27
Chapter 9 Some Basic Morphological Algorithm
| Date post: | 17-Dec-2015 |
| Category: |
Documents |
| Upload: | pamela-lucas |
| View: | 274 times |
| Download: | 3 times |
Chapter 9
Some Basic Morphological Algorithm

Some Basic Morphological Algorithm
Boundary Extraction Region Filling Extraction of Connected Components Convex Hull Thinning Thickening Skeletons Pruning

Boundary Extraction
The boundary of a set A denoted by
Where B is a suitable structuring element
1. Its algorithm is following these2. Eroding A by B3. Performing the set difference between
A and its erosion
)()( BAAA

Boundary Extraction
BA
B
A
)(A

Boundary Extraction
Region Filling
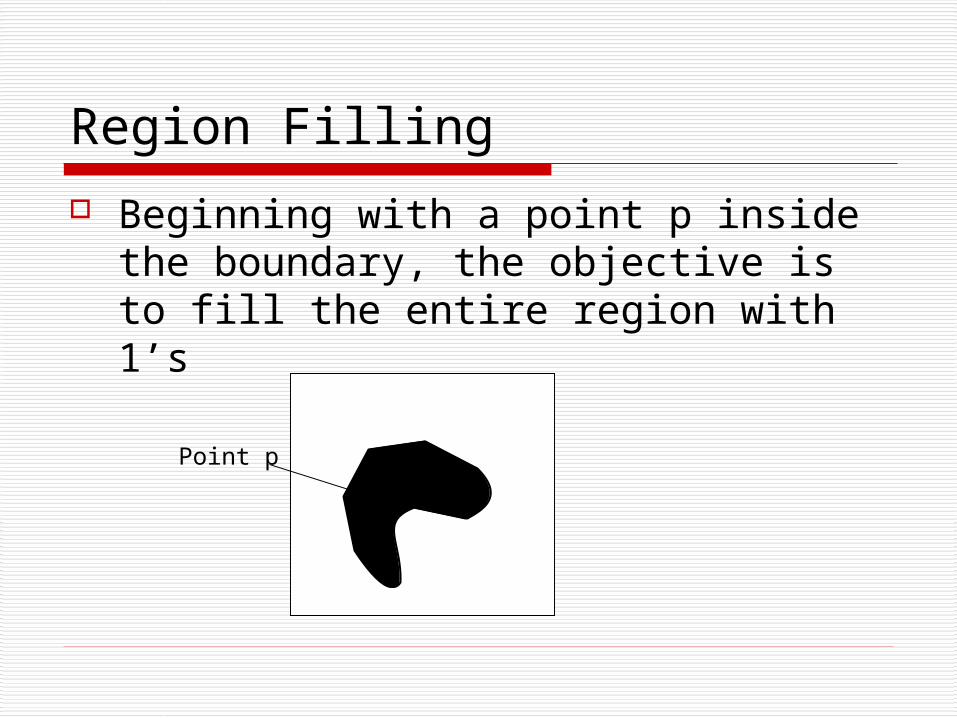
Beginning with a point p inside the boundary, the objective is to fill the entire region with 1’s
Point p

Region Filling
If all nonboundary (background) points are labeled 0, then we assign a value of 1 to p to begin. The following procedure then fill the region with 1’s
,...3,2,1)( 1 kwhereABXX ckk
Where X0 = p and B is the symmetric structuring element.
Region Filling Algorithm
1. Pick a point inside p given it value 12. Set X0 = p
3. Start k = 14. Repeat getting Xk by
5. Terminate process if Xk = Xk-1
6. The set union of Xk and A is answer
,...3,2,1)( 1 kwhereABXX ckk

