28
Chapter 6 Applications of the Laplace Transform

Chapter 6 Applications of the Laplace Transform

01(0 ) ( )Cv i dC
λ λ−
−
−∞
= ∫
In analyzing the circuit , we first wrote down the differential equation using KVL
Initial condition
Taking Laplace Transform for both side
were
Inverse Back
( )i t
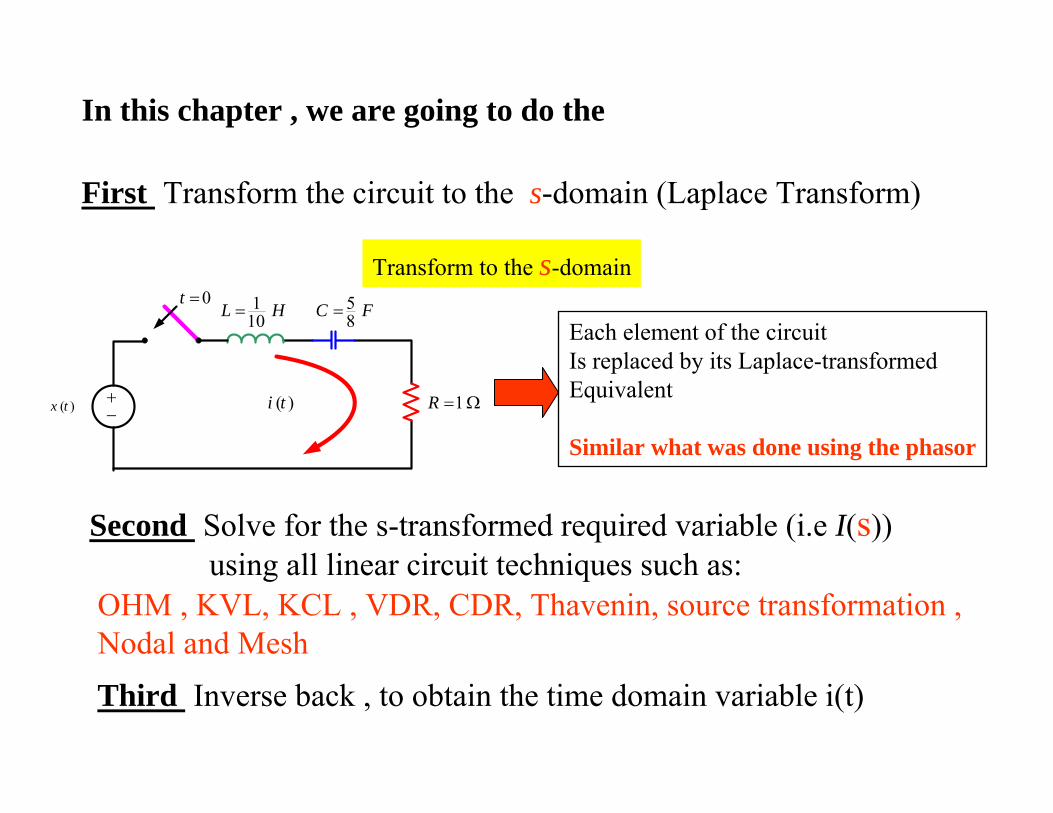
In this chapter , we are going to do the
Transform to the s-domain
Each element of the circuitIs replaced by its Laplace-transformedEquivalent
Similar what was done using the phasor
Transform)Laplacedomain (-sTransform the circuit to the First
))s(Ii.etransformed required variable (-Solve for the sSecondusing all linear circuit techniques such as:
)i(tInverse back , to obtain the time domain variable Third
OHM , KVL, KCL , VDR, CDR, Thavenin, source transformation , Nodal and Mesh
+−
1 R = Ω( ) i t
0 t = 1 10L H= 5 8C F=
( )x t




