAR
Data Type INT16
Access rw
PDO Mapping yes
Units --
Value Range 0
Default Value 0
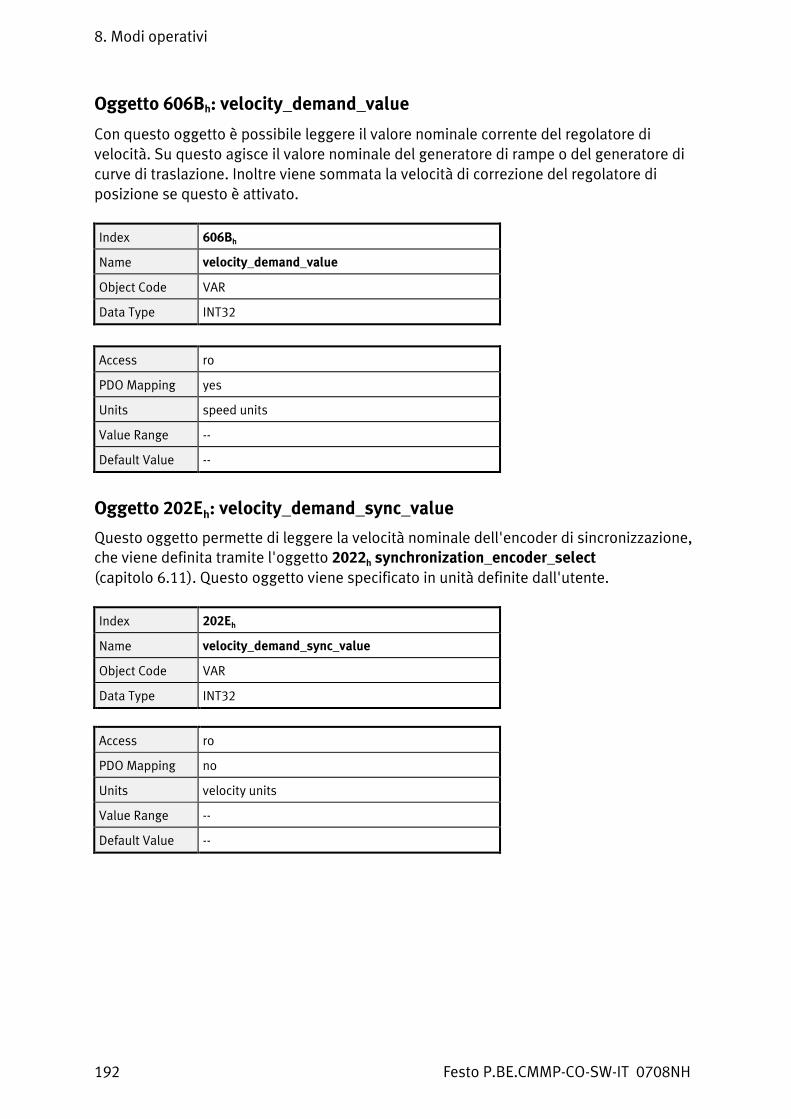
8. Modi operativi
192 Festo P.BE.CMMP-CO-SW-IT 0708NH
Oggetto 606Bh: velocity_demand_value
Con questo oggetto è possibile leggere il valore nominale corrente del regolatore di velocità. Su questo agisce il valore nominale del generatore di rampe o del generatore di
curve di traslazione. Inoltre viene sommata la velocità di correzione del regolatore di posizione se questo è attivato.
Index 606Bh
Name velocity_demand_value
Object Code VAR
Data Type INT32
Access ro
PDO Mapping yes
Units speed units
Value Range --
Default Value --
Oggetto 202Eh: velocity_demand_sync_value
Questo oggetto permette di leggere la velocità nominale dell'encoder di sincronizzazione, che viene definita tramite l'oggetto 2022h synchronization_encoder_select
(capitolo 6.11). Questo oggetto viene specificato in unità definite dall'utente.
Index 202Eh
Name velocity_demand_sync_value
Object Code VAR
Data Type INT32
Access ro
PDO Mapping no
Units velocity units
Value Range --
Default Value --

8. Modi operativi
Festo P.BE.CMMP-CO-SW-IT 0708NH 193
Oggetto 606Ch: velocity_actual_value
L'oggetto velocity_actual_value permette di leggere il valore effettivo della velocità.
Index 606Ch
Name velocity_actual_value
Object Code VAR
Data Type INT32
Access ro
PDO Mapping yes
Units speed units
Value Range --
Default Value --
Oggetto 2074h: velocity_actual_value_filtered
L'oggetto velocity_actual_value_filtered permette di leggere il valore effettivo filtrato
della velocità, che però deve essere utilizzato solo per scopi di visualizzazione. Contrariamente
al velocity_actual_value il velocity_actual_value_filtered non viene utilizzato per la
regolazione bensì per la protezione contro la rotazione del regolatore. La costante di tempo del filtro può essere impostata tramite l'oggetto 2073h
(velocity_display_filter_time). Vedi capitolo 6.6.2 Oggetto 2073h.
Index 2074h
Name velocity_actual_value_filtered
Object Code VAR
Data Type INT32
Access ro
PDO Mapping yes
Units speed units
Value Range --
Default Value --

8. Modi operativi
194 Festo P.BE.CMMP-CO-SW-IT 0708NH
Filter
Filter
[speed units]velocity_actual_value
(606Ch)
[speed units]velocity_actual_value_filtered
(2074h)
velocity_display_filter_time(2073h)
velocity_control_filter_time(60F9h_04h)
internal velocity value
Fig. 8.23: Determinazione di velocity_actual_value e velocity_actual_value_filtered
Oggetto 606Dh: velocity_window
L'oggetto velocity_window serve per impostare il comparatore della finestra, che confronta il valore effettivo della velocità con la velocità finale prestabilita (Objekt 60FFh: target_velocity). Se la differenza di una determinata durata è inferiore a quella qui specificata, allora il bit 10 target_reached viene impostato nell'oggetto statusword.
Vedi anche: oggetto 606Eh (velocity_window_time).
Index 606Dh
Name velocity_window
Object Code VAR
Data Type UINT16
Access rw
PDO Mapping yes
Units speed units
Value Range 0 … 65536 min-1
Default Value 4 min-1

8. Modi operativi
Festo P.BE.CMMP-CO-SW-IT 0708NH 195
Oggetto 606Eh: velocity_window_time
L'oggetto velocity_window_time serve, oltre all'oggetto 606Dh: velocity_window, per
impostare il comparatore della finestra. Per il tempo qui specificato, la velocità deve essere entro la velocity_window in modo che venga impostato il bit 10 target_reached nell'oggetto statusword.
Index 606Eh
Name velocity_window_time
Object Code VAR
Data Type UINT16
Access rw
PDO Mapping yes
Units ms
Value Range 0 … 4999
Default Value 0
Oggetto 606Fh: velocity_threshold
L'oggetto velocity_threshold specifica da quale valore effettivo della velocità l'attuatore
viene considerato ‚fermo‛. Se l'attuatore supera per un determinato tempo il valore di velocità prestabilito, allora nello statusword viene cancellato il bit 12 (velocity = 0). Il tempo viene determinato tramite l'oggetto velocity_threshold_time.
Index 606Fh
Name velocity_threshold
Object Code VAR
Data Type UINT16
Access rw
PDO Mapping yes
Units speed units
Value Range 0 … 65536 min-1
Default Value 10

