75
Chap. 6 Chap. 6 Linear Linear Transformations Transformations Linear Algebra Ming-Feng Yeh Department of Electrical Engineering Lunghwa University of Science and Technology
| Date post: | 01-Jan-2016 |
| Category: |
Documents |
| Upload: | juniper-horn |
| View: | 230 times |
| Download: | 6 times |

Chap. 6 Chap. 6 Linear TransformationsLinear Transformations
Linear AlgebraMing-Feng Yeh
Department of Electrical Engineering
Lunghwa University of Science and Technology

Ming-Feng Yeh Chapter 6 6-2
6.1 6.1 Introduction toIntroduction to Linear Transformation Linear Transformation Learn about functions that map a vector space V
into a vector space W --- T: V W
v
V: domain of T
w
W: codomain of T
range
T: V Wimage of v

Ming-Feng Yeh Chapter 6 6-3
MapMap If v is in V and w is in W s.t. T(v) = w, then
w is called the image of v under T. The set of all images of vectors in V is called the
range of T. The set of all v in V s.t. T(v) = w is called the
preimage of w.
Section 6-1

Ming-Feng Yeh Chapter 6 6-4
Ex. 1: A function from REx. 1: A function from R22 into R into R22
For any vector v = (v1, v2) in R2, and let T: R2 R2 be defined by T(v1, v2) = (v1 v2, v1 + 2v2)
Find the image of v = (1, 2) T(1, 2) =(1 2, 1+2·2) = (3, 3)
Find the preimage of w = (1, 11)
T(v1, v2) = (v1 v2, v1 + 2v2) = (1, 11) v1 v2 = 1; v1 + 2v2 = 11 v1 = 3; v2 = 4
Section 6-1

Ming-Feng Yeh Chapter 6 6-5
Linear TransformationLinear Transformation Let V and W be vector spaces. The function
T: V W is called a linear transformation of V into W if the following two properties are true for all u and v in V and for any scalar c.1. T(u + v) = T(u) + T(v)2. T(cu) = cT(u)
A linear transformation is said to be operation reserving (the operations of addition and scalar multiplication).
Section 6-1

Ming-Feng Yeh Chapter 6 6-6
Ex. 2: Verifying a linearEx. 2: Verifying a linear transformation from R transformation from R22 into R into R22
Show that the function T(v1, v2) = (v1 v2, v1 + 2v2) is a linear transformation from R2 into R2.
Let v = (v1, v2) and u = (u1, u2) Vector addition: v + u = (v1 + u1, v2 + u2)
T(v + u) = T(v1 + u1, v2 + u2) = ( (v1 + u1) (v2 + u2), (v1 + u1) + 2(v2 + u2) ) = (v1 v2 , v1 + 2v2) + (u1 u2, u1 +2u2) = T(v) + T(u)
Scalar multiplication: cv = c(v1, v2) = (cv1, cv2)T(cv) = (cv1 cv2, cv1+ 2cv2) = c(v1 v2, v1+ 2v2) = cT(v)
Therefore T is a linear transformation.
Section 6-1

Ming-Feng Yeh Chapter 6 6-7
Ex. 3: Not linear transformationEx. 3: Not linear transformation f(x) = sin(x)
In general, sin(x1 + x2) sin(x1) + sin(x2) f(x) = x2
In general, f(x) = x + 1
f(x1 + x2) = x1 + x2 + 1f(x1) + f(x2) = (x1 + 1) + (x2 + 1) = x1 + x2 + 2Thus, f(x1 + x2) f(x1) + f(x2)
22
21
221 )( xxxx
Section 6-1

Ming-Feng Yeh Chapter 6 6-8
Linear Operation &Linear Operation &Zero / Identity TransformationZero / Identity Transformation A linear transformation T: V V from a vector
space into itself is called a linear operator. Zero transformation (T: V W):
T(v) = 0, for all v Identity transformation (T: V V):
T(v) = v, for all v
Section 6-1

Ming-Feng Yeh Chapter 6 6-9
Thm 6.1: Linear transformationsThm 6.1: Linear transformations
Let T be a linear transformation from V into W, where u and v are in V. Then the following properties are true.
1. T(0) = 0
2. T(v) = T(v)
3. T(u v) = T(u) T(v)
4. If v = c1v1 + c2v2 + … + cnvn, thenT(v) = c1T(v1) + c2T(v2) + … + cnT(vn)
Section 6-1

Ming-Feng Yeh Chapter 6 6-10
Proof of Theorem 6.1Proof of Theorem 6.1
1. Note that 0v = 0. Then it follows thatT(0) = T(0v) = 0T(v) = 0
2. Follow from v = (1)v, which implies thatT(v) = T[(1)v] = (1)T(v) = T(v)
3. Follow from u v = u + (v), which implies thatT(u v) = T[u + (1)v] = T(u) + (1)T(v) = T(u) T(v)
4. Left to you
Section 6-1

Ming-Feng Yeh Chapter 6 6-11
Remark of Theorem 6.1Remark of Theorem 6.1 A linear transformation T: V W is determined
completely by its action on a basis of V.
If {v1, v2, …, vn} is a basis for the vector space V and if T(v1), T(v2), …, T(vn) are given, then T(v) is determined for any v in V.
Section 6-1
Ming-Feng Yeh Chapter 6 6-12
Ex 4: Linear transformationsEx 4: Linear transformations and bases and bases
Let T: R3 R3 be a linear transformation s.t.
T(1, 0, 0) = (2, 1, 4); T(0, 1, 0) = (1, 5, 2);
T(0, 0, 1) = (0, 3, 1). Find T(2, 3, 2). (2, 3, 2) = 2(1, 0, 0) + 3(0, 1, 0) 2(0, 0, 1)
T(2, 3, 2) = 2T(1, 0, 0) + 3T(0, 1, 0) 2T(0, 0, 1) = 2(2, 1, 4) + 3(1, 5, 2) 2(0, 3, 1) = (7, 7, 0)
Section 6-1