Example 6-1
R1 Z 1 R = Ω =⇒ Ω
2 2
0.5 2.5( ) ( )1 1
ssx t X ss s
=− ++ +
⇒
(0 ) 2 Cv V− = −(0 ) 0 Li V− =
L1 Z 10 10L H s= =⇒ Ω
C5 8 Z 58 F sC =⇒= Ω
+−
1 R = Ω
( )( ) 0.5 cos 2.5 sin ( )x t t t u t= − +
( ) i t
0 t = 110L H= 5 8C F=
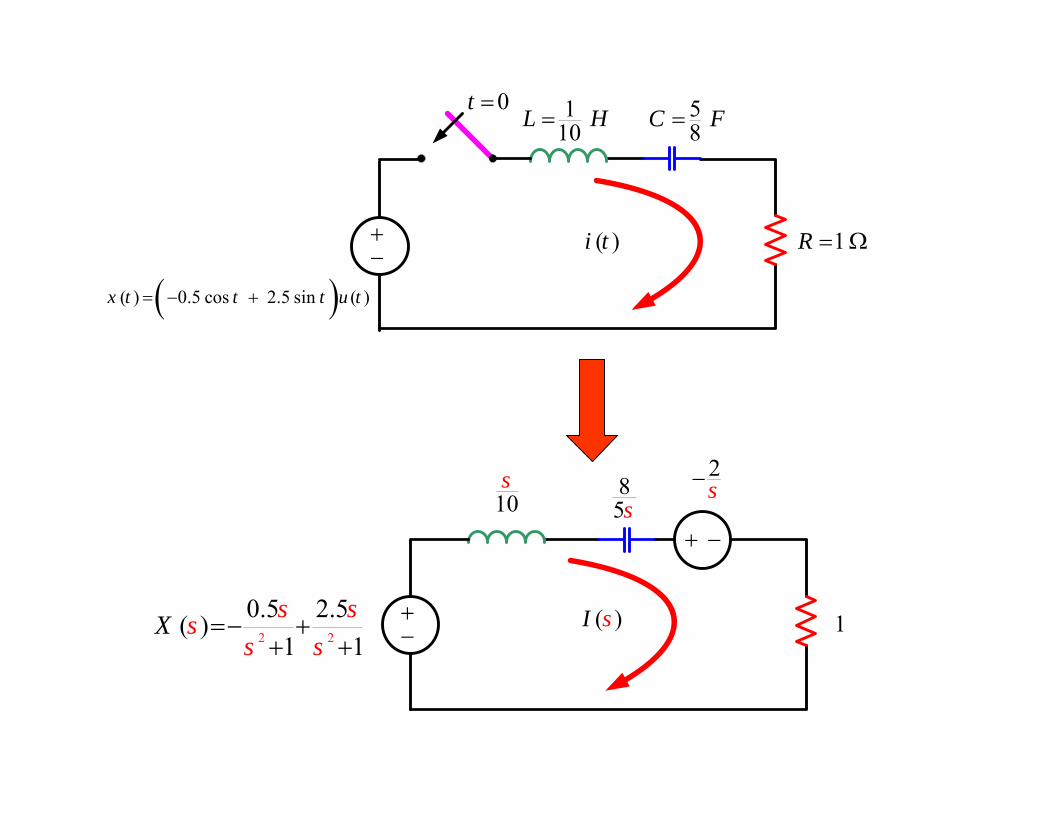
10s
+−
8 5s+ −
1
2s−
2 2
0.5 2.5( )1 1
X s sss s
=− ++ +
( ) I s
+−
1 R = Ω
( )( ) 0.5 cos 2.5 sin ( )x t t t u t= − +
( ) i t
