Page 1
POLITECNICO DI MILANO
Master Degree in Automation and Control Engineering
School of Industrial and Information Engineering
Centrifugal Compressor Modelling with a Particle
Filter Application for Optimal Estimation in
Turbochargers
Supervisor :
Prof. Sergio Bittanti
Co-supervisors:
Ing. Antonio De Marco
Ing. Diego Pareschi
Author :
Mirko Casnedi
r.n. 804751
Academic year 2015-2016
Page 3
Sommario
Negli ultimi decenni i turbocharger hanno trovato ampia diffusione e inno-
vazione tecnologica in diversi tipi di applicazioni e settori, tra i quali ricopre
un ruolo di primaria importanza quello della sovralimentazione di motori
Diesel. E importante per il corretto funzionamento di un turbocharger che
il compressore centrifugo e la turbina, le due turbomacchine che lo costituis-
cono, lavorino in condizioni di alta efficienza, cioe lontano da punti di lavoro
con perdite elevate o addirittura instabili. Per questa ragione risulta chiara
l’utilita di disporre di un sistema di monitoraggio al fine di stabilire in ogni
istante di tempo il punto di lavoro di entrambe le turbomacchine. In certe
situazioni alcune misure utili per il monitoraggio possono essere non disponi-
bili per varie ragioni, come punti difficilmente raggiungibili all’interno della
macchina o soggetti a forti sollecitazioni meccaniche e termiche, motivo da
cui nasce la necessita di impostare una procedura di stima atta a compensare
questa mancanza. Il presente lavoro di tesi, sviluppato in collaborazione con
ABB S.p.a (Sesto San Giovanni), si compone di due parti principali. Nella
prima parte viene presentata la teoria e la filosofia per la modellistica fisica di
un compressore centrifugo, nella quale la macchina e pensata come costituita
da diversi stadi in cui possono essere applicate le leggi della termodinamica
e della fluidomeccanica al fine di ricavare l’andamento delle variabili che de-
scrivono il flusso del fluido al suo interno. Il modello e quindi validato ed
utilizzato per l’analisi di alcuni tipi di perdite caratteristiche dei compressori.
Successivamente viene ricavato un modello alternativo a partire dalla mappa
caratteristica del compressore, utile ogniqualvolta i parametri geometrici del
compressore fossero sconosciuti. Nella seconda parte viene invece presentata
la teoria del Particle Filtering, tecnica di filtraggio appartenente alla classe
dei filtri bayesiani non lineari. Tale metodo di filtraggio e quindi applicato,
insieme al modello del compressore, per ricavare delle stime ottime della
portata volumetrica, pressioni e temperature non misurate nel turbocharger
del caso in esame. Infine viene presentato un modello semplificato per la
turbina assiale ed una possibile procedura di stima con il Particle Filter.
Page 5
Abstract
In the last decades turbochargers have seen a huge spreading and techno-
logical innovation in several fields and applications, most of all in Diesel
combustion engine supercharging. It is important for the correct operation
of turbochargers that the centrifugal compressor and turbine, the two tur-
bomachines by which it is constituted, work at high efficiency condition, i.e.
far enough from regions with high losses or even unstable. For this reasons
is clear the necessity for turbochargers monitoring, in order to establish at
each time the working point of both the turbomachines. Sometimes some
measures necessary for a correct monitoring may be not available for sev-
eral reasons, such as points difficult to reach or subject to high mechanical
and thermal stresses, from which arises the need to derive an estimation
procedure to counteract this lack. This thesis, developed in collaboration
with ABB S.p.a (Sesto San Giovanni), consists of two main parts. The
first part presents the theory and the philosophy for centrifugal compressors
modelling, in which the turbomachine is thought as constituted by a series
of ducts where the fundamental laws of termodynamics and fluid mechanics
can be applied to infer the flow conditions. The model is applied, validated
and utilized to analyse some kind of losses occurring in the compressor. Next
an alternative model, useful when geometrical data are not available, is built
interpolating some points extracted from an experimental map provided by
ABB. In the second part, the theory of non-linear Bayesian Particle Filter
is presented. Next a statistical analysis of the available experimental data
is made. The particle filter is then employed together with the compressor
model to optimally estimate non-measured flow rates, pressures and temper-
atures in the turbocharger. Lastly a simplified model for the axial turbine
is introduced and a possible filtering procedure is outlined.
Page 9
Contents
1 Introduction 1
1.1 Operation principles of turbochargers . . . . . . . . . . . . . 1
1.2 Turbocharger structure . . . . . . . . . . . . . . . . . . . . . . 3
1.3 Types of turbocharging . . . . . . . . . . . . . . . . . . . . . 4
1.3.1 Constant pressure turbocharging . . . . . . . . . . . . 4
1.3.2 Pulse system turbocharging . . . . . . . . . . . . . . . 4
1.4 Problem statement and motivation . . . . . . . . . . . . . . . 5
1.4.1 Case study: Marseglia generation plant . . . . . . . . 5
1.4.2 Monitoring system . . . . . . . . . . . . . . . . . . . . 6
1.4.3 Sensoring layout . . . . . . . . . . . . . . . . . . . . . 7
1.5 Structure of the thesis . . . . . . . . . . . . . . . . . . . . . . 8
2 Centrifugal Compressor Modelling 11
2.1 Motivation for physical compressor modelling . . . . . . . . . 11
2.1.1 1D Modelling . . . . . . . . . . . . . . . . . . . . . . . 12
2.2 Compressor structure . . . . . . . . . . . . . . . . . . . . . . 12
2.3 Preliminary tools and conventions . . . . . . . . . . . . . . . 14
2.3.1 Coordinate system . . . . . . . . . . . . . . . . . . . . 14
2.3.2 Absolute and relative velocities . . . . . . . . . . . . . 14
2.3.3 Sign convention . . . . . . . . . . . . . . . . . . . . . . 16
2.4 Isentropic modelling . . . . . . . . . . . . . . . . . . . . . . . 16
2.4.1 The stagnation state . . . . . . . . . . . . . . . . . . . 16
2.4.2 The relative stagnation state and Rothalpy . . . . . . 18
2.4.3 Adimensional Mass Flow Rate Equation . . . . . . . . 18
2.4.4 Use AME to calculate fluid flow process . . . . . . . . 19
2.4.5 Slip factor . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.4.6 Non-guided swirling flow . . . . . . . . . . . . . . . . . 21
2.5 Compressor losses . . . . . . . . . . . . . . . . . . . . . . . . 22
2.5.1 Compressor efficiency . . . . . . . . . . . . . . . . . . 22
2.5.2 Physics of loss mechanisms . . . . . . . . . . . . . . . 24
iii
Page 10
2.5.3 Loss coefficients . . . . . . . . . . . . . . . . . . . . . . 26
2.6 Model structure . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.6.1 Isentropic flow . . . . . . . . . . . . . . . . . . . . . . 30
2.6.2 Loss coefficients calculations . . . . . . . . . . . . . . . 32
2.6.3 Correction step for actual flow . . . . . . . . . . . . . 32
3 Model Validation and Losses Analysis 35
3.1 Compressor map . . . . . . . . . . . . . . . . . . . . . . . . . 35
3.2 Validation of the model . . . . . . . . . . . . . . . . . . . . . 37
3.3 Geometrical parameters identification . . . . . . . . . . . . . 39
3.4 Isentropic and actual maps . . . . . . . . . . . . . . . . . . . 40
3.5 Loss analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.5.1 Impeller skin friction loss . . . . . . . . . . . . . . . . 41
3.5.2 Impeller incidence loss . . . . . . . . . . . . . . . . . . 43
3.5.3 Blade loading loss . . . . . . . . . . . . . . . . . . . . 45
3.6 Conclusion on physical compressor modelling . . . . . . . . . 45
3.7 Alternative Compressor Modelling . . . . . . . . . . . . . . . 46
3.7.1 Results . . . . . . . . . . . . . . . . . . . . . . . . . . 48
4 Theory of Particle Filtering 49
4.1 Models and notation . . . . . . . . . . . . . . . . . . . . . . . 49
4.2 Optimal estimation . . . . . . . . . . . . . . . . . . . . . . . . 50
4.3 Particle Filter Theory . . . . . . . . . . . . . . . . . . . . . . 51
4.3.1 A priori distribution approximation . . . . . . . . . . 52
4.3.2 A posteriori distribution approximation . . . . . . . . 53
4.3.3 Conditional expectation . . . . . . . . . . . . . . . . . 54
4.4 Particle Filter Algorithm summary . . . . . . . . . . . . . . . 55
5 Particle Filter Application 57
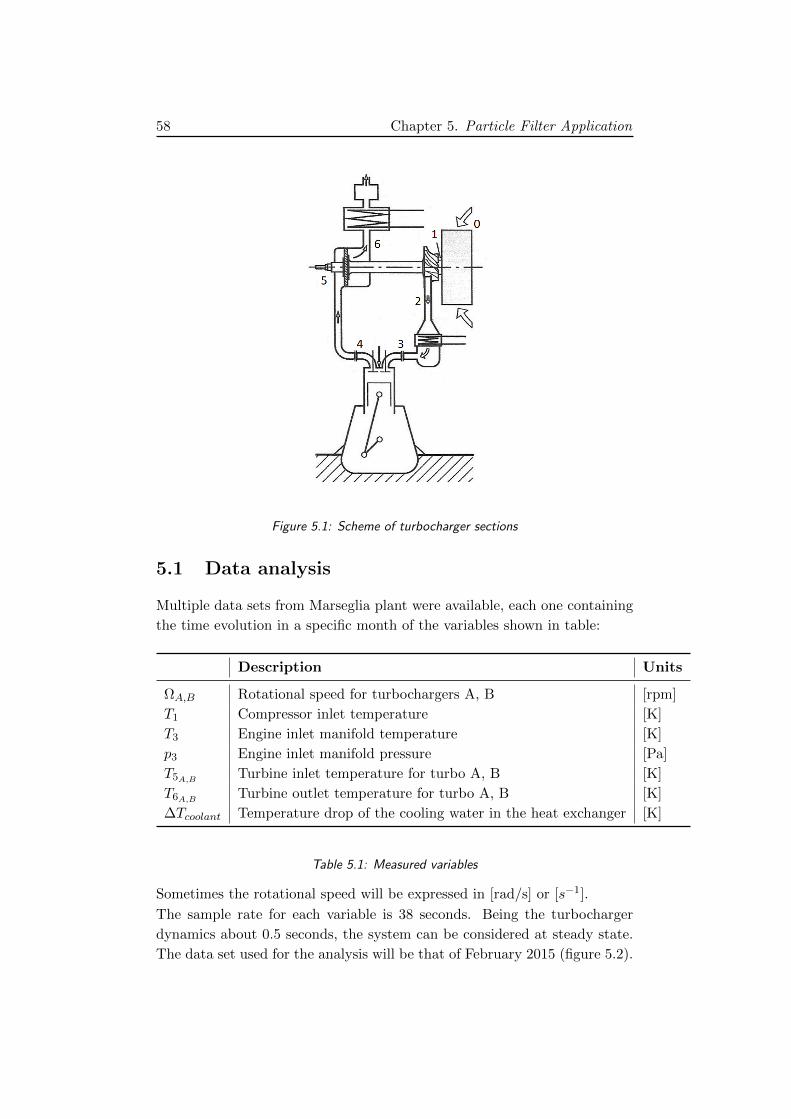
5.1 Data analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
5.1.1 Filtering and normalization . . . . . . . . . . . . . . . 60
5.1.2 Principal Component Analysis . . . . . . . . . . . . . 61
5.2 Compressor Filtering . . . . . . . . . . . . . . . . . . . . . . . 62
5.2.1 Model and prior pdfs . . . . . . . . . . . . . . . . . . . 62
5.2.2 Normalization . . . . . . . . . . . . . . . . . . . . . . . 66
5.2.3 Filtering for t > 0 . . . . . . . . . . . . . . . . . . . . 66
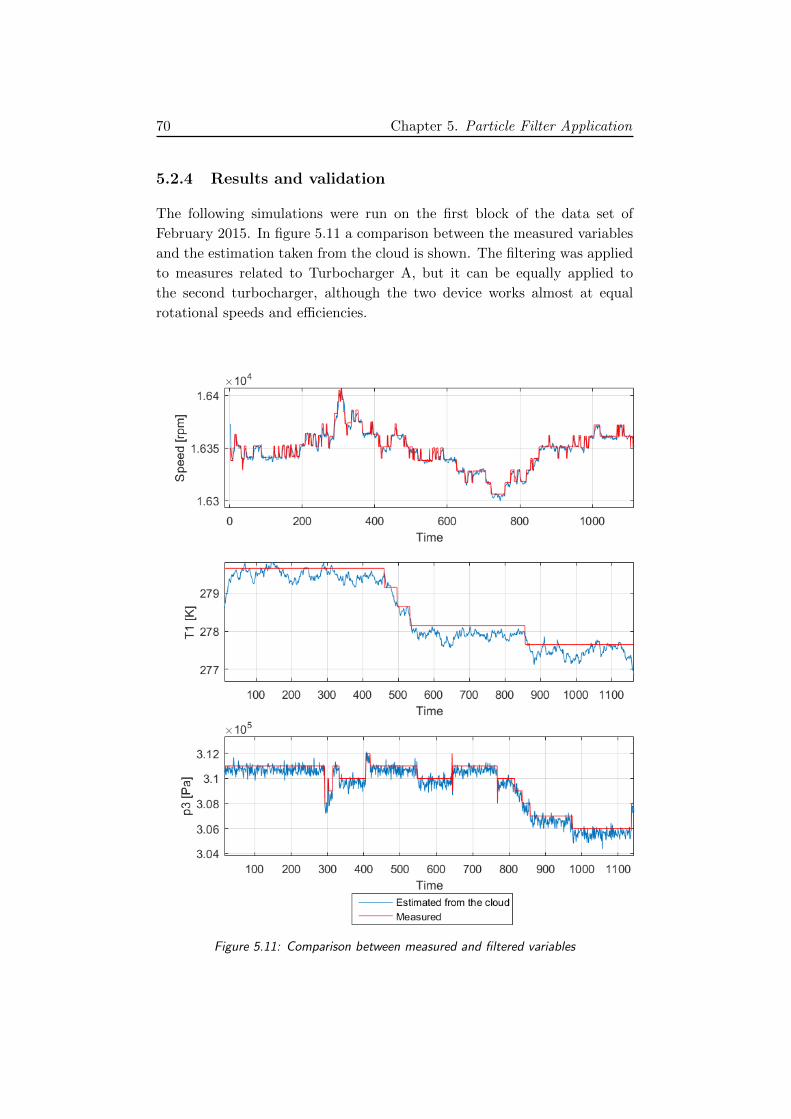
5.2.4 Results and validation . . . . . . . . . . . . . . . . . . 70
5.3 Turbine Filtering overview . . . . . . . . . . . . . . . . . . . . 75
6 Conclusions 79
Page 11
Appendices 81
A Fluid mechanics and thermodynamics equations 83
A.1 Thermodynamic properties of perfect gas . . . . . . . . . . . 83
A.2 Continuity equation . . . . . . . . . . . . . . . . . . . . . . . 83
A.3 First law of thermodynamics . . . . . . . . . . . . . . . . . . 84
A.4 Second law of thermodynamics . . . . . . . . . . . . . . . . . 85
A.5 Moment of momentum - Euler’s turbomachinery equation . . 85
A.6 Compressible flow relations for perfect gases . . . . . . . . . . 86
B Probability and Statistics 87
B.1 Probability density function . . . . . . . . . . . . . . . . . . . 87
B.2 Conditional density (of x given y) . . . . . . . . . . . . . . . . 88
B.3 Bayes update recursion . . . . . . . . . . . . . . . . . . . . . . 88
C Centrifugal compressor data set for validation 91
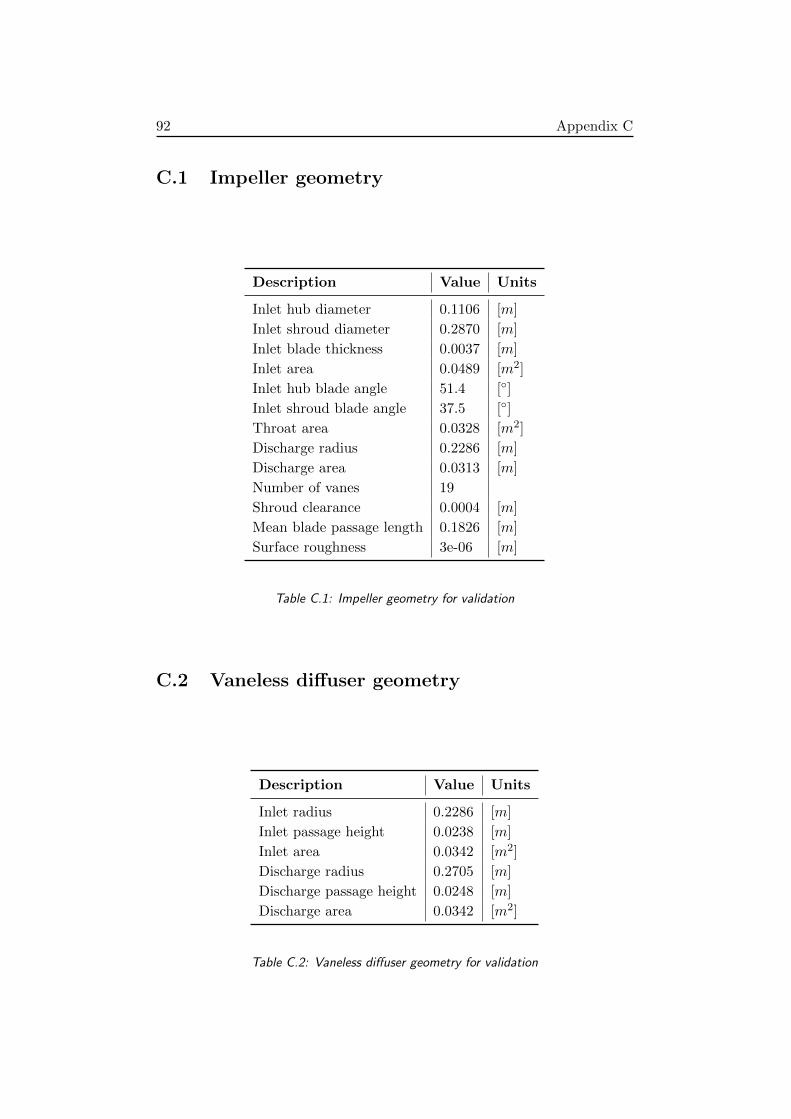
C.1 Impeller geometry . . . . . . . . . . . . . . . . . . . . . . . . 92
C.2 Vaneless diffuser geometry . . . . . . . . . . . . . . . . . . . . 92
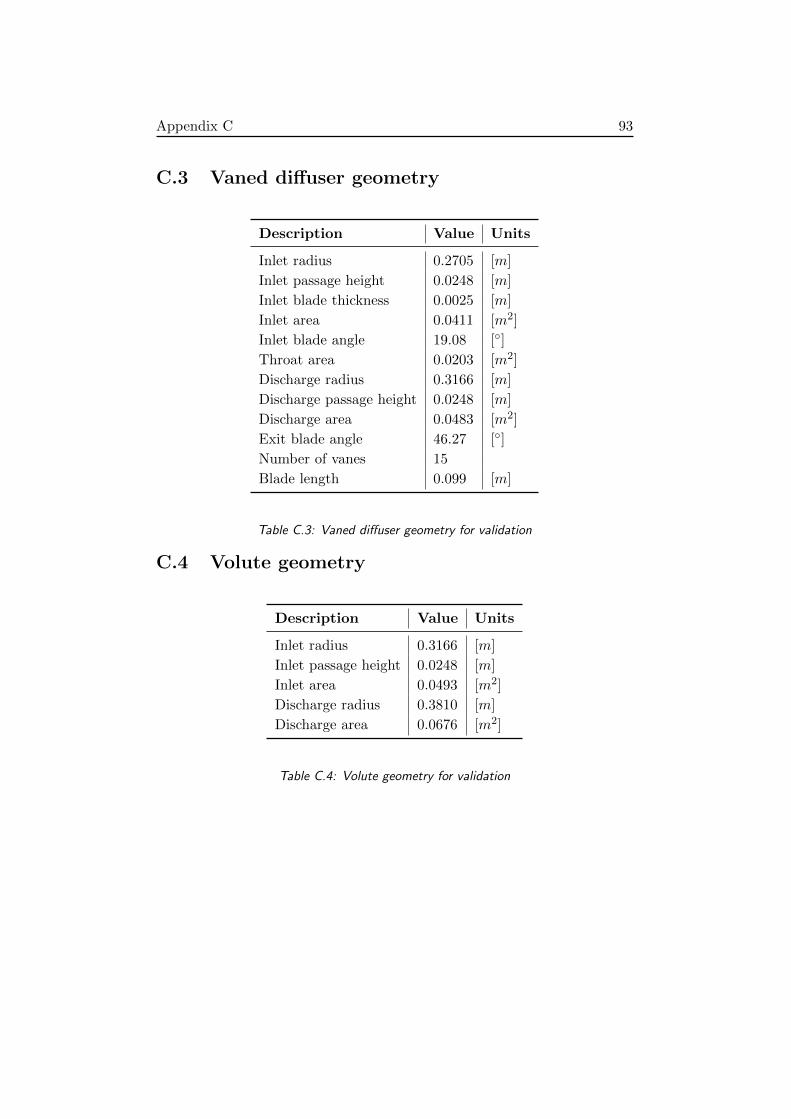
C.3 Vaned diffuser geometry . . . . . . . . . . . . . . . . . . . . . 93
C.4 Volute geometry . . . . . . . . . . . . . . . . . . . . . . . . . 93
Page 13
List of Figures
1.1 Comparison between p-V diagrams of naturally aspirated and
supercharged engine . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 ABB turbocharger structure . . . . . . . . . . . . . . . . . . . 3
1.3 Engine room overview . . . . . . . . . . . . . . . . . . . . . . 5
1.4 Turbocharged engine control loop . . . . . . . . . . . . . . . 6
1.5 Sensoring layout . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.1 ABB TPL-77 impeller . . . . . . . . . . . . . . . . . . . . . . 13