Ming-Feng Yeh Chapter 6 6-13
Ex 5: Linear transformationEx 5: Linear transformation defined by a matrix defined by a matrixThe function T: R2 R3 is defined as follows
Find T(v), where v = (2, 1)
Therefore, T(2, 1) = (6, 3, 0)
2
1
21
12
03
)(v
vAT vv
0
3
6
1
2
21
12
03
)( vv AT
Section 6-1

Ming-Feng Yeh Chapter 6 6-14
Example 5 (cont.)Example 5 (cont.) Show that T is a linear transformation from R2 to
R3.
1. For any u and v in R2, we haveT(u + v) = A(u + v) = Au +Av = T(u) +T(v)
2. For any u in R2 and any scalar c, we haveT(cu) = A(cu) = c(Au) = cT(u)
Therefore, T is a linear transformation from R2 to R3.
Section 6-1

Ming-Feng Yeh Chapter 6 6-15
Thm 6.2: Linear transformationThm 6.2: Linear transformation given by a matrix given by a matrix
Let A be an m n matrix. The function T defined byT(v) = Av
is a linear transformation from Rn into Rm.
In order to conform to matrix multiplication with an m n matrix, the vectors in Rn are represented by m 1 matrices and the vectors in Rm are represented by n 1 matrices.
Section 6-1

Ming-Feng Yeh Chapter 6 6-16
Remark of Theorem 6.2Remark of Theorem 6.2 The m n matrix zero matrix corresponds to the zero
transformation from Rn into Rm. The n n matrix identity matrix In corresponds to the
identity transformation from Rn into Rn. An m n matrix A defines a linear transformation from
Rn into Rm.
nmnmm
nn
nn
nmnmm
n
n
vavava
vavava
vavava
v
v
v
aaa
aaa
aaa
A
2211
2222121
1212111
2
1
21
22221
11211
v
nR mR
Section 6-1

Ming-Feng Yeh Chapter 6 6-17
Ex 7: Rotation in the planeEx 7: Rotation in the planeShow that the linear transformation T: R2 R2 given by the
matrix has the property that it rotates
every vector in counterclockwise about the origin through
the angle . Sol: Let
cossin
sincosA
),( yx
),( yxT
x
y)sin,cos(),( rryx v
)sin(
)cos(
sincoscossin
sinsincoscos
sin
cos
cossin
sincos)(
r
r
rr
rr
r
rAT vv
Section 6-1

Ming-Feng Yeh Chapter 6 6-18
Ex 8: A projection in REx 8: A projection in R33
The linear transformation T: R3 R3 given by
is called a projection in R3.
If v = (x, y, z) is a vector in R3,
then T(v) = (x, y, 0). In other words,
T maps every vector in R3 to its
orthogonal projection in the xy - plane.
000
010
001
A
xy
z
),,( zyx
)0,,(
),,(
yx
zyxT
Section 6-1

Ming-Feng Yeh Chapter 6 6-19
Ex 9: Linear transformationEx 9: Linear transformation from M from Mm,nm,n to M to Mn,mn,m
Let T: Mm,n Mn,m be the function that maps m n matrix A to its transpose. That is,Show that T is a linear transformation.
pf: Let A and B be m n matrix.
TAAT )(
mnnm
TT
TTT
MMT
AcTAccAcAT
BTATBABABAT
,, into formn nsformatiolinear tra a is
)()()()( and
)()()()(
Section 6-1

Ming-Feng Yeh Chapter 6 6-20
6.2 6.2 The Kernel and Range ofThe Kernel and Range of a Linear Transformation a Linear Transformation Definition of Kernel of a Linear Transformation
Let T:V W be a linear transformation. Then the set of all vectors v in V that satisfy T(v) = 0 is called the kernel of T and is denoted by ker(T).
The kernel of the zero transformation T: V W consists of all of V because T(v) = 0 for every v in V. That is,ker(T) = V.
The kernel of the identity transformation T: V V consists of the single element 0. That is, ker(T) = {0}.

Ming-Feng Yeh Chapter 6 6-21
Ex 3: Finding the kernelEx 3: Finding the kernel
Find the kernel of the projection T: R3 R3 given by T(x, y, z) = (x, y, 0).
Sol: This linear transformationprojects the vector (x, y, z)in R3 to the vector (x, y, 0)in xy-plane. Therefore,ker(T) = { (0, 0, z) : zR}
x y
z
)0,0,0(
),0,0( z
Section 6-2

Ming-Feng Yeh Chapter 6 6-22
Ex 4: Finding the kernelEx 4: Finding the kernel
Find the kernel of T: R2 R3 given by T(x1, x2) = (x1 2x2, 0, x1).
Sol: The kernel of T is the set of all x = (x1, x2) in R2 s.t. T(x1, x2) = (x1 2x2, 0, x1) = (0, 0, 0).Therefore, (x1, x2) = (0, 0). ker(T) = { (0, 0) } = { 0 }
Section 6-2

Ming-Feng Yeh Chapter 6 6-23
Ex 5: Finding the kernelEx 5: Finding the kernelFind the kernel of T: R3 R2 defined by T(x) = Ax, where
Sol: The kernel of T is the set of all x = (x1, x2, x3) in R3 s.t. T(x1, x2, x3) = (0, 0). That is,
Therefore, ker(T) = {t(1, 1,1): tR} = span{(1, 1,1) }
321
211A
Rt
t
t
t
x
x
x
x
x
x
,
0
0
321
211
3
2
1
3
2
1
Section 6-2

Ming-Feng Yeh Chapter 6 6-24
Thm 6.3: Kernel is a subspaceThm 6.3: Kernel is a subspace
The kernel of a linear transformation T: V W is a subspace of the domain V.
pf: 1. ker(T) is a nonempty subset of V.
2. Let u and v be vectors in ker(T). ThenT(u + v) = T(u) + T(v) = 0 + 0 = 0 (vector addition)Thus, u + v is in the kernel
3. If c is any scalar, then T(cu) = cT(u) = c0 = 0(scalar multiplication), Thus, cu is in the kernel.
The kernel of T sometimes called the nullspace of T.
Section 6-2