8. Modi operativi
196 Festo P.BE.CMMP-CO-SW-IT 0708NH
Oggetto 6070h: velocity_threshold_time
L'oggetto velocity_threshold_time specifica quanto tempo l'attuatore può superare il valore di velocità prestabilito prima che nello statusword venga cancellato il bit 12
(velocity = 0).
Index 6070h
Name velocity_threshold_time
Object Code VAR
Data Type UINT16
Access rw
PDO Mapping yes
Units ms
Value Range 0 … 4999
Default Value 0
Oggetto 6080h: max_motor_speed
L'oggetto max_motor_speed specifica la velocità max. ammissibile per il motore in min-1.
L'oggetto viene utilizzato per proteggere il motore ed è riportato nel relativo foglio dati. Il valore nominale della velocità viene limitato a questo valore.
Index 6080h
Name max_motor_speed
Object Code VAR
Data Type UINT16
Access rw
PDO Mapping yes
Units min-1
Value Range 0 … 32768 min-1
Default Value 32768 min-1

8. Modi operativi
Festo P.BE.CMMP-CO-SW-IT 0708NH 197
Oggetto 60FFh: target_velocity
L'oggetto target_velocity è l'impostazione del valore nominale per il generatore di rampe.
Index 60FFh
Name target_velocity
Object Code VAR
Data Type INT32
Access rw
PDO Mapping yes
Units speed units
Value Range --
Default Value --
8.6 Rampe di velocità
Se viene selezionato come modes_of_operation profile_velocity_mode, allora viene
selezionata anche la rampa del valore nominale. Così è possibile limitare, tramite gli oggetti profile_acceleration e profile_deceleration, una modifica a forma di salto del
valore nominale a determinate variazioni di velocità/tempo. Il regolatore permette di specificare non solo diverse accelerazioni per decelerazioni e accelerazioni ma di distinguere anche fra velocità positiva e negativa. La figura qui visibile schematizza il comportamento:
v
t
2090_02 velocity_acceleration_pos
2090_04 velocity_acceleration_neg
IN
OUT
2090_05 velocity_deceleration_neg
2090_03 velocity_deceleration_pos
Fig. 8.24: Rampe di velocità
È disponibile il gruppo di oggetti velocity_ramps per poter parametrare singolarmente queste 4 accelerazioni. Tenere presente che gli oggetti profile_acceleration e profile_deceleration modificano le medesime accelerazioni interne, come le velocity_ramps.

8. Modi operativi
198 Festo P.BE.CMMP-CO-SW-IT 0708NH
Scrivendo il profile_acceleration, le velocity_acceleration_pos e velocity_
acceleration_neg vengono modificate insieme, scrivendo il profile_deceleration, le velocity_deceleration_pos e velocity_deceleration_neg vengono modificate insieme. L'oggetto velocity_ramps_enable permette di definire se i valori nominali devono essere
gestiti tramite il generatore di rampe o meno.
Index 2090h
Name velocity_ramps
Object Code RECORD
No. of Elements 5
Sub-Index 01h
Description velocity_ramps_enable
Data Type UINT8
Access rw
PDO Mapping no
Units ..
Value Range 0: valore nominale NON tramite il generatore di
rampe
1: valore nominale tramite il generatore di rampe
Default Value 1
Sub-Index 02h
Description velocity_acceleration_pos
Data Type INT32
Access rw
PDO Mapping no
Units acceleration units
Value Range ..
Default Value 14100 min-1/s
Sub-Index 03h
Description velocity_deceleration_pos
Data Type INT32
Access rw
PDO Mapping no
Units acceleration units
Value Range ..
Default Value 14100 min-1/s

8. Modi operativi
Festo P.BE.CMMP-CO-SW-IT 0708NH 199
Sub-Index 04h
Description velocity_acceleration_neg
Data Type INT32
Access rw
PDO Mapping no
Units acceleration units
Value Range ..
Default Value 14100 min-1/s
Sub-Index 05h
Description velocity_deceleration_neg
Data Type INT32
Access rw
PDO Mapping no
Units acceleration units
Value Range --
Default Value 14100 min-1/s

8. Modi operativi
200 Festo P.BE.CMMP-CO-SW-IT 0708NH
8.7 Modo operativo regolazione della coppia (Profile Torque Mode)
8.7.1 Panoramica
Questo capitolo descrive il funzionamento a coppia regolata. Questo modo operativo permette di assegnare al motorcontroller un valore nominale di coppia esterno target_torque, che può essere compensato mediante il generatore di rampe incorporato.
Così è possibile impiegare questo motorcontroller anche per i comandi numerici di contornatura in cui il regolatore di posizione ed anche il regolatore di velocità sono situati su un calcolatore esterno.
Fig. 8.25: Struttura del funzionamento a coppia regolata

8. Modi operativi
Festo P.BE.CMMP-CO-SW-IT 0708NH 201
Per il generatore bisogna prestabilire i parametri ‚pendenza di rampa‛ torque_slope e ‚forma di rampa‛ torque_profile_type.
Se nel controlword viene impostato il bit 8 halt, allora il generatore di rampe abbassa la
coppia fino a zero, e la riporta nuovamente sulla coppia nominale target_torque se il bit 8
viene cancellato. In entrambi i casi il generatore contempla la pendenza di rampa torque_slope e la forma di rampa torque_profile_type.
Tutte le definizioni riportate in questo documento si riferiscono a motori rotanti. Se invece vengono utilizzati motori lineari, allora tutti gli oggetti di ‚coppia‛ devono riferirsi ad una ‚forza‛. Per motivi di semplicità gli oggetti non sono rappresentati due volte e i loro nomi non dovrebbero essere cambiati.
I modi operativi ‚esercizio di posizionamento‛ (Profile Position Mode) e ‚regolatore di velocità‛ (Profile Velocity Mode) richiedono il regolatore di coppia per garantire il loro funzionamento. Perciò bisogna sempre parametrare questo regolatore.
8.7.2 Descrizione degli oggetti
Oggetti trattati in questo capitolo
Index Oggetto Name Tipo Attr.
6071h VAR target_torque INT16 rw
6072h VAR max_torque UINT16 rw
6074h VAR torque_demand_value INT16 ro
6076h VAR motor_rated_torque UINT32 rw
6077h VAR torque_actual_value INT16 ro
6078h VAR current_actual_value INT16 ro
6079h VAR DC_link_circuit_voltage UINT32 ro
6087h VAR torque_slope UINT32 rw
6088h VAR torque_profile_type INT16 rw
60F7h RECORD power_stage_parameters rw
60F6h RECORD torque_control_parameters rw
Oggetti trattati in altri capitoli
Index Oggetto Name Tipo Capitolo
6040h VAR controlword INT16 7 Controllo dell'unità (Device Control)
60F9h RECORD motor_parameters 6.5 Regolatore di corrente e adattamento
del motore
6075h VAR motor_rated_current UINT32 6.5 Regolatore di corrente e adattamento
del motore
6073h VAR max_current UINT16 6.5 Regolatore di corrente e adattamento
del motore