2.2 Cross-sectional view of centrifugal compressor . . . . . . . . . 13
2.3 Cross-sectional view with inlet and outlet velocity triangles [1] 15
2.4 Coordinate system and flow velocities within a turbomachine.
a) Meridional or side view b) Axial view c) Vie looking down
onto a stream surface [1] . . . . . . . . . . . . . . . . . . . . . 16
2.5 AME diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.6 Velocity triangles with and without slip . . . . . . . . . . . . 21
2.7 Mollier diagram for compression process in the impeller . . . 23
2.8 Jet and wake velocity profiles at impeller discharge . . . . . . 26
2.9 Model structure . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.10 Isentropic model diagram . . . . . . . . . . . . . . . . . . . . 29
2.11 Scheme for actual flow computation . . . . . . . . . . . . . . 33
3.1 ABB Compressor characteristic map . . . . . . . . . . . . . . 36
3.2 Isentropic model and experimental data comparison . . . . . 37
3.3 Model with losses and experimental data comparison . . . . . 38
3.4 Compressor isentropic map . . . . . . . . . . . . . . . . . . . 40
3.5 Comparison between model output and experimental maps . 41
3.6 Entropy variation due to skin friction loss for different rota-
tional speeds . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
3.7 Entropy variation due to incidence loss for different rotational
speeds . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
vii
Page 14
3.8 Comparison between relative inlet flow angle and inlet blade
angle for different rotational speeds . . . . . . . . . . . . . . . 44
3.9 Entropy variations in blade loading loss . . . . . . . . . . . . 45
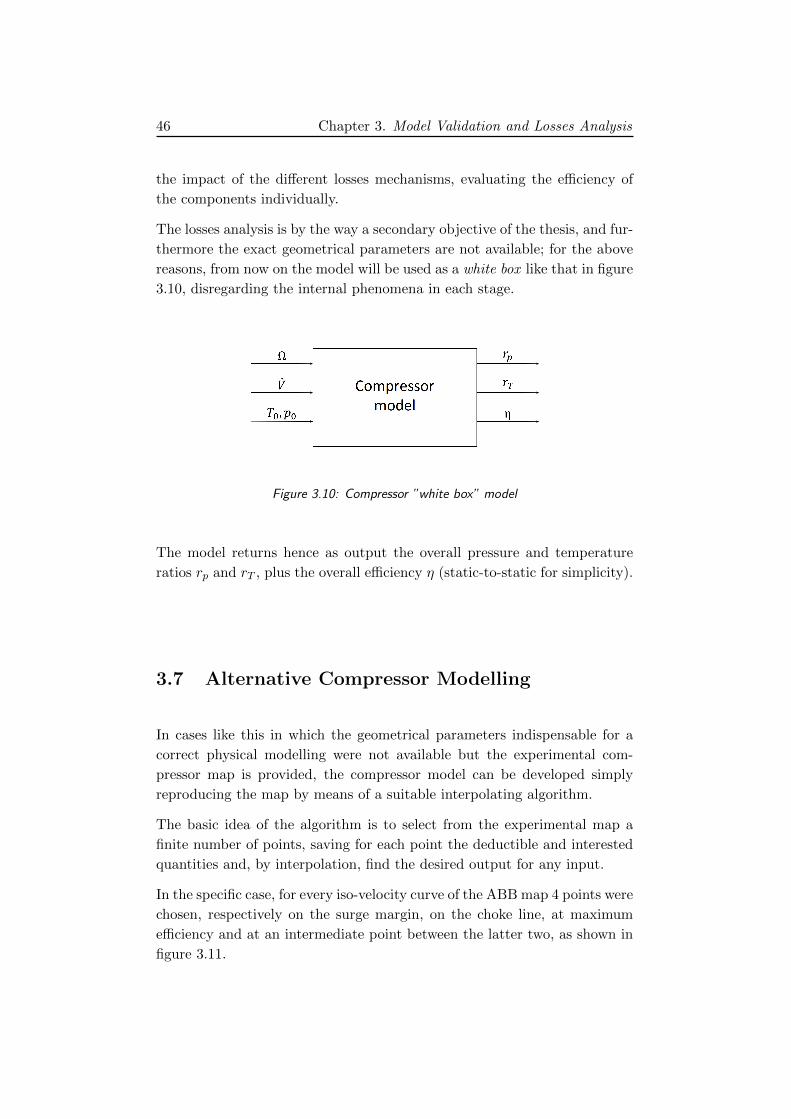
3.10 Compressor ”white box” model . . . . . . . . . . . . . . . . . 46
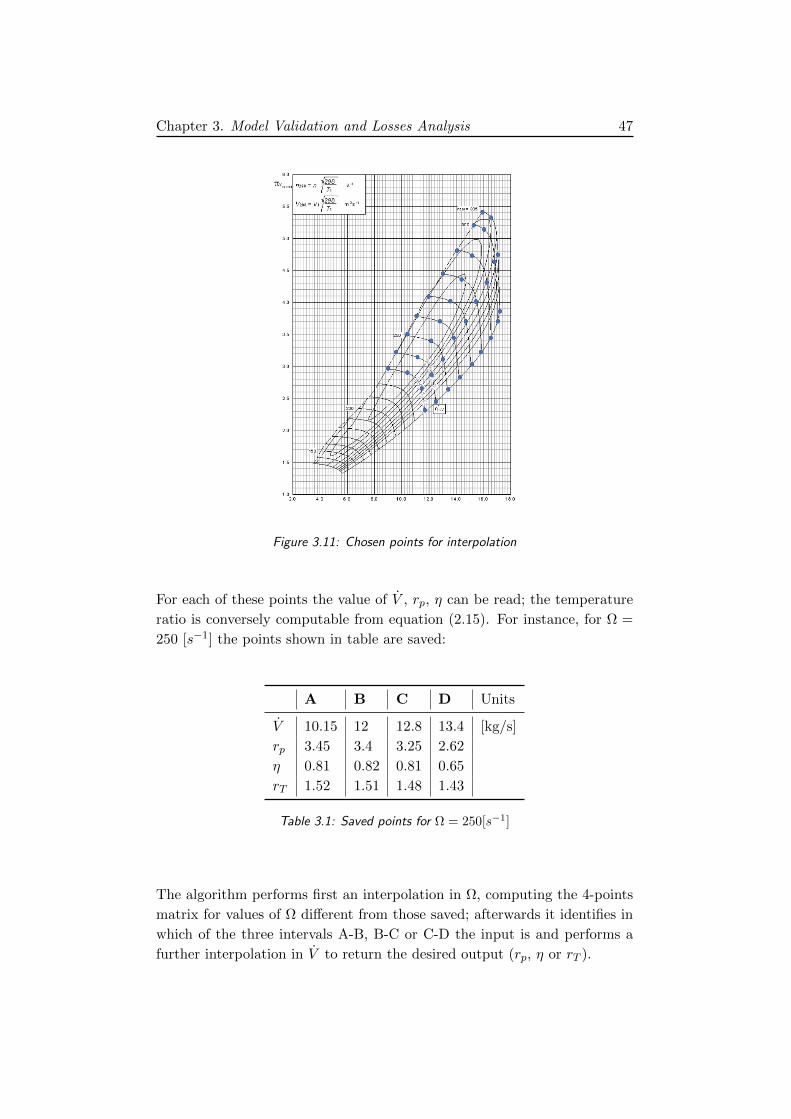
3.11 Chosen points for interpolation . . . . . . . . . . . . . . . . . 47
3.12 Efficiency, pressure ratio and temperature ratio functions . . 48
4.1 Cloud of particles representing the a priori distribution px0 . 52
5.1 Scheme of turbocharger sections . . . . . . . . . . . . . . . . 58
5.2 Set of measures available . . . . . . . . . . . . . . . . . . . . . 59
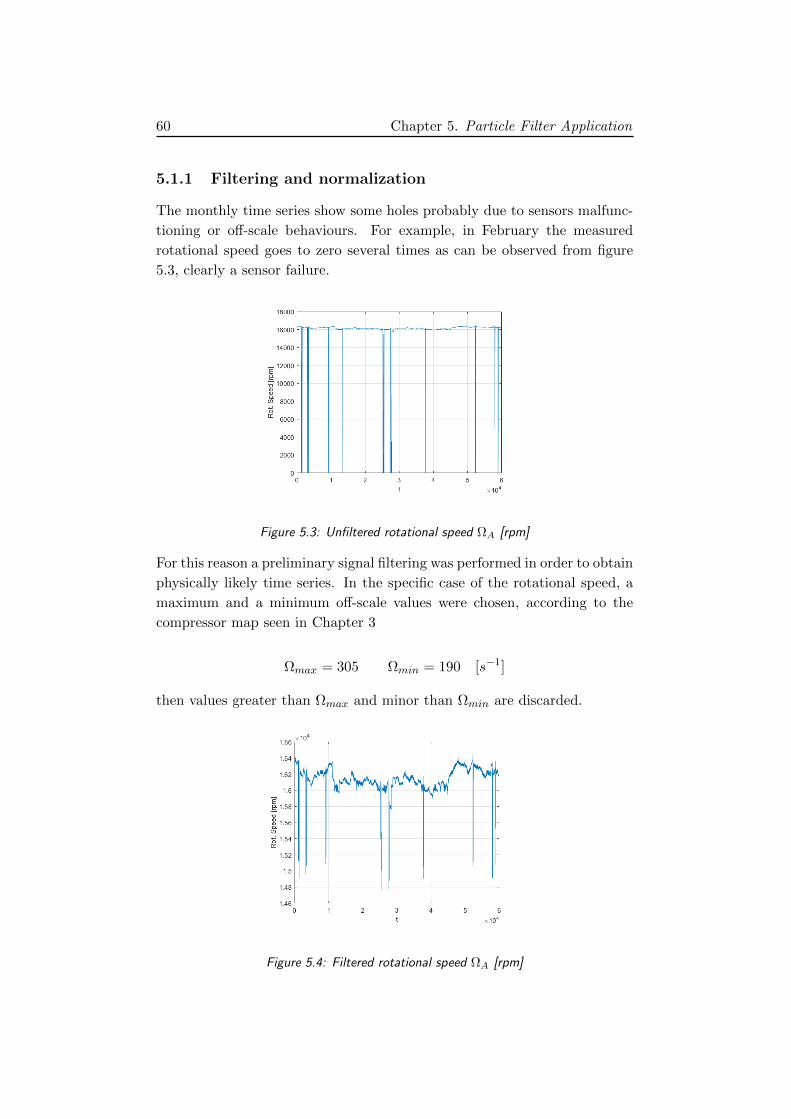
5.3 Unfiltered rotational speed ΩA [rpm] . . . . . . . . . . . . . . 60
5.4 Filtered rotational speed ΩA [rpm] . . . . . . . . . . . . . . . 60
5.5 Prior density of input variables . . . . . . . . . . . . . . . . . 64
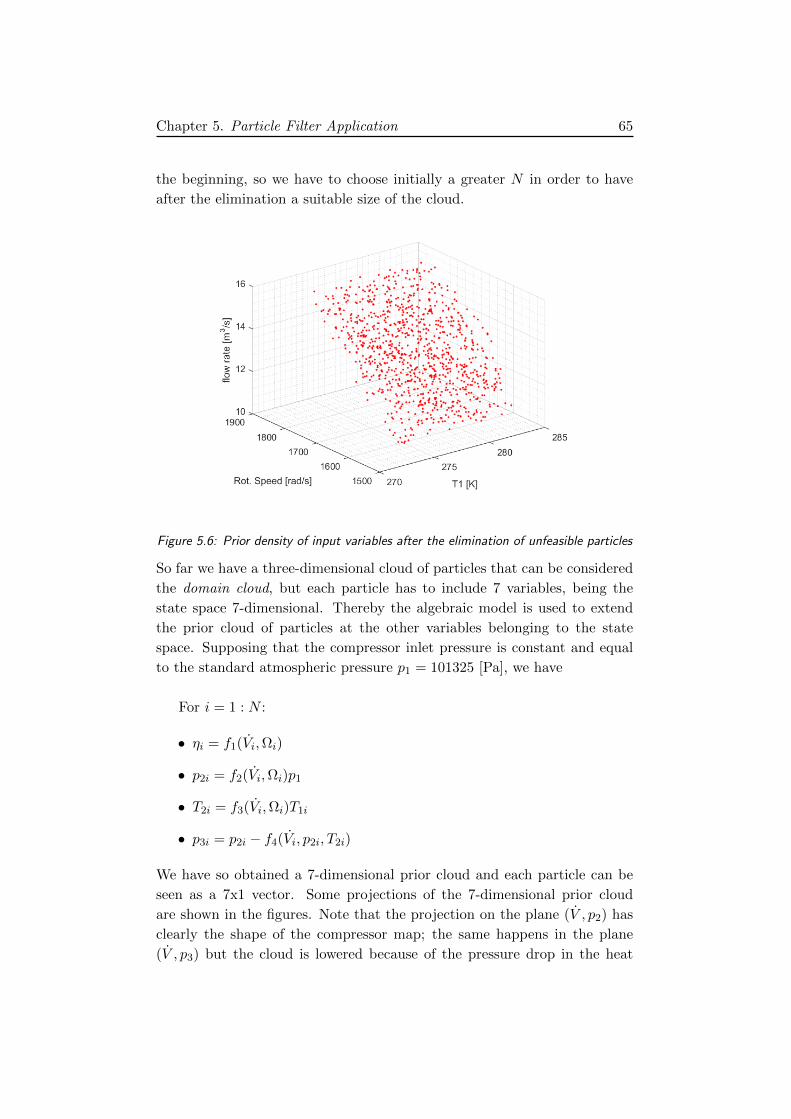
5.6 Prior density of input variables after the elimination of un-
feasible particles . . . . . . . . . . . . . . . . . . . . . . . . . 65
5.8 Scheme of normalization/denormalization procedure . . . . . 66
5.7 Projections of 7-dimensional cloud on some relevant planes . 67
5.9 Sample impoverishmentin in 4 iterations . . . . . . . . . . . . 68
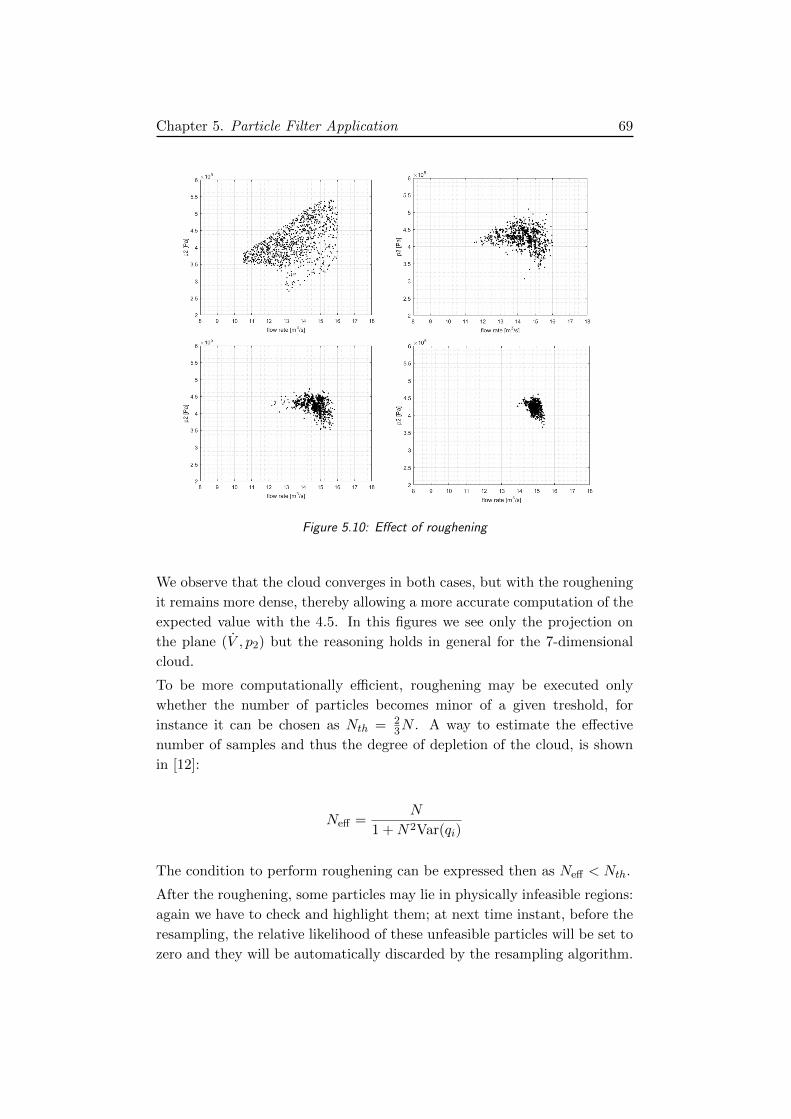
5.10 Effect of roughening . . . . . . . . . . . . . . . . . . . . . . . 69
5.11 Comparison between measured and filtered variables . . . . . 70
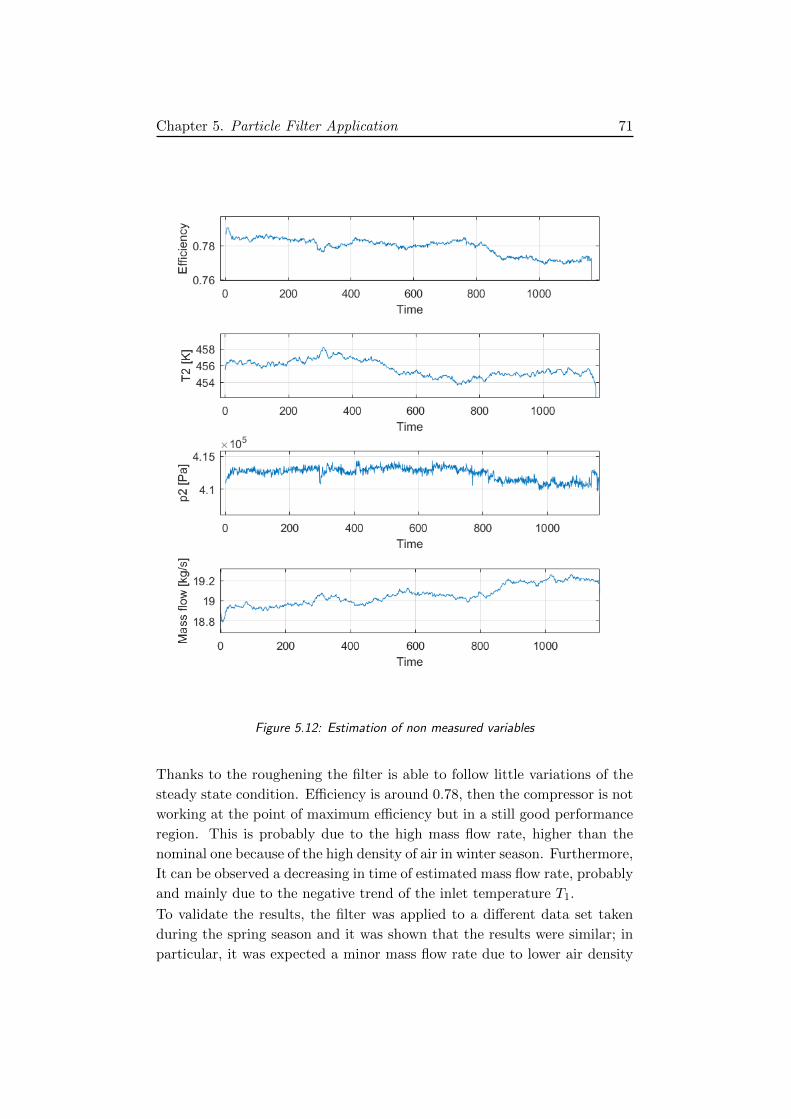
5.12 Estimation of non measured variables . . . . . . . . . . . . . 71
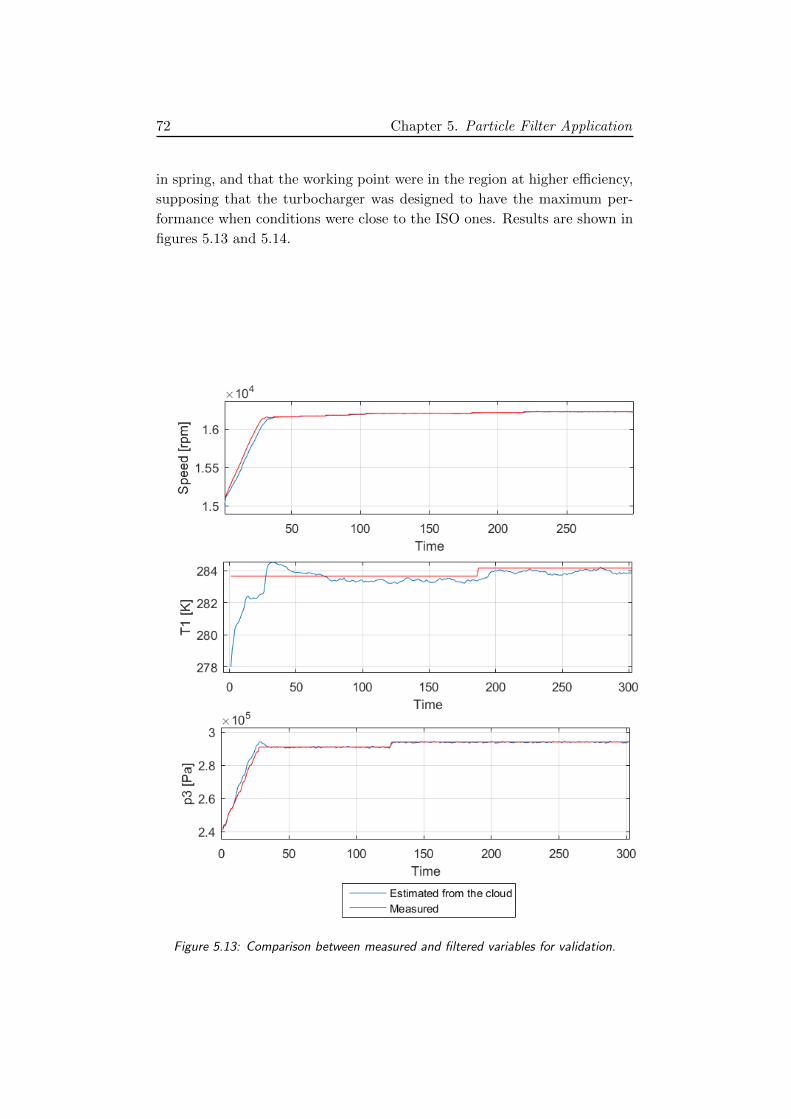
5.13 Comparison between measured and filtered variables for val-
idation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
5.14 Estimation of non measured variables for validation. . . . . . 73
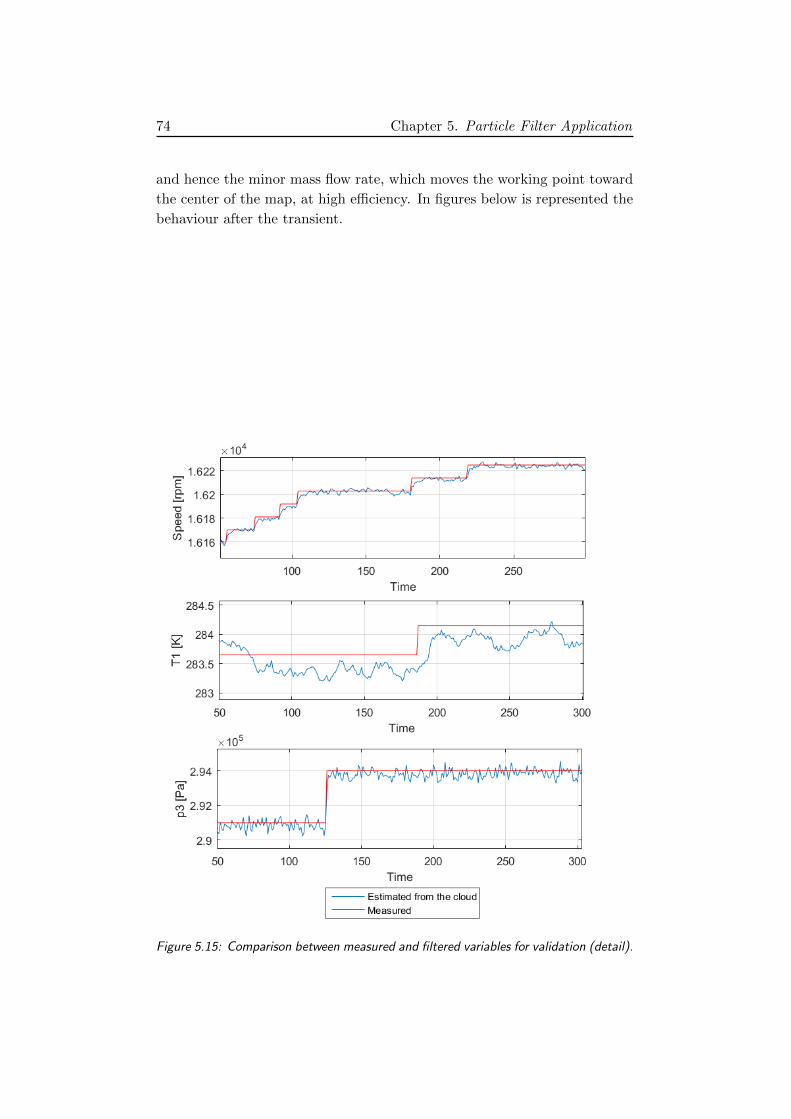
5.15 Comparison between measured and filtered variables for val-
idation (detail). . . . . . . . . . . . . . . . . . . . . . . . . . . 74
5.16 Estimation of non measured variables for validation (detail). . 75
Page 15
List of Tables
3.1 Saved points for Ω = 250[s−1] . . . . . . . . . . . . . . . . . 47
5.1 Measured variables . . . . . . . . . . . . . . . . . . . . . . . . 58
5.2 Normalized percent eigenvalues for different data blocks . . . 62
C.1 Impeller geometry for validation . . . . . . . . . . . . . . . . 92
C.2 Vaneless diffuser geometry for validation . . . . . . . . . . . . 92
C.3 Vaned diffuser geometry for validation . . . . . . . . . . . . . 93
C.4 Volute geometry for validation . . . . . . . . . . . . . . . . . 93
ix
Page 17
Chapter 1
Introduction
A turbocharger is a turbine-driven forced induction device that increases
an internal combustion engine’s efficiency and power output by forcing ex-
tra air into the combustion chamber [17]. More in general, a supercharger
is a mechanical device whose purpose is to increase the inlet air density,
or charge, of an internal combustion engine. The idea dates back to last
years of the nineteenth century, when combustion engine pioneers Diesel
and Daimler recognized the advantage of compressing inlet air of cylinders.