Ming-Feng Yeh Chapter 6 6-25
Ex 6: Finding a basis for kernelEx 6: Finding a basis for kernelLet T: R5 R4 be defined by T(x) = Ax, where x is in R5
and .
Find a basis for ker(T) as a subspace of R5.
82000
10201
01312
11021
A
Section 6-2

Ming-Feng Yeh Chapter 6 6-26
Example 6 (cont.)Example 6 (cont.)
Thus one basis for the kernel T is given by
B = { (2, 1, 1, 0, 0), (1, 2, 0, 4, 1) }
1
4
0
2
1
0
0
1
1
2
0
0
0
0
0
82000
10201
01312
11021
5
4
3
2
1
5
4
3
2
1
ts
x
x
x
x
x
x
x
x
x
x
Section 6-2

Ming-Feng Yeh Chapter 6 6-27
Solution SpaceSolution Space A basis for the kernel of a linear transformation
T(x) = Ax was found by solving the homogeneous system given by Ax = 0.
It is the same produce used to find the solution space of Ax = 0.
Section 6-2

Ming-Feng Yeh Chapter 6 6-28
Thm 6.4: Range is a subspaceThm 6.4: Range is a subspaceThe range of a linear transformation T: V W is a subspace
of the domain W. range(T) = { T(v): v is in V } ker(T) is a subspace of V.pf: 1. range(T) is a nonempty because T(0) = 0.2. Let T(u) and T(v) be vectors in range(T). Because u and v
are in V, it follows that u + v is also in V. Hence the sumT(u) + T(v) = T(u + v) is in the range of T. (vector addition)
3. Let T(u) be a vector in the range of T and let c be a scalar. Because u is in V, it follows that cu is also in V. Hence, cT(u) = T(cu) is in the range of T. (scalar multiplication)
Section 6-2
The Range of a Linear Transform

Ming-Feng Yeh Chapter 6 6-29
Figure 6.6Figure 6.6
T: V W
V
W0
Codomain
Range
Domain
Kernel ker(T) is a subspace of V
range(T) is a subspace of W
Section 6-2

Ming-Feng Yeh Chapter 6 6-30
Column SpaceColumn Space To find a basis for the range of a linear transformation
defined by T(x) = Ax, observe that the range consists of all vectors b such that the system Ax = b is consistent.
b is in the range of T if and only if b is a linear combination of the column vectors of A.
bx
mmn
n
n
n
mnmnmm
n
n
b
b
b
a
a
a
x
a
a
a
x
x
x
x
aaa
aaa
aaa
A
2
1
2
1
1
21
11
12
1
21
22221
11211
Section 6-2
Ming-Feng Yeh Chapter 6 6-31
Corollary of Theorems 6.3 & 6.4Corollary of Theorems 6.3 & 6.4
Let T: Rn Rm be the linear transformation given by T(x) = Ax.
[Theorem 6.3] The kernel of T is equal to the solution space of Ax = 0.
[Theorem 6.4] The column space of A is equal to the range of T.
Section 6-2

Ming-Feng Yeh Chapter 6 6-32
Ex 7: Finding a basis for rangeEx 7: Finding a basis for rangeLet T: R5 R4 be the linear transform given in Example 6.
Find a basis for the range of T.Sol: The row echelon of A:
One basis for the range of T isB = { (1, 2, 1, 0), (2, 1, 0, 0), (1, 1, 0, 2) }
00000
41000
20110
10201
82000
10201
01312
11021
A
Section 6-2

Ming-Feng Yeh Chapter 6 6-33
Rank and NullityRank and Nullity
Let T: V W be a linear transformation. The dimension of the kernel of T is called the
nullity of T and is denoted by nullity(T). The dimension of the range of T is called the
rank of T and is denoted by rank(T).
Section 6-2

Ming-Feng Yeh Chapter 6 6-34
Thm 6.5: Sum of rank and nullityThm 6.5: Sum of rank and nullity Let T: V W be a linear transformation from an
n-dimension vector space V into a vector space W. Then the sum of the dimensions of the range and the kernel is equal to the dimension of the domain. That is,rank(T) + nullity(T) = nordim(range) + dim(kernel) = dim(domain)
Section 6-2
Ming-Feng Yeh Chapter 6 6-35
Proof of Theorem 6.5Proof of Theorem 6.5 The linear transformation from an n-dimension vector
space into an m-dimension vector space can be represented by a matrix, i.e., T(x) = Ax where A is an m n matrix. Assume that the matrix A has a rank of r. Then,
rank(T) = dim(range of T) = dim(column space) = rank(A) = r
From Thm 4.7, we have
nullity(T) = dim(kernel of T) = dim(solution space) = n rThus,
rank(T) + nullity(T) = n + (n r) = n
Section 6-2

Ming-Feng Yeh Chapter 6 6-36
Ex 8: Finding the rank & nullityEx 8: Finding the rank & nullity
Find the rank and nullity of T: R3 R3 defined by
the matrix
Sol: Because rank(A) = 2, the rank of T is 2.
The nullity is dim(domain) – rank = 3 – 2 = 1.
000
110
201
A
Section 6-2