8. Modi operativi
202 Festo P.BE.CMMP-CO-SW-IT 0708NH
Oggetto 6071h: target_torque
Durante il funzionamento a coppia regolata (Profile Torque Mode) questo parametro è il valore di input per il regolatore di coppia. Viene specificato in millesimi della coppia nominale (oggetto 6076h).
Index 6071h
Name target_torque
Object Code VAR
Data Type INT16
Access rw
PDO Mapping yes
Units motor_rated_torque / 1000
Value Range -32768 … 32768
Default Value 0
Oggetto 6072h: max_torque
Questo valore rappresenta la coppia max. ammissibile del motore. Viene specificato in millesimi della coppia nominale (oggetto 6076h). Introdurre qui il valore 2000 se ad es. è
ammissibile brevemente un sovraccarico doppio del motore.
L'oggetto 6072h: max_torque corrisponde con l'oggetto 6073h: max_current e può essere descritto solo se in precedenza l'oggetto 6075h: motor_rated_current è stato descritto con un valore valido.
Index 6072h
Name max_torque
Object Code VAR
Data Type UINT16
Access rw
PDO Mapping yes
Units motor_rated_torque / 1000
Value Range 1000 … 65536
Default Value 2023

8. Modi operativi
Festo P.BE.CMMP-CO-SW-IT 0708NH 203
Oggetto 6074h: torque_demand_value
Questo oggetto permette di leggere la coppia nominale corrente in millesimi della coppia nominale (6076h). Vengono contemplate le limitazioni interne del regolatore (valore limite
della corrente e monitoraggio I2t).
Index 6074h
Name torque_demand_value
Object Code VAR
Data Type INT16
Access ro
PDO Mapping yes
Units motor_rated_torque / 1000
Value Range --
Default Value --
Oggetto 6076h: motor_rated_torque
Questo oggetto specifica la coppia nominale del motore, che è riportata sulla targhetta di
identificazione. Deve essere immessa nell'unità 0,001 Nm.
Index 6076h
Name motor_rated_torque
Object Code VAR
Data Type UINT32
Access rw
PDO Mapping yes
Units 0,001 Nm
Value Range --
Default Value 296
Oggetto 6077h: torque_actual_value
Questo oggetto permette di leggere il valore effettivo della coppia del motore in millesimi della coppia nominale (oggetto 6076h).
Index 6077h
Name torque_actual_value
Object Code VAR
Data Type INT16

8. Modi operativi
204 Festo P.BE.CMMP-CO-SW-IT 0708NH
Access ro
PDO Mapping yes
Units motor_rated_torque / 1000
Value Range --
Default Value --
Oggetto 6078h: current_actual_value
Questo oggetto permette di leggere il valore effettivo della corrente del motore in millesimi della corrente nominale (oggetto 6075h).
Index 6078h
Name current_actual_value
Object Code VAR
Data Type INT16
Access ro
PDO Mapping yes
Units motor_rated_current / 1000
Value Range --
Default Value --
Oggetto 6079h: dc_link_circuit_voltage
Questo oggetto permette di leggere la tensione del circuito intermedio del regolatore.
La tensione viene specificata nell'unità ‚millivolt‛.
Index 6079h
Name dc_link_circuit_voltage
Object Code VAR
Data Type UINT32
Access ro
PDO Mapping yes
Units mV
Value Range --
Default Value --

8. Modi operativi
Festo P.BE.CMMP-CO-SW-IT 0708NH 205
Oggetto 6087h: torque_slope
Questo parametro descrive la velocità di variazione della rampa del valore nominale, che deve essere specificata in millesimi della coppia nominale/secondo. Ad esempio il valore nominale della coppia target_torque di 0 Nm viene aumentato sul valore motor_rated_torque. Se il valore iniziale della rampa di coppia inserita deve raggiungere
questo valore in un secondo, allora introdurre il valore 1000 in questo oggetto.
Index 6087h
Name torque_slope
Object Code VAR
Data Type UINT32
Access rw
PDO Mapping yes
Units motor_rated_torque / 1000 s
Value Range --
Default Value E310F94h
Oggetto 6088h: torque_profile_type
Con questo oggetto torque_profile_type viene prestabilito con quale forma di curva deve
essere eseguito un salto del valore nominale. Attualmente in questo regolatore è implementata solo la rampa lineare, così questo oggetto può essere descritto solo con il valore 0.
Index 6088h
Name torque_profile_type
Object Code VAR
Data Type INT16
Access rw
PDO Mapping yes
Units --
Value Range 0
Default Value 0
Valore Significato
0 rampa lineare

9. Indice analitico
206 Festo P.BE.CMMP-CO-SW-IT 0708NH
9. Indice analitico
—A—
A in Display a 7 segmenti ................... 134 Abilitazione del modulo terminale ....... 72 Abilitazione del regolatore................... 72 acceleration_factor .............................. 68 Accelerazione
con della corsa di riferimento ......... 165 frenante (posizionamento) ............. 175 stop rapido (posizionamento) ........ 176
Accelerazione frenante di posizionamento .............................. 175
Accelerazione per stop rapido ........... 176 actual_dc_link_circuit_voltage ............ 75 actual_size ........................................ 184 analog_input_offset .......................... 115
analog_input_offset_ch_0 ................. 115 analog_input_offset_ch_1 ................. 115 analog_input_offset_ch_2 ................. 115 analog_input_voltage ........................ 114
analog_input_voltage_ch_0 .............. 114 analog_input_voltage_ch_1 .............. 114 analog_input_voltage_ch_2 .............. 115 Angolo offset del resolver .................... 84 Attivare errore iit ................................. 82 Avviare posizionamento .................... 177
—B—
Battuta ...................................... 169, 170 brake_delay_time .............................. 128 buffer_clear ....................................... 185 buffer_organisation ........................... 184 buffer_position .................................. 185
—C—
Carico max. I2t ...................................... 82 Circuito intermedio
Monitoraggio del .............................. 77
cob_id_sync ......................................... 42 cob_id_used_by_pdo .......................... 36 Codice del costruttore ....................... 129 Codice di prodotto ............................. 129 commissioning_state......................... 134 control_effort ....................................... 96 Controllo del regolatore ..................... 138 Controllo dell'unità ............................ 138
controlword ....................................... 143
comandi .......................................... 144
descrizione degli oggetti ................ 143 occupazione dei bit ................ 140, 144
Controlword per dati di interpolazione ................................ 181
Coppia ammissibile ........................... 202 Coppia di arrivo
(regolazione della coppia) .............. 202 Coppia di poli....................................... 81 Coppia nominale
(regolazione della coppia) .............. 202 Coppia nominale del motore .............. 203 Corrente di picco .................................. 78
motore .............................................. 80 Corrente di picco del motore................ 80 Corrente max. ...................................... 78 Corrente nominale
motore .............................................. 80 Corrente nominale del motore ............. 80
Corrente nominale dell'unità ............... 77 Corsa di riferimento ........................... 160
controllo del ................................... 171 timeout ........................................... 165
Corsa di riferimento metodi ............... 166 Corse di riferimento
accelerazione ................................. 165 metodo ........................................... 163 offset del punto zero ...................... 162 velocità ........................................... 164 velocità di ricerca ........................... 164 velocità lentissima .......................... 164
Costante di tempo del filtro velocità di sincronizzazione ............ 113
Costante di tempo del regolatore di corrente ........................................ 86
Costante di tempo del regolatore
di posizione ...................................... 93 current_actual_value ......................... 204 current_limitation .............................. 102 cycletime_current_controller ............. 132 cycletime_position_controller ........... 133 cycletime_tracectory_generator ........ 133 cycletime_velocity_controller ............ 133