Region Filling Algorithm

Region Filling Algorithm
p
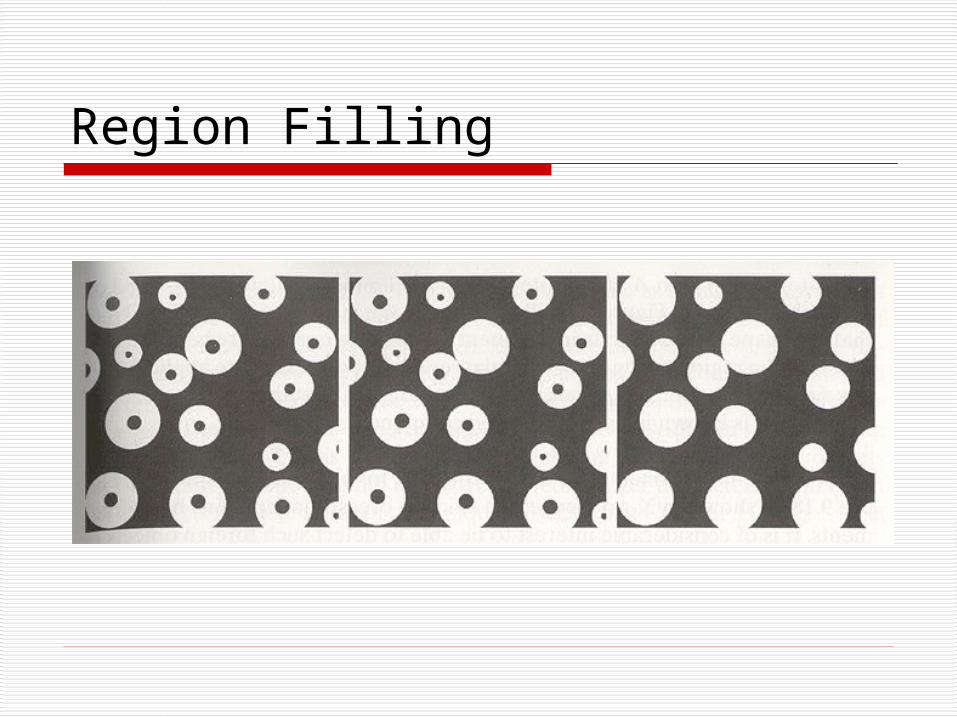
Region Filling

Connected Components Extraction
To establish if two pixels are connected, it must be determined if they are neighbors and if their gray levels satisfy a specified criterion of similary.
In practice, extraction of connected components in a binary image is central to many automated image analysis applications.

Connected Components Extraction
Let Y represent a connected component contained in a set A and assume that a point p of Y is known
Following expression
,...3,2,1)( 1 kwhereABXX kk
Where X0 = p and B is the symmetric structuring element.

Connected Components Extraction Algorithm
1. Pick a point of Y set p2. Set X0 = p
3. Start k = 14. Repeat getting Xk by
5. Terminate process if Xk = Xk-1
6. The answer set Y is Xk
,...3,2,1)( 1 kwhereABXX kk
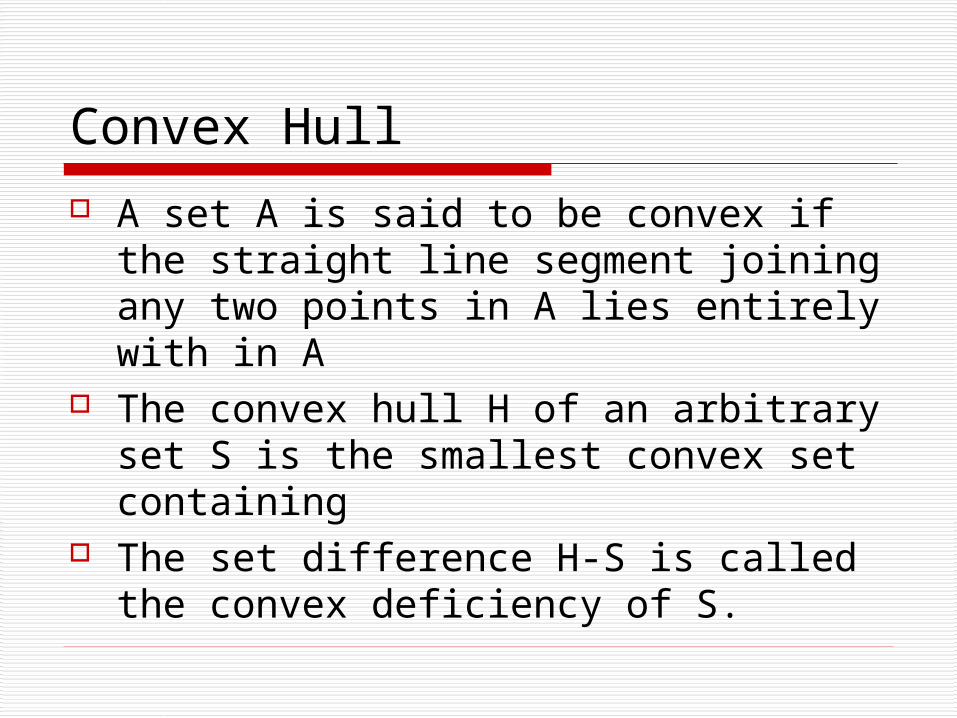
Convex Hull
A set A is said to be convex if the straight line segment joining any two points in A lies entirely with in A
The convex hull H of an arbitrary set S is the smallest convex set containing
The set difference H-S is called the convex deficiency of S.