0 t = 110L H= 5 8C F=
10s
+−
8 5s+ −
1
2s−
2 2
0.5 2.5( )1 1
X s sss s
=− ++ +
( ) I s
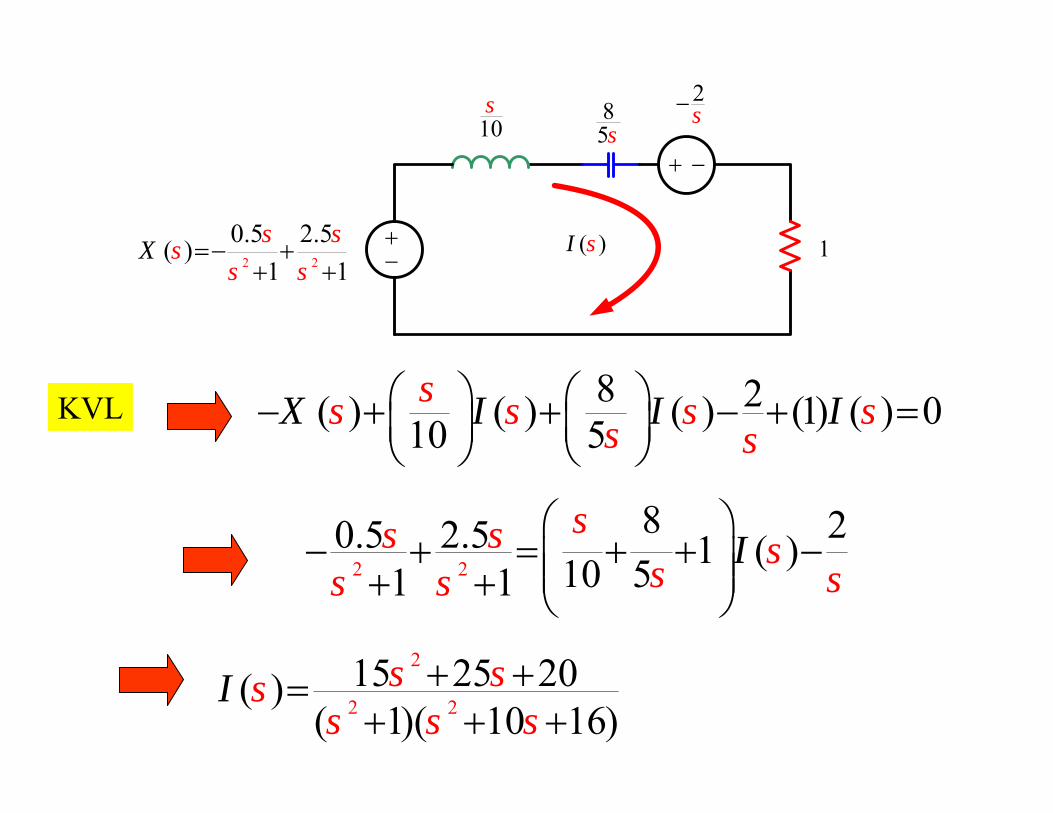
KVL 8 2( ) ( ) ( ) (1) ( ) 010 5X Iss s s ss sI I⎛ ⎞ ⎛ ⎞− + + − + =⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠
2 2
8 20.5 2.5 1 ( )10 51 1I
ss s ss ss s⎛ ⎞
− + = + + −⎜ ⎟⎜ ⎟+ + ⎝ ⎠2
2 215 25 20( )
( 1)( 10 16)s ss
s s sI + +=
+ + +
10s
+−
85s
+ −
1
2 s−
2 2
0.5 2.5( )1 1
X s sss s