The first publication was yet released in 1905 by Buchi, in which the idea
of drive a turbine with the engine exhaust gases to power the compressor
was shown; however the idea was complex and not followed immediately
by a practical realization. The first commercial turbocharged diesel engine
appeared in 1924, after years of development leaded by Buchi, his employer
Sulzer Brothers and Brown-Boveri & Co. Ltd. The second World War was
the impetus to major developments in engines and turbomachinery, conse-
quently promoting the spreading of turbochargers. In the following years
more and more engines were turbocharged, and turbocharging was even in-
troduced in power generation and locomotive applications. To see turbo also
in automotive market was necessary to wait until 1970’s, when the oil crisis
and increasing stringent emission tresholds forced the industry to turn to
turbocharging. Nowadays, turbocharging finds application even in areas like
spark ignition engines and fuel cells, and non-turbocharged Diesel engines
are nearly obsolete.
1.1 Operation principles of turbochargers
The introduction of air into an engine cylinder at a density greater than
ambient allows a proportional increase of the fuel that can be burnt, thereby
1
Page 18
2 Chapter 1. Introduction
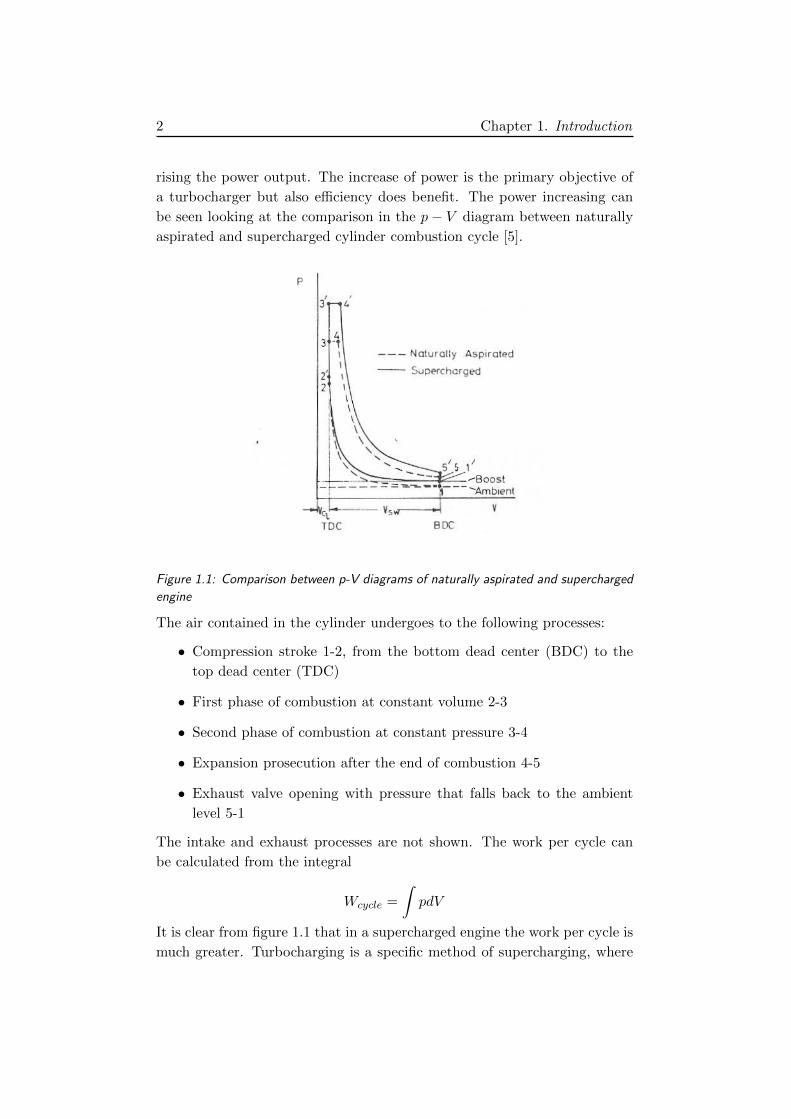
rising the power output. The increase of power is the primary objective of
a turbocharger but also efficiency does benefit. The power increasing can
be seen looking at the comparison in the p− V diagram between naturally
aspirated and supercharged cylinder combustion cycle [5].
Figure 1.1: Comparison between p-V diagrams of naturally aspirated and supercharged
engine
The air contained in the cylinder undergoes to the following processes:
• Compression stroke 1-2, from the bottom dead center (BDC) to the
top dead center (TDC)
• First phase of combustion at constant volume 2-3
• Second phase of combustion at constant pressure 3-4
• Expansion prosecution after the end of combustion 4-5
• Exhaust valve opening with pressure that falls back to the ambient
level 5-1
The intake and exhaust processes are not shown. The work per cycle can
be calculated from the integral
Wcycle =
∫pdV
It is clear from figure 1.1 that in a supercharged engine the work per cycle is
much greater. Turbocharging is a specific method of supercharging, where
Page 19
Chapter 1. Introduction 3
energy contained in the exhaust gases of the engine is employed to drive a
gas turbine, which in turn drives a centrifugal compressor to feed the engine
cylinders.
1.2 Turbocharger structure
The main components of a turbocharger are the following:
• Compressor
• Turbine
• Charge cooler
• Center housing hub rotating assembly (CHRA)
• Filter/Silencer
Figure 1.2: ABB turbocharger structure
The compressor is almost universally of the radial outflow type (i.e. cen-
trifugal). Nowadays it is preferred to the axial one because of its convenient
combination of delivered pressure ratio, size and production costs.
The turbine is usually radial in compact and low power applications, such
as in automotive field. For high power application in general a single stage
axial turbine is preferred.
The charge cooler aim is to further increase the air density after the com-
pression. In fact the compression is accompanied by a temperature rise, and
looking at the perfect gas law
Page 20
4 Chapter 1. Introduction
ρ =p
RT
it is possible to notice that a decrease in temperature causes an increase
in density, permitting then to send more mass of air in the cylinders and
to burn more fuel per cycle. Across the cooler there is a pressure drop,
which however is not relevant and do not undermines the utility of such
device. Usually an air-to-water heat exchanger is employed, and since it is
positioned between the compressor and the engine the device often it takes
the name of intercooler.
The CHRA is the structure in which the shaft connecting compressor and
turbine, the bearings and the lubricating/cooling systems are contained.
The silencer is necessary because of the huge amount of noise produced by
the compressor side, which insulating material cannot absorb completely.
It acts also as a filter for the air and for this reason it is mounted before
the compressor intake. Its operation is based on the principle of sound
absorption, sound waves arising in the compressor are reflected and damped.
1.3 Types of turbocharging
1.3.1 Constant pressure turbocharging
In this configuration, that was the first developed, gases exiting from the
engine cylinders are damped in a large exhaust manifold in order to deliver
a steady flow to the turbine. In fact turbines work better with steady flows,
while the gas coming from cylinders is inherently unstable, then damping
them in a large chamber makes the turbine work at higher efficiency.
1.3.2 Pulse system turbocharging
The disadvantage of the constant pressure system is that the high kinetic
energy of gases leaving the engine is not employed by the turbine. The
pulse system by contrary connects the engine with the turbine by means
of short narrow exhaust manifolds, making possible the transfer of kinetic
energy in form of pressure waves. As already said the flow leaving the
engine is highly unsteady, so that to ensure a correct energy recovery by the
turbine a shrewdness must be implemented, that is connecting the narrow
exhaust pipes from several cylinders in order to obtain an average overall
steady turbine flow. This method is in general preferable since it increases
available energy and turbine efficiency, but has the cons of a more difficult
design.
Page 21
Chapter 1. Introduction 5
1.4 Problem statement and motivation
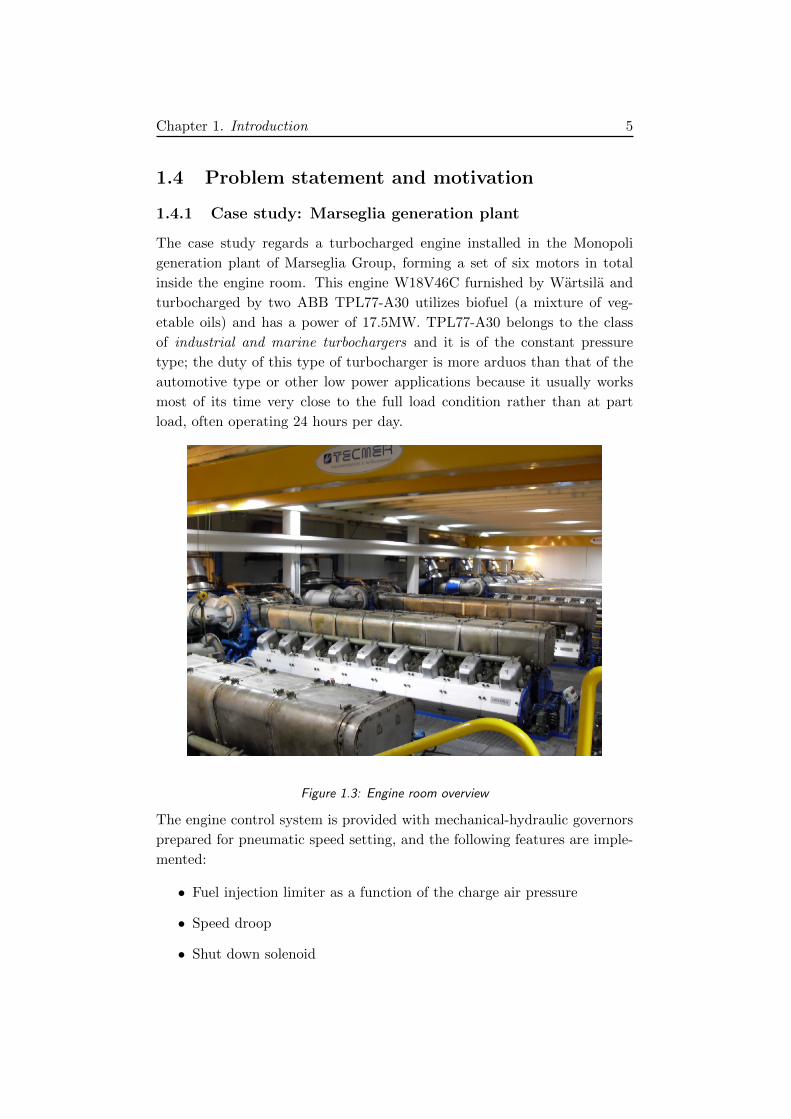
1.4.1 Case study: Marseglia generation plant
The case study regards a turbocharged engine installed in the Monopoli
generation plant of Marseglia Group, forming a set of six motors in total
inside the engine room. This engine W18V46C furnished by Wartsila and
turbocharged by two ABB TPL77-A30 utilizes biofuel (a mixture of veg-
etable oils) and has a power of 17.5MW. TPL77-A30 belongs to the class
of industrial and marine turbochargers and it is of the constant pressure
type; the duty of this type of turbocharger is more arduos than that of the
automotive type or other low power applications because it usually works
most of its time very close to the full load condition rather than at part
load, often operating 24 hours per day.
Figure 1.3: Engine room overview
The engine control system is provided with mechanical-hydraulic governors
prepared for pneumatic speed setting, and the following features are imple-
mented:
• Fuel injection limiter as a function of the charge air pressure
• Speed droop
• Shut down solenoid
Page 22
6 Chapter 1. Introduction
The present work is most oriented on identification and monitoring on tur-
bochargers’ variables, using the engine features as boundary conditions for
the problem. For this reason the engine control system will not be taken in
consideration, making the assumption that the turbocharged engine is well
controlled.
1.4.2 Monitoring system
In a turbocharged Diesel engine, the turbocharger performance is very criti-
cal in the overall system: a 1% decrease of turbocharger performance corre-
sponds about to a 5% decrease of the engine performance. The turbocharger
efficiency can be calculated with the following expression [4] [6]
ηTC = ηmηT ηc (1.1)
where:
• ηm mechanical efficiency at the shaft
• ηT turbine efficiency
• ηc compressor efficiency
The major losses in a turbocharger occur in the compressor, rather than
in the turbine or at the shaft, making the estimation of the compressor
efficiency a fundamental point for the monitoring system. This estimation
algorithm will be incorporated in the supervision unit of the engine control
loop:
Figure 1.4: Turbocharged engine control loop
Page 23
Chapter 1. Introduction 7
1.4.3 Sensoring layout
In figure 1.5 it is shown what should be the layout of sensors in the tur-
bocharged engine; actually the turbochargers are two, let us call them A
and B. Each turbocharger is equipped with a magnetic pick-up measuring
the rotational speed, plus temperature and pressure sensors located in dif-
ferent points of the engine. In the specific case, not all of these sensors are
mounted; in particular, only the following measures are available:
• Speed of both turbochargers A and B
• Temperatures at compressors inlet A and B
• Temperature and pressure at the engine inlet manifold
• Temperatures before and after the turbines
The unavailability of some sensors is due to critical issues typical of these
type of installations, which discourages the employment of the full layout of
figure 1.5. For example, while in process compressors the flow rate is usually
measured, in turbochargers great vibrations take place making the place-
ment of a sensor very difficult. The same problem arise when talking about
pressure and temperature ratio, which need to be located is safe points, far
enough from vibration, impervious zones or points subject to fouling. It is
then clear how arises the necessity to estimate the non-measured variables
to keep monitored the working points of the 4 turbomachines involved in
the plant, in particular their efficiencies. For each of them, centrifugal com-
pressors in particular, efficiency should always be close to the optimal one
in order to minimize the losses, maximize the supercharging of the engine
and consequently maximizing the power production.
Page 24
8 Chapter 1. Introduction
Figure 1.5: Sensoring layout
1.5 Structure of the thesis
This Master’s thesis is composed of two main parts. In the first a physical
model for the centrifugal compressor is developed, validated and applied to
analyze some typical loss mechanisms of this machine. In the second part,
the theory of Particle Filtering is presented and applied together with the
model to optimally estimate some non-measured variables in the compressor.
In detail, chapters are organized in the following way:
• Chapter 1 introduces the topic of turbochargers, describing the struc-
ture and the operation principles. Next an introduction to the problem
is presented, together with the description of the case study plant.
• Chapter 2 treats the theory and the philosophy for centrifugal com-
pressors modelling. The notions of loss and efficiency are introduced,
with a description of most common kinds of losses.
• Chapter 3 provides the validation of the physical model and shows
how it can be applied to infer the flow conditions and to analyze some
of the losses described in the previous chapter.
Page 25
Chapter 1. Introduction 9
• Chapter 4 introduces to Bayesian inference problem and presents in
detail the theory of non-linear Particle Filtering.
• Chapter 5 shows how the analysis of the available experimental data
was performed. Next, it describes how the Particle Filter can be ap-
plied to optimally estimate non measured variables in turbocharger’s
compressor and turbine.
• Chapter 6 outlines the conclusions of the work and proposes possible
future perspectives and enhancements.
• Appendix A introduces fundamental equations of thermodynamics and
fluid mechanics, on which the compressor modelling theory is based.
• Appendix B provides some notions of probability theory and statistics,
introductory to the non-linear Bayesian filtering.
• Appendix C furnishes the data set used for the validation of the com-
pressor model.
Page 27
Chapter 2
Centrifugal Compressor
Modelling
In commercial turbochargers, the charging device universally adopted is the
centrifugal compressor. With respect to the axial compressor, it is more
compact, efficient, inexpensive and rotates at very high speed so that it
can be directly coupled to the gas turbine. The charging device has the
task to deliver to the inlet manifold of the engine a suitable boost pressure,
greater than the atmospheric one. Centrifugal compressor carries out this
task by whirling the fluid outward, thereby rising its angular momentum
and consequently, as will be seen, increasing its pressure and density.
2.1 Motivation for physical compressor modelling
Usually in industrial applications, variables such as fluid temperatures, pres-
sures and flow rates (from which the compressor behaviour, stability and
efficiency can be monitored) are measured only at the compressor inlet and
outlet, almost nothing can then be deduced about what is happening inside
the compressor and in each component. Physical modelling permits to work
out this problem, allowing to build a procedure with which the trend of
internal compressor variables and efficiencies in different sections can be in-
ferred. In the turbochargers field, compressor modelling has a primary role
in the overall turbocharged engine simulator. It finds application even in
the design phase of centrifugal compressors, where a performance prediction
procedure is necessary to ensure that the designed geometry is suitable for
a future correct operation of the machine or to compare and assess some
possible optimizations of mechanical features.
Compressor modelling can be faced in different manners. Typically the
11
Page 28
12 Chapter 2. Centrifugal Compressor Modelling
physical modelling strategies are distinguished in three main categories, de-
pending on the number of dimensions in which the analysis is carried out:
• 0D-1D modelling, that use the fundamental equations of the ther-
modynamics and other first engineering principles, where the chosen
coordinate is the principal direction of the fluid.
• 2-dimensional modelling.
• 3-dimensional modelling, realized by means of CFD.
Computational FluidDynamics is obviously the most accurate and physically
reliable modelling technique, but often the huge required computational
effort discourages its employment in favour of a simplified and almost equally
reliable 1D modelling.
2.1.1 1D Modelling
In this work the one-dimensional modelling technique is used. It comprises
a mix of one-dimensional gas thermodynamics, empirical flow models and
loss correlations, used to analyze the gas flow process across the different
components of the centrifugal compressor. The procedure consists, as will
be seen in detail, in separately considering the compressor’s components
and to calculate for each of them the discharge conditions from available
inlet conditions, and then to use the former as inlet conditions in the next
component.
2.2 Compressor structure
The centrifugal compressor is constituted by stationary and dynamic com-
ponents. Usually it is modelled as the series of 5 elements:
• The compressor intake (inlet section 0 - outlet section 1), that is the
converging duct in which the fluid is drawn and axially directed toward
the eye of the impeller; in some applications, at its end inlet guided
vanes are mounted in order to minimize dynamically the incidence loss
at impeller inlet.
• The impeller (1-2), the rotating part where the work is transferred
from the blades to the fluid; the initial part is called inducer and its
function is to smoothly draw the entering distorted flow and to provide
as uniform a flow profile as possible. The surface closest to the axis
of rotation is called hub, while the shroud is the farthest. Usually in
Page 29
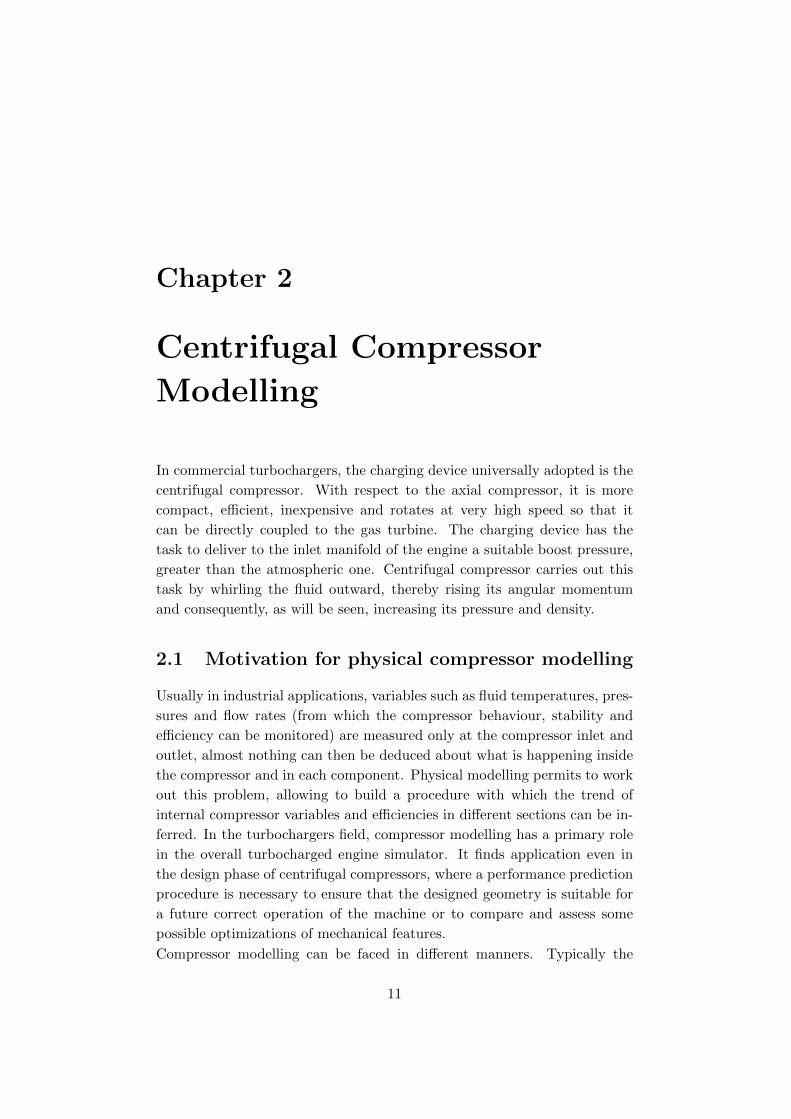
Chapter 2. Centrifugal Compressor Modelling 13
turbocharger applications the impeller is unshrouded, i.e. it is open
and rotates within a fixed casing.