9. Indice analitico
Festo P.BE.CMMP-CO-SW-IT 0708NH 207
—D—
Dati di interpolazione ........................ 180 dc_link_circuit_voltage ...................... 204
Device Control ................................... 138 dig_out_state_mapp_dout_1 ............ 118 dig_out_state_mapp_dout_2 ............ 119 dig_out_state_mapp_dout_3 ............ 119 digital_inputs .................................... 116 digital_outputs .................................. 117 digital_outputs_data ......................... 117 digital_outputs_mask ........................ 117 digital_outputs_state_mapping ........ 118 disable_operation_option_code ........ 156 Disattivare monitoraggio del
circuito intermedio ........................... 77 Display a 7 segmenti
'A' in del ......................................... 134 divisor
acceleration_factor ........................... 68 position_factor ................................. 63 velocity_encoder_factor ................... 65
drive_data ................ 72, 82, 98, 120, 128
—E—
EMERGENCY ........................................ 44 Emulazione dell'encoder incrementale
risoluzione .............................. 109, 110 enable_dc_link_undervoltage_error .... 77 enable_enhanced_modulation ............ 73 enable_logic ........................................ 72 encoder_emulation_data................... 109 encoder_emulation_resolution.. 109, 110 encoder_offset_angle .......................... 84 encoder_x10_counter ........................ 108
encoder_x10_data_field .................... 107 encoder_x10_divisor ......................... 108 encoder_x10_numerator ................... 108 encoder_x10_resolution .................... 107 encoder_x2a_data_field .................... 105
encoder_x2a_divisor ......................... 105 encoder_x2a_numerator ................... 105 encoder_x2a_resolution .................... 105 encoder_x2b_counter ........................ 107 encoder_x2b_data_field .................... 106 encoder_x2b_divisor ......................... 106 encoder_x2b_numerator ................... 106 encoder_x2b_resolution .................... 106
end_velocity ...................................... 174 error_management ............................ 136 Errore
'A' in Display a 7 segmenti ............. 134
messaggi di errore SDO .................... 29 regolatore ......................................... 44
Errore di posizionamento..................... 89 definizione ........................................ 89 finestra di errore ............................... 95 superamento del valore limite .......... 98 timeout ............................................. 96
Errore di posizionamento-timeout ....... 96
—F—
Factor Group ........................................ 61 acceleration_factor ........................... 68 polarity ............................................. 70 position_factor ................................. 63 velocity_encoder_factor ................... 65
Fattori di conversione .......................... 61 Fattore di posizione .......................... 63 Selezione del segno aritmetico ......... 70
Fattori di scalatura ............................... 61 Fattore di posizione .......................... 63 Selezione del segno aritmetico ......... 70
fault_reaction_option_code .............. 157 Finecorsa ........................... 120, 166, 168
polarità ........................................... 121 rampa di stop d'emergenza ............ 123
Finestra di arrivo finestra di posizione ......................... 97 tempo ............................................... 97
Finestra di arrivo con regolazione della velocità .................................. 194
Finestra errore di posizionamento ....... 95 Finestra posizione di arrivo .................. 97 firmware_custom_version ................. 131 firmware_main_version ..................... 131 first_mapped_object ........................... 37
Following_error ................................... 89 following_error_time_out .................... 96 following_error_window ...................... 95 fourth_mapped_object ........................ 38 Freno
tempo di ritardo .............................. 128 Frequenza PWM ................................... 72

9. Indice analitico
208 Festo P.BE.CMMP-CO-SW-IT 0708NH
—G—
Generatore di curve di traslazione ..... 172 Gestione degli errori .......................... 136
Guadagno del regolatore di corrente ... 86 Guadagno regolatore di posizione ....... 93
—H—
home_offset ...................................... 162 homing mode
home_offset ................................... 162 homing_acceleration ...................... 165 homing_method ............................. 162 homing_speeds .............................. 164
Homing Mode .................................... 160 homing_acceleration ......................... 165 homing_method ................................ 162 homing_speeds ................................. 164 homing_switch_polarity .................... 122 homing_switch_selector .................... 122 homing_timeout ................................ 165
—I—
Identificatore per PDO ......................... 36 Identificazione del unità .................... 128 identity_object .................................. 128 iit_error_enable ................................... 82 iit_ratio_motor .................................... 82 iit_time_motor ..................................... 82 Impostare parametri ............................ 56 Impostazione della modo operativo .. 158 Ingressi analogici ............................... 114
tensione di ingresso canale 0 ......... 114 tensione di ingresso canale 1 ......... 114 tensione di ingresso canale 2 ......... 115
tensione offset canale 0 ................. 115 tensione offset canale 1 ................. 115 tensione offset canale 2 ................. 115 tensioni di ingresso ........................ 114 tensioni offset ................................ 115
Ingresso SAMPLE come interruttore di riferimento .................................. 122
Ingresso START come interruttore di riferimento .................................. 122
inhibit_time ......................................... 36 interpolation_data_configuration ...... 184 interpolation_data_record ................. 180 interpolation_submode_select .......... 180
interpolation_sync_definition ............ 183 interpolation_time_period ................. 182 Interruttore di riferimento
polarità ........................................... 122
Interruttori di riferimento ........... 120, 122 ip_data_controlword ......................... 181 ip_data_position ............................... 181 ip_sync every n event ........................ 183 ip_time_index .................................... 182 ip_time_units..................................... 182
—L—
limit_current .............................. 102, 103 limit_current_input_channel ............. 102 limit_speed_input_channel ............... 103 limit_switch_deceleration .................. 123 limit_switch_polarity ......................... 121 Limitatore di coppia Regime
di velocità ....................................... 102 Limitatore di velocità Regime
di coppia ......................................... 103 Limitazione della coppia .................... 102
origine ............................................ 102 scalatura ......................................... 102 valore nominale .............................. 102
Limitazione della velocità .................. 103 origine ............................................ 103 scalatura ......................................... 103 valore nominale .............................. 103
Limitazione di corrente ...................... 102 Logica di abilitazione ........................... 72 Logica di abilitazione del regolatore .... 72
—M—
max_buffer_size ................................ 184 max_current ........................................ 80 max_dc_link_circuit_voltage ............... 76 max_motor_speed ............................. 196 max_position_range_limit ................... 99 max_power_stage_temperature .......... 74
max_torque ....................................... 202 Messaggio EMERGENCY ...................... 44
struttura del ..................................... 44 Messaggio PDO ................................... 31 Messaggio SYNC .................................. 42 Metodo .............................................. 163 min_dc_link_circuit_voltage ................ 76 min_position_range_limit .................... 99