Convex Hull Let Bi, i=1,2,3,4 represent 4 structure The procedure consists of implementing the
equation
Let , where the subscript “conv” (convergence) in the sense that
Then the convex hull of A is
,...3,2,14,3,2,1)( 1 kandiwhereABXX ik
ik
AXwith i 0iconv
i XD
4
1
)(
i
iDAC
ik
ik XX 1

Convex Hull Algorithm Set Do with B1
Repeat to apply hit-or-miss transformation to A with B1 until no further change occur Xn.
Union Xn with A, called D1
Do same as B1 with B2, B3, and B4; hence we will get D1, D2, D3 and D4
Union all of D will be the answer of convex hull
AXXXX 40
30
20
10

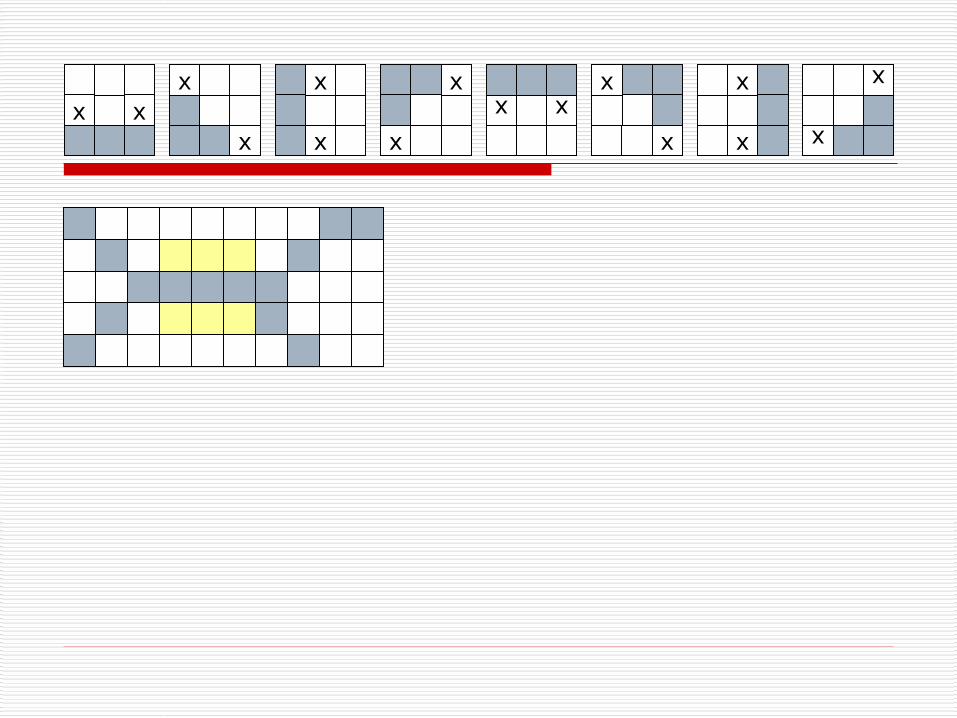
Convex Hull Algorithm
x
xxx
x
xxx xx x
xxx
xx x
xx x
B1 B2 B3 B4 x Don’t care
Background
Foreground
A

HIT-or-MISS A with B1
x
xxx
x

HIT-or-MISS A with B2xx
x xx

HIT-or-MISS A with B3 x
xxx
x

HIT-or-MISS A with B4
x xxx x

Convex Hull
1D3D
2D4D
4
1
)(
i
iDAC

Thinning The thinning of a set A by a structuring
element B, can be defined
Where Bi is a rotated version of Bi-1
Using this concept, we now define thinning as
cBAA
BAABA
)*(
)*(
,,...,,, 321 nBBBBB
))...))((...((}{ 21 nBBBABA

x xx
x
x
x x
x x
x
x x
x
x
x
x

Thickening The thickening of a set A by a structuring
element B, can be defined
Where Bi is a rotated version of Bi-1
Using this concept, we now define thinning as
)*( BAAAOB
,,...,,, 321 nBBBBB
))...))((...((}{ 21 nOBOBAOBBAO
x xx
x
x
x x
x x
x
x x
x
x
x
x

