Figure 2.1: ABB TPL-77 impeller
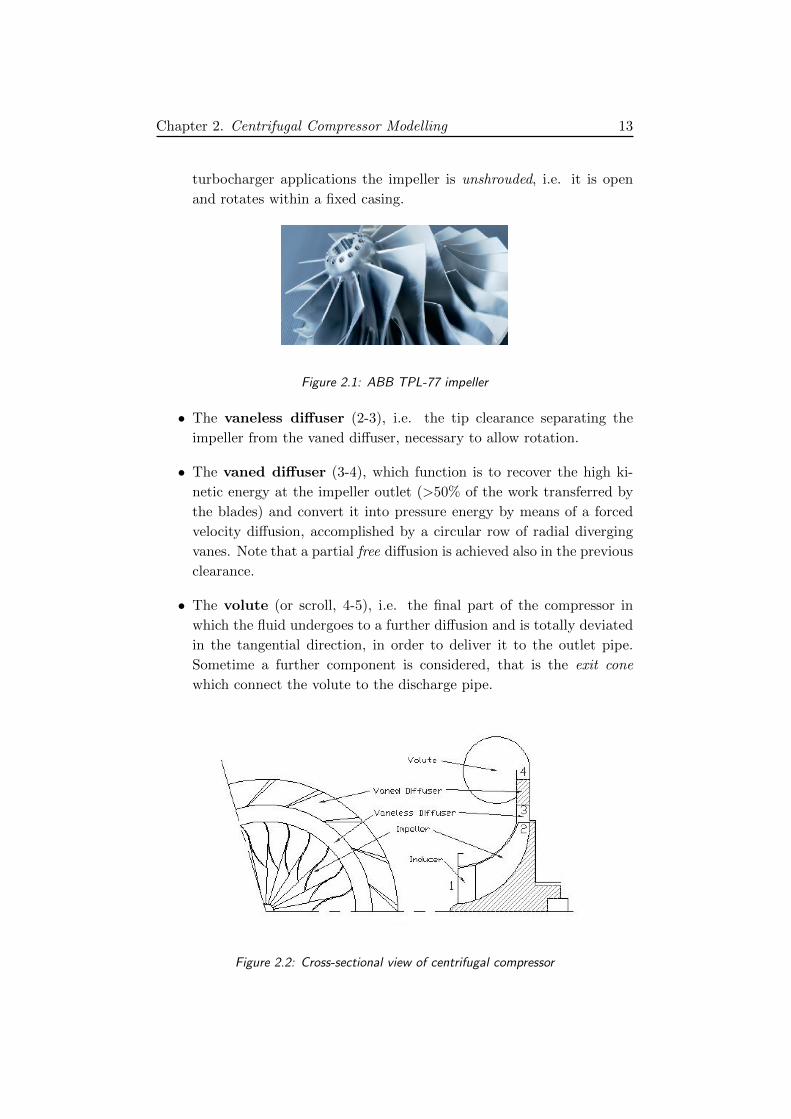
• The vaneless diffuser (2-3), i.e. the tip clearance separating the
impeller from the vaned diffuser, necessary to allow rotation.
• The vaned diffuser (3-4), which function is to recover the high ki-
netic energy at the impeller outlet (>50% of the work transferred by
the blades) and convert it into pressure energy by means of a forced
velocity diffusion, accomplished by a circular row of radial diverging
vanes. Note that a partial free diffusion is achieved also in the previous
clearance.
• The volute (or scroll, 4-5), i.e. the final part of the compressor in
which the fluid undergoes to a further diffusion and is totally deviated
in the tangential direction, in order to deliver it to the outlet pipe.
Sometime a further component is considered, that is the exit cone
which connect the volute to the discharge pipe.
Figure 2.2: Cross-sectional view of centrifugal compressor
Page 30
14 Chapter 2. Centrifugal Compressor Modelling
Different types of flow are recognizable in these components:
• Straight flow in stationary ducts, e.g. in compressor intake and exit
cone.
• Guided swirling flow in vaned diffuser and prewhirl vanes.
• Non-guided swirling flow in tip clearance and volute.
• Flow in rotating duct (impeller).
In this chapter will be shown how to build a 1-dimensional procedure to
describe all these types of flows in centrifugal compressor in order to obtain
an accurate physical model. For thermodynamics and fluid mechanics first
principles see Appendix A.
2.3 Preliminary tools and conventions
2.3.1 Coordinate system
Observing the shape of the centrifugal compressor and of turbomachines
in general it results natural to adopt a cylindrical polar coordinate system
aligned with the axis of rotation. Three coordinates are then defined:
• Axial x
• Radial r
• Tangential θ
2.3.2 Absolute and relative velocities
In a fixed frame of reference (i.e. in every part of the compressor except the
impeller) the absolute velocity in a stationary duct is the vector sum of the
velocities along the three coordinates:
c =√c2x + c2
r + c2θ
but it is useful to define also the meridional velocity
cm =√c2x + c2
r
that can be seen as the projections of the velocity into a plane containing
the axis of the machine.
Page 31
Chapter 2. Centrifugal Compressor Modelling 15
In the impeller, the rotating component of the compressor, the flow passes
through the channels formed by the rotating blades, and the analysis is
made with respect to a rotating frame of reference. In this rotating frame
makes sense to consider the relative velocity instead of the absolute one,
defined as the vector difference between the absolute velocity and the local
blade velocity U = RΩ, where R is the local radius (for instance R = R1 at
impeller inlet, R = R2 a outlet) and Ω is the rotational speed:
−→w = −→c −−→U
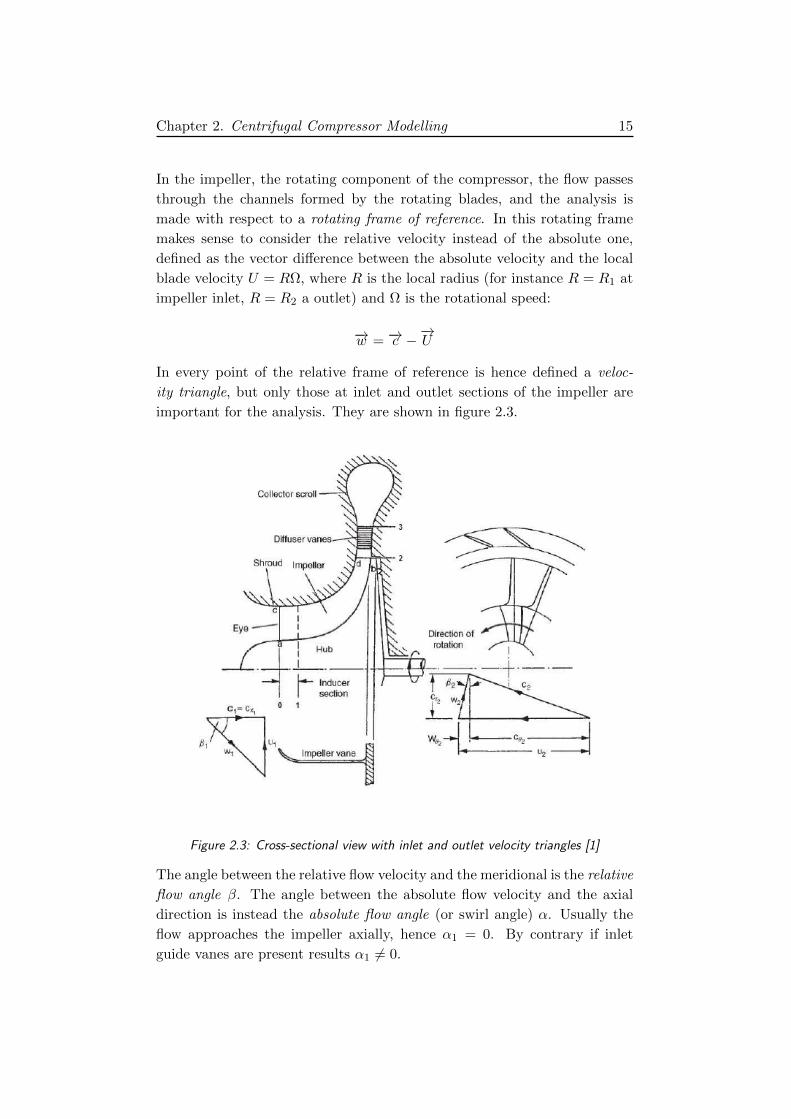
In every point of the relative frame of reference is hence defined a veloc-
ity triangle, but only those at inlet and outlet sections of the impeller are
important for the analysis. They are shown in figure 2.3.
Figure 2.3: Cross-sectional view with inlet and outlet velocity triangles [1]
The angle between the relative flow velocity and the meridional is the relative
flow angle β. The angle between the absolute flow velocity and the axial
direction is instead the absolute flow angle (or swirl angle) α. Usually the
flow approaches the impeller axially, hence α1 = 0. By contrary if inlet
guide vanes are present results α1 6= 0.
Page 32
16 Chapter 2. Centrifugal Compressor Modelling
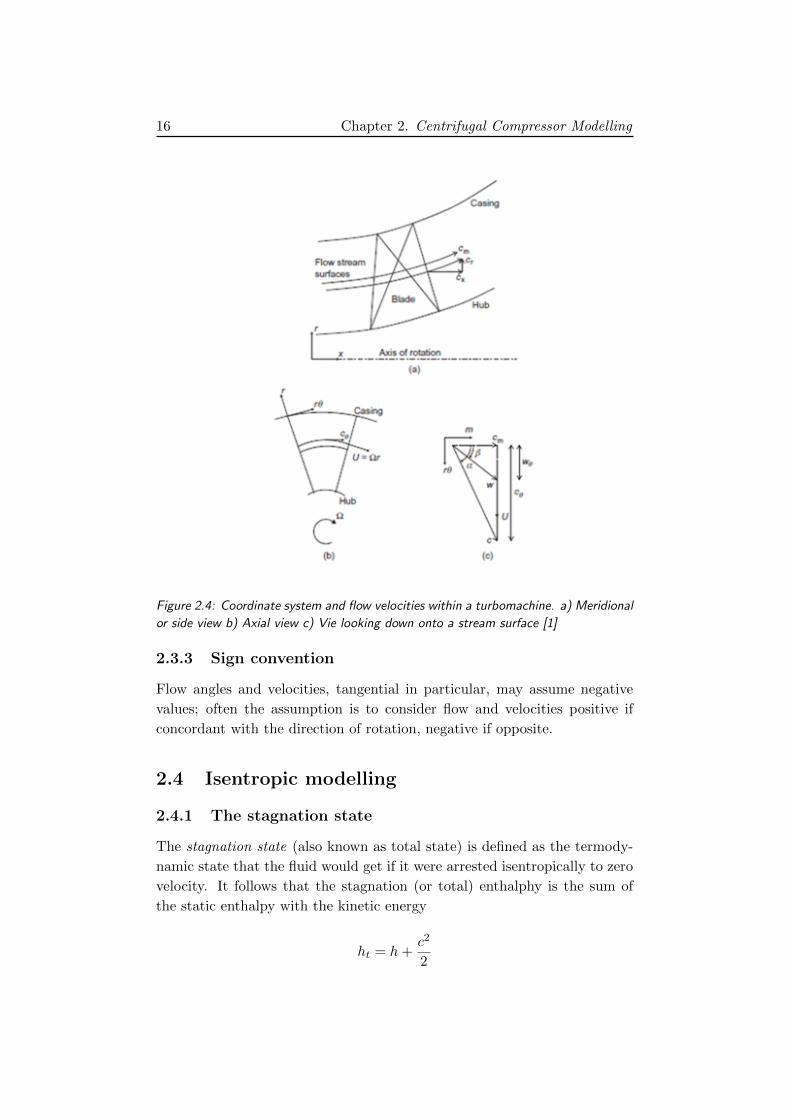
Figure 2.4: Coordinate system and flow velocities within a turbomachine. a) Meridional
or side view b) Axial view c) Vie looking down onto a stream surface [1]
2.3.3 Sign convention
Flow angles and velocities, tangential in particular, may assume negative
values; often the assumption is to consider flow and velocities positive if
concordant with the direction of rotation, negative if opposite.
2.4 Isentropic modelling
2.4.1 The stagnation state
The stagnation state (also known as total state) is defined as the termody-
namic state that the fluid would get if it were arrested isentropically to zero
velocity. It follows that the stagnation (or total) enthalphy is the sum of
the static enthalpy with the kinetic energy
ht = h+c2
2
Page 33
Chapter 2. Centrifugal Compressor Modelling 17
In centrifugal compressors it is usually considered h = cpT , where cp is the
specific heat at constant pressure. Hence the stagnation temperature, or
total temperature, can be expressed as
Tt = T +c2
2cp
Recalling now the relationships linking the specific heats and the isentropic
exponent γ (appendix A), cp can be expressed as
cp =γR
γ − 1
Then we have
Tt = T(
1 +γ − 1
2
c2
γRT
)Introducing the Mach number, as the ratio between the local absolute ve-
locity and the velocity of sound
M =c
cso=
c√γRT
(2.1)
we obtain finally the expression of the stagnation temperature as a function
of the static temperature and Mach number only
Tt = T(
1 +γ − 1
2M2)
(2.2)
The definition of stagnation pressure and density is straightforward (see
appendix A):
pt = p(
1 +γ − 1
2M2) γγ−1
(2.3)
ρt = ρ(
1 +γ − 1
2M2) 1γ−1
(2.4)
In the rotating frame of reference it is defined also the relative Mach number
M ′ =w√γRT
(2.5)
The first law of thermodynamics for turbomachines treating gas is usu-
ally expressed in the following form
Pcm
= ht2 − ht1 (2.6)
Page 34
18 Chapter 2. Centrifugal Compressor Modelling
where Pcm is the power absorbed by the compressor per unit of mass flow rate.
It can be observed that if the work transfer to or from the fluid is zero, as
happens in stationary ducts, the stagnation enthalpy and consequently the
stagnation temperature is constant, no care if the flow is isentropic or not.
We will refer to this property as stagnation enthalpy conservation. If the
flow is even isentropic, the stagnation pressure and density are also constant.
2.4.2 The relative stagnation state and Rothalpy
In the impeller the work transfer is different from zero, then it is necessary
to find a property similar to total enthalpy that is conserved through the
flow path. Defining the relative stagnation enthalpy as the sum of the static
enthalpy with the relative kinetic energy
h′t = h+w2
2(2.7)
it is possible to demonstrate that the quantity that remains constant across
the impeller is the so called rothalpy, which is defined as
I = h′t −U2
2= cpT +
w2
2− U2
2= constant (2.8)
2.4.3 Adimensional Mass Flow Rate Equation
In this section the fundamental adimensional mass flow rate equation, on
which the solving procedure of each duct is based, is derived and discussed.
From now on we will refer to it as AME.
We start from the continuity equation m = ρcA.
Using the (2.1) and the perfect gas law:
m
A=
p
RTM√γRT
Now invert the stagnation relationships (2.2)(2.3) and substitute to p and
T . Rearranging, the first form of the AME is obtained:
m√
RTtγ
Apt= M
(1 +
γ − 1
2M2)− γ+1
2(γ−1)(2.9)
The term on the left hand side is a function of the mass flow, flow area and
stagnation state; the right hand side is instead a function f(M) of the Mach
number only, having the shape of figure 2.5.
As can be observed, ifM < 1 the function has a behaviour such that it can be
solved for the Mach number, usually iteratively with the Newton-Raphson
Page 35
Chapter 2. Centrifugal Compressor Modelling 19
Figure 2.5: AME diagram
method (about 4-5 steps to convergence). When the flow reaches the sonic
speed (M = 1) at the minimum flow area of the flow path (throat) it is
said to be choked and the mass flow rate cannot further increase. In choked
flow conditions, depending on the geometry of the compressor, subsonic or
supersonic speed flow may occur in some section of the compressor; having
the AME two solutions (a subsonic and a supersonic one), the correct one
must be chosen accordingly, observing that a supersonic flow (M > 1) can
only be achieved in an expanding area downstream of the throat.
2.4.4 Use AME to calculate fluid flow process
Consider the compressor intake, i.e. the converging duct previous to the
impeller, with inlet and outlet sections respectively 0 and 1. Suppose it is
adiabatic and isentropic: then Tt and pt are constant along the duct and
equal to the respective inlet stagnation conditions, which are supposed to
be known (usually the atmospheric ones)
Tt = Tt0 pt = pt0
Equation (2.9) holds in every point of the duct, in particular at the outlet
section, thus the Mach number at the outlet M1 can be calculated by solving
iteratively:
m√
RTt0γ
A1pt0= M1
(1 +
γ − 1
2M2
1
)− γ+12(γ−1)
Page 36
20 Chapter 2. Centrifugal Compressor Modelling
We’ve done this for the compressor intake but the same procedure is adopted
for any duct.
If the considered component for which we want to solve the flow process is
the impeller (namely inlet section 1 and outlet section 2), we have to replace
absolute quantities with relative ones:
m√
RT ′t2γ
A2p′t1= M ′2
(1 +
γ − 1
2M ′22
)− γ+12(γ−1)
(2.10)
But now the relative stagnation temperature is no more constant and the
equation to solve must be slightly modified. From (2.8) the following relation
between inlet and outlet relative enthalpies holds:
h′t2 − h′t1 =1
2(U2
2 − U21 ) (2.11)
from which the relation between inlet and outlet relative stagnation tem-
peratures is obtained:
T ′t2 = T ′t1 +1
2cp(U2
2 − U21 ) (2.12)
Substituting in (2.10), results that for the impeller AME has to be solved
in the following form:
m√
RT ′t1γ
A2p′t1= M2
(1 +
γ − 1
2M2
2
)− γ+12(γ−1)
(1− U2
1 − U22
2cpT ′t1
) γ+12(γ−1)
(2.13)
2.4.5 Slip factor
Suppose that impeller is of the backward swept blades type, i.e. with blades
exit angle opposite to the direction of rotation. This is in general a preferable
configuration with respect to the purely radial blades configuration because
it allows to reduce the Mach number at impeller exit, then making difficult
to reach the choking condition in vaned diffuser throat. If the flow at the
impeller outlet were perfectly guided by the blades, the following relations
would hold:
cθ2 = U2 + cm2 tanβB2
where βB2 is the exit geometric blade angle of impeller.
But because of the finite number of blades, the flow it is said to slip, with
the effect of modifying the exit velocity triangle and leading to a smaller
tangential velocity cθ2 , hence reducing the delivered pressure ratio. Note
Page 37
Chapter 2. Centrifugal Compressor Modelling 21
Figure 2.6: Velocity triangles with and without slip
that this occurs even in ideal conditions, it is not an inefficiency, but it
makes however necessary a larger impeller or higher rotational speeds to
compensate the forfeit in pressure ratio.
A slip factor is hence defined to quantify the amount of slip:
σ = 1−cslipU2
= 1− cθ2∞ − cθ2U2
and it can be estimated with semi-empirical correlations, for instance that
given by Stanitz(1952) σ = 1 − 0.63πZB
, where ZB is the number of blades.
This is known as the American definition of slip factor [1].
From the velocity triangle of figure 2.6, it follows that
cθ2 = σU2 + cm2 tanβB2
2.4.6 Non-guided swirling flow
The flow in vaneless diffuser and volute is modelled in a bit different way [16],
being the flow unconstrained in this compressor’s parts because of absence
of vanes and thereby free to swirl. Consider for example the vaneless diffuser
(sections 2-3). The starting point is the continuity equation m2 = m3, from
which we have
ρ2A2cr2 = ρ3A3cr3
and expanding the terms
ρ22πR2b2c2 cosα2 = ρ32πR3b3c3 cosα3
where b2 and b3 are the widths respectively at inlet and outlet of the vane-
less diffuser. Due to the absence of blades and making the assumption of
frictionless flow, the angular momentum is constant
Page 38
22 Chapter 2. Centrifugal Compressor Modelling
R2cθ2 = R3cθ3
Combining the two previous equations, under the further assumption of
parallel walled vaneless diffuser (b2 = b3) we have
tanα2
ρ2=
tanα3
ρ3(2.14)
The exit absolute flow angle can be found iteratively, initially giving a rea-
sonable value to ρ3 and iterating until converging. Then c3 can be calculated
from the continuity equation and T3 from stagnation temperature conserva-
tion.
2.5 Compressor losses
The work transfer in actual conditions is always less than the ideal work, due
to dissipation phenomena involved in the fluid process. In this section, first
the compressor efficiency will be defined, then the main loss mechanisms
will be introduced showing later how flow equations modifies to take losses
into account.
2.5.1 Compressor efficiency
The compressor efficiency is defined in the following intuitive form:
ηc :=work input in ideal process
actual work input
but to avoid confusion we have to define it more clearly. In particular, this
definition of efficiency requires to specify 3 items:
• the inlet and outlet states, if static or stagnation.
• the reference ideal process.
• whether external (or parasitic) losses are included or not.
Inlet and exit states
Usually to compute efficiency the stagnation state is chosen as inlet state
because also the kinetic energy has a role in the compressor dynamics. The
exit state is by contrast more arguable, but the following criterion is usually
adopted:
Page 39
Chapter 2. Centrifugal Compressor Modelling 23
• if the outlet kinetic energy can be used in some way, stagnation state
is chosen.
• if the exit kinetic energy is almost completely wasted, exit static pres-
sure is adopted.
The latter could be the case of turbocharger’s compressors, where the exit
kinetic energy is very little used, only to partially aid scavenging (i.e. the
stroke period in which discharge gases are ejected from the engine cylinders).
The ideal process
The isentropic (or adiabatic) process is almost always considered as reference
ideal process. As already discussed, the work transfer per unit of mass flow
equals the change in total enthalpy. Considering for example the impeller:
Pcm
= ht2 − ht1
The total-to-total efficiency expression takes then the following form:
ηtt =ht2s − ht1ht2 − ht1
Figure 2.7: Mollier diagram for compression process in the impeller
Page 40
24 Chapter 2. Centrifugal Compressor Modelling
But this expression is unusable because the state 2s does not have a real
physical meaning; then substituting the total enthalpy with the total tem-
perature (i.e. simplifying cp) and using the thermodynamic relationship
Tt2Tt1
= (pt2pt1
)γ−1γ
the total-to-total efficiency results in:
ηtt =(pt2pt1 )
γ−1γ − 1
Tt2Tt1− 1
being pt2 = pt2s.
Likewise, the static-to-static efficiency is:
ηss =(p2
p1)γ−1γ − 1
T2T1− 1
(2.15)
Under the assumption that the inlet and the exit velocities are similar,
follows that ηtt ' ηss. The other isentropic efficiency commonly used is the
total-to-static, defined as
ηts =( p2
pt1)γ−1γ − 1
Tt2Tt1− 1
External losses
External losses, or parasitic losses, are associated with losses originating
from minor flows leaking away from the main flow through the compressor;
they account for mechanisms such as the recirculation at the eye of the
impeller and leakage through the space between the shroud and the casing.
Parasitic losses produce an enthalpy rise without any change in the pressure
ratio, so the choice to include them or not in the compressor efficiency is
arbitrary. Usually in turbocharger applications they are supposed to be part
of the turbine losses.
2.5.2 Physics of loss mechanisms
In this work 11 different types of losses has been considered:
• Skin friction loss: the loss generating from the contact of the fluid
with the blades or duct surface.
Page 41
Chapter 2. Centrifugal Compressor Modelling 25
• Incidence loss: the loss caused by the impact of the fluid at the inlets
of impeller and vaned diffuser, due to a non-perfect direction of the
fluid with respect to the blades inlet angle.
• Shock loss: due to shock waves generated when the fluid reaches
locally supersonic speed.
• Blade loading loss: caused by the blade-to-blade pressure gradient
in the impeller, which generates secondary flows that could bring to
stall.
• Hub to shroud loss: loss generated by the pressure gradient in the
hub-to-shroud direction.
• Clearance loss: caused by the recirculation of a small percentage of
the fluid through the gap between the impeller and the casing from
the high pressure region to the suction region.