9. Indice analitico
Festo P.BE.CMMP-CO-SW-IT 0708NH 209
modes_of_operation ......................... 158 modes_of_operation_display ............ 159 Modo operativo ......................... 158, 159
corsa di riferimento ........................ 160
impostazione del ............................ 158 lettura del ....................................... 159 modifica del .................................... 158 regolazione della coppia ................ 200 regolazione della velocità ............... 188
Modulazione sinusoidale ampliata ...... 73 Monitoraggio del circuito
intermedio .................................. 76, 77 motion_profile_type .......................... 176 motor_data .................................... 81, 84 motor_rated_current ........................... 80 motor_rated_torque .......................... 203 motor_temperatur_sensor_polarity ..... 84
—N—
nominal_current .................................. 77 nominal_dc_link_circuit_voltage ......... 75 Norme di sicurezza .............................. 11
Not Ready to Switch On ..................... 141 number_of_mapped_objects ............... 37 numerator
acceleration_factor ........................... 68 position_factor ................................. 63 velocity_encoder_factor ................... 65
Numero di oggetti mappati .................. 37 Numero di poli ..................................... 81 Numero di revisione CANopen ........... 129 Numero di versione della firmware .... 131 Numero di versione della variante
personalizzata ................................ 131
—O—
Offset del punto zero ......................... 162 Offset del resolver ............................... 84 Offset resolver ..................................... 84 Oggetti
oggetto 1001h ................................... 44 oggetto 1003h ................................... 47 oggetto 1003h_01h ............................ 47 oggetto 1003h_02h ............................ 47 oggetto 1003h_03h ............................ 48 oggetto 1003h_04h............................ 48 oggetto 1005h ................................... 42 oggetto 1010h ................................... 59
oggetto 1010h_01h ............................ 59 oggetto 1011h ................................... 58 oggetto 1011h_01h ............................ 58 oggetto 1018h ................................. 128
oggetto 1018h_01h .......................... 129 oggetto 1018h_02h .......................... 129 oggetto 1018h_03h .......................... 129 oggetto 1018h_04h .......................... 129 oggetto 1401h ................................... 40 oggetto 1402h ................................... 41 oggetto 1403h ................................... 41 oggetto 1601h ................................... 40 oggetto 1602h ................................... 41 oggetto 1603h ................................... 41 oggetto 1800h ............................. 36, 38 oggetto 1800h_01h ............................ 36 oggetto 1800h_02h ............................ 36 oggetto 1800h_03h ............................ 36 oggetto 1801h ................................... 38 oggetto 1802h ................................... 39 oggetto 1803h ................................... 39 oggetto 1A00h ............................. 37, 38
oggetto 1A00h_00h ........................... 37 oggetto 1A00h_01h ........................... 37 oggetto 1A00h_02h ........................... 37 oggetto 1A00h_03h ........................... 37 oggetto 1A00h_04h ........................... 38 oggetto 1A01h ................................... 38 oggetto 1A02h ................................... 39 oggetto 1A03h ................................... 39 oggetto 2014h ................................... 39 oggetto 2015h ................................... 40 oggetto 2016h ................................... 40 oggetto 2017h ................................... 40
oggetto 201Ah ................................. 109 oggetto 201Ah_01h ......................... 109 oggetto 2021h ................................. 111 oggetto 2022h ................................. 112 oggetto 2023h ................................. 113
oggetto 2024h ................................. 105 oggetto 2024h_01h .......................... 105 oggetto 2024h_02h .......................... 105 oggetto 2024h_03h .......................... 105 oggetto 2025h ................................. 107 oggetto 2025h_01h .......................... 107 oggetto 2025h_02h .......................... 108 oggetto 2025h_03h .......................... 108

9. Indice analitico
210 Festo P.BE.CMMP-CO-SW-IT 0708NH
oggetto 2025h_04h.......................... 108 oggetto 2026h ................................. 106 oggetto 2026h_01h .......................... 106 oggetto 2026h_02h .......................... 106
oggetto 2026h_03h .......................... 106 oggetto 2026h_04h.......................... 107 oggetto 2028h ................................. 110 oggetto 202Dh .................................. 94 oggetto 202Eh ................................. 192 oggetto 202Fh ................................. 112 oggetto 202Fh_07h .......................... 112 oggetto 2045h ................................. 165 oggetto 204Ah ................................ 124 oggetto 204Ah_01h ......................... 124 oggetto 204Ah_02h ......................... 124 oggetto 204Ah_03h ......................... 125 oggetto 204Ah_04h ......................... 125 oggetto 204Ah_05h ......................... 126 oggetto 204Ah_06h ......................... 126 oggetto 2090h ................................. 198 oggetto 2090h_01h .......................... 198 oggetto 2090h_02h .......................... 198
oggetto 2090h_03h .......................... 198 oggetto 2090h_04h.......................... 198 oggetto 2090h_05h .......................... 199 oggetto 2100h ................................. 136 oggetto 2400h ................................. 114 oggetto 2400h_01h ......................... 114 oggetto 2400h_02h ......................... 114 oggetto 2400h_03h.......................... 115 oggetto 2401h ................................. 115 oggetto 2401h_01h.......................... 115 oggetto 2401h_02h.......................... 115 oggetto 2401h_03h.......................... 115
oggetto 2415h ................................. 102 oggetto 2415h_01h.......................... 102 oggetto 2415h_02h.......................... 102 oggetto 2416h ................................. 103 oggetto 2416h_01h.......................... 103
oggetto 2416h_02h.......................... 103 oggetto 2420h ................................. 118 oggetto 2420h_01h.......................... 118 oggetto 2420h_02h.......................... 119 oggetto 2420h_03h.......................... 119 oggetto 6040h ................................ 143 oggetto 6041h ................................. 148 oggetto 604Dh .................................. 81
oggetto 605Ah ................................. 157 oggetto 605Ch ................................. 156 oggetto 605Eh ................................. 157 oggetto 6060h ................................. 158
oggetto 6061h ................................. 159 oggetto 6062h ................................... 94 oggetto 6064h ................................... 95 oggetto 6065h ................................... 95 oggetto 6066h ................................... 96 oggetto 6067h ................................... 97 oggetto 6068h ................................... 97 oggetto 6069h ................................. 191 oggetto 606Ah ................................. 191 oggetto 606Bh ................................ 192 oggetto 606Ch ................................. 193 oggetto 606Dh ................................ 194 oggetto 606Eh ................................. 195 oggetto 606Fh ................................. 195 oggetto 6070h ................................. 196 oggetto 6071h ................................ 202 oggetto 6072h ................................. 202 oggetto 6073h ................................... 80
oggetto 6074h ................................. 203 oggetto 6075h ................................... 80 oggetto 6076h ................................. 203 oggetto 6077h ................................. 203 oggetto 6078h ................................. 204 oggetto 6079h ................................. 204 oggetto 607Ah ................................. 173 oggetto 607Bh .................................. 99 oggetto 607Bh_01h ........................... 99 oggetto 607Bh_02h ........................... 99 oggetto 607Ch ................................. 162 oggetto 607Eh ................................... 70
oggetto 6080h ................................. 196 oggetto 6081h ................................. 174 oggetto 6082h ................................. 174 oggetto 6083h ................................. 175 oggetto 6084h ................................. 175
oggetto 6085h ................................. 176 oggetto 6086h ................................. 176 oggetto 6087h ................................. 205 oggetto 6088h ................................. 205 oggetto 6093h ................................... 63 oggetto 6093h_01h ............................ 63 oggetto 6093h_02h ............................ 63 oggetto 6094h ................................... 65

