29
Chapter 12 Multiplexing
| Date post: | 02-Jan-2016 |
| Category: |
Documents |
| Upload: | deanna-vega |
| View: | 15 times |
| Download: | 2 times |

Chapter 12
Multiplexing
Objectives (1 of 3)
• Describe a typical truck data bus.
• List the key data bus hardware components.
• Define the word multiplexing.
• Describe how multiplexing can make data exchange more efficient.
• Outline how a J1939/CAN 2.0 data bus functions.

Objectives (2 of 3)
• Access J1587/1708 and J1939 data buses using an ATA data connector.
• Explain how a “smart” ladder switch operates.
• List the seven essential fields that make up a data frame on a truck data bus transaction.

Objectives (3 of 3)
• Explain how FETs are used as relays to effect data bus outcomes.
• Access a message identifier on a truck chassis data bus with multiple networked electronic systems.
• Outline the procedure required to access a failure mode indicator (FMI) using electronic service tools.

Multiplexing (1 of 3)
• Data bus communications make use of a technology called multiplexing.
• Multiplexing means data-sharing between multiple system control modules.
• Today, technicians regularly access the truck data bus to troubleshoot, reprogram, and read the systems within it.

Multiplexing (2 of 3)
• Common language: giving electronic subsystems a common communication language
• Information highway: Using a data bus allows data signals to take the place of hard wire.
• New trucks network all of the electronic controllers in a chassis in a way that:– Simplifies the hardware
– Eliminates miles of hard wiring
– Reduces the number of I/O (in-out) pins on modules
– Optimizes vehicle operation

Multiplexing (3 of 3)
• So what do you really have to know about multiplexing today? – If you have ever used a 6-pin or 9-pin ATA
connector to connect a diagnostic reader or shop computer to read the electronic systems on a truck, you already have some experience in accessing a truck data bus.
Multiplexing, Clients, and Servers
• Client: Anyone or anything that wants something is referred to as a client.
• Server: The fulfillment of a client need is provided by a server.
• Data backbone: It serves as a path for connecting clients with servers.
• Packets: The messages are known as packets.
Multiplexing
• Bandwidth– The speed limit in telecommunications is
measured in baud and K-baud.
• Protocols– They are rules and regulations to simplify
electronic transactions.
• Analog inputs are converted to digital signals by the receiving processor.

Power Line Carrier
• A more primitive method of multiplexing known as power line carrier has been in use in trucks since 1985.
• Because all the wires on a standard SAE J560, 7-pin connector between truck and trailer were already dedicated, power line carrier technology was used to convert a communication signal to a radio frequency signal and then superimpose it over the 12-volt auxiliary power wire.