Ming-Feng Yeh Chapter 6 6-37
Ex 8: Finding the rank & nullityEx 8: Finding the rank & nullity
Let T: R5 R7 be a linear transformation Find the dimension of the kernel of T if the
dimension of the range is 2.dim(kernel) = n – dim(range) = 5 – 2 = 3
Find the rank of T if the nullity of T is 4rank(T) = n – nullity(T) = 5 – 4 = 1
Find the rank of T if ker(T) = {0}rank(T) = n – nullity(T) = 5 – 0 = 5
Section 6-2
Ming-Feng Yeh Chapter 6 6-38
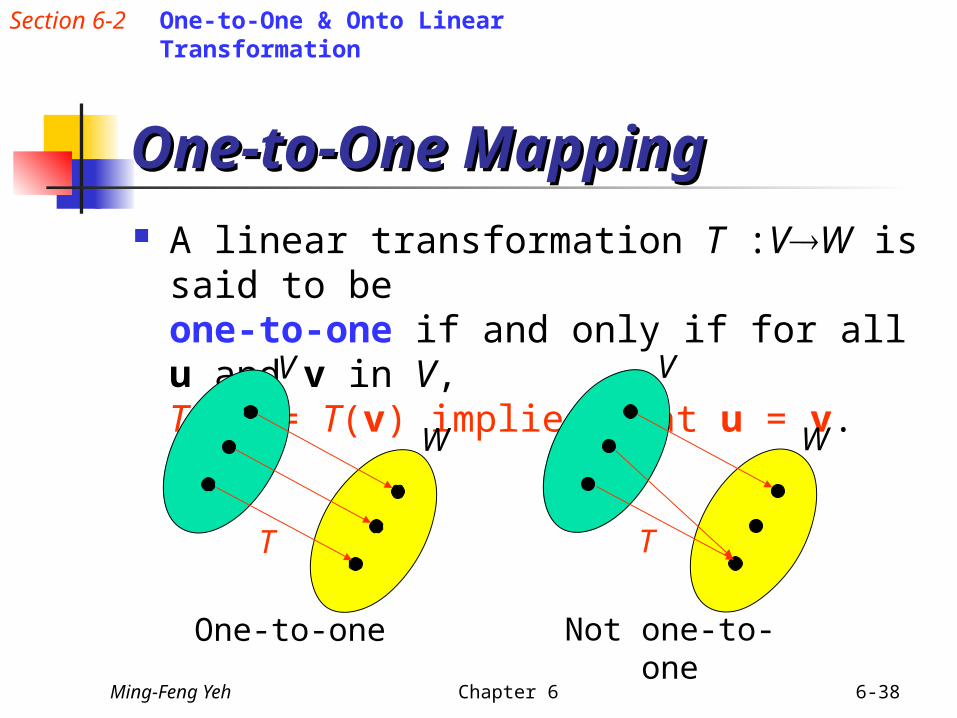
One-to-One MappingOne-to-One Mapping A linear transformation T :VW is said to be
one-to-one if and only if for all u and v in V,T(u) = T(v) implies that u = v.
One-to-One & Onto Linear Transformation
Section 6-2
V
W
T
One-to-one
V
W
T
Not one-to-one

Ming-Feng Yeh Chapter 6 6-39
Thm 6.6: One-to-one LinearThm 6.6: One-to-one Linear transformation transformationLet T :VW be a linear transformation. Then T is one-to-one
if and only if ker(T) = {0}.
pf: 」 Suppose T is one-to-one. Then T(v) = 0 can have only one solution: v = 0. In this case, ker(T) = {0}. 」 Suppose ker(T) = {0} and T(u) = T(v). Because T is a linear transformation, it follows that T(u – v) = T(u) – T(v) = 0 This implies that u – v lies in the kernel of T and must therefore equal 0. Hence u – v = 0 and u = v, and we can conclude that T is one-to-one.
Section 6-2
Ming-Feng Yeh Chapter 6 6-40
Example 10Example 10 The linear transformation T: Mm,n Mn,m given by
is one-to-one because its kernel consists of only the m n zero matrix.
The zero transformation T: R3 R3 is not one-to-one because its kernel is all of R3.
TAAT )(
Section 6-2

Ming-Feng Yeh Chapter 6 6-41
Onto Linear TransformationOnto Linear Transformation A linear transformation T :VW is said to be onto
if every element in W has a preiamge in V. T is onto W when W is equal to the range of T. [Thm 6.7] Let T :VW be a linear transformation,
where W is finite dimensional. Then T is onto if and only if the rank of T is equal to the dimension of W, i.e., rank(T) = dim(W).
One-to-one: ker(T) = {0} or nullity(T) = 0
Section 6-2

Ming-Feng Yeh Chapter 6 6-42
Thm 6.8: One-to-one and ontoThm 6.8: One-to-one and onto linear transformation linear transformation Let T :VW be a linear transformation with vector
spaces V and W both of dimension n.Then T is one-to-one if and only if it is onto.
pf: 」 If T is one-to-one, then ker(T) = {0} and dim(ker(T)) = 0. In this case, dim(range of T) = n – dim(ker(T)) = n = dim(W). By Theorem 6.7, T is onto. 」 If T is onto, then dim(range of T) = dim(W) = n. Which by Theorem 6.5 implies that dim(ker(T)) = 0 By Theorem 6.6, T is onto-to-one.
Section 6-2

Ming-Feng Yeh Chapter 6 6-43
Example 11Example 11The linear transformation T:RnRm is given by T(x) = Ax.
Find the nullity and rank of T and determine whether T is one-to-one, onto, or either.
000
110
021
)(,110
021)(,
00
10
21
)(,
100
110
021
)( AdAcAbAa
T:RnRm dim(domain) rank(T) nullity(T) one-to-one onto
(a) T:R3 R3 3 3 0 Yes Yes
(b) T:R2 R3 2 2 0 Yes No
(c) T:R3 R2 3 2 1 No Yes
(d) T:R3 R3 3 2 1 No No
Section 6-2

Ming-Feng Yeh Chapter 6 6-44
IsomorphismIsomorphism
Def: A linear transformation T :VW that is one-to-one and onto is called isomorphism. Moreover, if V and W are vector spaces such that there exists an isomorphism from V to W, then V and W are said to be isomorphic to each other.
Theorem 6.9: Isomorphism Spaces & DimensionTwo finite-dimensional vector spaces V and W are isomorphic if and only if they are of the same dimension.
Section 6-2
Isomorphisms of Vector Spaces