=− ++ +
( ) I s
2
2 215 25 20( )
( 1)( 10 16)s ss
s s sI + +=
+ + +
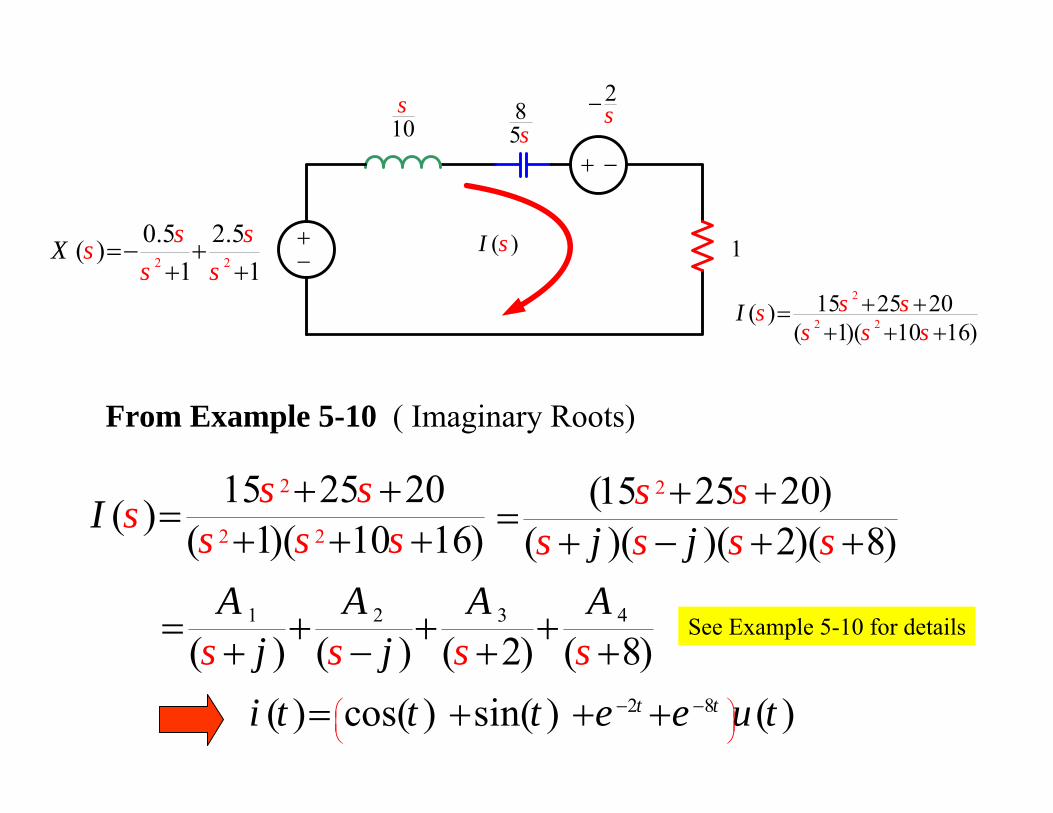
From Example 5-10 ( Imaginary Roots)
2
2 2
15 25 20( ) ( 1)( 10 16)s ss s s sI + +
=+ + +
2(15 25 20)( )( )( 2)( 8)j
s ss js s s
+ +=
+ − + +
1 2 3 4
( ) ( ) ( 2) ( 8)s s sA A A A
j sj= + + ++ − + +
2 8( ) cos( ) sin( ) ( )t ti t t t e e u t− −⎛ ⎞⎜ ⎟⎝ ⎠
= + + +
See Example 5-10 for details