• Mixing loss: the flow leaving the impeller is not uniform because
of the boundary layer separation at some point on the blade suction
surface, that leads to a highly distorted velocity profile at the impeller
discharge. In modelling literature this distorted profile is supposed for
simplicity to be formed by two different flows, the jet (high velocity
flow) and the wake (low velocity flow). A scheme is proposed in figure
2.8. Mixing loss accounts for the mixing of these two flows which cause
a reduction of the effective outflow area. We will consider this effect
estimating a blockage factor B ≤ 1 that will be multiplied for the
geometric discharge area to obtain the actual discharge area.
• Choking loss: at high rotational speeds, the Mach number at impeller
or vaneless diffuser throat can reach the unit and the flow will be
choked, i.e. the mass flow rate cannot increase.
• Diffusion loss: this loss occurs in vaneless and vaned diffusers due to
a non perfect velocity diffusion with consequent rising of dissipating
vortex.
• Meridional velocity loss: in the volute the tangential component
of the velocity is supposed to be completely lost.
• Tangential velocity loss: due to a non perfect conservation of the
angular momentum across the volute, even the tangential velocity com-
ponent undergoes to loss.
Page 42
26 Chapter 2. Centrifugal Compressor Modelling
Figure 2.8: Jet and wake velocity profiles at impeller discharge
2.5.3 Loss coefficients
As we have seen, losses in centrifugal compressor are several and acting with
very different mechanisms, making any attempt to describe all of them with
a detailed mathematical analysis incredibly difficult.
The historical and standard approach in centrifugal compressors modelling
and analysis is to calculate the isentropic flow with the equations previously
introduced and later correct the results in order to take into consideration
the effect of the losses.
This can be done by the definition of loss coefficients, one for each type of loss
mechanism, calculable by means of semi-empirical correlations which give
an estimation of the entropy change ∆s in the flow process. These empirical
correlations are the result of the accumulation of many years’ experience by
designers and researchers. It must be clear that a loss coefficient is basically
a device used to simplify the computing of actual conditions, therefore it
has only a limited physical validity; if it had an exact physical validity it
would become integral part of the model.
In order to be able to compare different types of losses, a common defini-
tion of loss coefficient is necessary. We will use the static enthalpy loss
coefficient, defined as
ξ =∆hy12c
2y
(2.16)
where with y we have indicated the exit section of the generic duct for which
the loss coefficient has to be computed. ∆hy = hy − hys is the enthalpy
Page 43
Chapter 2. Centrifugal Compressor Modelling 27
difference between the isentropic-isobaric (ideal) case and the actual case:
loss coefficients aim is then to estimate this enthalpy difference, normalized
with respect to the outlet isentropic kinetic energy. For example, a loss
coefficient to model skin friction loss was suggested by Aungier (1995):
ξsf = 4Cfw2
c22
LBDH
where Cf is the impeller skin friction coefficient, depending on the impeller
construction material, w = w1+w22 , LB the mean camberline length of im-
peller blades, DH the hydraulic diameter of impeller channels. Observe that
loss coefficients depend on:
• Inlet and discharge isentropic conditions of the considered duct (e.g.
w1 and w2).
• Geometry of the considered duct.
this means that they are calculable only after that isentropic conditions have
been found.
It is possible to demonstrate [2] that the isentropic AME in presence of losses
simply modifies in:
• For stators:
m√
RTt0γ
A1pt0= e−
∆sR M1
(1 +
γ − 1
2M2
1
)− γ+12(γ−1)
(2.17)
• For impeller (1-2):
m√
RT ′t1γ
A2p′t1= e−
∆sR M2
(1 +
γ − 1
2M2
2
)− γ+12(γ−1)
(1− U2
1 − U22
2cpT ′t1
) γ+12(γ−1)
(2.18)
where the term e−∆sR includes the effect of entropy variation ∆s due to
losses, for simplicity of notation let us call it µ. This term is computable
once the loss coefficients have been obtained by means of the empirical cor-
relations. For the static enthalpy loss coefficient it is possible to demonstrate
the following relation:
µ =(
1 +γ − 1
2ξovM
22
) γγ−1
(2.19)
where ξov is the overall loss coefficient, obtained summing all coefficients of
each loss mechanism.
Page 44
28 Chapter 2. Centrifugal Compressor Modelling
2.6 Model structure
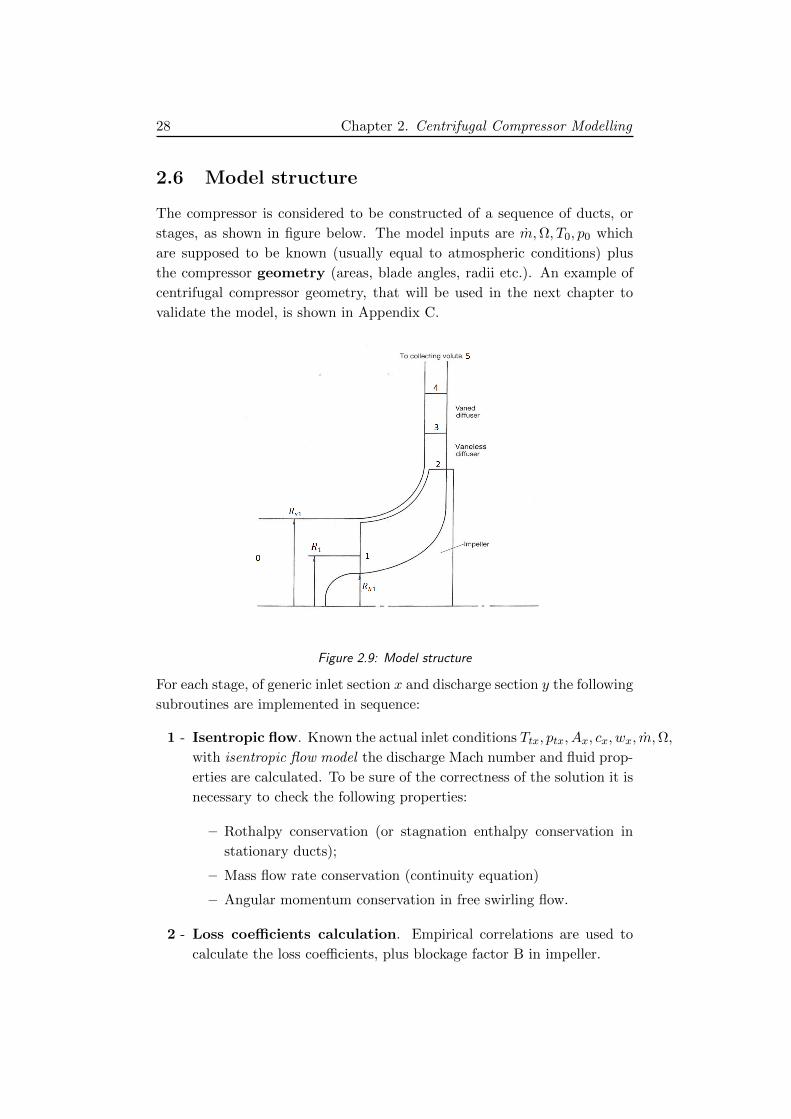
The compressor is considered to be constructed of a sequence of ducts, or
stages, as shown in figure below. The model inputs are m,Ω, T0, p0 which
are supposed to be known (usually equal to atmospheric conditions) plus
the compressor geometry (areas, blade angles, radii etc.). An example of
centrifugal compressor geometry, that will be used in the next chapter to
validate the model, is shown in Appendix C.
Figure 2.9: Model structure
For each stage, of generic inlet section x and discharge section y the following
subroutines are implemented in sequence:
1 - Isentropic flow. Known the actual inlet conditions Ttx, ptx, Ax, cx, wx, m,Ω,
with isentropic flow model the discharge Mach number and fluid prop-
erties are calculated. To be sure of the correctness of the solution it is
necessary to check the following properties:
– Rothalpy conservation (or stagnation enthalpy conservation in
stationary ducts);
– Mass flow rate conservation (continuity equation)
– Angular momentum conservation in free swirling flow.
2 - Loss coefficients calculation. Empirical correlations are used to
calculate the loss coefficients, plus blockage factor B in impeller.
Page 45
Chapter 2. Centrifugal Compressor Modelling 29
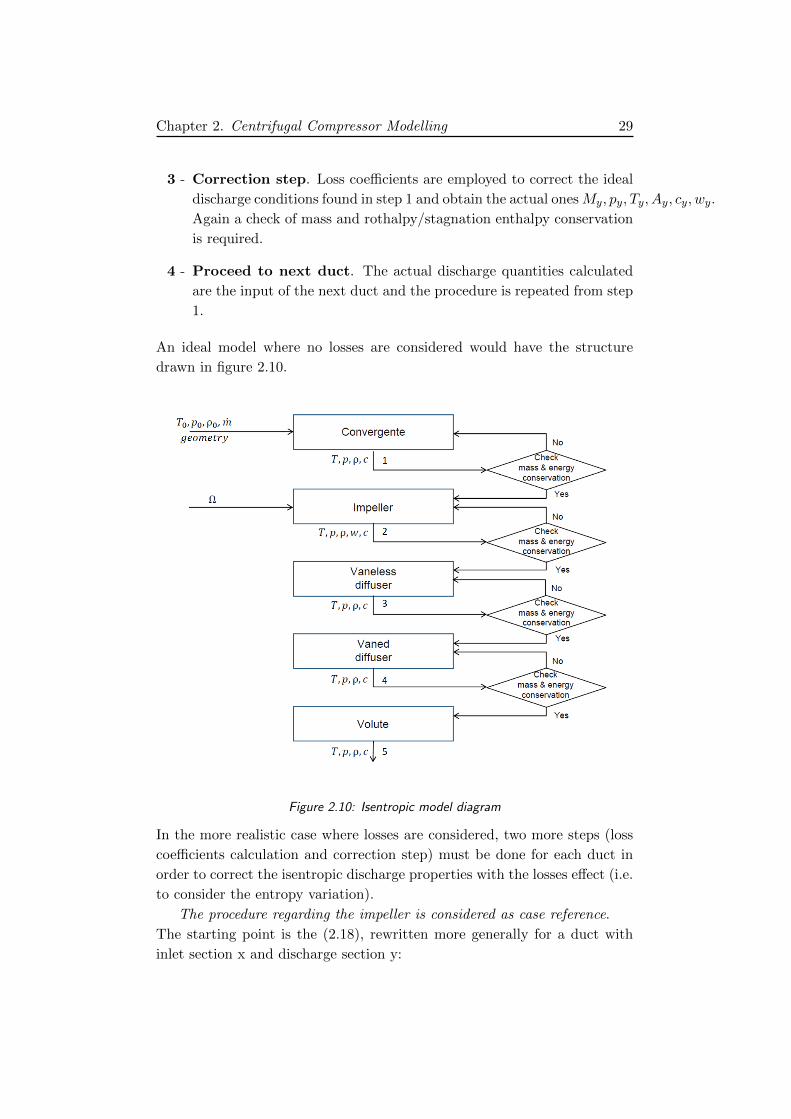
3 - Correction step. Loss coefficients are employed to correct the ideal
discharge conditions found in step 1 and obtain the actual onesMy, py, Ty, Ay, cy, wy.
Again a check of mass and rothalpy/stagnation enthalpy conservation
is required.
4 - Proceed to next duct. The actual discharge quantities calculated
are the input of the next duct and the procedure is repeated from step
1.
An ideal model where no losses are considered would have the structure
drawn in figure 2.10.
Figure 2.10: Isentropic model diagram
In the more realistic case where losses are considered, two more steps (loss
coefficients calculation and correction step) must be done for each duct in
order to correct the isentropic discharge properties with the losses effect (i.e.
to consider the entropy variation).
The procedure regarding the impeller is considered as case reference.
The starting point is the (2.18), rewritten more generally for a duct with
inlet section x and discharge section y:
Page 46
30 Chapter 2. Centrifugal Compressor Modelling
m√
RT ′txγ
Ayp′tx= µMy
(1 +
γ − 1
2M2y
)− γ+12(γ−1)
(1−
U2x − U2
y
2cpT ′tx
) γ+12(γ−1)
(2.20)
This is the fundamental equation for losses analysis, it has a general validity
because it does not hold only for the impeller but even for stationary ducts,
in fact for the latter it is enough to consider static stagnation state instead
of the relative one, absolute Mach number instead of the relative and setting
Ux and Uy equal to 0 to obtain the (2.17).
In turbomachinery is preferable to consider inlet and discharge sections nor-
mal to the flow direction, then Ay is replaced with Ay cosβy, and in order
to leave on the left hand side only known terms we divide both members for
Ax, to obtain the final form of the AME with losses :
m√
RT ′txγ
Axp′tx= µ
Ay cosβyAx
M ′y
(1 +
γ − 1
2M ′2y
)− γ+12(γ−1)
(1−
U2x − U2
y
2cpT ′tx
) γ+12(γ−1)
(2.21)
2.6.1 Isentropic flow
For the generic duct, the first step is to compute the isentropic discharge
conditions. In equation (2.21) set µ = 1, that is set the entropy variation
equal to zero. Ay = AGy, i.e. discharge area equal to geometric outlet
area because blockage does not occur in isentropic conditions (B = 1). The
discharge flow angle βy is not equal to the blades geometric angle βBy and
its computation is based on the slip factor definition. First, let us initialize
βy = βBy and solve equation (2.21) to obtain M ′y. Now recall that:
cθy = σUy + cmy tanβBy
but cθy is also given by
cθy = Uy + wy sin y
Combining the above equations and rielaborating, the following equation is
obtained:
cosβy tanβBy − sinβy −Uy(1− σ)
wy= 0
which can be solved in βy to give:
Page 47
Chapter 2. Centrifugal Compressor Modelling 31
sinβy =
−Uy(1−σ)wy
+ tanβBy
√1 + tan2βBy −
U2y (1−σ)2
w2y
1 + tan2βBy
wy is eliminated inverting the (2.5) and using (2.2)
wy = M ′y
√γRT ′ty
1 + γ−12 M ′2y
where T ′ty is obtained from the rothalpy conservation:
T ′ty = T ′tx +1
2cp(U2
y − U2x)
The procedure is repeated recursively until the converging of M ′y and βy.
The computation of remaining isentropic discharge quantities is straightfor-
ward.
Ty =T ′ty
1 + γ−12 M ′2y
wy =M ′y√γRTy
cmy = wy cosβy
cθy = Uy + cmy tanβy
cy =√c2my + c2
θy
αy = atancθycmy
My =cy√γRTy
p′ty = p′tx(T ′tyT ′tx
)
γγ−1
µ
p′y =p′ty
1 + γ−12 M ′2y
η =(pypx
)γ−1γ − 1
TyTx− 1
Finally, it is suggested to verify at the end of each subroutine the following
fundamental properties, that the computed quantities must satisfy:
Page 48
32 Chapter 2. Centrifugal Compressor Modelling
• Rothalpy conservation in impeller
cpTx +w2x
2− U2
x
2= cpTy +
w2y
2−U2y
2
or stagnation enthalpy conservation in stators
cpTx +c2x
2= cpTy +
c2y
2
• Mass flow conservation (continuity equation)
ρxcxAnx = ρycyAny
where with An we indicate the area normal to the flow direction.
• Perfect gas law relation between py, Ty, ρy
2.6.2 Loss coefficients calculations
The second step is the evaluation of the effect of losses, for which it is nec-
essary to compute a set of loss coefficients ξi, every one of which depends
on the respective loss mechanism, geometry of the compressor and the isen-
tropic inlet and discharge properties of the considered duct. An overall loss
coefficient is finally given by the sum of all loss coefficients:
ξov = ξsf + ξinc + ξsl + ξbl + ξhs + ...
from which the value of parameter µ is computed using the (2.19).
Moreover, blockage factor B is estimated with a correlation, for example that
suggested by Aungier [3]. This permits to estimate the actual discharge flow
area as Ay = BAGy.
2.6.3 Correction step for actual flow
The proceeding to obtain the actual discharge conditions is the same of
the isentropic flow, but now using the value of µ computed in the previous
section and also considering the reduction of the impeller discharge area due
to mixing of flows by means of the blockage factor B. AME is solved again
iteratively to find the actual discharge properties of the considered duct.
These will be the input properties of the next duct in the flow path. The
correction step for a single duct is outlined in the diagram of figure 2.11.
Page 49
Chapter 2. Centrifugal Compressor Modelling 33
Figure 2.11: Scheme for actual flow computation
Page 51
Chapter 3
Model Validation and Losses
Analysis
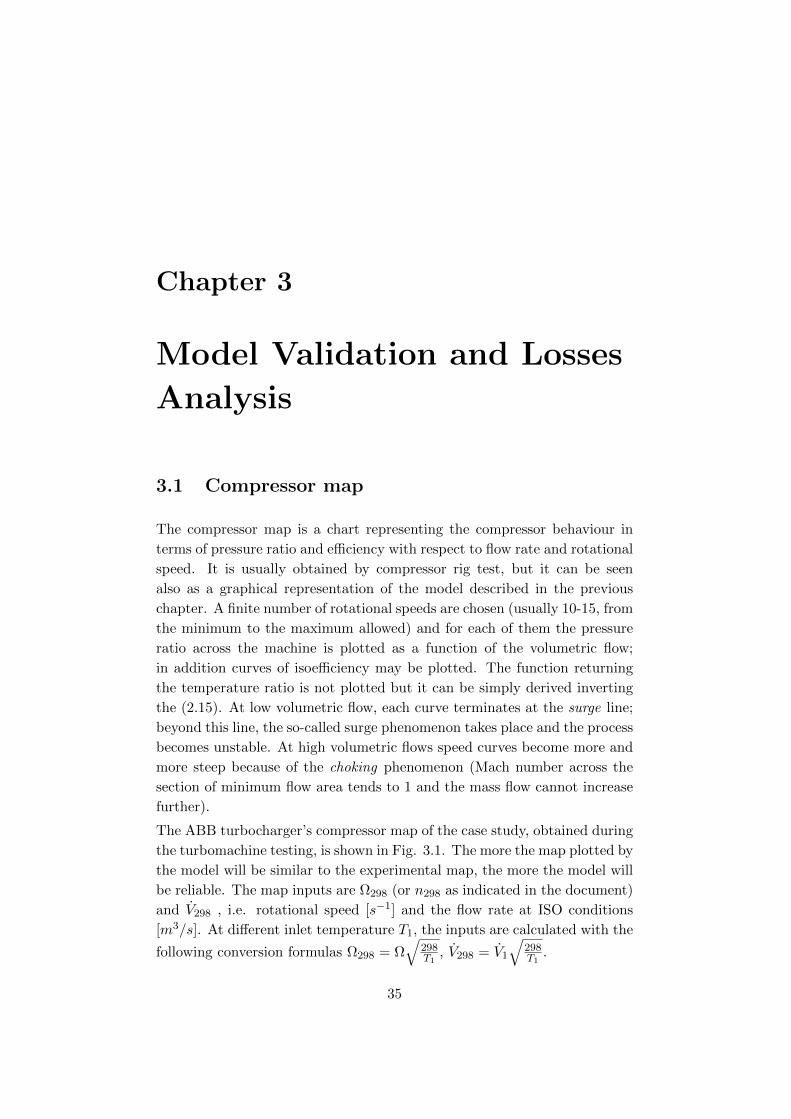
3.1 Compressor map
The compressor map is a chart representing the compressor behaviour in
terms of pressure ratio and efficiency with respect to flow rate and rotational
speed. It is usually obtained by compressor rig test, but it can be seen
also as a graphical representation of the model described in the previous
chapter. A finite number of rotational speeds are chosen (usually 10-15, from
the minimum to the maximum allowed) and for each of them the pressure
ratio across the machine is plotted as a function of the volumetric flow;
in addition curves of isoefficiency may be plotted. The function returning
the temperature ratio is not plotted but it can be simply derived inverting
the (2.15). At low volumetric flow, each curve terminates at the surge line;
beyond this line, the so-called surge phenomenon takes place and the process
becomes unstable. At high volumetric flows speed curves become more and
more steep because of the choking phenomenon (Mach number across the
section of minimum flow area tends to 1 and the mass flow cannot increase
further).
The ABB turbocharger’s compressor map of the case study, obtained during
the turbomachine testing, is shown in Fig. 3.1. The more the map plotted by
the model will be similar to the experimental map, the more the model will
be reliable. The map inputs are Ω298 (or n298 as indicated in the document)
and V298 , i.e. rotational speed [s−1] and the flow rate at ISO conditions
[m3/s]. At different inlet temperature T1, the inputs are calculated with the
following conversion formulas Ω298 = Ω√
298T1
, V298 = V1
√298T1
.
35
Page 52
36 Chapter 3. Model Validation and Losses Analysis
Figure 3.1: ABB Compressor characteristic map
Page 53
Chapter 3. Model Validation and Losses Analysis 37
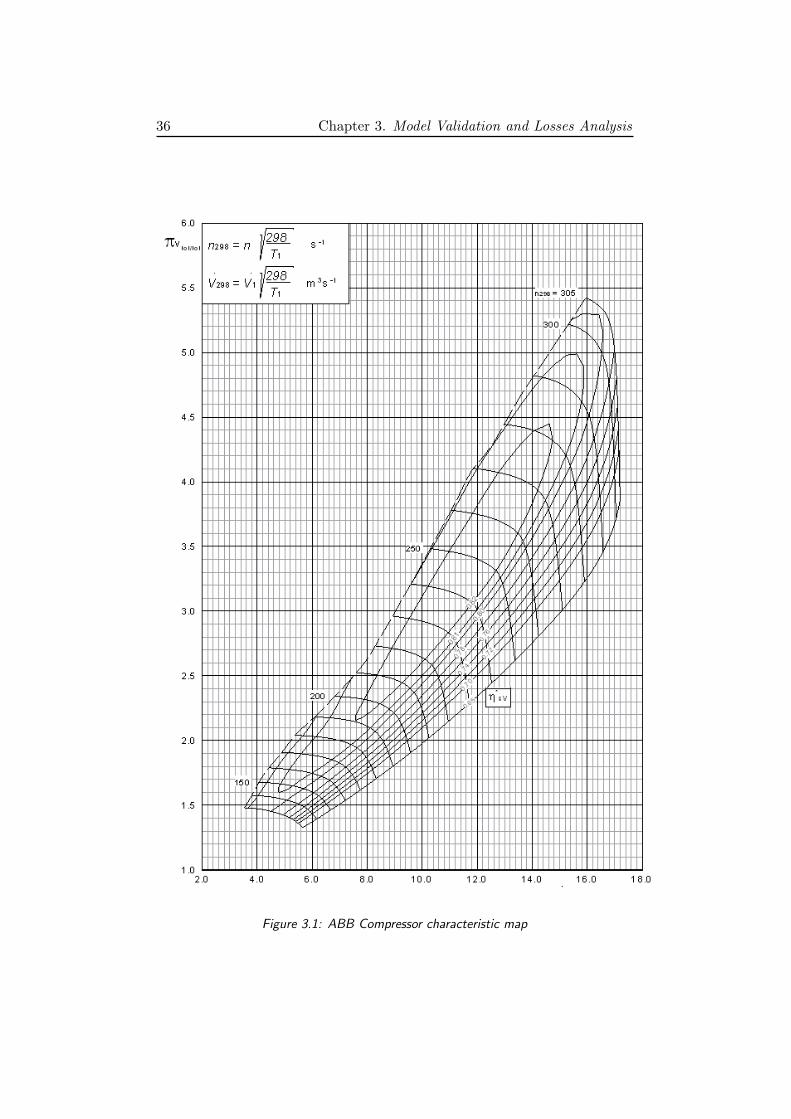
3.2 Validation of the model
The model has been developed in Matlab, coding functions which respec-
tively calculate the isentropic flow, compute the loss coefficients and correct
the isentropic discharge conditions to obtain the actual ones, for each duct.