Ming-Feng Yeh Chapter 6 6-45
Ex 12: Isomorphic Vector SpacesEx 12: Isomorphic Vector Spaces
The following vector spaces are isomorphic to each other.
R4 = 4-space M4,1 = space of all 4 1 matrices
M2,2 = space of all 2 2 matrices
P3 = space of all polynomials of degree 3 or less
V = {(x1, x2, x3, x4, 0): xi is a real number} (subspace of R5)
Section 6-2

Ming-Feng Yeh Chapter 6 6-46
6.3 6.3 Matrices forMatrices for Linear Transformation Linear Transformation Which one is better?
The key to representing a linear transformation T:VW by a matrix is to determine how it acts on a basis of V.
Once you know the image of every vector in the basis, you can use the properties of linear transformations to determine T(v) for any v in V.
)43,23,2(),,( 32321321321 xxxxxxxxxxxT
3
2
1
430
231
112
)(
x
x
x
AT xxSimpler to write. Simpler to read, and more adapted for computer use.

Ming-Feng Yeh Chapter 6 6-47
Thm 6.10: Standard matrix forThm 6.10: Standard matrix for a linear transformation a linear transformationLet T: RnRm be a linear transformation such that
Then the m n matrix whose n columns corresponds to
is such that T(v) = Av for every
v in Rn. A is called the standard
matrix for T.
Section 6-3
mn
n
n
n
mm a
a
a
TT
a
a
a
TT
a
a
a
TT
2
1
2
22
12
2
1
21
11
1 )
1
0
0
()(,,)
0
1
0
()(,)
0
0
1
()( eee
),( iT e
mnmm
n
n
aaa
aaa
aaa
A
21
22221
11211

Ming-Feng Yeh Chapter 6 6-48
Proof of Theorem 6.10Proof of Theorem 6.10Let
Because T is a linear transformation, we have
On the other hand,
.221121n
nnT
n Rvvvvvv eeev
)()()()()()(
)()(
2211
2211
2211
nn
nn
nn
TvTvTvvTvTvT
vvvTT
eeeeee
eeev
)()()()( 2211
2
1
2
22
12
2
1
21
11
12
1
21
22221
11211
veee
v
TTvTvTva
a
a
v
a
a
a
v
a
a
a
v
v
v
v
aaa
aaa
aaa
A
nn
mn
n
n
n
mmnmnmm
n
n
Section 6-3

Ming-Feng Yeh Chapter 6 6-49
Example 1 Example 1 Find the standard matrix for the linear transformation
T: R3R2 defined by T(x, y, z) = ( x – 2y, 2x + y)
Sol:
0
0
1
0
0
)()0,0()1,0,0()(
1
2
0
1
0
)()1,2()0,1,0()(
2
1
0
0
1
)()2,1()0,0,1()(
33
22
11
TTTT
TTTT
TTTT
ee
ee
ee
Section 6-3

Ming-Feng Yeh Chapter 6 6-50
Example 1 (cont.)Example 1 (cont.)
Note that
which is equivalent to T(x, y, z) = ( x – 2y, 2x + y).
012
021)()()( 321 eee TTTA
yx
yx
z
y
x
z
y
x
A2
2
012
021
Section 6-3
Ming-Feng Yeh Chapter 6 6-51
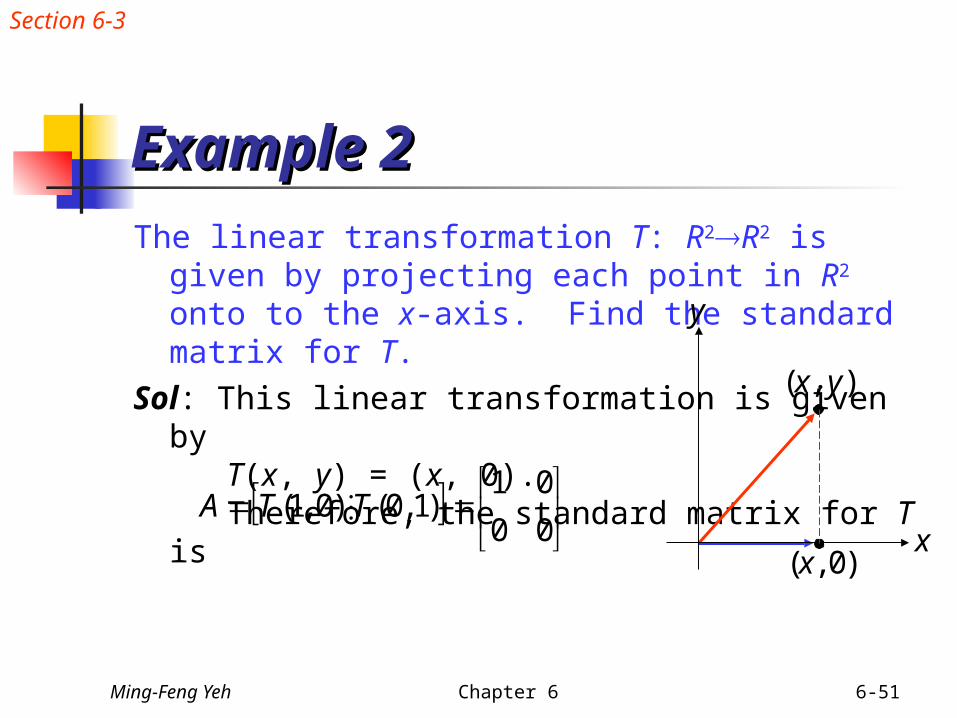
Example 2Example 2The linear transformation T: R2R2 is given by projecting
each point in R2 onto to the x-axis. Find the standard matrix for T.
Sol: This linear transformation is given by T(x, y) = (x, 0). Therefore, the standard matrix for T is
00
01)1,0()0,1( TTA
x
y
),( yx
)0,(x
Section 6-3
Ming-Feng Yeh Chapter 6 6-52
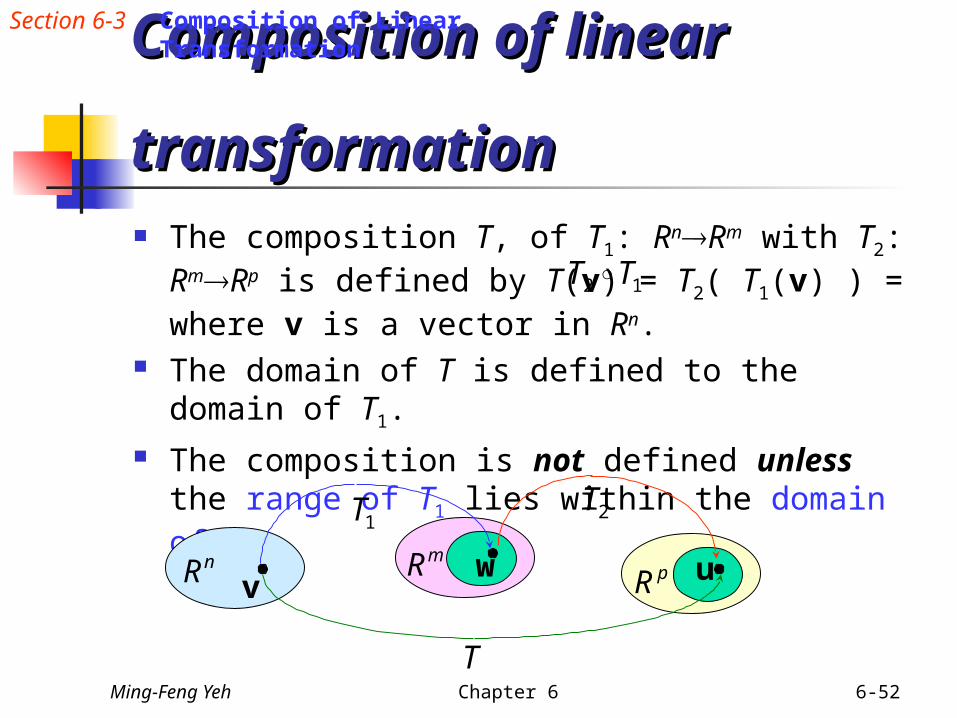
Composition of linearComposition of linear transformation transformation The composition T, of T1: RnRm with T2: RmRp is
defined by T(v) = T2( T1(v) ) = where v is a vector in Rn.
The domain of T is defined to the domain of T1.
The composition is not defined unless the range of T1 lies within the domain of T2.
Section 6-3
Composition of Linear Transformation
12 TT
nR vwmR pR u
1T 2T
T