6-4 Transfer FunctionsConsider the following circuit
+−
R( )x t ( ) i t
L
C
( )y t
+
−
input output
We want a relation (an equation) between the input x(t) and output y(t)
1( ) ' '( ) ( ) + ( )
tdi tx t L Ri t i t dtdt C
−∞
= + ∫KVL
2
2
( ) ( ) ( )( ) + dx t di t i tdi tL Rdt dt Cdt
= +

+−
R( )x t ( ) i t
L
C
( )y t
+
−
input output
2
2
( ) ( ) ( )( ) + dx t di t i tdi tL Rdt dt Cdt
= +
( )Since ( )
y ti t
R=
2
2
( ) ( ) ( )( ) + dx t L dy t y tdy t Rdt R dt RCdt
= +⇒
Writing the differential equation as 2
2
( ) ( )( ) + ( ) dx t dy tdy tRC LC RC y tdt dtdt
= +

+−
R( )x t ( ) i t
L
C
( )y t
+
−
input output
2
2
( ) ( )( ) + ( ) 1RC dx t dy tdy t y tdt dtd
LCt
RC= +
Real coefficients, non negative which results from system components R, L, C
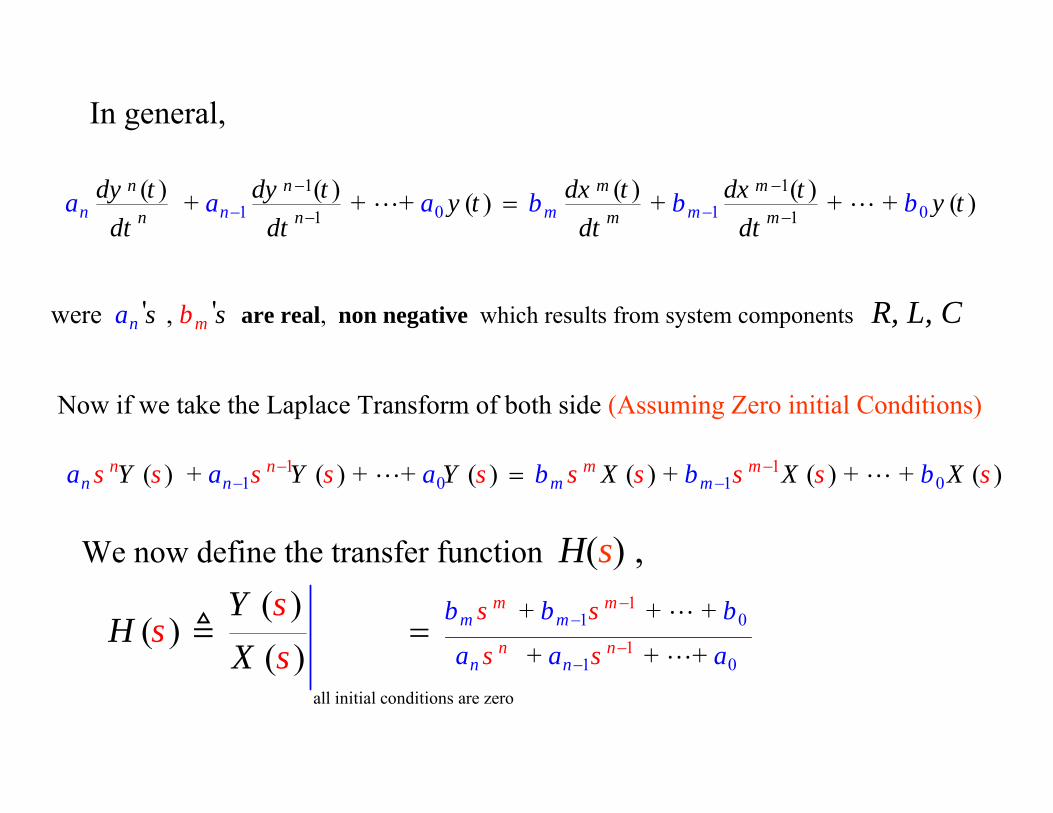
In general,
1 11 0 1 01 1
( ) ( ) ( ) ( ) + + + ( ) + + + ( )n n m m
n n m mn n m mdy t dy t dx t dx ty t y t
dt dt dt da a b b
ta b
− −
− −− −=
' 'were , n ms ba s are real, non negative which results from system components R, L, C
Now if we take the Laplace Transform of both side (Assuming Zero initial Conditions)
1 01
11
0( ) + ( ) + + ( ) ( ) + ( ) + + ( )n nn m
mn m
ma a a b bs s s s s s s s s sY Y bY X X X−− −
−=
We now define the transfer function H(s) ,
all initial conditions are zero
( )( )
( )Y
HX
ss
s1 0
1
11 0
+ + +
+ + + m m
n
m m
n nn
b b b
a a a
s s
s s −
−
−
−
=

1 11 0 1 01 1
( ) ( ) ( ) ( ) + + + ( ) + + + ( )n n m m
n n m mn n m mdy t dy t dx t dx ty t x t
dt dt dt da a b b
ta b
− −
− −− −=
1 01
1 0
1+ + +
+ + +
( )( ) ( )m
m
nm
n n
m
n
b b b
sa
s
as a
sYH ssXs
−−
−−
=
' 'Sin ce , n ms ba s are real, non negative
( ) ( )N sD s
The roots of the polynomials N(s) , D(s) are either real oroccur in complex conjugate
The roots of N(s) are referred to as the zero of H(s) ( H(s) = 0 )
The roots of D(s) are referred to as the pole of H(s) ( H(s) = ± ∞ )