The geometrical data of TPL-77’s centrifugal compressor are not currently
available, then the choice was made to validate the model on a different
set of data found on web, accessible in Appendix C. Validation of centrifu-
gal compressor models is usually carried out comparing the pressure ratios
obtained by the model with those recorded during experimental operation.
This is done for different rotational speeds, usually the minimum, the max-
imum and a medium velocity, in order to verify the accuracy of the model
across its entire operating range. Let us suppose initially that no loss occurs
across the compressor. We need then to solve the isentropic model shown
in figure 2.10: each stage has to be solved isentropically avoiding the loss
coefficients calculation and so the output correction. The comparison of the
isentropic model output with the experimental data is shown in Fig. 3.2.
Figure 3.2: Isentropic model and experimental data comparison
As expected, the isentropic model overestimates the pressure ratio because
no loss is considered. Furthermore, the deviation from the actual condition
increases as rotational speed and mass flow rate increase, being most of the
Page 54
38 Chapter 3. Model Validation and Losses Analysis
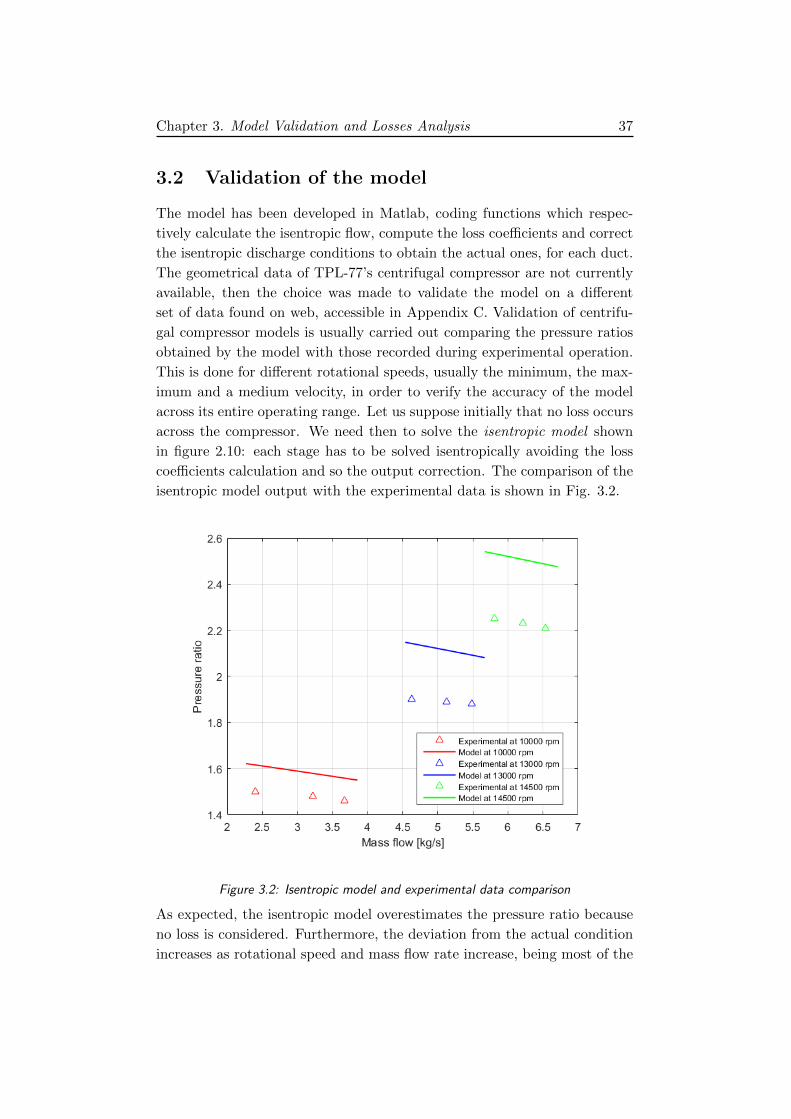
losses directly or even quadratically proportional to these variables. If losses
are accounted in the model, the following result is achieved:
Figure 3.3: Model with losses and experimental data comparison
The model fits well the reality for low and medium velocities, while for high
rotational speeds it tends to overestimate the losses amount returning a low
pressure ratio. However, the ABB turbocharger under analysis does not
work at its maximum allowed speed, reason why the model is expected to
fit the reality good even for the present case study. This statement is also
supported by the affinity laws [18] for pumps and fans: these laws permit to
state that a model working good for a certain centrifugal compressor works
even good for a larger compressor; the only requirement for the application
of these laws is that the two compressors have a similar dynamical behaviour,
that is a reasonable hypothesis.
Notice also the sudden change of slope as the mass flow rate increases: it is
due to the blockage factor becoming less than 1; the physical interpretation
of this fact is that for high velocities the mixing of the jet and the wake (the
two components of which the flow is thought to be constituted) becomes
more critical causing in fact a reduction of the equivalent discharge flow
area A2 of the impeller, and as a consequence a decreasing of the delivered
pressure ratio.
Page 55
Chapter 3. Model Validation and Losses Analysis 39
3.3 Geometrical parameters identification
Once the model is validated it can be applied to the case study turbocharger’s
compressor to analyse its performance in each stage or to simply get the de-
livered pressure and temperature ratios. As already said the compressor
geometry is currently unknown and the number of geometrical parameters
involved in the model (including also those participating in the losses em-
pirical correlations) is very high, making any attempt to identify all of them
from the provided experimental compressor map pointless. The most fun-
damental parameter, that one who determines the size and hence the power
of the centrifugal compressor is the impeller exit radius R2. Then the choice
was made to identify only the impeller exit radius and assigning reasonable
values to the other parameters, according to standard values furnished by
literature. The identification is operated on the map of figure 3.1. Two
points are chosen from the compressor map, on the same velocity curve
Ω = 290 [s−1] and with same efficiency η = 0.81. Suppose that compressor
inlet conditions are the atmospheric ones p0 = pat, T0 = Tat, ρ0 = ρat, it is
then possible to extract the pressure ratio rp and the volumetric flow V .
Point A Point B
V 14.4 15.8 [m3/s]
rp 4.6 4.8
From the definition of efficiency (2.15), the outlet temperature (section 5,
volute outlet) is computed for both points:
T5 = T0
(1 +
rγ−1γ
p − 1
η
)Then p5 is computed from the pressure ratio and the density from the perfect
gas law:
p5 = rpp0 ρ5 =ρ5
RT5
Using the Euler’s turbomachine equation (appendix A), and considering that
the compressor power can also be expressed as the enthalpy change across
the machine, we have:
mcp(T5 − T0) = m(U22 − U2w2 sinβ2)
The relative velocity at impeller exit can be expressed as
Page 56
40 Chapter 3. Model Validation and Losses Analysis
w2 =m
ρ2A2 cosβ2
Supposing β2 = 45 and ρ2 = 2.5[kg/m3] for both points A and B, we obtain
the following system of two equations in 2 unknownsmAcp(T5A − T0) = mA((R2Ω)2 −R2Ω mA
ρ2A2tanβ2)
mBcp(T5B − T0) = mB((R2Ω)2 −R2Ω mBρ2A2
tanβ2)
which solution is
R2 = 0.271[m] A2 = 0.087[m2]
The remaining parameters are chosen opportunely scaling those used in the
validation and assuming typical blade angles suggested by literature.
3.4 Isentropic and actual maps
In this section the model is used to plot the compressor map and a compar-
ison is carried out with the experimental map.
Taking as input the same velocity curves and the same flow rate intervals of
ABB compressor map, the following isentropic map is obtained:
Figure 3.4: Compressor isentropic map
Page 57
Chapter 3. Model Validation and Losses Analysis 41
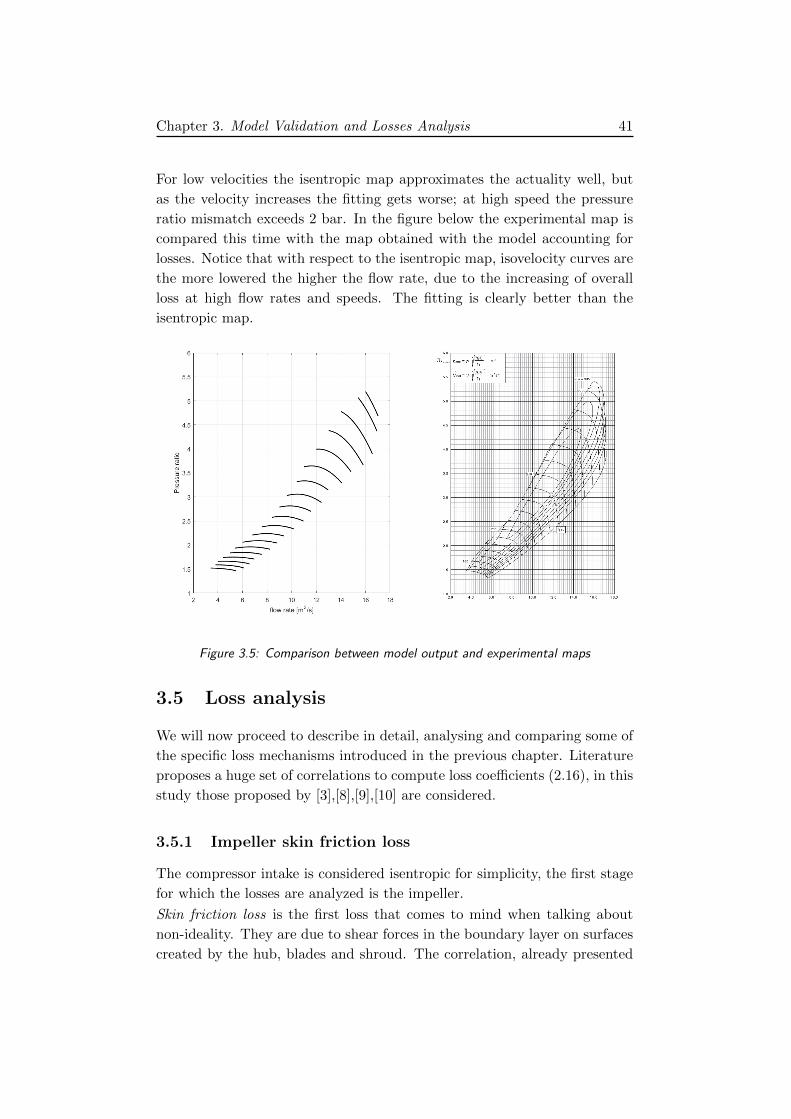
For low velocities the isentropic map approximates the actuality well, but
as the velocity increases the fitting gets worse; at high speed the pressure
ratio mismatch exceeds 2 bar. In the figure below the experimental map is
compared this time with the map obtained with the model accounting for
losses. Notice that with respect to the isentropic map, isovelocity curves are
the more lowered the higher the flow rate, due to the increasing of overall
loss at high flow rates and speeds. The fitting is clearly better than the
isentropic map.
Figure 3.5: Comparison between model output and experimental maps
3.5 Loss analysis
We will now proceed to describe in detail, analysing and comparing some of
the specific loss mechanisms introduced in the previous chapter. Literature
proposes a huge set of correlations to compute loss coefficients (2.16), in this
study those proposed by [3],[8],[9],[10] are considered.
3.5.1 Impeller skin friction loss
The compressor intake is considered isentropic for simplicity, the first stage
for which the losses are analyzed is the impeller.
Skin friction loss is the first loss that comes to mind when talking about
non-ideality. They are due to shear forces in the boundary layer on surfaces
created by the hub, blades and shroud. The correlation, already presented
Page 58
42 Chapter 3. Model Validation and Losses Analysis
in the previous chapter. assumes that the loss is equivalent to that suffered
by a fully developed flow in a pipe of circular cross section:
ξsf = 4Cfw2
c22
LBDH
where
• Cf impeller skin friction coefficient
• LB mean camberline length of impeller blades
• DH impeller channels hydraulic diameter
• w = w1+w22 average relative velocity
• c2 absolute flow velocity at impeller outlet
The skin friction coefficient Cf depends on the construction material of the
impeller and on the flow conditions of the boundary layer, if turbulent or
laminar. Usually it is estimated with approximated formulas depending on
the Reynolds number. In this study we set Cf = 10−3.
The hydraulic diameter DH is a parameter commonly used when treating
flows in non-circular channels, and it is defined as DH = 4Aper , where A is the
cross-section area and per the wetted perimeter. In impeller it is estimated
again with empirical correlations, such as that suggested in [8].
As already said at each loss is associated an increase of entropy. The overall
entropy entropy increase ∆s can be calculated recalling that µ = e−∆sR as:
∆s = −R logµ
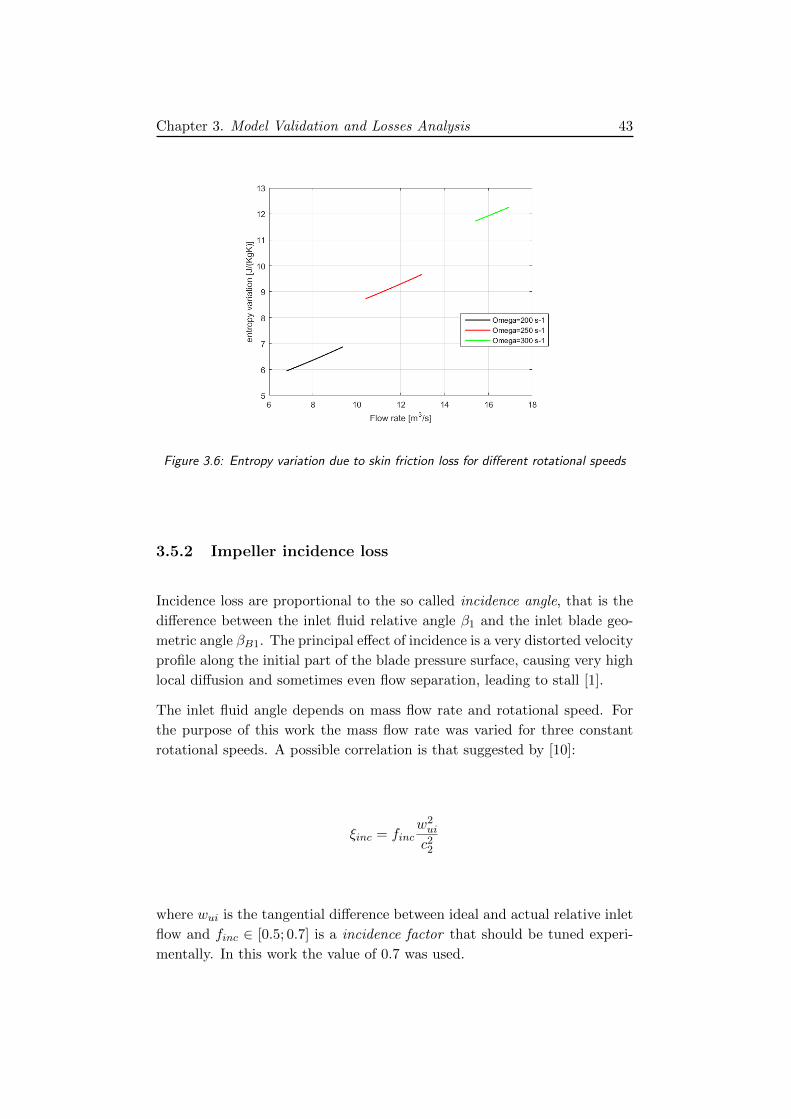
Figure 3.6 shows the increase in entropy due to skin friction at three different
velocities; clearly for constant velocity the irreversibility increases as the
mass flow rate increases. For standard operating conditions skin friction is
usually the dominant loss with respect to the others.
Page 59
Chapter 3. Model Validation and Losses Analysis 43
Figure 3.6: Entropy variation due to skin friction loss for different rotational speeds
3.5.2 Impeller incidence loss
Incidence loss are proportional to the so called incidence angle, that is the
difference between the inlet fluid relative angle β1 and the inlet blade geo-
metric angle βB1. The principal effect of incidence is a very distorted velocity
profile along the initial part of the blade pressure surface, causing very high
local diffusion and sometimes even flow separation, leading to stall [1].
The inlet fluid angle depends on mass flow rate and rotational speed. For
the purpose of this work the mass flow rate was varied for three constant
rotational speeds. A possible correlation is that suggested by [10]:
ξinc = fincw2ui
c22
where wui is the tangential difference between ideal and actual relative inlet
flow and finc ∈ [0.5; 0.7] is a incidence factor that should be tuned experi-
mentally. In this work the value of 0.7 was used.
Page 60
44 Chapter 3. Model Validation and Losses Analysis
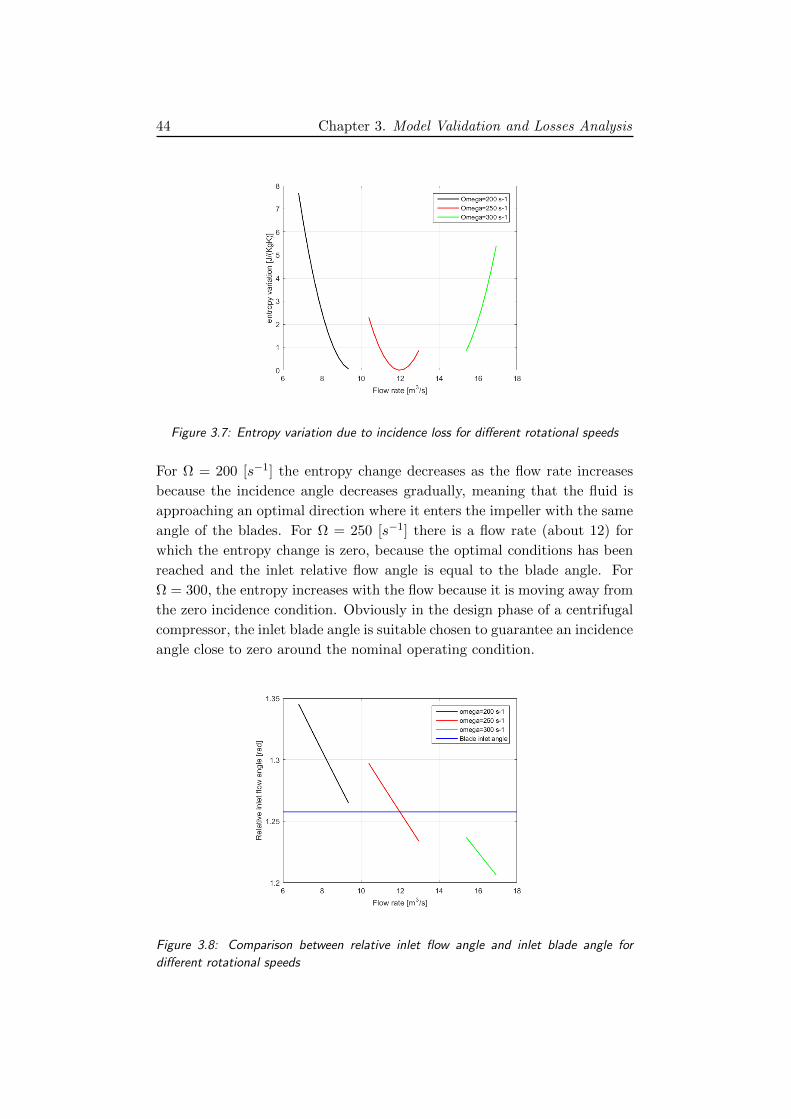
Figure 3.7: Entropy variation due to incidence loss for different rotational speeds
For Ω = 200 [s−1] the entropy change decreases as the flow rate increases
because the incidence angle decreases gradually, meaning that the fluid is
approaching an optimal direction where it enters the impeller with the same
angle of the blades. For Ω = 250 [s−1] there is a flow rate (about 12) for
which the entropy change is zero, because the optimal conditions has been
reached and the inlet relative flow angle is equal to the blade angle. For
Ω = 300, the entropy increases with the flow because it is moving away from
the zero incidence condition. Obviously in the design phase of a centrifugal
compressor, the inlet blade angle is suitable chosen to guarantee an incidence
angle close to zero around the nominal operating condition.
Figure 3.8: Comparison between relative inlet flow angle and inlet blade angle for
different rotational speeds
Page 61
Chapter 3. Model Validation and Losses Analysis 45
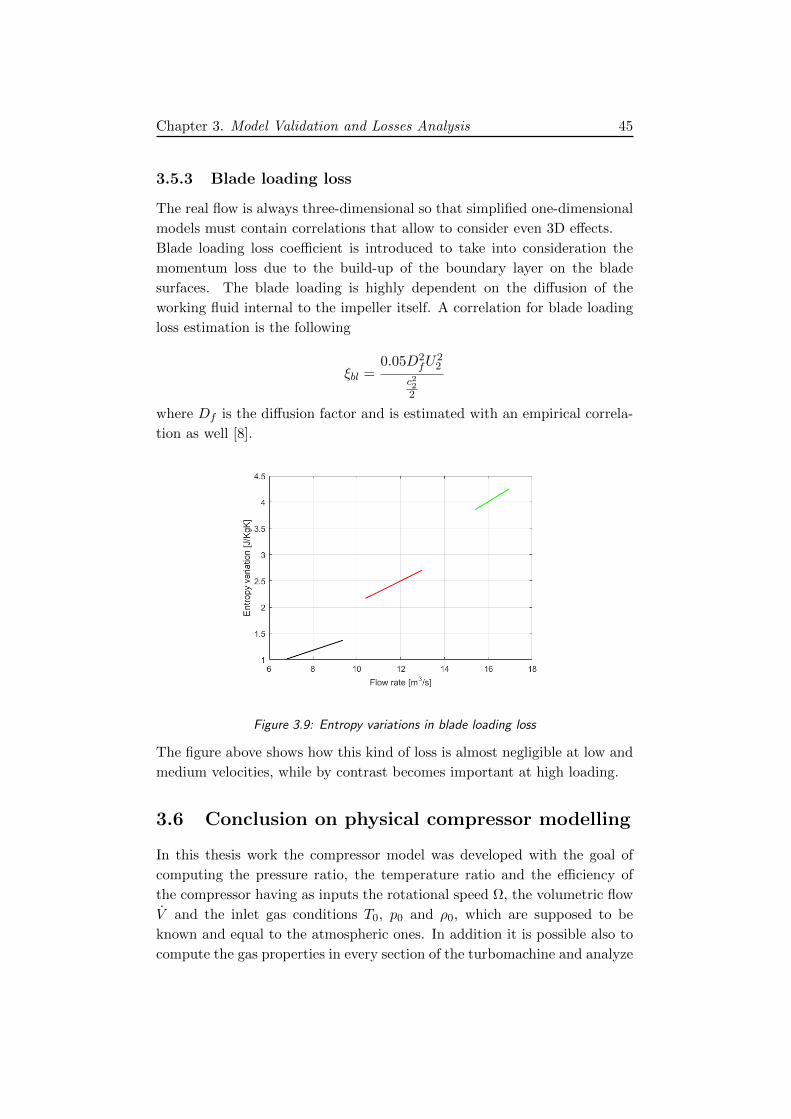
3.5.3 Blade loading loss
The real flow is always three-dimensional so that simplified one-dimensional
models must contain correlations that allow to consider even 3D effects.
Blade loading loss coefficient is introduced to take into consideration the
momentum loss due to the build-up of the boundary layer on the blade
surfaces. The blade loading is highly dependent on the diffusion of the
working fluid internal to the impeller itself. A correlation for blade loading
loss estimation is the following
ξbl =0.05D2
fU22
c222
where Df is the diffusion factor and is estimated with an empirical correla-
tion as well [8].