9. Indice analitico
Festo P.BE.CMMP-CO-SW-IT 0708NH 211
oggetto 6094h_01h............................ 65 oggetto 6094h_02h............................ 65 oggetto 6097h ................................... 68 oggetto 6097h_01h ............................ 68
oggetto 6097h_02h ............................ 68 oggetto 6098h ................................. 162 oggetto 6099h ................................. 164 oggetto 6099h_01h .......................... 164 oggetto 6099h_02h .......................... 164 oggetto 609Ah ................................. 165 oggetto 60C0h ................................. 180 oggetto 60C1h ................................. 180 oggetto 60C1h_01h ......................... 181 oggetto 60C1h_02h ........................ 181 oggetto 60C2h ................................. 182 oggetto 60C2h_01h ......................... 182 oggetto 60C2h_02h ......................... 182 oggetto 60C3h ................................. 183 oggetto 60C3h_01h ......................... 183 oggetto 60C3h_02h ......................... 183 oggetto 60C4h ................................. 184 oggetto 60C4h_01h ......................... 184
oggetto 60C4h_02h ......................... 184 oggetto 60C4h_03h ........................ 184 oggetto 60C4h_04h ......................... 185 oggetto 60C4h_05h ......................... 185 oggetto 60C4h_06h ......................... 185 oggetto 60F6h ................................... 86 oggetto 60F6h_01h ............................ 86 oggetto 60F6h_02h ............................ 86 oggetto 60F9h ................................... 87 oggetto 60F9h_01h ............................ 87 oggetto 60F9h_02h ............................ 88 oggetto 60F9h_04h ............................ 88
oggetto 60FAh ................................... 96 oggetto 60FBh ................................... 92 oggetto 60FBh_01h ............................ 93 oggetto 60FBh_02h ............................ 93 oggetto 60FBh_04h ............................ 93
oggetto 60FBh_05h ............................ 93 oggetto 60FDh ................................. 116 oggetto 60FEh ................................. 117 oggetto 60FEh_01h .......................... 117 oggetto 60FEh_02h .......................... 117 oggetto 60FFh ................................. 197 oggetto 6410h ............................. 81, 84 oggetto 6410h_03h............................ 82
oggetto 6410h_04h............................ 82 oggetto 6410h_10h ............................ 83 oggetto 6410h_11h ............................ 84 oggetto 6410h_11h ............................ 84
oggetto 6410h_14h............................ 84 oggetto 6510h ........ 72, 82, 98, 120, 128 oggetto 6510h_10h ............................ 72 oggetto 6510h_11h .......................... 121 oggetto 6510h_13h .......................... 122 oggetto 6510h_14h .......................... 122 oggetto 6510h_15h .......................... 123 oggetto 6510h_18h .......................... 128 oggetto 6510h_20h .......................... 100 oggetto 6510h_22h ............................ 98 oggetto 6510h_30h ............................ 72 oggetto 6510h_31h ............................ 74 oggetto 6510h_32h ............................ 74 oggetto 6510h_33h ............................ 75 oggetto 6510h_34h ............................ 75 oggetto 6510h_35h ............................ 76 oggetto 6510h_36h ............................ 76 oggetto 6510h_37h ............................ 77
oggetto 6510h_38h ............................ 82 oggetto 6510h_3Ah ........................... 73 oggetto 6510h_40h ............................ 77 oggetto 6510h_41h ............................ 78 oggetto 6510h_A9h ......................... 131 oggetto 6510h_AAh ......................... 131 oggetto 6510h_B0h ......................... 132 oggetto 6510h_B1h ......................... 133 oggetto 6510h_B2h ......................... 133 oggetto 6510h_B3h ......................... 133 oggetto 6510h_C0h .......................... 134
—P—
Parametri default caricare ................... 58 Parametri del modulo terminale .......... 72
Corrente max. ................................... 78 Corrente nominale dell'unità ............ 77
Del circuito intermedio ..................... 75 Frequenza PWM ................................ 72 Logica di abilitazione ........................ 72 Temperatura max. ............................ 74 Tensione max. del circuito
intermedio ..................................... 76 Tensione min. del circuito
intermedio ..................................... 76