Ming-Feng Yeh Chapter 6 6-53
Theorem 6.11Theorem 6.11
Let T1: RnRm and T2: RmRp be linear transformation with standard matrix A1 and A2.
The composition T: RnRp, defined by T(v) = T2( T1(v) ), is linear transformation.
Moreover, the standard matrix of A for T is given by the matrix product A = A2A1.
Section 6-3
Ming-Feng Yeh Chapter 6 6-54
Proof of Theorem 6.11Proof of Theorem 6.111. Let u and v be vectors in Rn and let c be any scalar.
Because T1 and T2 are linear transformation,T(u + v) = T2(T1(u + v)) = T2(T1(u) + T1(v)) = T2(T1(u)) + T2(T1(v)) = T(u) + T(v). T(cv) = T2(T1(cv)) = T2(cT1(v)) = cT2(T1(v)) = cT(v).
Thus, T is a linear transformation.2. T(v) = T2(T1(v)) = T2(A1v) = A2(A1v) = A2A1v
In general, the composition is not the same as
Section 6-3
12 TT .21 TT

Ming-Feng Yeh Chapter 6 6-55
Example 3Example 3Let T1 and T2 be linear transformation R3 from R3 such that andFind the standard matrices for the compositionsand .Sol: The standard matrices for T1 and T2 are
Section 6-3
),0,2(),,(1 zxyxzyxT ),,(),,(2 yzyxzyxT 12 TTT
21 TTT
010
100
011
,
101
000
012
21 AA
001
000
122
,
000
101
012
1221 AAATAAAT

Ming-Feng Yeh Chapter 6 6-56
Inverse Linear TransformationInverse Linear Transformation One benefit of matrix representation is that it can
represent the inverse of a linear transformation.
[Definition] If T1:RnRn and T2:RnRn are linear transformations such that T2(T1(v)) = v and T1(T2(v)) = v, then T2 is called the inverse of T1 and T1 is said to be invertible.
Section 6-3

Ming-Feng Yeh Chapter 6 6-57
Theorem 6.12Theorem 6.12 Let T:RnRn be linear transformation with
standard matrix A. Then the following conditions are equivalent.1. T is invertible.2. T is an isomorphism.3. A is invertible.And, if T is invertible with standard matrix A, then the standard matrix for is .
Section 6-3
1T 1A

Ming-Feng Yeh Chapter 6 6-58
Example 4Example 4The linear transformation T: R3R3 is defined by
Show that T is invertible, and find its inverse.
Sol:
A is invertible. Its inverse is
Therefore T is invertible and its standard matrix is
Section 6-3
)42,33,32(),,( zyxzyxzyxzyxT
0)det(
142
133
132
AA
326
101
0111A
.1A

Ming-Feng Yeh Chapter 6 6-59
Example 4 (cont.)Example 4 (cont.)Using the standard matrix for the inverse, we can find the rule
for by computing the image of an arbitrary vector
Section 6-3
1T).,,( zyxv
).326,,(),,(1 zyxzxyxzyxT
yyx
zx
yx
z
y
x
T
326326
101
011
)(1 v