Figure 3.9: Entropy variations in blade loading loss
The figure above shows how this kind of loss is almost negligible at low and
medium velocities, while by contrast becomes important at high loading.
3.6 Conclusion on physical compressor modelling
In this thesis work the compressor model was developed with the goal of
computing the pressure ratio, the temperature ratio and the efficiency of
the compressor having as inputs the rotational speed Ω, the volumetric flow
V and the inlet gas conditions T0, p0 and ρ0, which are supposed to be
known and equal to the atmospheric ones. In addition it is possible also to
compute the gas properties in every section of the turbomachine and analyze
Page 62
46 Chapter 3. Model Validation and Losses Analysis
the impact of the different losses mechanisms, evaluating the efficiency of
the components individually.
The losses analysis is by the way a secondary objective of the thesis, and fur-
thermore the exact geometrical parameters are not available; for the above
reasons, from now on the model will be used as a white box like that in figure
3.10, disregarding the internal phenomena in each stage.
Figure 3.10: Compressor ”white box” model
The model returns hence as output the overall pressure and temperature
ratios rp and rT , plus the overall efficiency η (static-to-static for simplicity).
3.7 Alternative Compressor Modelling
In cases like this in which the geometrical parameters indispensable for a
correct physical modelling were not available but the experimental com-
pressor map is provided, the compressor model can be developed simply
reproducing the map by means of a suitable interpolating algorithm.
The basic idea of the algorithm is to select from the experimental map a
finite number of points, saving for each point the deductible and interested
quantities and, by interpolation, find the desired output for any input.
In the specific case, for every iso-velocity curve of the ABB map 4 points were
chosen, respectively on the surge margin, on the choke line, at maximum
efficiency and at an intermediate point between the latter two, as shown in
figure 3.11.
Page 63
Chapter 3. Model Validation and Losses Analysis 47
Figure 3.11: Chosen points for interpolation
For each of these points the value of V , rp, η can be read; the temperature
ratio is conversely computable from equation (2.15). For instance, for Ω =
250 [s−1] the points shown in table are saved:
A B C D Units
V 10.15 12 12.8 13.4 [kg/s]
rp 3.45 3.4 3.25 2.62
η 0.81 0.82 0.81 0.65
rT 1.52 1.51 1.48 1.43
Table 3.1: Saved points for Ω = 250[s−1]
The algorithm performs first an interpolation in Ω, computing the 4-points
matrix for values of Ω different from those saved; afterwards it identifies in
which of the three intervals A-B, B-C or C-D the input is and performs a
further interpolation in V to return the desired output (rp, η or rT ).
Page 64
48 Chapter 3. Model Validation and Losses Analysis
3.7.1 Results
The model is applied to plot the three functions η = f1(Ω, V ), rp = f2(Ω, V )
and rT = f3(Ω, V ), for a finite number of Ω, from 230 to 305 [s−1] (Ω < 230
are not likely to verify in such plant).
Figure 3.12: Efficiency, pressure ratio and temperature ratio functions
Page 65
Chapter 4
Theory of Particle Filtering
Optimal Bayesian filtering
Optimal Bayesian filtering is a class of methods that allows to estimate
the state of a non-linear time-varying system, having noisy measurements
of some variables belonging to the state space. The term optimal refers
to statistical optimality, while Bayesian refers to the the approach used to
handle the problem, which is Bayesian inference [11].
4.1 Models and notation
Nonlinear filtering is applied to non-linear discrete-time state space models
in the form: xt+1 = f(xt, vt) vt ∼ pvt x0 ∼ px0
yt = h(xt) + et et ∼ pet
x ∈ Rn y ∈ Rm
Here t denotes the time instant, vt and et are stochastic noises respectively
on the state and on the measurement equation, with probability density
functions (pdf) pvt and pet . vt and et are independent signals, each other and
with respect to the initial conditions, px0 is a pdf that represents the initial (a
priori) knowledge about the state, before any measurement incoming. From
the state space model, it is possible to obtain the more general Markov
model: xt+1 ∼ p(xt+1|xt)yt ∼ p(yt|xt)
49
Page 66
50 Chapter 4. Theory of Particle Filtering
The two pdf in the Markov model are called transition probabilities and they
are implicitly defined by the state-space equations. The Bayesian approach
in non-linear filtering consists in computing or approximating the posterior
distribution of the state given the observations; this can be done recursively
by means of the Bayes update recursion:
p(xt+1|Y t+1) =p(yt+1|xt+1)p(xt+1|Y t)∫
Rnxp(yt+1|xt+1)p(xt+1|Y t)dxt+1
(4.1)
The derivation of the 4.1 is shown in Appendix B. It is useful to introduce the
so called Markov properties, which derive from the independence assumption
made on the stochastic noises:
p(xt+1|xt, xt−1, ..., yt, yt−1, ...) = p(xt+1, xt)
p(yt|xt, xt−1, ..., yt−1, yt−2, ...) = p(yt, xt)
For simplicity in notation, sequence of values of a generic signal s till the
time instant t will be compressed in the notation St, from which follows:
p(xt+1|Xt, Y t) = p(xt+1|xt)
p(yt|Xt, Y t−1) = p(yt|xt)
4.2 Optimal estimation
Theorem 1 (Optimality of conditional expectation). The conditional ex-
pectation E(x|y) is the optimal estimator of state x given the observations
y.
Proof. The conditional expectation
E(x|y) =
∫xp(x|y)dx
is a function of the observation y only, it will be denoted with g(y). We have
to demonstrate that
xopt = g(y) = arg ming(y)
E[(x− g(y)
)2]
E[(x− g(y)
)2] = E[
(x− g(y) + g(y)− g(y)
)2] =
= E[(x− g(y)
)2] + E[
(g(y)− g(y)
)2] + 2E[
(x− g(y)
)(g(y)− g(y)
)]
Page 67
Chapter 4. Theory of Particle Filtering 51
Let us expand the third term
E[(x− g(y)
)(g(y)− g(y)
)] =
∫∫ (x− g(y)
)(g(y)− g(y)
)p(x, y)dxdy
Substituting p(x, y) = p(x|y)p(y)
E[(x− g(y)
)(g(y)− g(y)
)] =
∫(g(y)− g(y))p(y)
(∫(x− g(y))p(x|y)dx
)dy
=
∫(g(y)− g(y))p(y)
(g(y)− g(y)
)= 0
Hence
E[(x− g(y))2] = E[(x− g(y))2] + E[(g(y)− g(y))2]
which is minimum when g(y) = g(y).
4.3 Particle Filter Theory
Many mathematical methods to approximate the computation of the poste-
rior distribution in the 4.1 have been studied and implemented since the mid
of 1960s, such as the well known Extended Kalman Filter, the Gaussian Sum
Filter or Grid Based Methods like the Particle Filter. The basic idea of the
Particle Filter is to approximate the various distributions that appear on the
right hand side of the Bayes update recursion with discrete distributions, in
order to be able to solve integrals in a simple way; with respect to other grid
based methods, the particle filter has the great advantage of constructing
a dynamic stochastic greed, instead of a deterministic one (such as in the
Point Mass Filter), changing in time according to the information provided
by the noisy measurements. The discrete approximation of a generic pdf
is acted by means of a cloud of points, which take the name of particles,
extracted according to the continuous pdf we want to approximate:
p(xt|Y t) ≈ p(xt|Y t) =1
N
N∑i=1
δ(xt − xt,i) (4.2)
xt,i ∼ p(xt|Y t)
where δ(·) is the Dirac Delta Function, N the number of particles, xt,i the
particle i at time instant t.
NB: The sum symbol∑
is indeed an abuse of notation, it is not a sum but
a cloud of points, a set of particles.
Page 68
52 Chapter 4. Theory of Particle Filtering
4.3.1 A priori distribution approximation
The first step is to approximate the a priori distribution p(xt+1|Y t) that
appears in the numerator on the right hand side of the 4.1. It is called a
priori because it describes, at a generic time instant, the knowledge about
the state distribution before the arrival of the new measurement yt+1.
At t = 0 is trivial: a set of particles is sampled from px0 which must be
known
px0 ≈ px0 =1
N
N∑i=1
δ(x0 − x0,i)
For example, suppose that the prior distribution approximation of a 2-
dimensional state has to be defined. The prior knowledge on the system
permits us to say that the two states have both a Gaussian distribution:
x1 ∼ N (10, 1) x2 ∼ N (10, 3)
Sampling N = 2000 particles, the resulting a priori cloud is the following:
Figure 4.1: Cloud of particles representing the a priori distribution px0
At a generic time instant t 6= 0, suppose that p(xt|Y t) is available from the
filtering done at the previous time instant, i.e we have a set of particles1N
∑δ(xt − xt,i). We can then approximate (see Appendix B):
p(xt+1|Y t) ≈∫p(xt+1|xt)p(xt|Y t)dxt =
=1
N
N∑i=1
∫p(xt+1|xt)δ(xt − xt,i)dxt =
1
N
N∑i=1
p(xt+1|xt,i)
Page 69
Chapter 4. Theory of Particle Filtering 53
This is however not yet a discrete approximation, it is indeed a mean of
continuous distributions. So we further approximate:
p(xt+1|Y t) ≈ 1
N
N∑i=1
p(xt+1|xt,i) ≈1
N
N∑i=1
δ(xt+1 − ¯xt+1,i) (4.3)
where ¯xt+1,i ∼1
N
N∑i=1
p(xt+1|xt,i)
Typically ¯xt+1,i ∼ p(xt+1|xt,i) ∀i, i.e. the transition probability is the same
for every particle. Then remembering the duality between state-space model
and Markov model:
¯xt+1,i = f(xt,i, vt,i) vt,i ∼ pvtThis is also called the time propagation step: each particle is propa-
gated to the next time step using the dynamic model in order to obtain the
approximated a priori distribution at time instant t+ 1.
4.3.2 A posteriori distribution approximation
Once the a priori distribution have been approximated with the 4.3, we can
find the a posteriori distribution p(xt+1|Y t+1) directly applying the Bayes
recursive formula 4.1:
p(xt+1|Y t+1) =p(yt+1|xt+1)p(xt+1|Y t)∫
p(yt+1|xt+1)p(xt+1|Y t)dxt+1≈
≈p(yt+1|xt+1) 1
N δ(xt+1 − ¯xt+1,i)∫p(yt+1|xt+1) 1
N δ(xt+1 − ¯xt+1,i)dxt+1=
=
∑Ni=1 p(yt+1|¯xt+1,i)δ(xt+1 − ¯xt+1,i)∑N
i=1 p(yt+1|¯xt+1,i)=
=N∑i=1
qiδ(xt+1 − ¯xt+1,i)
where
qi =p(yt+1|¯xt+1,i)∑Ni=1 p(yt+1|¯xt+1,i)
i = 1, .., N
are called normalized likelihoods and are such that∑qi = 1. In practice
they are weights assigned to each particle, representing the probability that
the corresponding particle is the state at time instant t + 1 knowing that
the last measurement has the value yt+1.
Page 70
54 Chapter 4. Theory of Particle Filtering
The numerator p(yt+1|¯xt+1,i) is the relative likelihood of the particle i. Sup-
posing that measures have Gaussian distribution, relative likelihoods are
computed through the expression of the multivariate conditional Gaussian
distribution:
qi =1√
(2π)m|R|exp(−[yt+1 − h(xt+1)]′R−1[yt+1 − h(xt+1)]
2
)i = 1..N
(4.4)
where R is the covariance matrix of the measurement error, which is diagonal
thanks to the noises independence assumption.
The posterior distribution p(xt+1|Y t+1) is so far approximated by a set of
weighted particles. To complete the recursion the algorithm requires to put
the a posteriori distribution in the same form of the 4.2, then a further
approximation is made:
p(xt+1|Y t+1) ≈N∑i=1
qiδ(xt+1 − ¯xt+1,i) ≈1
N
N∑i=1
δ(xt+1 − xt+1,i)
with xt+1,i ∼M∑i=1
qiδ(xt+1 − ¯xt+1,i)
which means that particles need to be resampled according to the computed
weights qi.
This is the resampling step and it is fundamental in particle filtering since
it gives the indispensable feedback carried by the measurements. A possible
resampling algorithm is the following, which is called sampling importance
resampling (SIR) and is formally justified in [15]:
• Randomly generate a real number r ∈ [0, 1].
• Sum the likelihoods progressively until the accumulated sum is greater
than r; then set xt+1,i = xt,j .
It is possible to show that the obtained distribution tends, for M → ∞, to
p(xt+1|Yt+1).
4.3.3 Conditional expectation
Having the approximation of the posterior distribution p(xt+1|Y t+1) (in form
of a cloud of particles distributed accordingly), the conditional expectation
can be computed as follows:
Page 71
Chapter 4. Theory of Particle Filtering 55
E[xt+1|Y t+1] =
∫xt+1p(xt+1|Y t+1)dxt+1 =
=
∫xt+1
1
N
N∑i=1
δ(xt+1 − xt+1,i)dxt+1 =
=1
N
N∑i=1
∫xt+1δ(xt+1 − xt+1,i)dxt+1 =
1
N
N∑i=1
xt+1,i
4.4 Particle Filter Algorithm summary
• System model, noises pdf and the initial a priori state pdf px0 are
given.
• For t = 0, sample N particles x0,i according to px0 ; N is a tuning
parameter, a trade-off between solution accuracy and computational
effort should be found.
• For t = 1, 2, ..
– Perform the time propagation step to obtain a priori particles ¯xt,iusing the dynamic model;
– Once the measurement yt+1 is available, compute the relative
likelihoods qi = p(yt+1|¯xt+1,i) ∀i, using the 4.4;
– Normalize the relative likelihoods qi = qi∑Nj=1 qj
;
– Resampling, i.e. compute a new set of particles xt+1,i randomly
generated on the basis of the likelihoods qi (a posteriori particles);
– Now we have a posteriori distribution, a posteriori set of particles
distributed according to p(xt+1|Y t+1); on this discrete distribu-
tion we can compute any desired statistical measure, of which the
most important is the conditional expectation:
E[xt+1|Y t+1] =1
N
N∑i=1
xt+1,i (4.5)
which is the optimal estimator.
Page 73
Chapter 5
Particle Filter Application
In the next sections, the Particle Filter will be employed to optimally es-
timate termodynamic variables of turbocharger that are not measured by
the engine control system. Although the computation effort of this method
is often significant, this is not an issue for the present problem because the
time between two consecutive measurements is large and does not constitute
a bottle neck.
Note on notation
There is in this chapter an abuse of notation with respect to chapters on
centrifugal compressor modelling. So far we have indicated with integers
from 1 to 5 the internal sections of the compressor. The present chapter is by
contrast focused on the general turbocharger system, then we change point
of view and the integers from 1 to 6 will indicate the following turbocharger
sections:
• 0 Silencer/Filter inlet
• 1 Compressor inlet
• 2 Compressor discharge
• 3 Intercooler discharge/Engine inlet manifold
• 4 Engine exhaust manifold
• 5 Turbine inlet
• 6 Turbine discharge
57
Page 74
58 Chapter 5. Particle Filter Application
Figure 5.1: Scheme of turbocharger sections
5.1 Data analysis
Multiple data sets from Marseglia plant were available, each one containing
the time evolution in a specific month of the variables shown in table:
Description Units
ΩA,B Rotational speed for turbochargers A, B [rpm]
T1 Compressor inlet temperature [K]
T3 Engine inlet manifold temperature [K]
p3 Engine inlet manifold pressure [Pa]
T5A,B Turbine inlet temperature for turbo A, B [K]
T6A,B Turbine outlet temperature for turbo A, B [K]
∆Tcoolant Temperature drop of the cooling water in the heat exchanger [K]
Table 5.1: Measured variables
Sometimes the rotational speed will be expressed in [rad/s] or [s−1].
The sample rate for each variable is 38 seconds. Being the turbocharger
dynamics about 0.5 seconds, the system can be considered at steady state.
The data set used for the analysis will be that of February 2015 (figure 5.2).
Page 75
Chapter 5. Particle Filter Application 59
Figure 5.2: Set of measures available
Page 76
60 Chapter 5. Particle Filter Application
5.1.1 Filtering and normalization
The monthly time series show some holes probably due to sensors malfunc-
tioning or off-scale behaviours. For example, in February the measured
rotational speed goes to zero several times as can be observed from figure
5.3, clearly a sensor failure.
Figure 5.3: Unfiltered rotational speed ΩA [rpm]
For this reason a preliminary signal filtering was performed in order to obtain
physically likely time series. In the specific case of the rotational speed, a
maximum and a minimum off-scale values were chosen, according to the
compressor map seen in Chapter 3
Ωmax = 305 Ωmin = 190 [s−1]
then values greater than Ωmax and minor than Ωmin are discarded.
Figure 5.4: Filtered rotational speed ΩA [rpm]
Page 77
Chapter 5. Particle Filter Application 61
In parallel, all the values in other time series corresponding in time at the
discarded values are deleted, having no physical meaning (in MATLAB this
correspond to set the element to NaN ). The procedure is repeated for each
time series and at the end, the initial data set will result composed by several
blocks that can be separately analysed. The filtered time series in block are
next normalized with the following formula:
xnorm =x− xmin
xmax − xmin
5.1.2 Principal Component Analysis
Before proceeding with the non-linear filtering, first of all a covariance anal-
ysis was performed on filtered and normalized variables in order to establish
if some of them could be brush aside. In this case, the Principal Component
Analysis (PCA) has been chosen.
PCA is a statistical technique that allows to extract from a set of vari-
ables a subset containing the most of the variability, permitting then to
eliminate redundancy in data discarding highly correlated variables. The
variables contained in this subset are called principal components and ex-
press the most of the variance of the entire set (typically greater than 95%).
Avoiding the mathematical details of the technique, the way to select these
principal components is to project the variables in a different subspace, and
then calculating for each projected component the corresponding eigenvalue
and eigenvector: the eigenvalues represent the information contained in the
corresponding eigenvector or direction of projection. A ”percentage of car-
ried variance” is associated to each component, represented by the percent
normalized eigenvector:
λi% =λi∑λi
100
λi% are collected in decreasing order in a vector, starting from the first they
are extracted until the cumulative sum is minor of a given treshold, typically
98-99% . PCA was performed on every block of the data set; considering
the three largest, the following λi% vectors resulted:
Page 78
62 Chapter 5. Particle Filter Application
Block 1 Block 2 Block 3
78.77 71.38 72.21
17.66 25.21 12.71
1.50 2.03 3.94
0.99 0.58 2.32
0.48 0.3 1.47
0.28 0.23 1.00
0.17 0.13 0.83
0.12 0.08 0.34
0.02 0.02 0.15
0.00 0.03 0.00
0.00 0.00 0.00
Table 5.2: Normalized percent eigenvalues for different data blocks
As can be observed, the first three contain most of the variance, the principal
components are hence 3. It is possible to conclude that in average, from a
set of 10 measurements we can extract 3 of them (clearly the less correlated)
containing the great majority of the system variance.
5.2 Compressor Filtering
5.2.1 Model and prior pdfs
System Model
Being the provided measures sampled with a rate much greater than the
turbo dynamics the system can be considered at steady state and, supposing
an additive measure noise model, the system reduces to:xt+1 = xt + vt vt ∼ pvt x0 ∼ px0
yt = xt + et et ∼ pet
x ∈ Rn y ∈ Rm
where:
x =[V1 Ω T1 p2 T2 p3 η
]′y =
[Ωms T1ms p3ms
]′
Page 79
Chapter 5. Particle Filter Application 63
being Ω, T1 and p3 the three less correlated measures (recalling PCA) chosen
on compressor side for the estimation. Follows that n = 7 and m = 3.
At the dynamic model we have to associate an algebraic model, indis-
pensable to ensure that the particles are related each other by the physics
of the system. This algebraic model is composed by 4 functions:
η = f1(V1,Ω)
rp = f2(V1,Ω)
rT = f3(V1,Ω)
∆pexc = f4(V2, p2, T2)
f1, f2 and f3 are the functions of the compressor model; those of the alterna-
tive model seen at the end of Chapter 3 are used, keeping in mind that if the
geometrical data of the centrifugal compressor were available the physical
model would be more reliable and hence preferable. f4 is instead a function
that returns the pressure drops in the heat exchanger:
∆pexc =Kfm
2
ρ2=Kf V
22 p2
RT2
where Kf is a friction coefficient that must be identified, for example from
nominal conditions. Other trivial algebraic relations such as perfect gas law
or continuity equation are used to link the densities and volumetric flows in
sections 1, 2 and 3, but most of these quantities are not of interest.
Noise covariance matrix
For reasons that will be highlighted later (see roughening), the state noise
can be neglected. The measurement noise is hence the only who needs to be
specified. We assume it is a gaussian white noise with diagonal covariance
matrix thanks to the initial assumption of independence:
R =
Var(Ωms) 0 0
0 Var(T1ms) 0
0 0 Var(p3ms)
The elements of the diagonal are chosen in order to have a suitable con-
vergence of the cloud after the measurements incoming. The following co-
variance matrix was chosen (NB: for normalized variables, see forward the
section ’Normalization’):
Page 80
64 Chapter 5. Particle Filter Application
R =
10−5 0 0
0 10−4 0
0 0 10−4
(5.1)
Prior probability density function px0
First, a prior densities representing our initial knowledge on the system
must be given for the input quantities V , Ω and T1. For simplicity we
suppose that they are distributed according to uniform pdf, inferring the
intervals extremes from compressor map and from average temperature in
the reference month:
V ∼ U(10.5, 16) [m3/s]
Ω ∼ U(250, 305) [s−1]
T1 ∼ U(273, 283) [K]
N = 1000 particles are then extracted accordingly.
Figure 5.5: Prior density of input variables
Some of these particles are however not feasible from a physical point of
view, for example some couples may lie in the surge region or beyond the
choke line, hence they must be checked and deleted from the cloud. As a
consequence, the number of particles N will be minor than that chosen at
Page 81
Chapter 5. Particle Filter Application 65
the beginning, so we have to choose initially a greater N in order to have
after the elimination a suitable size of the cloud.
Figure 5.6: Prior density of input variables after the elimination of unfeasible particles
So far we have a three-dimensional cloud of particles that can be considered
the domain cloud, but each particle has to include 7 variables, being the
state space 7-dimensional. Thereby the algebraic model is used to extend
the prior cloud of particles at the other variables belonging to the state
space. Supposing that the compressor inlet pressure is constant and equal
to the standard atmospheric pressure p1 = 101325 [Pa], we have
For i = 1 : N :
• ηi = f1(Vi,Ωi)
• p2i = f2(Vi,Ωi)p1
• T2i = f3(Vi,Ωi)T1i
• p3i = p2i − f4(Vi, p2i, T2i)
We have so obtained a 7-dimensional prior cloud and each particle can be
seen as a 7x1 vector. Some projections of the 7-dimensional prior cloud
are shown in the figures. Note that the projection on the plane (V , p2) has
clearly the shape of the compressor map; the same happens in the plane
(V , p3) but the cloud is lowered because of the pressure drop in the heat
Page 82
66 Chapter 5. Particle Filter Application
exchanger, which friction coefficient Kf has been identified by nominal con-
ditions, obtainable by engine Data sheet:
Kf = 905 [m−4]
5.2.2 Normalization
The great difference in the orders of magnitude of the state variables lead
to numerical problems in the computation of relative likelihoods qi, i.e. the
4.4 returned 0 for every particle because of a very negative exponent.
For this reason the filtering was performed on normalized variables and
equations. i.e. choosing a suitable reference value for each variable in order
to obtain dimensional consistency (normalized variables around 1). The
covariance matrix 5.1 is already tuned for normalized variables.