9. Indice analitico
212 Festo P.BE.CMMP-CO-SW-IT 0708NH
Tensione nominale dell'unità ........... 75 Parametri del motore
Coppia di poli ................................... 81 Corrente nominale ............................ 80
Tempo I2t .......................................... 82 Parametri di mappatura per PDO ......... 37 Parametri di trasmissione per PDO ...... 36 Parametri motore
angolo offset resolver ....................... 84 Parametri regolatore di posizione ........ 92 PDO ..................................................... 31
1. oggetto mappato .......................... 37 2. oggetto mappato .......................... 37 3. oggetto mappato .......................... 37 4. oggetto mappato .......................... 38 RPDO2
1. oggetto mappato ....................... 40 2. oggetto mappato ....................... 40 3. oggetto mappato ....................... 40 4. oggetto mappato ....................... 40 COB-ID used by PDO ..................... 40 first mapped object ....................... 40
fourth mapped object .................... 40 Identifier ........................................ 40 number of mapped objects ........... 40 Numero di oggetti mappati ........... 40 second mapped object .................. 40 third mapped object ...................... 40 Tipo di trasmissione ...................... 40 transmission type .......................... 40
RPDO3 1. oggetto mappato ....................... 41 2. oggetto mappato ....................... 41 3. oggetto mappato ....................... 41
4. oggetto mappato ....................... 41 COB-ID used by PDO ..................... 41 first mapped object ....................... 41 fourth mapped object .................... 41 Identifier ........................................ 41
number of mapped objects ........... 41 Numero di oggetti mappati ........... 41 second mapped object .................. 41 third mapped object ...................... 41 Tipo di trasmissione ...................... 41 transmission type .......................... 41
RPDO4 1. oggetto mappato ....................... 41
2. oggetto mappato ....................... 41 3. oggetto mappato ....................... 41 4. oggetto mappato ....................... 41 COB-ID used by PDO ..................... 41
first mapped object ....................... 41 fourth mapped object .................... 41 Identifier ........................................ 41 number of mapped objects ........... 41 Numero di oggetti mappati ........... 41 second mapped object .................. 41 third mapped object ...................... 41 Tipo di trasmissione ...................... 41 transmission type .......................... 41
TPDO1 1. oggetto mappato ....................... 38 2. oggetto mappato ....................... 38 3. oggetto mappato ....................... 38 4. oggetto mappato ....................... 38 COB-ID used by PDO ..................... 38 first mapped object ....................... 38 fourth mapped object .................... 38 Identifier ........................................ 38
inhibit time .................................... 38 maschera di trasmissione .............. 39 number of mapped objects ........... 38 Numero di oggetti mappati ........... 38 second mapped object .................. 38 Tempo di inibizione ....................... 38 third mapped object ...................... 38 Tipo di trasmissione ...................... 38 transmission type .......................... 38
TPDO2 1. oggetto mappato ....................... 38 2. oggetto mappato ....................... 38
3. oggetto mappato ....................... 38 4. oggetto mappato ....................... 38 COB-ID used by PDO ..................... 38 first mapped object ....................... 38 fourth mapped object .................... 38
Identifier ........................................ 38 inhibit time .................................... 38 maschera di trasmissione .............. 40 number of mapped objects ........... 38 Numero di oggetti mappati ........... 38 second mapped object .................. 38 Tempo di inibizione ....................... 38 third mapped object ...................... 38

9. Indice analitico
Festo P.BE.CMMP-CO-SW-IT 0708NH 213
Tipo di trasmissione ...................... 38 transmission type .......................... 38
TPDO3 1. oggetto mappato ....................... 39
2. oggetto mappato ....................... 39 3. oggetto mappato ....................... 39 4. oggetto mappato ....................... 39 COB-ID used by PDO ..................... 39 first mapped object ....................... 39 fourth mapped object .................... 39 Identifier ........................................ 39 inhibit time .................................... 39 maschera di trasmissione.............. 40 number of mapped objects ........... 39 Numero di oggetti mappati ........... 39 second mapped object .................. 39 Tempo di inibizione ....................... 39 third mapped object ...................... 39 Tipo di trasmissione ...................... 39 transmission type .......................... 39
TPDO4 1. oggetto mappato ....................... 39
2. oggetto mappato ....................... 39 3. oggetto mappato ....................... 39 4. oggetto mappato ....................... 39 COB-ID used by PDO ..................... 39 first mapped object ....................... 39 fourth mapped object .................... 39 Identifier ........................................ 39 inhibit time .................................... 39 maschera di trasmissione.............. 40 number of mapped objects ........... 39 Numero di oggetti mappati ........... 39 second mapped object .................. 39
Tempo di inibizione ....................... 39 third mapped object ...................... 39 Tipo di trasmissione ...................... 39 transmission type .......................... 39
peak_current ....................................... 78
phase_order ........................................ 83 Polarità sensore termico del motore .... 84 polarity ................................................ 70 pole_number ....................................... 81 position control function ..................... 89 position_actual_value ......................... 95 position_control_gain .......................... 93 position_control_parameter_set ......... 92
position_control_time ......................... 93 position_control_v_max ...................... 93 position_demand_sync_value ............. 94 position_demand_value ...................... 94
position_encoder_selection .............. 111 position_error_switch_off_limit ........... 98 position_error_tolerance_window ....... 93 position_factor .................................... 63 position_range_limit............................ 99 position_range_limit_enable ............. 100 Position_reached ................................. 90 position_window ................................. 97 position_window_time ........................ 97 Posizionamento ................................. 177
accelerazione frenante ................... 175 accelerazione per stop rapido ........ 176 Handshake ..................................... 177 posizione di arrivo .......................... 173 velocità durante ............................. 174
Posizione di arrivo ............................. 173 Posizione di campionamento
fronte di discesa ............................. 126
fronte di risalita .............................. 126 power_stage_temperature .................. 74 pre_defined_error_field ....................... 47 product_code .................................... 129 Profil nuova Mode
profile_deceleration ....................... 175 Profile nuova Mode
end_velocity ................................... 174 motion_profile_type ....................... 176 profile_acceleration ........................ 175 profile_velocity ............................... 174 quick_stop_deceleration ................ 176
target_position ............................... 173 Profile Torque Mode .......................... 200
current_actual_value ...................... 204 dc_link_circuit_voltage ................... 204 max_torque .................................... 202
motor_rated_torque ....................... 203 target_torque ................................. 202 torque_actual_value....................... 203 torque_demand_value ................... 203 torque_profile_type ........................ 205 torque_slope .................................. 205
Profile Velocity Mode ......................... 188 max_motor_speed .......................... 196

9. Indice analitico
214 Festo P.BE.CMMP-CO-SW-IT 0708NH
sensor_selection_code ................... 191 target_velocity................................ 197 velocity_actual_value ..................... 193 velocity_demand_value .................. 192
velocity_sensor .............................. 191 velocity_threshold .......................... 195 velocity_threshold_time ................. 196 velocity_window ............................. 194 velocity_window_time .................... 195
profile_acceleration ........................... 175 profile_deceleration .......................... 175 profile_velocity .................................. 174 Profilo di posizionamento
lineare ............................................ 176 senza strappi .................................. 176 sinusoidale2 .................................... 176
Protezione contro la rotazione ............. 87 pwm_frequency ................................... 72
—Q—
quick_stop_deceleration ................... 176 quick_stop_option_code ................... 157
—R—
Ready to Switch On ........................... 141 Reazione con comando
‘disable operation’ ......................... 156 Reazione con comando ‘quick stop’ .. 157 Receive_PDO_2 ................................... 40 Receive_PDO_3 ................................... 41 Receive_PDO_4 ................................... 41 Registro di errori .................................. 44 Regolatore di corrente
costante di tempo ............................. 86
guadagno ......................................... 86 parametri .......................................... 86
Regolatore di posizione ....................... 89 campo morto .................................... 93 costante di tempo ............................. 93 guadagno ......................................... 93
parametri .......................................... 92 Uscita del.......................................... 96
Regolatore di velocità .......................... 87 costante di tempo ............................. 88 costante di tempo del filtro .............. 88 guadagno ......................................... 87 parametri .......................................... 87
Regolazione della coppia ................... 200
coppia ammissibile ......................... 202 coppia di arrivo ............................... 202 nominale ................................ 202, 203 profilo del valore nominale ............. 205
valore nominale della corrente ....... 203 Regolazione della velocità ................. 188
coppia del motore .......................... 196 finestra di arrivo ............................. 194 soglia di fermo ................................ 195 tempo finestra di arrivo .................. 195 tempo soglia di fermo ..................... 196 velocità di arrivo ............................. 197 velocità nominale ........................... 197
resolver_offset_angle .......................... 84 restore_all_default_parameters .......... 58 restore_parameters ............................. 58 revision_number ................................ 129 R-PDO 2 ............................................... 40 R-PDO 3 ............................................... 41 R-PDO 4 ............................................... 41
—S—
Sample controllo ......................................... 125 maschera di stato ........................... 125 modo .............................................. 124 status ............................................. 124
sample_control .................................. 125 sample_data ...................................... 124 sample_mode .................................... 124 sample_position_falling_edge ........... 126 sample_position_rising_edge ............ 126 sample_status ................................... 124 sample_status_mask ......................... 125
save_all_parameters ........................... 59 SDO ..................................................... 27
messaggi di errore ............................ 29 SDO Message ...................................... 27 second_mapped_object ...................... 37
Selezione del valore effettivo della posizione ........................................ 111
Selezione dell'origine di sincronizzazione ............................. 112
sensor_selection_code ...................... 191 serial_number ................................... 129 Set di parametri
caricare set di memorizzare .............. 56