Ming-Feng Yeh Chapter 6 6-60
Nonstandard BasesNonstandard Bases Finding a matrix for a linear transformation T:VW, where
B and are ordered bases for V and W, respectively. The coordinate matrix of v relative to B is [v]B. To represent the linear transformation T, A must be
multiplied by a coordinate matrix relative to B. The result of the multiplication will be a coordinate
matrix relative to . A is called the matrix of T relative to the
bases B and .
Section 6-3
Nonstandard Bases and General Vector Spaces
B
.][)]([ BB AT vv
B
B

Ming-Feng Yeh Chapter 6 6-61
Transformation MatrixTransformation MatrixLet V and W be finite-dimensional vector spaces with bases
B and , respectively, whereIf T:VW is a linear transformation such that
then the m n matrix whose n columns correspond to
is s.t. for every v in V.
Section 6-3
B }...,,,{ 21 nB vvv
,)]([,,)]([,)]([ 2
1
2
22
12
2
1
21
11
1
mn
n
n
Bn
m
B
m
B
a
a
a
T
a
a
a
T
a
a
a
T
vvv
,)]([ BT v
,
21
22221
11211
mnmm
n
n
aaa
aaa
aaa
A
BB AT ][)]([ vv

Ming-Feng Yeh Chapter 6 6-62
Example 5Example 5Let T: R2R2 be a linear transformation defined by
. Find the matrix of T relative to the
bases and
Sol:
Therefore the coordinate matrices of T(v1) and T(v2) relative
to are
The matrix for T relative to B and is
Section 6-3
)2,(),( yxyxyxT )}1,1(),2,1{( B )}1,0(),0,1{(B
v1 v2 w1 w2
212
211
30)3,0()1,1()(
03)0,3()2,1()(
wwv
wwv
TT
TT
B .30)]([,03)]([ T2
T1 BB TT vv
B
30
03A

Ming-Feng Yeh Chapter 6 6-63
Example 6Example 6For the linear transformation T: R2R2 given in Example 5,
use the matrix A to find T(v), where v = (2, 1).
Sol:
Section 6-3
)}1,1(),2,1{( B
1
1][)1,1(1)2,1(1)1,2( Bvv
3
3
1
1
33
03][)]([ BB AT vv
).3,3()1,0(3)0,1(3)()}1,0(),0,1{( vTB
)3,3()1,2()2,(),(:5 TyxyxyxTEx

Ming-Feng Yeh Chapter 6 6-64
6.4 6.4 Transition Matrix andTransition Matrix and Similarity Similarity The matrix of a linear transformation T:VV
depends on the basis of V. The matrix of T relative to a basis B is different
from the matrix of T relative to another basis Is is possible to find a basis B such that the matrix
of T relative to B is diagonal?
B
Ming-Feng Yeh Chapter 6 6-65
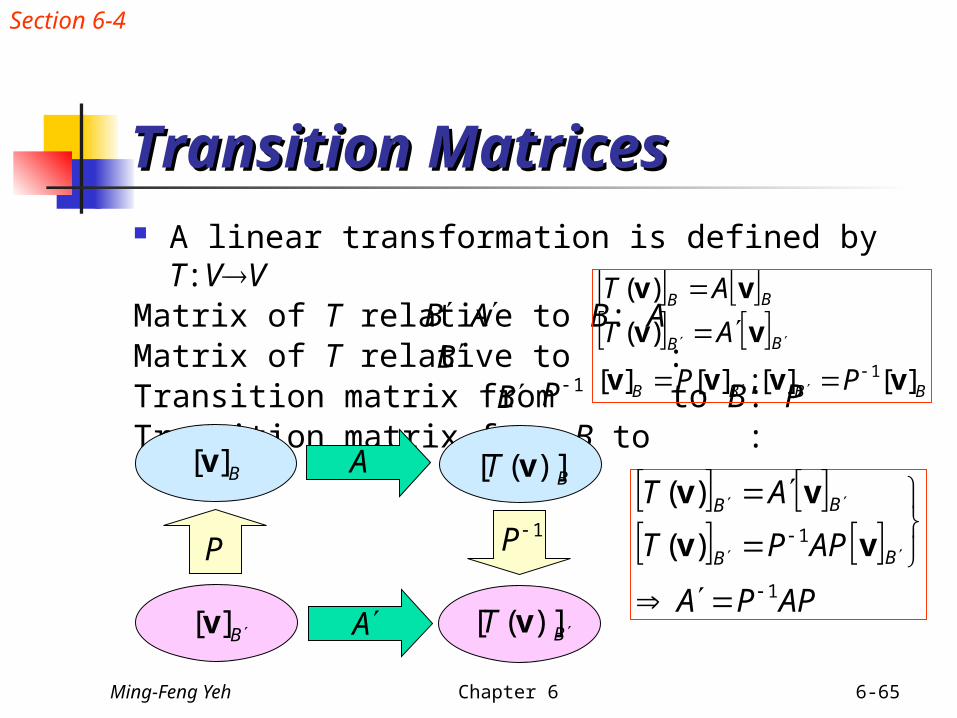
Transition MatricesTransition Matrices A linear transformation is defined by T:VV Matrix of T relative to B: A Matrix of T relative to :Transition matrix from to B: PTransition matrix from B to :
BB
B
A
1P
AB][vBT )]([ v
AB][v BT )]([ v
1PP
APPA
APPT
AT
BB
BB
1
1)(
)(
vv
vv
BBBB
BB
BB
PP
AT
AT
][][;][][
)(
)(
1 vvvv
vv
vv
Section 6-4
Ming-Feng Yeh Chapter 6 6-66
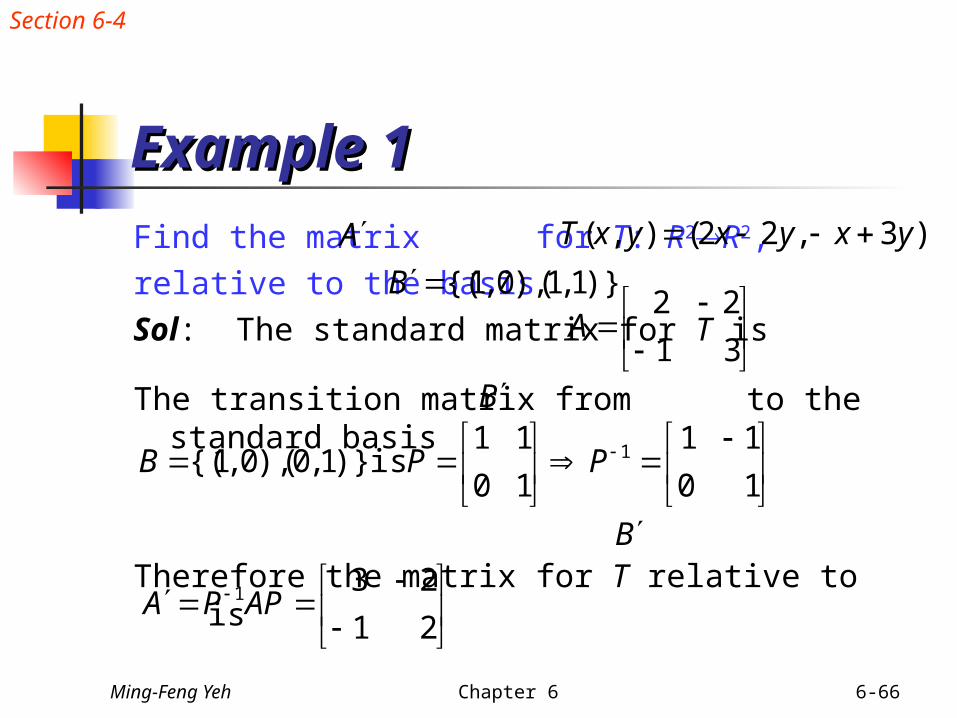
Example 1Example 1Find the matrix for T: R2R2,
relative to the basis
Sol: The standard matrix for T is
The transition matrix from to the standard basis
Therefore the matrix for T relative to is
A )3,22(),( yxyxyxT )}.1,1(),0,1{(B
31
22A
B
10
11
10
11 is )}1,0(),0,1{( 1PPB
B
21
231APPA
Section 6-4