The Degree of N(s) ( which is related to input) must be less than orEqual of D(s) ( which is related to output) for the system to be Bounded-input, bounded-output (BIBO)
( ) ( )N sD s
1 01
1 0
1+ + +
+ + +
( )( ) ( )m
m
nm
n n
m
n
b b b
sa
s
as a
sYH ssXs
−−
−−
=
Example :3 2
24 + 2 1
6 8( ) s s
ss
ssH + +
+ +=
Using polynomial division , we obtain 219 174 + 2 +
6 8( ) ss
s ssH − +
+ +=
Now assume the input x(t) = u(t) (bounded input) 1( ) s sX⇒ =
2
2 1 19 174 + + 6 8
( ) ( ) ( ) ss s s s
Y Xs s sH ⎛ ⎞⎜ ⎟⎜ ⎟⎝ ⎠
− ++ +
= =
1
219 174 ( ) + 2 +
( 6 8)( ) st
s s sy t Lδ
⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
− − ++ +
= unbounded
)
(
→ ∞
We see that for finite boundedInput (i.e x(t) =u(t) )We get an infinite (unbounded)output
for m n≤ BIBO

( ) ( )N sD s
1 01
1 0
1+ + +
+ + +
( )( ) ( )m
m
nm
n n
m
n
b b b
sa
s
as a
sYH ssXs
−−
−−
=
The poles of H(s) must have real parts which are negative
The poles must lie in the left half of the s-plan

Components of System Response
Consider the following differential equation ( Input / Output ),
1 0 0 ( ) ( ) ( ) dy t ya a bt x tdt + =
Taking Laplace Transform of both side,
1 0 0( ) (0 ) + ( ) )] ([ Y y Ya a bs s s sX−− =
1 0 10 ( ) ( ) (0[ )]s s sa Y X ya b a −− = +
1
1 0
0 ( ) (0 )( )
[ ] b as
aY
as
sX y −+
=−
1
1 0 1 0
0 (0 )
( ) ( ) + [ ] [ ]
s ss s
yb aa a a a
Y X−
=− −

1 0 0 ( ) ( ) ( ) dy t ya a bt x tdt + =
1
1 0 1 0
0 (0 )
( ) ( ) + [ ] [ ]
s ss s
yb aa a a a
Y X−
=− −
1 0
0
[ ]( ) ( )
Y
bs
a asX s=
−
all initial conditions are zero
( ) ( )( ) ( )( ) Y Ns sHX
s sDs
=1 0
0
][
sb
a a=
−
1
(0 )( ) ( ) ( ) +
( )s s
sy
Y H sXD
a −=
( ) ( ) ( ) + ( )sCH Xs
Ds
s=
A polynomial related to initial conditions
Transfer FunctionAll initial conditions are zeros
If initial conditions are zeros

1 0 0 ( ) ( ) ( ) dy t ya a bt x tdt + =
1
1 0 1 0
0 (0 )
( ) ( ) + [ ] [ ]
s ss s
yb aa a a a
Y X−
=− −
1
(0 )( ) ( ) ( ) +
( )s s
sy
Y H sXD
a −=
( ) ( ) ( ) + ( )sCH Xs
Ds
s=
A polynomial related to initial conditions
Transfer FunctionAll initial conditions are zeros
1 1 ( ) ( ) +
( )( [ ] ) ( )s sH X
sCy t L L D s
− − ⎡ ⎤⎢ ⎥⎣ ⎦
=
( ) ( ) + ( )y t y t y t=ZSR ZIR
Zero State Response
(Steady State)Zero State Response
(Steady State)
Example 6-7











![VDR G4[e] S-VDR G4[e] - INTERSCHALT · Innovation for shipping VDR G4[e] S-VDR G4[e] VOYAGE DATA RECORDER SYSTEMS Comply with all IMO performance standards Offer …](https://static.documents.pub/doc/80x56/5b5e09397f8b9a310a8b9cbf/vdr-g4e-s-vdr-g4e-innovation-for-shipping-vdr-g4e-s-vdr-g4e-voyage.jpg)