9. Indice analitico
Festo P.BE.CMMP-CO-SW-IT 0708NH 215
set di parametri salvare .................... 59 valori default caricare ....................... 58
Set di parametri salvare ....................... 59 size_of_data_record .......................... 185
Soglia di fermo con regolazione della velocità .................................. 195
speed_during_search_for_switch ...... 164 speed_during_search_for_zero ......... 164 speed_limitation ................................ 103 standard_error_field_0 ........................ 47 standard_error_field_1 ........................ 47 standard_error_field_2 ........................ 48 standard_error_field_3 ........................ 48 State
Not Ready to Switch On .................. 141 Ready to Switch On ........................ 141 Switch On Disabled ........................ 141 Switched On ................................... 141
Stato Not Ready to Switch On .................. 141 Ready to Switch On ........................ 141 Switch On Disabled ........................ 141
Switched On ................................... 141 Stato di parametrazione .................... 134 Statusword
descrizione degli oggetti ................ 148 occupazione dei bit ........................ 148
store_parameters ................................ 59 Superamento valore limite errore di
posizionamento ................................ 98 Switch On Disabled ........................... 141 SYNC .................................................... 42 synchronisation_encoder_selection .. 112 synchronisation_filter_time ............... 113
synchronisation_main ....................... 112 synchronisation_selector_data ......... 112 syncronize_on_group ........................ 183
—T—
target_position .................................. 173 target_torque ............................ 201, 202 target_velocity ................................... 197 Tempo ciclo
comando di posizionamento .......... 133 regolatore di corrente ..................... 132 regolatore di posizione ................... 133 regolatore di velocità ...................... 133
Tempo ciclo PDO .................................. 36 Tempo di ritardo del freno ................. 128 Tempo finestra di arrivo ....................... 97 Tempo finestra di arrivo con
regolazione della velocità ............... 195 Tempo I2t ............................................. 82 Tempo soglia di fermo con
regolazione della velocità ............... 196 Tensione corrente del circuito
intermedio ........................................ 75 Tensione del circuito intermedio
corrente ............................................ 75 max. .................................................. 76 min. .................................................. 77
Tensione min. del circuito intermedio ........................................ 76
Tensione nominale dell'unità .............. 75 third_mapped_object .......................... 37 Tipo di interpolazione ........................ 180 Tipo di trasmissione ............................ 36 torque_actual_value .......................... 203 torque_control_gain ............................ 86
torque_control_parameters ................. 86 torque_control_time ............................ 86 torque_demand_value ...................... 203 torque_profile_type ........................... 205 torque_slope ..................................... 205 T-PDO 1 ............................................... 38 T-PDO 2 ............................................... 38 T-PDO 3 ............................................... 39 T-PDO 4 ............................................... 39 tpdo_1_transmit_mask ........................ 39 tpdo_2_transmit_mask ........................ 40 tpdo_3_transmit_mask ........................ 40
tpdo_4_transmit_mask ....................... 40 transfer_PDO_1 ................................... 38 transfer_PDO_2 ................................... 38 transfer_PDO_3 ................................... 39 transfer_PDO_4 ................................... 39
transmission_type ............................... 36 transmit_pdo_mapping ....................... 37 transmit_pdo_parameter ..................... 36 Traslazione su nuova posizione ......... 177
—U—
Uscita del regolatore di posizione ....... 96 Uscite analogici ................................. 116

9. Indice analitico
216 Festo P.BE.CMMP-CO-SW-IT 0708NH
Uscite digitali Mapping di DOUT1 ......................... 118 Mapping di DOUT2 ......................... 119 Mapping di DOUT3 ......................... 119
Uscite digitali ..................................... 117 Mapping ......................................... 118 maschera ........................................ 117 stati ................................................ 117
—V—
Valore di posizione interpolazione .... 181 Valore effettivo
coppia (torque_actual_value) ......... 203 posizione in position_units
(position_actual_value) ................. 95 Valore effettivo della coppia .............. 203 Valore effettivo della velocità ............ 193 Valore effettivo posizione
(position units) ................................. 95 Valore limite errore di
posizionamento ................................ 98 Valore nominale
ammissibile .................................... 202 corrente .......................................... 203 velocità di sincronizzazione
(velocity units) ............................. 192 Valore nominale della corrente .......... 203 Velocità
con della corsa di riferimento ......... 164 durante posizionamento ................ 174
Velocità di arrivo per regolazione della velocità .................................. 197
Velocità di correzione .......................... 93 Velocità di posizionamento ............... 174
Velocità di sincronizzazione (velocity units) ................................ 192
Velocità max. del circuito intermedio ........................................ 76
Velocità max. del motore ................... 196
Velocità max. modulo terminale .......... 74 Velocità nominale per regolazione
della velocità .................................. 197 velocity_acceleration_neg ................. 198
velocity_acceleration_pos ................. 198 velocity_actual_value ........................ 193 velocity_control_filter_time ................. 88 velocity_control_gain .......................... 87 velocity_control_parameter_set .......... 87 velocity_control_time .......................... 88 velocity_deceleration_neg ................. 199 velocity_deceleration_pos ................. 198 velocity_demand_sync_value ............ 192 velocity_demand_value ..................... 192 velocity_encoder_factor ...................... 65 velocity_rampe_enable ..................... 198 velocity_ramps .................................. 198 velocity_sensor_actual_value ........... 191 velocity_threshold ............................. 195 velocity_threshold_time .................... 196 velocity_window ................................ 194 velocity_window_time ....................... 195
vendor_id .......................................... 129
—X—
X10 attuatore ........................................ 108 contatore ........................................ 108 presa di forza .................................. 108 risoluzione ...................................... 107
X2A attuatore ........................................ 105 presa di forza .................................. 105 risoluzione ...................................... 105
X2B attuatore ........................................ 106 contatore ........................................ 107 presa di forza .................................. 106 risoluzione ...................................... 106

