Ming-Feng Yeh Chapter 6 6-67
Example 2Example 2Let and
be bases for R2, and let be the matrix for
T: R2R2 relative to B. Find
Sol: In Example 5 in Section 4.7,
The matrix of T relative to is given by
)}.2,2(),2,1{( B)}2,4(),2,3{( B
73
72A
.A
32
21,
12
23 1PP
B
31
121APPA
Section 6-4

Ming-Feng Yeh Chapter 6 6-68
Example 3Example 3For the linear transformation T: R2R2 given in Example 2,
find , , and for the vector v whose coordinate matrix
Sol:
B][v BT )]([ v BT )]([ v T13][ Bv
B
BB
BB
BB
A
TPT
AT
P
][
0
7
14
21
32
21)]([)]([
14
21
5
7
73
72][)]([
5
7
1
3
12
23][][
1
v
vv
vv
vv
Section 6-4
Ming-Feng Yeh Chapter 6 6-69
Similar MatricesSimilar Matrices[Definition] For square matrices A and of order n,
is said to be similar to A if there exists an invertible matrix
P such that
[Theorem 6.13] Let A, B, and C be square matrices of order n, Then the following properties are true.1. A is similar to A.2. If A is similar to B, then B is similar to A.3. If A is similar to B and B is similar to C, then A is similar to C.
Section 6-4
Similar Matrices
AA
.1APPA

Ming-Feng Yeh Chapter 6 6-70
Example 5Example 5
Suppose is the matrix for T: R3R3 relative
the standard basis. Find the matrix for T relative to the basis
Sol: The transition matrix from to the standard matrix is
Section 6-4
200
013
031
A
)}1,0,0(),0,1,1(),0,1,1{( B
B
200
020
004
100
0
0
100
011
0111
21
21
21
21
1 APPAPP

Ming-Feng Yeh Chapter 6 6-71
6.5 6.5 Applications of LinearApplications of Linear Transformation Transformation
The geometry of linear transformations in the planeReflection in the y-axis Reflection in the x-axis
y
x
y
x
yxyxT
10
01
),(),(
y
x
y
x
yxyxT
10
01
),(),(
x
y),( yx),( yx
x
y),( yx
),( yx

Ming-Feng Yeh Chapter 6 6-72
Reflection in the PlaneReflection in the PlaneReflection in the line y = x
x
y
y
x
xyyxT
01
10
),(),(
x
y
),( yx
),( xy
xy
Section 6-5

Ming-Feng Yeh Chapter 6 6-73
Expansions & ContractionsExpansions & Contractions in the Plane -- Horizontal in the Plane -- Horizontal
y
kx
y
xk
ykxyxT
10
0
),(),(
x
y
),( yx
Contraction: 0 < k <1
),( ykx
x
y
),( yx
Expansion: k >1
),( ykx
Section 6-5

Ming-Feng Yeh Chapter 6 6-74
Expansions & ContractionsExpansions & Contractions in the Plane -- Vertical in the Plane -- Vertical
ky
x
y
x
k
kyxyxT
0
01
),(),(
x
y
),( yx
Contraction: 0 < k <1
),( ykx
Expansion: k >1
x
y
),( yx
),( ykx
Section 6-5

Ming-Feng Yeh Chapter 6 6-75
Shears in the PlaneShears in the Plane
y
kyx
y
xk
ykyxyxT
10
1
),(),(Horizontal shear:
x
y),( yx
),( ykyx
ykx
x
y
x
k
kxyxyxT
1
01
),(),(Vertical shear:
x
y
),( yx
),( ykxx
Section 6-5

