The final results were obtained denormalizing the filtered variables.
Figure 5.8: Scheme of normalization/denormalization procedure
5.2.3 Filtering for t > 0
Being the dynamic system actually stationary the time propagation step is
skipped, the prior density at the next time instant is hence equal to the
posterior density computed at the previous time instant.
As the Particle Filter algorithm proceeds, the number of resampled pos-
teriori particles tends to decrease, as a consequence of the discarding of
”unlikely” a priori particles acted in the resampling step, and eventually all
of the particles will collapse to the same value: this is the so-called sample
impoverishment, a typical phenomenon of particle filtering (actually the
discarderd particles does not disappear but they are made coincident with
other likely particles). Many methods exist to avoid this undesired effect,
of which the most diffused and adopted is roughening. In this technique,
a suitable random noise is added to each particle after the resampling step
Page 83
Chapter 5. Particle Filter Application 67
Figure 5.7: Projections of 7-dimensional cloud on some relevant planes
Page 84
68 Chapter 5. Particle Filter Application
(this is the equivalent of adding artificial noise to the process in Kalman
filter); this permits to mantain the initial number of particles constant in
time. A method to tune this noise is that presented in [13]:
xt+1,i(k)← xt+1,i(k) + ∆x(k) k = 1, ..., n
∆x(k) ∼ (0,KM(k)N−1n )
where K is a tuning parameter and M is a vector where the kth element is
computed as
M(k) = maxi,j|xt+1,i(k)− xt+1,j(k)| k = 1, ..., n
In the specific case, we set K = 10−4.
In figures 5.9 and 5.10 the effects of sample impoverishment and roughening
are shown.
Figure 5.9: Sample impoverishmentin in 4 iterations
Page 85
Chapter 5. Particle Filter Application 69
Figure 5.10: Effect of roughening
We observe that the cloud converges in both cases, but with the roughening
it remains more dense, thereby allowing a more accurate computation of the
expected value with the 4.5. In this figures we see only the projection on
the plane (V , p2) but the reasoning holds in general for the 7-dimensional
cloud.
To be more computationally efficient, roughening may be executed only
whether the number of particles becomes minor of a given treshold, for
instance it can be chosen as Nth = 23N . A way to estimate the effective
number of samples and thus the degree of depletion of the cloud, is shown
in [12]:
Neff =N
1 +N2Var(qi)
The condition to perform roughening can be expressed then as Neff < Nth.
After the roughening, some particles may lie in physically infeasible regions:
again we have to check and highlight them; at next time instant, before the
resampling, the relative likelihood of these unfeasible particles will be set to
zero and they will be automatically discarded by the resampling algorithm.
Page 86
70 Chapter 5. Particle Filter Application
5.2.4 Results and validation
The following simulations were run on the first block of the data set of
February 2015. In figure 5.11 a comparison between the measured variables
and the estimation taken from the cloud is shown. The filtering was applied
to measures related to Turbocharger A, but it can be equally applied to
the second turbocharger, although the two device works almost at equal
rotational speeds and efficiencies.
Figure 5.11: Comparison between measured and filtered variables
Page 87
Chapter 5. Particle Filter Application 71
Figure 5.12: Estimation of non measured variables
Thanks to the roughening the filter is able to follow little variations of the
steady state condition. Efficiency is around 0.78, then the compressor is not
working at the point of maximum efficiency but in a still good performance
region. This is probably due to the high mass flow rate, higher than the
nominal one because of the high density of air in winter season. Furthermore,
It can be observed a decreasing in time of estimated mass flow rate, probably
and mainly due to the negative trend of the inlet temperature T1.
To validate the results, the filter was applied to a different data set taken
during the spring season and it was shown that the results were similar; in
particular, it was expected a minor mass flow rate due to lower air density
Page 88
72 Chapter 5. Particle Filter Application
in spring, and that the working point were in the region at higher efficiency,
supposing that the turbocharger was designed to have the maximum per-
formance when conditions were close to the ISO ones. Results are shown in
figures 5.13 and 5.14.
Figure 5.13: Comparison between measured and filtered variables for validation.
Page 89
Chapter 5. Particle Filter Application 73
Figure 5.14: Estimation of non measured variables for validation.
The initial transient is probably due to the fact that the turbocharger was
recovering from a shut down or from a sensors malfunctioning, that we have
filtered as explained in section 4.3, being us interested only in the behaviour
at steady state; in spite of this the filter, again thanks to the roughening, is
able to tail the transient until a real steady state condition is reached. The
only issue is that during the transient, the estimation of T1 is not congruent
with the measurement and it takes some time to tail the measured series,
probably because during this transient measures are physically unfeasible,
while as already said the particles are strongly physically related each other;
anyway after the transient the filter (about 50 samples) the estimation re-
turns to be satisfying.
As expected, the efficiency is slightly greater because of the minor density
Page 90
74 Chapter 5. Particle Filter Application
and hence the minor mass flow rate, which moves the working point toward
the center of the map, at high efficiency. In figures below is represented the
behaviour after the transient.
Figure 5.15: Comparison between measured and filtered variables for validation (detail).
Page 91
Chapter 5. Particle Filter Application 75
Figure 5.16: Estimation of non measured variables for validation (detail).
5.3 Turbine Filtering overview
System model
For what concerns the axial turbines of the two turbochargers A and B,
neither the geometrical data nor the performance map are available, making
very difficult to build a reliable algebraic model as done for the compressor.
For this reason the filtering problem on turbine side will be only outlined,
facing it in a very simplified manner and shelving the development of a more
accurate model to future works on this topic.
As for the compressor, the system model is considered at steady state being
the measures sampled with a rate higher than the turbocharger dynamics.
The state vector and the measure vector are now respectively:
x =[T5 T6 p5 mT ηT
]′y =
[T5ms T6ms mTms
]′where the turbine mass flow mt is not actually measured but derives from the
filtering on compressor side. The mass flow balance for the engine cylinders
in fact gives:
Page 92
76 Chapter 5. Particle Filter Application
mT = mc + mf (5.2)
where mc and mf are the mass flow coming from the compressor and of
injected fuel respectively; the second should be a known input of the engine
control system. PF application on turbocharger’s turbine requires hence an
estimation of the compressor mass flow mc, reason why it must be applied
subsequently to that of compressor.
In order to implement the Particle Filter an algebraic model is required to
link the particles each other. A model for the flow in turbine is presented
in [6]. The exhaust gas flow in the turbine can be considered as the flow
in a chocked nozzle where the inlet and the outlet pressures are p5 and p6
respectively. Then, using the flow equation for compressible fluids through
a nozzle, the mass flow rate equation results
mT = ξAtp5t
√2
RT5t
√( γ
γ − 1
)g
[(p5t
p6
)− 2γ −
(p5t
p6
)− γ+1γ
](5.3)
where all quantities are those referred to combustion gas. Often this equa-
tion is condensed and simplified in the following way:
mT = ξp5√T5
(5.4)
where ξ is called flow coefficient and can as usual be identified from the
nominal working point.
The turbine efficiency is computed as the ratio between the actual and the
isentropic enthalpy drop:
ηt =h(T5)− h(T6)
h(T5)− h(T6iso)(5.5)
where T6iso = (p6
p5)γ−1γ T5 and h(·) is a function that returns the specific
enthalpy of a gas as a function of the temperature given its chemical com-
position. For instance we can suppose that the combustion gas composition
is the following: 77% nitrogen, 12% oxygen, 7% carbon dioxide, 4% steam.
The filtering procedure can be summarized as follows:
• Definition of initial prior densities of input variables T5, T6, mT (usu-
ally uniform or Gaussian); p6 is supposed to be known and equal to
the atmospheric one (possibly plus a small pressure drop across the
boiler downstream of the turbine).
• Sampling of N particles according to the chosen densities;
Page 93
Chapter 5. Particle Filter Application 77
• Completion of the cloud utilizing the model: inverting the 5.4 we
obtain the prior density for p5, applying directly the 5.5.
• Implementation of Particle Filter with the same precautions adopted
for the compressor.
Page 95
Chapter 6
Conclusions
In this thesis a method to build the physical model for a centrifugal compres-
sor has been developed, showing how it can be used to calculate termody-
namic variables and efficiency in its components. The model was validated
and was shown that it fits the reality well, mostly at low/medium velocities.
The compressor model can be used in the particle filter to find the overall
prior probability distribution density, from which to start the estimation
procedure to obtain the non-measured variables, such as efficiency, basing
on those measured. This is important in monitoring systems because it al-
lows to understand if the considered turbomachine is approaching a state
with low efficiency or even an unstable condition. The choice to use the
particle filter amongst the big class of non-linear filters was suggested by
the nature of the problem and by the difficulty to algebraically invert the
compressor physical model to obtain an estimation for the input, e.g. the
flow rate V . Because of the non availability of the geometric parameters
of the case study compressor, the filter has been tuned using an alterna-
tive model extracted from the experimental map provided by ABB. It must
however be clear that a physical model is absolutely preferable to map-based
model, because the latter was obtained and is valid only in a static condi-
tion, while the first contains empirical correlations which make it dependent
on the boundary conditions; furthermore the compressor experimental map
may be unavailable, so that a physical modelling would be the only choice.
Future perspectives
A possible starting point for the continuation of the work could be a more
accurate validation of the filtering results, obtaining measures of the goal
variables or using a different method for optimal estimation.
79
Page 96
80 Chapter 6. Conclusions
Furthermore, some parameters in the filter, such as intercooler friction coef-
ficient Kf , have been identified from nominal operating conditions: a useful
improvement may be the tuning of an adaptive estimation method to dy-
namically infer the value of these unknown parameters.
Lastly but not least, we have seen that axial turbines are usually modelled
as chocked nozzles, but a more detailed physical model similar to that of
compressor would be useful to have a relationship between pressure ratio,
rotational speed and the mass flow rate; this would help to a more accurate
estimation of its variables.
Page 99
Appendix A
Fluid mechanics and
thermodynamics equations
A.1 Thermodynamic properties of perfect gas
An ideal gas is a pure substance for which the following relation between
the temperature T , the pressure p and the density ρ always holds:
p
ρ= RT
where R is the gas constant.
Air is a mixture of gases but for temperatures till 2100K it can be considered
an ideal gas with R = 287 [J/kgK].
For ideal gases, two specific heat capacities are defined,
cp =
(∂h
∂T
)p
cv =
(∂u
∂T
)v
and they are linked to R by the relation R = cp − cv.The ratio between cp and cv is called γ, and it is an important parameter
in the compressible flow analysis. A gas such air for which cp, cv and hence
γ are constant is called perfect gas.
A.2 Continuity equation
Also known as mass conservation equation. Assume that a flow is flowing in
a duct on inlet section A1 and outlet section A2, then under the assumption
of no fluid accumulation:
83
Page 100
84 Appendix A
m = ρ1c1An1 = ρ2c2An2 = ρcAn
where
• m is the mass flow passing through the duct.
• ρ and c are the mean density and velocity of the fluid.
• An is a the local section normal to the fluid velocity.
A.3 First law of thermodynamics
In general, the first law of thermodynamics states that, if a system moves
from a state 1 to a state 2, a change in its energy occurs:
∆E =
2∫1
(dQ− dW )
where
• E = U+ 12mc
2 +mgz is the total energy of the system, sum of internal,
kinetic and potential energy.
• Q is the heat transfer positive if entering for convention;
• W is the work transfer, positive if made by the system.
If applied to a control volume, in particular to that one of a turbomachine
or a part of it, the equation takes the following form:
Q− W = m[(h2 − h1) +1
2(c2
2 − c21) + g(z2 − z1)]
In turbomachines like centrifugal compressors dealing with gases the po-
tential term can be neglected and they can be supposed to be adiabatic,
because the heat loss is much smaller than the work done by the blades on
the gas, obtaining:
−W = m[(h2 − h1) +1
2(c2
2 − c21)]
For compressors (work absorbing machines) it is better to write
Pc = Wc = −W = m[(h2 − h1) +1
2(c2
2 − c21)]
Page 101
Appendix A 85
If even work transfer is zero, such as in stationary ducts, the equation be-
comes:
h1 +c2
1
2= h2 +
c22
2
also known as stagnation enthalpy conservation.
A.4 Second law of thermodynamics
Second law of thermodynamics introduces the concept of entropy increasing
of a system moving from a state 1 to a state 2 due to irreversibility, very
useful to quantify losses occuring in a thermodynamic system.
m(s2 − s1) =
2∫1
dQ
T+ ∆Sirr
• s is the specific entropy;
•2∫1
dQT entropy production due to heat exchange;
• ∆sirr entropy production due to irreversibility.
Note that if the system is adiabatic and reversible s1 = s2. If the system is
only adiabatic s2 ≥ s1.
For a perfect gas, the following fundamental equation holds:
Tds = cpdT −RTdp
p(A.1)
A.5 Moment of momentum - Euler’s turbomachin-
ery equation
According to Newton’s Second Law the sum of all forces acting on a body
equals the change in momentum:
τ = md
dt(Rcθ)
In turbomachinery, in particular in the rotating element of compressors and
turbine, the law of moment of momentum can be obtained. In compressors,
the flow enters the impeller with tangential velocity cθ1 and leaves with
Page 102
86 Appendix A
velocity cθ2. Integrating between inlet end exit section of the impeller, the
above equation becomes:
τ = m(R2cθ2 −R1cθ1)
For a compressor with angular velocity Ω, the power transmitted to the fluid
is (Euler’s turbomachinery equation):
Pc = τΩ = mΩ(R2cθ2 −R1cθ1) = m(U2cθ2 − U1cθ1)
where U = ΩR is the local blade speed.
In most cases, cθ1 = 0 because the compressor intake directs the fluid to
impeller axially. Moreover, the impeller blades are often backswept, i.e.
their relative angle at impeller exit is opposite to the direction of rotation
(this is an expedient to reduce the usually high Mach number of the flow at
the impeller outlet). In this case the tangential component of the absolute
velocity at the impeller outlet can be expressed as cθ2 = U2 −w2 sinβ2 (see
figure 2.3), then the final expression of the Euler’s equation is:
Pc = m(U2(U2 − w2 sinβ2)) = m(U22 − U2w2 sinβ2)
A.6 Compressible flow relations for perfect gases
Combining the A.1 with the perfect gas law p = ρRT , the following equation
results:
dp
p=cpR
dT
T=dT
T
γ
γ − 1
This equation can be integrated along a streamline between any two arbi-
trary points 1 and 2, obtaining the following fundamental relation between
the stagnation temperature and pressure:
pt2pt1
=(Tt2Tt1
) γγ−1
Page 103
Appendix B
Probability and Statistics
B.1 Probability density function
In probability theory, a probability density function (pdf) of a continuous
random variable p(x) is a function that describes the likelihood of such
variable to take on a given value. It is non-negative everywhere, and it
allows to calculate probability of some statements by means of the following
properties:
P (x ∈ B) =
∫Bp(x)dx
P (a ≤ x ≤ b) =
b∫a
p(x)dx
P (x ≤ a) =
a∫−∞
p(x)dx
P (x = a) =
a∫a
p(x)dx = 0
P (−∞ < x < +∞) =
+∞∫−∞
p(x)dx = 1
The expected value of a random variable x with density function p(x) can
be computed as:
E[x] =
∫p(x)dx
87
Page 104
88 Appendix B
For a set of continuous random variables x1, x2, .., xn it is possible to define
the relation between the joint probability density function p(x1, x2, .., xn)
and the probability that the realization of the set of variables falls inside a
generic domain D, as:
P (x1, x2, .., xn ∈ D) =
∫Dp(x1, x2, .., xn)dx1dx2..dxn
From a joint density it is possible to obtain the marginal distribution of a
variable of interest simply integrating with respect to the other variables:
p(x) =
∫p(x, y)dy
B.2 Conditional density (of x given y)
If x and y are two continuous random variables, it is possible to define the
conditional density function p(x|y) of x given y, which says how x distributes
after y has been observed (a posteriori density). The following relation holds:
p(x|y) =
p(x,y)p(y) p(y) 6= 0
0 p(y) = 0
The conditional expectation of x given y is defined as
E[x|y] =
∫xp(x|y)dx
Other properties of conditional densities are the following:
p(x, y|z) =p(x, y, z)
p(z)=p(x, y, z)
p(y, z)
p(y, z)
p(z)= p(x|y, z)p(y|z) (B.1)
∫p(x, y|z)dy =
∫p(x, y, z)
p(z)dy =
p(x, z)
p(z)= p(x|z)
B.3 Bayes update recursion
The objective of non-linear filtering is to estimate at a generic time instant
t+1 the state xt+1 given the observations Y t+1 = (y1, y2, .., yt+1). According
to the theory of Bayesian inference [11] the goal is to compute p(xt+1|Y t+1).
This conditional density can be recursively computed.
Step 0: Initialization
Page 105
Appendix B 89
Y 0 = ∅ =⇒ p(x0|Y 0) = p(x0)
Step 1: Filtering
We assume p(xt+1|Y t) is known.
p(xt+1|Y t+1) = p(xt+1|yt+1, Yt)
Using the B.1 and dividing/multiplying for p(Y t) we can write
p(xt+1|yt+1, Yt) =
p(xt+1, yt+1, Yt)
p(yt+1, Y t)
p(Y t)
p(Y t)=p(xt+1, yt+1|Y t)
p(yt+1|Y t)=
=p(yt+1|xt+1, Y
t)p(xt+1|Y t)
p(yt+1|Y t)=p(yt+1|xt+1)p(xt+1|Y t)
p(yt+1|Y t)
where for the last transition we have used the Markov properties shown in
section 4.1. The denominator can be expressed as
p(yt+1|Y t) =
∫p(yt+1, xt+1|Y t)dxt+1 =
=
∫p(yt+1|xt+1, Y
t)p(xt+1|Y t)dxt+1 =
∫p(yt+1|xt+1)p(xt+1|Y t)dxt+1
Finally the density p(xt+1|Y t+1) is computed with the following formula:
p(xt+1|Y t+1) =p(yt+1|xt+1)p(xt+1|Y t)∫
p(yt+1|xt+1)p(xt+1|Y t)dxt+1
that is the Bayes update recursion.
The term in the numerator p(xt+1|Y t) which was initially supposed to be
known is actually computed from the filtering result at the previous step
(p(xt|Y t)) with the following equation
p(xt+1|Y t) =
∫p(xt+1, xt|Y t)dxt =
∫p(xt+1|xt, Y t)p(xt|Y t)dxt =
=
∫p(xt+1|xt)p(xt|Y t)dxt
Page 107
Appendix C
Centrifugal compressor data
set for validation
In this appendix are listed the geometrical parameters used for the validation
of the physical model, extracted by the thesis available online ’Centrifugal
compressor modeling development and validation for a turbocharger compo-
nent matching system’ by Christopher Erik Erickson, 2008. Notice that it
refers to a centrifugal compressor smaller than the turbocharger’s one of the
case study, but a good physical model should work well regardless of com-
pressor size thanks to the affinity laws [18]. For the losses analysis of the
compressor of the case study, being the geometrical parameters non avail-
able, as better explained in Chapter 3 a rough identification was performed
to identify the most important one, that is the impeller exit radius R2. The
remaining parameters were chosen according to typical values found in lit-
erature for blade angles and appropriately scaling the others according to
compressor size.
91
Page 108
92 Appendix C
C.1 Impeller geometry
Description Value Units
Inlet hub diameter 0.1106 [m]
Inlet shroud diameter 0.2870 [m]
Inlet blade thickness 0.0037 [m]
Inlet area 0.0489 [m2]
Inlet hub blade angle 51.4 []
Inlet shroud blade angle 37.5 []
Throat area 0.0328 [m2]
Discharge radius 0.2286 [m]
Discharge area 0.0313 [m]
Number of vanes 19
Shroud clearance 0.0004 [m]
Mean blade passage length 0.1826 [m]
Surface roughness 3e-06 [m]
Table C.1: Impeller geometry for validation
C.2 Vaneless diffuser geometry
Description Value Units
Inlet radius 0.2286 [m]
Inlet passage height 0.0238 [m]
Inlet area 0.0342 [m2]
Discharge radius 0.2705 [m]
Discharge passage height 0.0248 [m]
Discharge area 0.0342 [m2]
Table C.2: Vaneless diffuser geometry for validation
Page 109
Appendix C 93
C.3 Vaned diffuser geometry
Description Value Units
Inlet radius 0.2705 [m]
Inlet passage height 0.0248 [m]
Inlet blade thickness 0.0025 [m]
Inlet area 0.0411 [m2]
Inlet blade angle 19.08 []
Throat area 0.0203 [m2]
Discharge radius 0.3166 [m]
Discharge passage height 0.0248 [m]
Discharge area 0.0483 [m2]
Exit blade angle 46.27 []
Number of vanes 15
Blade length 0.099 [m]
Table C.3: Vaned diffuser geometry for validation
C.4 Volute geometry
Description Value Units
Inlet radius 0.3166 [m]
Inlet passage height 0.0248 [m]
Inlet area 0.0493 [m2]
Discharge radius 0.3810 [m]
Discharge area 0.0676 [m2]
Table C.4: Volute geometry for validation
Page 111
Bibliography
[1] S.L. Dixon, C.A. Hall, Fluid Mechanics and Thermodynamics of Tur-
bomachinery, Butterworth-Einemann, 7th edition, 2014.
[2] A. Whitfield, N.C. Baines, Design of radial turbomachines, Longman
Scientific and Technical, 1990.
[3] R. H. Aungier, Centrifugal compressors: a strategy for aerodynamic
design and analysis, ASME Press, 2000.
[4] N.C. Baines, Fundamentals of Turbocharging, Concepts NREC, 2005.
[5] N. Watson, N.S. Janota, Turbocharging the Internal Combustion En-
gine, Wiley, 1982.
[6] H. Nguyen-Schafer, Rotordynamics of Automotive Turbochargers,
Springer, 2015.
[7] X. Gong, R. Chen, Total Pressure Loss Mechanism of Centrifugal Com-
pressors, Canadian Center of Science and Education, Vol.4, no.2, 2014.
[8] P.Y. Li, C.W. Gu, Y. Song, A New Optimization Method for Centrifugal
Compressors Based on 1D Calculation and Analyses, Energies, 8, 2015.
[9] B. W. Botha, A. Moolman, Determining the Impact of the Different
Losses on Centrifugal Compressor Design, The SA Mechanical Engi-
neer, 21(3), 2005.
[10] H. W. Oh, E. S. Yoon, M. K. Chung, An optimum set of loss models
for performance prediction of centrifugal compressors, Proceedings of
Institution of mechanical engineers, Vol. 211, Part A, 1997.
[11] S. Sarkka, Bayesian filtering and smoothing, Cambridge University
Press, 2013.
[12] F. Gustafsson, Particle Filter Theory and Practice with Positioning
Applications, IEEE A&S Systems Magazine, Vol. 25, no.7, July 2010.
95
Page 112
[13] D. Simon, Optimal State Estimation: Kalman, H∞, and Nonlinear
Approaches, Wiley, 2006.
[14] A. Doucet, N. De Freitas, N. Gordon, Sequential Monte Carlo Methods
in Practice, Springer, 2001.
[15] A. F. M. Smith, A. E. Gelfand, Bayesian Statistic without Tears: A
Sampling-Resampling Perspective, The American Statistician, Vol. 46,
no.2, May 1992.
[16] L. A. Catalano, M. Napolitano, Elementi di macchine operatrici a flu-
ido, Pitagora, 2001.
[17] Wikipedia, the free encyclopedia, https://en.wikipedia.org/wiki/Turbocharger.
[18] Wikipedia, the free encyclopedia, https://en.wikipedia.org/wiki/Affinitylaws.