Serial Data Transmission
• Controller area network (CAN)– A data bus system developed by Robert Bosch and
Intel for vehicle applications.
– A serial data transmission network used for the following applications in a vehicle:
• Electronic control module (ECM) networking
• Comfort and convenience electronics
• Mobile on-board and external communications
– CAN 2.0 is the basis for SAE J1939• J1939 is about 25 times faster than J1587/1708.
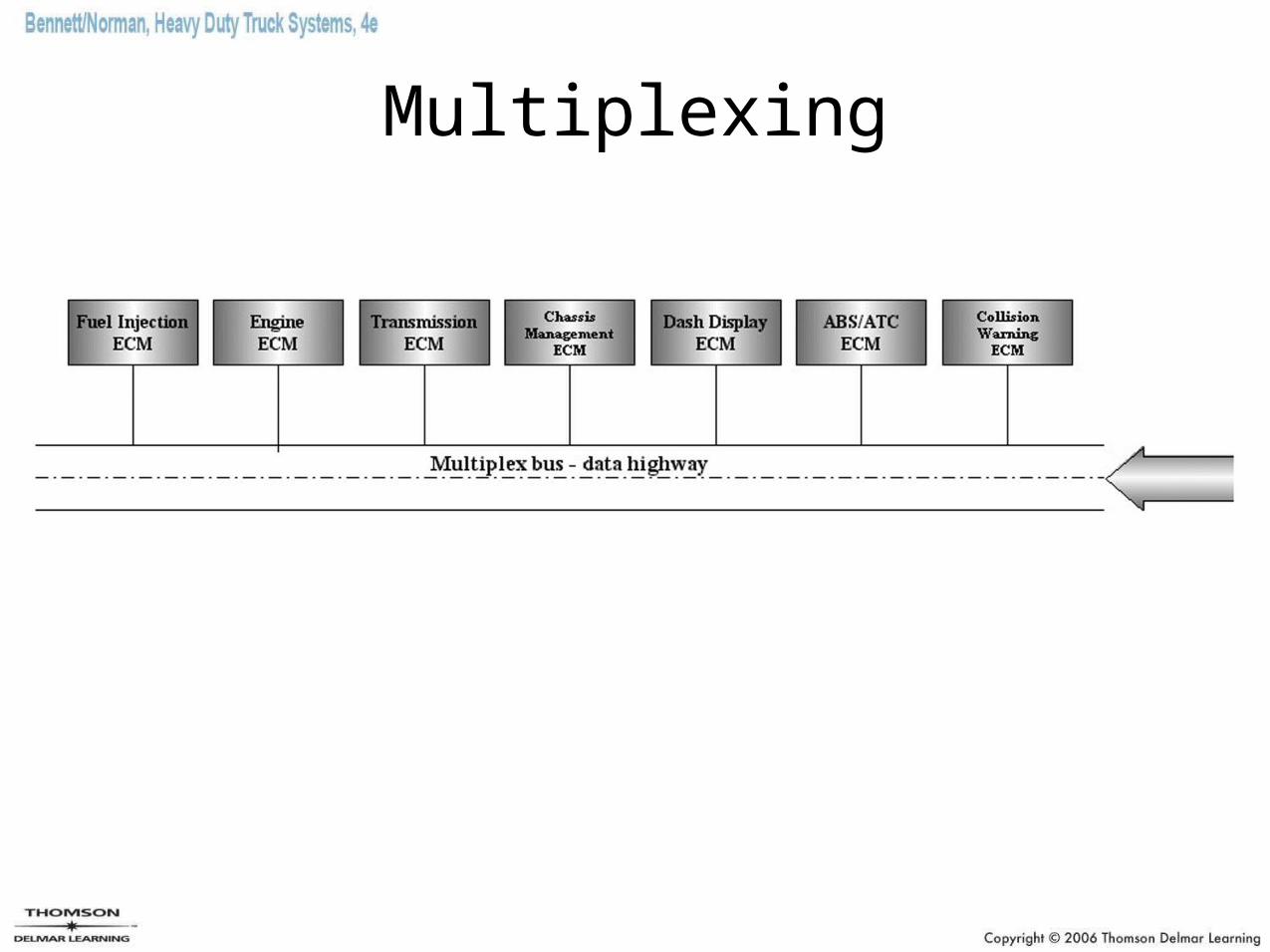
Multiplexing
Bus Topology
• The word topology means an organized structural system that remains unaffected when subjected to a sequence of events.
• The term bus topology is used in multiplexing to indicate that no single controller networked to the bus has more priority or status than another: – No ECM/ECU is “in charge.”
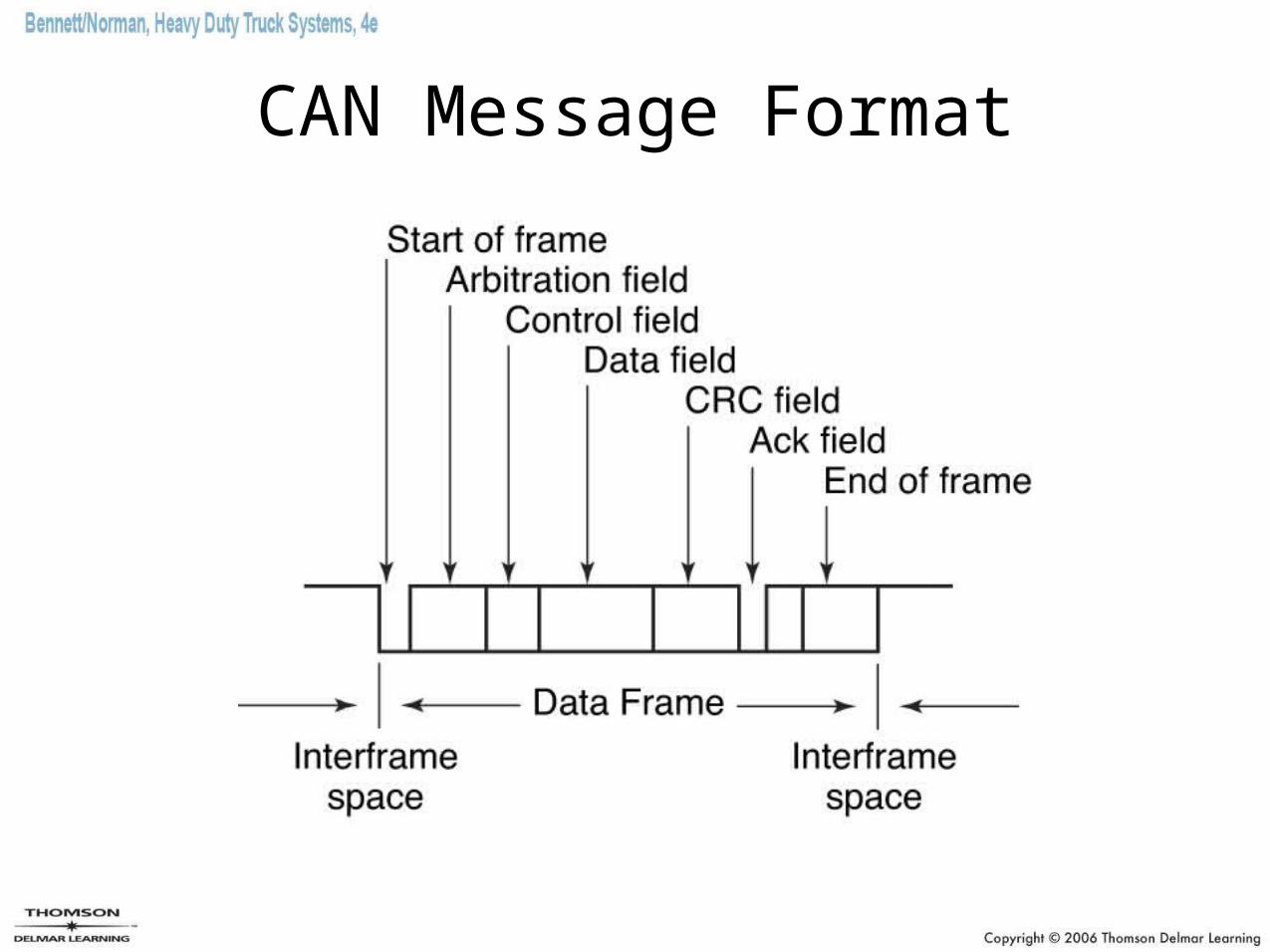
CAN Message Format

Message Bit Encoding of a Data Packet

Message Bit Encoding
• How a freightliner data packet is sequenced and the number of bits dedicated to each segment
• Remember that there are 8 bits to a byte.
Shop Talk
• CAN H (high) and CAN L (low) on a J1939 are not referenced to ground but to each other.
• CAN H and CAN L are referred to by some OEMs as CAN+ and CAN-.
Reasons for Twisting Data Wires
• Provide immunity to magnetic fields
• Provide consistent capacitance values
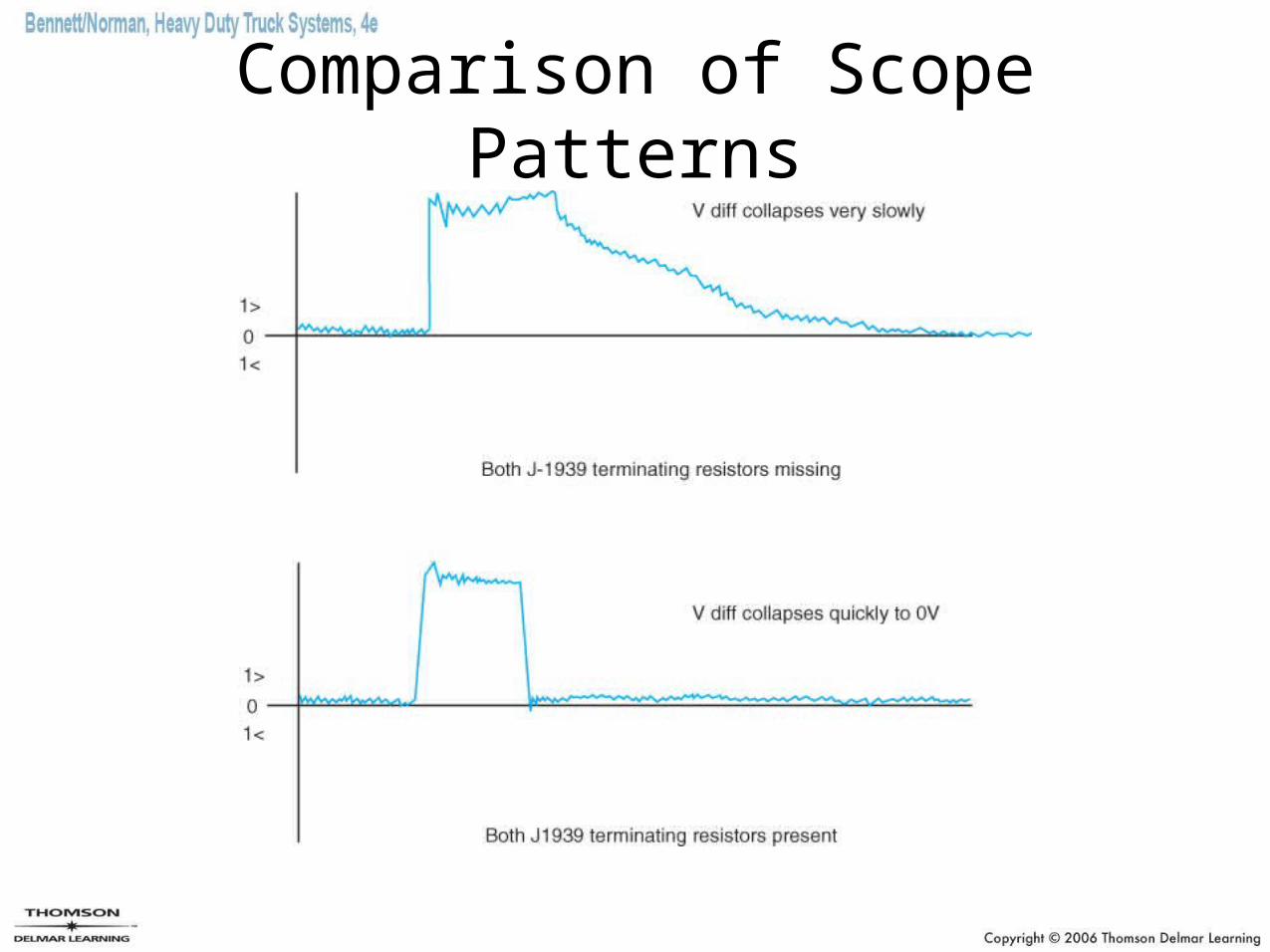
Comparison of Scope Patterns

Shop Talk
• When repairing low-bus, twisted wires, avoid twisting the wires together prior to soldering.
• Lay the wires you wish to solder so they contact each other, then apply tin solder.– Twisting the wires together and applying a
large blob of solder can create unacceptably high circuit resistance.
Data Bus Repairs
• Physical damage to any data bus described as high bus (shielded) warrants replacement, not repair.
• High bus lines are shielded. • A J1939 high bus consists of:
– The twisted-wire pair (communication wires)– A shield wire– Often a couple of filler wires that function to
keep the communication wires separate
Shop Talk
• When troubleshooting, if you disconnect a smart switch, a code will be logged immediately.
• Always use the system self-diagnostics to locate problems.

FET Operation

Shop Talk
• When adding loads to a multiplexed truck chassis, always consult the OEM service literature.
• Splicing into circuits can cause electrical problems that become very difficult to troubleshoot.

Caution
• Never splice into existing fuses in chassis power distribution modules to source a battery voltage requirement.
• In dealerships today, it is not uncommon to hear horror stories that result when a truck driver splices into a “hot” wire to power up his CB radio.
• Most OEMs provide non-dedicated terminals in their power distribution module that can be used for auxiliary electrical requirements such as CBs.
• Use the OEM literature and wiring schematics when connecting auxiliary electrical equipment.

Summary (1 of 4)
• Multiplexing means the ability of electronic components to exchange information by means of a common data bus.
• Multiplexing can eliminate miles of chassis harness wiring and duplication of hardware devices such as throttle position sensors by giving electronic subsystems a common communication language, and by using a data bus or information highway which allows data signals to take the place of hard wire in the electronic input and output circuits.

Summary (2 of 4)
• The data bus acts as the “information highway” in a multiplexed electronic truck chassis.
• A “smart” ladder switch contains a ladder of resistors.– The processor that receives a signal from
the switch can interpret switch status data by comparing ladder resistances with a programmed library of resistance values that identify the switch, its status, and circuit integrity.

Summary (3 of 4)
• The fields that usually make up a data frame on a truck data bus transaction are start of frame field, arbitration field, control field, data field, cyclic redundancy check field, ack field, and end of frame field.
• Access to a truck data bus is obtained by using one of two types of ATA connectors. – A 6-pin Deutsch connector is used to access the
J1587/ 1708 data bus and a 9-pin Deutsch connector can be used to access either the J1939 data bus or the J1587/1708 data bus.
Summary (4 of 4)
• Current trucks equipped with a J1939 data backbone are also fitted with a J1587/1708 bus.
• When accessing a specific ECM/ECM on a truck data bus with multiple electronic systems, you must first select the correct message identifier (MID) if using generic-reader software (such as ProLink).

















